1. Czym zajmuje si
ę
statyka?
Statyka to dział mechaniki zajmuj
ą
cy si
ę
równowag
ą
układów sił. Statyka jako dział mechaniki
ogólnej wykorzystuje nast
ę
puj
ą
ce zasady (aksjomaty), których si
ę
nie udowadnia, a przyjmuje
jako pewniki.
2. Co nazywamy układem sił?
Zbiór dowolnej liczby sił jednocze
ś
nie działaj
ą
cych na ciało nazywamy układem sił.
3. Dokona
ć
podziału sił i ich układów.
Siły mechaniczne
Zewn
ę
trzne
Wewn
ę
trzne
Czynne
Reakcje
Mi
ę
dzycz
ą
steczkowe
Napi
ę
cia
(bierne)
a) Układ płaski - odznacza si
ę
tym,
ż
e wszystkie siły tworz
ą
ce ten układ le
żą
w jednej
płaszczy
ź
nie. Układy te mo
ż
emy podzieli
ć
na:
- układ płaski zbie
ż
ny – jest zbiorem ( w jednej płaszczy
ź
nie) sił, których lini
ę
działania przecinaj
ą
si
ę
w jednym punkcie.
- układ płaski równoległy – jest zbiorem ( w jednej płaszczy
ź
nie) sił, których linie działania s
ą
do
siebie równoległe. Szczególnym przypadkiem takiego układu s
ą
siły działaj
ą
ce wzdłu
ż
wspólnej
prostej.
- układ płaski dowolny - jest zbiorem (w jednej płaszczy
ź
nie) sił o ró
ż
nych kierunkach działania.
b) Układ przestrzenny
4. Poda
ć
brzmienie trzeciego prawa Newtona (dla dwóch brył)?
Je
ż
eli ciało A działa na ciało b pewn
ą
sił
ą
F to ciało B działa na ciało A sił
ą
F o tym samej warto
ś
ci
i kierunku ale o przeciwnym zwrocie.
5. Na jakie grupy dzielimy wi
ę
zy ograniczaj
ą
ce swobod
ę
ruchu ciała?
Podpory ruchoma - Reakcja podpory ruchomej jest zaczepiona w punkcie styczno
ś
ci ciała z
podpor
ą
i ma zawsze kierunek prostopadły do powierzchni podpieranej (niezale
ż
nie od
kierunków sił działaj
ą
cych na ciało podpierane).
Podpora stała - Tego rodzaju wi
ę
zy uniemo
ż
liwiaj
ą
przesuni
ę
cie ciała, lecz umo
ż
liwiaj
ą
obrót
wokół punktu podparcia. Kierunek reakcji nie znany, rzutujemy na os x i y.
Wi
ę
zy wiotkie - Zaliczamy tu sznury, liny, ła
ń
cuchy itp. Siła w takich wi
ę
zach jest zawsze
skierowana wzdłu
ż
osi tych wi
ę
zów.
Przegub kulisty
Przegub walcowy
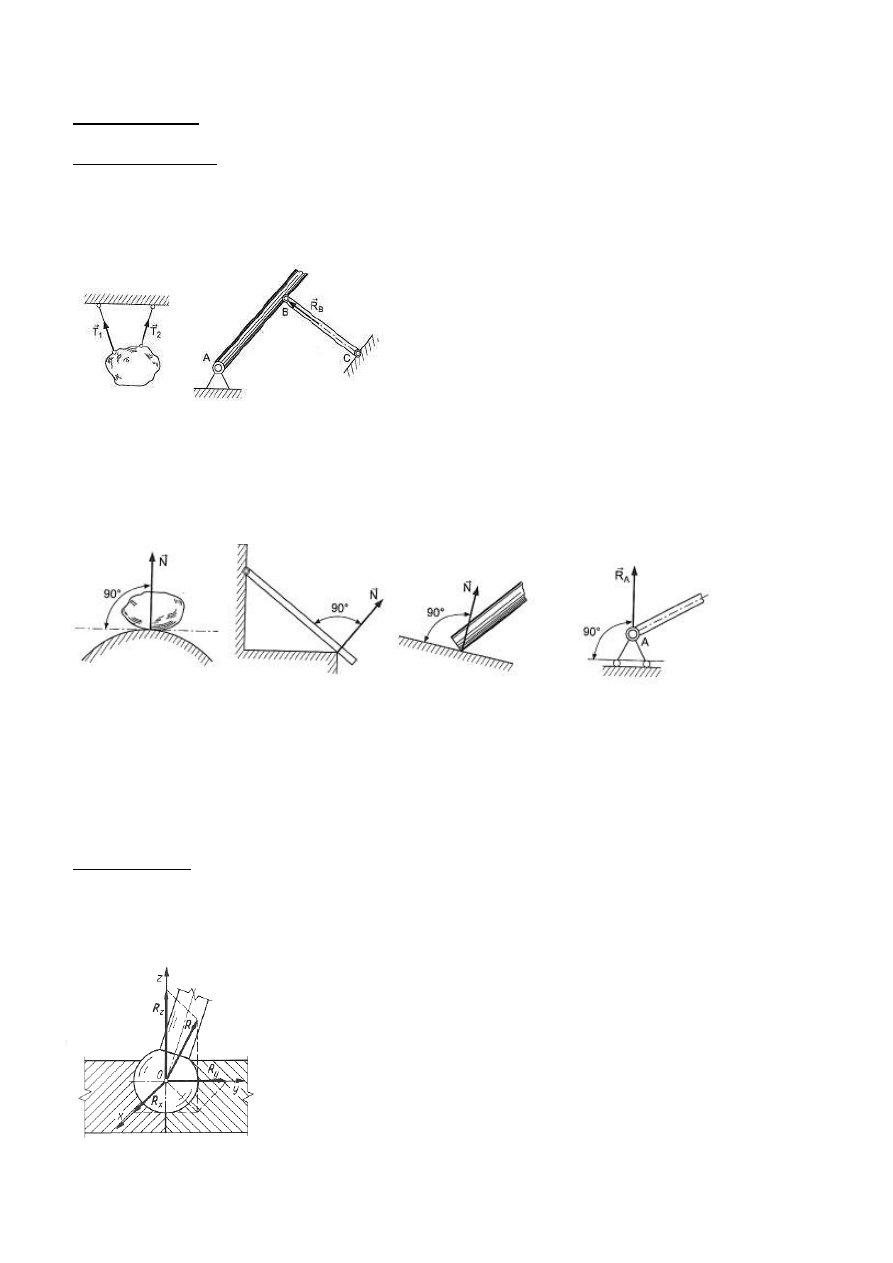
6. Jak działaj
ą
reakcje w ci
ę
gnach? Zilustrowa
ć
przykładami.
