ĆWICZENIE 2
Badanie jakości i dokładności sterowania
2.1 Cel ćwiczenia
Celem ćwiczenia jest badanie stanu ustalonego i stanów przejściowych w układzie sterowania, w
którym obiekty (1.1)-(1.5) są sterowane przy pomocy sterownika proporcjonalnego (P). Badania
dotyczą zatem w pierwszej kolejności wpływu wzmocnienia takiego sterownika na wskaźniki
opisujące dokładność sterowania oraz jakość odpowiedzi skokowej.
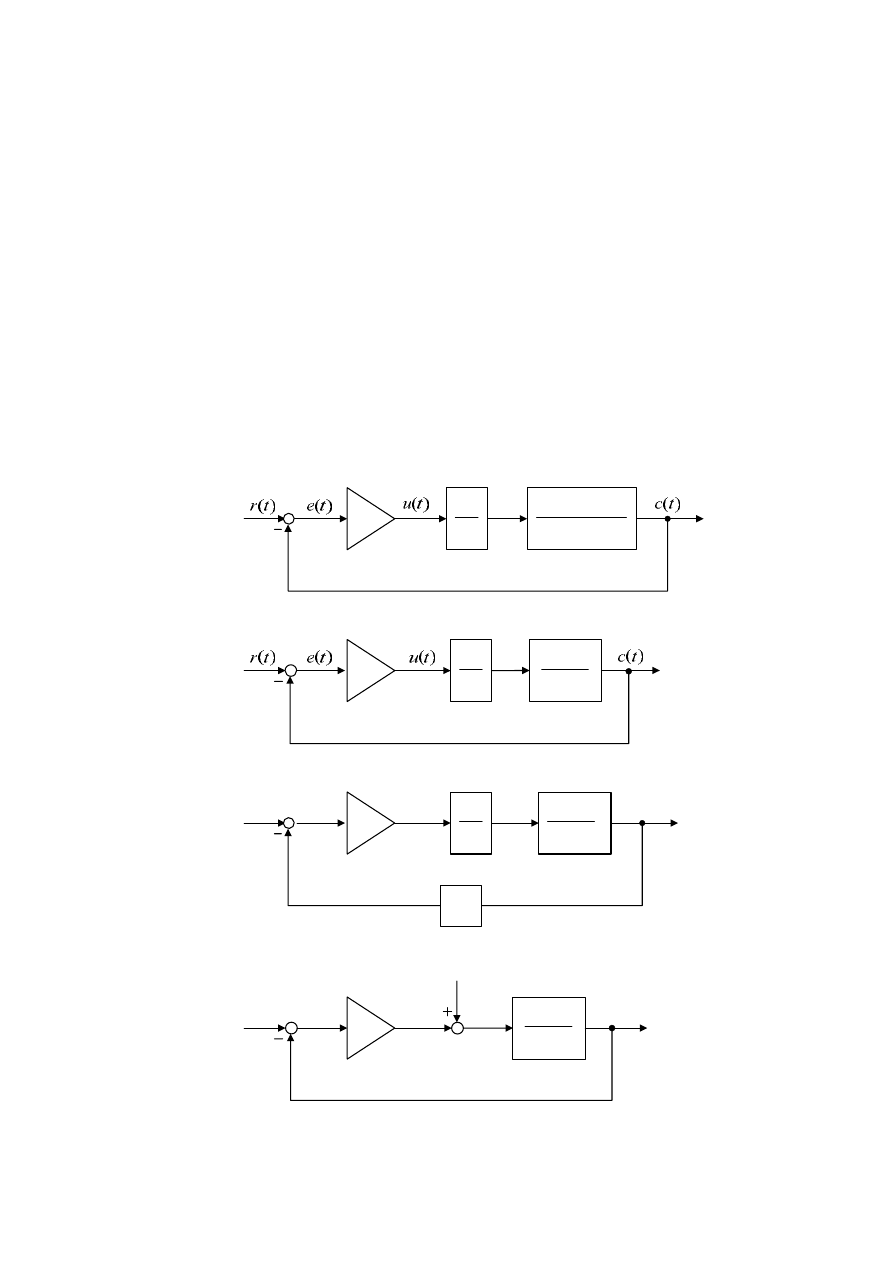
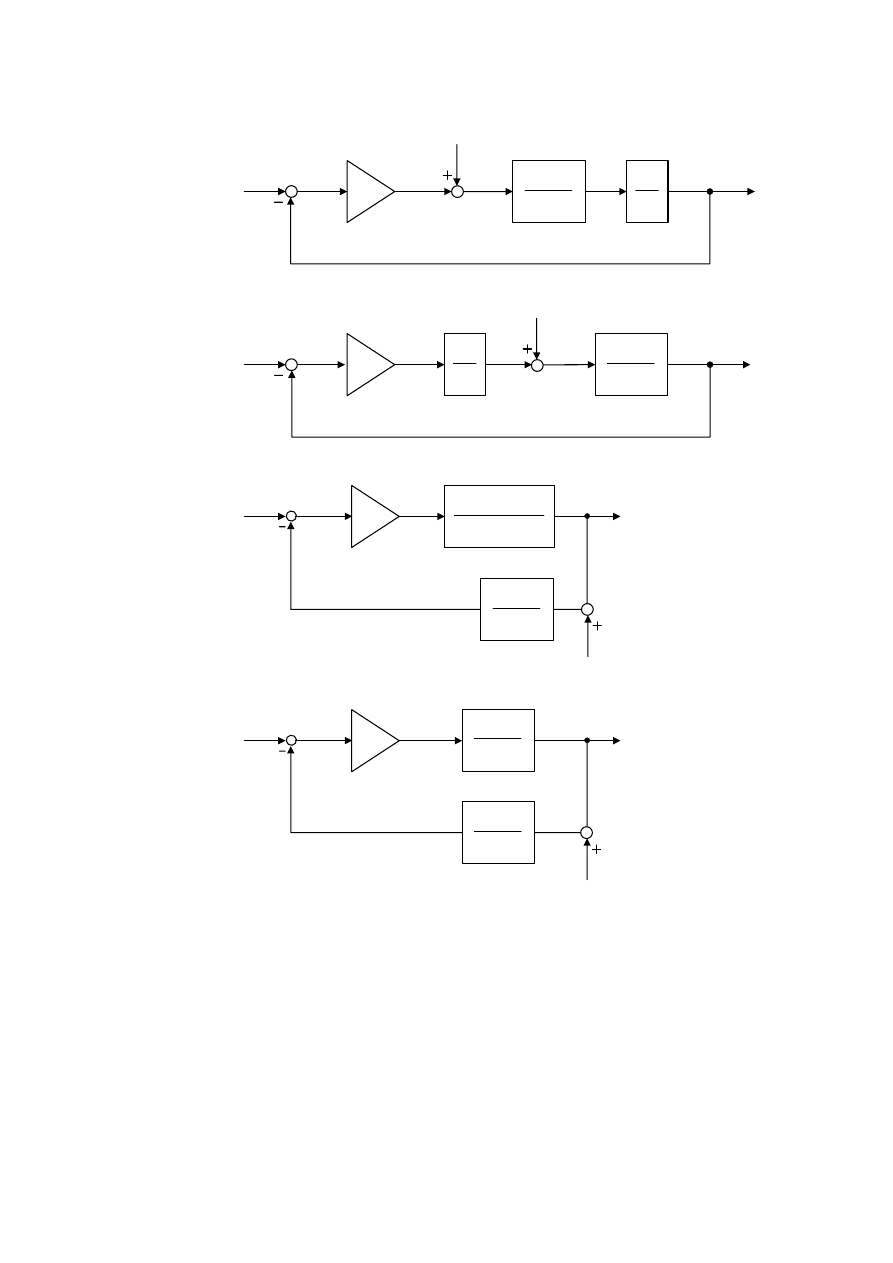
2.2 Badane modele zamkniętych układów sterowania
Schematy strukturalne badanych układów sterowania pokazano na Rys. 2.1. Na schematach tych
c
k
jest wzmocnieniem sterownika typu P. Wartość wzmocnienia ustala się potencjometrem obrotowym
