
INSTYTUT MASZYN, NAPĘDÓW I POMIARÓW ELEKTRYCZNYCH
POLITECHNIKI WROCŁAWSKIEJ
MASZYNY ELEKTRYCZNE
Ćwiczenia laboratoryjne
Antal L., Janta T., Zieliński P

2
Spis treści
6 Metody pomiaru momentu obrotowego i mocy na wale maszyny ...................................... 21
3.7 Konstrukcyjne wyznaczenie charakterystyki zewnętrznej prądnicy samowzbudnej ...... 42

3
STRATY MOCY I SPRAWNOŚD SILNIKA BOCZNIKOWEGO PRĄDU STAŁEGO ...................................... 54
3.3 Pomiar strat mechanicznych w zależności od prędkości obrotowej .............................. 56
STRATY MOCY I SPRAWNOŚD PRĄDNICY BOCZNIKOWEJ PRĄDU STAŁEGO ..................................... 60

4
3.4 Pomiar charakterystyki n = f(U
) ..................................................................................... 74
3.3 Wyznaczenie charakterystyki symetrycznego zwarcia trójfazowego ustalonego .............. 81
3.5 Wyznaczenie zmienności napięcia i znamionowego prądu wzbudzenia ....................... 98



7

8
3.3 Pomiar prędkości obrotowej wyłączania uzwojenia rozruchowego ............................ 189
SILNIK KOMUTATOROWY PRĄDU PRZEMIENNEGO TYPU SCHRAGE–RICHTERA ............................ 208

9
BADANIE PRZESUWNIKA FAZOWEGO I REGULATORA INDUKCYJNEGO.......................................... 217

10
WSTĘP
1
Badanie maszyn elektrycznych
Wymagania techniczne stawiane maszynom elektrycznym mające na celu zapewnienie ich
niezawodności, obniżenie kosztów produkcji i eksploatacji oraz bezpieczeostwo pracy wiążą się z
koniecznością wykonania wielu badao podczas ich projektowania, produkcji i eksploatacji. Badania te
wykonuje się zarówno na gotowych maszynach, jak i na materiałach i podzespołach przeznaczonych
do budowy maszyn.
Podczas produkcji wykonywane są badania, które mają stwierdzid, czy jakośd poszczególnych
elementów i zespołów zapewni ich nienaganną współpracę w gotowej maszynie. Są to tzw. próby
międzyoperacyjne umożliwiające wprowadzanie do procesu produkcji ewentualnych poprawek.
Każdy wyrób podlega badaniom niepełnym, których zakres określa POLSKIE CENTRUM BADAO
I CERTYFIKACJI (PCBC).
Nowo wyprodukowana maszyna przechodzi w zakładzie produkcyjnym próby wyrobu lub typu oraz
próby zdawczo-odbiorcze. Przed wprowadzeniem jej do sprzedaży, maszyna musi uzyskad w PCBC
świadectwo zgodności ze znakiem bezpieczeostwa „B”. Świadectwo takie wydane jest przez
akredytowane przez PCBC laboratoria badawcze na podstawie wyników badao i oceny ich zgodności
z normami. Zakres przeprowadzanych badao jest ściśle określony dla poszczególnych typów wyrobów
w „kryteriach technicznych oceny na znak bezpieczeostwa” wydawanych przez PCBC. Znak „B”
przyznawany jest na 3 lata. W przypadku nowo wprowadzanych wyrobów zakres badao obejmuje
badania pełne. Po każdych 3 latach produkcji wymagane jest przeprowadzenie badao kontrolnych.
Próby pełne mają bardzo szeroki program badao, dlatego poddawane są im tylko maszyny o nowej
konstrukcji lub maszyny, w których dokonano istotnych zmian w konstrukcji lub technologii produkcji
mogących wpływad na własności ruchowe maszyny. W produkcji wielkoseryjnej próby pełne
wykonuje się również co pewien czas na wyrywkowo wybranych egzemplarzach maszyn. Ponieważ
koszt prób pełnych jest znaczny, każda nowo wyprodukowana maszyna przechodzi badania skrócone
(próba niepełna). Zakres tych prób określają normy. Celem ich jest stwierdzenie, czy maszyna
odpowiada wymaganiom obowiązujących norm i przepisów.
Dla dużych maszyn, wykonuje się również próby zdawczo-odbiorcze. Ich zakres jest określony
porozumieniem między producentem i odbiorcą. Niejednokrotnie próby te odbywają się w miejscu
stałej pracy maszyny. Dotyczy to przede wszystkim dużych maszyn, które są transportowane w
częściach albo gdy wykonanie pełnego programu prób zdawczo-odbiorczych na terenie zakładu
produkującego nie jest możliwe.
W czasie eksploatacji maszyn są wykonywane tzw. próby profilaktyczne. Odbywają się one co
pewien, ściśle określony, czas. Próby profilaktyczne dostarczają informacji o przebiegu procesu
„starzenia się” maszyny. Wyniki jednorazowo wykonanych badao informują jedynie o tym, czy w
danej chwili stan techniczny maszyny jest odpowiedni. Na podstawie wyników pomiarów z kolejnych
badao analizowanych łącznie można ustalid długośd okresu dalszej bezawaryjnej pracy oraz
racjonalnie planowad terminy remontów maszyn.

11
Wszystkie rodzaje badao maszyn umożliwiają ocenę stanu maszyny.
Dwiczenia w laboratorium maszyn elektrycznych, ze względu na rolę jaką mają odegrad oraz
ograniczony czas trwania zajęd, nie mogą swym programem obejmowad wszystkich rodzajów badao.
Ich głównym celem jest pogłębienie i ugruntowanie zdobytych wiadomości o maszynach
elektrycznych, ogólne zapoznanie studentów z techniką wykonywania pomiarów oraz nauczenie ich
wnioskowania o własnościach maszyny na podstawie analizy zmierzonych parametrów i
charakterystyk. Badania wchodzące w skład poszczególnych dwiczeo są w zasadzie wycinkami prób
przewidzianych przez normy. Programy dwiczeo są często tak ułożone, aby dwiczący mogli nie tylko
stwierdzid poprawnośd konstrukcji czy wykonania konkretnego egzemplarza maszyny, lecz przede
wszystkim, aby nauczyli się stosowad poznane metody analizy do rozwiązywania zagadnieo
związanych z badaniem zjawisk występujących w poszczególnych rodzajach maszyn elektrycznych
oraz aby poznali wpływ poszczególnych parametrów na własności eksploatacyjne charakterystyczne
dla danego rodzaju maszyny.
2
Metodyka wykonywania pomiarów
Przed przystąpieniem do dwiczenia należy opanowad podstawowy materiał teoretyczny do danego
dwiczenia zamieszczony w skrypcie i literaturze uzupełniającej, oraz wiadomości zawarte rozdziale
„Pomiary ogólne maszyn elektrycznych”. Właściwe przygotowanie pozwala odpowiedzied na pytania:
czym jest badany obiekt?
jaki jest cel wykonywania badao?
jakimi środkami cel ten można osiągnąd?
Każda dwicząca grupa laboratoryjna ustala w swym składzie:
kierującego dwiczeniem,
protokołującego pomiary.
Funkcje te w poszczególnych dwiczeniach pełnią kolejno wszyscy członkowie grupy. Przed
rozpoczęciem dwiczenia grupa przedstawia prowadzącemu plan badao. Kolejnośd poszczególnych
pomiarów ustala się według zasady:
w pierwszej kolejności przystępuje się do tych pomiarów, które powinny byd wykonane na
maszynie nie nagrzanej oraz tych, których wyniki są niezbędne do dalszych badao,
pozostałe pomiary wykonuje się w takiej kolejności, aby liczba zmian połączeo układu była jak
najmniejsza.
Budując układ pomiarowy, przy kompletowaniu przyrządów pomiarowych trzeba zwracad uwagę na
dobranie odpowiednich zakresów pomiarowych i klas. Przy dobieraniu aparatury regulacyjnej i
przewodów łączących należy uwzględniad ich dopuszczalne obciążenie prądowe. Aby uniknąd
pomyłek w montażu układu pomiarowego, należy przestrzegad następującej zasady: w pierwszej
kolejności łączyd obwody, w których płynie prąd roboczy, a następnie dopiero obwody pomiarowe:
prądowy i następnie napięciowy. Należy również zwracad uwagę na właściwe dokręcanie zacisków.
Złe zestyki mogą zmniejszad dokładnośd pomiarów oraz byd przyczyną uszkodzenia przyrządów,
zward w obwodzie, rozbiegania się maszyny itp. Wszystkie regulatory oraz przyrządy znajdujące się w
układzie pomiarowym należy przed każdym włączeniem napięcia do układu, ustawid w położeniu
rozruchowym.
Po zmontowaniu i sprawdzeniu układu przez dwiczących należy układ zgłosid do sprawdzenia
prowadzącemu dwiczenie. Po uzyskaniu zezwolenia grupa przystępuje do wykonywania pomiarów

12
przewidzianych szczegółowym programem, postępując zgodnie z obowiązującymi regulaminami i
instrukcjami.
Najczęściej pomiary polegają na wyznaczeniu zależności między dwiema wielkościami w ściśle
określonych warunkach, charakteryzujących stan pracy maszyny. Przez cały czas pomiarów należy
ściśle przestrzegad tych warunków, a w razie niemożności ich dotrzymania należy ten fakt
odnotowad, a wyniki pomiarów odpowiednio przeliczyd.
Wszystkie wielkości stałe (np. napięcie) powinny byd odnotowywane w protokole pomiarów przy
każdym pomiarze, w celu ustalenia w jakim stopniu zadany warunek jest spełniony.
Liczbę punktów pomiarowych, potrzebnych do wystarczająco dokładnego odtworzenia wyznaczanej
charakterystyki, ustala się na podstawie jej teoretycznego przebiegu. Należy przy tym zwracad uwagę
na odpowiednią gęstośd punktów pomiarowych. Powinna ona byd tym większa, im bardziej
wyznaczany odcinek charakterystyki jest nieregularny lub odbiega od przewidywanego przebiegu. W
dwiczeniach można przyjąd za minimalną ilośd 6 punktów pomiarowych. Wyniki pomiarów
odnotowuje się w wcześniej przygotowanym protokole. Powinny znaleźd się w nim następujące
pozycje:
skład grupy wraz z podziałem funkcji (kierujący dwiczeniem, protokołujący),
tytuł i numer dwiczenia,
przedmiot badao (dane znamionowe i opis badanej maszyny),
schematy układów pomiarowych,
spis przyrządów mających wpływ na wynik pomiarów,
wyniki pomiarów zamieszczone w tabelach,
uwagi o pomiarach.
Tabele pomiarowe zamieszczone w protokole, przygotowuje się na podstawie tabel zamieszczonych
w skrypcie, z tym że dla każdej wielkości mierzonej przeznacza się trzy kolumny, z których pierwsza
zawiera wskazania przyrządu w działkach, druga stałą przyrządu i przekładnię przekładnika zapisane
ułamkiem, a trzecia obliczoną wartośd wielkości mierzonej. Odczyty z przyrządów wykonuje się z
dokładnością wynikającą z klasy przyrządu, czyli z ułamkami działek jeśli klasa na to pozwala.
3
Opracowanie wyników pomiarów
Protokół z pomiarów, zatwierdzony przez prowadzącego dwiczenie, jest podstawą do opracowania
sprawozdania z dwiczenia. Sprawozdanie powinno zawierad, oprócz punktów wchodzących w skład
protokołu, przykładowe obliczenia, charakterystyki oraz opracowane na ich podstawie wnioski.
Wykresy charakterystyk należy rysowad komputerowo lub na papierze milimetrowym, wyraźnie
zaznaczając punkty pomiarowe i interpolując przebieg krzywej między punktami. Jeżeli stosowane
metody pomiarowe nie pozwalają na wyznaczenie całego zakresu szukanej zależności, to jedynie
znajomośd teoretycznego przebiegu danej funkcji pozwoli wykonad prawidłową interpolację bądź
ekstrapolację. Znajomośd teoretycznego przebiegu umożliwia również prawidłowe wykreślenie
charakterystyki w przypadku dużego rozrzutu wyników pomiarów.
Aby porównad właściwości maszyn o różnych danych znamionowych, podstawowe wielkości
charakteryzujące pracę maszyn można wyrażad w jednostkach względnych. Jednostki względne są
liczbami niemianowanymi, określającymi ile razy wartośd danej wielkości fizycznej jest większa od

13
wartości przyjętej za podstawę odniesienia. Za podstawowe wartości odniesienia zwykle przyjmuje
się:
napięcie znamionowe U
n
,
prąd znamionowy I
n
,
moc znamionową P
n
,
znamionowy prąd wzbudzenia I
fo
(dający przy biegu jałowym i znamionowej prędkości obrotowej
napięcie znamionowe),
znamionową prędkośd obrotową n
n
.
Pozostałe wartości odniesienia wypływają z wcześniej przyjętych wartości, np. rezystancja
znamionowa R
n
= U
n
/ I
n
.
Wnioski z pomiarów powinny ściśle nawiązywad do celu pomiarów. Wyniki należy porównad z
wymaganiami norm oraz zadecydowad o przydatności danej maszyny do pracy w określonych
warunkach.
Sprawozdania powinny mied jednolitą formę. Sporządza się je według następujących punktów:
temat dwiczenia,
przedmiot badao,
spis przyrządów,
program badao,
krótki opis metod pomiarowych, jeżeli odbiegają od opisanych w skrypcie,
schematy pomiarowe,
tabele z wynikami pomiarów i obliczeo,
zastosowane wzory i przykłady obliczeo,
wykresy charakterystyk,
uwagi i wnioski.
14
POMIARY OGÓLNE MASZYN ELEKTRYCZNYCH
1
Pomiary rezystancji uzwojeń
1.1
Uwagi ogólne
We wszystkich próbach maszyn elektrycznych wykonuje się pomiar rezystancji uzwojeo w stanie
zimnym, tzn. gdy temperatura danego uzwojenia nie różni się od temperatury chłodziwa więcej niż
±3 deg . W przypadku małych maszyn za temperaturę stanu zimnego przyjmuje się temperaturę
otoczenia, w maszynach dużych temperaturę stanu zimnego mierzy się termometrami
umieszczonymi wewnątrz maszyny na 0,5 do 1 h przed rozpoczęciem pomiarów. Ponieważ zmierzona
rezystancja zwykle służy do dalszych obliczeo i badao, pomiary jej powinny byd wykonane szczególnie
starannie. Najczęściej stosowanymi sposobami pomiaru rezystancji są:
metody mostkowe,
metoda „techniczna” (woltomierza i amperomierza).
Do najbardziej rozpowszechnionych metod mostkowych należy pomiar rezystancji małych (poniżej
10 ) mostkiem Thomsona oraz rezystancji większych - mostkiem Wheatstone’a. Pomiary mostkowe
są bardzo dokładne, pod warunkiem, że mostki są zestawione z elementów wysokiej klasy, co w
warunkach przemysłowych jest często trudne do zrealizowania. Dlatego najczęściej stosowaną
metodą pomiaru rezystancji uzwojeo maszyn elektrycznych jest metoda „woltomierza” i
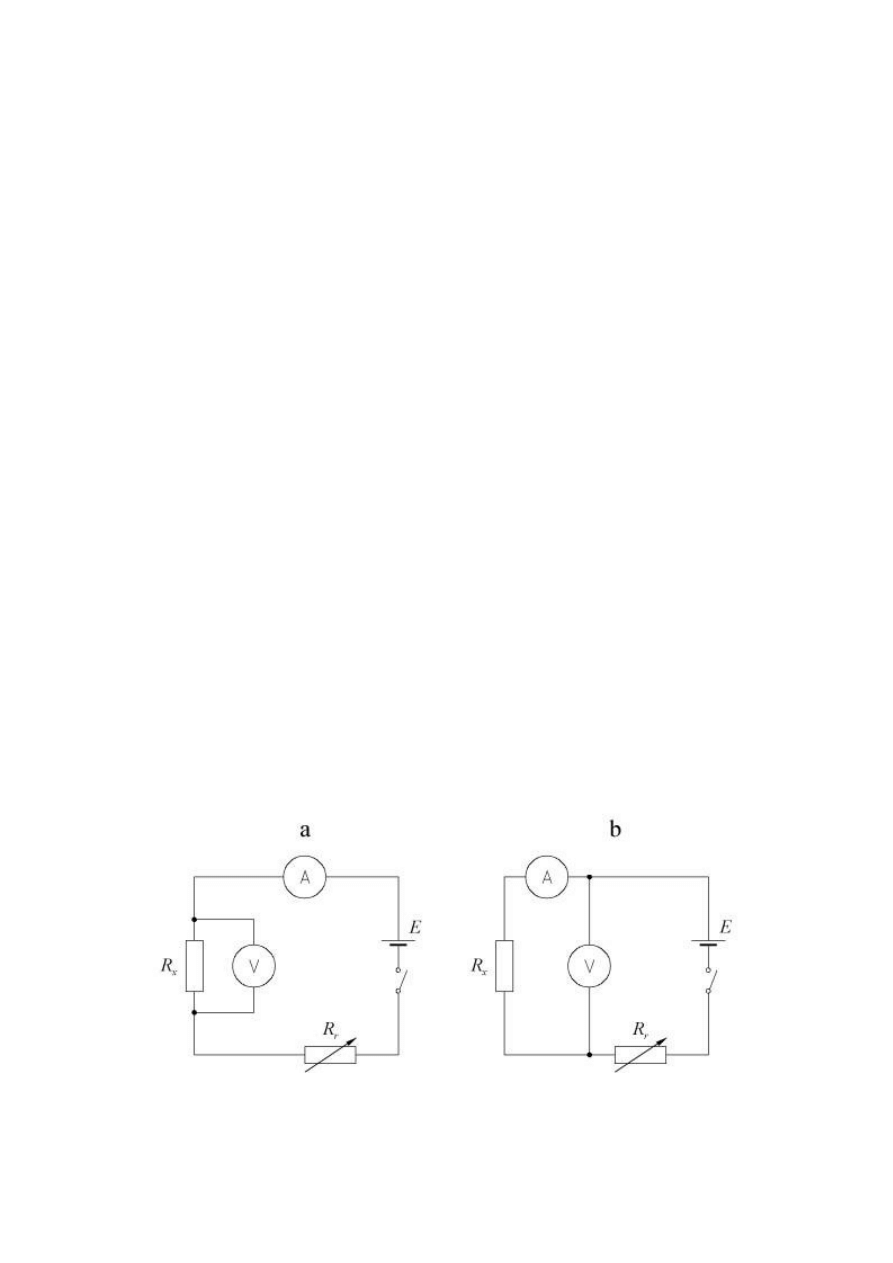
„amperomierza”. Jej dokładnośd zależy od dokładności użytych do pomiaru przyrządów. W zależności
od sposobu połączenia przyrządów rozróżnia się układ do pomiaru rezystancji „małych” (rys. 2.1a)
oraz rezystancji „dużych” (rys. 2.1b).
Rezystancje uzwojeo wirników, w obwodzie których znajdują się zestyki ślizgowe należy mierzyd
bezpośrednio na działkach komutatora lub pierścieniach ślizgowych.
Zastosowanie odpowiedniego układu pomiarowego bardzo często pozwala nie uwzględniad
poprawek. Poprawki należy uwzględniad wtedy, gdy wartośd błędu popełnionego w niedokładnym
pomiarze prądu czy napięcia powoduje dostrzegalną zmianę we wskazaniu odpowiedniego
przyrządu.
Rys. 2.1. Układ do pomiaru rezystancji: a - małych, b – dużych
15
Należy zaznaczyd, że za rezystancję „małą” uważa się rezystancję znacznie mniejszą od rezystancji
wewnętrznej użytego woltomierza, rezystancja „duża” natomiast to rezystancja znacznie większa od
rezystancji zastępczej amperomierza i bocznika.
Źródłem zasilania powinna byd bateria akumulatorów o pojemności zapewniającej stałośd prądu w
czasie pomiarów.
Wartośd natężenia prądu płynącego przez rezystancję mierzoną należy dobrad tak, aby praktycznie
nie powodowała nagrzania się uzwojeo. Również z tego powodu pomiary rezystancji należy
wykonywad możliwie szybko.
Zmieniając wartości natężenia prądu, odczytuje się jednocześnie wskazania obydwu przyrządów.
Rezystancję oblicza się według wzoru
(2.1)
a gdy trzeba uwzględnid poprawkę, według wzoru
–
dla układu z rys. 2.la
(2.2)
–
dla układu z rys. 2.1b
(2.3)
przy czym: I - prąd zmierzony amperomierzem,
U - napięcie zmierzone woltomierzem,
R
v
- rezystancja wewnętrzna woltomierza,
R
a
- rezystancja wewnętrzna amperomierza wraz z ewentualnym bocznikiem.
16
1.2
Pomiar rezystancji uzwojeń maszyn prądu stałego
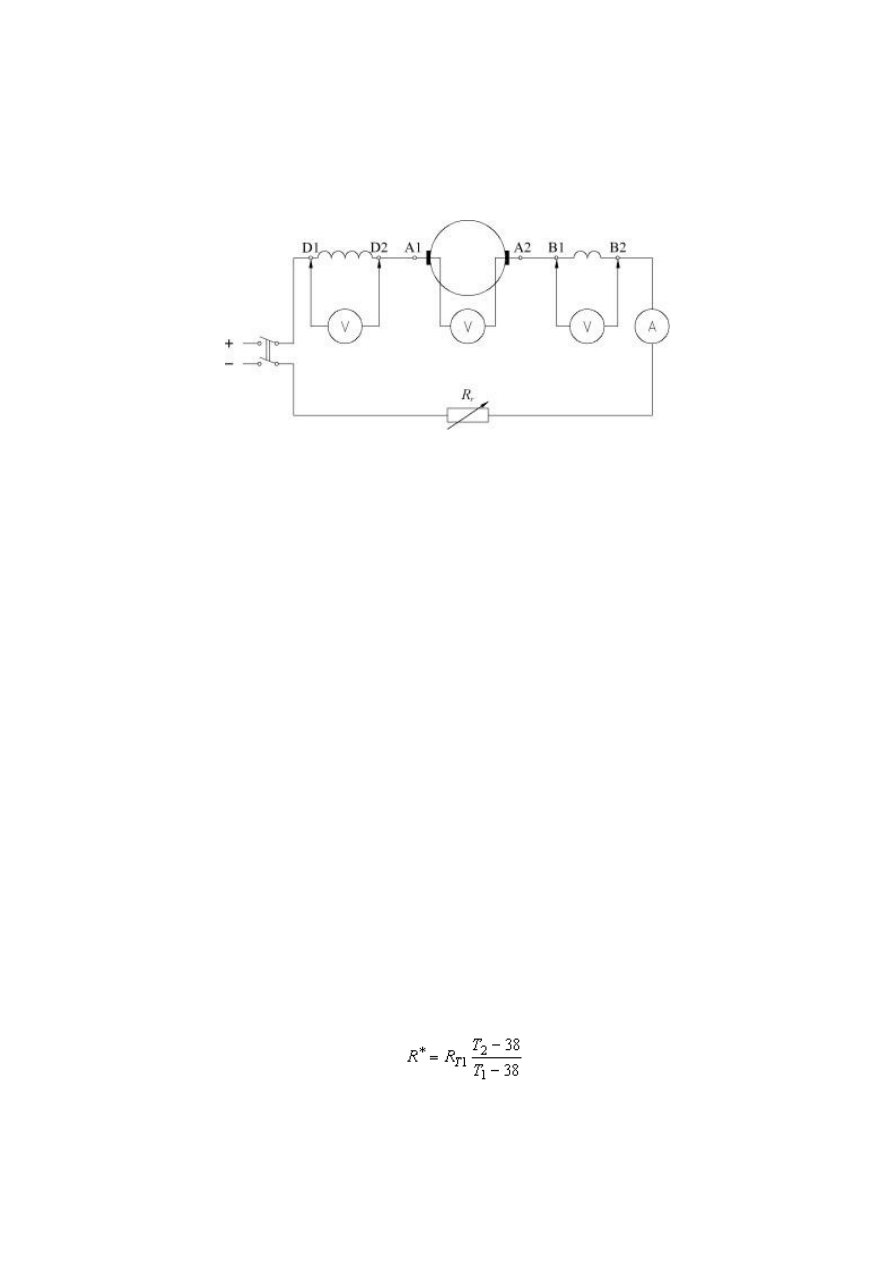
Pomiar rezystancji uzwojeo twornika, biegunów pomocniczych, uzwojeo kompensacyjnych i uzwojeo
szeregowych wykonuje się w układzie przedstawionym na rys.2.2.
Rys. 2.2. Pomiar rezystancji uzwojenia twornika
Ze względu na nagrzewanie się uzwojeo prąd podczas pomiaru nie powinien przekraczad 25% prądu
znamionowego tych uzwojeo. Jeżeli konieczne jest stosowanie prądów o większych wartościach
natężenia, należy odpowiednio skrócid czas pomiarów.
Mierząc rezystancję uzwojeo twornika w maszynie zmontowanej, należy zwrócid uwagę na
prawidłowe przyłączenie woltomierza. Koocówki przewodów od woltomierza powinny byd
przyłożone bezpośrednio do działek komutatora, leżących pod różnobiegunowymi szczotkami
maszyny, przy czym wszystkie szczotki powinny przylegad do komutatora. Nie należy przyłączad
woltomierza do szczotek. Pomiar wykonuje się dla trzech różnych położeo twornika i oblicza wartośd
średnią.
Rezystancję uzwojenia bocznikowego mierzy się, w zależności od jej szacunkowej wartości, w
układzie dokładnego pomiaru napięcia (rys. 2.1a) lub dokładnego pomiaru prądu (rys. 2.1b). Często
do dalszych obliczeo potrzebna jest wartośd rezystancji uzwojeo w temperaturze pracy. Ponieważ
pomiar rzeczywisty temperatury pracy uzwojeo jest dośd kłopotliwy, zgodnie z normą „jeżeli
temperatura koocowa uzwojeo maszyny nie została określona w wyniku pomiaru, rezystancję
zmierzoną w stanie zimnym przelicza się na pewną umowną temperaturę odniesienia”. Temperatura
ta wynosi:
347K (75°C) – dla klas izolacji uzwojeo A, B, E,
387K (115°C) – dla klas izolacji uzwojeo F i H.
Jeśli uzwojenia wykonane są z miedzi, rezystancję przelicza się zgodnie ze wzorem
(2.4)
a jeśli są aluminiowe, wzorem
17
(2.5)
przy czym: T
1
– temperatura stanu zimnego (w K),
T
2
– temperatura odniesienia (w K),
R
T1
– rezystancja uzwojenia w temperaturze stanu zimnego (w ),
R
*
– rezystancja uzwojenia w temperaturze odniesienia (w ).
Tabela 2.1
Temperatura ...
Lp.
R
A1A2
R
B1B2
R
D1D2
I
U/R
v
U
R
R
śr
I
U/R
v
U
R
R
śr
I
U/R
v
U
R
R
śr
A
V
A
V
A
V
2
Spadek napięcia na szczotkach
Rezystancja szczotek oraz rezystancja przejścia między szczotką a komutatorem jest nieliniowa.
Zależy ona od wartości natężenia przepływającego prądu, prędkości obrotowej komutatora,
biegunowości szczotki, siły nacisku, rodzaju materiału szczotki i komutatora. Charakterystyczne
wielkości dla różnych typów szczotek są podawane w katalogach wytwórców.
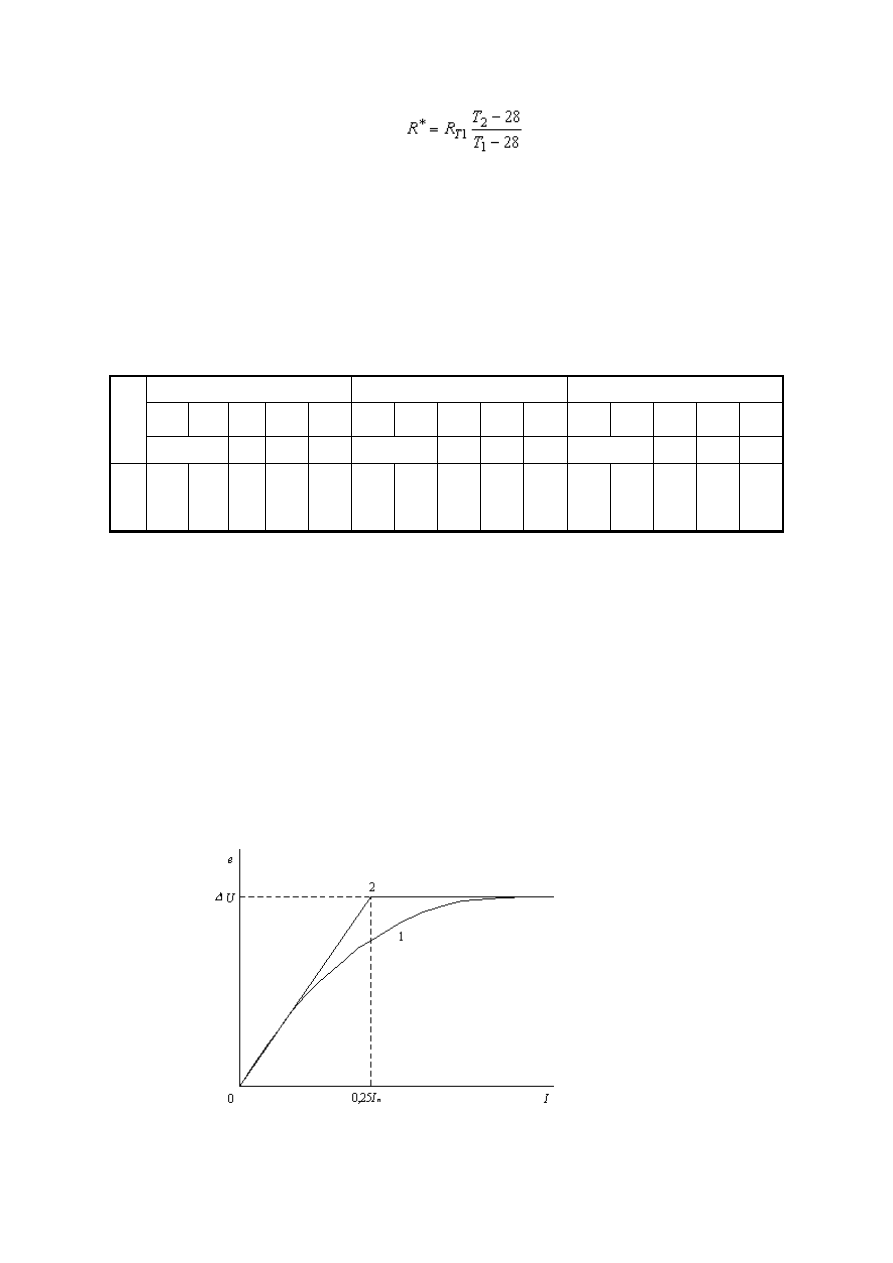
W praktyce nie określa się rezystancji przejścia, lecz spadek napięcia e
sz
na tej rezystancji.
Szacunkowo przyjmuje się, że spadek ten dla pary szczotek zmienia się według krzywej 1 (rys. 2.3). W
praktyce spadek napięcia na rezystancji przejścia szacujemy na podstawie uproszczonego wykresu
(krzywa 2).
Rys. 2.3. Spadek napięcia na szczotkach
18
3
Pomiary prędkości obrotowej
Prędkośd obrotową najczęściej się mierzy:
obrotomierzem (tachometrem) odśrodkowym,
prądnicą tachometryczną,
tachometrem stroboskopowym,
tachometrem cyfrowym.
Obrotomierz odśrodkowy działa na podobnej zasadzie jak powszechnie znany odśrodkowy regulator
prędkości obrotowej. Tachometr sprzęga się z wałem badanej maszyny za pomocą sprzęgiełka. Łatwo
zmieniane przekładnie zębate, w które jest zaopatrzony tachometr, pozwalają na uzyskanie bardzo
dużego zakresu pomiarowego. Przyrząd ten służy do pomiaru prędkości obrotowej w stanie
ustalonym.
Prądnica tachometryczna jest to zwykle jednofazowa prądnica synchroniczna z wirującymi
magnesami trwałymi. Strumieo magnetyczny ma zatem wartośd stałą. Wartośd indukowanej siły
elektromotorycznej w uzwojeniu twornika prądnicy jest więc proporcjonalna tylko do prędkości
obrotowej
(2.6)
Mierząc napięcie na zaciskach prądnicy, jednocześnie mierzy się prędkośd obrotową sprzęgniętej z
nią maszyny. Zwykle woltomierz stanowi komplet z prądnicą i jest wywzorcowany w obrotach na
minutę. Metodę tę można stosowad do pomiarów prędkości obrotowej zarówno w stanie ustalonym,
jak i nieustalonym.
Wymienione metody pomiaru prędkości obrotowej mają te wadę, że podczas pomiaru badana
maszyna jest obciążona dodatkowym momentem hamującym (tachometrem). Jeśli badane są
mikromaszyny lub maszyny o ułamkowej mocy, to moment ten jest dla nich za dużym obciążeniem
i tym samym uniemożliwia pomiary. Wady tej nie ma metoda pomiaru prędkości obrotowej za
pomocą tachometru stroboskopowego.
Tachometr stroboskopowy jest przyrządem, którego głównym elementem jest lampa błyskowa o
regulowanej liczbie błysków w jednostce czasu. Regulacja ta odbywa się płynnie przez przestrajanie
elektronicznego generatora impulsów zapłonowych. Oświetlając stroboskopem wirujący wał
maszyny, na którym uprzednio narysowano promieniową kreskę, tak regulujemy częstośd błysków
lampy aż uzyskamy pozornie nieruchomy obraz narysowanej kreski. Oznacza to, że częstośd błysków
lampy stroboskopowej, mierzona np. w liczbie błysków na sekundę, jest równa prędkości obrotowej
wału w obrotach na sekundę. Wartośd tę można odczytad bezpośrednio ze skali przyrządu. Gdy
zamiast jednej nieruchomej kreski na wale maszyny zaobserwuje się ich 2, 3, 4 itd., oznacza to, że
częstośd błysków lampy stroboskopowej jest większa odpowiednio 2, 3, 4 razy. Wadą tej metody jest
to, że nadaje się ona do pomiarów prędkości obrotowej tylko w stanie ustalonym. Dokładnośd jej
pomiaru wynosi około 3% i zależy od klasy dokładności generatora impulsów zapłonowych.
Bardzo dużą dokładnośd pomiaru prędkości obrotowej gwarantuje tachometr cyfrowy. Zasada jego
działania polega na zliczeniu liczby impulsów elektrycznych przypadających na jednostkę czasu. Liczba
impulsów musi byd proporcjonalna do liczby obrotów. W tym celu na wale badanej maszyny
19
umieszcza się specjalną tarczę z otworkami rozmieszczonymi symetrycznie na okręgu. Z jednej strony
tarczy znajduje się źródło światła, a z drugiej przetwornik fotoelektryczny. Tarcza wirując powoduje
okresowe oświetlenie przetwornika, który impulsy świetlne zamienia na impulsy elektryczne.
Następnie, po odpowiednim uformowaniu, impulsy elektryczne są podawane na licznik tachometru.
Wynik pomiaru odczytuje się bezpośrednio z ekranu tachometru. Dokładnośd tego typu tachometru
jest bardzo duża, wynosi ona 0,1%.
4
Pomiar poślizgu
Definicję poślizgu przedstawia wzór
(2.7)
w którym:
n
1
– prędkośd obrotowa wirującego pola magnetycznego,
n – prędkośd obrotowa wirnika.
W zależności od wartości obciążenia poślizg maszyn indukcyjnych w ustalonych stanach pracy
zmienia się w przedziale wartości od 0,005 do 0,1. Zatem wartości n
1
i n są często bardzo sobie
bliskie. W takich wypadkach nie można wyznaczad różnicy n
1
– n przez oddzielny pomiar tych
wielkości, gdyż nawet niewielkie błędy w pomiarze n
1
i n (rzędu jednego procentu) będą powodowad
błędy wartości poślizgu sięgające kilkuset procent. Określenie poślizgu silnika według wzoru (2.7)
musi więc polegad na bezpośrednim wyznaczeniu różnicy n
1
– n. Wyjątkiem jest pomiar prędkości
obrotowej tachometrem cyfrowym, którego duża dokładnośd eliminuje możliwośd powstania dużego
błędu wyznaczanego poślizgu.
5
Pomiar częstotliwości prądu wirnika
Częstotliwości prądu stojana f
1
i wirnika f
2
w maszynach asynchronicznych są związane zależnością
(2.8)
Dla znanej zazwyczaj częstotliwości f
1
wyznaczenie częstotliwości f
2
jest jednoznaczne z
określeniem poślizgu s.
20
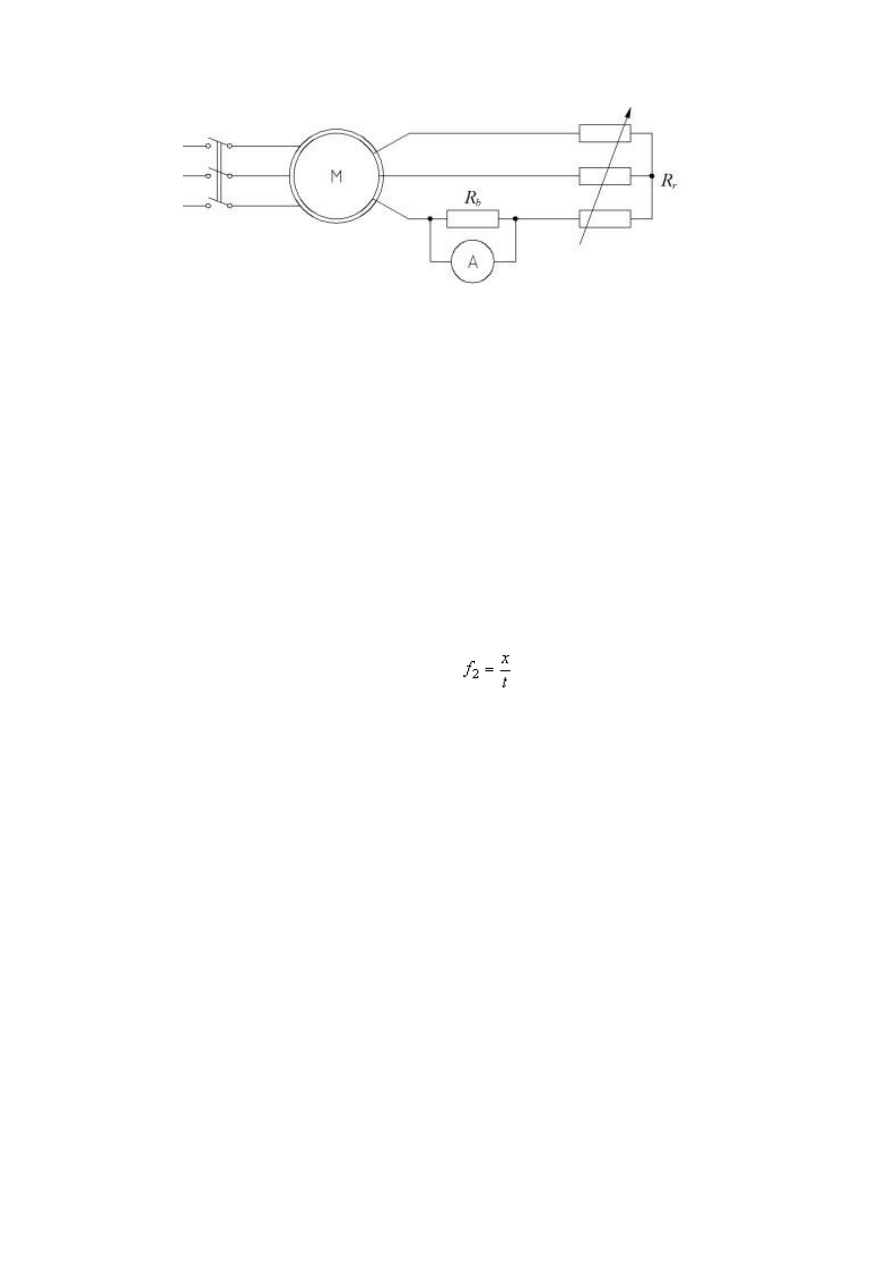
Rys. 2.4. Pomiar częstotliwości prądu wirnika
W celu pomiaru częstotliwości f
2
w silnikach pierścieniowych należy włączyd w obwód wirnika
amperomierz magnetoelektryczny z zerem pośrodku skali, bocznikowany rezystancją R
b
(rys. 2.4).
Ponieważ częstotliwośd prądów wirnika jest niewielka (0,025 - 5Hz), wskazówka amperomierza
magnetoelektrycznego będzie się wahad wokół położenia zerowego, przy czym czas jednego pełnego
wychylenia odpowiada jednemu cyklowi. Mierzy się czas trwania od kilku do kilkudziesięciu cykli, tak
by niezależnie od wartości mierzonej częstotliwości czas pomiaru wynosił około 30s. Taki tok
postępowania gwarantuje wystarczającą dokładnośd, nawet wtedy, gdy czas jest mierzony zwykłym
zegarkiem z centralnym sekundomierzem. W takim wypadku pomiar muszą wykonywad dwie osoby.
Pomiar częstotliwości można również zrealizowad przez pomiar spadku napięcia na jednym z
przewodów zwierających uzwojenie wirnika.
Na podstawie otrzymanych wyników
(2.9)
przy czym: x - liczba pełnych wychyleo wskazówki w czasie t.
Rezystancja R
b
bocznikująca amperomierz w czasie rozruchu silnika powinna byd ustawiana na
wartośd R = 0. Po rozruchu rezystancję należy zwiększad aż do wystąpienia wyraźnych wahao
wskazówki. Nie należy jednak zbytnio zmniejszad zakresu pomiarowego amperomierza, gdyż wskutek
inercji jego organu ruchomego amplituda wychyleo wskazówki, zwłaszcza dla większych
częstotliwości, jest znacznie mniejsza niż wynikałoby to z wartości natężenia prądu płynącego przez
przyrząd. Może to doprowadzid do jego uszkodzenia.
5.1
Metoda stroboskopowa
Wał maszyny, na którym - podobnie jak w przypadku pomiaru prędkości obrotowej stroboskopem -
jest narysowana biała kreska, oświetla się lampą neonową zasilaną napięciem o częstotliwości takiej
samej jak częstotliwośd napięcia zasilającego. Ponieważ prędkośd obrotowa wału jest mniejsza niż
prędkośd synchroniczna, więc obraz gwiazdy, o liczbie ramion zależnej od liczby par biegunów silnika,
będzie wirował w kierunku przeciwnym do kierunku wirowania wału. Wyznaczając liczbę pełnych
obrotów gwiazdy przypadających na jednostkę czasu, znajduje się częstotliwośd f
2
.
21
Najczęściej jako lampy neonowej używa się lampy tachometru stroboskopowego, którego
częstotliwośd błysków jest synchronizowana z częstotliwością sieci (wykonania tachometrów
przewidują taką możliwośd). Błyski tachometru mają krótki czas trwania oraz dużą moc, co powoduje,
że obraz gwiazdy jest bardzo wyraźny.
6
Metody pomiaru momentu obrotowego i mocy na wale maszyny
6.1
Uwagi ogólne
W większości maszyn elektrycznych następuje zamiana energii elektrycznej na mechaniczną (silniki)
lub mechanicznej na elektryczną (prądnice). Toteż podczas ich badao często jest niezbędny pomiar
mocy mechanicznej dostarczanej bądź odbieranej z maszyny za pośrednictwem wału. Koniecznośd
taka występuje zwłaszcza podczas wyznaczania sprawności maszyn oraz w wypadku silników – w
czasie wyznaczania ich charakterystyk mechanicznych.
Metody wyznaczania mocy lub momentu na wale maszyny można podzielid na:
bezpośrednie,
pośrednie,
mieszane (metoda prądnicy hamulcowej).
Metody bezpośrednie polegają na bezpośrednim pomiarze momentu obrotowego M na wale
maszyny oraz prędkości obrotowej n. Szukana moc mechaniczna
(2.10)
przy czym: P – moc na wale (w W),
M – moment obrotowy (w N·m),
n – prędkośd obrotowa (w obr/s).
Prędkośd obrotową mierzy się dowolną z metod omówionych w p. 3. Moment obrotowy natomiast
mierzy się za pomocą urządzenia zwanego hamulcem pomiarowym .
Metoda pośrednia polega na pomiarze mocy elektrycznej P
el
na zaciskach badanej maszyny oraz
wyznaczeniu strat mocy traconej w maszynie P. Szukana moc na wale P
mech
wynosi
dla silników
(2.11)
dla prądnic
(2.12)
Wartośd momentu może byd obliczona według wzoru
22
(2.13)
Ponieważ metody te są tematem niektórych dwiczeo laboratoryjnych, nie będą tu dokładniej
omawiane.
Metoda łącząca elementy obydwóch omówionych metod nazywa się metodą prądnicy hamulcowej.
Polega ona na tym, że jako hamulca używa się prądnicy (najczęściej prądu stałego, bocznikowej lub
obcowzbudnej), dla której znana jest zależnośd mocy na wale P
mech
lub sprawności od mocy
elektrycznej oddawanej z zacisków P
el
(P
mech
;
= f(P
el
)).
Badany silnik napędza prądnicę hamulcową, która po wzbudzeniu może byd obciążona i oddawad
moc np. na odbiornik o regulowanej rezystancji. Dla zmierzonej mocy na zaciskach maszyny
hamulcowej z wykresu znajduje się odpowiadającą jej sprawnośd, co pozwala dla znanej prędkości
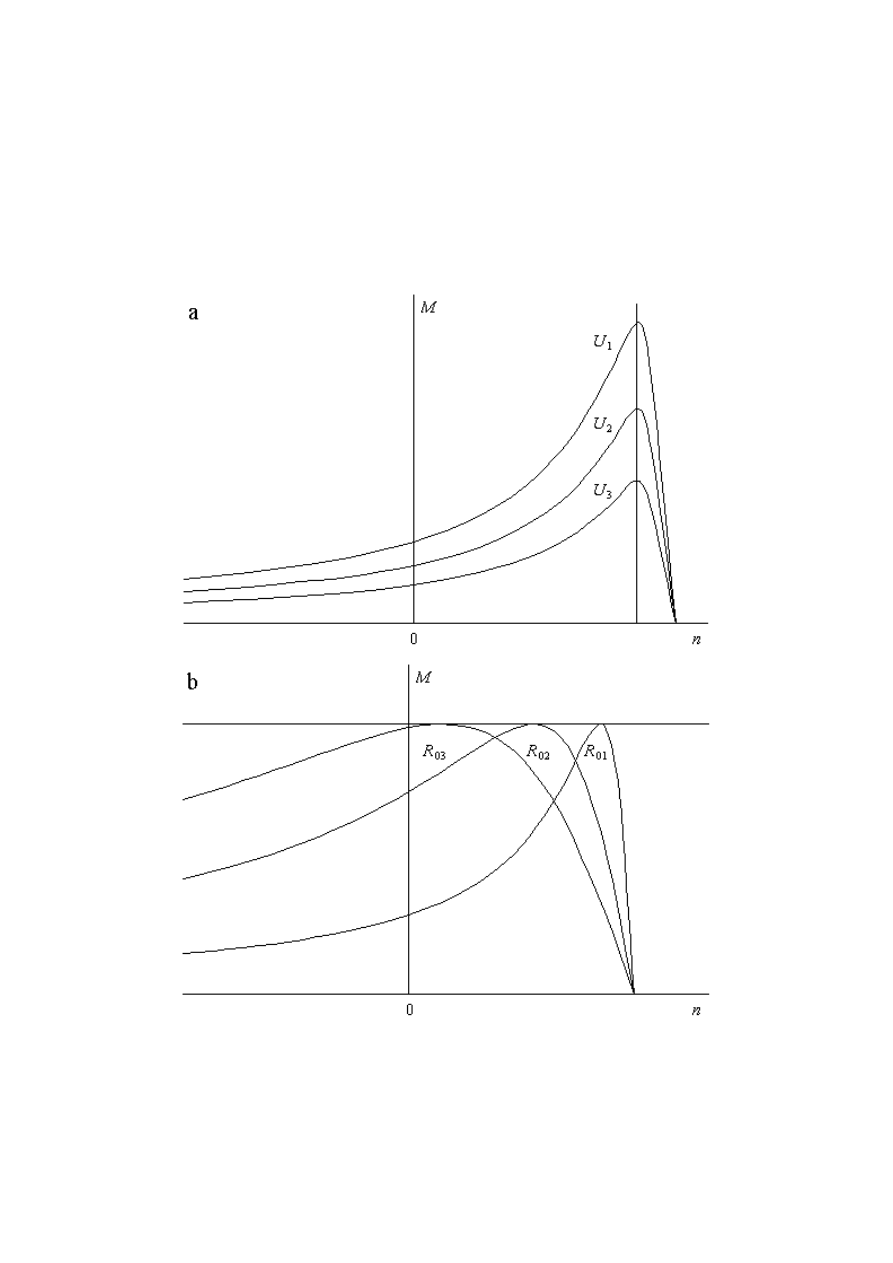
obrotowej obliczyd moment obrotowy silnika jako
(2.14)
Należy jednak pamiętad, że straty w maszynie hamulcowej, a więc i jej sprawnośd, są funkcją wielu
zmiennych, takich jak: napięcie, prąd, prędkośd obrotowa, temperatura. Aby można było korzystad z
wykresu
= f(P
el
), musi byd on wyznaczony dla takich samych wartości parametrów, jakie występują
dla danego pomiaru. W tym celu posługujemy się nie jedną, lecz całą rodziną charakterystyk,
wyznaczonych najczęściej dla różnych wartości prędkości obrotowych przy stałym napięciu na
zaciskach prądnicy. Należy wtedy pamiętad o utrzymaniu w czasie pomiarów stałej wartości napięcia.
6.2
Bezpośrednie metody pomiaru momentu
Jak wspomniano wcześniej, do pomiaru momentu obrotowego używa się hamulców pomiarowych.
Hamulec składa się z dwóch części. Pierwsza służy do obciążenia wału badanej maszyny wymaganym
momentem, a druga do pomiaru tego momentu. Do najczęściej spotykanych rodzajów hamulców
pomiarowych należą:
cierne,
elektromaszynowe,
indukcyjne.
23
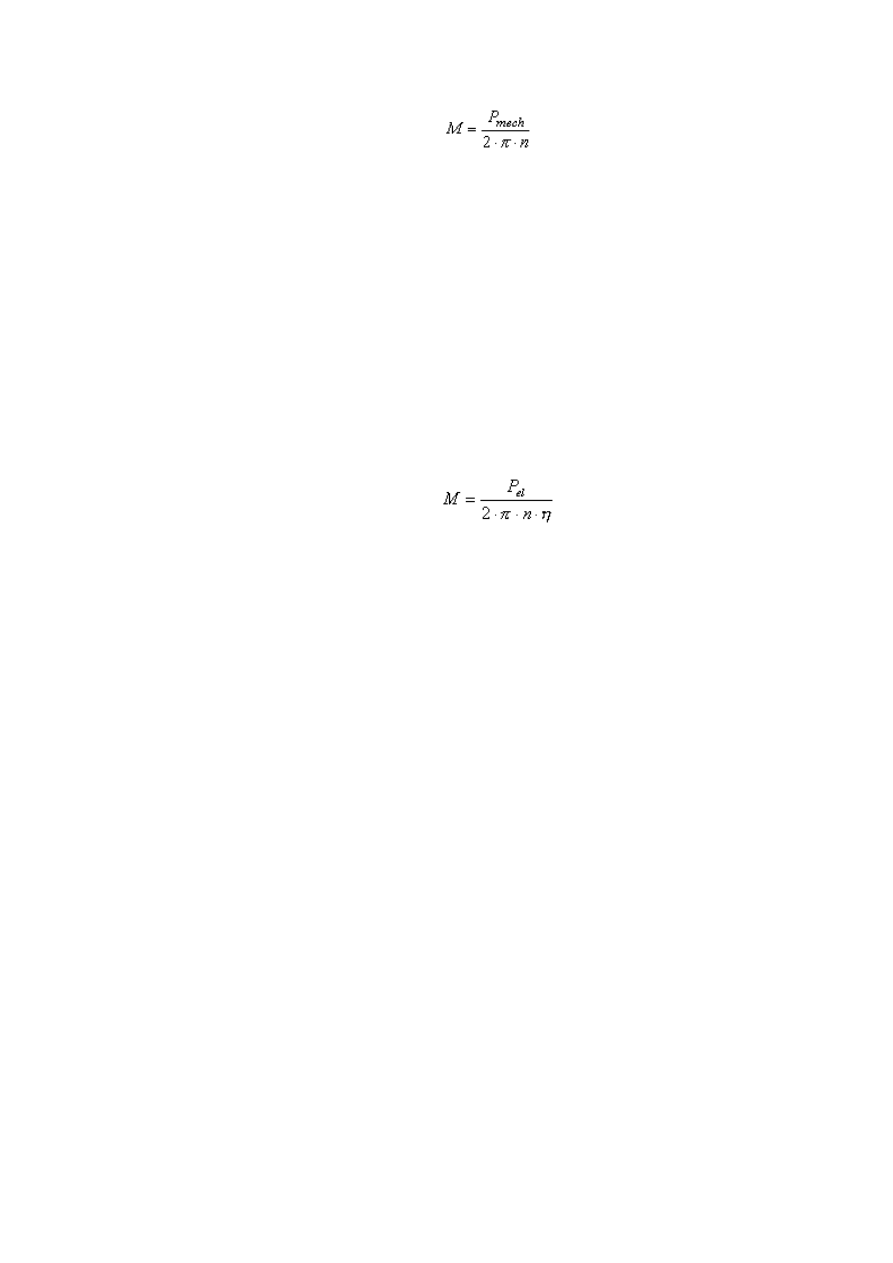
Rys. 2.5. Hamulec cierny klockowy
Hamulce cierne. Przykład hamulca ciernego przedstawiono na rys. 2.5. Na wał badanego silnika jest
nałożona tarcza, po której ślizgają się dociskane klocki hamulcowe. Siłę docisku można dowolnie
regulowad. Jeżeli badany silnik zostanie wprawiony w ruch, to na skutek tarcia między tarczą a
klockami na klocki będzie działał moment obrotowy zgodny z kierunkiem obrotów. Moment ten jest
równoważony przez naciąg sprężyny dynamometru zaczepionego na ramieniu l sztywno
sprzęgniętym z klockami ciernymi hamulca. Znając siłę F odczytaną z dynamometru i długośd
ramienia l, można obliczyd wartośd poszukiwanego momentu, którym jest obciążony silnik
(2.15)
Zmiana wartości momentu, którym jest obciążony silnik, następuje przez zmianę siły docisku klocków
hamulcowych. Ponieważ podczas pomiaru cała energia oddawana przez silnik jest zamieniona na
ciepło, klocki i tarcza rozgrzewają się. Długotrwałe obciążenie wymaga odprowadzenia od układu
dużych ilości ciepła, dlatego tarcza hamulcowa często jest wydrążona i wypełniona wodą, którą się
uzupełnia w miarę odparowywania.
Podaną zasadę hamowania i pomiaru momentu stosuje się najczęściej do badao mikromaszyn i
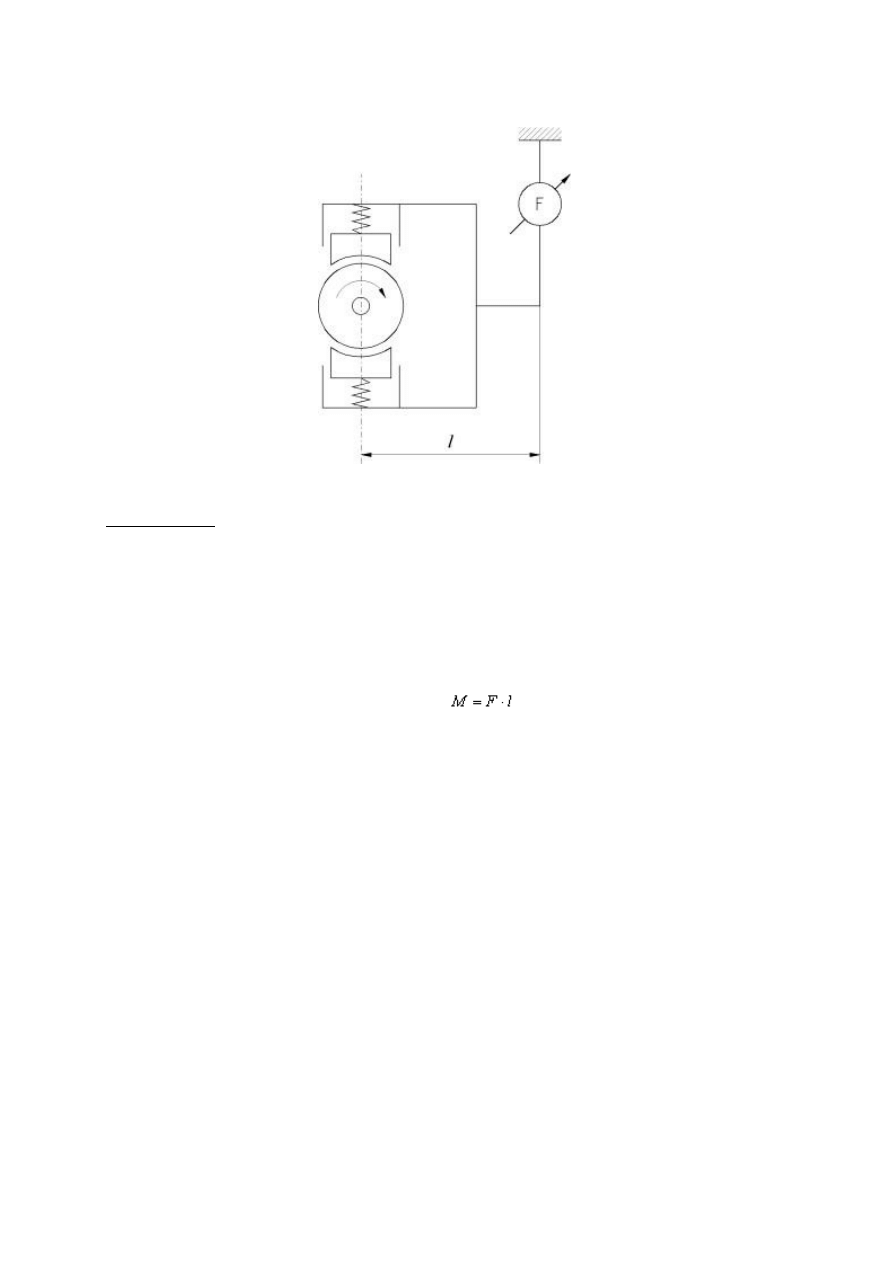
maszyn mocy ułamkowej. Funkcję klocków hamulcowych spełnia wtedy skórzany pasek (rys. 2.6).
24
Rys. 2.6. Hamulec cierny pasowy
Moment obciążenia silnika określa się ze wzoru
(2.16)
w którym: F – różnica wskazao dynamometrów,
r – promieo tarczy hamulcowej.
Wadą hamulców ciernych, utrudniającą wykonanie pomiarów, jest nagrzewanie trących się
elementów, co prowadzi do zmiany współczynnika tarcia, a w związku z tym i do zmiany momentu.
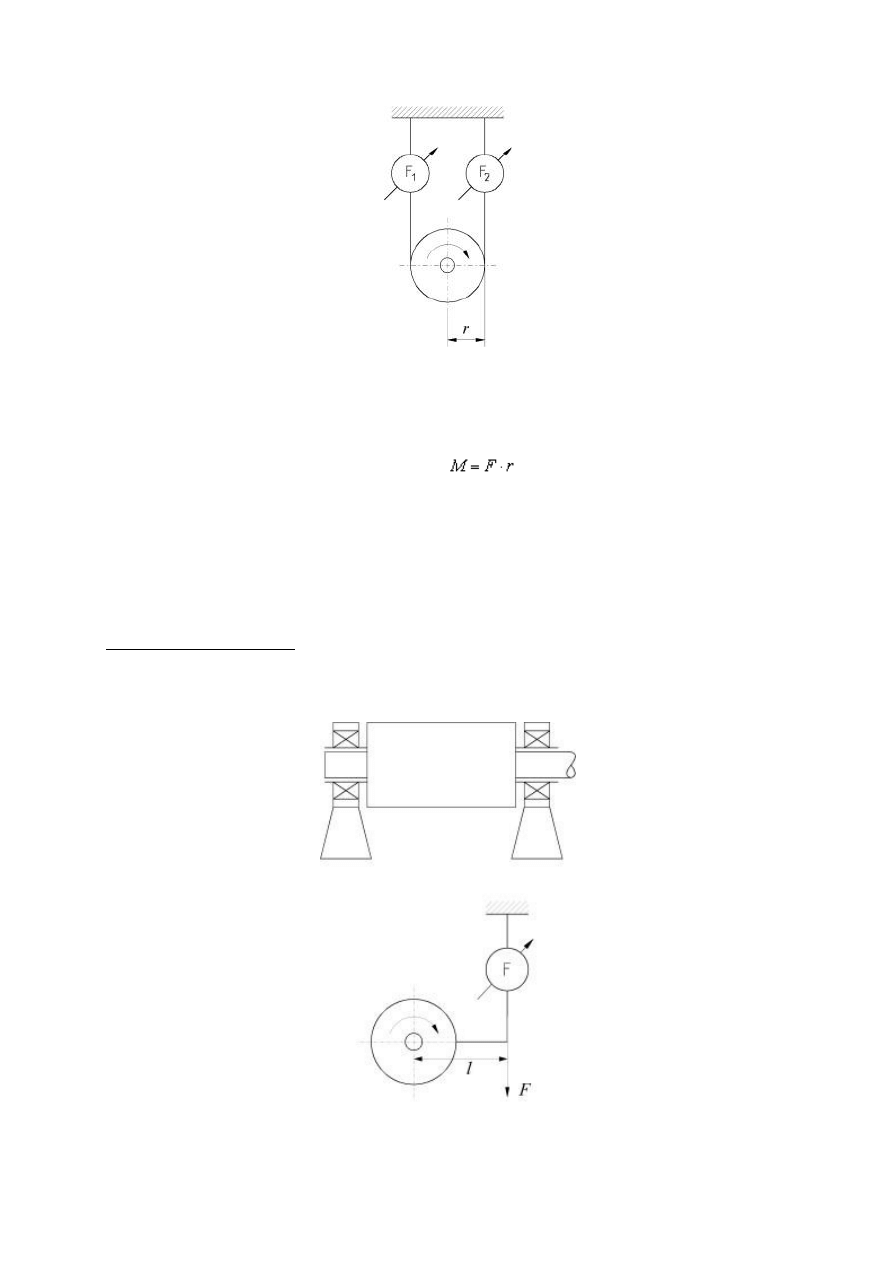
Hamulec elektromaszynowy jest maszyną elektryczną, której stojan nie stoi na łapach, jak w
normalnej maszynie (rys. 2.7), lecz jest dodatkowo ułożyskowany i może swobodnie obracad się. Na
ramieniu l, zamocowanym na sztywno do stojana, jest zamocowany dynamometr.
Rys. 2.7. Hamulec elektromaszynowy
25
Wspólną cechą hamulców elektromaszynowych jest to, że energia mechaniczna dostarczana przez
silnik nie jest tracona wewnątrz hamulca (z wyjątkiem strat mocy), lecz po zamianie na energię
elektryczną może byd oddawana do sieci lub tracona na opornikach obciążających. Po obciążeniu
maszyny hamulcowej między jej stojanem i wirnikiem powstaje moment będący wynikiem
oddziaływania twornika i strat mocy wewnątrz maszyny. Moment ten jest miarą momentu
wytwarzanego przez silnik. Mierzy się go podobnie jak w hamulcach ciernych, równoważąc siłę
działającą na stojan naciągiem sprężyny dynamometru.
Jako maszyny hamulcowe są zwykle stosowane prądnice bocznikowe prądu stałego, maszyny
asynchroniczne oraz maszyny komutatorowe prądu przemiennego.
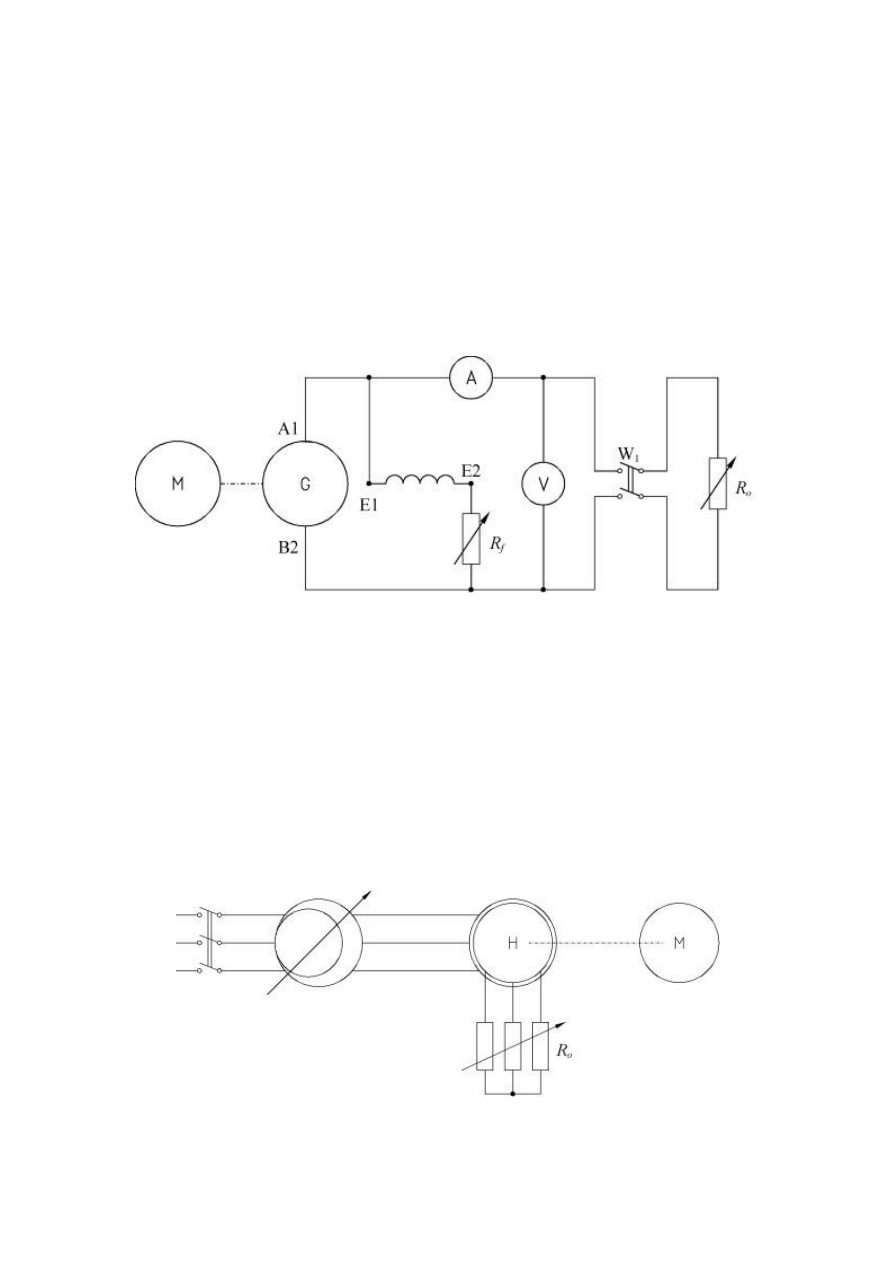
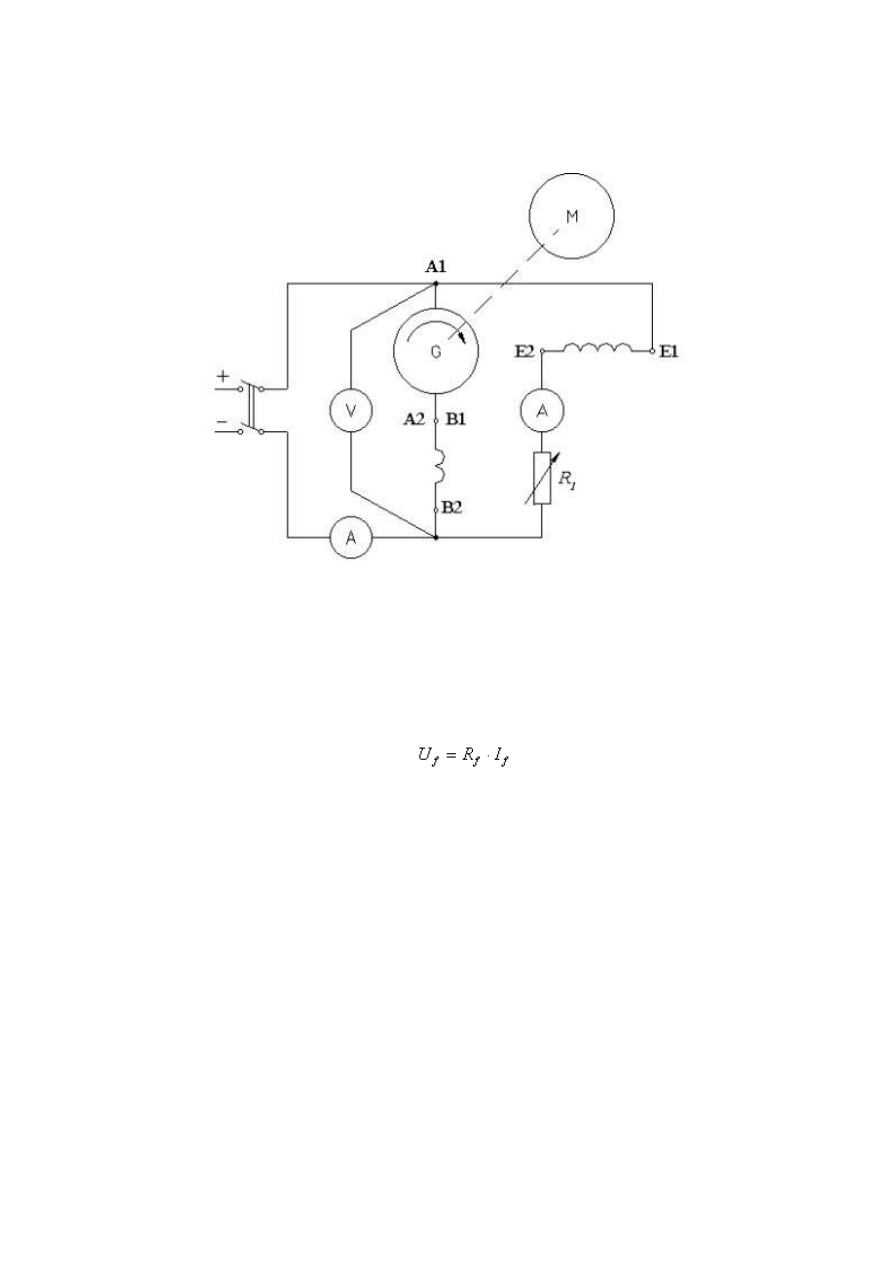
Rys. 2.8. Samowzbudna prądnica bocznikowa jako hamulec elektromaszynowy
Na rysunku 2.8 przedstawiono schemat elektryczny hamulca, w którym zastosowano prądnicę
bocznikową G. Chcąc badany silnik obciążyd zadanym momentem, należy wzbudzid prądnicę oraz po
zamknięciu wyłącznika W
1
obciążyd ją opornikiem regulacyjnym R
o
aż do uzyskania wymaganego
wskazania na dynamometrze. Przyrządy pomiarowe widoczne na rysunku służą tylko jako wskaźniki
kontrolne, aby zapobiec przekroczeniu wartości znamionowych prądu i napięcia. Zaletą tego typu
hamulca jest łatwa obsługa, wygodna regulacja momentu obciążenia oraz autonomia układu (nie
wymaga zasilania z obcych źródeł). Wadą natomiast jest niewielki moment hamujący prądnicy
wirującej ze zmniejszoną prędkością obrotową. To sprawia, że hamulce takie można stosowad jedynie
dla pewnego przedziału prędkości obrotowej. Niedogodnośd tę można złagodzid przez zastosowanie
obcego wzbudzenia.
Rys. 2.9. Maszyna indukcyjna pierścieniowa jako hamulec elektromaszynowy
26
Wad tych nie ma hamulec zbudowany z maszyny asynchronicznej pierścieniowej (rys. 2.9), w której
korzysta się z obszaru pracy w przeciwprądzie, tzn. z obszaru, w którym kierunek wirowania
strumienia wzbudzonego przez prądy w uzwojeniu stojana jest przeciwny do kierunku wirowania
badanego silnika. Wymagany moment obciążenia silnika uzyskuje się przez zmianę wartości napięcia
zasilającego stojan (rys. 2.10a) lub wartości rezystancji R
o
włączanej w obwód wirnika (rys. 2.10b) lub
jednocześnie obydwoma sposobami. Cenną zaletą tego hamulca jest możliwośd uzyskania dużych
momentów hamujących, nawet dla prędkości obrotowej n = 0.
Rys. 2.10. Regulacja momentu maszyny indukcyjnej przez: a - zmianę napięcia, b - zmianę rezystancji wirnika
Hamulec indukcyjny składa się z tarczy miedzianej lub aluminiowej, którą sprzęga się z wałem
badanego silnika. Tarcza ta wiruje w polu magnetycznym elektromagnesów zasilanych prądem