Reakcja w ci
ę
gnach jest jak w wi
ę
zach wiotkich czyli skierowana wzdłu
ż
ci
ę
gna a jej zwrot jest
skierowany w gór
ę
.
7. Jak działaj
ą
reakcje w podporach gładkich-przesuwnych? Zilustrowa
ć
przykładami.
Reakcja podpory ruchomej jest zaczepiona w punkcie styczno
ś
ci ciała z podpor
ą
i ma zawsze
kierunek prostopadły do powierzchni podpieranej (niezale
ż
nie od kierunków sił działaj
ą
cych na
ciało podpierane). Podpor
ę
ruchom
ą
oznaczamy schematycznie za pom
ą
c
ą
trójk
ą
ta
równobocznego dodatkowo podkre
ś
lonego lini
ą
, która przedstawia powierzchni
ę
podpieraj
ą
ca.
8. Jak działaj
ą
reakcje w podporach chropowatych-nieprzesuwnych? Zilustrowa
ć
przykładami.
Reakcja zaczepiona jest w punkcie styczno
ś
ci ciała z podpor
ą
i ma na ogół kierunek nie
prostopadły do płaszczyzny. Kierunek reakcji nie znany, rzutujemy na os x i y.
9. Jak działaj
ą
reakcje w przegubach walcowych i kulistych? Zilustrowa
ć
przykładami.
Przegub kulisty składa si
ę
z pr
ę
ta o zako
ń
czeniu w kształcie kuli, która jest osadzona w kulistym
ło
ż
ysku (rys. 3.5a). Podpora taka unieruchamia koniec pr
ę
ta, ale umo
ż
liwia jego obrót wokół
dowolnej osi. Kierunek reakcji R powstaj
ą
cej w przegubie kulistym jest nieznany, jednak przy
braku tarcia b
ę
dzie ona przechodzi
ć
przez
ś
rodek kuli. Zatem do jej okre
ś
lenia w przestrzeni
nale
ż
y zna
ć
trzy współrz
ę
dne: R
x
, R
y
i R
z
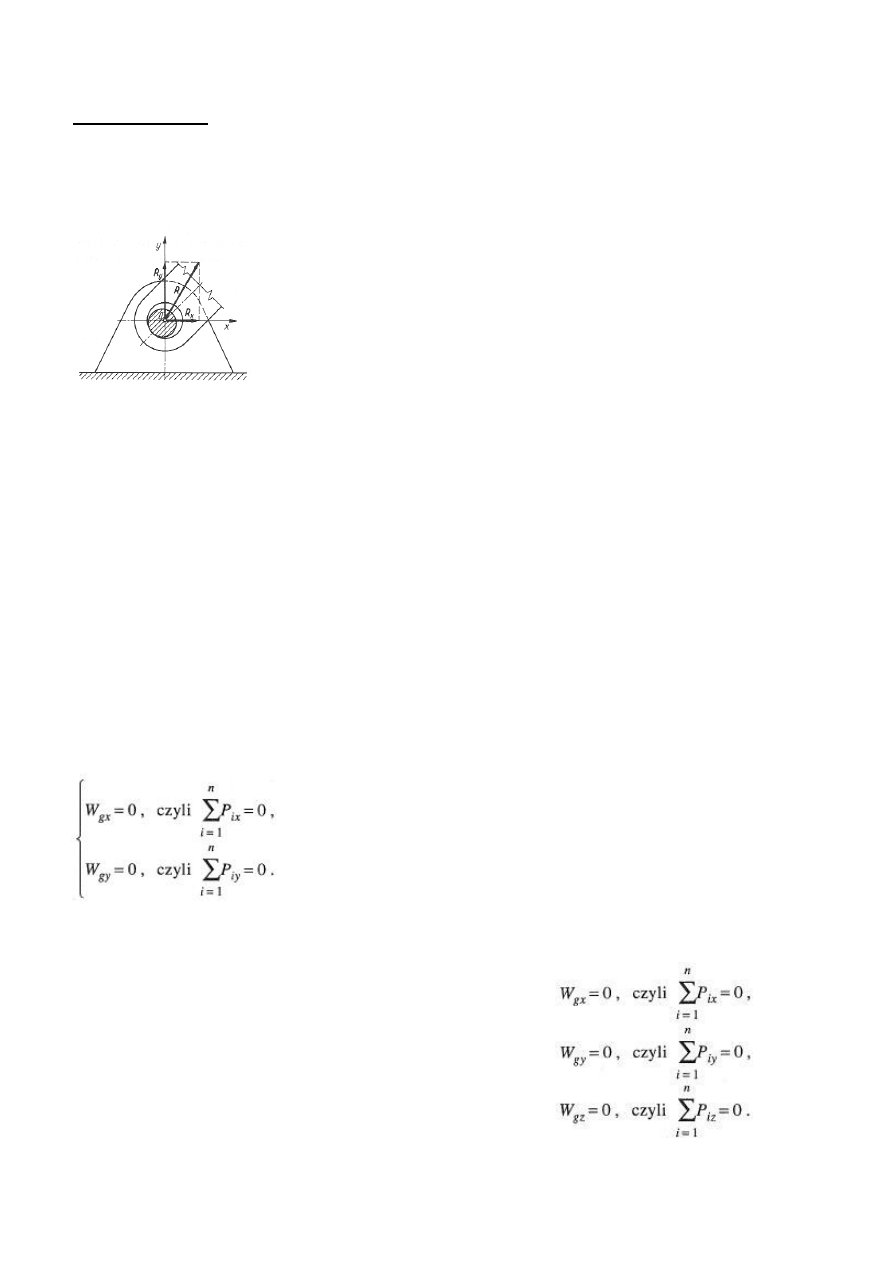
Przegub walcowy jest wykonany w postaci poł
ą
czenia sworzniowego. Koniec pr
ę
ta jest osadzony
na walcowym sworzniu przechodz
ą
cym przez kołowy otwór wykonany w tym pr
ę
cie (rys. 3.5b). W
przypadku braku tarcia reakcja sworznia R na pr
ę
t b
ę
dzie miała kierunek prostopadły do
powierzchni styku, czyli jej kierunek przejdzie przez o
ś
sworznia. Reakcja ta b
ę
dzie le
ż
e
ć
w
płaszczy
ź
nie prostopadłej do osi sworznia.
Do jej wyznaczenia s
ą
potrzebne dwie niewiadome: R
x
i R
y
.
10. Jak działaj
ą
reakcje w utwierdzeniach-zamocowaniach? Zilustrowa