według zależności
)
10
0
(
,
2
/
47
.
0
÷
=
+
=
n
n
k
c
, gdzie n jest liczbą obrotów.
i
sT
1
c
k
1
1
1
2
2
+
+ sa
a
s
(a)
i
sT
1
c
k
y
x
sT
sT
+
−
1
1
(b)
)
(t
r
)
(t
c
)
(t
e
)
(t
u
i
sT
1
1
+
p
p
sT
k
c
k
0
sT
e
−
(c)
)
(t
r
)
(t
c
1
+
p
p
sT
k
)
(t
a
)
(t
d
)
(t
e
)
(t
u
c
k
(d)
)
(t
r
)
(t
c
i
sT
1
1
+
p
p
sT
k
)
(t
a
)
(t
d
)
(t
e
)
(t
u
c
k
(e)
)
(t
r
)
(t
c
)
(t
e
)
(t
u
i
sT
1
1
+
p
p
sT
k
)
(t
a
)
(t
d
c
k
(f)
)
(t
r
)
(t
c
)
(t
a
)
(t
d
1
+
p
p
sT
k
)
(t
u
c
k
1
1
1
2
2
+
+ sa
a
s
(g)
)
(t
r
)
(t
c
)
(t
a
)
(t
d
1
+
p
p
sT
k
)
(t
u
c
k
y
x
sT
sT
+
−
1
1
(h)
Rys. 2.1 (a)-(g). Strukturalne schematy badanych układów sterowania.