27
stałym, których wartośd strumienia można regulowad przez zmianę prądu wzbudzenia. W tarczy
indukują się prądy wirowe, powodując powstanie strat energii. Prądy te oddziałując na strumieo
elektromagnesów, powodują powstanie momentu obrotowego między tarczą a elektromagnesem.
Moment ten jest równoważony dynamometrem.
Hamulce indukcyjne są stosowane dla niewielkich wartości momentu. Ich wadą jest niewielki
moment hamujący, gdy prędkośd obrotowa jest mała, dlatego używa się je najczęściej do badao
wysokoobrotowych silników mocy ułamkowej.

28
ĆWICZENIE 11
BADANIE PRĄDNICY BOCZNIKOWEJ PRĄDU STAŁEGO
1
Program ćwiczenia
Pomiar rezystancji uzwojeo prądnicy.
Wyznaczenie charakterystyki biegu jałowego.
Wyznaczenie charakterystyki zwarcia.
Wyznaczenie charakterystyki obciążenia.
Wyznaczenie charakterystyki zewnętrznej.
Wyznaczenie charakterystyki regulacji.
Konstrukcyjne wyznaczenie charakterystyki zewnętrznej prądnicy samowzbudnej.
2
Cel ćwiczenia
Celem dwiczenia jest poznanie budowy, działania oraz własności eksploatacyjnych maszyny
bocznikowej prądu stałego pracującej jako prądnica. Wyznaczając charakterystyki, uzyskuje się
informacje o jakości maszyny (stabilnośd, stopieo nasycenia itp.) oraz sprawdza zgodnośd danych z
tabliczki znamionowej z rzeczywistymi. Uzyskuje się ponadto możliwośd konstrukcyjnego
przybliżonego wyznaczania charakterystyk ruchowych, co pozwala uniknąd, kłopotliwych przy dużych
mocach, pomiarów maszyny obciążonej.
3
Omówienie programu ćwiczenia
3.1
Połączenia uzwojeń prądnicy bocznikowej
Maszyna prądu stałego ma na wirniku uzwojenie twornika, a w stojanie jedno lub kilka uzwojeo:
wzbudzenia, uzwojenia komutacyjne, kompensacyjne, dodatkowe. W maszynie bocznikowej
uzwojenie wzbudzenia połączone jest równolegle z uzwojeniem twornika.
Biegunowośd napięcia prądnicy zależy od kierunku wirowania twornika i kierunku prądu w uzwojeniu
wzbudzenia. Poszczególne uzwojenia prądnicy należy łączyd tak, by na zacisku twornika, oznaczonym
A1, indukował się potencjał dodatni podczas wirowania wirnika maszyny w prawo. Bocznikowe
uzwojenie wzbudzenia dołączone jest wówczas tak, żeby prąd magnesujący płynął przez uzwojenie,
od zacisku oznaczonego E1 do zacisku oznaczonego E2. Wynika stąd, że do uzyskania wzmocnienia
strumienia szczątkowego i wzbudzenia prądnicy zaciski A1 i E1 powinny byd połączone ze sobą, jak to
pokazano na rysunku 11.1. Jako kierunek wirowania w prawo przyjmuje się taki, przy którym wał
maszyny widziany od strony przeciwnej do komutatora obraca się zgodnie z ruchem wskazówek
zegara.
Uzwojenia komutacyjne i kompensacyjne łączy się tak względem uzwojenia twornika, by we
wszystkich uzwojeniach połączonych szeregowo prąd płynął od zacisków o takim samym wskaźniku
liczbowym (np. A1, B1, C1). Wprawienie w ruch prądnicy, połączonej jak na rys. 11.1, wyindukuje w
jej tworniku SEM określoną wartością remanentu magnetycznego. Pod wpływem tego napięcia w
uzwojeniu wzbudzenia zaczyna płynąd prąd I
f
, który powoduje wzrost strumienia magnetycznego.
29
Zwiększony strumieo zwiększa napięcie indukowane w tworniku, a to z kolei zwiększa prąd
wzbudzenia I
f
. Następuje więc samowzbudzenie się prądnicy.
Rys. 11.1. Układ połączeo prądnicy bocznikowej
Jeżeli prądnica nie jest obciążona, to prąd płynący w obwodzie twornika I
t
jest równy prądowi
wzbudzenia. Jest on bardzo mały, gdyż znamionowy prąd wzbudzenia jest równy (0,01-0,05)·I
n
. Gdy
nastąpi stan ustalony, tzn. I
f
osiągnie wartośd stałą, napięcie na zaciskach maszyny osiągnie wartośd
określoną zależnością
(11.1)
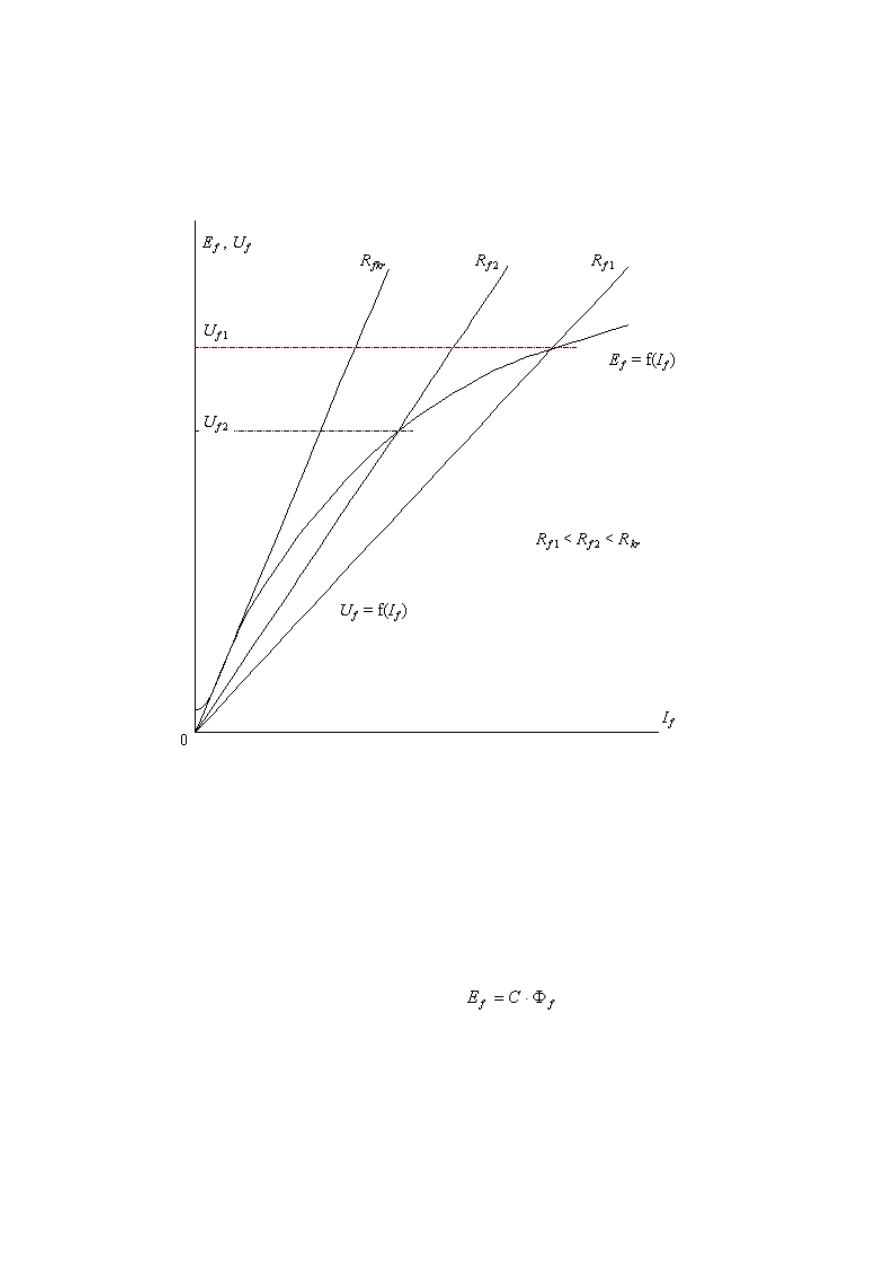
Wartośd napięcia będzie więc określona przez punkt A przecięcia się prostej R
f
· I
f
z charakterystyką
biegu jałowego E
f
= f(I
f
) (rys. 11.2).
Zwiększenie rezystancji obwodu wzbudzenia obniża punkt przecięcia charakterystyk, zmniejsza więc
napięcie. Zwiększenie rezystancji R
f
do wartości, dla której prosta R
f
· I
f
pokrywa się z prostoliniową
częścią charakterystyki biegu jałowego, prowadzi do niestabilnej pracy prądnicy. Rezystancja obwodu
wzbudzenia w takim przypadku nazywa się krytyczną R
kr
. Aby praca maszyny była stabilna, jej punkt
pracy musi leżed powyżej zakrzywienia charakterystyki biegu jałowego, czyli R
f
R
kr
. Zwiększenie
rezystancji R
f
ponad wartośd krytyczną uniemożliwia wzbudzenie się prądnicy.
Niewzbudzanie się prądnicy bocznikowej może wynikad z:
braku strumienia remanentu (rozmagnesowanie maszyny),
niewłaściwego kierunku wirowania lub niewłaściwego połączenia uzwojenia wzbudzenia i
twornika,
zbyt dużej rezystancji w obwodzie wzbudzenia R
f
R
kr
(w skrajnym przypadku przerwa w
obwodzie),
30
za małej prędkości obrotowej twornika.
W razie rozmagnesowania maszyny należy jej obwód wzbudzenia załączyd do obcego źródła napięcia
stałego.
Rys. 11.2. Ilustracja warunku samowzbudzenia się prądnicy
3.2
Pomiar charakterystyki biegu jałowego
Charakterystyka biegu jałowego jest to zależnośd SEM E
f
indukowanej w tworniku od prądu
wzbudzenia I
f
przy braku obciążenia i stałej prędkości obrotowej n (E
f
= f(I
f
) przy I
t
= 0 oraz n = const).
Jest to szczególny przypadek charakterystyki obciążenia U = f(I
f
) przy I
t
= 0. Gdy prędkośd obrotowa
jest stała, SEM twornika jest proporcjonalna do strumienia magnetycznego
f
(11.2)
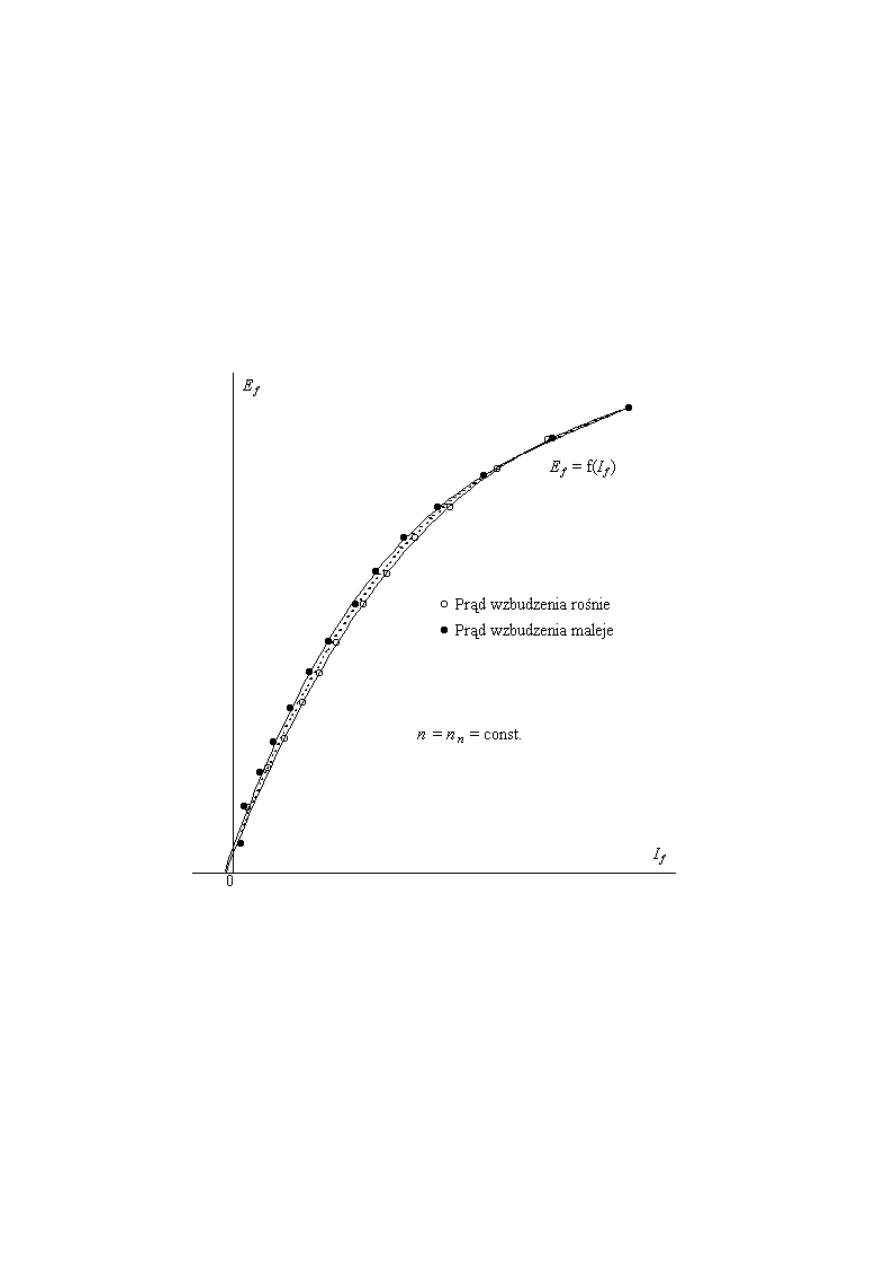
stanowi wiec obraz krzywej magnesowania maszyny. Ze względu na zjawisko histerezy inny jest
przebieg charakterystyki przy zwiększającym się, a inny przy malejącym prądzie wzbudzenia. Za
charakterystykę biegu jałowego uważa się krzywą leżącą między krzywymi zdjętymi przy narastaniu i
opadaniu prądu wzbudzenia (rys. 11.3).
31
Aby uniknąd niestabilności pracy maszyny oraz wpływu obciążenia prądem wzbudzenia,
charakterystykę biegu jałowego wyznacza się w układzie obcowzbudnym, przedstawionym na rys.
11.4. Pomiary rozpoczyna się od zmierzenia SEM remanentu przy I
f
= 0. Następnie zwiększając prąd
wzbudzenia, wyznaczamy kolejne punkty charakterystyki aż do osiągnięcia wartości SEM E
f
= 1,25·U
n
.
Drugą gałąź charakterystyki uzyskuje się przez zmniejszanie prądu wzbudzenia aż do osiągnięcia I
f
= 0.
Podczas pomiarów prąd musi zmieniad się jednokierunkowo. Każda zmiana kierunku przyrastania
prądu powoduje przejście na inną charakterystykę magnesowania. Charakterystyka biegu jałowego
musi byd wyznaczona dokładnie, szczególnie w obszarze E
rem
, gdyż służy do wyznaczenia trójkąta
charakterystycznego. Należy więc wykonad około dziesięciu pomiarów dla każdej z gałęzi
charakterystyki, a wyniki pomiarów zestawid w tabeli 11.1.
Rys. 11.3. Charakterystyka biegu jałowego
32
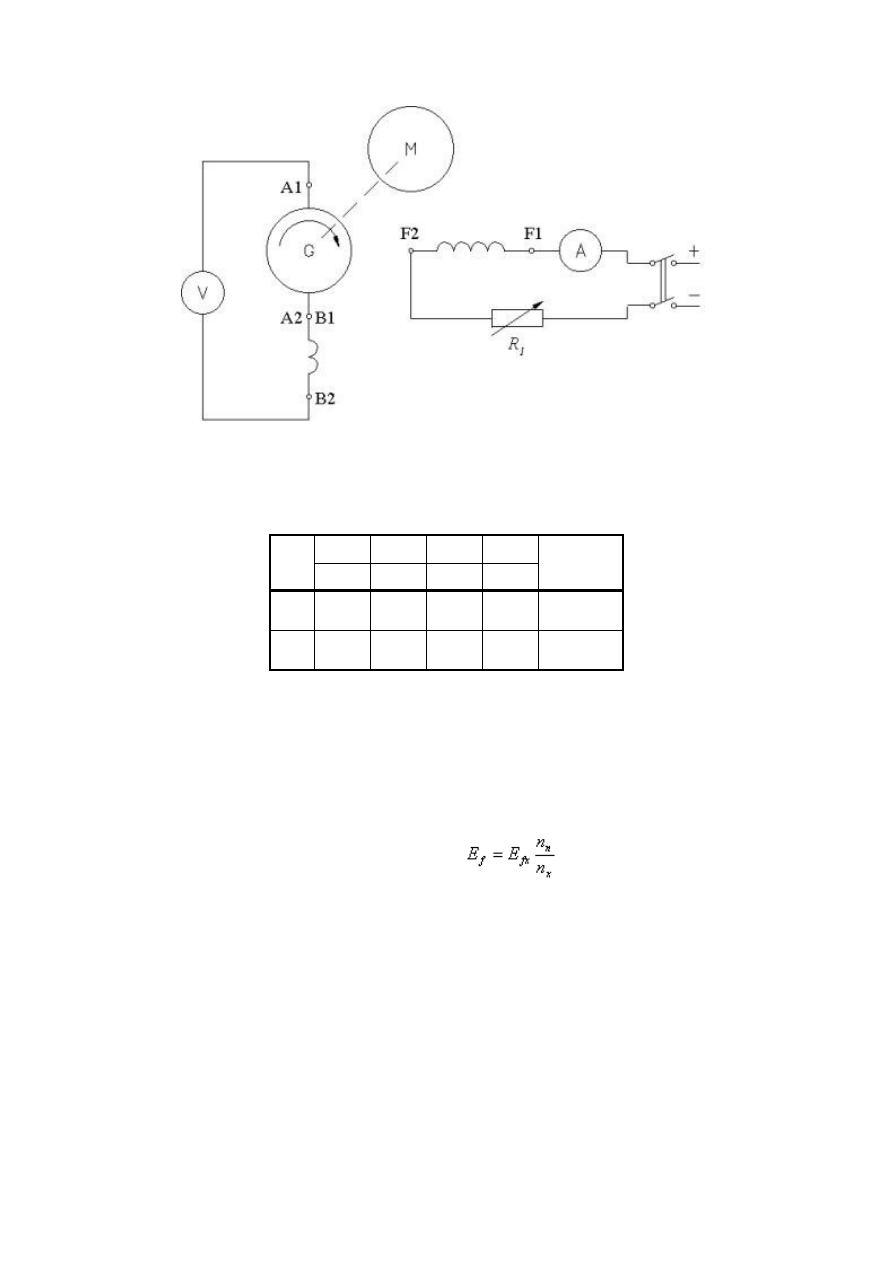
Rys. 11.4. Układ obcowzbudny do pomiaru charakterystyk biegu jałowego
Tabela 11.1
Lp.
I
f
E
fx
n
x
E
f
Uwagi
A
V
obr/s
V
I
f
wzrasta
I
f
maleje
Charakterystyka biegu jałowego może byd wyznaczona również w układzie bocznikowym, lecz leży
wówczas poniżej charakterystyki zdjętej w układzie obcowzbudnym. Wynika to stąd, że SEM
mierzona na zaciskach twornika jest wówczas pomniejszona o spadek napięcia wywołany
przepływem prądu wzbudzenia przez uzwojenie twornika. Jeżeli pomiary są wykonywane przy
prędkości różnej od znamionowej n
n
, to E
f
należy obliczyd wg wzoru
(11.3)
Wykreślenie charakterystyki biegu jałowego pozwala na:
przybliżone określenie udziału spadków napięd magnetycznych przypadających na szczelinę U
i
żelazo U
w SEM obwodu magnetycznego maszyny,
wyznaczanie rezystancji krytycznej R
kr
obwodu wzbudzenia,
określenie zakresu pracy stabilnej w układzie samowzbudnym.
33
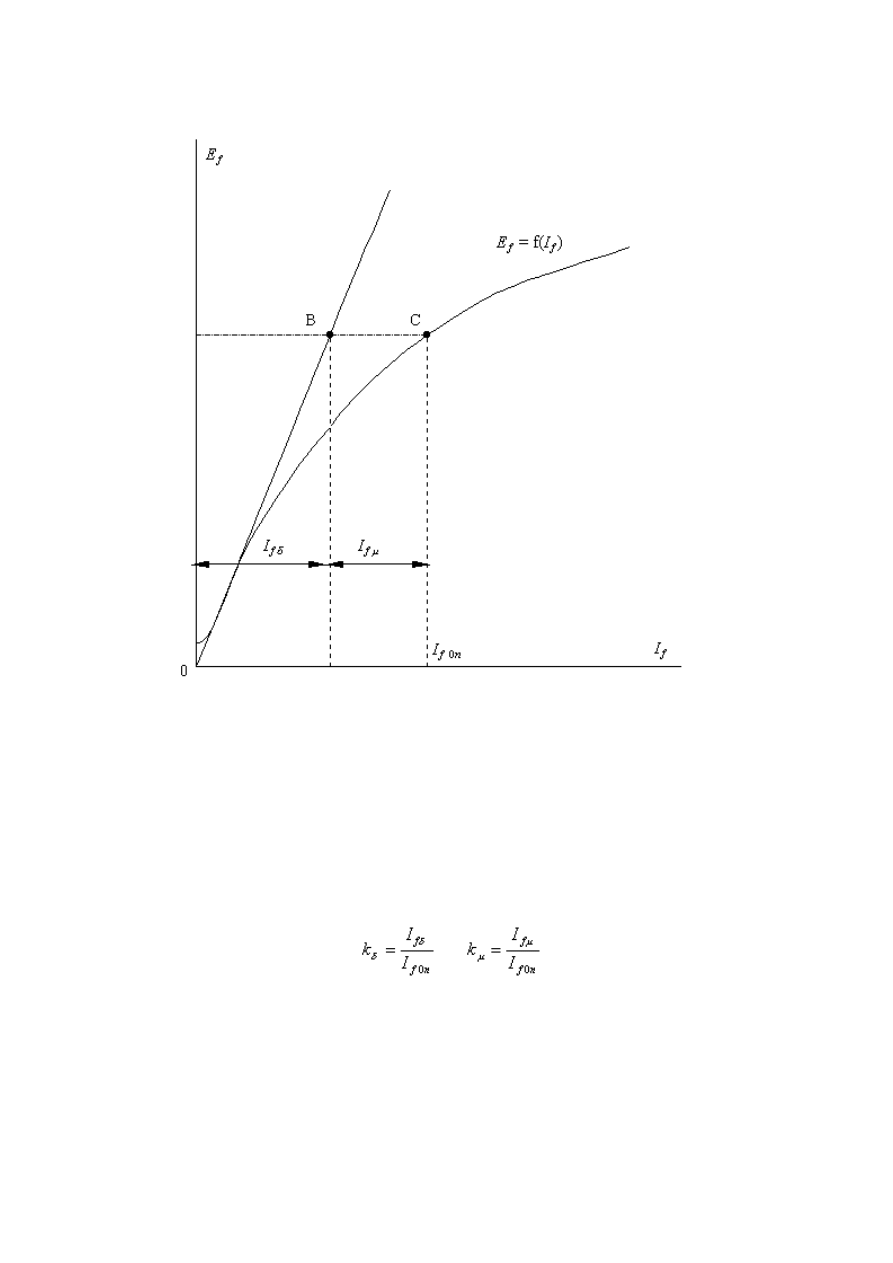
Rys. 11.5. Udział spadków napięd magnetycznych w SEM maszyny
Sposób wyznaczenia udziałów spadków napięd magnetycznych pokazano na rysunku 11.5. Punkt B,
rozdzielający SMM na U
i U
, jest punktem przecięcia się prostej E
f
= U
n
oraz prostej pokrywającej się
z prostoliniową częścią charakterystyki biegu jałowego. Ponieważ SMM oraz spadki napięd
magnetycznych są proporcjonalne do prądu wzbudzenia, więc do określenia udziałów spadków
napięd magnetycznych wystarczy podzielid znamionowy prąd wzbudzenia podczas biegu jałowego I
f0n
na części I
f
i I
f
, proporcjonalnie do U
i U
. Stąd udziały spadków napięd magnetycznych są określone
następująco
;
(11.4)
Współczynnik k
określający udział w SMM spadku napięcia magnetycznego w żelazie informuje o
stopniu nasycenia maszyny. I tak dla
k
= 0,2-0,4 – maszyna słabo nasycona,
k
= 0,4-0,6 – maszyna średnio nasycona,
34
k
0,6 – maszyna silnie nasycona.
Charakterystyka przedstawiona na rys. 11.2, 11.3 i 11.5 jest rzeczywistą charakterystyką badanej
maszyny i znacznie odbiega od charakterystyki normalnej.
3.3
Pomiar charakterystyki zwarcia
Charakterystyka zwarcia jest to zależnośd prądu twornika I
t
od prądu wzbudzenia I
f
przy zwartych
zaciskach twornika i stałej prędkości obrotowej (I
t
= f(I
f
) przy n = n
n
= const, U = 0).
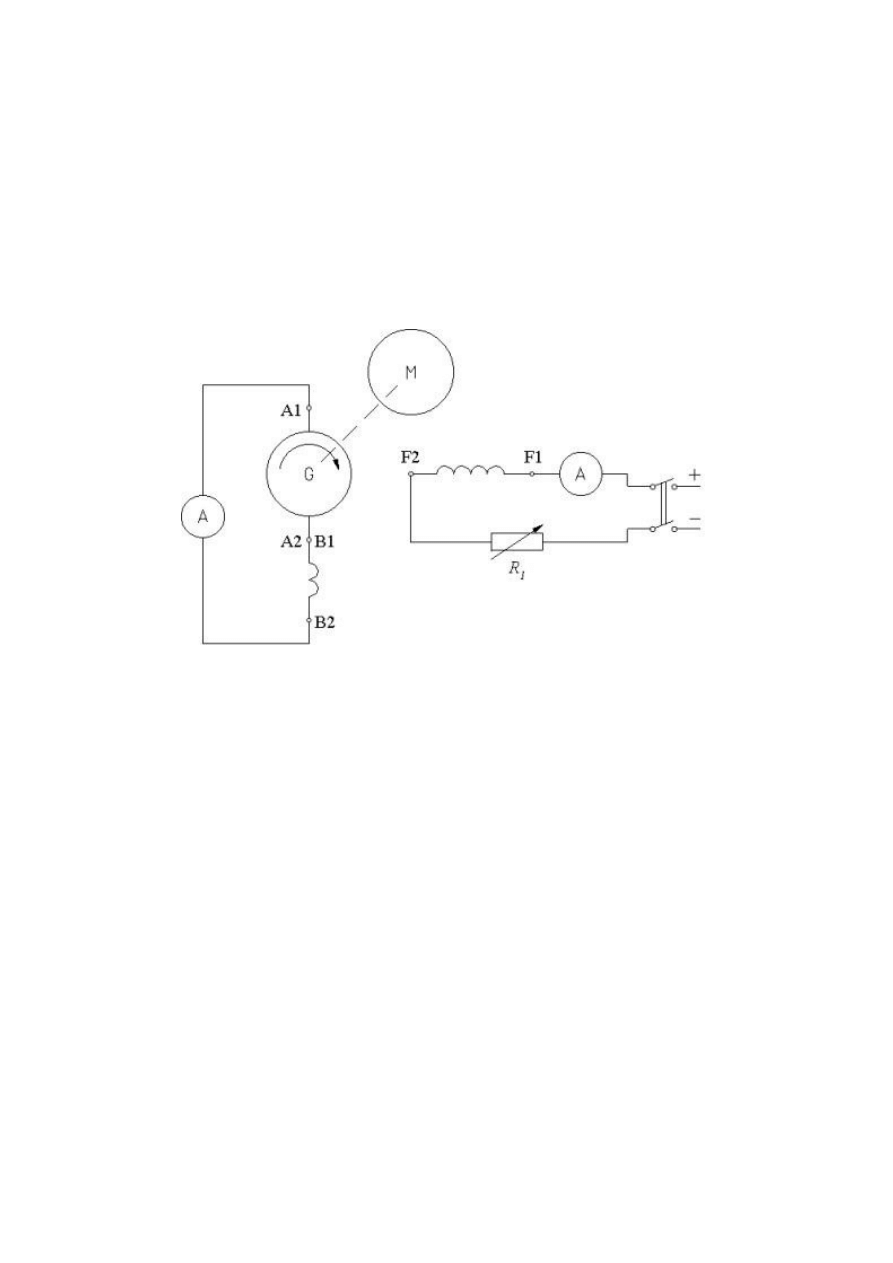
Rys. 11.6. Układ do pomiaru charakterystyki zwarcia
Układ pomiarowy przedstawiono na rysunku 11.6. Prądnica wzbudzana jest ze źródła obcego, a
twornik jest zwarty przez amperomierz. Po doprowadzeniu prądnicy do prędkości znamionowej
należy wykonad około pięciu pomiarów, zwiększając prąd wzbudzenia od zera do wartości, przy
której prąd twornika osiągnie wartośd 1,2·I
n
. Wyniki pomiarów zestawione w tabeli 11.2 pozwalają
wykreślid charakterystykę zwarcia (rys. 11.7). SEM indukowana w tworniku prądnicy podczas zwarcia
jest równa sumie spadków napięd na rezystancjach obwodu twornika, a więc jest niewielka. Obwód
magnetyczny jest zatem nienasycony, a charakterystyka zwarcia jest linią prostą.
35
Rys. 11.7. Charakterystyka zwarcia
36
Rys. 11.8. Trójkąt charakterystyczny
Charakterystyki zwarcia i biegu jałowego pozwalają na wykreślenie trójkąta charakterystycznego,
przydatnego do konstrukcyjnego wyznaczenia charakterystyk ruchowych. Trójkąt charakterystyczny
(rys. 11.8) jest trójkątem prostokątnym, którego przyprostokątna AB określa wpływ oddziaływania
twornika na wartośd strumienia głównego, a tym samym i E
f
, a przyprostokątna BC jest równa
wartości spadku napięcia na rezystancjach obwodu twornika, który wynosi:
(11.5)
gdzie: e
sz
– spadek napięcia na szczotkach.
Przyprostokątna AB zależy od stopnia nasycenia obwodu magnetycznego maszyny. Zatem
charakterystyki wyznaczone za pomocą trójkąta charakterystycznego są przybliżone. Na rys. 11.8 linią
przerywaną zaznaczono przypadek szczególny trójkąta charakterystycznego dotyczący maszyny o
SEM remanentu większej od spadku napięcia na rezystancjach obwodu twornika. Przedstawiona na
rys. 11.7 charakterystyka zwarcia nie jest typowa, gdyż badana maszyna posiada dozwojenie
szeregowe.
Tabela 11.2
Lp.
I
f
I
t
Uwagi
A
A
3.4
Pomiar charakterystyk obciążenia
Charakterystyka obciążenia jest to zależnośd napięcia na zaciskach twornika U od prądu wzbudzenia I
f
przy stałym prądzie twornika I
t
i stałej prędkości obrotowej (U = f(I
f
), I
t
= const, n = n
n
=const).
37
Rys. 11.9. Układ do pomiaru charakterystyki obciążenia
Schemat układu pomiarowego przedstawiono na rysunku 11.9. Charakterystyka obciążenia jest
podobna do charakterystyki biegu jałowego i podobnie jak ona leży pośrodku między dwiema
krzywymi zdjętymi przy zwiększającym się i przy malejącym prądzie wzbudzenia.
Pomiary rozpoczyna się od zwarcia twornika (R
o
= 0). Prąd wzbudzenia reguluje się tak, by w zwartym
obwodzie twornika płynął prąd znamionowy. Aby uzyskad następny punkt pomiarowy, zwiększa się
prąd wzbudzenia oraz rezystancję obciążającą R
o
, tak by przy zwiększonym napięciu utrzymad stałą
wartośd prądu I
t
= I
n
. Postępując w ten sposób należy zmierzyd około 8 punktów charakterystyki aż do
osiągnięcia napięcia U = 1,25·U
n
. Drugą gałąź charakterystyki zdejmuje się przy prądzie malejącym.
Wyniki pomiarów należy zestawid w tabeli 11.3.
Tabela 11.3
Lp.
I
f
U
I
t
n
Uwagi
A
V
A
obr/s
I
f
wzrasta
I
f
maleje
a na ich podstawie wykreślid charakterystykę obciążenia. Charakterystyka obciążenia wespół z
charakterystyką biegu jałowego pozwalają wyznaczyd trójkąty charakterystyczne przy różnych
napięciach oraz charakterystykę wewnętrzną, tj. zależnośd E = f(I
f
) przy I
t
= const, n = const.
38
Rys. 11.10. Charakterystyki obciążenia i wewnętrzna
Charakterystykę tę wyznacza się, dodając pionowo w górę do charakterystyki obciążenia odcinki
równe spadkowi napięcia wywołanego prądem I
t
, dla którego wyznaczono charakterystykę
obciążenia (rys. 11.10). Odcinki poziome między charakterystykami wewnętrzną i biegu jałowego
określają przy różnych napięciach rozmagnesowujący wpływ oddziaływania twornika.
Jeżeli szczotki są ustawione w magnetycznej osi neutralnej, to składowa podłużna oddziaływania
twornika nie występuje.
3.5
Pomiar charakterystyki zewnętrznej
Charakterystyka zewnętrzna informuje o reakcji maszyny na zmianę obciążenia. Jest to zależnośd
napięcia na zaciskach twornika U od prądu obciążenia I, przy stałej rezystancji obwodu wzbudzenia R
f
i stałej prędkości obrotowej (U = f(I
f
) przy R
f
= const i n = n
n
= const).
39
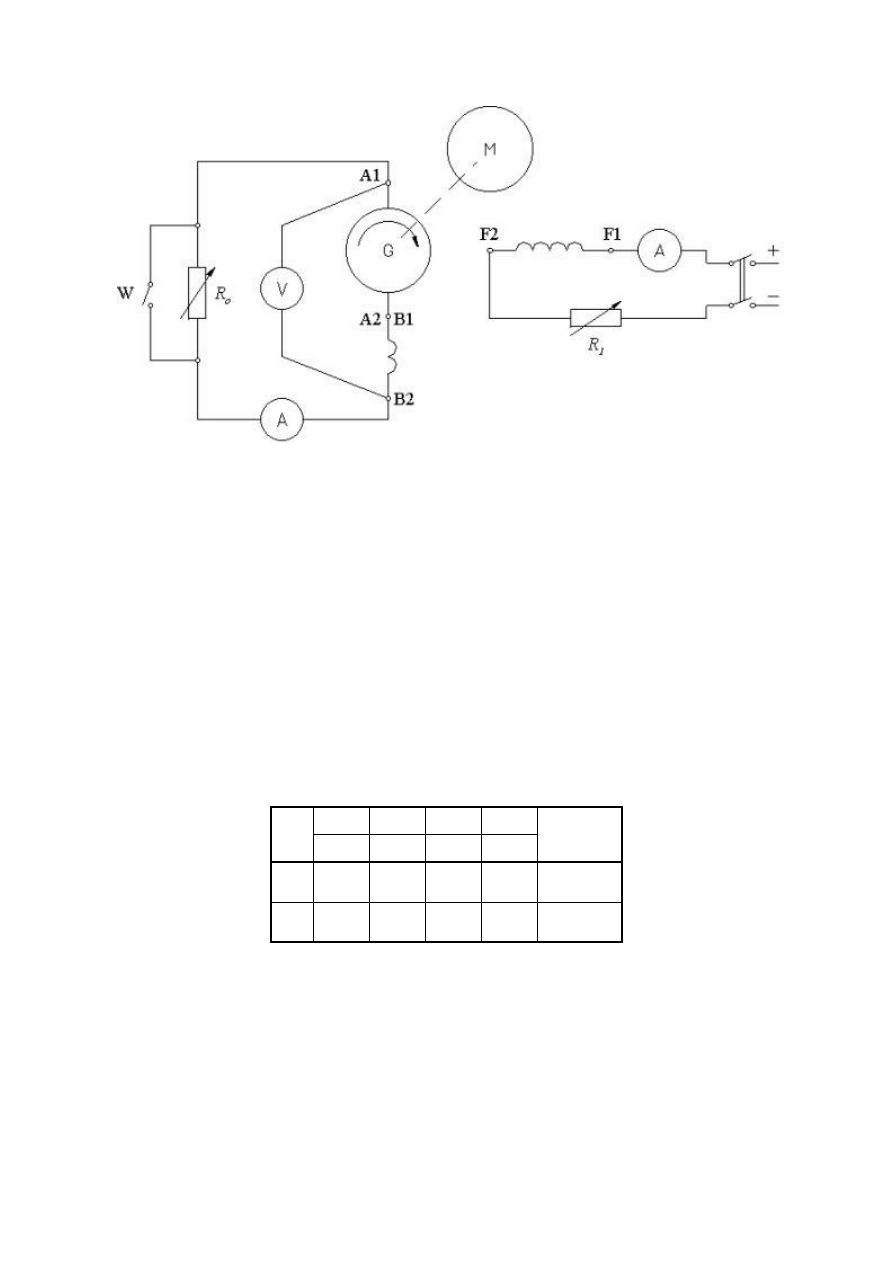
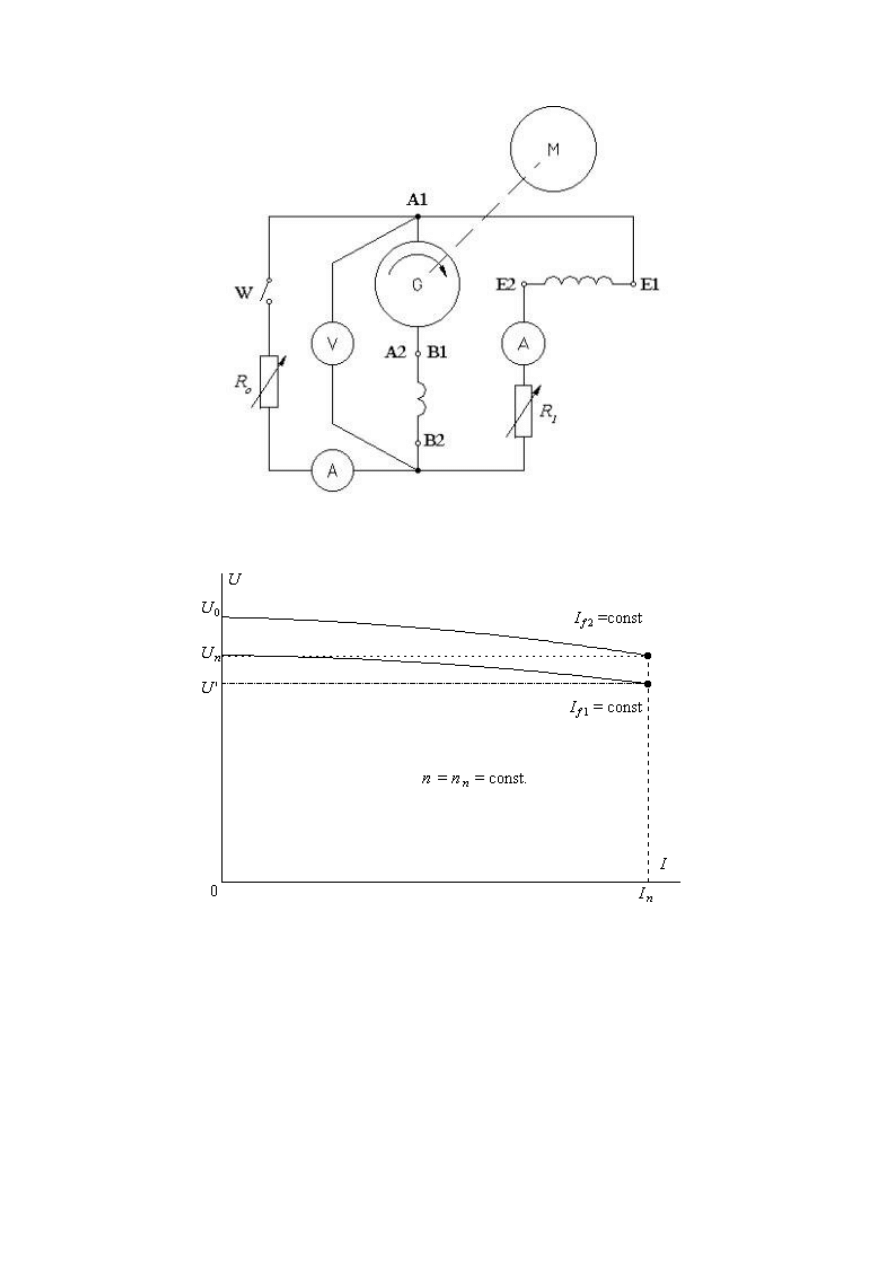
Rys. 11.11. Układ do pomiaru charakterystyki zewnętrznej i regulacji
Rys. 11.12. Charakterystyka zewnętrzna
Schemat układu pomiarowego przedstawiono na rysunku 11.11. Prądnica pracuje w układzie
samowzbudnym. Pomiary rozpoczyna się przy biegu jałowym (I = 0), ustawiając tak opornik
regulacyjny w obwodzie wzbudzenia, by napięcie na zaciskach twornika było równe znamionowemu
U = U
n
. Następnie nie zmieniając rezystancji obwodu wzbudzenia, zmienia się wartośd rezystancji
obciążającej R
o
i odnotowuje zmiany napięcia i prądu w tabeli 11.4. Po uzyskaniu prądu
znamionowego I = I
n
rozpoczyna się zdejmowanie drugiej gałęzi charakterystyki. Zmieniając
rezystancję obwodu wzbudzenia, ustala się znamionowy punkt pracy (I = I
n
, U = U
n
) i następnie przy
40
niezmiennej rezystancji R
f
odciąża się maszynę. W ten sposób powstaje druga gałąź charakterystyki
zewnętrznej, która służy do wyznaczania znamionowej zmienności napięcia. Znamionowa zmiennośd
napięcia jest to zmiana napięcia, względna w stosunku do napięcia znamionowego, występująca przy
odciążeniu nagrzanej maszyny od mocy znamionowej do biegu jałowego przy zachowaniu
znamionowej prędkości obrotowej i znamionowych warunków pracy oraz w przypadku prądnic
obcowzbudnych znamionowego prądu wzbudzenia, w przypadku zaś prądnic bocznikowych i
szeregowo-bocznikowych – oporu bocznikowego obwodu wzbudzenia. Znamionową zmiennośd
napięcia określa się wzorem (rys. 11.12)
(11.6)
Procentowy spadek napięcia przy obciążeniu maszyny od biegu jałowego przy U = U
n
do stanu
obciążenia prądem I = I
n
określa się wzorem
(11.7)
a procentowy wzrost napięcia przy odciążeniu maszyny od obciążenia znamionowego U = U
n
, I = I
n
do
biegu jałowego określa się zależnością
(11.8)
Tabela 11.4
Lp.
I
U
Uwagi
A
V
I rośnie,
R
f1
= const
I maleje,
R
f2
= const
Na podstawie wyników pomiarów zestawionych w tabeli 11.4 należy wykreślid charakterystyki
zewnętrzne, a następnie obliczyd znamionową zmiennośd napięcia. Obliczoną wartośd należy
porównad z gwarantowaną przez wytwórcę.
41
3.6
Pomiar charakterystyki regulacji
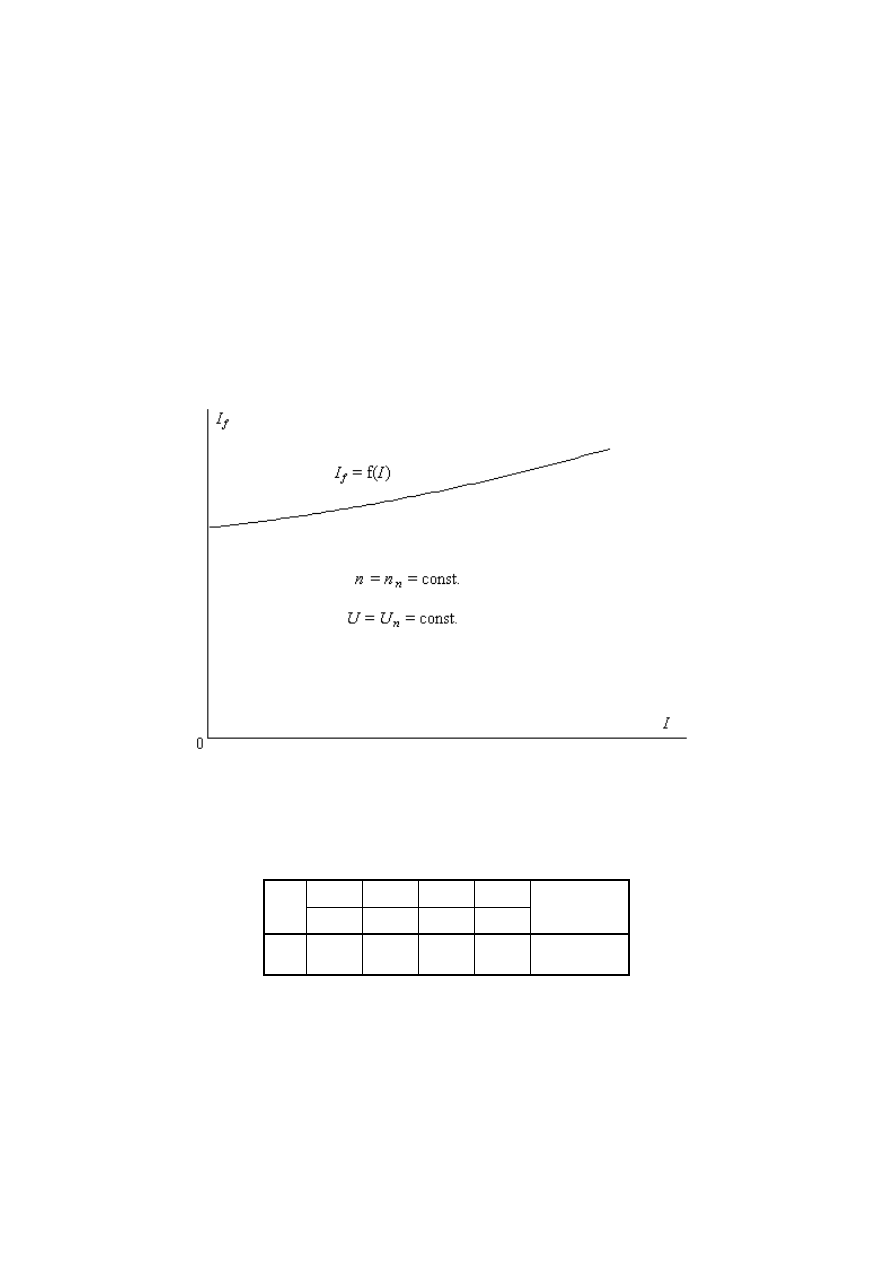
Charakterystyka regulacji informuje jak należy regulowad prąd wzbudzenia I
f
, aby przy zmieniającym
się prądzie obciążenia I i stałej prędkości obrotowej n utrzymad stałe napięcie U na zaciskach
prądnicy (I
f
= f(I) przy U = U
n
= const i n = n
n
= const). Układ pomiarowy przedstawiono na rys. 11.11.
Pomiary rozpoczyna się od ustalania takiego prądu wzbudzenie przy biegu jałowym, aby napięcie
miało wartośd znamionową. Następnie utrzymując stałą prędkośd obrotową n = n
n
, zmienia się prąd
obciążenia od I = 0 do I = 1,2·I
n
przez zmianę wartości rezystancji obciążającej R
o
. Stałą wartośd
napięcia U = U
n
uzyskuje się przez regulację prądu wzbudzenia I
f
.
Wyniki pomiarów należy zestawid w tabeli 11.5 i na ich podstawie wykreślid charakterystykę regulacji
(rys. 11.13).