ć
przykładem.
Utwierdzenie polega na całkowitym unieruchomieniu np. belki przez wmurowanie jej ko
ń
ca w
ś
cian
ę
, przyspawanie lub przykr
ę
cenie do
ś
ciany. Podpora taka uniemo
ż
liwia przemieszczanie
si
ę
utwierdzonego ko
ń
ca w dwóch kierunkach i obrót wokół tego ko
ń
ca. W miejscu utwierdzenia
A wyst
ą
pi reakcja utwierdzenia R
A
i moment utwierdzenia M
A
. Taka podpora wprowadza do
zadania trzy niewiadome: R
ax
, R
ay
i M
A
.
11. Poda
ć
definicj
ę
twierdzenia o trzech siłach.
Je
ż
eli ciało sztywne jest w równowadze pod działaniem trzech nierównoległych sił le
żą
cych w
jednej płaszczy
ź
nie, to linie działania tych sił musz
ą
przecina
ć
si
ę
w jednym punkcie, a siły
tworzy
ć
trójk
ą
t zamkni
ę
ty.
12. Poda
ć
warunki równowagi płaskiego
ś
rodkowego układu sił (definicja, zapis).
Aby płaski układ sił zbie
ż
nych był w równowadze, warunkiem koniecznym i wystarczaj
ą
cym jest,
by sumy rzutów tych sił na dwie osie układu współrz
ę
dnych były równe zeru.
13. Poda
ć
warunki równowagi przestrzennego
ś
rodkowego układu sił (definicja, zapis).
Aby przestrzenny układ sił zbie
ż
nych był w równowadze,
warunkiem koniecznym i wystarczaj
ą
cym jest, by suma
rzutów tych sił na ka
ż
d
ą
o
ś
układu współrz
ę
dnych była
równa zeru.
14. Poda
ć
definicj
ę
momentu siły wzgl
ę
dem punktu (bieguna).
Moment siły wzgl
ę
dem punktu jest to iloczyn warto
ś
ci siły i jej ramienia.
15. Poda
ć
definicj
ę
wektora głównego i momentu głównego (dla układu płaskiego sił).
Momentem głównym dowolnego układu sił na płaszczy
ź
nie wzgl
ę
dem przyj
ę
tego bieguna O
nazywamy sum
ę
algebraiczn
ą
momentów poszczególnych sił tego układu wzgl
ę
dem tego
samego bieguna O.
Dowolny przestrzenny układ sił działaj
ą
cych na ciało sztywne mo
ż
emy zast
ą
pi
ć
wektorem
głównym R, przyło
ż
onym do dowolnie wybranego
ś
rodka redukcji O, równym sumie
geometrycznej wszystkich sił układu oraz momentem głównym Mo, równym sumie
geometrycznej momentów tych sił wzgl
ę
dem
ś
rodka redukcji.