Sygnał c t
( )
, będący wyjściem obiektu, jest zmienną sterowaną, sygnał r t
( )
jest sygnałem wielkości
zadającej, d t
( ) odpowiada zakłóceniu, sprowadzonemu do obiektu, sygnał e t
( ) jest uchybem
sterowania, u t
( ) jest sygnałem sterującym (wyjście sterownika), zaś a t
( ) oznacza sygnał
aktualizujący.
2.3 Zadania do wykonania
2.3a)
Stabilność układu sterowania.
Dla jakich wartości wzmocnienia sterownika proporcjonalnego
c
k
zamknięte układy
sterowania z Rys. 2.1 (a)-(h) są stabilne? Zastosować odpowiednie kryteria stabilności.
2.3b) Badanie widmowych własności układu sterowania.
Zbadać wpływu wzmocnienia sterownika
c
k na charakterystyki częstotliwościowe
zamkniętych układów sterowania z Rys. 2.1 (a)-(c).
2.3c) Badanie wskaźników odpowiedzi skokowej układu sterowania.
Zbadać wpływ wzmocnienia sterownika
c
k na wskaźniki odpowiedzi skokowej zamkniętych
układów sterowania z Rys. 2.1 (a)-(c). Pomierzyć zależność uchybu ustalonego od
wzmocnienia tego sterownika
c
k
.
2.3d) Badanie wpływu zakłóceń w układach sterowania.
Ustalając wartość sygnału zadanego i wprowadzając na wejście obiektów z Rys. 2.1 (d)-(h)
zakłócenia harmoniczne o częstotliwości 50Hz, zbadać zależność amplitudy wywołanych
zakłóceniami oscylacji sygnału wyjściowego układu zamkniętego od wzmocnienia
sterownika.
2.4 Opracowanie wyników
W sprawozdaniu z ćwiczenia należy:
2.4a) Zamieścić wykresy linii pierwiastkowych, charakterystyk Bodego oraz Nyquista badanych
układów z Rys. 2.1 (a)-(h).
2.4b) W oparciu o modele sterowanych obiektów, uzasadnić analitycznie wyniki wszystkich
pomiarów, w tym także wyniki badania jakości odpowiedzi skokowej oraz dokładności
sterowania (na podstawie punktów 2.3a-d).
2.4c) Omówić wpływ wzmocnienia sterownika typu P na postać wszystkich procesów
przejściowych w badanych układach sterowania (to znaczy c t
( ) , e t
( ) , u t
( ) oraz a t
( ) ).
2.4d) Dla modeli sterowanych obiektów z Rys. 2.1(d)-(h), przyjmując wybraną wartość
wzmocnienia sterownika typu P, obliczyć i wykreślić następujące charakterystyki
amplitudowe:
)
(
)
(
|
)
(
|
ω
ω
=
ω
R
E
G
re
,
)
(
)
(
|
)
(
|
ω
ω
=
ω
R
U
G
ru
,
)
(
)
(
|
)
(
|
ω
ω
=
ω
D
E
G
de
oraz
)
(
)
(
|
)
(
|
ω
ω
=
ω
D
U
G
du
.
Jakie praktyczne wnioski wynikają z analizy tych charakterystyk?
Wyszukiwarka
Podobne podstrony:
Cwiczenie nr 8 id 99953 Nieznany
Cwiczenie nr 2 4 id 99899 Nieznany
Cwiczenie nr 1 id 594720 Nieznany
Cwiczenie Nr 3 id 125025 Nieznany
Cwiczenie nr 3 id 99908 Nieznany
cwiczenie nr 2 3 id 125714 Nieznany
Cwiczenie nr 3 4 id 99915 Nieznany
cwiczenie nr 5 id 125729 Nieznany
CWICZENIE NR 0 id 99867 Nieznany
Cwiczenie Nr 5 3 id 125728 Nieznany
Cwiczenie nr 3 v 1 id 99918 Nieznany
Cwiczenie Nr 2 2 id 99897 Nieznany
cwiczenie nr 2 3 id 125717 Nieznany
E i P P Cwiczenie nr 1 id 14876 Nieznany
Cwiczenie nr 1 3 id 99872 Nieznany
Cwiczenie nr 6 id 125731 Nieznany
Cwiczenie nr 8 id 99953 Nieznany
Fizjologia Cwiczenia 11 id 1743 Nieznany
Biologia Cwiczenia 11 id 87709 Nieznany (2)
więcej podobnych podstron