Rys. 11.13. Charakterystyka regulacji
Tabela 11.5
Lp.
I
f
I
U
n
Uwagi
A
A
V
obr/s
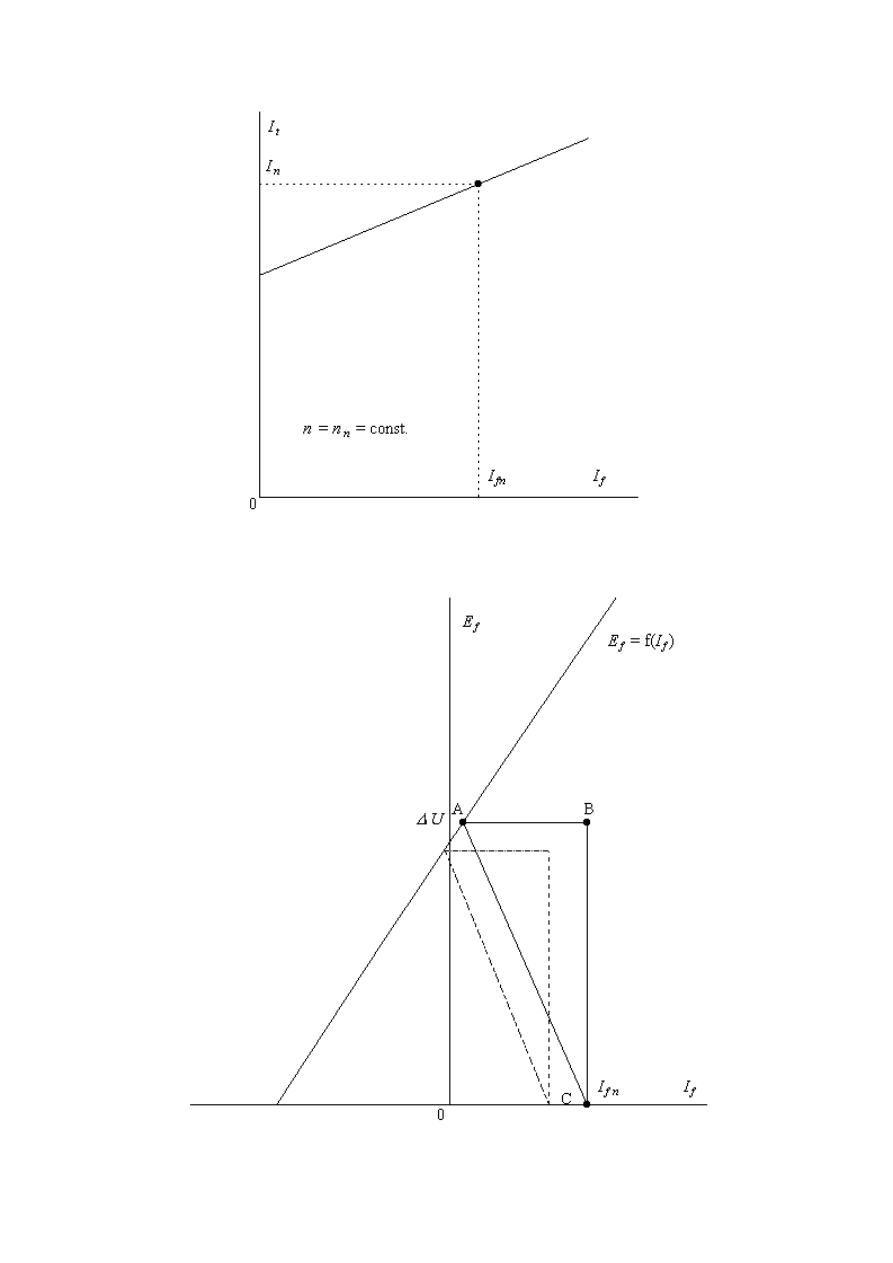
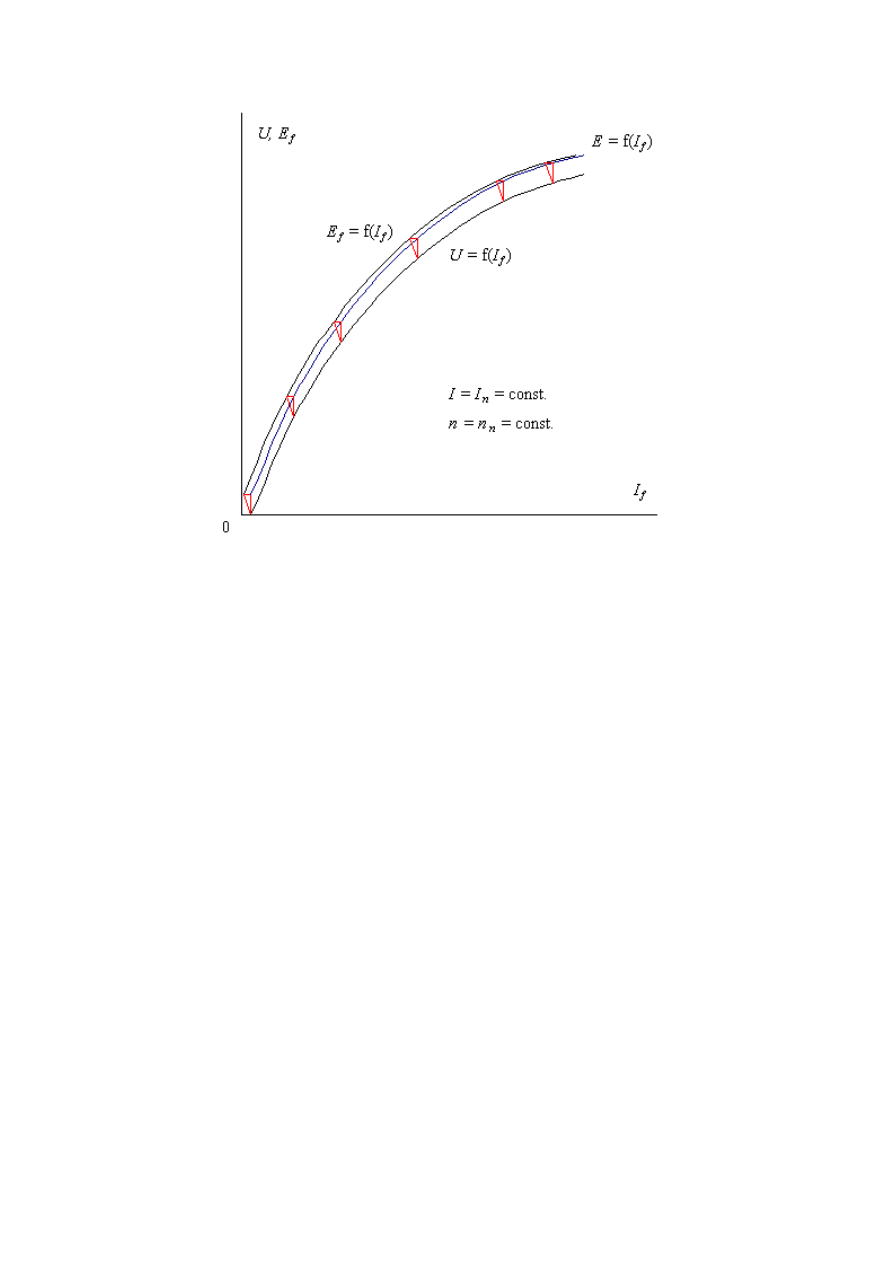
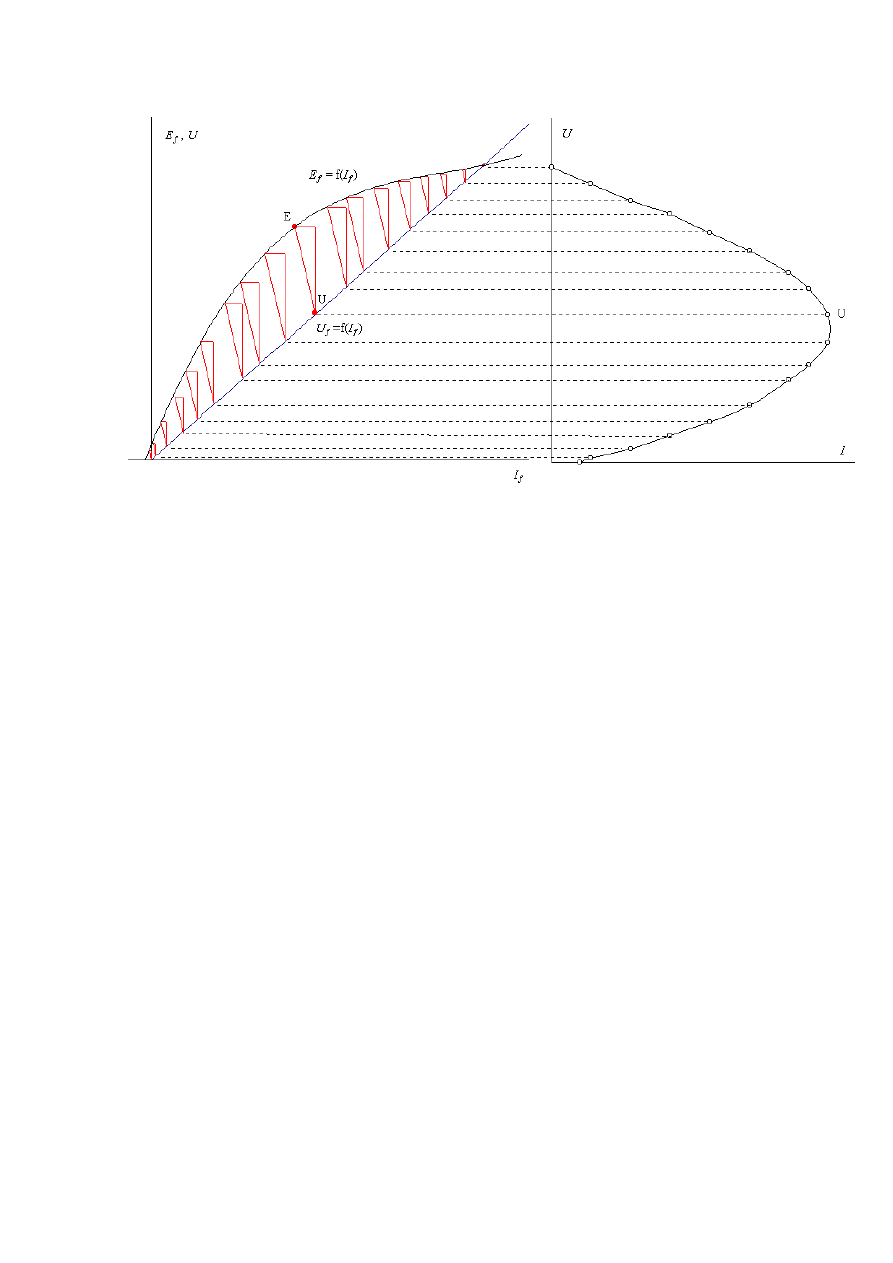
Do konstrukcyjnego wyznaczenia charakterystyki zewnętrznej potrzebna jest charakterystyka biegu
jałowego oraz trójkąt charakterystyczny. Przyjmuje się przy tym założenie upraszczające, że długości
boków trójkąta charakterystycznego są wprost proporcjonalne do prądu obciążenia prądnicy. W
układzie współrzędnych U, I
f
miejscem geometrycznym punktów odpowiadających napięciu U na
zaciskach prądnicy jest prosta k (rys. 11.14), prostopadła do osi odciętych (I
f
) i przecinająca ją w
punkcie odpowiadającym prądowi wzbudzenia, dla którego jest budowana charakterystyka
zewnętrzna (np. I
fn
). W obszarze ograniczonym charakterystyką biegu jałowego i prostą k można
42
wrysowad szereg trójkątów charakterystycznych, których wierzchołki E leżą na charakterystyce biegu
jałowego, a wierzchołki U na prostej k. Długośd dowolnego boku każdego trójkąta określa w pewnej
skali wartośd prądu obciążenia przy odpowiadającym mu napięciu. Po przeniesieniu tego napięcia i
prądu na wykres U = f(I) otrzymuje się charakterystykę zewnętrzną (rys. 11.14).
3.7
Konstrukcyjne wyznaczenie charakterystyki zewnętrznej prądnicy samowzbudnej
Charakterystykę zewnętrzną maszyny samowzbudnej wyznacza się za pomocą charakterystyki biegi
jałowego, charakterystyki U
f
= f(I
f
) oraz trójkąta charakterystycznego. Wierzchołek E trójkąta
(rys. 11.14) przesuwa się po charakterystyce biegu jałowego, a wierzchołek U po prostej U
f
= f(I
f
).
Ponieważ boki trójkąta charakterystycznego są proporcjonalne do wartości prądu, więc każdemu
położeniu trójkąta odpowiada para wartości U, I
t
przy n = const i R
f
= const. Zmieniając położenie
trójkąta, wyznacza się więc charakterystykę zewnętrzną U = f(I
t
). Charakterystyka zewnętrzna
uzyskana z pomiarów przedstawia zależnośd napięcia od prądu całkowitego I = I
t
– I
f
. Różnica ta jest
jednak niewielka, gdyż prąd wzbudzenia stanowi zaledwie kilka procent prądu znamionowego i
przebiegi pomiarowy oraz konstrukcyjny są prawie identyczne. Charakterystyczną wielkością możliwą
do uzyskania ze skonstruowanej charakterystyki jest prąd maksymalny, którego wartośd sięga
(2...3)·I
n
. Prąd zwarcia prądnicy bocznikowej jest zwykle mniejszy niż prąd znamionowy i zależy od
wartości SEM remanentu. Prąd zwarcia prądnicy obcowzbudnej jest wielokrotnie większy (rys. 11.14)
i może osiągad wartości (15...20)·I
n
. Dlatego zwarcie prądnicy bocznikowej nie jest niebezpieczne,
natomiast zwarcie prądnicy obcowzbudnej grozi jej zniszczeniem.
4
Sprawozdanie z ćwiczenia
Sprawozdanie z dwiczenia powinno zawierad:
protokół z pomiarów,
wykresy charakterystyk: biegu jałowego, zwarcia, obciążenia, zewnętrznej, regulacji,
trójkąt charakterystyczny wyznaczony z charakterystyk biegu jałowego i zwarcia,
wykres charakterystyki wewnętrznej E = f(I
f
) przy I = I
n
, n = n
n
,
wykres charakterystyki zewnętrznej dla maszyn samowzbudnej wyznaczony na podstawie
charakterystyki biegu jałowego i trójkąta charakterystycznego,
obliczenie znamionowej zmienności napięcia,
obliczenie współczynników udziałów spadków napięd magnetycznych k
i k
dla U = U
n
,
wnioski z pomiarów.
5
Pytania kontrolne
Podad warunek samowzbudzenia się prądnicy bocznikowej.
Dlaczego charakterystykę biegu jałowego wyznacza się w układzie obcowzbudnym?
Co powoduje różnice między charakterystykami biegu jałowego wyznaczonymi w układach obco-
i samowzbudnym?
Czym różni się trójkąt charakterystyczny wyznaczony z charakterystyk biegu jałowego i zwarcia
od trójkąta podczas pracy znamionowej?
Jak ocenia się stopieo nasycenia maszyny?
Co to jest znamionowa zmiennośd napięcia i jakie dopuszcza się jej odchyłki?
Jak kompensuje się rozmagnesowujące oddziaływanie twornika prądnicy?
Jakie są przyczyny różnic między przebiegami charakterystyk zewnętrznych w układzie
bocznikowym i obcowzbudnym?
43
Rys. 11.14. Konstrukcja charakterystyki zewnętrznej prądnicy samowzbudnej
44
ĆWICZENIE 12
CHARAKTERYSTYKI BOCZNIKOWEGO SILNIKA PRĄDU STAŁEGO
1
Program ćwiczenia
Pomiar rezystancji uzwojeo silnika.
Pomiar charakterystyki mechanicznej.
Pomiar charakterystyki prędkości obrotowej.
Pomiar charakterystyki regulacji.
Pomiar charakterystyki mementu rozruchowego.
Wyznaczenie charakterystyk roboczych.
2
Cel pomiarów
Dobór silnika do układu napędowego wymaga znajomości charakterystyki urządzenia napędowego i
jego warunków pracy. Zestawienie charakterystyk silnika i urządzenia napędowego pozwala na
określenie przedziału zmian prędkości, ekonomiczności regulacji prędkości obrotowej i charakteru
regulacji.
Charakterystyki silnika mierzy się po to, by określid jego przydatnośd do napędzania konkretnego
urządzenia oraz ocenid poprawnośd jego konstrukcji. Sprawdza się również zgodnośd parametrów
znamionowych z podanymi przez wytwórcę oraz spełnienie warunków stawianych przez normy.
3
Omówienie programu ćwiczenia
3.1
Pomiar rezystancji uzwojeń silnika
Rezystancje uzwojeo silnika należy zmierzyd prądem stałym (metodą techniczną) przed rozpoczęciem
pomiarów, tzn. dla maszyny nie nagrzanej. Zmierzone wartości przelicza się na umowną temperaturę
pracy.
3.2
Pomiar charakterystyki mechanicznej
Charakterystyka mechaniczna jest to zależnośd prędkości obrotowej n od prądu pobieranego przez
silnik I przy stałym napięciu U i stałej rezystancji obwodu wzbudzenia R
f
(n = f(I) przy U = U
n
= const i
R
f
= const).
Za charakterystykę mechaniczną można również uważad zależnośd prędkości obrotowej od momentu
obciążającego silnik M (n = f(M) przy U = U
n
= const i R
f
= const), gdyż między momentem i prądem
twornika I
t
I istnieje związek
(12.1)
45
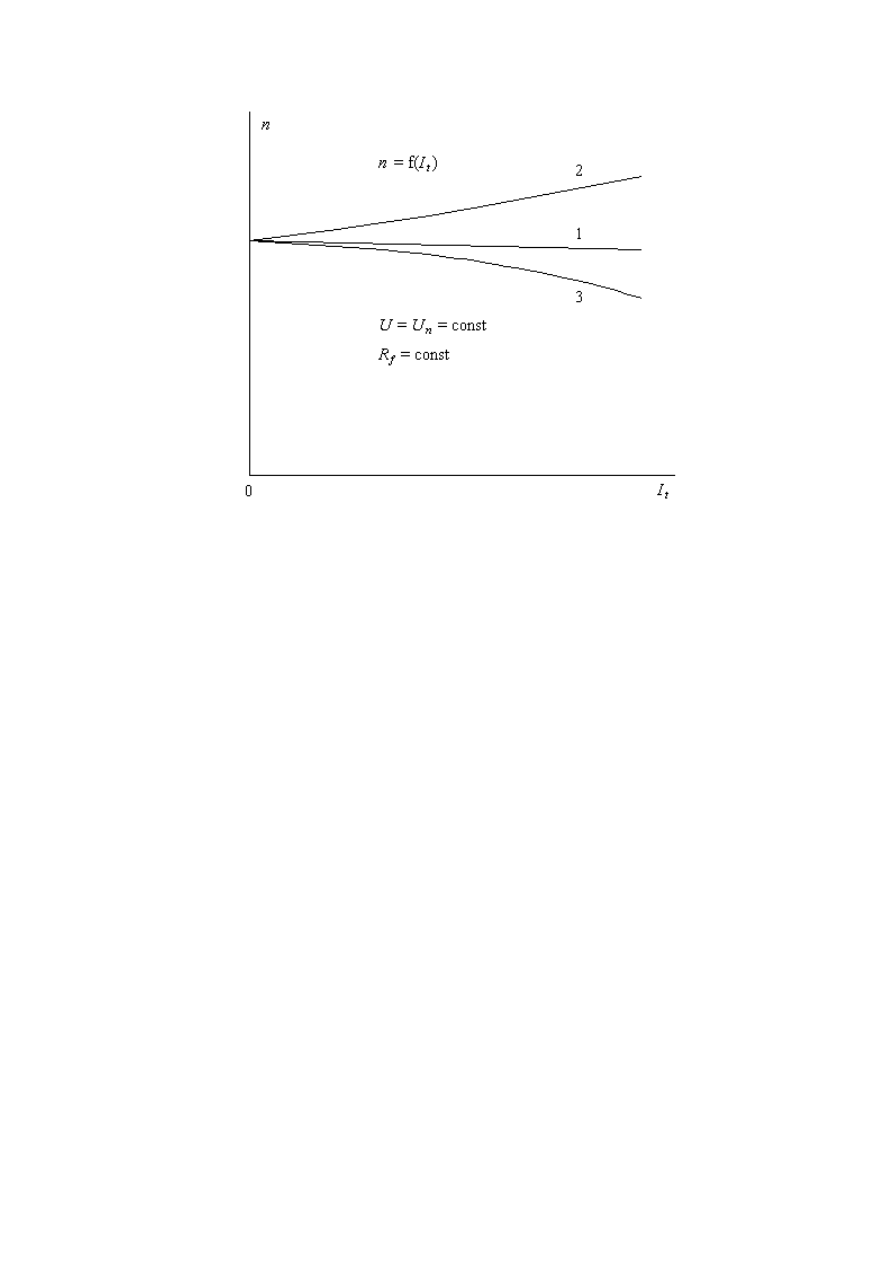
Rys. 12.1. Charakterystyka mechaniczna
Przy stałym strumieniu
(
= const), tzn. gdy brak jest oddziaływania twornika, moment jest wprost
proporcjonalny do prądu twornika. Oddziaływanie twornika w maszynach rzeczywistych jest tym
silniejsze, im większy jest prąd twornika I
t
. Zwiększenie oddziaływania twornika zmniejsza strumieo
, a tym samym zwiększa prędkośd obrotową. Zwiększenie prądu I
t
zwiększa również spadek
napięcia
U na uzwojeniach połączonych szeregowo, co przy stałym napięciu sieci zmniejsza SEM i
prędkośd obrotową. W zależności od tego, który z tych dwóch czynników ma silniejszy wpływ,
charakterystyka mechaniczna będzie rosnąca, malejąca lub niezależna od prędkości obrotowej
(rys. 12.1). Zazwyczaj prędkośd obrotowa wraz ze wzrostem obciążenia maleje (krzywa 1). Przy
dużym oddziaływaniu twornika zwiększenie obciążenia może zwiększad prędkośd obrotową
(krzywa 2). Silnik o takiej charakterystyce nie może na ogół pracowad stabilnie. Zaburzenie stanu
równowagi może spowodowad jego zatrzymanie się (po zmniejszeniu prędkości obrotowej) lub
rozbieganie się (po zwiększeniu prędkości obrotowej). Zapobiec tym zjawiskom można przez
zastosowanie dozwojenia szeregowego. Uzwojenie to, połączone szeregowo z uzwojeniem twornika i
umieszczone na biegunach głównych, wytwarza przepływ zgodny z przepływem uzwojenia
bocznikowego. Charakterystyka takiego silnika jest opadająca (krzywa 3). Dozwojenie zgodne
powiększa więc zmiennośd prędkości obrotowej, zabezpiecza silnik pracujący jałowo przed
rozbieganiem się i zmniejsza sztywnośd charakterystyki mechanicznej. Takie połączenie dozwojenia,
że jego przepływ jest skierowany przeciwnie do przepływu uzwojenia bocznikowego zwiększa
niestabilnośd maszyny.
46
Rys. 12.2. Układ do pomiaru charakterystyk mechanicznej, prędkości obrotowej i regulacji
Układ pomiarowy do wyznaczania charakterystyki zewnętrznej przedstawiono na rys. 12.2. Wał
badanego silnika jest sprzęgnięty z prądnicą hamulcową.
Pomiar rozpoczyna się od obciążenia znamionowego I = I
n
, n = n
n
. Znamionową prędkośd obrotową
uzyskuje się przez regulowanie prądu wzbudzenia opornikiem regulacyjnym R
2
w obwodzie
wzbudzenia, a znamionowy prąd przez zmianę mocy prądnicy hamulcowej. Tak ustalona rezystancja
obwodu wzbudzenia pozostaje niezmieniona przez cały czas pomiaru charakterystyki zewnętrznej.
Stopniowo zmniejszając obciążenie, należy zmierzyd około sześciu punktów charakterystyki. Wyniki
pomiarów należy zestawid w tabeli 12.1.
Tabela 12.1
Lp.
U
I
n
I
f
G
l
M
Uwagi
V
A obr/s A
N
m
N·m
U = U
n
= const
Moment obciążający oblicza się, mnożąc siłę G przez ramię l
(12.2)
Na podstawie wyników pomiaru należy wykreślid charakterystyki n = f(I) oraz n = f(M).
Charakterystyka n = f(M) pozwala wyznaczyd znamionową zmiennośd prędkości obrotowej, czyli
procentową zmianę prędkości obrotowej nagrzanego silnika po przejściu od pracy znamionowej do
47
biegu jałowego z zachowaniem stałej wartości napięcia. Zmiennośd prędkości obrotowej wyznacza
się więc ze wzoru
(12.3)
Zmiennośd prędkości dla silników bocznikowych nie powinna byd większa niż +20%, nie mniejsza
jednak niż +0,2% znamionowej prędkości obrotowej.
3.3
Pomiar charakterystyki prędkości obrotowej
Charakterystyka prędkości obrotowej jest to zależnośd prędkości obrotowej silnika n od prądu
wzbudzenia I
f
przy stałym prądzie twornika I
t
i stałym napięciu U (n = f(I
f
) przy I
t
= I
tn
= const,
U = U
n
= const).
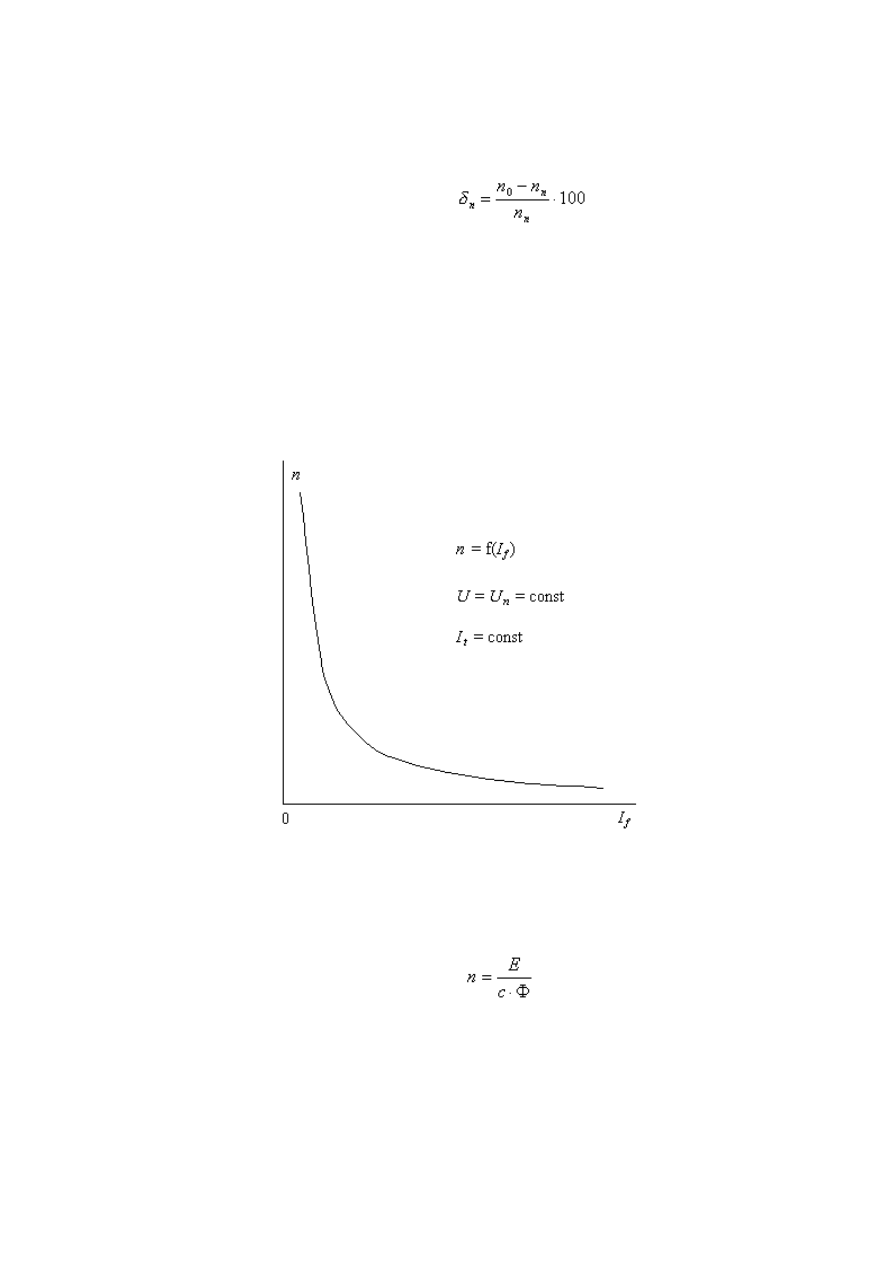
Rys. 12.3. Charakterystyka prędkości obrotowej
Przebieg charakterystyki prędkości obrotowej jest zbliżony do hiperboli o równaniu
(12.4)
Przy stałym napięciu i stałym prądzie twornika SEM twornika jest również stała. Ze zmianami prądu
wzbudzenia zmienia się strumieo
. Gdyby strumieo zależał liniowo od prądu I
f
, wówczas prędkośd
obrotowa zmieniałaby się hiperbolicznie ze zmianami prądu wzbudzenia. Nieliniowośd
charakterystyki magnesowania powoduje jednaka że przebieg charakterystyki obciążenia odbiega
nieco od hiperboli, co zilustrowano na rysunku 12.3. Pomiar charakterystyki prędkości obrotowej
48
wykonuje się w układzie przedstawionym na rysunku 12.2. Po ustaleniu napięcia znamionowego
obciąża się maszynę badaną tak, by prąd twornika osiągnął wartośd znamionową. Regulując
następnie prąd wzbudzenia od wartości maksymalnej do takiej, przy której prędkośd obrotowa
osiągnie wartośd 1,2·n
n
mierzy się około sześciu punktów pracy. W zwykłych silnikach bocznikowych
prędkośd obrotowa 1,2·n
n
jest największą dopuszczalną prędkością. W silnikach specjalnych
dopuszcza się większe zmiany prędkości. Jest to zaznaczone na tabliczkach znamionowych.
Wyniki pomiarów należy zestawid w tabeli 12.2 i następnie wykreślid charakterystykę n = f(I
f
).
Tabela 12.2
Lp.
U
I
t
I
f
n
G
M
Uwagi
V
A
A obr/s N
N·m
l = ...
3.4
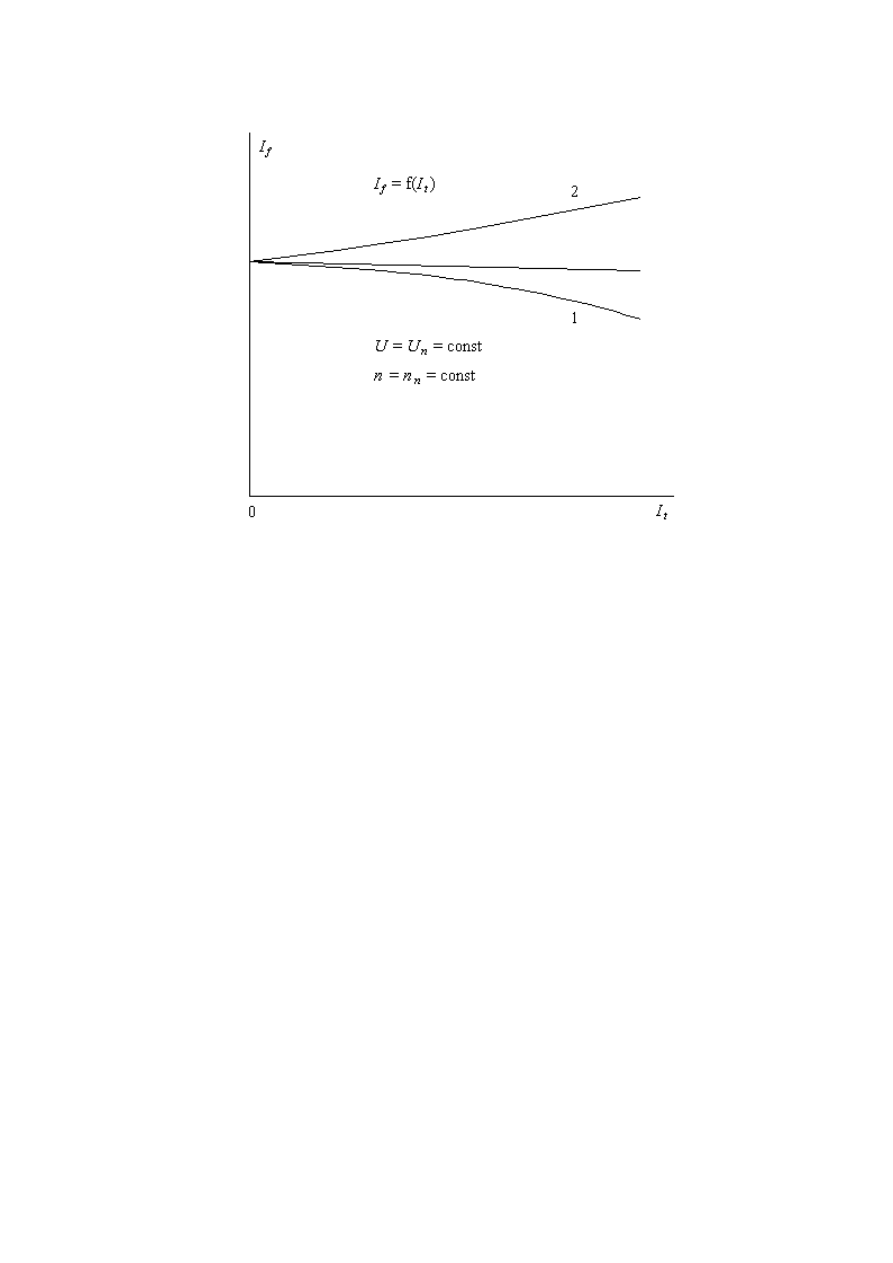
Pomiar charakterystyki regulacji
Charakterystyka regulacji informuje jak należy zmieniad prąd wzbudzenia, aby podczas zmiany
obciążenia silnika utrzymad stałą prędkośd obrotową. Jest to więc zależnośd prądu wzbudzenia I
f
od
prądu twornika I
t
, przy stałej prędkości obrotowej n oraz stałym napięciu (I
f
= f(I
t
) przy U = U
n
= const i
n = n
n
= const). Pomiary przeprowadza się w układzie przedstawionym na rysunku 12.2. Rozpoczyna
się je od znamionowego biegu jałowego (M = 0, U = U
n
, n = n
n
). Stopniowo zwiększając obciążenia
silnika (a tym samym prąd twornika) i utrzymując stałe napięcie oraz prędkośd obrotową, mierzy się
kolejne punkty charakterystyki. Maksymalny prąd twornika nie powinien przekroczyd wartości
1,25·I
tn
. Prędkośd obrotową należy utrzymywad stałą przez odpowiednie regulowanie prądu
wzbudzenia. Wyniki pomiarów zestawia się w tabeli 12.3, a na ich podstawie wykreśla się
charakterystykę regulacji I
f
= f(I
t
)
Tabela 12.3
Lp.
U
I
t
I
f
n
G
M
Uwagi
V
A
A obr/s N
N·m
l = ...m
49
Rys. 12.4. Charakterystyka regulacji
Przebiegi możliwych charakterystyk regulacji przedstawiono na rysunku 12.4. Charakterystyka
opadająca (1) jest typowa dla silników bocznikowych, charakterystyka wznosząca się (2) wskazuje na
dużą reakcję twornika lub dozwojenie połączone przeciwnie.
3.5
Pomiar charakterystyki momentu rozruchowego
Charakterystyka momentu rozruchowego jest to zależnośd momentu rozruchowego M
r
od prądu
twornika I
t
przy stałym prądzie wzbudzenia i zahamowanym wirniku silnika (M
r
= f(I
t
) przy I
f
= const i
n = 0).
50
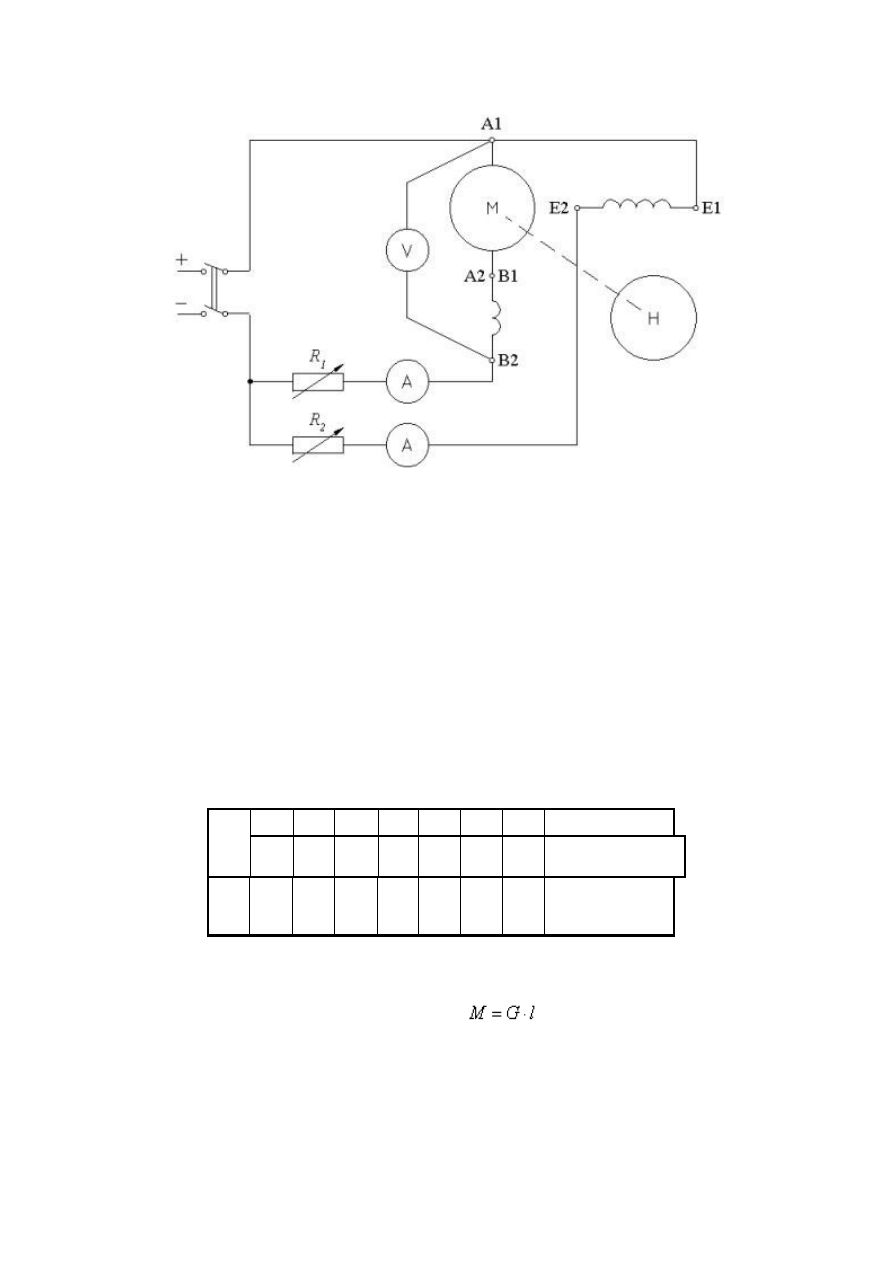
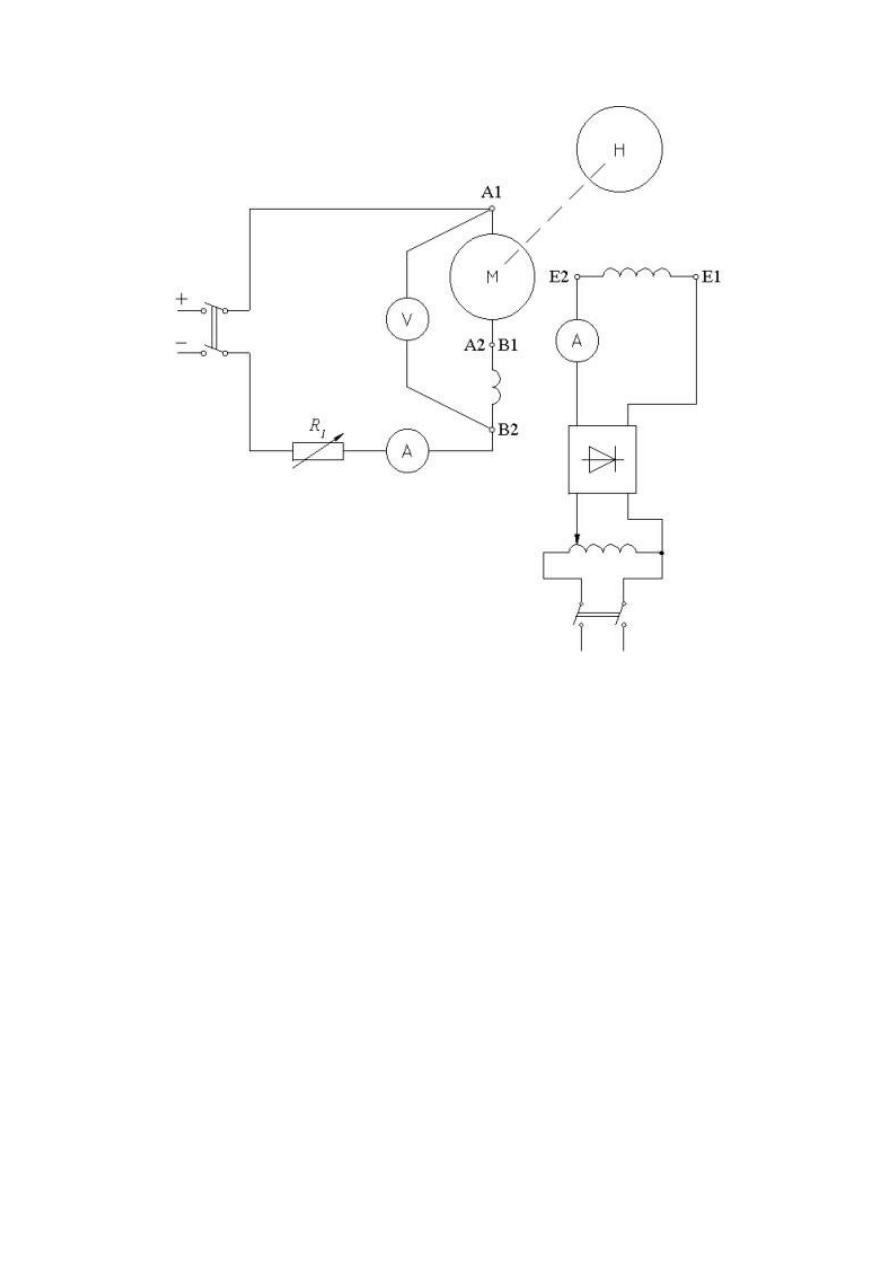
Rys. 12.5. Układ do pomiaru momentu rozruchowego
Badany silnik jest połączony zgodnie ze schematem na rysunku 12.5 i sprzęgnięty z prądnicą
hamulcową, której wirnik jest połączony sztywno ze stojanem. Moment rozruchowy jest
przekazywany na ułożyskowany stojan hamulca. Siłę wychylającą stojan prądnicy hamulcowej mierzy
dynamometr.
W nieruchomym wirniku silnika nie indukuje się SEM. Stąd koniecznośd zasilania uzwojenia twornika
napięciem obniżonym. Wskutek tego obwód wzbudzenia silnika jest zasilany z obcego źródła
napięcia. Pomiary należy wykonad dla znamionowej wartości prądu wzbudzenia I
fn
oraz 0,5·I
fn
. Po
ustaleniu wartości prądu wzbudzenia zwiększa się stopniowo napięcie zasilające twornika i uzyskuje
kolejne punkty pomiarowe. Moment rozruchowy wyznacza się na podstawie pomiaru siły działającej
na stojan hamulca. Pomiary należy wykonad dla znamionowej wartości prądu wzbudzenia. Prąd
twornika w czasie pomiarów nie powinien przekroczyd wartości 1,25·I
tn
. Pomiary należy wykonywad
szybko, ponieważ przy zahamowanym wirniku chłodzenie silnika jest niewystarczające. Wyniki
pomiarów należy zestawid w tabeli 12.4.
51
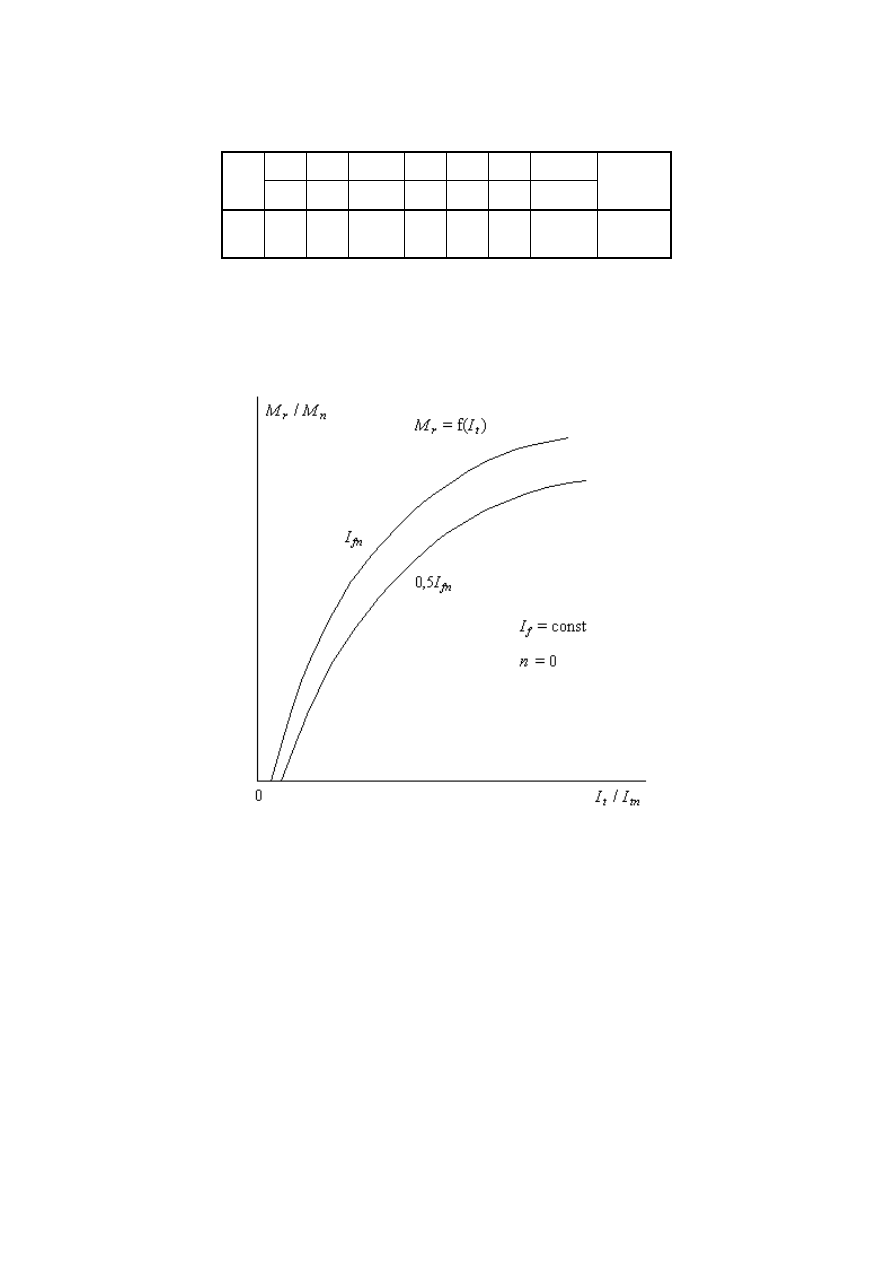
Tabela 12.4
Lp.
I
t
I
f
I
t
/ I
f
l
G
M
r
M
r
/ M
n
Uwagi
A
A
–
m
N
N·m
–
Na podstawie wyników pomiarów wykreślid charakterystyki M
r
= f(I
t
) dla obydwu wartości prądu
wzbudzenia.
Typowy przebieg charakterystyk momentu rozruchowego pokazano na rysunku 12.6.
Rys. 12.6. Charakterystyka momentów rozruchowych
3.6
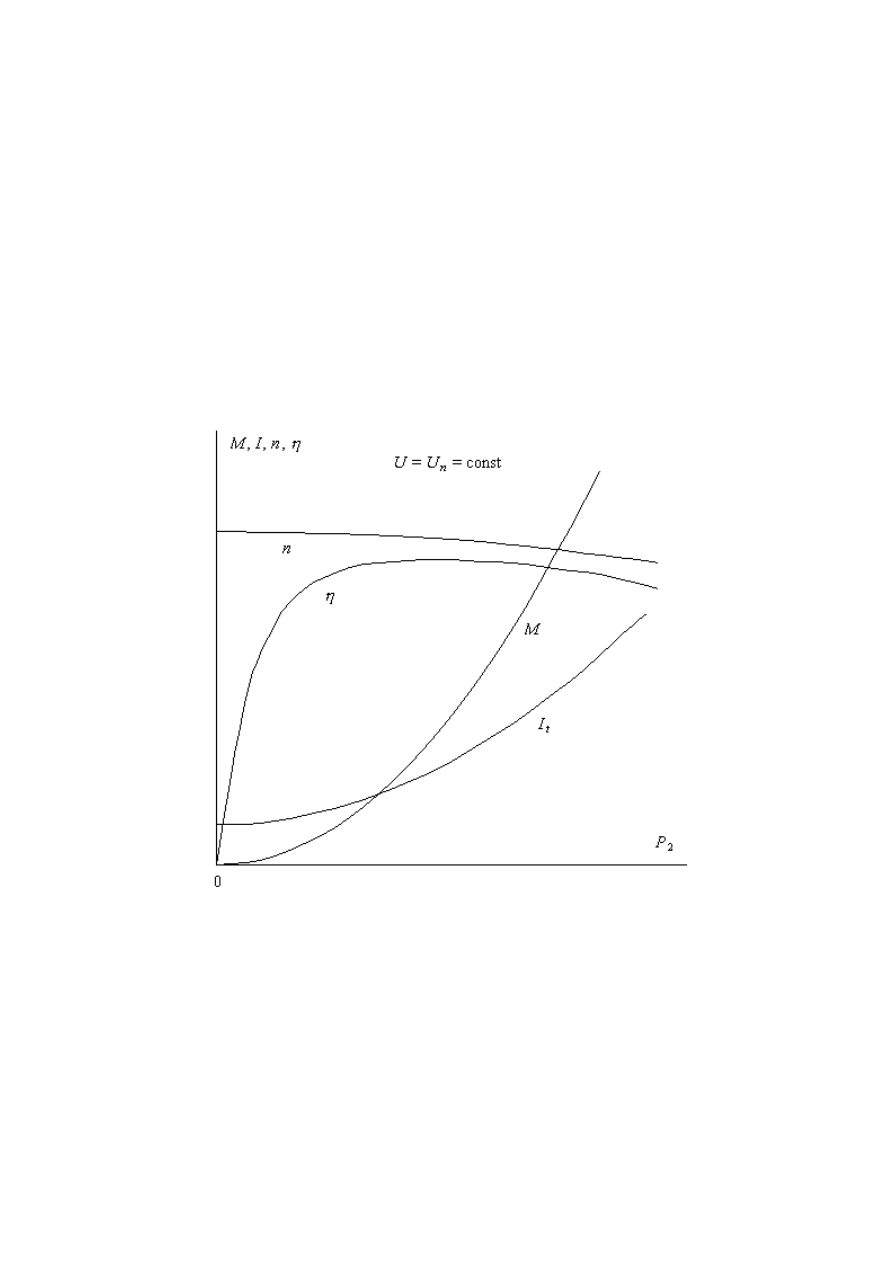
Wyznaczenie charakterystyk roboczych
Charakterystyki robocze silnika są to zależności prędkości obrotowej n, momentu M, momentu
wewnętrznego M
i
, prądu twornika I
t
i sprawności
od mocy na wale silnika P
2
, przy stałym napięciu
U i stałym prądzie wzbudzenia I
f
(n, M, M
i
, I
t
,
= f(P
2
) przy U = U
n
= const i I
f
= I
fn
= const).
Charakterystyki te wyznacza się na podstawie wyników pomiarów charakterystyki mechanicznej. Do
tabeli 12.5 należy przepisad wartości U, I
t
, n, I
f
i M z tabeli 12.1, a pozostałe wielkości obliczyd na ich
podstawie.
Tabela 12.5
52
Lp.
U
I
I
f
I
t
E
n
M
M
i
P
i
P
1
P
2
Uwagi
V
A
A
A
V
obr/s N·m N·m W
W
W
%
R
tc
= ...
e
sz
= ...
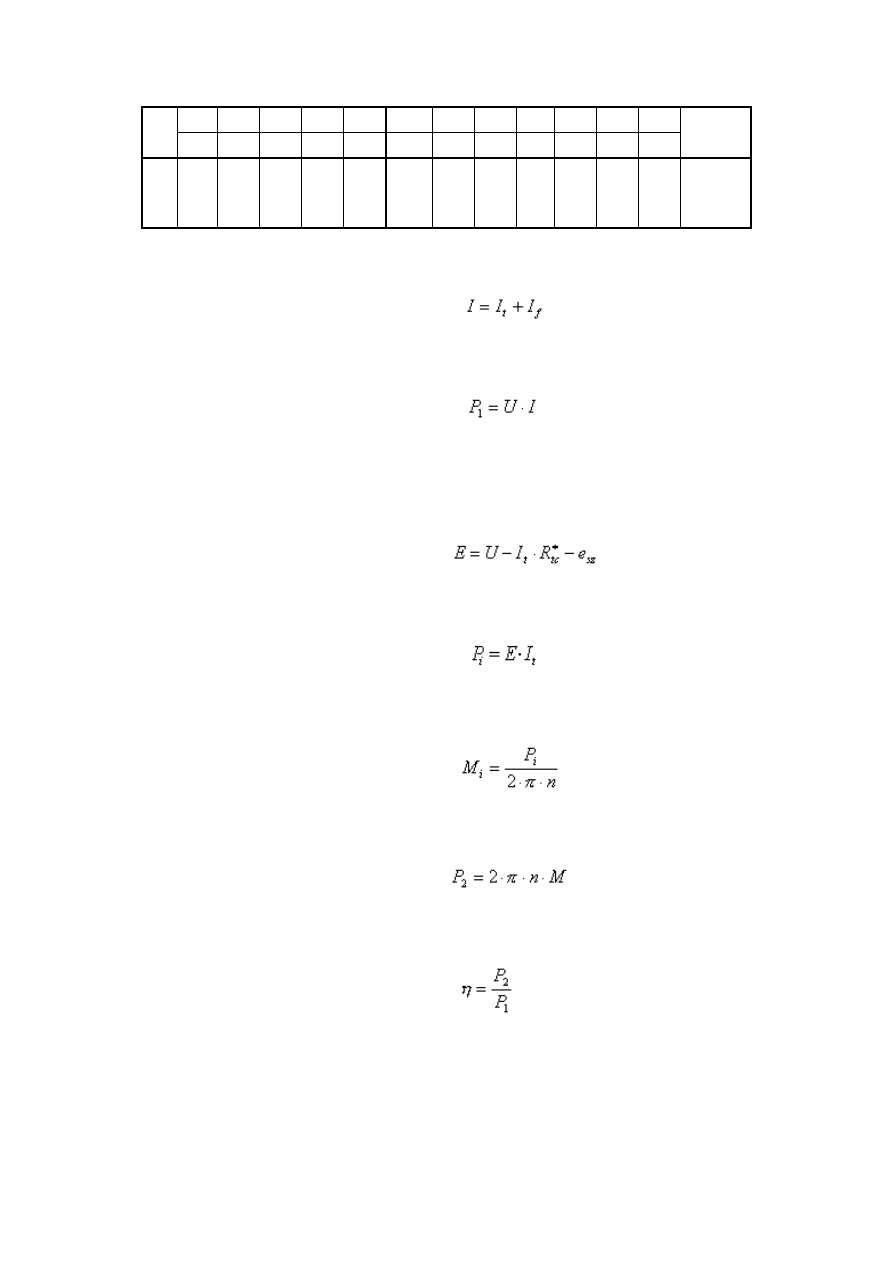
Prąd I pobierany z sieci przez silnik jest sumą prądów twornika i wzbudzenia
(12.5)
a moc pobierana iloczynem napięcia i prądu
(12.6)
SEM twornika E oblicza się odejmując od napięcia U spadki napięcia na oporach szeregowych w
obwodzie twornika R
*
tc
(przeliczonych na umowną temperaturę pracy) i spadek napięcia na
szczotkach e
sz
(12.7)
Moc wewnętrzna maszyny
(12.8)
Moment wewnętrzny
(12.9)
Moc na wale silnika
(12.10)
Sprawnośd
(12.11)
Na podstawie wyników pomiarów i obliczeo należy wykreślid charakterystyki n, M, I
t
,
= f(P
2
),
których typowe przebiegi przedstawiono na rysunku 12.7. Dla mocy znamionowej P
n
należy z
wykresów odczytad znamionową wartośd prędkości obrotowej n
n
oraz sprawności i porównad je z
wartościami podanymi przez wytwórcę.
53
4
Sprawozdanie z ćwiczenia
Sprawozdanie z dwiczenia powinno zawierad:
protokół z pomiarów,
wykresy charakterystyk zewnętrznej, obciążenia, regulacji, momentu rozruchowego i roboczych,
uwagi i wnioski.
5
Pytania kontrolne
Jak dokonuje się rozruchu silnika bocznikowego?
Omówid sposoby regulacji prędkości obrotowej w silnikach bocznikowych.
Jak dokonuje się zmiany kierunku wirowania silnika?
Kiedy i dlaczego charakterystyka regulacji jest rosnąca?
Jaki jest cel stosowanie dozwojenia szeregowego?
Omówid zjawiska występujące po przerwaniu obwodu wzbudzenia pracującego silnika.
Jak reakcja twornika wpływa na przebieg charakterystyki zewnętrznej?
Rys. 12.7. Charakterystyki robocze
54
ĆWICZENIE 13
STRATY MOCY I SPRAWNOŚĆ SILNIKA BOCZNIKOWEGO PRĄDU STAŁEGO