Wektor główny obliczamy ze wzoru:
lub je
ż
eli znane s
ą
składowe sił w prostok
ą
tnym układzie współrz
ę
dnych, wektor główny
obliczamy ze wzoru:
16. Poda
ć
warunki równowagi płaskiego dowolnego układu sił (definicja, zapis).
Warunkiem koniecznym i wystarczaj
ą
cym równowadze płaskiego dowolnego układu sił jest, aby
sumy algebraiczne rzutów sił na ka
ż
d
ą
z dwóch nierównoległych osi równały si
ę
zeru oraz suma
momentów sił wzgl
ę
dem dowolnie obranego bieguna na płaszczy
ź
nie działania tych sił była
równa zeru.
17. Poda
ć
warunki równowagi przestrzennego dowolnego układu sił:
Warunkiem równowagi przestrzennego dowolnego układu sił jest aby algebraiczne sumy rzutów
wszystkich sił na 3 osie prostok
ą
tnego układu współrz
ę
dnych były równe 0 oraz aby algebraiczne
sumy rzutów momentów wszystkich sił wzgl
ę
dem tych 3 osi były równe 0.
Przestrzenny dowolny
układ pozostaje w równowadze, gdy:
ܹ
g
= 0 i
ܯ
g
= 0
18. Poda
ć
wzory na okre
ś
lenie współrz
ę
dnych
ś
rodka ci
ęż
ko
ś
ci figury płaskiej.
F - pole figury płaskiej
19. Zdefiniowa
ć
momenty statyczne figury płaskiej wzgl
ę
dem osi.
Momentem statycznym figury płaskiej wzgl
ę
dem dowolnej osi nazywamy iloczyn pola tej figury i
współrz
ę
dnej
ś
rodka ci
ęż
ko
ś
ci tej figury wzgl
ę
dem tej samej osi.
20. Czym zajmuje si
ę
wytrzymało
ść
materiałów.
Wytrzymało
ść
materiałów zajmuje si
ę
badaniem zjawisk wyst
ę
puj
ą
cych w ciałach rzeczywistych,
to jest w ciałach odkształconych pod wpływem przyło
ż
onych do nich obci
ąż
e
ń
.
21. Jakie 4 warunki nale
ż
y spełni
ć
aby poprawnie zaprojektowa
ć
element konstrukcyjny z
punktu widzenia wytrzymało
ś
ci:
1. Warunek bezpiecze
ń
stwa - pozwala na ustalenie czy pod wpływem zało
ż
onego obliczenia
obci
ąż
enia element nie ulegnie zniszczeniu.
2. Warunek sztywno
ś
ci - umo
ż
liwia ograniczenie odkształce
ń
elementu tak, aby nie utrudniały
one b
ą
d
ź
wr
ę
cz nie uniemo
ż
liwiały nale
ż
ytego jego funkcjonowania.
3. Warunek stateczno
ś
ci - zabezpiecza niektóre elementy konstrukcyjne przed znacznymi
odkształceniami spowodowanymi obci
ąż
eniem,
ż
e powoduj
ą
zmian
ę
ich pierwotnej postaci , a
zatem zmian
ę
charakteru pracy tych elementów.
4. Warunek ekonomiczno
ś
ci konstrukcji - zapewnia wykonanie elementu z materiału najbardziej
odpowiedniego ze wzgl
ę
du na dany rodzaj obci
ąż
enia z równoczesnym pełnym wykorzystaniem
własno
ś
ci wytrzymało
ś
ciowych tworzywa.
22. Co rozumiemy pod poj
ę
ciem sił zewn
ę
trznych w wytrzymało
ś
ci materiałów?
Pod poj
ę
ciem sił zewn
ę
trznych rozumiemy siły czynne czyli obci
ąż
enia oraz siły bierne czyli
reakcje. Zarówno obci
ąż
enia i reakcje działaj
ą
na dane ciało z zewn
ą
trz.
23. Co rozumiemy pod poj
ę
ciem sił wewn
ę
trznych w wytrzymało
ś
ci materiałów?
Siły wewn
ę
trzne s
ą
to siły z jakimi oddziaływaj
ą
na siebie cz
ą
stki wewn
ą
trz ciała przeciwdziałaj
ą
c
ka
ż
dej zmianie odległo
ś
ci poszczególnych jego punktów.
24 Poda
ć
3 zasadnicze rodzaje obci
ąż
enia konstrukcji.
- rozci
ą
ganie ,
ś
ciskanie
- skr
ę
canie ,
ś
cinanie
- zginanie
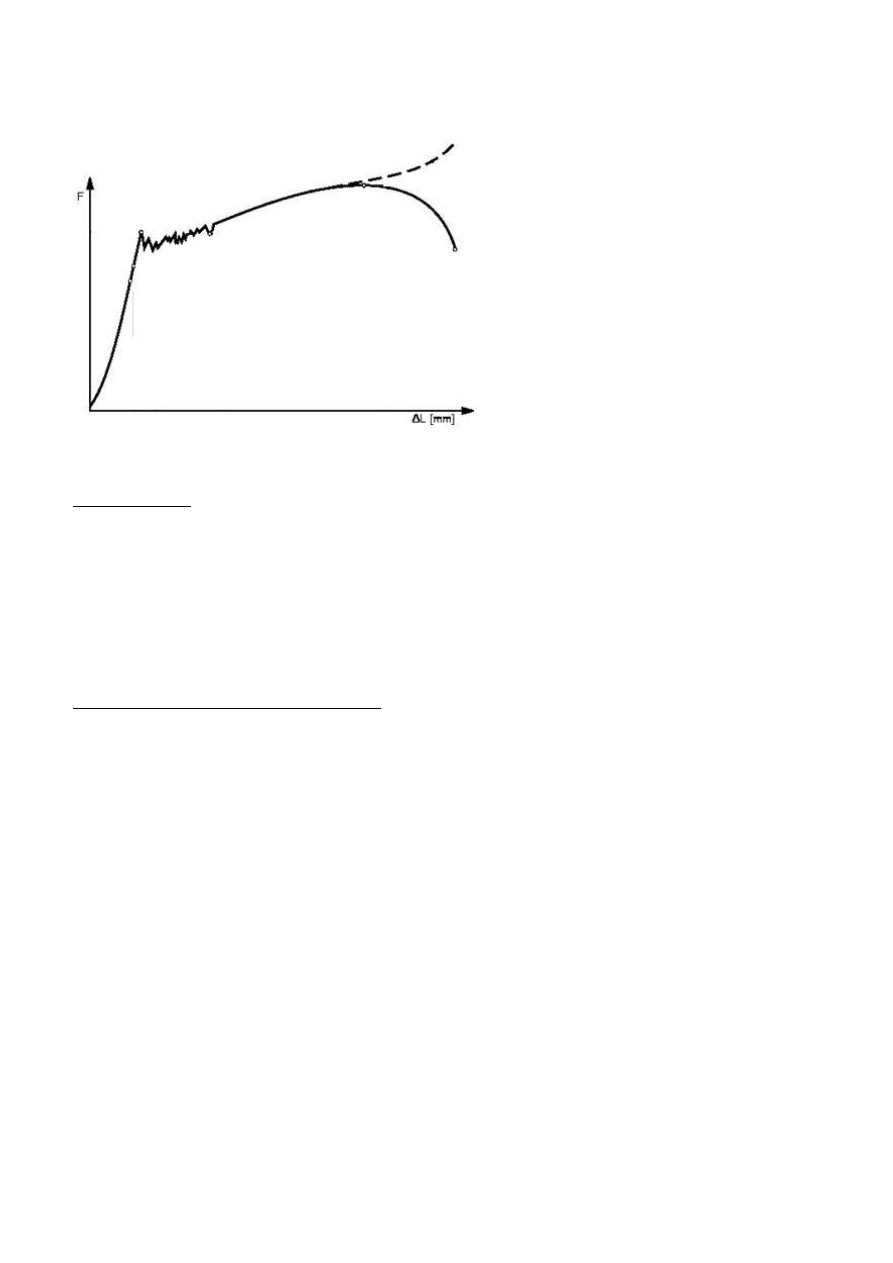
25. Wykres rozci
ą
gania dla stali mi
ę
kkiej.
26. Poda
ć
prawo Hooke'a dla rozci
ą
gania, co to jest sztywno
ść
pr
ę
ta na rozci
ą
ganie?
Prawo Hooke'a – prawo mechaniki okre
ś
laj
ą
ce zale
ż
no
ść
odkształcenia od napr
ęż
enia. Głosi
ono,
ż
e odkształcenie ciała pod wpływem działaj
ą
cej na
ń
siły jest wprost proporcjonalne do tej
siły. Ta prawidłowo
ść
pozostaje prawdziwa tylko dla niezbyt wielkich odkształce
ń
, nie
przekraczaj
ą
cych tzw. granicy Hooke'a (zwanej te
ż
granic
ą
proporcjonalno
ś
ci), i tylko dla
niektórych materiałów. Odkształcenie tego rodzaju znika, gdy przyło
ż
ona siła przestaje działa
ć
.
Współczynnik mi
ę
dzy sił
ą
a odkształceniem jest cz
ę
sto nazywany współczynnikiem (modułem)
spr
ęż
ysto
ś
ci.
27. Poda
ć
definicj
ę
momentu bezwładno
ś
ci figury płaskiej.
Momentem bezwładno
ś
ci figury płaskiej o polu F wzgl
ę
dem dowolnej osi le
żą
cej w płaszczy
ź
nie
figury nazywamy sum
ę
iloczynów elementarnej powierzchni dF figury i kwadratów ich odległo
ś
ci
od bieguna.
28. Poda
ć
wzór Steinera.
Moment bezwładno
ś
ci wzgl
ę
dem osi jest równy sumie momentu bezwładno
ś
ci wzgl
ę
dem
równoległej osi centralnej oraz iloczynu pola F figury i kwadratu odległo
ś
ci miedzy nimi.
29. Poda
ć
warunek wytrzymało
ś
ci elementu rozci
ą
ganego.
Gr < kr
Gr = P / F < kr
kr - wytrzymało
ść
na rozci
ą
ganie
30. Poda
ć
warunek wytrzymało
ś
ci elementu
ś
cinanego.