1
Program ćwiczenia
Pomiar rezystancji uzwojeo silnika.
Pomiar strat jałowych.
Pomiar strat mechanicznych w funkcji prędkości obrotowej.
Wyznaczenie sprawności.
2
Cel pomiarów
Sprawnośd maszyny można wyznaczyd metodą bezpośrednią lub metodą strat poszczególnych. Druga
z nich jest dokładniejsza i zalecana szczególnie do maszyn dużej mocy. Metoda strat poszczególnych
polega na pomiarowym wyznaczeniu strat jałowych i obliczeniu strat obciążeniowych. Straty jałowe
maszyny prądu stałego można wyznaczyd metodą prądnicową lub metodą silnikową, niezależnie od
tego, czy maszyna jest prądnicą czy silnikiem.
Celem dwiczenia jest wyznaczenie sprawności silnika bocznikowego prądu stałego metodą strat
poszczególnych, przy czym straty jałowe wyznacza się metodą silnikową. Wartośd znamionową
sprawności porównuje się z wartością podaną przez wytwórcę, sprawdzając czy odchyłka mieści się w
granicach podanych przez normę. Dopuszczalne odchyłki sprawności zależą od metody pomiaru i
mocy maszyny.
3
Omówienie programu ćwiczenia
3.1
Pomiar rezystancji uzwojeń silnika
Rezystancja uzwojeo w obwodzie twornika maszyny zimnej (w temperaturze otoczenia) należy
zmierzyd metodą techniczną, a następnie przeliczyd zmierzoną wartośd na umowną temperatura
pracy.
3.2
Pomiar strat jałowych
Straty mocy w maszynie prądu stałego można podzielid na: mechaniczne, podstawowe w rdzeniu,
podstawowe w uzwojeniach obwodu twornika, przejścia szczotka – komutator, w uzwojeniu
wzbudzenia oraz dodatkowe w uzwojeniu i rdzeniu.
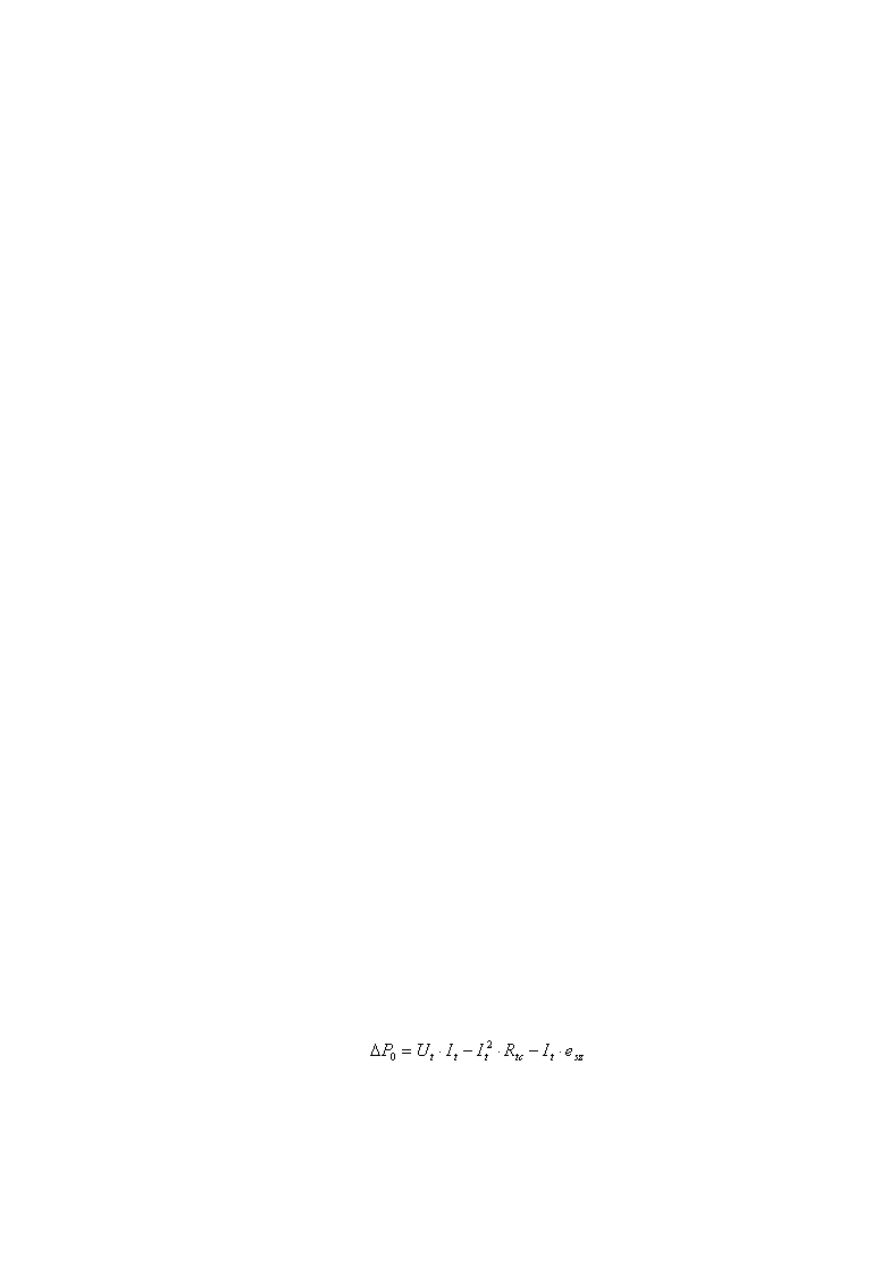
Suma strat mechanicznych
P
m
i strat w rdzeniu
P
Fe
stanowi straty jałowe
P
0
. Wyznacza się je z
mocy pobieranej przy biegu jałowym przez odjęcie strat obciążeniowych wywołanych prądem I
t
biegu
jałowego
(13.1)
Pomiary wykonuje się w układzie przedstawionym na rys. 13.1. Po uruchomieniu silnika zmienia się
napięcie twornika w granicach od 1,3·U
n
do takiej wartości, przy której przez regulację prądu
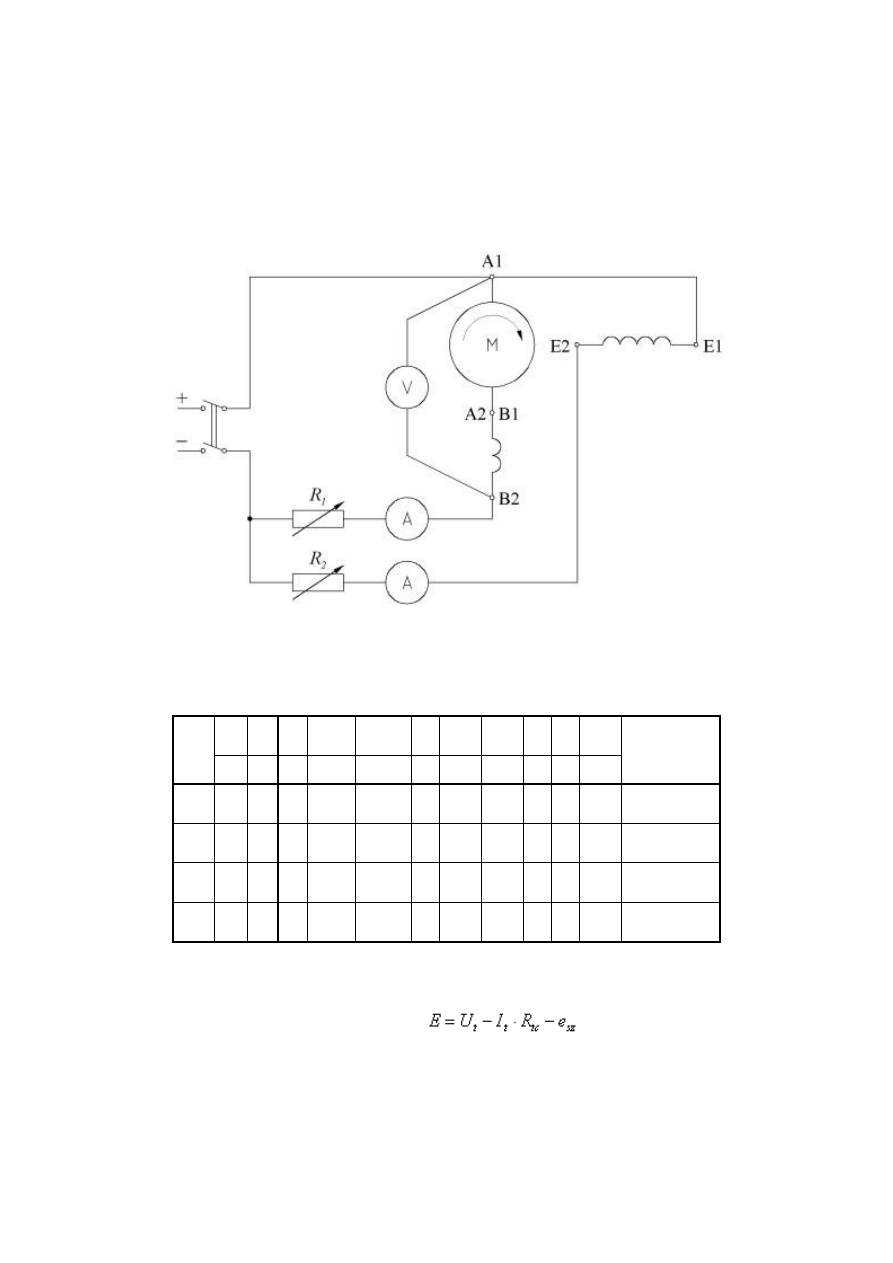
55
wzbudzenia można jeszcze utrzymad stałą prędkośd obrotową. Kolejne punkty pomiarowe ustala się
przez obniżanie napięcia opornikiem w obwodzie twornika. Prędkośd obrotowa wówczas zmniejsza
się. Przez zmniejszenie prądu wzbudzenia zwiększa się prędkośd do poprzedniej zadanej wartości.
Pomiary należy wykonad dla znamionowej prędkości obrotowej n
n
= const, a wyniki zestawid w tabeli
13.1.
Rys. 13.1. Układ połączeo do pomiaru strat jałowych
Tabela 13.1
Lp.
U
t
I
t
I
f
I
t
·R
tc
I
t
2
·R
tc
e
sz
I
t
·e
sz
P
0
E
E
2
P
m
Uwagi
V
A
A
V
W
V
W
W
V V
2
W
n = n
n
n = 1,2·n
n
n = 0,8·n
n
n = 0,6·n
n
Straty jałowe oblicza się ze wzoru 13.1, a SEM E z zależności
(13.2)
Prąd biegu jałowego jest niewielki w stosunku do prądu znamionowego, można więc przyjąd, że
uzwojenie nie nagrzewa się i ma temperaturę otoczenia. W obliczeniach
P
0
i E należy użyd wartości
R
tc
maszyny zimnej. Trzeba też zwrócid uwagę na fakt, że jeśli prąd jest mniejszy od 0,25 I
n
, to spadek
napięcia na oporze przejścia szczotka – komutator zmienia się liniowo w funkcji prądu.
56
Obliczone straty jałowe i SEM umożliwiają sporządzenie charakterystyki strat jałowych
P
0
= f(E) (rys.
13.2) oraz rozdzielenie ich na straty mechaniczne i straty w rdzeniu (w żelazie).
Metoda silnikowa pomiaru strat jałowych nie pozwala na wykonanie pomiarów dla zbyt niskich
napięd, gdyż nie można wówczas utrzymad stałej prędkości obrotowej. Aby wyznaczyd straty
mechaniczne, należy określid straty jałowe przy E = 0. W tym celu ekstrapoluje się krzywą
P
0
= f(E)
do przecięcia z osią rzędnych. Charakterystyka
P
0
= f(E) zbliżona jest do paraboli. Wykreślając
zależnośd strat
P
0
od E
2
, uzyskuje się linię prostą. Ekstrapolacja prostej do osi rzędnych wyznacza
początkowy punkt charakterystyki strat jałowych, a więc wartośd strat mechanicznych
P
m
. Aby
dokładnie wyznaczyd te straty, należy wykonad około 12 pomiarów.
Rys. 13.2. Straty jałowe
3.3
Pomiar strat mechanicznych w zależności od prędkości obrotowej
Straty mechaniczne w maszynie prądu stałego składają się ze strat tarcia w łożyskach, strat
wentylacyjnych i strat tarcia szczotek o komutator. Straty wentylacyjne to straty tarcia wirnika o
czynnik chłodzący (najczęściej powietrze) oraz straty w wentylatorze. Straty tarcia w łożyskach są dla
łożysk ślizgowych proporcjonalne do
, a dla łożysk tocznych do n. Straty tarcia szczotek o
komutator są proporcjonalne do n, a straty wentylacyjne do n
3
. Straty mechaniczne nie zależą od
obciążenia i przy stałej prędkości obrotowej maszyny mają wartośd stałą.
57
Rys. 13.3. Straty mechaniczne
Pomiary charakterystyk strat jałowych dla różnych prędkości obrotowych umożliwiają wyznaczenie
zależności strat mechanicznych od prędkości obrotowej. W dwiczeniu należy wykonad pomiary dla
prędkości n = (0,6; 0,8; 1,0; 1,2)·n
n
, wyznaczyd straty mechaniczne i wykreślid charakterystykę
P
m
= f(n) (rys. 13.3). Pomiary wykonuje się w układzie przedstawionym na rys. 13.1, a ich wyniki
zestawia w tabeli 13.1.
3.4
Wyznaczenie sprawności
Sprawnośd silnika jest stosunkiem mocy na wale do mocy pobranej z sieci. Moc pobrana jest to
iloczyn napięcia i prądu twornika, natomiast moc oddana jest różnicą mocy pobranej i całkowitych
strat mocy. Tak więc sprawnośd
(13.3)
Straty całkowite P
c
są sumą strat jałowych, obciążeniowych i wzbudzenia
(13.4)
Straty jałowe wyznacza się z charakterystyki
P
0
= f(E). Straty obciążeniowe składają się ze strat
podstawowych
(13.5)
i dodatkowych, które dla maszyn bez uzwojeo kompensacyjnych wynoszą
58
(13.6)
a dla maszyn z uzwojeniami kompensacyjnymi
(13.7)
Straty wzbudzenia oblicza się ze wzoru
(13.8)
Prąd silnika jest sumą prądu twornika i prądu wzbudzenia
(13.9)
Zależnośd prądu wzbudzenia od prądu twornika określa charakterystyka regulacyjna I
f
= f(I
t
) przy
U = U
n
= const i n = n
n
= const (dwiczenie 12).
Badany silnik powinien mied wyznaczoną charakterystykę regulacyjną (jak w dwiczeniu 12).
Sprawnośd należy obliczyd dla napięcia U = U
n
= const, prędkości obrotowej n = n
n
= const i prądów
I = (0,25; 0,50; 0,75; 1,0; 1,25) I
n
. Wyniki zestawid w tabeli 13.2.
Tabela 13.2
U
t
= U
n
, n = n
n
Lp.
I I
t
I
f
e
sz
E
P
0
I
t
2
·R
*
tc
I
t
·e
sz
P
obcp
P
dod
P
obc
P
f
P
c
P
2
Uwagi
A A A
V
V
W
W
W
W
W
W
W
W
W %
Na podstawie wyników obliczeo należy wykreślid charakterystyki
,
P
c
,
P
0
,
P
obc
,
P
f
= f(P
2
) (rys.
13.4) i porównad obliczoną sprawnośd dla obciążenia znamionowego z wartością sprawności podaną
przez wytwórcę.
59
Rys. 13.4. Straty mocy i sprawnośd silnika
4
Sprawozdanie z ćwiczenia
Sprawozdanie z dwiczenia powinno zawierad:
protokół z pomiarów,
wykresy strat jałowych w funkcji E i E
2
dla prędkości obrotowych n = (0,6; 0,8; 1,0; 1,2) n
n
,
wykres strat mechanicznych w funkcji prędkości obrotowej
P
m
= f(n),
wykresy sprawności i strat w funkcji mocy oddawanej,
ocenę sprawności maszyny.
5
Pytania kontrolne
Sklasyfikowad straty mocy w maszynie prądu stałego.
Jakie czynniki wywołują straty mechaniczne i jak te straty zależą od prędkości?
Opisad sposób wyznaczania strat mechanicznych silnika.
Omówid sposoby wyznaczania sprawności i ocenid ich dokładnośd.
Wymienid przyczyny pojawiania się strat dodatkowych w uzwojeniu i rdzeniu.
Jakie straty nie zależą od obciążenia i dlaczego?
Jakie zjawiska powodują powstawanie strat w żelazie?
60
ĆWICZENIE 14
STRATY MOCY I SPRAWNOŚĆ PRĄDNICY BOCZNIKOWEJ PRĄDU STAŁEGO
1
Program ćwiczenia
Pomiar rezystancji uzwojeo.
Wyznaczenie strat jałowych przy pracy prądnicowej.
Podział strat w żelazie na straty histerezowe i wiroprądowe.
Wyznaczenie sprawności.
2
Cel ćwiczenia
Sprawnośd maszyny wyznacza się, by stwierdzid, czy wartośd podana przez wytwórcę mieści się w
granicach określonych przez normę. Wyznaczając sprawnośd maszyny w szerokim przedziale zmian
obciążenia, można określid obszar ekonomicznej pracy maszyny. Sprawnośd można wyznaczad
metodą bezpośrednią, przez pomiar mocy oddawanej i pobieranej, lub metodą pośrednią polegającą
na wyznaczeniu wszystkich składników strat mocy. Druga z nich, zwana metodą strat poszczególnych,
jest dokładniejsza dla maszyn średniej i dużej mocy, dlatego jest zalecana przez normy. Jedyną próbą
jaką trzeba wykonad, posługując się tą metodą, jest próba biegu jałowego. Można ją wykonad przy
pracy prądnicowej lub silnikowej. W dwiczeniu pomiary przeprowadza się przy pracy prądnicowej.
Dodatkowo mierzy się straty w żelazie dla stałej wartości indukcji i zmieniającej się prędkości
obrotowej. Pomiary te umożliwiają rozdzielenie strat w żelazie na straty wiroprądowe i histerezowe.
3
Omówienie programu ćwiczenia
3.1
Pomiar rezystancji uzwojeń
Rezystancję uzwojeo badanej prądnicy oraz silnika napędzającego mierzy się metodą techniczną dla
maszyn zimnych. Zmierzone wartości należy przeliczyd na umowną temperaturę pracy.
3.2
Pomiar strat jałowych
Straty jałowe mierzy się w układzie przedstawionym na rysunku 14.1. Obcowzbudna prądnica prądu
stałego napędzana jest przez pomocniczy silnik prądu stałego. Moc znamionowa silnika
napędzającego powinna byd porównywalna z wartością strat jałowych badanej prądnicy. Zbyt duża
moc silnika może byd przyczyną znacznych błędów pomiaru. Moc pobierana przez twornik silnika P
ts
jest zużywana na pokrycie strat jałowych P
0
obu maszyn oraz strat obciążeniowych silnika P
obcs
.
Stąd straty jałowe prądnicy
(14.1)
Z zależności (l4.l) wynika, że wyznaczenie strat jałowych prądnicy wymaga znajomości strat jałowych
silnika napędzającego. Pomiary strat jałowych silnika przeprowadza się po rozprzęgnięciu maszyn, w
sposób omówiony w dwiczeniu 13. Straty jałowe prądnicy mierzy się przy stałej prędkości obrotowej
n = n
n
= const. Zmieniając prąd wzbudzenia prądnicy od zera do takiej wartości, przy której SEM
61
prądnicy osiągnie wartośd 1,3·U
n
, mierzy się prąd twornika I
ts
, napięcie twornika silnika U
ts
, SEM
prądnicy E
p
oraz prąd wzbudzenia prądnicy I
fp
. Wyniki pomiarów należy zestawid w tabeli 14.1.
Rys. 14.1. Układ połączeo do pomiaru strat jałowych
Tabela 14.1
Lp.
U
ts
I
ts
I
fp
E
p
e
sz
I
ts
·R
tcs
E
s
P
0s
P
ts
P
obcs
P
0p
Uwagi
V A A V V
V
V
W
W
W
W
Moc pobieraną przez silnik P
ts
oblicza się ze wzoru
(14.2)
Straty jałowe silnika
P
0s
odczytuje się z charakterystyki
P
0s
= f(E
s
) dla wartości E
s
obliczonej z
zależności
(14.3)
w której R
tcs
– suma rezystancji uzwojeo w obwodzie twornika silnika,
e
sz
– spadek napięcia na szczotkach.
Straty obciążeniowe silnika
P
obcs
oblicza się ze wzoru
(14.4)
62
Na podstawie obliczonych wartości strat jałowych prądnicy należy sporządzid wykres
P
0p
= f(E
p
).
Straty jałowe, odpowiadające E
p
= 0, są równe stratom mechanicznym prądnicy (rys. 14.2).
3.3
Podział strat w żelazie na straty histerezowe i wiroprądowe
Straty w żelazie zalezą od wartości indukcji magnetycznej B i częstotliwości przemagnesowania f. Na
straty w żelazie składają się straty histerezowe proporcjonalne do prędkości obrotowej oraz straty
wiroprądowe zależne od kwadratu prędkości
(14.5)
Współczynniki K
h
i K
w
przy stałej indukcji są stałe.
Rys. 14.2. Straty jałowe prądnicy
63
Rys. 14.3. Podział strat w żelazie na wiroprądowe i histerezowe
Mierząc straty w żelazie przy stałej indukcji i zmieniającej się prędkości obrotowej maszyny, można
wyznaczyd współczynniki K
h
i K
w
, a tym samym podzielid straty na histerezowe i wiroprądowe. W tym
celu należy sporządzid wykres
P
Fe
/ n = f(n) i odczytad z niego wartości K
h
i K
w
·n (rys. 14.3).
W czasie pomiaru strat indukcja powinna byd stała i mied wartośd znamionową. Indukcja
znamionowa to wartośd, która przy znamionowej prędkości obrotowej indukuje w uzwojeniu
twornika badanej prądnicy znamionową SEM określoną zależnością
(14.6)
Pomiary wykonuje się w układzie przedstawionym na rys. 14.1 w dwóch kolejnych próbach. Próba
pierwsza ma na celu wyznaczenie sumy strat mechanicznych prądnicy
P
mp
i strat jałowych silnika
P
0s
w zależności od prędkości obrotowej. Przed przystąpieniem do próby należy ustalid prąd
wzbudzenia silnika I
fs
, przy którym zarówno prędkośd obrotowa prądnicy, jak i jej SEM osiągają
wartości znamionowe. Tak ustalona wartośd prądu wzbudzenia silnika powinna byd stała w czasie
wszystkich pomiarów w obu próbach.
Próbę pierwszą przeprowadza się przy niewzbudzonej prądnic. Zmieniając napięcie twornika silnika,
uzyskuje się zmianę prędkości obrotowej. Należy zmierzyd prąd i napięcie twornika silnika, a wyniki
zestawid w tabeli 14.2.
64
Tabela 14.2
Lp.
U
ts
I
ts
E
p
e
sz
P
ts
I
ts
2
·R
tcs
I
t
·e
sz
P
obcs
P
ts
–
P
obcs
Uwagi
V A V V W
W
W
W
W
próba 1
próba 2
Moc pobierana przez silnik P
ts
= U
ts
·I
ts
jest sumą strat jałowych i obciążeniowych silnika i strat
mechanicznych prądnicy. Szukana suma strat
(14.7)
Straty obciążeniowe silnika P
obcs
oblicza się ze wzoru (l4.4), uwzględniając zmianę spadku napięcia
na szczotkach e
sz
ze zmianą prądu twornika I
ts
.
Próba druga ma na celu wyznaczenie sumy strat jałowych prądnicy i silnika w zależności od prędkości
obrotowej, przy stałej indukcji. Próbę rozpoczyna się od ustalenia prądu wzbudzenia prądnicy, przy
którym indukcja w prądnicy ma wartośd znamionową. Ustala się go przy znamionowej prędkości
prądnicy tak, by napięcie na otwartych zaciskach twornika prądnicy było równe znamionowej SEM,
obliczonej z zależności (14.6). Tak ustalony prąd wzbudzenia prądnicy pozostaje w czasie próby stały.
Przez zmianę (jak poprzednio) napięcia twornika zmienia się prędkośd i odczytuje wartośd napięcia
U
ts
i prądu I
ts
.
Wyniki pomiarów należy zestawid w tabeli 14.2.
Moc pobierana przez silnik P
ts
= U
ts
·I
ts
jest zużywana na straty jałowe w obu maszynach i straty
obciążeniowe w silniku. Szukaną sumę strat mocy wyznacza się więc ze wzoru
(14.8)
Po wykonaniu obliczeo należy wykreślid na wspólnym wykresie charakterystyki
P
0s
+
P
mp
= f(n) oraz
P
0s
+
P
0p
= f(n). Straty jałowe prądnicy
P
0p
są sumą strat w żelazie
P
Fep
i strat mechanicznych
P
mp
. Różnice między wykreślonymi charakterystykami wyznaczają więc zależnośd strat w żelazie od
prędkości (rys. 14.4).
65
Rys. 14.4. Wyznaczanie strat w żelazie
Rys. 14.5. Zależnośd strat w żelazie od prędkości obrotowej
Obliczając dla poszczególnych prędkości stosunek
P
Fe
/ n, należy sporządzid wykres
P
Fe
/ n = f(n)
przedstawiony na rysunku 14.3. Wykres ten umożliwia określenie iloczynu K
w
·n oraz K
h
dla dowolnej
prędkości obrotowej.
66
Wyznaczenie współczynników K
w
i K
h
umożliwia obliczenie strat histerezowych
(14.9)
oraz strat wiroprądowych
(14.10)
w funkcji prędkości obrotowej (rys. 14.5).
3.4
Wyznaczenie sprawności prądnicy
Sprawnośd prądnicy jest stosunkiem mocy oddawanej P
2
do pobieranej P
1
. Ponieważ moc pobierana
jest równa sumie mocy oddawanej i strat mocy w maszynie, więc sprawnośd można obliczyd ze wzoru
(14.11)
Zależnośd sprawności od mocy oddawanej P
2
= U
n
·I należy wyznaczyd dla znamionowego napięcia i
znamionowej prędkości obrotowej. Po przyjęciu wartości prądu prądnicy I = (0,25; 0,50; 0,75; 1,0;
1,25)·I
n
oblicza się lub wyznacza z wykresu poszczególne straty mocy. Straty całkowite
(14.12)
Straty jałowe odczytuje się z wykresu
P
0
= f(E) (rys. 14.2) dla
(14.13)
Straty wzbudzenia wynikają z prądu wzbudzenia I
f
i napięcia na zaciskach tego uzwojenia U
f
. W
prądnicy samowzbudnej napięcie U
f
= U
n
, a prąd I
f
= I – I
t
. Prąd wzbudzenia I
f
odczytuje się z
charakterystyki regulacji I
f
= f(I), dla danej wartości I. Charakterystyka regulacji badanej maszyny
zostanie udostępniona dwiczącym.
Straty obciążeniowe są sumą strat podstawowych
P
obcp
i strat dodatkowych
P
obcd
. Straty
podstawowe
(14.14)
gdzie: R
*
tc
– rezystancja obwodu twornika przeliczona na umowną temperaturę pracy.
Straty dodatkowe dla maszyn bez uzwojenia kompensacyjnego szacuje się ze wzoru
67
(14.15)
a dla maszyn z uzwojeniem kompensacyjnym
(14.16)
Obliczenia sprawności należy wykonad posługując się tabelą 14.3.
Tabela 14.3
Lp.
I
I
t
I
f
e
sz
I
t
·R
tc
E
P
0
P
obcd
I
t
2
·R
*
tc
I
t
·e
sz
P
obc
P
f
P P
2
Uwagi
A A A V
V
V
`W
W
W
W
W
W
W W –
Rys. 14.6. Straty mocy i sprawnośd prądnicy