Tt < kt Tt = F / S < kt
kt - wytrzymało
ść
na
ś
cinanie
F - siła zewn
ę
trzna tn
ą
ca
S - pole przekroju poprzecznego
31. Poda
ć
warunek wytrzymało
ś
ci elementu skr
ę
canego.
Ts = Ms / Ws < ks
ks - wytrzymało
ść
na skr
ę
canie
Ms - moment skr
ę
caj
ą
cy
Ws - wska
ź
nik wytrzymało
ś
ci na skr
ę
canie
32. Poda
ć
warunek wytrzymało
ś
ci elementu zginanego.
Gg < kg
Gg = Mg max / Wg < kg
kg - wytrzymało
ść
na zginanie
Mg max - maksymalny moment gn
ą
cy
Wg - wska
ź
nik wytrzymało
ś
ci na zginanie Wg = Iz/ h max
33. Poda
ć
wzór na całkowity k
ą
t skr
ę
cania pr
ę
ta, co to jest sztywno
ść
pr
ę
ta na skr
ę
canie?
Sztywno
ść
pr
ę
ta na skr
ę
canie to iloczyn modułu Kirchhoffa i momentu bezwładno
ś
ci na
skr
ę
canie.
34. Poda
ć
wzór opisuj
ą
cy krzywizn
ę
zgi
ę
tej belki, co to jest sztywno
ść
zginania?
Sztywno
ść
zginania to iloczyn modułu Younga i głównego centralnego momentu bezwładno
ś
ci
przekroju.
35. Poda
ć
definicj
ę
wska
ź
nika wytrzymało
ś
ci przy zginaniu oraz co ten wska
ź
nik
charakteryzuje?
Wska
ź
nik wytrzymało
ś
ci na zginanie (wska
ź
nik zginania) to iloraz (głównego centralnego)
momentu bezwładno
ś
ci przez maksymaln
ą
odległo
ść
skrajnych włókien.
36. Co to jest warstwa oboj
ę
tna belki?
Warstwa oboj
ę
tna belki jest to warstwa wewn
ą
trz materiału, która nie jest ani rozci
ą
gana ani
ś
ciskana. W prostych belkach warstwa oboj
ę
tna przechodzi przez
ś
rodki ci
ęż
ko
ś
ci przekrojów.
37. Poda
ć
posta
ć
uproszczonego równania ró
ż
niczkowego linii ugi
ę
cia belki.
Ely'' = - Mg = - Py
El - najmniejsza sztywno
ść
na zginanie
Mg, Py - moment zginaj
ą
cy
38. Co nazywamy wyboczeniem? Poda
ć
stany równowagi pr
ę
ta
ś
ciskanego.
Pr
ę
ty charakteryzuj
ą
ce si
ę
znaczn
ą
długo
ś
ci
ą
i małymi wymiarami poprzecznymi przy pewnej
warto
ś
ci siły
ś
ciskaj
ą
cej P trac
ą
stateczno
ść
, to znaczy wychylaj
ą
si
ę
z poło
ż
enia równowagi ,
zjawisko takie charakteryzuj
ą
ce si
ę
wygi
ę
ciem osi pr
ę
ta nosi nazw
ę
wyboczenia.
39. Podaj wzór na warto
ść
siły krytycznej Eulera oraz poda
ć
jej definicj
ę
.
Siła krytyczna Eulera - siła krytyczna w zakresie liniowo spr
ęż
ystym.
40. Poda
ć
posta
ć
ogólnego wzoru Eulera.
41. Poda
ć
warunek ograniczaj
ą
cy stosowanie wzoru Eulera.
Obliczenia za pomoc
ą
wzoru Eulera mo
ż
emy przeprowadzi
ć
tylko wtedy, gdy smukło
ść
pr
ę
ta jest
wi
ę
ksza od smukło
ś
ci granicznej.
42. Jak
ą
warto
ś
ci
ą
mierzone jest wyt
ęż
enie materiału? Co to jest napr
ęż
enie zredukowane?
Wyt
ęż
enie materiału to w wytrzymało
ś
ci materiałów stan materiału obci
ąż
onego siłami
zewn
ę
trznymi, w którym istnieje niebezpiecze
ń
stwo przej
ś
cia w stan plastyczny (przekroczenie
granicy spr
ęż
ysto
ś
ci). Wyt
ęż
enie materiału okre
ś
la si
ę
przez redukcj
ę
zło
ż
onego stanu
napr
ęż
enia do jednego napr
ęż
enia zredukowanego lub zast
ę
pczego. To napr
ęż
enie mo
ż
e by
ć
porównane z podstawowymi wytrzymało
ś
ciowymi stałymi materiałowymi wytrzymało
ś
ci
ą
na
rozci
ą
ganie Rm lub napr
ęż
eniem rozrywaj
ą
cym Ru, które uzyskuje si
ę
w czasie statycznej próby
rozci
ą
gania.
Napr
ęż
enie zredukowane to wyznaczane na podstawie hipotez wytrzymało
ś
ciowych napr
ęż
enie
zast
ę
puj
ą
ce działanie wszystkich napr
ęż
e
ń
składowych w obci
ąż
onym ciele.
43. Poda
ć
zale
ż
no
ść
na napr
ęż
enia zredukowane według hipotezy Hubera.
44. Omów hipotez
ę
Hubera.