68
4
Sprawozdanie z ćwiczenia
Sprawozdanie z dwiczenia powinno zawierad:
protokół z pomiarów,
wykres strat jałowych
P
0p
= f(E),
wykresy strat histerezowych i wiroprądowych w funkcji prędkości obrotowej
P
Feh
,
P
Few
= f(n),
wykresy strat i sprawności
,
P
0
,
P
f
,
P
obc
,
P
c
= f(P
2
) przy U = U
n
, n = n
n
(rys. 14.6),
ocenę sprawności.
5
Pytania kontrolne
Omówid straty mocy występujące w maszynie prądu stałego.
Czym różnią się straty biegu jałowego od strat jałowych?
Jak dzielą się straty w żelazie i od czego zależą?
Omówid metodę podziału strat jałowych na straty mechaniczne i straty w żelazie.
Omówid sposób podziału strat w żelazie na straty wiroprądowe i straty histerezowe.
Na czym polega metoda wyznaczania sprawności zwana metodą strat poszczególnych?
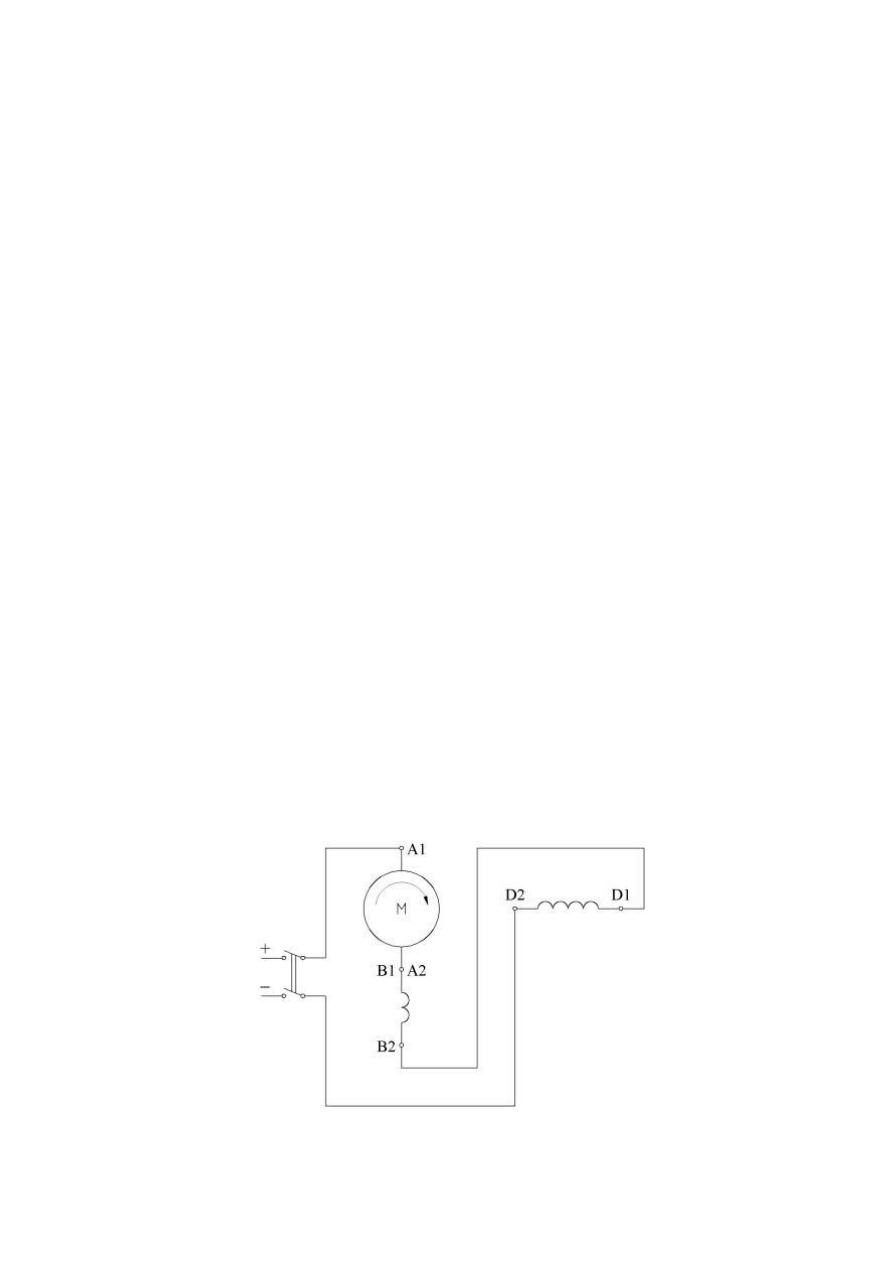
69
ĆWICZENIE 15
CHARAKTERYSTYKI SILNIKA SZEREGOWEGO
1
Program ćwiczenia
Pomiar charakterystyk zewnętrznych.
Pomiar charakterystyki regulacyjnej.
Pomiar charakterystyk n = f(U
t
) przy I
t
= const.
Wyznaczenie charakterystyk roboczych.
2
Cel ćwiczenia
Celem dwiczenia jest poznanie układu połączeo, cech eksploatacyjnych, sposobów rozruchu i
regulacji prędkości obrotowej silnika szeregowego prądu stałego. Sprawdza się również zgodnośd
danych znamionowych podanych przez wytwórca z uzyskanymi z pomiarów.
Silniki szeregowe prądu stałego charakteryzują się dużym momentem rozruchowym oraz znacznym
wpływem obciążenia na prędkośd obrotową. Brak obciążenia silnika grozi rozbieganiem się maszyny.
Dlatego silniki szeregowe należy łączyd z napędzanymi przez nie maszynami za pomocą sprzęgieł
nierozłącznych lub przekładni zębatych, a nie za pomocą przekładni pasowych. Spadnięcie lub
zerwanie pasa może spowodowad zniszczenie maszyny i stworzyd zagrożenie dla obsługi.
Na tabliczce znamionowej silnika szeregowego powinna byd podana największa dopuszczalna
prędkośd obrotowa n
max
. Silniki takie powinny byd poddane przez wytwórcę próbie wytrzymałości
mechanicznej przy prędkości 1,2·n
max
, jednak nie mniejszej niż 1,5·n
n
.
3
Omówienie programu ćwiczenia
3.1
Wiadomości wstępne
Układ połączeo silnika szeregowego prądu stałego przedstawiono na rysunku 15.1. Zaciski
szeregowego uzwojenia wzbudzenia oznaczono przez D1 – D2.
Rys. 15.1. Układ połączeo silnika szeregowego
70
Prędkośd obrotowa maszyny prądu stałego opisana jest zależnością:
(15.1)
Siła elektromotoryczna twornika silnika E wynika z napięcia zasilania U
t
i spadków napięd
(15.2)
Przy pominięciu nasycenia obwodu magnetycznego strumieo magnetyczny jest proporcjonalny do
prądu wzbudzenia I
f
. W silniku szeregowym prąd wzbudzenia jest równy prądowi twornika, więc
(15.3)
Po uwzględnieniu (15.1)–(15.3) otrzymuje się
(15.4)
Ze wzoru (15.4) wynikają możliwości regulacji prędkości silnika szeregowego. Możliwa jest zmiana
prędkości przez zmianę napięcia lub przez zmianę prądu twornika. Prędkośd obrotową można
również regulowad przez bocznikowanie uzwojenia wzbudzenia (rys. 15.2). Częśd prądu twornika
płynie przez opornik bocznikujący i prąd wzbudzenia jest mniejszy od prądu twornika (I
f
I
t
).
Uzyskuje się wówczas wzrost prędkości tym większy, im mniejszy jest prąd wzbudzenia.
Zmiana prądu twornika oznacza zmianę obciążenia silnika, zatem wyrażenie (15.4) pokazuje
zależnośd prędkości obrotowej od obciążenia. Brak obciążenia, czyli mała wartośd prądu twornika,
prowadzi do znacznego zwiększenia prędkości obrotowej, niebezpiecznego dla maszyny i obsługi.
Zjawisko to nosi nazwę „rozbiegania się” silnika. Istnieją jednak sytuacje, w których konieczne jest
załączenie silnika nieobciążonego, np. próba biegu jałowego, sprawdzenie kierunku wirowania
silnika. W takich przypadkach należy zasilad uzwojenie wzbudzenia z obcego źródła lub uruchamiad
silnik przy znacznie obniżonym napięciu.
3.2
Pomiar charakterystyk zewnętrznych
Charakterystyka zewnętrzna silnika, zwana również charakterystyką mechaniczną, jest to zależnośd
prędkości obrotowej n od prądu twornika I
t
lub momentu M, przy stałym napięciu zasilania U
t
(n = f(I
t
) lub n = f(M) przy U
t
= const).
Pomiary charakterystyk zewnętrznych wykonuje się w układzie przedstawionym na rys. 15.2. Należy
wyznaczyd charakterystyki dla trzech wartości stosunku prądu wzbudzenia do prądu twornika
I
f
/ I
t
= 1,0; 0,9; 0,8.
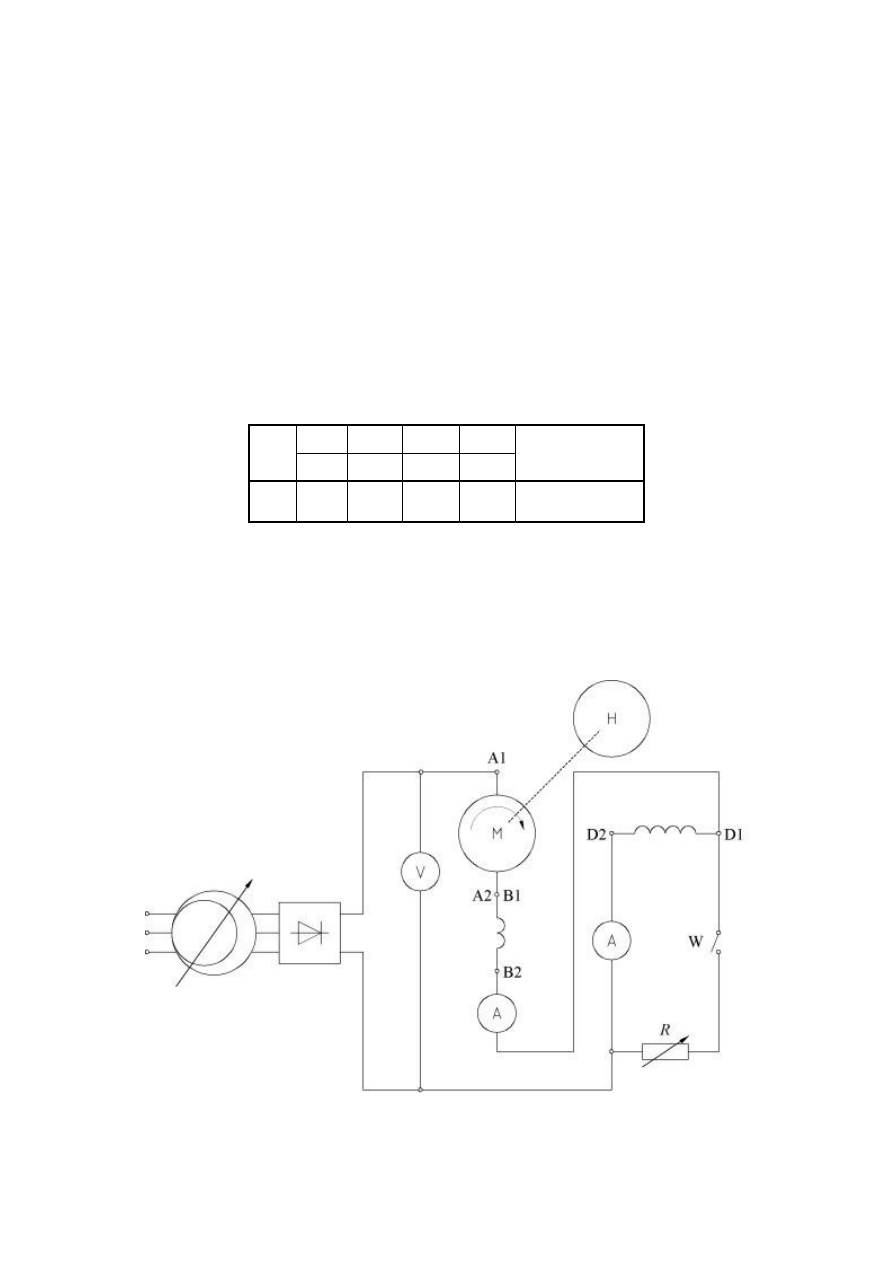
71
Badany silnik sprzęgnięty jest z pierścieniowym silnikiem indukcyjnym pracującym jako maszyna
hamulcowa.
Przed uruchomieniem silnika szeregowego należy upewnid się czy kierunki wirowania wirników obu
maszyn są przeciwne. W tym celu należy załączyd każdą z nich na krótką chwilę przy obniżonym
napięciu. Po stwierdzeniu, że maszyny wirują przeciwnie załącza się silnik szeregowy przy napięciu
bliskim zeru. Zwiększając wolno napięcie uruchamia się silnik. Załączając teraz silnik indukcyjny z dużą
rezystancją w obwodzie wirnika, obciąża się niewielkim momentem silnik szeregowy. Zwiększając
stopniowo napięcie silnika badanego i zmniejszając równocześnie rezystancję w obwodzie wirnika
maszyny indukcyjnej, uzyskuje się znamionowe napięcie, znamionową prędkośd obrotową i
znamionowe obciążenie.
Tabela 15.1
Lp.
I
t
n
M
I
f
/ I
t
Uwagi
A
obr/s
N·m
–
U = U
n
= const
Następnie ustala się przy stałym napięciu U
t
maksymalne obciążenie silnika I
t
= 1,25·I
n
. Jest to
pierwszy punkt charakterystyki. Zmniejszając obciążenie i utrzymując stałe napięcie należy wykonad
około sześciu pomiarów. Pomiary należy zakooczyd, gdy prędkośd obrotowa osiągnie największą
dopuszczalną wartośd 1,5·n
n
. Zmierzone wartości prądu twornika I
t
, prędkości obrotowej n i
momentu M zestawia się w tabeli 15.1.
Rys. 15.2. Układ połączeo do pomiarów charakterystyk zewnętrznych, regulacyjnych i roboczych
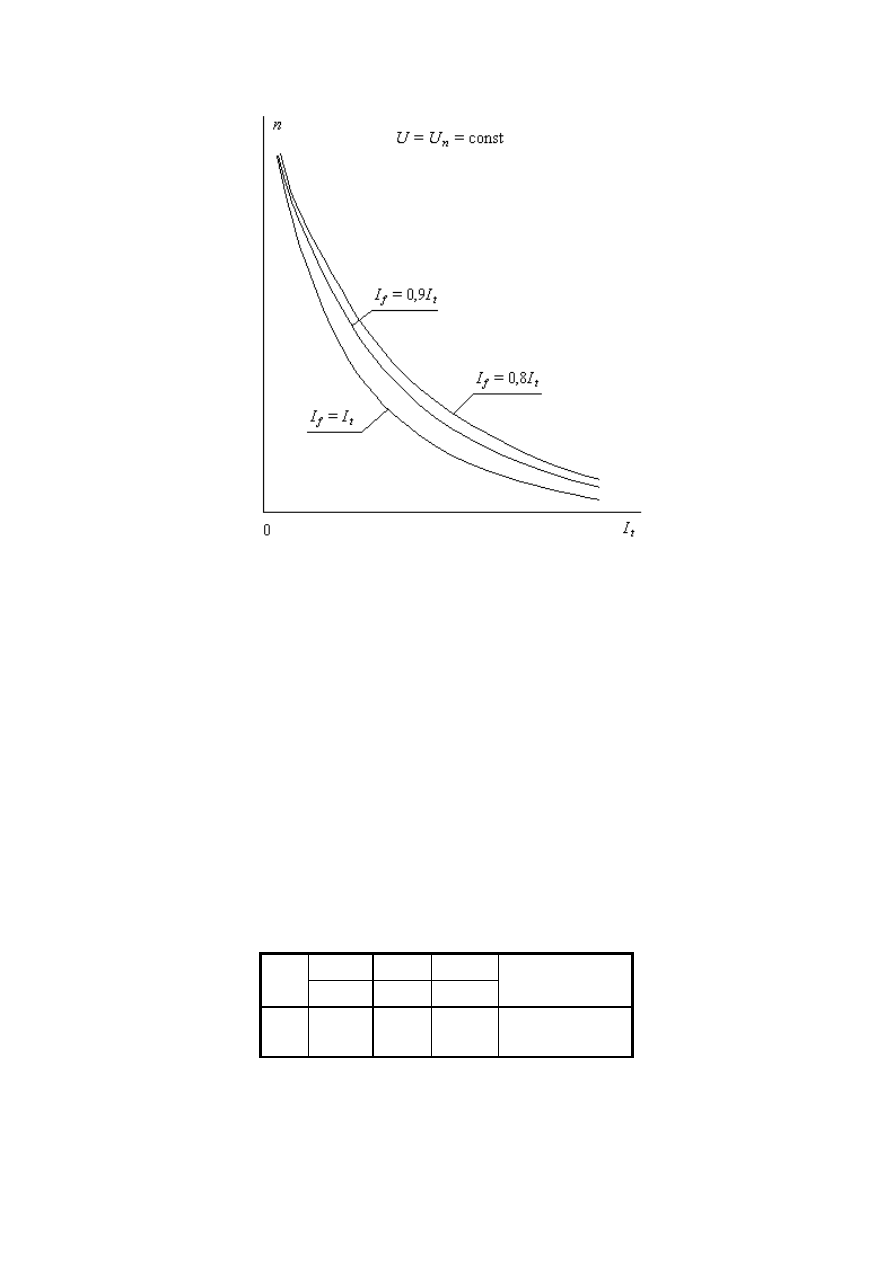
72
Rys. 15.3. Charakterystyki zewnętrzne
Pomiary należy powtórzyd dla obniżonych, przez bocznikowanie uzwojenia wzbudzenia, wartości
prądu wzbudzenia I
f
/ I
t
= 0,9; 0,8. W czasie pomiaru charakterystyki stosunek I
f
/ I
t
pozostaje stały. Po
każdorazowej zmianie obciążenia należy sprawdzid wartośd I
f
/ I
t
i skorygowad opornikiem w
obwodzie bocznikującym. Wyniki pomiarów notuje się w tabeli 15.1. Na ich podstawie należy
sporządzid charakterystyki n = f(I
t
) dla I
f
/ I
t
= 1,0; 0,9; 0,8, których przykładowy przebieg pokazano na
rys. 15.3.
3.3
Pomiar charakterystyki regulacyjnej
Charakterystyka regulacyjna informuje o tym jak regulowad napięcie zasilania silnika szeregowego,
aby przy zmieniającym się obciążeniu utrzymad stałą prędkośd obrotową. Jest więc to zależnośd
U
t
= f(I
t
) przy n = const.
Tabela 15.2
Lp.
U
t
I
t
M
Uwagi
V
A
N·m
n = n
n
= const
Pomiary wykonuje się w układzie przedstawionym na rys. 15.2. Rozpoczyna się je od obciążenia
silnika prądem I = 1,25·I
n
przy n = n
n
. Następnie zmniejsza się obciążenie i napięcie zasilania, tak by
prędkośd obrotowa nie zmieniła się. Zmierzone wartości prądu, momentu i napięcia notuje się w
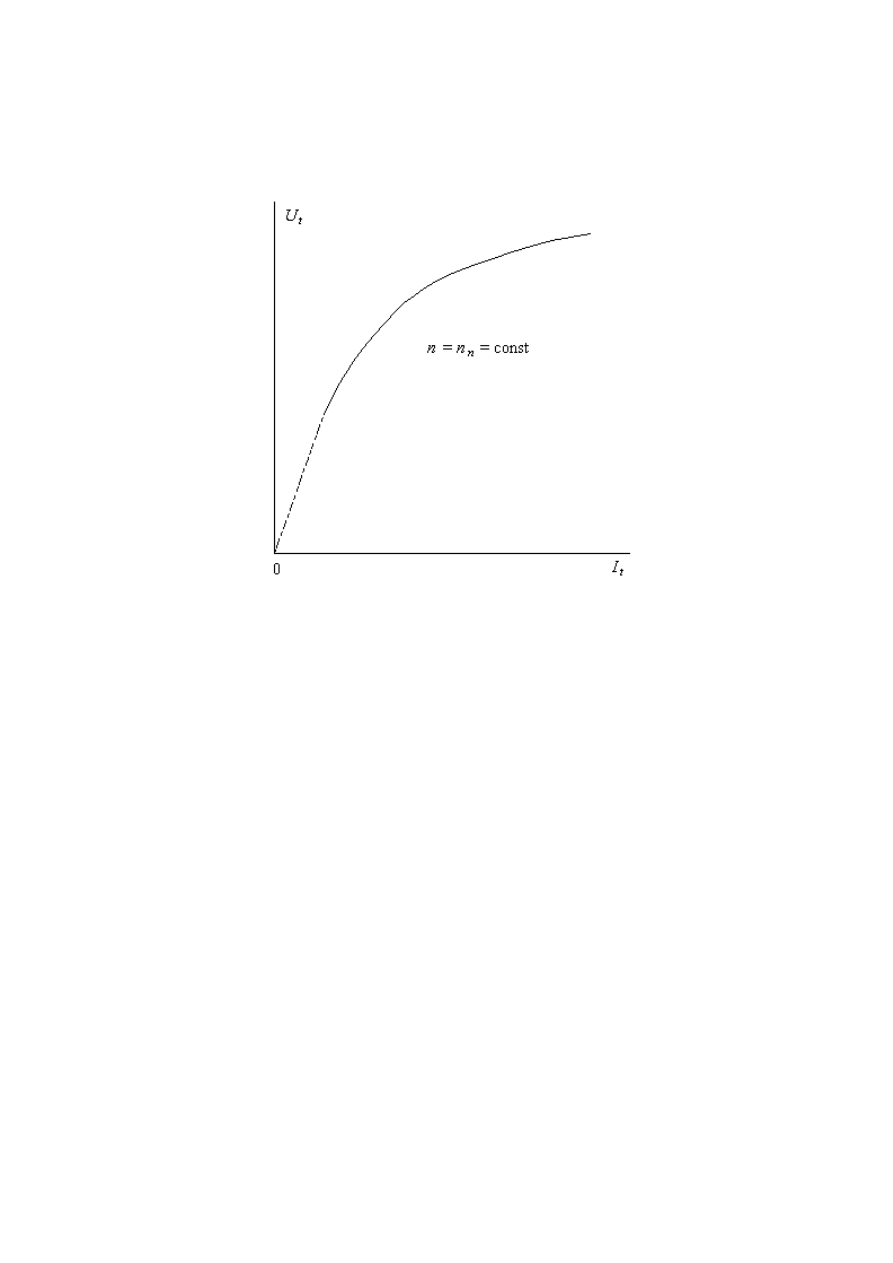
73
tabeli 15.2. Charakterystyka U
t
= f ( I
t
) (rys. 15.4), którą należy sporządzid na podstawie wyników
pomiarów, ma przebieg zbliżony do charakterystyki biegu jałowego E
0
= f(I
f
). Wynika to stąd, że dla
silnika szeregowego I
t
= I
f
.
Rys. 15.4. Charakterystyka regulacyjna
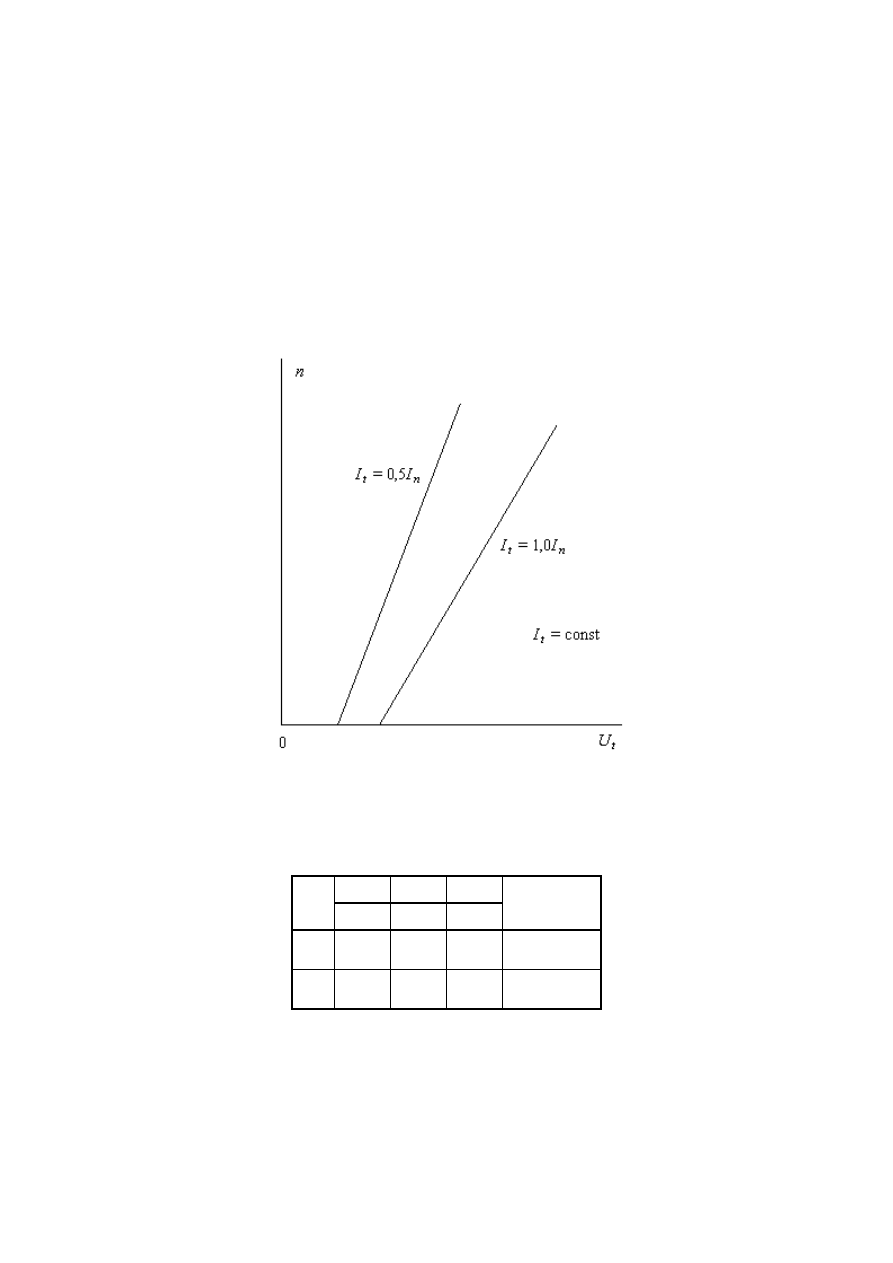
74
3.4
Pomiar charakterystyki n = f(U
t
)
Charakterystyka n = f(U
t
) przy I
t
= const informuje o zakresie regulacji prędkości przez zmianę
napięcia, przy stałym obciążeniu. Charakterystyka ta jest w przybliżeniu linią prostą (rys. 15.5).
Pomiary wykonuje się w układzie przedstawionym na rysunku 15.2 dla dwóch wartości prądu
obciążenia I
t
= (0,5; 1,0)·I
n
. Zmieniając napięcie od wartości najniższej, przy której wirnik jeszcze się
obraca, do napięcia znamionowego należy wykonad około pięciu pomiarów. Każdorazowa zmiana
napięcia wymaga regulacji obciążenia dla uzyskania zadanej stałej wartości prądu twornika I
t
. Wyniki
pomiarów należy zestawid, w tabeli 15.3, a na ich podstawie wykreślid charakterystyki n = f(U
t
).
Rys. 15.5. Charakterystyka n = f(U
t
)
Tabela 15.3
Lp.
I
t
U
t
n
Uwagi
A
V
obr/s
I
t
= 0,5·I
n
I
t
= 1,0·I
n
3.5
Wyznaczenie charakterystyk roboczych
Charakterystyki robocze są to zależności mocy oddawanej P
2
, prądu twornika I
t
, prędkości obrotowej
n i sprawności
od momentu na wale silnika M (P
2
, I
t
, n,
= f(M) przy U
t
= U
n
= const).
Charakterystyki te wyznacza się na podstawie pomiarów wykonanych podczas badania
75
charakterystyki zewnętrznej dla I
f
/ I
t
= 1,0. Wartości I
t
, n oraz M z tabeli 15.1 należy przepisad do
tabeli 15.4.
Moc pobierana P
1
jest iloczynem napięcia i prądu twornika
(15.5)
Moc oddaną przez silnik oblicza się na podstawie zmierzonych wartości momentu i prędkości
obrotowej ze wzoru
(15.6)
Sprawnośd silnika jest stosunkiem mocy oddawanej i pobieranej
(15.7)
Tabela 15.4
Lp.
U
t
I
t
P
1
n
M
P
2
Uwagi
V
A
W obr/s N·m
W
–
U
t
= U
n
= const
Na podstawie wyników pomiarów i obliczeo należy wykreślid zależności I
t
, P
2
, n,
= f(M) (rys. 15.6),
zaznaczyd punkt obciążenia znamionowego i porównad uzyskane w ten sposób dane z danymi na
tabliczce znamionowej.
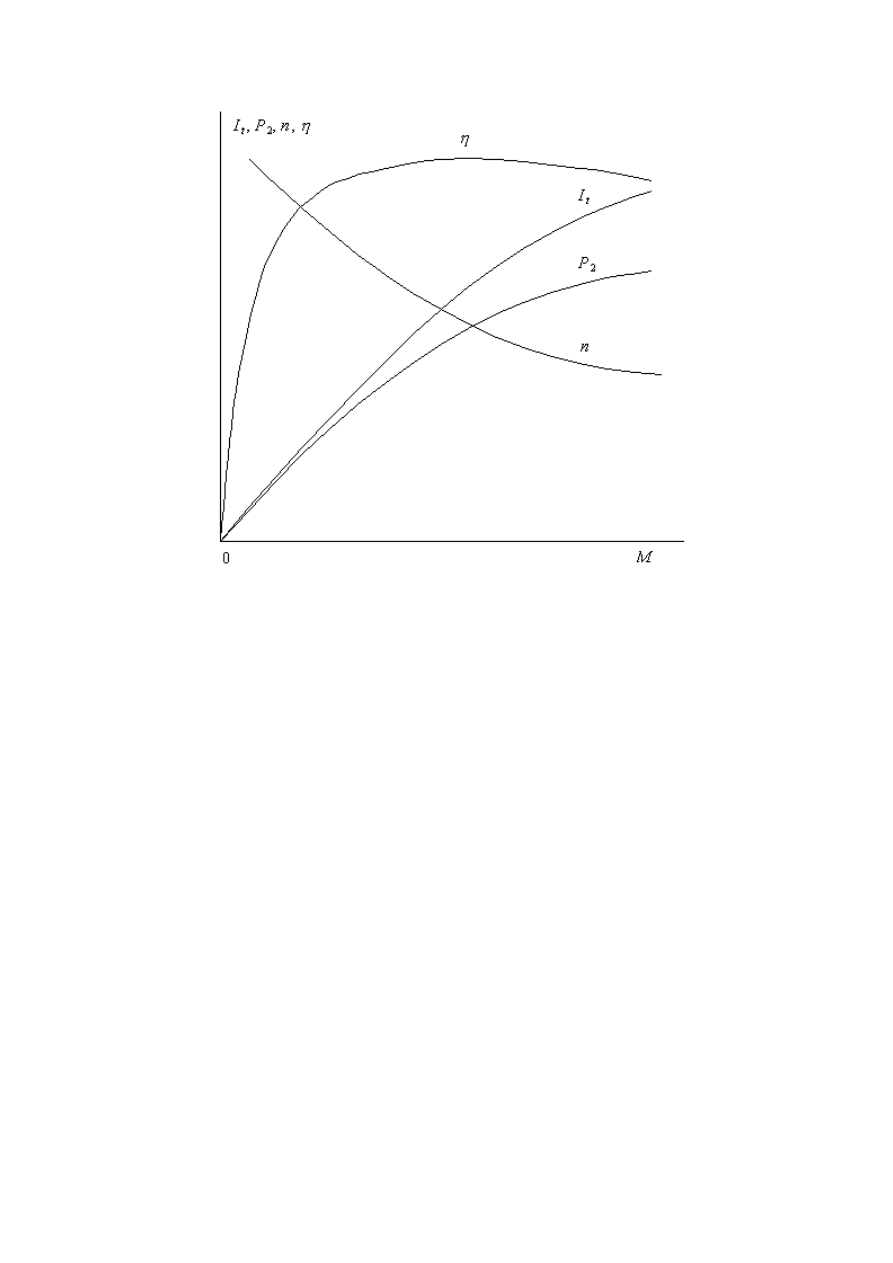
76
Rys. 15.6. Charakterystyki robocze
4
Opracowanie wyników
Sprawozdanie z dwiczenia powinno zawierad:
protokół z pomiarów,
wykresy charakterystyk zewnętrznych n = f(I
t
) przy I
f
/ I
t
= 0,8; 0,9; 1,0 i U
t
= U
n
= const,
wykres charakterystyki regulacyjnej U
t
= f(I
t
) przy n = const,
wykresy charakterystyk n = f(U
t
) przy I
t
= const dla I
t
= (0,5; 1,0)·I
n
,
wykresy charakterystyk roboczych P
2
, I
t
, n, = f(M) przy U = U
n
= const,
porównanie danych znamionowych z wartościami zmierzonymi,
uwagi i wnioski.
5
Pytania kontrolne
Gdzie stosuje się silniki szeregowe i dlaczego?
Omówid różnice konstrukcyjne silników szeregowych i bocznikowych prądu stałego.
Porównad zachowanie się silników bocznikowego i szeregowego podczas zmniejszania
obciążenia.
Wyjaśnid zjawisko „rozbiegania się” silnika szeregowego.
Omówid możliwości regulacji prędkości obrotowej.

77
ĆWICZENIE 21
PRĄDNICA SYNCHRONICZNA TRÓJFAZOWA – CHARAKTERYSTYKI
1
Program ćwiczenia
Wyznaczenie charakterystyki biegu jałowego.
Sprawdzenie kształtu krzywej napięcia.
Wyznaczenie charakterystyk zwarcia.
Wyznaczenie charakterystyki zewnętrznej przy cos
= 1.
Wyznaczenie charakterystyki regulacji przy cos
= 1.
2
Cel ćwiczenia
Pierwsza cześd dwiczenia jest poświecona wyznaczeniu podstawowych charakterystyk prądnicy
synchronicznej będących podstawą do określenia jej głównych parametrów niezbędnych w ocenie
konstrukcji maszyny oraz analizie jej zachowania w czasie pracy ustalonej.
W drugiej części dwiczenia będzie badana praca prądnicy pracującej na sied wydzieloną. Pozwoli to na
uchwycenie podstawowych zależności miedzy napięciem na zaciskach maszyny, prądem twornika i
prądem wzbudzenia przy stałym współczynniku mocy cos
= 1.
3
Omówienie programu ćwiczenia
Przed przystąpieniem do wykonywania połączeo i pomiarów należy dokonad oględzin badanej
prądnicy i silnika napędowego oraz odnotowad ich dane znamionowe.
3.1
Pomiar charakterystyki biegu jałowego
Charakterystyka biegu jałowego przedstawia zależnośd SEM E
f
indukowanej w tworniku od prądu
wzbudzenia I
f
przy otwartym obwodzie twornika i stałej prędkości obrotowej (E
f
= f(I
f
) przy I = 0,
n = const).
Znajomośd przebiegu charakterystyki biegu jałowego pozwala ocenid budowę obwodu
magnetycznego maszyny (udział szczeliny powietrznej, stopieo nasycenia itp.) oraz wespół z innymi
charakterystykami wyznaczyd metodami zastępczymi charakterystyki eksploatacyjne, bez
konieczności obciążenia maszyny. Najczęściej charakterystykę biegu jałowego wyznacza się dla
znamionowej prędkości obrotowej. Jeśli jest to niemożliwe np. ze względu na zbyt dużą wartośd SEM
E
f
pomiary wykonuje się dla mniejszych prędkości, a uzyskane wartości przelicza się na warunki
znamionowe wg wzoru
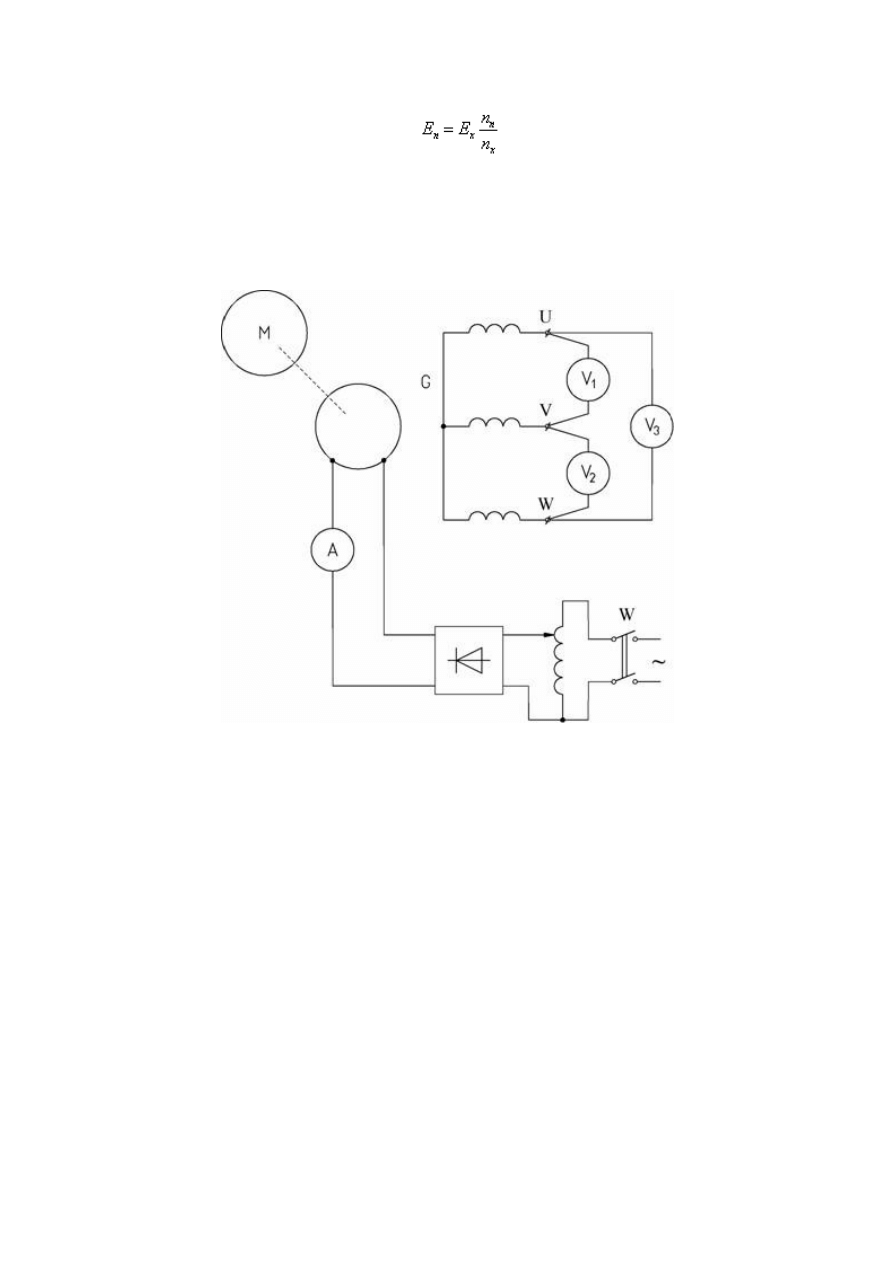
78
(21.1)
w którym: E
x
– wartośd SEM zmierzona przy prędkości n
x
E
n
– wartośd SEM przeliczona dla prędkości n
n
Rys. 21.1. Schemat pomiarowy do wyznaczania charakterystyki biegu jałowego
Schemat pomiarowy do wyznaczania charakterystyki biegu jałowego przedstawiono na rys. 21.1.
Silnikiem napędowym prądnicy jest silnik bocznikowy prądu stałego. Po jego uruchomieniu i
zwiększeniu prędkości obrotowej do prędkości znamionowej prądnicy przy otwartym wyłączniku
zasilania wzbudzenia W odczytuje się wartości SEM twornika E
f
dla I
f
= 0. Jest to tzw. SEM remanentu.
Następnie po zamknięciu wyłącznika stopniowo zwiększamy prąd wzbudzenia do wartości, przy
której SEM osiąga wartośd 1,3 U
n
, notując wartości E
f
i I
f
oraz kontrolując stałośd prędkości
obrotowej. Wyniki pomiarów należy zestawid w tabeli 21.1. Otrzymuje się w ten sposób wzrastającą
gałąź charakterystyki biegu jałowego. Gałąź opadającą wyznacza się podczas zmniejszania prądu
wzbudzenia do zera. Aby wyeliminowad wpływ zjawiska histerezy magnetycznej na wyniki pomiarów,
należy je wykonywad przy prądzie wzbudzenia wzrastającym, a następnie malejącym monotonicznie.
Z tego względu, amperomierz do pomiaru prądu wzbudzenia powinien byd przyrządem
wielozakresowym, dostosowanym do zmiany zakresu bez przerywania obwodu.
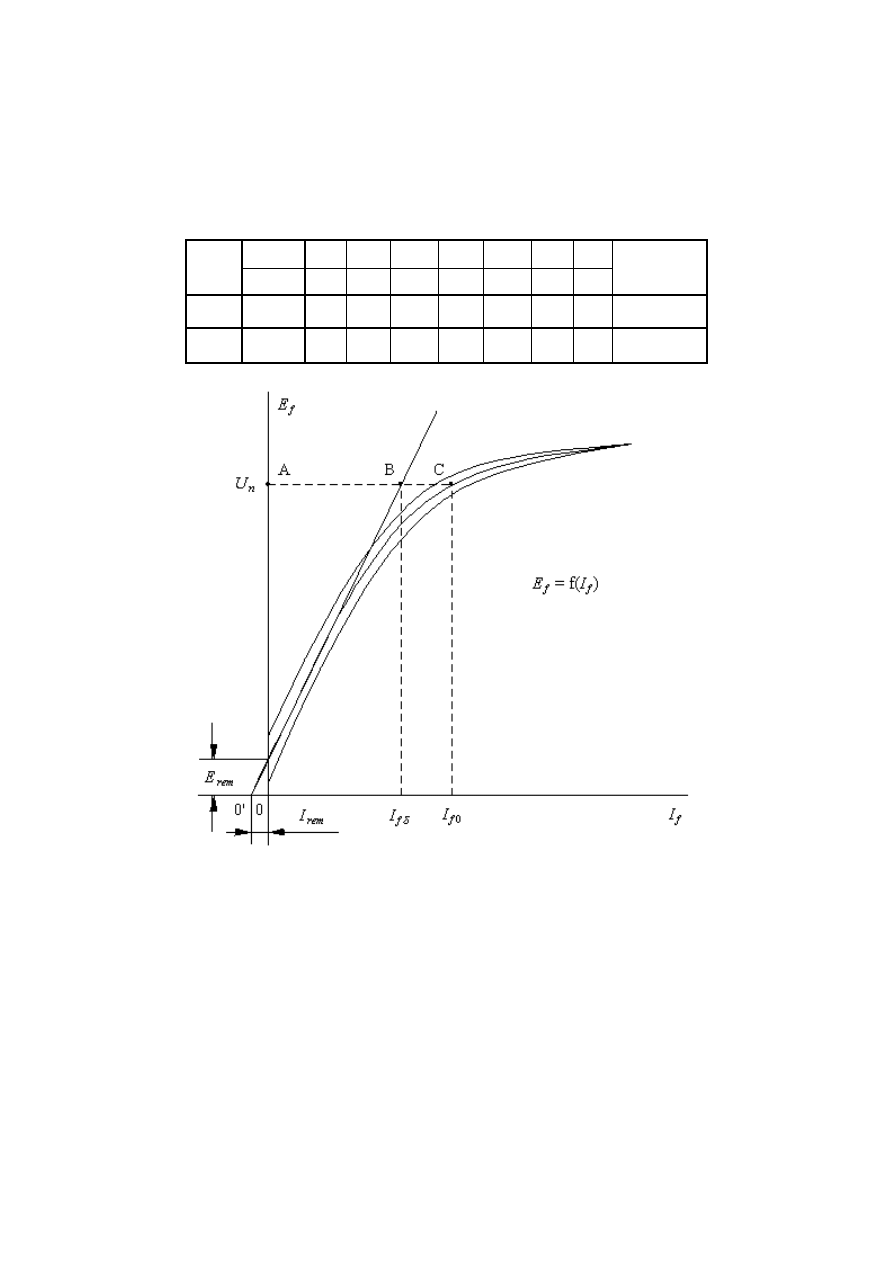
79
Tabela 21.1
Lp.
n
I
f
i
f
E
1
E
2
E
3
E
śr
e
f
Uwagi
obr/s
A
–
V
V
V
V
–
I
f
rośnie
I
f
maleje
Rys. 21.2. Charakterystyka biegu jałowego
Na podstawie wyników pomiarów należy wykreślid obydwie gałęzie charakterystyki biegu jałowego
oraz praktyczną charakterystykę, która leży pośrodku pomiarowo wyznaczonych gałęzi (rys. 21.2).
Najczęściej charakterystykę biegu jałowego wykreśla się w jednostkach względnych, co ułatwia ich
wzajemne porównywanie. Jako wartości odniesienia przyjmuje się w przypadku SEM wartośd U
n
, a
dla prądu wzbudzenia wartośd I
f0
, która odpowiada napięciu U
n
, na biegu jałowym, przy znamionowej
prędkości obrotowej. Względne wartości oblicza się ze wzorów
80
(21.2)
(21.3)
Strumieo remanentu utrzymujący się w obwodzie magnetycznym maszyny powoduje, że otrzymana
pomiarowo charakterystyka nie przechodzi przez początek układu. Na jej podstawie należy
wyznaczyd teoretyczną charakterystykę biegu jałowego. W tym celu przedłuża się prostoliniową częśd
charakterystyki, aż do przecięcia się jej z osią odciętych, i powstały punkt 0’ traktuje się jako początek
układu współrzędnych charakterystyki biegu jałowego. Na jej podstawie można wyznaczyd stosunek
k
ns
będący miarą nasycenia obwodu magnetycznego maszyny
(21.4)
3.2
Sprawdzenie kształtu krzywej napięcia
Zgodnie z wymaganiami normy, maksymalna różnica między przebiegiem SEM a jej pierwszą
harmoniczną nie powinna przekraczad 5% amplitudy pierwszej harmonicznej. Wymaganie to
dotyczy maszyn powyżej 1MW. W dwiczeniu zostanie zastosowana uproszczona metoda
sprawdzenia kształtu krzywej napięcia. Na ekranie oscyloskopu katodowego jest umieszczony obraz
dwóch sinusoid, o tej samej amplitudzie i okresie, przesuniętych w pionie o wartośd 0,1A (rys. 21.3).
Za pomocą pionowego i poziomego wzmacniacza oscyloskopu należy krzywą badanego napięcia
wprowadzid między dwie sinusoidy. Jeśli badany przebieg nie wychodzi poza obszar ograniczony
sinusoidami, to uważa się go za praktycznie sinusoidalny. Obserwację wykonad dla napięd fazowych
i międzyfazowych. (Uwaga! Napięcia z zacisków maszyny muszą byd podawane na oscyloskop przez
dzielnik napięcia).
81
Rys. 21.3. Szkic do sprawdzenia kształtu krzywej napięcia
3.3
Wyznaczenie charakterystyki symetrycznego zwarcia trójfazowego
ustalonego
Charakterystyką symetrycznego zwarcia trójfazowego ustalonego jest nazywana zależnośd prądu
twornika I
a
od prądu wzbudzenia I
f
przy zwartych zaciskach twornika i znamionowej prędkości
obrotowej (I
az
= f(I
f
) przy n = n
n
). Schemat układu pomiarowego przedstawiono na rys. 21.4.
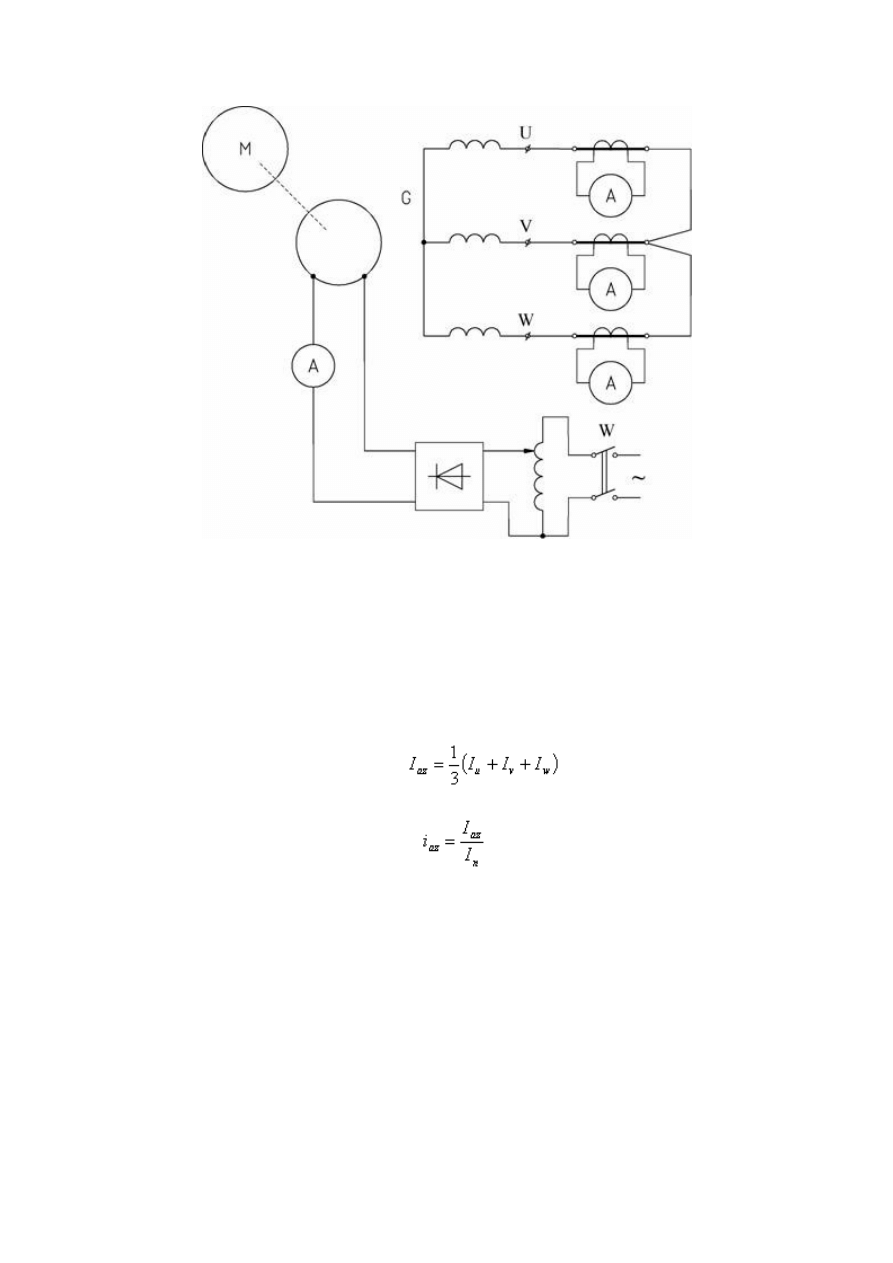
82
Rys. 21.4. Układ pomiarowy do wyznaczenia charakterystyk zwarcia trójfazowego ustalonego
Po uruchomieniu silnika napędowego i nastawieniu znamionowej prędkości obrotowej
przeprowadzamy pomiar charakterystyki, zmieniając prąd wzbudzenia od wartości odpowiadającej
1,3·I
n
do I
f
= 0. Wyniki zestawid w tabeli 21.2, w której
(21.5)
(21.6)
i
f
– obliczone wg (21.3)
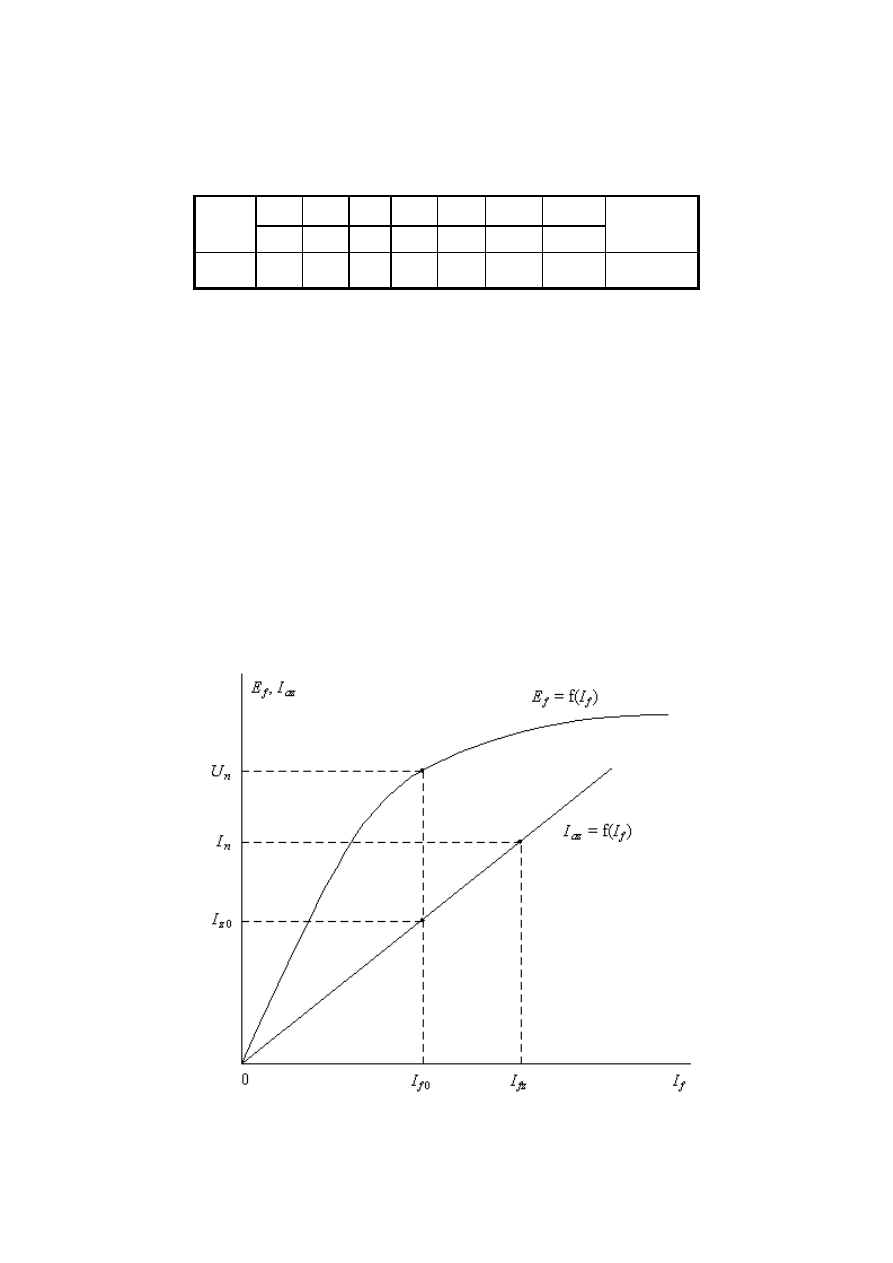
83
Tabela 21.2
Lp.
I
f
i
f
I
u
I
v
I
w
I
az
i
az
Uwagi
A
–
A
A
A
A
–
n = n
n
Na podstawie wyników pomiarów należy wykreślid w jednostkach względnych na wspólnym wykresie
z charakterystyką biegu jałowego, charakterystykę zwarcia (rys.21.5). Charakterystyka ta jest linią
prostą, gdyż SEM odpowiadająca strumieniowi w szczelinie maszyny podczas stanu zwarcia nie
przekracza 10 - 15% wartości napięcia znamionowego przy I
az
= I
n
. Obwód magnetyczny pozostaje
zatem nienasycony, a reaktancja synchroniczna ma wartośd stałą.
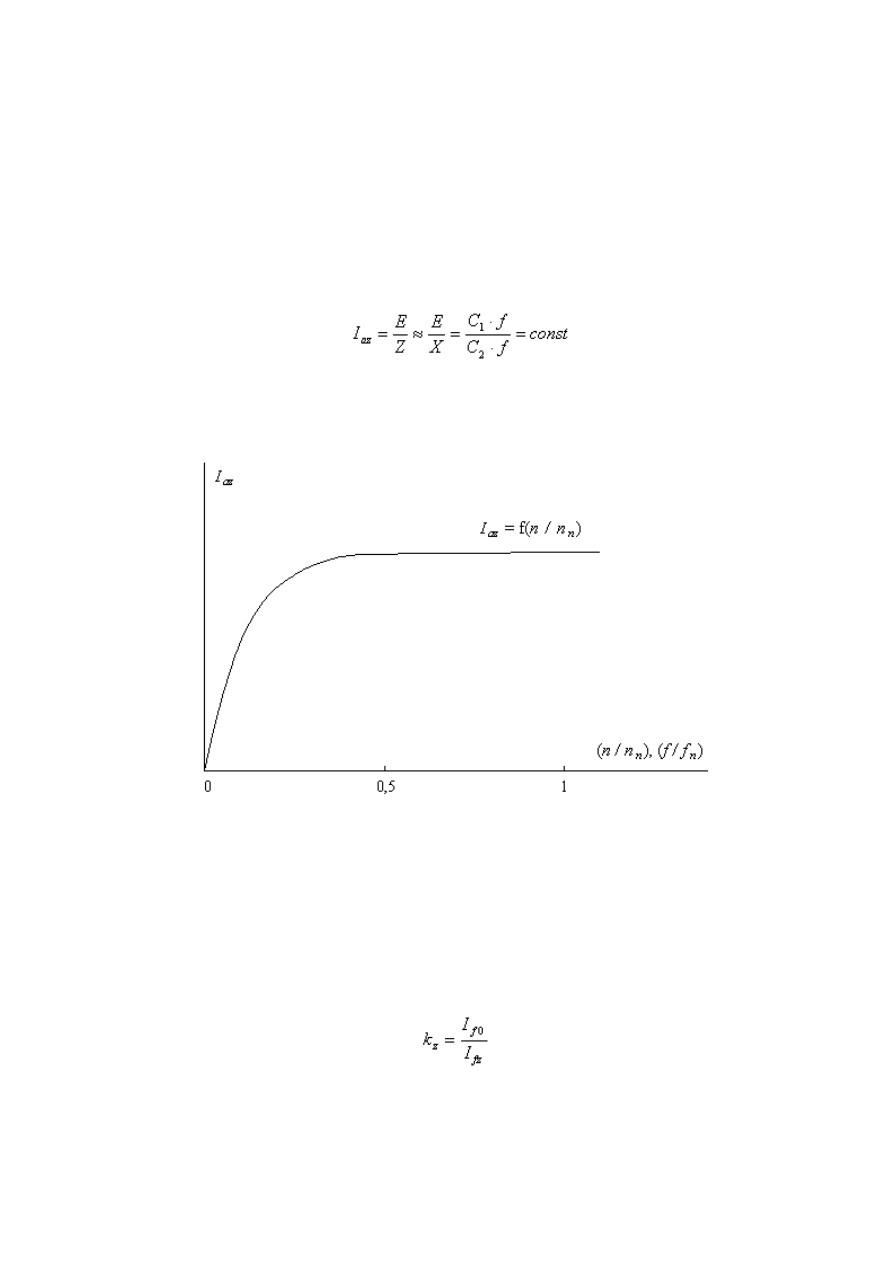
84
Rys. 21.5. Charakterystyki zwarcia i biegu jałowego wraz z konstrukcją do wyznaczenia stosunku
zwarcia
Warto zauważyd, że prąd zwarcia praktycznie nie zależy od prędkości obrotowej (częstotliwości).
Wynika to stąd, że prąd. zwarcia, jako iloraz SEM i impedancji obwodu zwarcia, jest praktycznie stały
w zakresie częstotliwości, w którym rezystancja jest pomijalna w stosunku do reaktancji
(21.7)
Dopiero przy małej częstotliwości wartości reaktancji maszyny i rezystancji uzwojeo są
porównywalne, co powoduje, że impedancja nie zależy liniowo od częstotliwości (rys. 21.6).
Rys. 21.6. Zależnośd ustalonego prądu zwarcia od prędkości obrotowej prądnicy synchronicznej
Na podstawie rys. 21.5 należy wyznaczyd tzw. stosunek zwarcia definiowany jako iloraz prądu
wzbudzenia I
f0
potrzebnego do uzyskania podczas biegu jałowego SEM E
f
= U
n
do prądu wzbudzenia
I
fz
, przy którym w stanie symetrycznego zwarcia w uzwojeniu twornika płynie prąd I
n
. Zatem
(21.8)
Stosunek zwarcia można także wyrazid jako
85
(21.9)
przy czym I
z0
oznacza prąd zwarcia dla I
f
= I
f0
(rys. 21.5). Stosunek ten oznacza zatem krotnośd
ustalonego prądu, jaki płynie w tworniku po zwarciu maszyny wzbudzonej na biegu jałowym do
napięcia znamionowego, w stosunku do prądu znamionowego. Stosunek zwarcia zawiera się w
granicach od 0,4 do 1,1 przy czym wartości mniejsze odnoszą się do maszyn większych.
Po podstawieniu do (21.8) w miejsce I
z0
(21.10)
gdzie X
d
– reaktancja synchroniczna w osi podłużnej,
otrzymuje się zależnośd
(21.11)
z której wynika, że stosunek zwarcia jest ilościowo równy odwrotności reaktancji synchronicznej
podłużnej wyrażonej w jednostkach względnych. Większy stosunek zwarcia oznacza zatem mniejszą
reaktancję synchroniczną maszyny i większy prąd zwarcia odpowiadający danemu wzbudzeniu.
Stosunek zwarcia określa również przeciążalnośd statyczną maszyny zgodnie z zależnością
(21.12)
Znamionowy prąd wzbudzenia I
fn
oraz cos
n
są zwykle podawane na tabliczce znamionowej
maszyny.
3.4
Wyznaczanie charakterystyki zewnętrznej prądnicy
Charakterystyka zewnętrzna to zależnośd napięcia na zaciskach twornika maszyny U od prądu
twornika I
a
przy stałym prądzie wzbudzenia I
f
, stałej częstotliwości f oraz stałym współczynniku mocy
cos (U = f(I
a
) przy I
f
= const, cos
= const, f = const). W dwiczeniu charakterystykę wyznacza się dla
cos
= 1. Schemat układu pomiarowego przedstawiono na rys. 21.7. Obciążeniem prądnicy jest
regulowany rezystor trójfazowy R
o
. Po uruchomieniu prądnicy na biegu jałowym i wzbudzeniu jej do
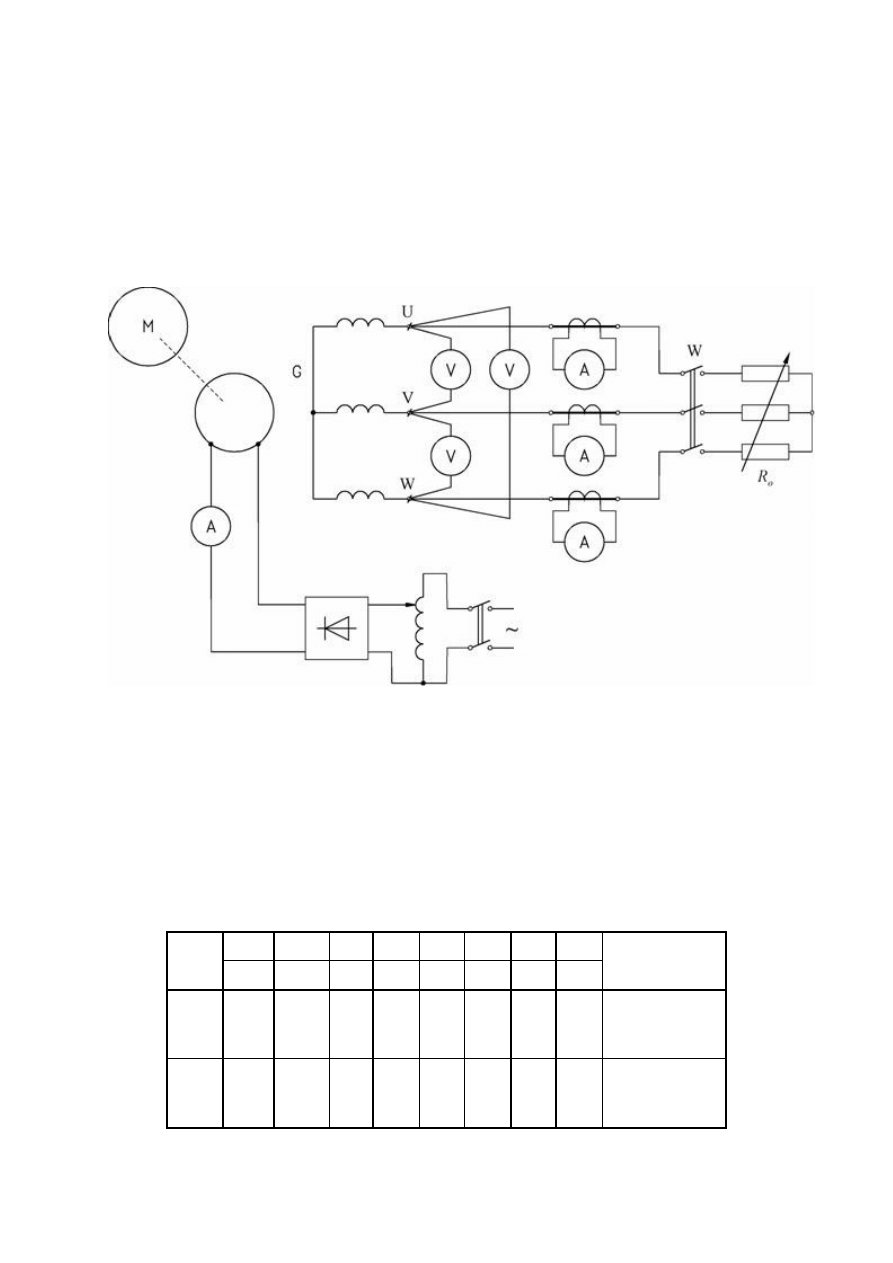
86
napięcia znamionowego należy ustawid rezystor R
o
w położeniu R
max
i zamknąd wyłącznik W.
Następnie zmniejszając rezystancję R
o
zwiększad prąd twornika aż do wartości I
n
. Przez cały czas
należy utrzymywad stałe wartości prądu wzbudzenia oraz prędkości obrotowej. Wyniki pomiarów
zestawid w tabeli 21.3. Na ich podstawie wykreśla się dolną gałąź charakterystyki zewnętrznej (rys.
21.8, krzywa a).
Rys. 21.7. Układ pomiarowy do wyznaczenia charakterystyki zewnętrznej prądnicy
Tabela 21.3
Lp.
I
U
I
V
I
W
I
śr
U
1
U
2
U
3
U
śr
Uwagi
A
A
A
A
V
V
V
V
prąd I
a
rośnie
I
f
=
prąd I
a
maleje
I
f
=
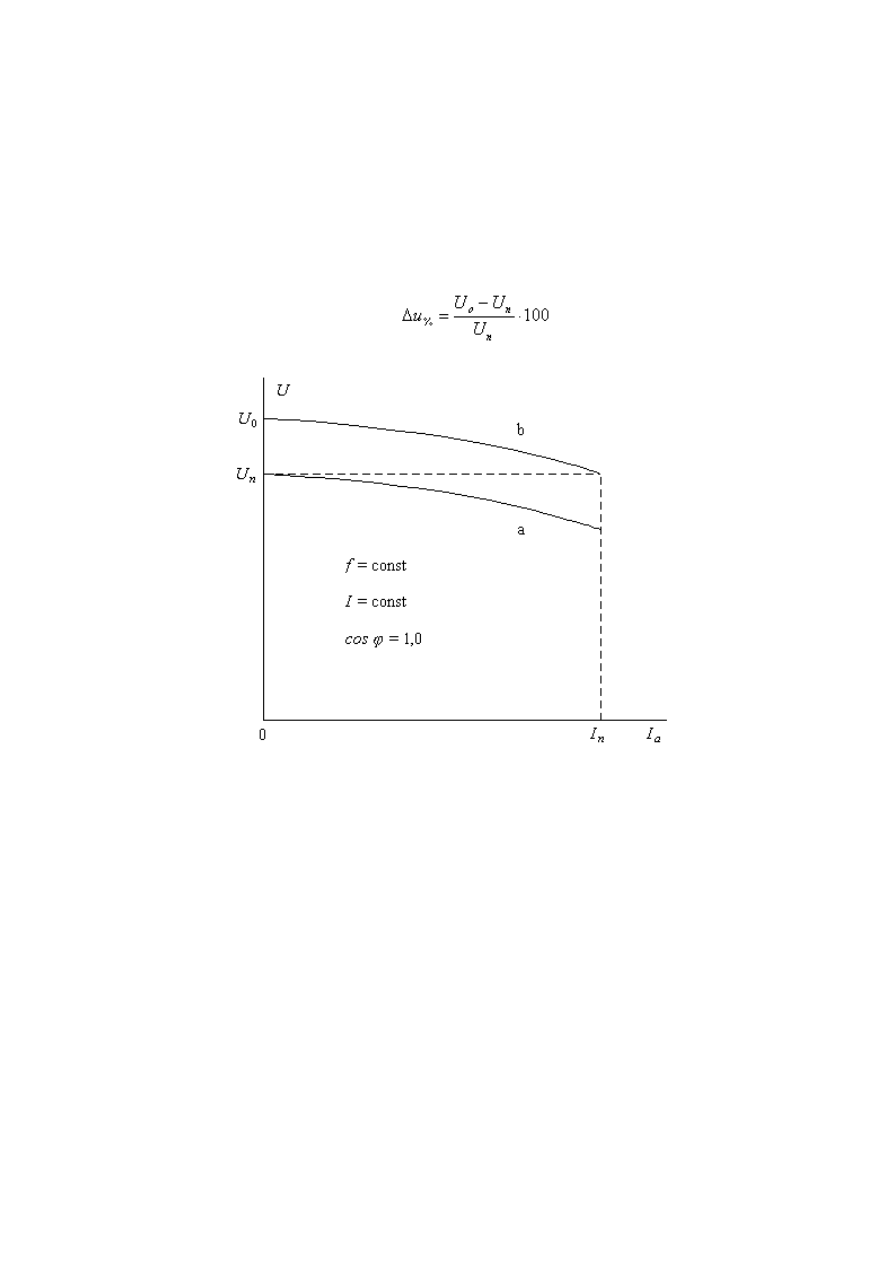
87
Aby wyznaczyd zmiennośd napięcia prądnicy, wykonuje się pomiar charakterystyki zewnętrznej przy
odciążaniu (rys. 21.8, krzywa b). W tym celu przy prądzie obciążenia I = I
n
należy ustalid taką wartośd
prądu wzbudzenia, aby napięcie na zaciskach było równe znamionowemu, U = U
n
. Następnie
wykonuje się pomiary, zmniejszając prąd obciążenia aż do I
a
= 0, przy zachowaniu n = n
n
oraz
I
f
= const. Otrzymuje się w ten sposób gałąź b charakterystyki zewnętrznej. Na jej podstawie należy
wyznaczyd zmiennośd napięcia
u
%
, będącą procentowym wzrostem napięcia na zaciskach maszyny,
przy jej odciążeniu od warunków obciążenia znamionowego do zera
(21.12)
Rys. 21.8. Charakterystyki zewnętrzne prądnicy synchronicznej
3.5
Wyznaczenie charakterystyki regulacji
Charakterystyka regulacji przedstawia zależnośd prądu wzbudzenia I
f
od prądu twornika, przy
U = const, cos
= const, n = const. Wskazuje ona jak należy regulowad prąd wzbudzenia, aby przy
zmieniającym się obciążeniu prądnicy utrzymad stałe napięcie na jej zaciskach.
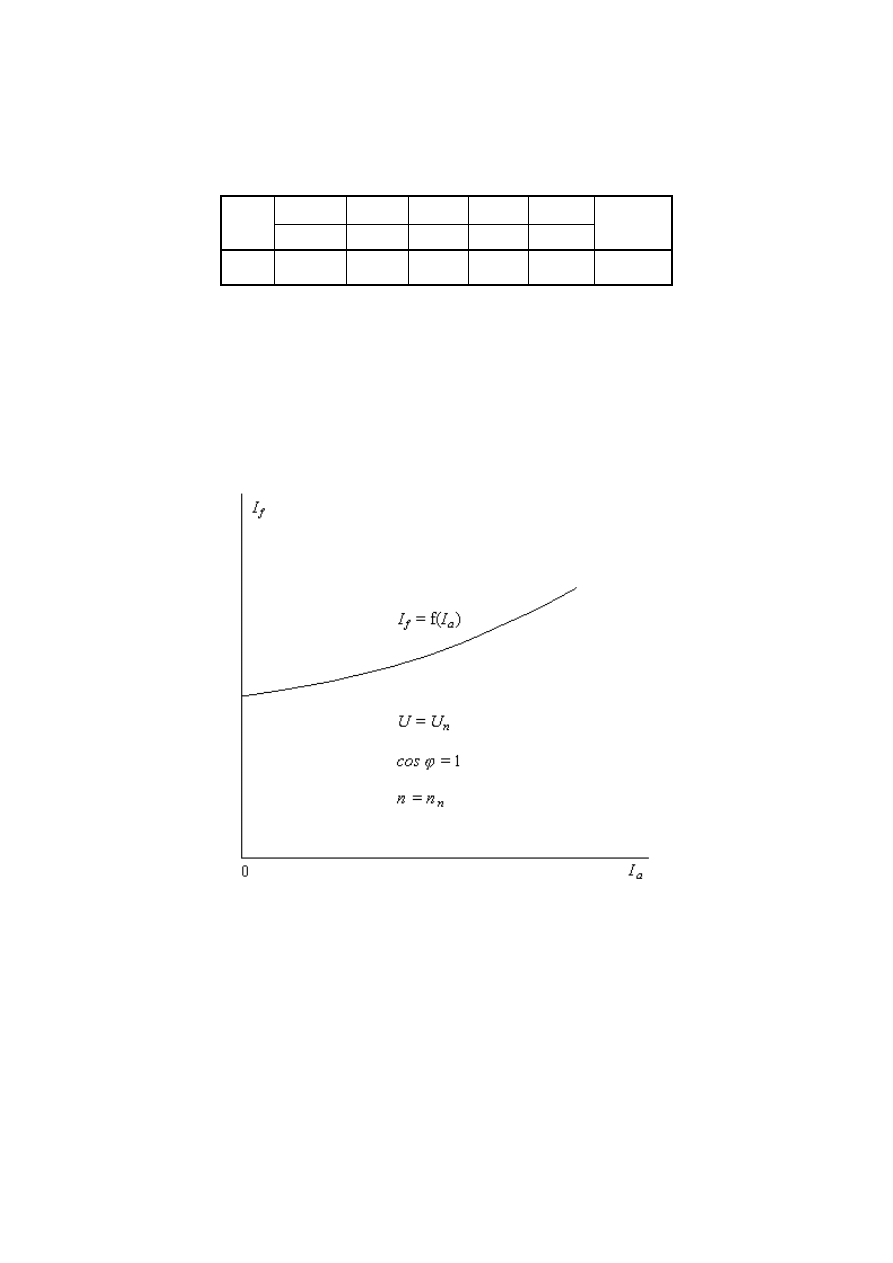
88
Tabela 21.4
Lp.
I
f
I
U
I
V
I
W
I
aśr
Uwagi
A
A
A
A
A
U = U
n
Układ pomiarowy jak w p. 3.4. Maszynę pracującą na biegu jałowym wzbudza się do napięcia
znamionowego. Następnie po załączeniu rezystora R
o
należy zwiększad prąd obciążenia od 0 do 1,2·I
n
.
Jednocześnie prąd wzbudzenia reguluje się tak, aby napięcie twornika pozostawało nie zmienione. W
czasie pomiarów należy utrzymywad stałą prędkośd obrotową n = n
n
. Wyniki pomiarów zestawid w
tabeli 21.4 oraz na ich podstawie wykreślid charakterystykę regulacji (rys. 21.9).
Rys. 21.9. Charakterystyki regulacji prądnicy synchronicznej
4
Sprawozdanie z ćwiczenia
Sprawozdanie z dwiczenia powinno zawierad:
protokół z pomiarów,
wykresy charakterystyk:
–
biegu jałowego E
f
= f(I
f
),
–
zwarcia symetrycznego I = f(I
f
),
–
zewnętrznej U = f(I), przy cos
= 1,
–
regulacyjnej I
f
= f(I) przy cos
= 1,