Hipoteza głosz
ą
ca,
ż
e miar
ą
wyt
ęż
enia materiału w dowolnym punkcie obci
ąż
onego (siłami) ciała
spr
ęż
ystego jest ta cz
ęść
energii spr
ęż
ystej materiału, która jest zwi
ą
zana z odkształceniem
postaciowym - tylko ten rodzaj odkształcenia ma wpływ na osi
ą
gniecie stanu krytycznego, który w
przypadku materiałów ci
ą
gliwych objawia si
ę
powstaniem trwałych odkształce
ń
plastycznych,
natomiast w przypadku materiałów kruchych powoduje p
ę
kni
ę
cia. Pozostała cz
ęść
energii
spr
ęż
ystej zwi
ą
zana ze zmian
ą
obj
ę
to
ś
ci ciała nie ma wpływu na wyt
ęż
enie, gdy
ż
odkształcenie
czysto obj
ę
to
ś
ciowe jest praktycznie zupełnie spr
ęż
yste (nie narusza spójno
ś
ci materiałów).
Według hipotezy Hubera mo
ż
na obliczy
ć
napr
ęż
enie zredukowane dla dowolnego
trójwymiarowego stanu napr
ęż
enia.
45. Wymieni
ć
podstawowe przypadki wytrzymało
ś
ci zło
ż
onej.
- zginanie uko
ś
ne
- zginanie poł
ą
czone z rozci
ą
ganiem lub
ś
ciskaniem
- zginanie poł
ą
czone ze skr
ę
cananiem
- ogólny przypadek wytrzymało
ś
ci zło
ż
onej czyli poł
ą
czenie roci
ą
gania, zginania i skr
ę
cania
46. Poda
ć
wzory na moment zredukowany przy zginaniu ze skr
ę
caniem
a) wg hipotezy Hubera
b) wg hipotezy najwi
ę
kszych napr
ęż
e
ń
stycznych
47. Czym si
ę
zajmuje kinematyka? Podział kinematyki.
Kinematyka jest działem mechaniki zajmuj
ą
cym si
ę
badaniem ruchu ciał bez uwzgl
ę
dnienia sił
powoduj
ą
cych ten ruch.
Dzielimy j
ą
na :
- kinematyk
ę
punktu
- kinematyk
ę
ciała stałego
48.Wymieni
ć
sposoby opisania ruchu punktu.
1) przez podanie wektora - promienia wodz
ą
cego punkt ruchomy w funkcji czasu,
2) przez podanie współrz
ę
dnych kartezja
ń
skich jako funkcji czasu, czyli tak zwanych równa
ń
sko
ń
czonych ruchu,
3) przez podanie toru i współrz
ę
dnej krzywoliniowej wzdłu
ż
toru, okre
ś
laj
ą
cej sposób poruszania
si
ę
po torze,
4) przez podanie innych współrz
ę
dnych krzywoliniowych jako funkcji czasu np: biegunowych,
walcowych, sferycznych.
49. Przyspieszenie punktu w ruchu krzywoliniowym.
Ruch odbywaj
ą
cy si
ę
ze stał
ą
warto
ś
ci
ą
pr
ę
dko
ś
ci liniowej po dowolnej krzywej. Szczególnym
przypadkiem ruchu jednostajnego krzywoliniowego jest ruch jednostajny po okr
ę
gu.
50. Poda
ć
klasyfikacj
ę
ruchu punktu ze wzgl
ę
du na tor.
1. Ruchy prostoliniowe
2. Ruchy krzywoliniowe
- ruchy płaskie (na płaszczy
ź
nie)
- ruchy przestrzenne
51. Poda
ć
klasyfikacj
ę
ruchu punktu ze wzgl
ę
du na sposób poruszania si
ę
po torze.
- jednostajny
- jednostajnie zmienny
- ruch zmienny
- ruch okresowy
52. Poda
ć
klasyfikacj
ę
ruchów brył.
-post
ę
powy - dowolna prosta przeprowadzona przez brył
ę
sztywn
ą
przesuwa si
ę
równolegle do
samej siebie, wektory pr
ę
dko
ś
ci wszystkich punktów bryły sztywnej s
ą
w danej chwili jednakowe
-obrotowy - wszystkie punkty bryły sztywnej poruszaj
ą
si
ę
po okr
ę
gach, których
ś
rodki le
żą
na
jednej wspólnej prostej zwanej chwilow
ą
osi
ą
obrotu
- płaski
- kulisty
- dowolny
53. Zapisa
ć
zwi
ą
zek mi
ę
dzy pr
ę
dko
ś
ci
ą
obrotow
ą
, a pr
ę
dko
ś
ci
ą
k
ą
tow
ą
.
Dla n-tego punktu o wektorze wodz
ą
cym , relacja mi
ę
dzy pr
ę
dko
ś
ci
ą
liniow
ą
oraz
pr
ę
dko
ś
ci
ą
k
ą
tow
ą
(obrotow
ą
) jest opisana zwi
ą
zkiem:
54. Jak wyznaczamy przyspieszenie styczne i normalne punktów w ruchu obrotowym?
Przyspieszenie normalne (do
ś
rodkowe) to składowa przyspieszenia prostopadła do toru ruchu.