89
obliczenia:
–
współczynnika nasycenia obwodu magnetycznego k
n
,
–
współczynnika zwarcia k
z
,
–
reaktancji synchronicznej x
d
,
–
przeciążalności p,
–
zmienności napięcia przy cos
= 1,
uwagi i wnioski z pomiarów.
5
Pytania kontrolne
Jaka jest różnica między rzeczywistą a teoretyczną charakterystyką biegu jałowego?
Podad definicje charakterystyk wyznaczanych w dwiczeniu.
Uzasadnid prostoliniowośd charakterystyki zwarcia.
Jaka jest praktyczna interpretacja stosunku zwarcia?
Uzasadnid, dlaczego zmiennośd napięcia jest większa w przypadku maszyn z małym stosunkiem
zwarcia.
Kiedy można uznad, że krzywa napięcia prądnicy jest praktycznie sinusoidalna?
Podad definicję przeciążalności statycznej maszyny synchronicznej.
O czym informuje charakterystyka regulacji?

90
ĆWICZENIE 22
BADANIE PRĄDNICY SYNCHRONICZNEJ PRACUJĄCEJ NA SIEĆ SZTYWNĄ
1
Program ćwiczenia
Synchronizacja maszyny synchronicznej z siecią sztywną.
Pomiar krzywych V.
Pomiar charakterystyki obciążenia przy cos = 0 ind.
Wyznaczenie reaktancji Potiera.
Wyznaczenie znamionowego prądu wzbudzenia i zmienności napięcia metodą wykresu
amerykaoskiego.
2
Cel ćwiczenia
Najczęściej spotykanym w praktyce przypadkiem pracy prądnicy synchronicznej jest jej praca
równoległa z siecią energetyczną o bardzo dużej mocy, praktycznie stałym napięciu i stałej
częstotliwości. Sied taką nazywa się siecią sztywną. Celem dwiczenia jest poznanie metody włączania
maszyny synchronicznej do sieci sztywnej oraz badanie jej zachowania się podczas zmian prądu
wzbudzenia i momentu napędowego. Dwiczenie ma również na celu poznanie metod zastępczych
wyznaczania niektórych parametrów roboczych maszyny synchronicznej.
3
Omówienie programu ćwiczenia
3.1
Włączenie prądnicy do pracy równoległej
Maszynę synchroniczną można włączyd do sieci dwiema metodami:
samosynchronizacji,
synchronizacji.
Pierwszą metodę stosuje się powszechnie do maszyn małych mocy, zwłaszcza silników. Jest ona
dokładnie omówiona w dwiczeniu nr 24. Metoda synchronizacji to przyłączanie maszyny do sieci w
taki sposób, aby nie wystąpił udar prądowy. Możliwe to jest wtedy, gdy w chwili włączenia
są spełnione warunki synchronizacji, czyli:
równośd modułów napięd maszyny i sieci,
równośd częstotliwości maszyny i sieci,
zgodnośd kolejności faz napięd maszyny i sieci,
równośd wartości chwilowych napięd maszyny i sieci.
Prosty układ umożliwiający stwierdzenie, czy warunki te zostały spełnione przedstawiono na rys.
22.1. Przy otwartym wyłączniku należy regulowad prędkośd obrotową silnika napędowego tak, aby
doprowadzid prądnicę do prędkości znamionowej i wzbudzid ją do napięcia U
G
= U
s
. Następnie należy
sprawdzid zgodnośd kolejności faz przyłączonych do obydwu stron wyłącznika sprzęgającego. Jednym
ze sposobów jest użycie tzw. wskaźnika kolejności faz, który działa podobnie jak silnik asynchroniczny
tarczowy. Duży poślizg tarczy wskaźnika ułatwia zaobserwowanie kierunku jej wirowania. Wskaźnik
ten przyłącza się do zacisków wyłącznika po stronie sieci, a następnie, bez zmiany kolejności
przewodów, do zacisków po stronie prądnicy. Jeśli w obydwóch wypadkach kierunek wirowania
tarczy jest taki sam, to znaczy, że prądnica została przyłączona prawidłowo. Jeśli wynik testu oznacza
brak zgodności faz, to należy, po uprzednim wyłączeniu napięcia, zamienid miejscami dwa dowolne
przewody fazowe po stronie sieci lub prądnicy. Po tej zmianie trzeba powtórzyd sprawdzenie
zgodności kolejności faz.
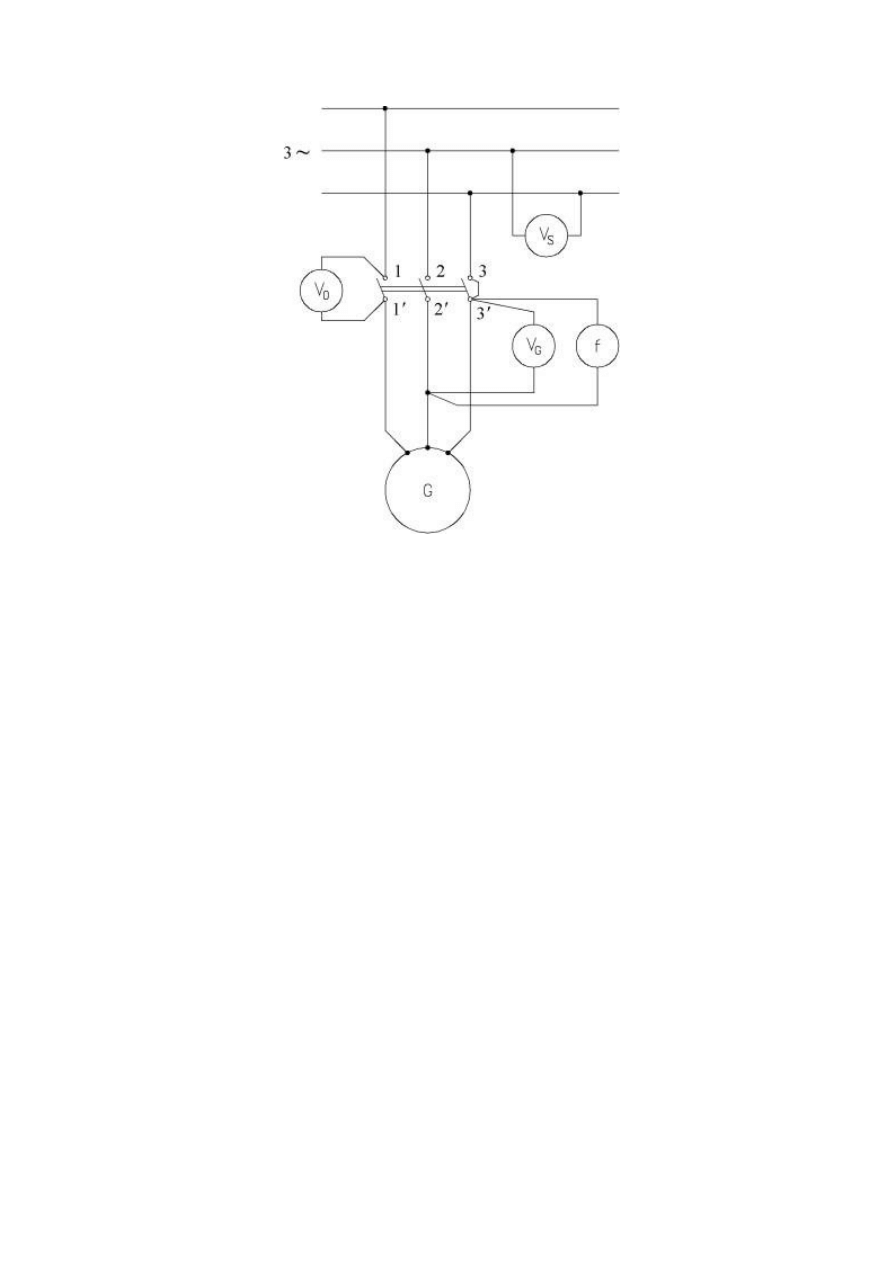
91
Rys. 22.1. Układ do sprawdzenia warunków synchronizacji
Jeśli U
s
U
G
oraz f
s
f
G
, wskazówka woltomierza V
0
będzie się wolno wahad. Zbyt szybkie wahania
oznaczają, że częstotliwości sieci i prądnicy bardzo się różnią, natomiast jeśli mimo małej różnicy
częstotliwości wskazówka woltomierza nie cofa się okresowo do zera, oznacza to, że występuje
różnica między modułami napięd U
s
i U
G
. Należy zwrócid uwagę na to, że maksymalne napięcie
pojawiające się na woltomierzu V
0
jest równe podwójnemu napięciu międzyfazowemu, co należy
brad pod uwagę przy doborze zakresu pomiarowego tego przyrządu. Jeśli nie ma odpowiedniego
woltomierza, można w miejsce połączenia między zaciskami 3 i 3’ włączyd dodatkowo woltomierz
identyczny jak V
0
. Będą się one wahad synchronicznie, a maksymalne napięcie na każdym nie
przekroczy wartości napięcia międzyfazowego.
W chwili, w której woltomierz V
0
wskazuje 0, spełnione są warunki synchronizacji. Ze względu na
pewne niewielkie opóźnienie reakcji obserwatora impuls na załączenie stycznika należy podad, gdy
wskazówka zbliża się do pozycji 0. Jeśli synchronizacja została przeprowadzona prawidłowo, to w
chwili włączenia prądnicy nie ma charakterystycznego tąpnięcia, a maszyna nie pobiera żadnego
prądu. Jeśli prądnica jest wyposażona w tachometr, to użycie częstotliwościomierza pokazanego na
rys. 22.1 nie jest konieczne.
Obecnie do kontroli warunków synchronizacji bardzo często stosuje się tzw. kolumny
synchronizacyjne w wykonaniach firmowych. Mają one wskaźnik różnicy napięd U, wskaźnik różnicy
częstotliwości f oraz synchronoskop, który jest wskaźnikiem zgodności fazowej napięd prądnicy i
sieci (rys. 22.2). Wskazówka synchronoskopu wiruje z częstotliwością równą różnicy częstotliwości
sieci i prądnicy. Zgodnośd faz tych napięd występuje, gdy wskazówka synchronoskopu pokryje się z
pionową kreską na jego tarczy.
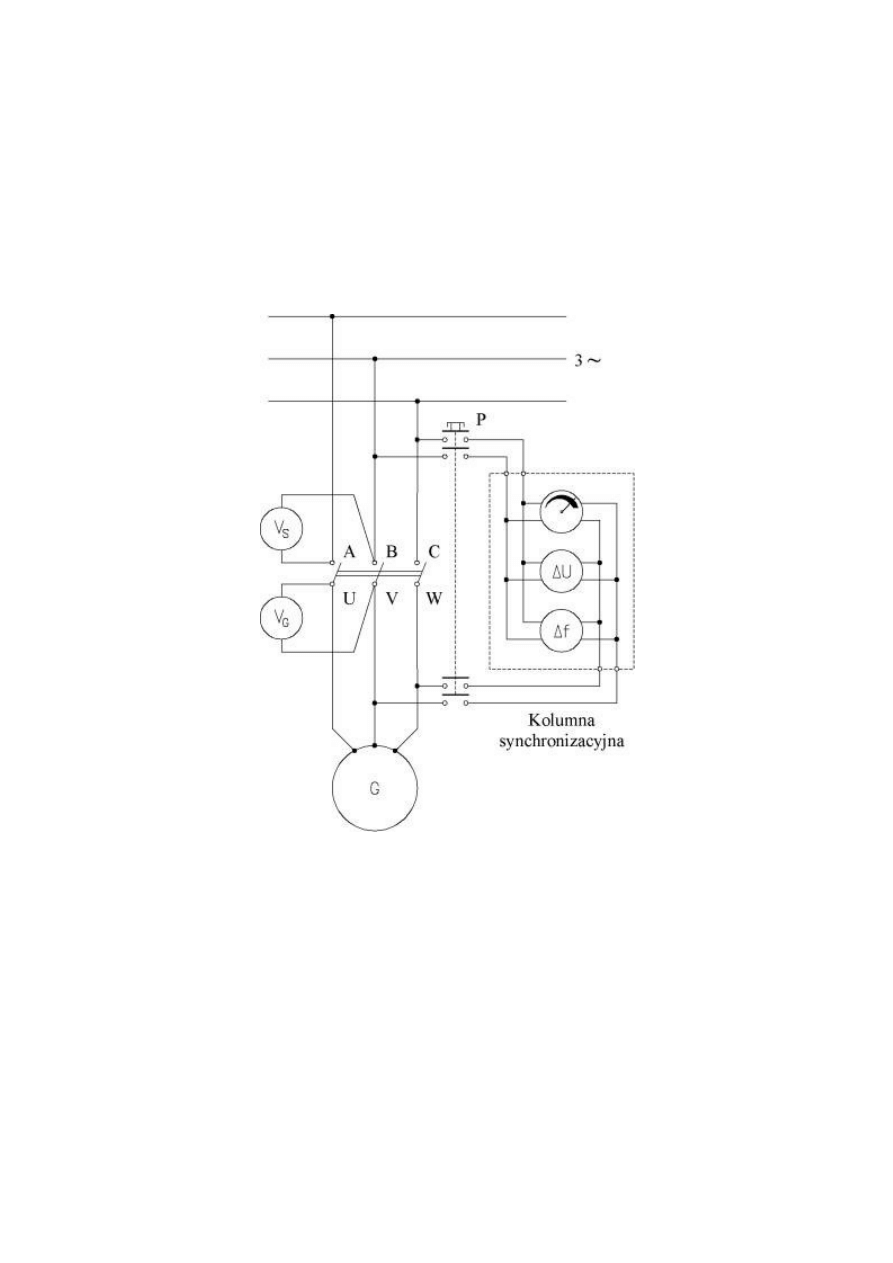
92
Ponieważ kolumna synchronizacyjna jest urządzeniem jednofazowym, przed przystąpieniem do
synchronizacji należy, za pomocą wskaźnika kolejności faz, stwierdzid prawidłowośd przyłączenia
prądnicy do stycznika synchronizacyjnego. Ze względu na możliwośd uszkodzenia przyrządów
kolumny przy dużych różnicach napięd i częstotliwości należy najpierw nastawid zgrubnie U
s
U
G
oraz
f
s
f
G
. Następnie włącza się kolumnę przez wciśnięcie przycisku P i obserwując wskazania U i f,
należy doprowadzid do zrównania napięd i częstotliwości. W chwili gdy wskazówka synchronoskopu
zbliża się do pionowej kreski, należy załączyd stycznik sprzęgający maszynę z siecią. W dwiczeniu
należy przeprowadzid synchronizację obydwiema opisanymi metodami.
Rys. 22.2. Schemat układu synchronizującego z kolumną synchronizacyjną
3.2
Pomiary krzywych V (Mordeya)
Krzywe V przedstawiają zależnośd prądu twornika I
a
od prądu wzbudzenia I
f
przy stałych wartościach
napięcia twornika U, mocy czynnej P oraz częstotliwości. Ilustrują one zachowanie się maszyny
synchronicznej pracującej równolegle z siecią sztywną w całym zakresie możliwych zmian prądu
wzbudzenia.
Schemat pomiarowy przedstawiono na rys. 22.3. Prądnica synchroniczna połączona jest ze
stycznikiem synchronizującym przez zestaw pomiarowy umożliwiający pomiar mocy trójfazowej,
prądu oraz napięcia twornika. Sied sztywną reprezentują zaciski wtórne autotransformatora
93
regulacyjnego zasilanego z sieci energetycznej. Silnikiem napędowym jest bocznikowy silnik prądu
stałego.
Po uruchomieniu silnika i wzbudzeniu prądnicy do napięcia znamionowego należy załączyd wyłącznik
W
1
i nastawid, za pomocą autotransformatora, napięcie sieci na wartośd U
n
. Następnie (w sposób
opisany w p. 3.1) zsynchronizowad prądnicę z siecią.
Wyznaczanie krzywych V rozpocząd od krzywej dla P = 0. Prąd wzbudzenia należy zwiększyd do
wartości znamionowej. Watomierz w zestawie pomiarowym, powinien wskazywad zero. Moc czynną
ewentualnie koryguje się regulując prąd wzbudzenia silnika napędowego, np. jeśli watomierz wychyla
się w prawo, co oznacza, że prądnica generuje moc czynną, należy zmniejszyd moment napędowy
przez zwiększenie prądu wzbudzenia silnika. Prąd wzbudzenia prądnicy należy stopniowo zmniejszad
do zera. Prąd twornika będzie początkowo malał do wartości bliskiej zeru, a następnie rósł do U
n
/ X
d
(rys. 22.4). Prawa gałąź otrzymanej w ten sposób krzywej V odpowiada pracy prądnicy przy
przewzbudzeniu. Maszyna zachowuje się względem sieci jak kondensator, pobierając moc bierną
pojemnościową (wytwarza moc bierną indukcyjną). Ten zakres pracy jest wykorzystywany przy pracy
kompensatorowej maszyny synchronicznej. Lewa gałąź krzywej odpowiada niedowzbudzeniu
prądnicy. Stanowi ona dla sieci obciążenie bierne indukcyjne. Gdy prąd wzbudzenia jest równy zeru,
maszyna synchroniczna stanowi trójfazowy odbiornik indukcyjny o reaktancji równej X
d
.
W podobny sposób wyznacza się krzywe V dla P = 0,25; 0,5; 0,75; i 1,0·P
n
. Pomiar rozpoczyna się od
przewzbudzenia prądnicy do wartości odpowiadającej 1,2·I
n
i nastawienia odpowiedniej mocy
czynnej przez zmianę prądu wzbudzenia silnika. Następnie stopniowo zmniejszając prąd wzbudzenia
prądnicy mierzy się prąd twornika i prąd wzbudzenia, upewniając się, czy moc czynna pozostaje na
zadanym poziomie. Kontrolowad również należy stałośd napięcia na zaciskach sieci i za pomocą
autotransformatora korygowad ewentualne różnice. Podobnie jak przy P = 0, prąd twornika
początkowo maleje, a następnie zwiększa się. Należy starad się uchwycid punkty, w których prąd ma
wartośd najmniejszą. Odpowiadają one obciążeniu przy cos
= 1,0 a krzywa łącząca je jest obrazem
charakterystyki regulacji przy obciążeniu czysto czynnym.
Aby zapobiec wypadnięciu prądnicy z synchronizmu prąd wzbudzenia nie jest zmniejszany do zera jak
przy P = 0, lecz do tzw. granicy stabilności. Prąd wzbudzenia odpowiadający, przy danej mocy P,
granicy stabilności można dla badanej maszyny oszacowad według wzoru
(22.1)
Przy małych prądach wzbudzenia i dużej mocy czynnej należy szczególnie ostrożnie regulowad
moment napędowy silnika, aby przez jego gwałtowny wzrost nie doprowadzid do utraty
synchronizmu. W przypadku wypadnięcia prądnicy z synchronizmu, co manifestuje się wahaniem
wskazówek przyrządów oraz nierównomiernym biegiem maszyny, należy natychmiast wyłączyd
stycznik synchronizacyjny i powtórnie zsynchronizowad. Wyniki pomiarów zestawid w tabeli 22.1.
W tabeli:
94
(22.2)
Na podstawie otrzymanych wyników należy wykreślid krzywe V (rys. 22.4) oraz charakterystyki
cos
= f(I
f
) (rys. 22.5).
Tabela 22.1
U = U
n
, f = 50Hz
Lp.
I
u
I
v
I
w
I
śr
I
f
cos
Uwagi
A
A
A
A
A
–
P = 0
P = 0,25·P
n
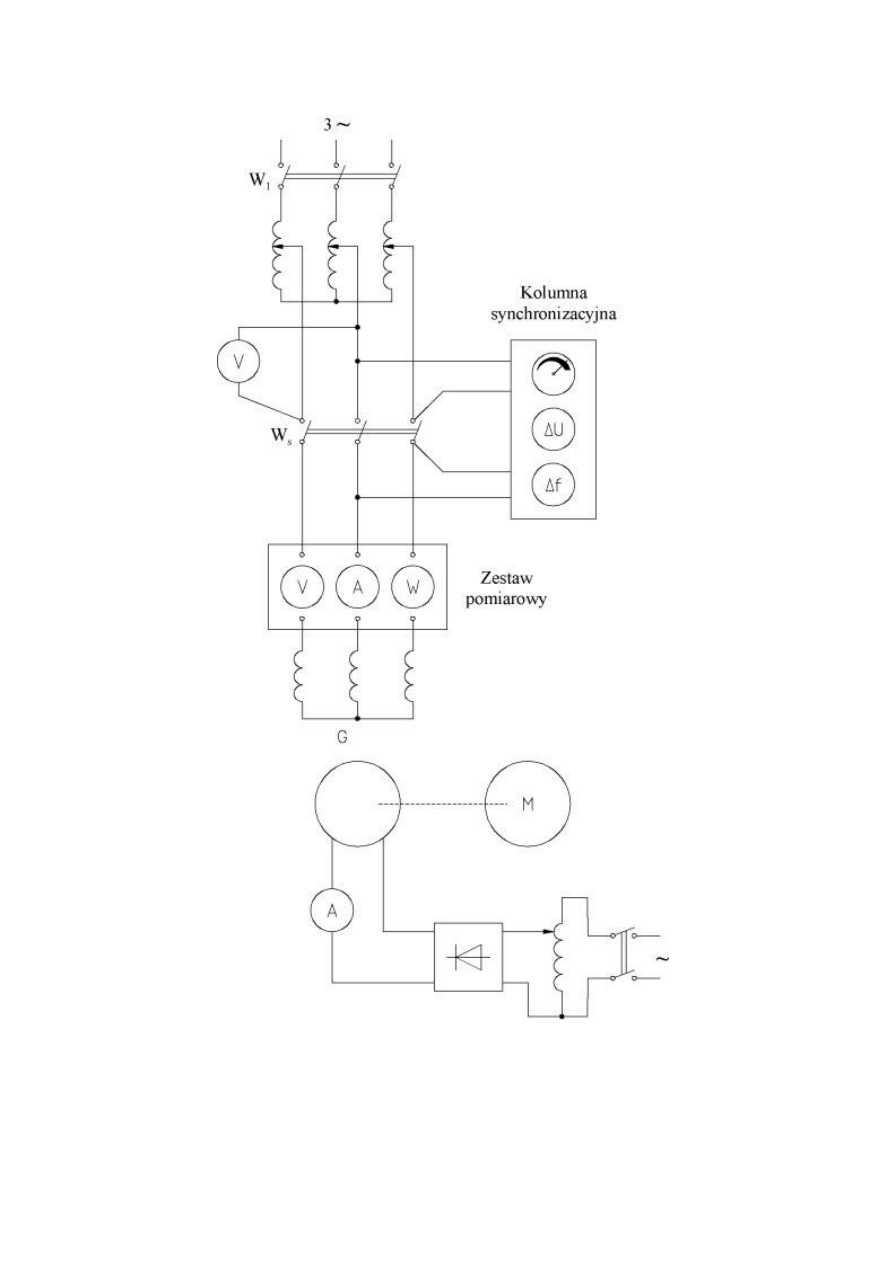
95
Rys. 22.3. Układ do pomiaru krzywych V
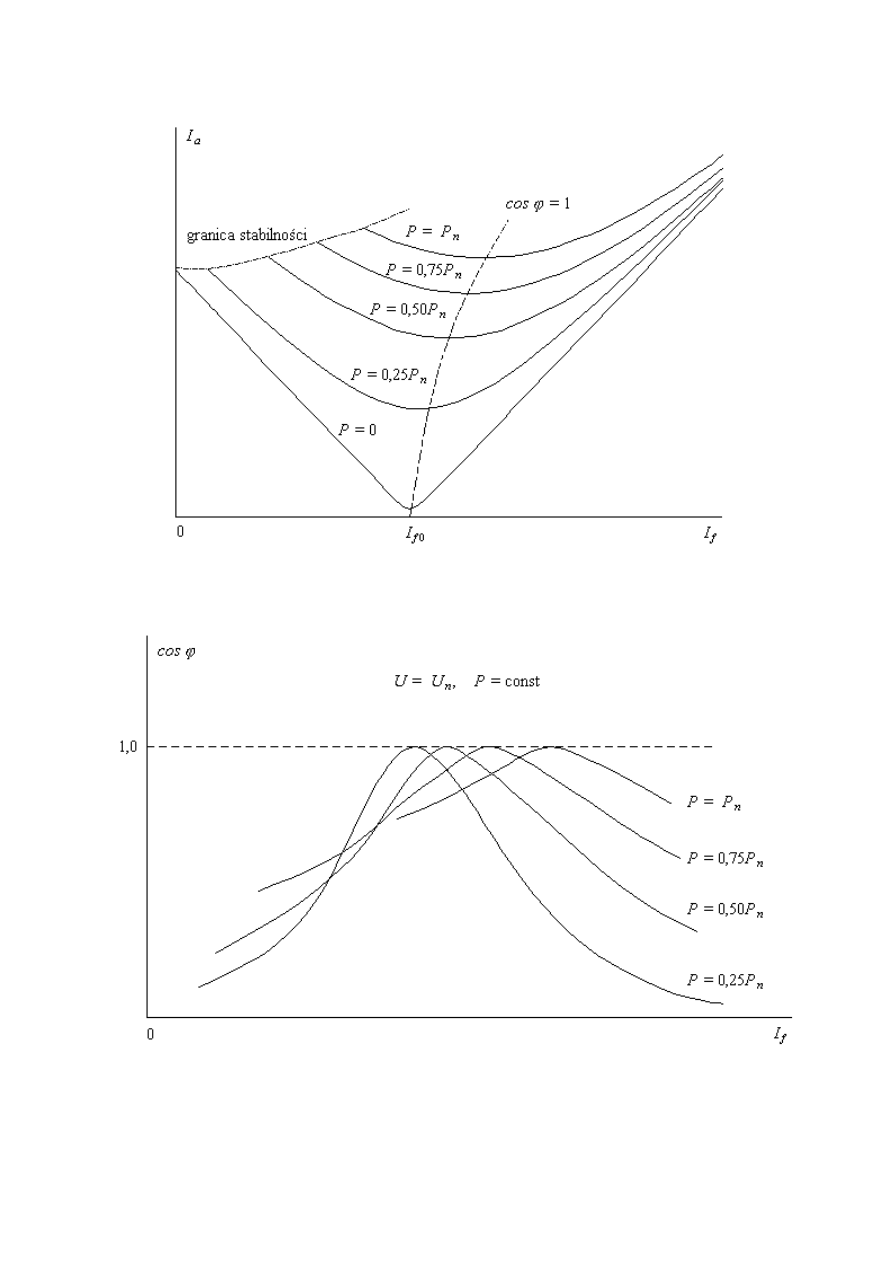
96
Rys. 22.4. Krzywe V
Rys. 22.5. Charakterystyki cos
= f(I
f
) przy P = const
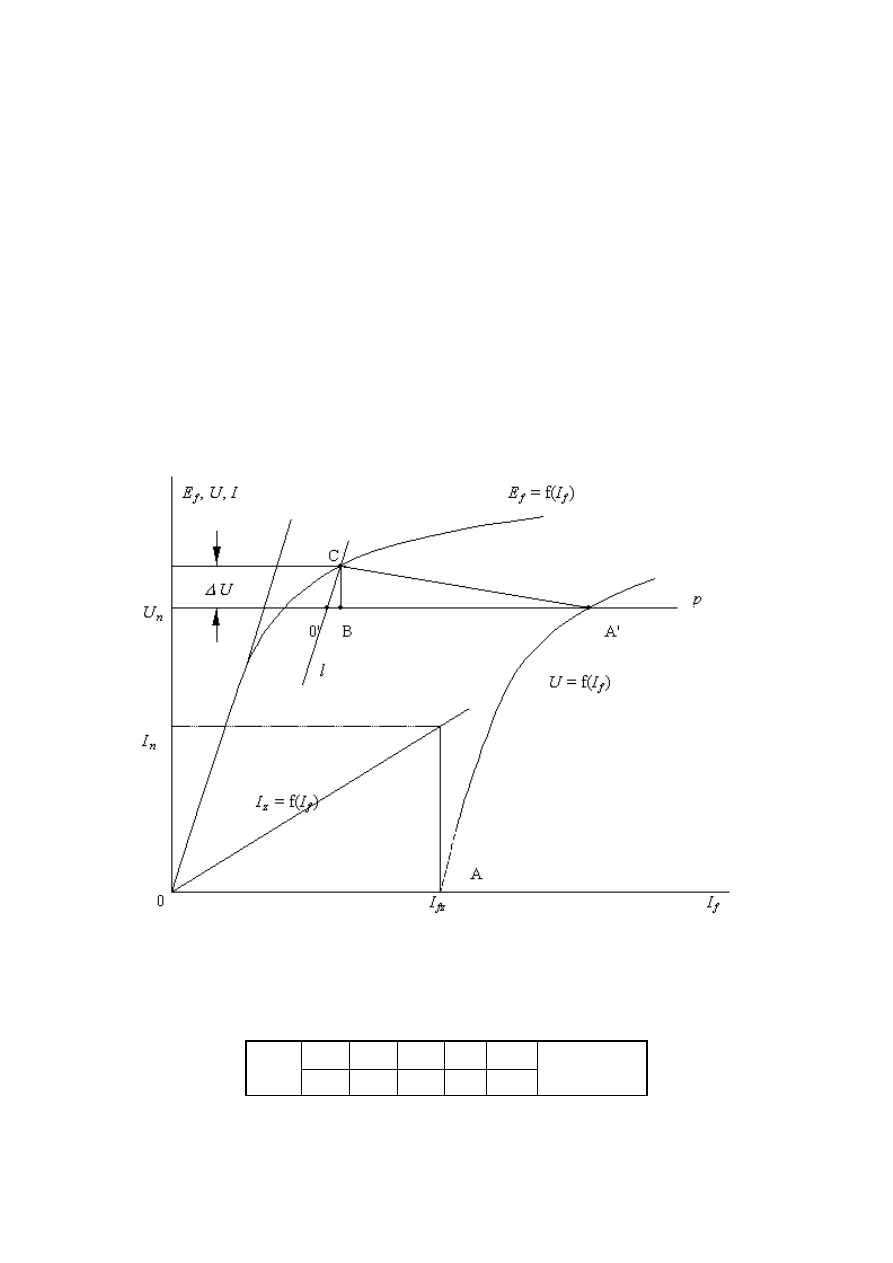
97
3.3
Wyznaczenie charakterystyki obciążenia
Charakterystyka obciążenia jest to zależnośd napięcia twornika maszyny synchronicznej od prądu
wzbudzenia przy stałym prądzie twornika i stałym współczynniki mocy (U = f(I
f
) przy I = const i
cos
= const). Największe znaczenie praktyczne ma charakterystyka obciążenia wyznaczana dla I = I
n
oraz cos
= 0 ind., ponieważ jest ona wykorzystywana do wyznaczania reaktancji Potiera. Ta
charakterystyka zostanie wyznaczona w ramach niniejszego dwiczenia.
Układ pomiarowy jak na rys. 22.3. Po zsynchronizowaniu maszyny z siecią zwiększa się, za pomocą
autotransformatora, napięcie na jej zaciskach do około 1,1·U
n
. Przy tej wartości napięcia należy tak
zwiększad prąd wzbudzenia, aby otrzymad prąd twornika równy prądowi znamionowemu przy P = 0.
Jest to pierwszy punkt charakterystyki obciążenia. Następne punkty uzyskuje się zmniejszając
stopniowo napięcie twornika i prądu wzbudzenia, tak aby prąd twornika pozostawał stały. Prąd
wzbudzenia silnika należy tak regulowad, aby moc czynna była równa zeru. Pomiary należy zakooczyd,
gdy U = 0,3·U
n
. Wyniki pomiarów zestawid w tabeli 22.2.
Rys. 22.6. Konstrukcja do wyznaczania reaktancji Potiera
Tabela 22.2
Lp.
I
f
U
1
U
2
U
3
U
śr
Uwagi
A
V
V
V
V
98
I
a
= I
n
cos
= 0
ind
f = f
n
Na podstawie pomiarów wykreślid charakterystykę obciążenia na wspólnym wykresie z
charakterystyką biegu jałowego i charakterystyką zwarcia trójfazowego wyznaczonych w ramach
dwiczenia 21 (rys. 22.6). Punkty charakterystyki w zakresie napięd poniżej 0,3·U
n
leżą na prostej
przechodzącej przez punkt A wyznaczony na podstawie charakterystyki zwarcia.
3.4
Wyznaczanie reaktancji Potiera
Duże znaczenie praktyczne przy analizie pracy maszyny synchronicznej ma reaktancja rozproszenia
twornika. Pomiar tej reaktancji jest dośd kłopotliwy, gdyż wymaga wyjęcia wirnika. Dlatego
reaktancję tę często zastępuje się zbliżoną do niej reaktancją Potiera X
p
, która w wielu przypadkach
dostatecznie dokładnie ją zastępuje. Znalezienie wartości X
p
polega na uprzednim wyznaczeniu tzw.
trójkąta Potiera (rys. 22.6), którego przyprostokątna CB przedstawia stratę napięcia U = I
n
·X
p
. Aby
wyznaczyd punkt C, na lewo od punktu A’ na prostej poziomej odkłada się odcinek A’0’ = A0. Przez
punkt 0’ prowadzi się prostą l równoległą do prostoliniowej części ch.b.j. Prosta ta przecina ch.b.j. w
punkcie C. Pionowy odcinek CB jest równy indukcyjnej stracie napięcie U na reaktancji Potiera, a
zatem
(22.3)
3.5
Wyznaczenie zmienności napięcia i znamionowego prądu wzbudzenia
Znajomośd charakterystyki biegu jałowego, zwarcia oraz reaktancji Potiera pozwala na wyznaczenie
zmienności napięcia i znamionowego prądu wzbudzenia. Jest wiele metod wyznaczania tych
parametrów. W dwiczeniu będzie wykorzystana metoda uproszczonego wykresu amerykaoskiego,
który może byd stosowany zarówno do maszyn cylindrycznych, jak i maszyn o biegunach jawnych.
Ideę tego wykresu przedstawiono na rysunku 22.7.
Na osi rządnych zaznacza się wektor U
n
oraz pod kątem
n
do niego wektor I
n
. Do wektora U
n
dodaje
się, prostopadle do kierunku wektora I
n
, stratę napięcia na reaktancji Potiera
. Powstały
w ten sposób wektor E
p
, równy SEM odpowiadającej strumieniowi szczelinowemu maszyny, przenosi
się łukiem na oś rzędnych. Następnie kreśląc linię poziomą, znajduje się przyrost prądu
I
f
, który
kompensuje nasycenie obwodu magnetycznego. Do prądu I
f
, odpowiadającemu napięciu
znamionowemu przy nienasyconym obwodzie magnetycznym, dodaje się (z punktu A) równolegle do
wektora I
n
odpowiadający tej wartości prąd wzbudzenia z charakterystyki zwarcia I
fz
. Powstały w ten
sposób odcinek 0B reprezentuje prąd wzbudzenia prądnicy przy obciążeniu, lecz bez uwzględnienia
nasycenia. Korektę ze względu na nasycenie obwodu magnetycznego wprowadza się dodając do
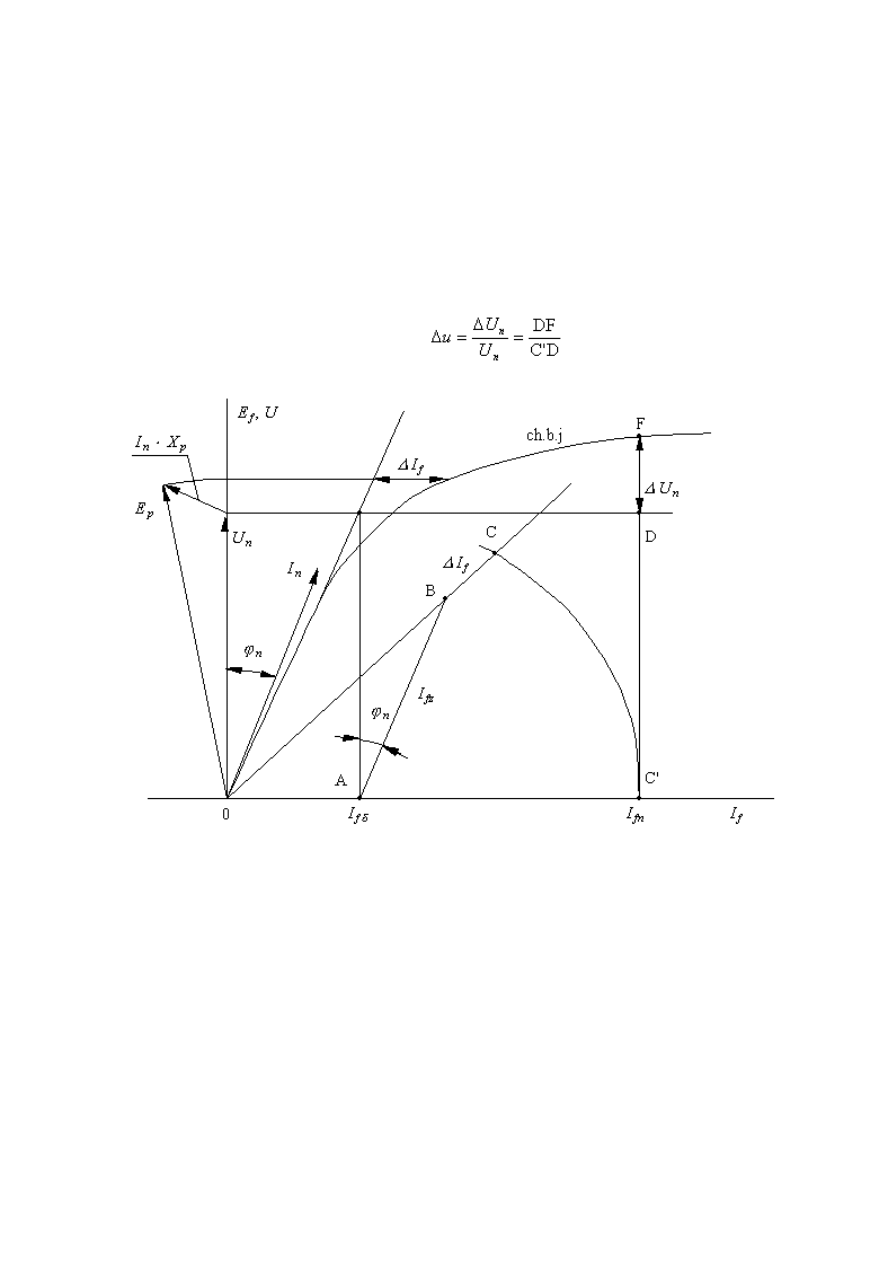
99
odcinka 0B odcinek BC równy I
f
. Odcinek 0C odkłada się za pomocą łuku na oś odciętych i otrzymuje
się punkt C’ odpowiadający szukanej wartości znamionowego prądu wzbudzenia I
fn
.
W podobny sposób można wyznaczyd prąd wzbudzenia dla dowolnej wartości prądu obciążenia i
współczynnika mocy. Na odcinku pionowym przechodzącym przez punkt C’ znajduje się odcinek DF.
Wskazuje on o ile wzrośnie napięcie twornika, jeśli prądnica pracująca przy znamionowym obciążeniu
i stałym prądzie wzbudzenia zostanie odciążona. Ten wzrost napięcia, odniesiony do napięcia
znamionowego, jest nazywany zmiennością napięcia
u
(22.4)
Rys. 22.7. Wyznaczanie zmienności napięcia i znamionowego prądu wzbudzenia metodą uproszczonego
wykresu amerykaoskiego
4
Sprawozdanie z ćwiczenia
Sprawozdanie z dwiczenia powinno zawierad:
protokół z pomiarów,
wykresy krzywych V (I = f(I
f
) przy P = const),
wykresy charakterystyk cos
= f(I
f
) przy P = const,
wyznaczenie reaktancji Potiera,
wyznaczenie znamionowego prądu wzbudzenia i znamionowej zmienności napięcia metodą
wykresu amerykaoskiego,
uwagi i wnioski.