Reprezentuje t
ę
cz
ęść
przyspieszenia, która wpływa na kierunek pr
ę
dko
ś
ci, a zatem na kształt
toru. Je
ż
eli pr
ę
dko
ść
chwilowa oznaczona jest jako v, a promie
ń
chwilowego zakrzywienia toru
(promie
ń
okr
ę
gu stycznego do toru) ruchu wynosi r, to warto
ść
an przyspieszenia do
ś
rodkowego
ciała jest równa:
Przyspieszenie styczne to składowa przyspieszenia styczna do toru ruchu, wpływaj
ą
ca na
warto
ść
pr
ę
dko
ś
ci. Stosuj
ą
c oznaczenie v dla warto
ś
ci pr
ę
dko
ś
ci chwilowej i oznaczenie s dla
drogi pokonanej przez ciało, przyspieszenie styczne okre
ś
laj
ą
wzory:
55. Omówi
ć
własno
ś
ci przyspieszenia Coriolisa.
Przyspieszenie Coriolisa jest podwójnym iloczynem wektorowym pr
ę
dko
ś
ci k
ą
towej i pr
ę
dko
ś
ci
wzgl
ę
dnej. To przyspieszenie wyst
ę
puje w geometrycznej sumie przyspieszenia bezwzgl
ę
dnego
punktu.
56. Poda
ć
definicj
ę
ruchu płaskiego bryły.
Je
ż
eli wszystkie punktu bryły poruszaj
ą
si
ę
w płaszczyznach równoległych do pewnej
płaszczyzny nieruchomej, to ruch bryły jest ruchem płaskim.
57. Czym zajmuje si
ę
dynamika?
Dynamika jest działem mechaniki zajmuj
ą
ca si
ę
badaniem ruchu ciał pod wpływem działa sił.
Zajmuje si
ę
przyczynami i skutkami ruchów oraz ustala zale
ż
no
ść
mi
ę
dzy ruchem ciał a siłami
oddziałuj
ą
cymi na nie.
58. Poda
ć
definicj
ę
drugiego prawa Newtona.
Je
ś
li siły działaj
ą
ce na ciało nie równowa
żą
si
ę
(czyli siła wypadkowa jest ró
ż
na od zera), to ciało
porusza si
ę
z przyspieszeniem wprost proporcjonalnym do siły wypadkowej, a odwrotnie
proporcjonalnym do masy ciała.
n
r
r
n
v
r
ω
r
n
n
v
r
ω
= ×
r
r
r
59. Wymieni
ć
dwa podstawowe zadania dynamiki punktu (na czym polega rozwi
ą
zywanie
obu zada
ń
).
Zadania proste (pierwsze) - polega na wyznaczeniu sił działaj
ą
cych na punkt materialny, którego
ruch jest znany.
Zadania odwrotne (drugie) - polega na okre
ś
leniu ruchu punktu materialnego gdy znamy siły
działaj
ą
ce.
60. Zdefiniowa
ć
prac
ę
stałej siły na przesuni
ę
ciu prostoliniowym. Poda
ć
jednostk
ę
pracy.
Praca stała co do warto
ś
ci siły na przesuni
ę
ciu prostoliniowym jest to iloczyn skalarny wektora
siły i wektora przesuni
ę
cia punktu jej przyło
ż
enia. Jednostka pracy jest wat.
61. Poda
ć
definicj
ę
sprawno
ś
ci mechanicznej.
Sprawno
ść
mechaniczna (moc siły)
to praca odniesiona do jednostki czasu.
62. Poda
ć
wzór na energi
ę
kinetyczn
ą
ciała w ruchu post
ę
powym.
63. Poda
ć
wzór na energi
ę
kinetyczn
ą
ciała w ruchu obrotowym.
64. Co nazywamy energi
ą
mechaniczn
ą
. Jak brzmi zasada zachowania energii
mechanicznej.
Energi
ą
mechaniczn
ą
nazywamy geometryczn
ą
sum
ę
energii kinetycznej i potencjalnej.
Zasada zachowania energii mówi,
ż
e suma energii kinetycznej i potencjalnej w polu potencjalnym
jest wielko
ś
ci
ą
stał
ą
.
Wyszukiwarka
Podobne podstrony:
egz z mechaniki, geologia, IV rok - Hydrogeologia, Mechanika gruntów
egz mechanika
sciaga egz, Mechanika płynów rok 2
płyny-egz, Mechanika płynów rok 2
sem IV MG egz mechanika egz, UCZELNIA ARCHIWUM, UCZELNIA ARCHIWUM WGiG, WGiG Rok II sem IV (2012-201
Mechanika Semest I pytania egz
Egz mech 2(1), Studia, SiMR, II ROK, III semestr, Mechanika Ogólna II, Mechanika 2, Mechanika
Podaj wzr na maksymalny wskanik porowatoci, Prywatne, Budownictwo, Materiały, IV semestr, IV sem, Me
mechanika zadanka z tamtego roku egz
Pytania egz.MIUT stacjon.I st s.6 2014-15, Pytania z Mechanizacji … ZiIP s
wstep do zadan, BUDOWNICTWO polsl, sem IV, sem IV, Mechanika budowli, EGZ, egzam
Egz 2011, geologia, IV rok - Hydrogeologia, Mechanika gruntów
MECHANIKA EGZ
mechanika zad na egz, Teoria Kurnik
sprężarki automatyka, Akademia Morska -materiały mechaniczne, szkoła, GRZES SZKOLA, szkoła, automaty
mechanika gruntów egz
mechana egz sciaga
więcej podobnych podstron