100
5
Pytania kontrolne
Podad warunki synchronizacji maszyny synchronicznej z siecią.
Opisad znane metody synchronizacji.
Co należy zrobid, aby po zsynchronizowaniu prądnicy z siecią obciążyd ją mocą czynną?
Jaki charakter wykazuje maszyna synchroniczna „przewzbudzona”, a jaki „niedowzbudzona”? Co
należy rozumied przez te określenia?
Uzasadnid, dlaczego minima krzywych V odpowiadają obciążeniu czysto czynnemu maszyny.
Co to jest granica stabilności? Opisad zjawisko utraty synchronizmu.
Opisad metodę wyznaczania reaktancji Potiera.
Opisad metodę wykresu amerykaoskiego wyznaczania prądu wzbudzenia i zmienności napięcia.
101
ĆWICZENIE 23
WYZNACZANIE PARAMETRÓW MASZYNY SYNCHRONICZNEJ
JAWNOBIEGUNOWEJ
1
Program ćwiczenia
Pomiar rezystancji uzwojenia twornika R
a
.
Pomiar reaktancji synchronicznej podłużnej X
d
.
Pomiar reaktancji synchronicznej poprzecznej X
q
.
Pomiar reaktancji podprzejściowej podłużnej X
d
”.
Pomiar reaktancji podprzejściowej poprzecznej X
q
”.
Pomiar reaktancji dla składowej przeciwnej X
2
.
Pomiar reaktancji dla składowej zerowej X
0
.
2
Cel ćwiczenia
Zachowanie się maszyny synchronicznej w różnych warunkach pracy można określad na podstawie jej
parametrów, bez konieczności wykonywania pomiarów bezpośrednich, które w przypadku maszyn
bardzo dużych mocy są dośd kłopotliwe. Ze względu na skomplikowany układ jakim jest wirująca
maszyna synchroniczna, zwłaszcza w stanach nieustalonych, dokładny opis jej zachowania wymaga
znajomości dużej liczby parametrów. W dwiczeniu ograniczono się do wyznaczenia podstawowych
parametrów decydujących o początkowych i ustalonych wartościach prądów zwarciowych oraz o
zachowaniu się maszyny w stanie ustalonym.
3
Omówienie programu ćwiczenia
3.1
Wiadomości wstępne
3.1.1
Reaktancja synchroniczna
Reaktancja synchroniczna to reaktancja jaką maszyna synchroniczna wirująca z prędkością
synchroniczną stanowi dla 3-fazowego układu prądów kolejności zgodnej. Jeśli zatem na zaciski
twornika nie wzbudzonej maszyny wirującej z prędkością synchroniczną załączy się symetryczne
napięcie trójfazowe o kolejności zgodnej U
1
(rys. 23.la), to w uzwojeniu twornika popłynie prąd I
1
,
który przy założeniu, że rezystancja uzwojenia jest pomijalnie mała, można wyrazid wzorem
(23.1)
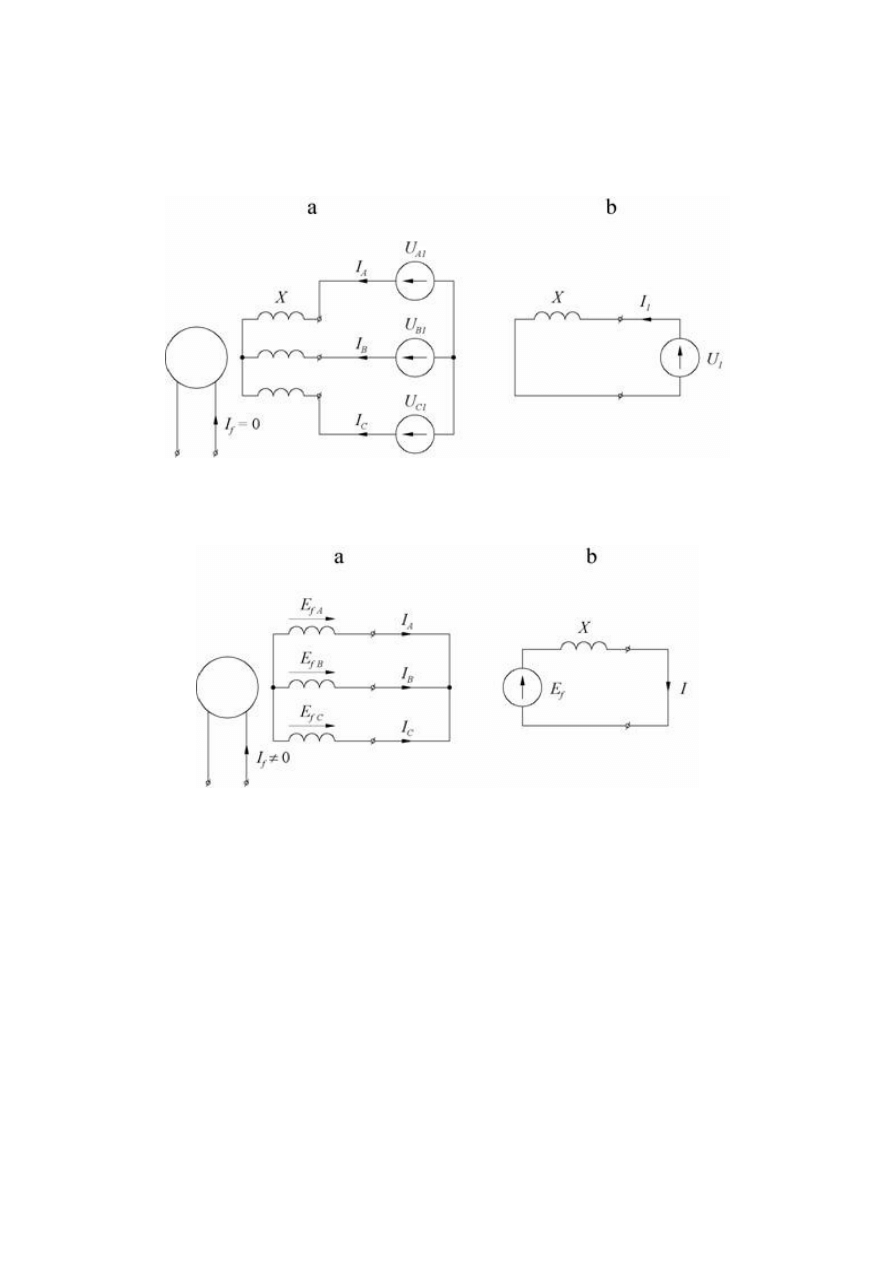
102
w którym X oznacza reaktancję synchroniczną maszyny. Podobna zależnośd będzie obowiązywała,
jeśli zewnętrzne napięcie przyłożone do twornika zastąpid SEM E
f
indukowaną w tworniku, tzn. jeśli
maszyna jest wzbudzona, a zaciski twornika są zwarte tak, jak to przedstawiono na rys. 23.2.
Rys. 23.1. Maszyna synchroniczna nie wzbudzona z symetrycznym zewnętrznym źródłem napięcia: a) schemat
trójfazowy, b) schemat jednofazowy
Rys. 23.2. Maszyna synchroniczna wzbudzona, zwarta: a) schemat trójfazowy, b) schemat jednofazowy
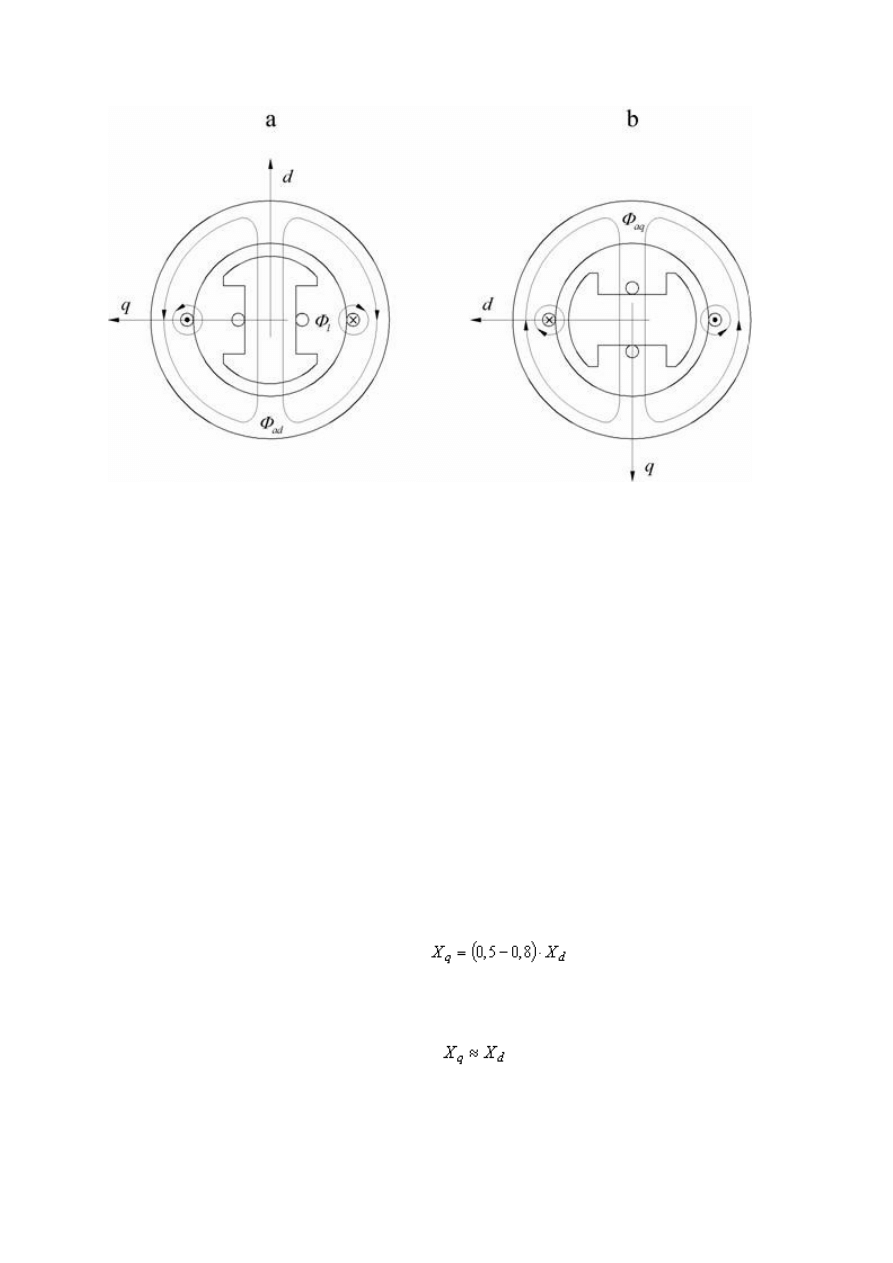
103
Rys. 23.3. Ustawienie wirnika maszyny synchronicznej względem strumienia twornika: a) podłużne,
b) poprzeczne
Reaktancja uzwojenia jest związana z odpowiadającą jej indukcyjnością L, a ta z kolei zależy od
przewodności magnetycznej (permeancji) drogi strumienia magnetycznego wzbudzanego przez prąd
rozpatrywanego uzwojenia. Symetryczny układ prądów kolejności zgodnej wytwarza strumieo
magnetyczny, wirujący względem stojana w tym samym kierunku i z tą samą prędkością co wirnik, a
zatem nieruchomy względem niego. W ogólnym przypadku oś strumienia twornika może byd, w
zależności od charakteru obciążenia maszyny, przesunięta względem osi podłużnej twornika o
dowolny kąt, od –90 do +90. W maszynach o biegunach jawnych, ze względu na zmianę długości
szczeliny powietrznej wzdłuż obwodu twornika, reluktancja na drodze strumienia, a zatem i
odpowiadająca jej reaktancja, będzie zależała od wzajemnego położenia osi strumienia twornika i osi
wirnika. Wartośd reaktancji jest zawarta między dwiema ekstremalnymi wartościami X
d
i X
q
odpowiadającymi odpowiednio podłużnemu i poprzecznemu ustawieniu obydwu osi (rys. 23.3).
Reaktancje X
d
i X
q
są nazywane odpowiednio podłużną i poprzeczną reaktancją synchroniczną. Dla
maszyn o biegunach jawnych
(23.2)
a dla maszyn o wirnikach cylindrycznych
(23.3)
W powszechnie stosowanej metodzie analizy pracy maszyn synchronicznych, tzw. transformacji
Parka, prądy oraz odpowiadające im przepływy i strumienie są rozkładane na składowe w osiach d i q.
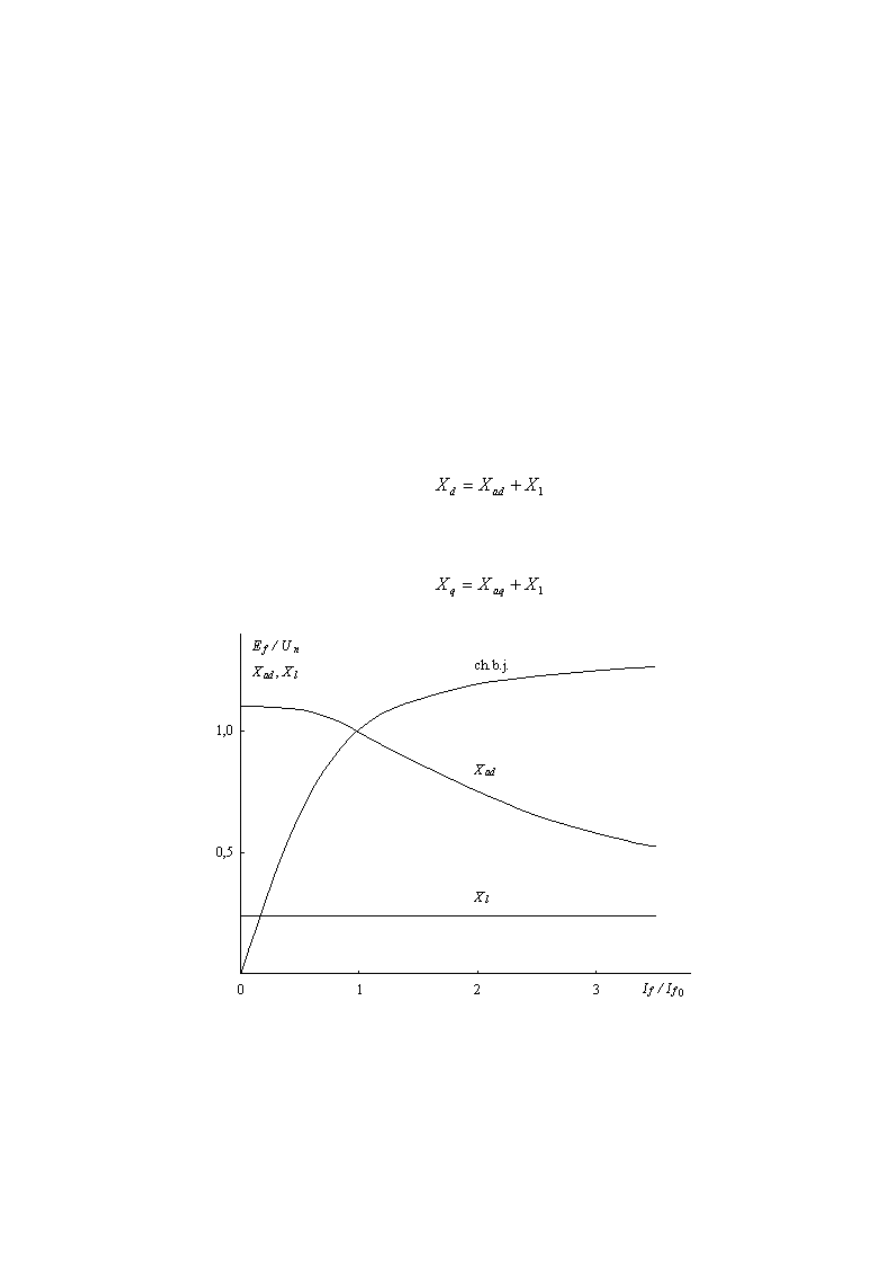
104
Pozwala to na stosowanie przy analizie dowolnego obciążenia maszyny tylko dwóch stałych wartości
reaktancji odpowiadających tym osiom (X
d
i X
q
), zamiast reaktancji której wartośd zależy od
warunków obciążenia. Składowe strumienia twornika w osiach d i q są zwykle dzielone na dwie
części, z których jedna, zwana strumieniem oddziaływania twornika, zamyka się poprzez wirnik (
ad
lub
aq
), a druga, zwana strumieniem rozproszenia
1
, zamyka się wokół uzwojenia twornika głównie
przez powietrze (rys. 23.2a,b). Celem tego podziału jest wyodrębnienie całkowitego strumienia tej
części twornika, która przechodząc przez żelazo stojana i wirnika, wpływa na stan nasycenia obwodu
magnetycznego maszyny.
Takiemu podziałowi strumieni odpowiada podział reaktancji synchronicznej na reaktancję
oddziaływania twornika (X
ad
i X
aq
) oraz reaktancję rozproszenia X
1
. Należy zauważyd, że strumienie
rozproszenia twornika nie zależą od wzajemnego usytuowania osi twornika i wirnika, toteż
odpowiadające im reaktancje mają taką samą wartośd w obydwu osiach
Zatem dla osi podłużnej
(23.4)
a dla osi poprzecznej
(23.5)
Rys. 23.4. Zależnośd reaktancji X
ad
od stanu nasycenia obwodu magnetycznego maszyny
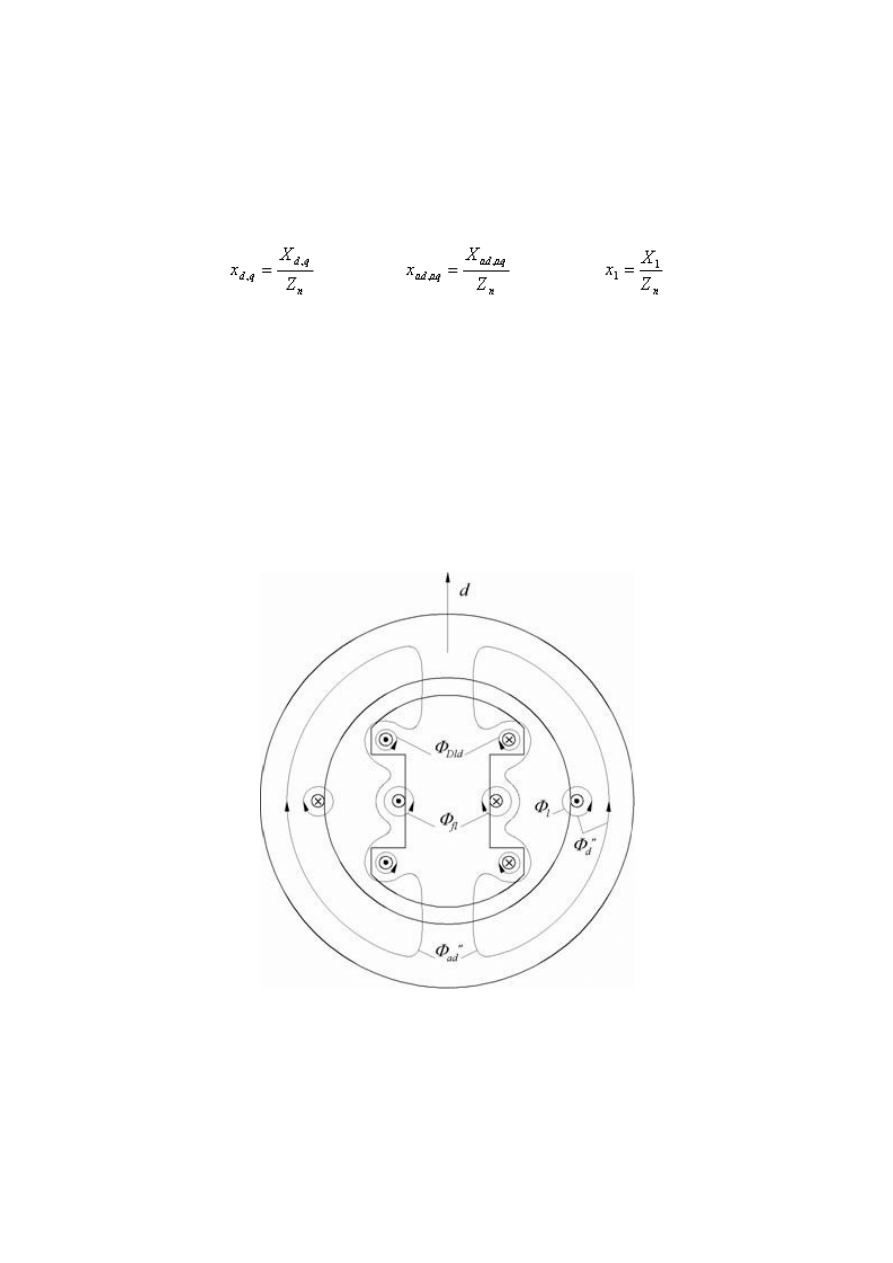
105
Reaktancja rozproszenia X
1
ma wartośd stałą, niezależną od nasycenia, natomiast reaktancja
oddziaływania twornika (zwłaszcza w osi podłużnej) zmienia się wraz z nasyceniem w dośd dużych
granicach (rys. 23.4). Wartości reaktancji są zwykle podawane w jednostkach względnych jako
stosunek ich bezwzględnej wartości do tzw. impedancji znamionowej Z
n
= U
n
/ I
n
. Wartości względne
są oznaczane małymi literami
;
;
(23.6)
3.1.2
Reaktancja podprzejściowa podłużna
Reaktancja podprzejsciowa podłużna maszyny synchronicznej X
d
” jest to reaktancja jaką maszyna
stanowi dla pierwszej harmonicznej prądu twornika w pierwszej chwili po nagłym trójfazowym
zwarciu, jeśli oś podłużna wirnika pokrywa się z osią wypadkowego przepływu stojana. Reaktancja ta
jest określona permeancją drogi strumienia magnetycznego twornika w chwili zwarcia udarowego.
Obraz tego strumienia przedstawiono na rys. 23.5. Dla przejrzystości nie pokazano na rysunku
strumienia wytwarzanego przez prąd wzbudzenia.
Rys, 23.5. Drogi strumieni magnetycznych w osi podłużnej w chwili zwarcia udarowego.
W chwili zwarcia udarowego prąd zwarciowy twornika wytwarza strumieo, który, podobnie jak w p.
3.1.1, można podzielid na: strumieo rozproszenia
1
i strumieo przenikający przez wirnik
ad
’’. Na
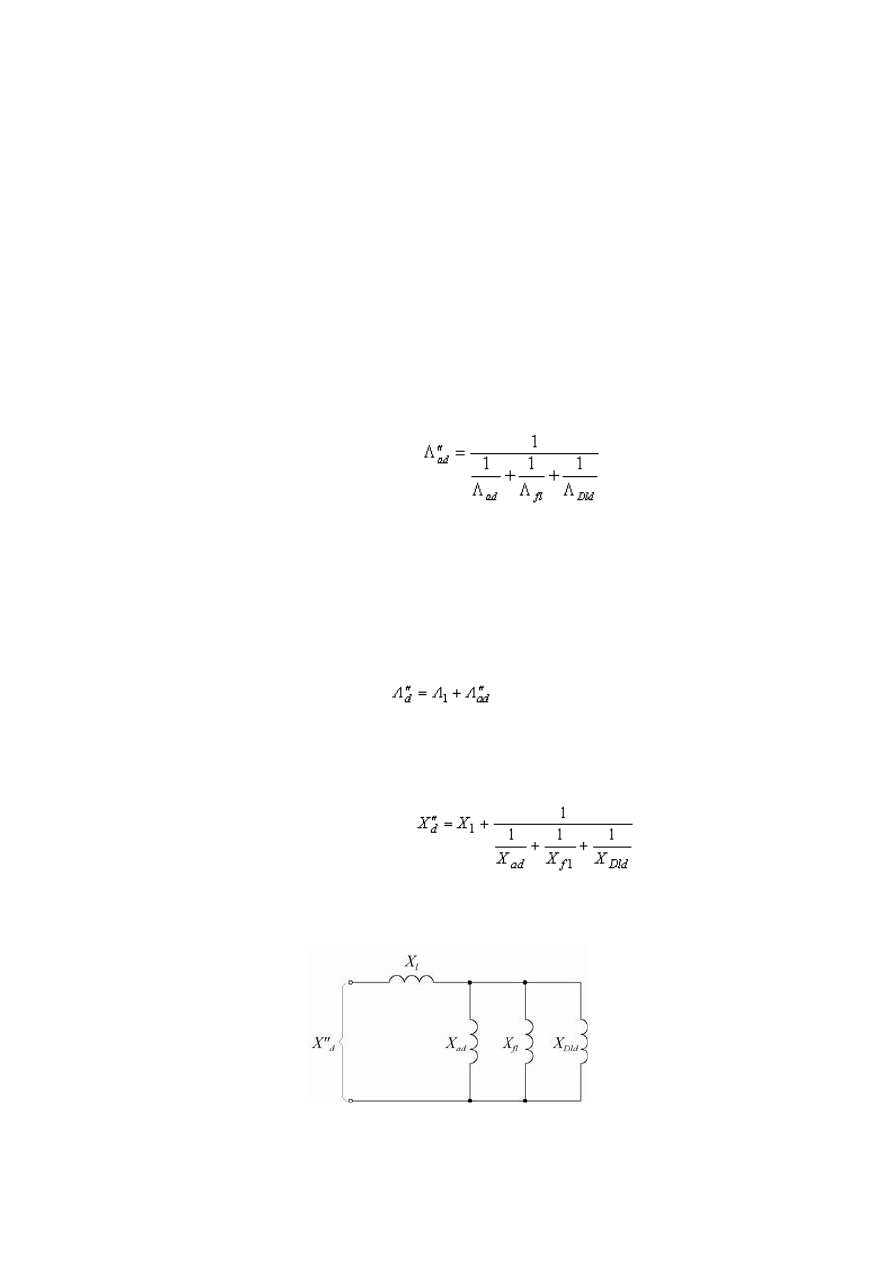
106
wirniku znajdują się dwa obwody zamknięte: uzwojenie wzbudzenia oraz uzwojenie tłumiące (klatka
tłumiąca lub lity blok wirnika). Ponieważ strumieo sprzężony z obwodem zamkniętym nie może się
zmieniad skokowo, w obwodach wirnika indukują się, pod wpływem strumienia
ad
’’, prądy o takich
wartościach, że wytworzony przez nie strumieo jest równy i przeciwnie skierowany do strumienia
ad
’’.
Całkowity strumieo sprzężony z twornikiem w pierwszej chwili zwarcia
ad
’’ jest zatem superpozycją
strumienia od prądu twornika oraz sprzężonej z nim i przeciwnie skierowanej części strumienia
wytworzonego przez prądy wyindukowane w zamkniętych obwodach wirnika. Obwody te ekranują
wirnik przed nagłym wnikaniem strumienia zewnętrznego, toteż przechodzący przez szczelinę
strumieo oddziaływania twornika
”
ad
w pierwszej chwili zwarcia zamyka się głównie na drogach
strumieni rozproszenia klatki tłumiącej i uzwojenia wzbudzenia. Permeancja drogi tego strumienia
może byd wyrażona wzorem
(23.7)
w którym:
ad
– permeancja podłużnego strumienia oddziaływania twornika, równa w przybliżeniu
permeancji szczeliny powietrznej,
f1
– permeancja strumienia rozproszenia uzwojenia wzbudzenia,
Dld
– permeancja strumienia rozproszenia klatki tłumiącej w osi podłużnej.
Permeancja całkowitego strumienia twornika w osi podłużnej w pierwszej chwili zwarcia wynosi
(23.8)
Reaktancje są proporcjonalne do odpowiadających im permeancji, zatem uwzględniwszy (23.7) i
(23.8), można napisad
(23.9)
Zależności tej odpowiada schemat zastępczy przedstawiony na rysunku 23.6.
Rys. 23.6. Schemat zastępczy reaktancji podprzejściowej podłużnej X
”
d
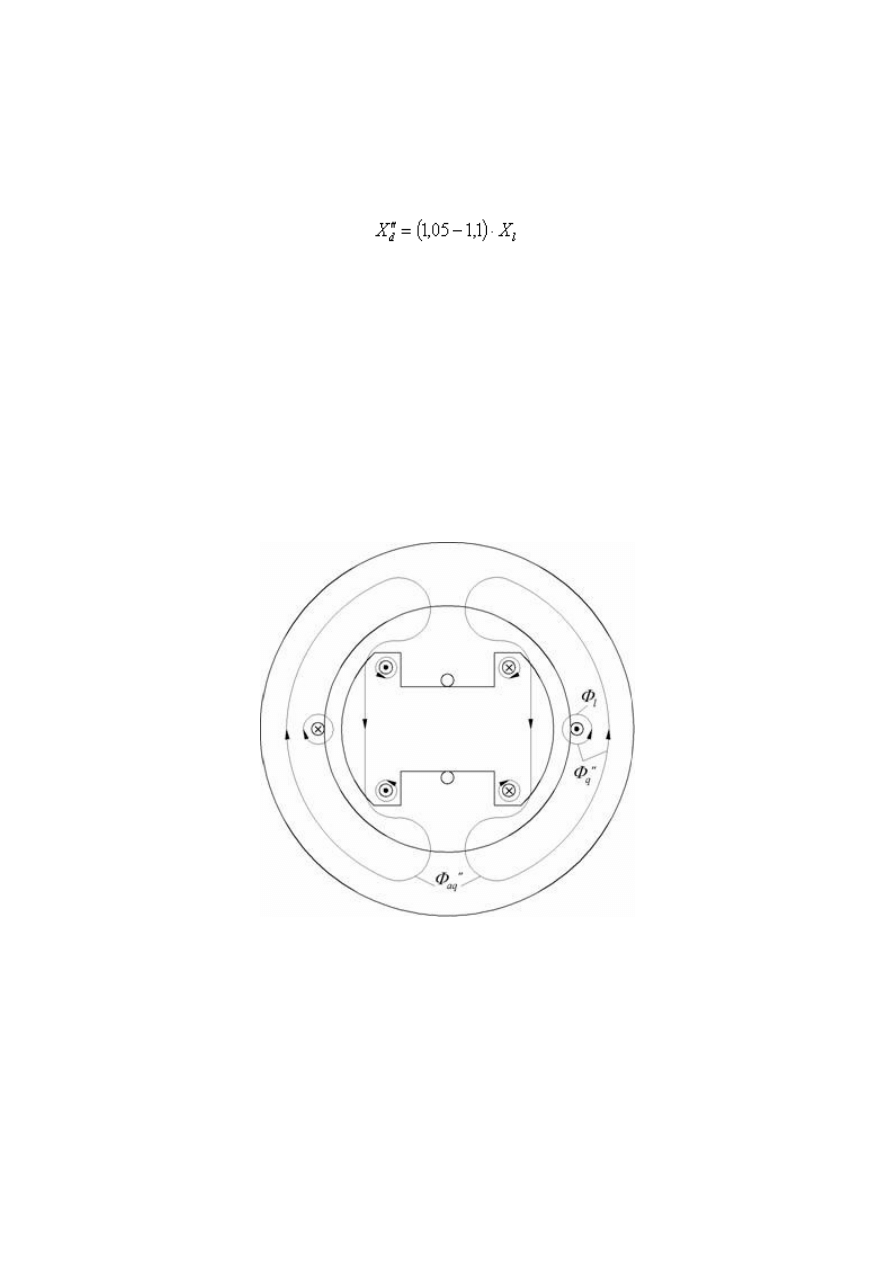
107
Ponieważ reaktancje X
f1
i X
Dld
są małe w porównaniu z X
l
i X
ad
, więc reaktancja X
”
d
jest bliska wartości
reaktancji X
l
. W przybliżeniu można przyjąd, że
(23.10)
3.1.3
Reaktancja podprzejściowa poprzeczna
Reaktancja podprzejściowa poprzeczna X
”
q
to reaktancja jaką maszyna synchroniczna stanowi dla
pierwszej harmonicznej prądu twornika w pierwszej chwili po nagłym trójfazowym zwarciu, w chwili
gdy oś poprzeczna wirnika pokrywa się z osią wypadkowego przepływu stojana.
Przy poprzecznym ustawieniu osi wirnika i przepływu twornika strumieo oddziaływania twornika nie
jest sprzężony z uzwojeniem wzbudzenia. Zatem jedynie w klatce tłumiącej indukuje się prąd, który
wytwarza strumieo przeciwdziałający zmianie strumienia przenikającego przez wirnik (rys. 23.7).
Rys. 23.7. Drogi strumieni magnetycznych w osi poprzecznej w chwili zwarcia udarowego.
Podobnie jak w p. 3.1.2, permeancja drogi całkowitego strumienia twornika w pierwszej chwili po
nagłym zwarciu jest określona wzorem
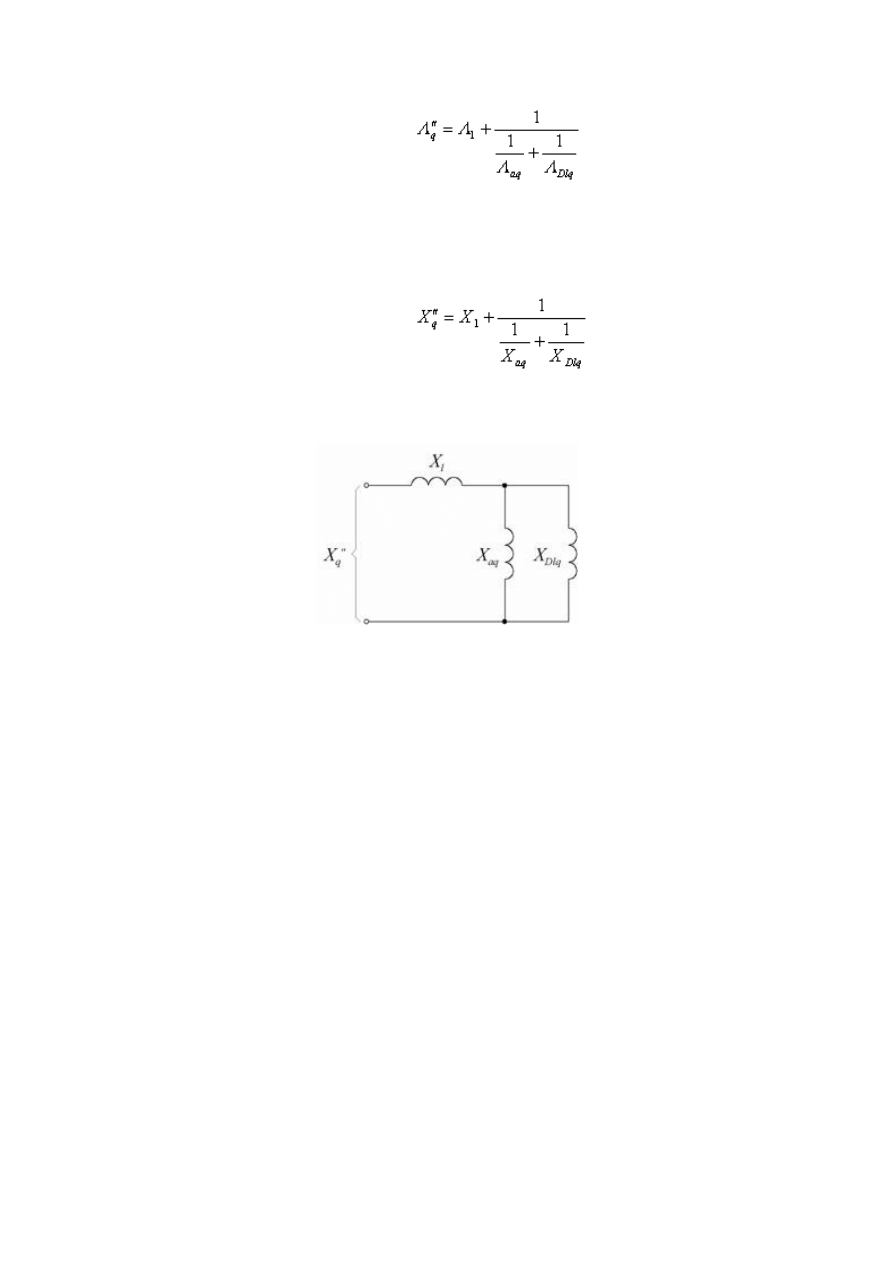
108
(23.11)
w którym:
aq
– permeancja dla strumienia oddziaływania twornika w osi q,
Dlq
– permeancja drogi strumienia rozproszenia klatki tłumiącej w osi q.
Odpowiadająca wzorowi (23.11) zależnośd na reaktancję X
”
q
będzie miała zatem postad
(23.12)
Na rysunku 23.8 przedstawiono schemat zastępczy odpowiadający wzorowi (23.12).
Rys. 23.8. Schemat zastępczy reaktancji podprzejściowej poprzecznej X
”
q
3.1.4
Reaktancja dla składowej przeciwnej
Aby obliczyd prądy płynące w stanach niesymetrycznych pracy maszyny synchronicznej, należy znad
jej parametry dla prądów różnej kolejności. Reaktancja dla składowej przeciwnej X
2
jest rozumiana
jako reaktancja jaką stanowi maszyna wirująca z prędkością synchroniczną dla prądów kolejności
przeciwnej, tzn. takich, które wytwarzają strumieo wirujący w kierunku przeciwnym do kierunku
wirowania wirnika. Reaktancja ta jest równa stosunkowi składowej biernej pierwszej harmonicznej
napięcia o kolejności przeciwnej do pierwszej harmonicznej prądu o kolejności przeciwnej.
Wynikający stąd warunek sinusoidalnej zmienności napięcia i prądu, narzucony metodom
pomiarowym, jest w praktyce trudny do spełnienia, toteż metody pomiarowe wyznaczania reaktancji
X
2
dają wyniki przybliżone. Ponieważ strumieo twornika od prądów kolejności przeciwnej wiruje z
dużą prędkością względem wirnika, więc występuje bardzo silne działanie ekranujące klatki tłumiącej
i uzwojenia wzbudzenia. Strumieo ten jest wypychany poza wirnik i zamyka się na drodze podobnej
do drogi strumieni
”
d
i
”
q
. Zatem i wartośd reaktancji X
2
jest bliska wartościom reaktancji
podprzejściowych X
”
d
i X
”
q
. Jeżeli są one znane, reaktancję X
2
można określid z przybliżonych wzorów:
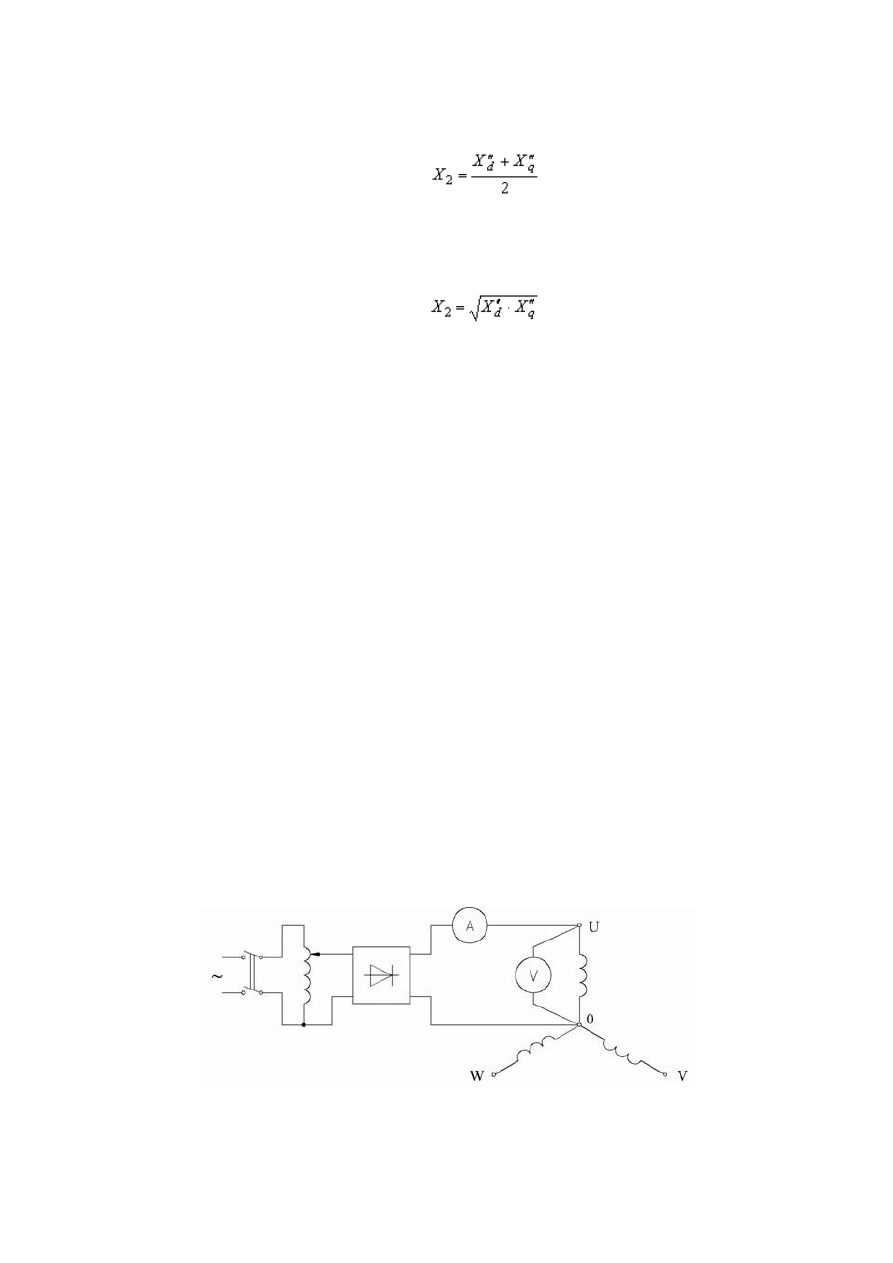
109
a)
przy X
”
d
bliskim X
”
q
(dla turbogeneratorów)
(23.13)
b)
przy X
”
d
znacznie różniącym się od X
”
q
(dla maszyn o biegunach jawnych, zwłaszcza bez
uzwojeo tłumiących)
(23.14)
3.1.5
Reaktancja dla składowej zerowej
Reaktancja dla składowej zerowej X
0
jest to reaktancja jaką maszyna synchroniczna wirująca stanowi
dla prądów kolejności zerowej. Reaktancja X
0
jest równa stosunkowi składowej biernej pierwszej
harmonicznej napięcia fazowego kolejności zerowej, przyłożonego do zacisków twornika maszyny, do
pierwszej harmonicznej prądu fazowego kolejności zerowej. Ponieważ prądy fazowe kolejności
zerowej są ze sobą w fazie, przepływ wypadkowy uzwojenia twornika jest równy zeru. Jedynym
strumieniem jaki jest wzbudzany przez uzwojenie twornika jest strumieo rozproszenia od prądów
kolejności zerowej. Strumieo ten jest mniejszy niż przy odpowiadającej wartości prądu kolejności
zgodnej czy przeciwnej, gdyż w maszynach o uzwojeniu dwuwarstwowym jest pewna liczba żłobków,
zależnych od skrótu uzwojenia, w których prądy kolejności zerowej znoszą się. Z tego powodu
reaktancja X
0
jest mniejsza od X
1
i bardzo zależy od skrótu uzwojenia.
3.2
Sposób wykonania pomiarów
3.2.1
Pomiar rezystancji uzwojenia twornika
Rezystancja uzwojenia twornika jest mierzona prądem stałym, metodą techniczną w układzie jak na
rys. 23.9. Pomiary wykonuje się dla każdej fazy przy trzech różnych wartościach prądu. Wyniki
pomiarów należy zestawid w tabeli 23.1.
Rys. 23.9. Układ do pomiaru rezystancji uzwojenia twornika
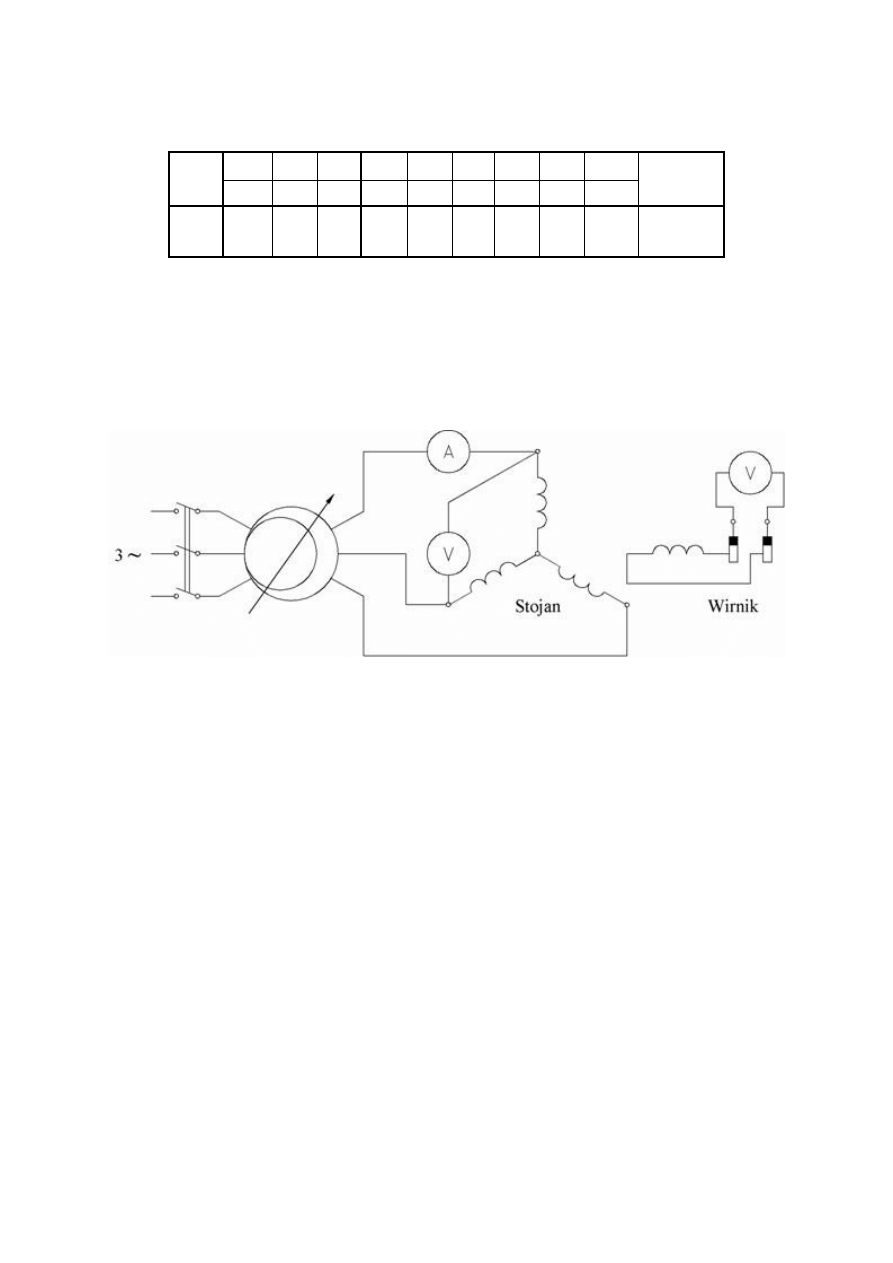
110
Tabela 23.1
Lp.
I
u
U
u
I
v
U
v
I
w
U
w
R
u
R
v
R
w
Uwagi
A
V
A
V
A
V
R
śr
=
3.2.2
Pomiar reaktancji synchronicznej podłużnej i poprzecznej
Reaktancję synchroniczną w osi d i q wyznacza się metodą poślizgu w układzie przedstawionym na
rys. 23.10. Badana maszyna jest napędzana z prędkością zbliżoną do prędkości synchronicznej.
Uzwojenie twornika zasila się obniżonym napięciem trójfazowym o zgodnej kolejności i wartości
około 0,1·U
n
.
Rys. 23.10. Układ do pomiaru reaktancji synchronicznej
Przy tak niskim napięciu zasilającym właściwą kolejnośd faz można ustalid następująco:
wirującą z prędkością synchroniczną maszynę zasilid 3-fazowym napięciem i zmierzyd prąd
pobierany z sieci,
po odłączeniu od sieci zamienid miejscami dwa przewody zasilające, a następnie po
załączeniu tej samej wartości napięcia powtórzyd pomiar prądu twornika.
To połączenie, w którym prąd twornika jest mniejszy odpowiada zgodnej kolejności faz.
Na skutek różnicy prędkości wirowania wirnika i strumienia magnetycznego od prądów stojana oś
tego strumienia pokrywa się okresowo z osią podłużną i osią poprzeczną wirnika. Reaktancja maszyny
zmienia się w granicach od X
q
do X
d
, co można zaobserwowad na podstawie periodycznych wahao
amperomierza (rys. 23.1la). Jeśli źródło zasilania nie jest wystarczająco sztywne, to obserwuje się
również niewielkie wahania napięcia na zaciskach twornika, spowodowane przez zmieniające się, pod
wpływem wahao prądu, spadki napięd w linii zasilającej i autotransformatorze. Ponieważ X
d
> X
q
,
reaktancji X
d
odpowiada chwila, w której amperomierz wskazuje wartośd minimalną, a woltomierz
maksymalną (I
min
, U
max
), natomiast reaktancji X
q
chwila, dla której I = I
max
oraz U = U
min
.
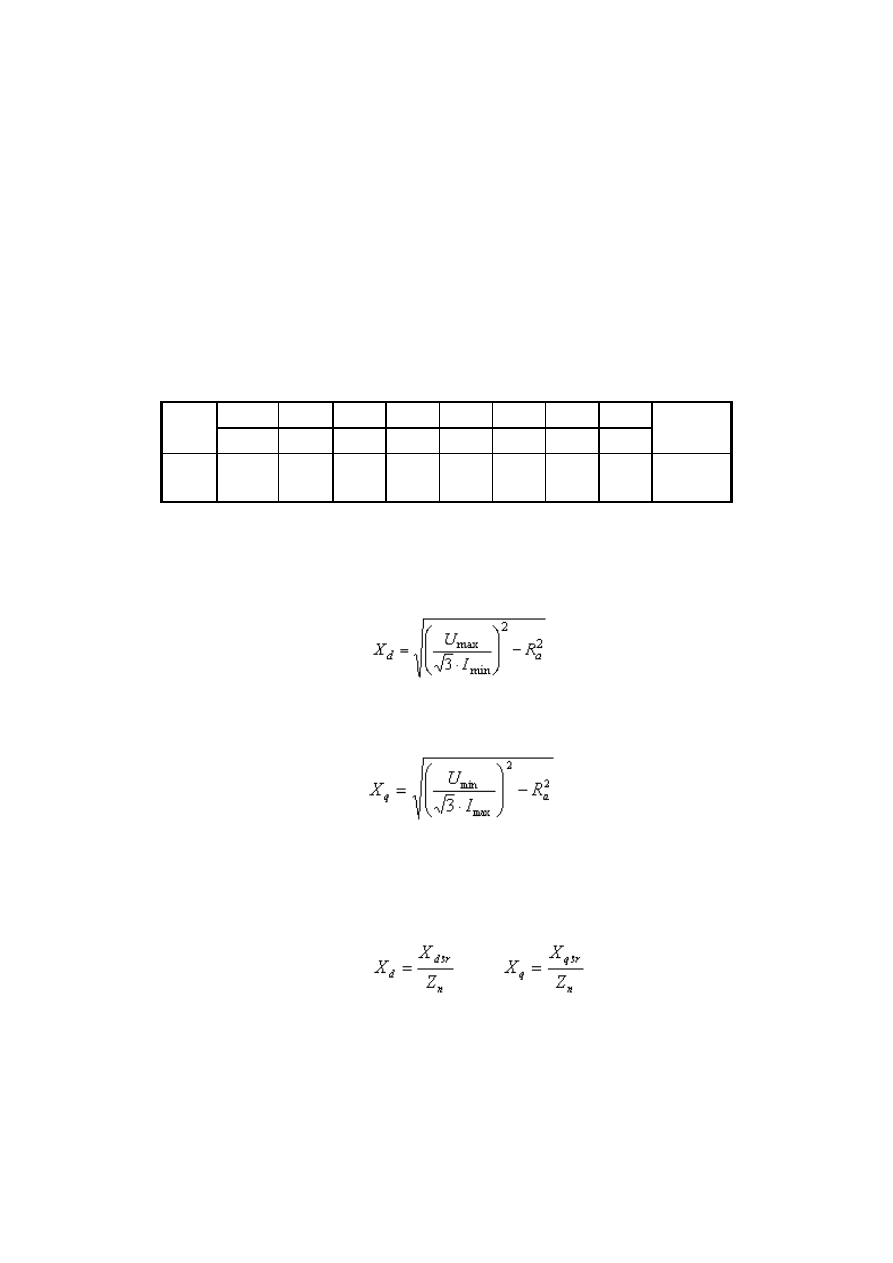
111
Woltomierz magnetoelektryczny, z zerem pośrodku skali, włączony na zaciski uzwojenia wzbudzenia,
wychyla się w obydwu kierunkach z częstotliwością poślizgu. Ułatwia to uchwycenie chwil, w których
należy odczytywad wskazania przyrządów (rys. 23.11c). Jeśli wskazówka przyrządu nie waha się,
mimo że prędkośd maszyny jest zbliżona do synchronicznej, to oznacza, że jest zła kolejnośd faz.
Należy tego unikad, gdyż duże napięcie przemienne, jakie się wtedy indukuje w uzwojeniu
wzbudzenia, zwłaszcza przy słabej klatce tłumiącej, może byd niebezpieczne dla wykonujących
pomiar oraz może uszkodzid woltomierz. I izolację uzwojenia.
W czasie pomiarów dokonad kilku równoczesnych odczytów woltomierza i amperomierza dla
ustawienia w osi d i w osi q. Wyniki zestawid w tabeli 23.2.
Tabela 23.2
Lp.
I
min
U
max
I
max
U
min
X
d
X
q
X
d
X
q
Uwagi
A
V
A
V
–
–
W maszynach małej mocy (takimi z jakimi mamy do czynienia w laboratorium) wartości rezystancji
uzwojeo są porównywalne z wartościami reaktancji, toteż przy obliczeniach reaktancji należy to
uwzględnid. Reaktancję synchroniczną podłużną oblicza się jako
(23.15)
natomiast reaktancję poprzeczną ze wzoru
(23.16)
W maszynach średnich i dużych mocy rezystancja twornika R
a
<< X
d
, X
q
, zatem w takich przypadkach
wzory (23.15) i (23.16) można uprościd przyjmując R
a
=0. Wartości reaktancji w jednostkach
względnych należy określid dla średnich wartości X
d
i X
q
uzyskanych z pomiarów
,
(23.17)
3.2.3
Pomiar reaktancji podprzejściowej podłużnej i poprzecznej
Reaktancje podprzejściowe X
”
d
i X
”
q
wyznacza się w układzie pomiarowym przedstawionym na rys.
23.12. Wirnik maszyny jest nieruchomy, a uzwojenie wzbudzenia zwarte przez amperomierz. Do
dwóch faz twornika doprowadza się regulowane napięcie jednofazowe. Prąd twornika wytworzy pole
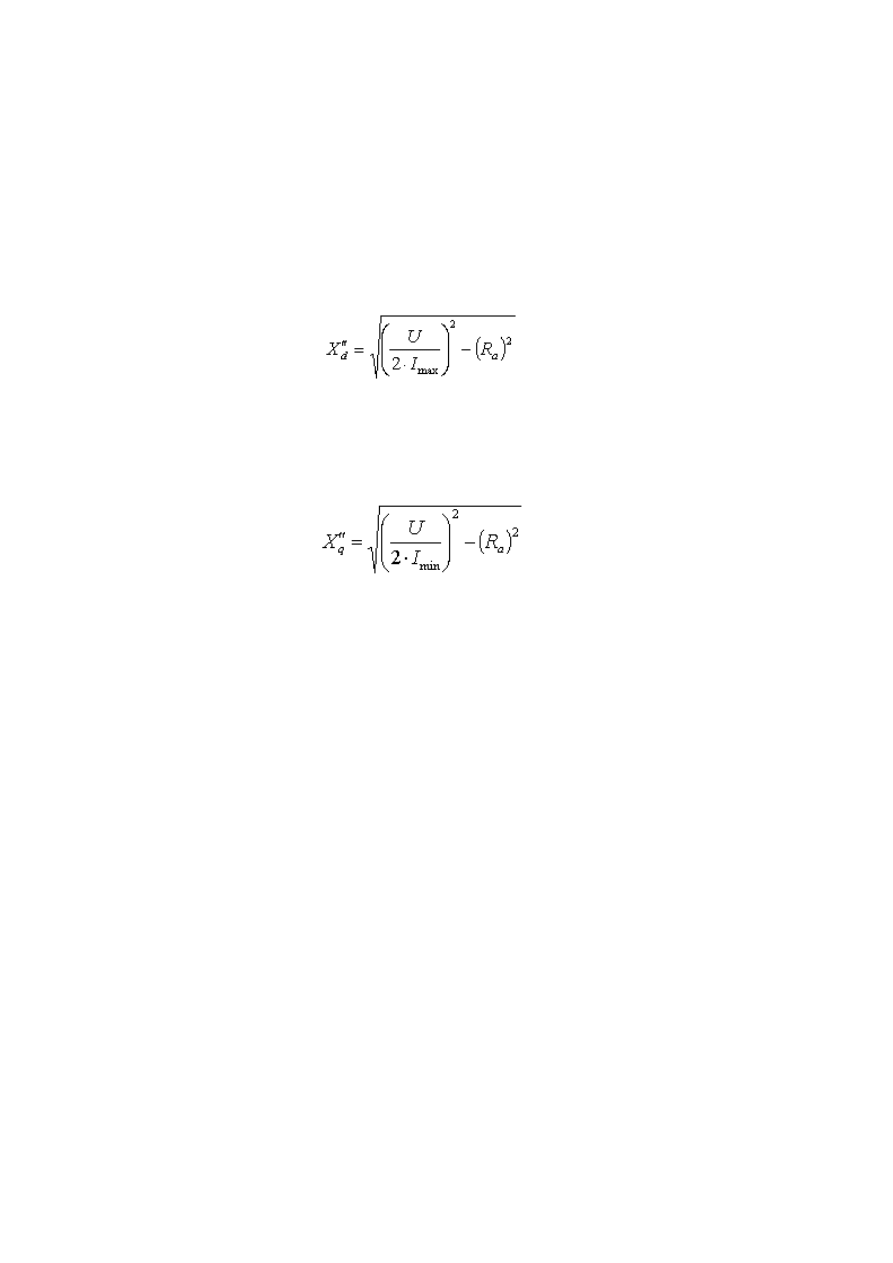
112
pulsujące z częstotliwością zasilania. Ponieważ klatka tłumiąca oraz zwarte uzwojenie wzbudzenia
przy tak dużej częstotliwości zmian strumienia ekranują wirnik, więc strumieo ten zamyka się na
drodze zbliżonej do drogi strumienia
”
(p. 3.1.2, 3.1.3).
Obracając powoli wirnik można ustalid położenie, w którym oś d pokryje się z osią wypadkowej SMM
stojana. Prąd w zwartym uzwojeniu wzbudzenia będzie w tym położeniu miał wartośd maksymalną.
Ponieważ X
”
d
< X
”
q
, prąd w uzwojeniu twornika będzie również maksymalny. Reaktancję
podprzejściową podłużną można zatem obliczyd ze wzoru
(23.18)
Obracając dalej wirnikiem, znajdujemy położenie, w którym oś q pokryje się z osią SMM twornika.
Prąd twornika i prąd wzbudzenia osiągają wartości minimalne. Reaktancja podprzejściowa w osi q
jest więc wyrażona zależnością
(23.18)
Zależnośd reaktancji podprzejściowej i prądu w zwartym uzwojeniu wzbudzenia w funkcji kąta jaki
tworzy oś SMM twornika z osią podłużną maszyny przedstawiono na rys. 23.13.
Należy wykonad 3 równoczesne pomiary prądu twornika i napięcia zasilającego dla obydwu
ekstremalnych położeo wirnika. Poszczególne punkty pomiarowe dobrad dla różnych wartości
napięcia zasilającego. Ze wzglądu na brak normalnego chłodzenia (maszyna nieruchoma) maksymalny
prąd twornika nie powinien przekraczad 0,25·I
n
.
Wyniki pomiarów dla poszczególnych reaktancji zastawid w tabelach 23.3 i 23.4.
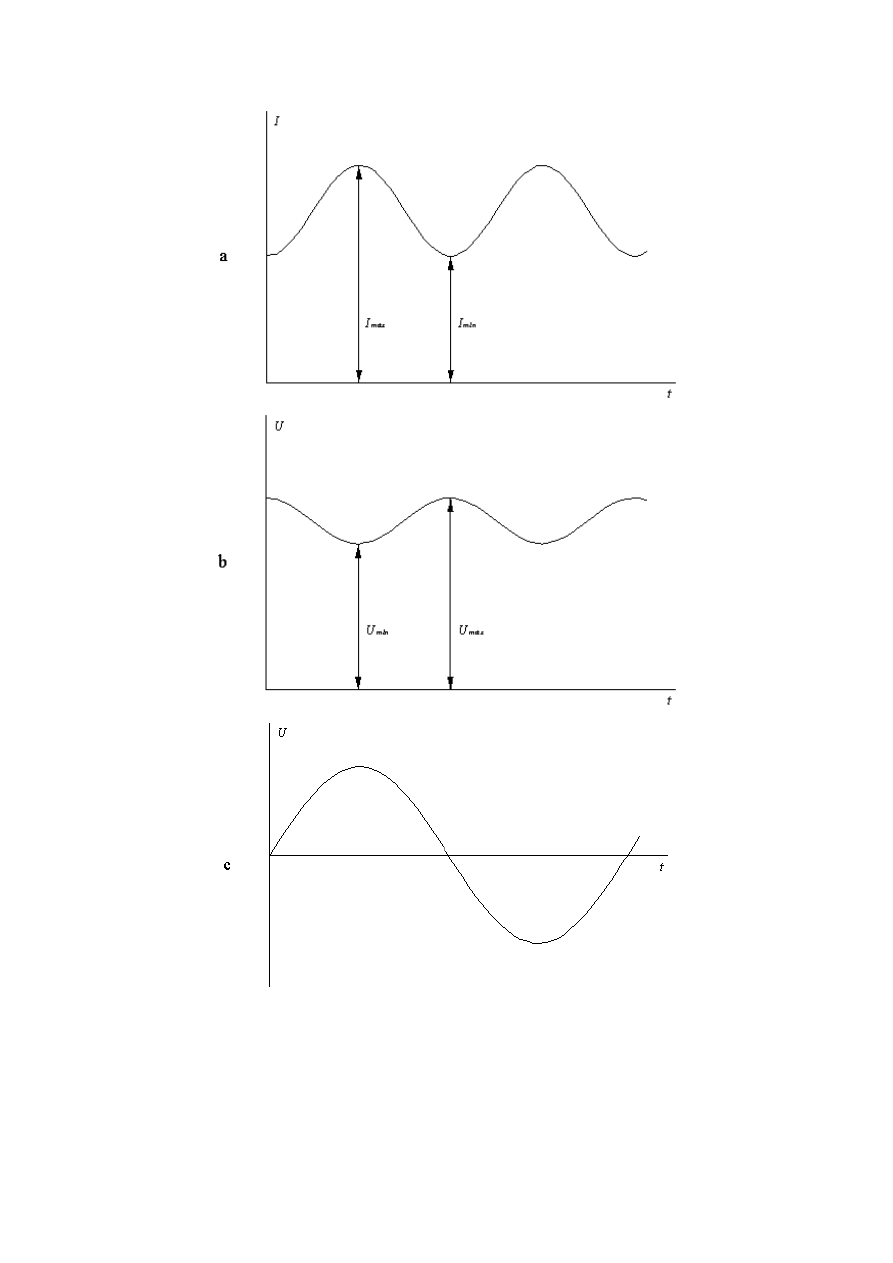
113
Rys. 23.11. Zmiany napięcia i prądu w uzwojeniu twornika (a,b) i uzwojeniu wzbudzenia (c) przy prędkości
poślizgowej
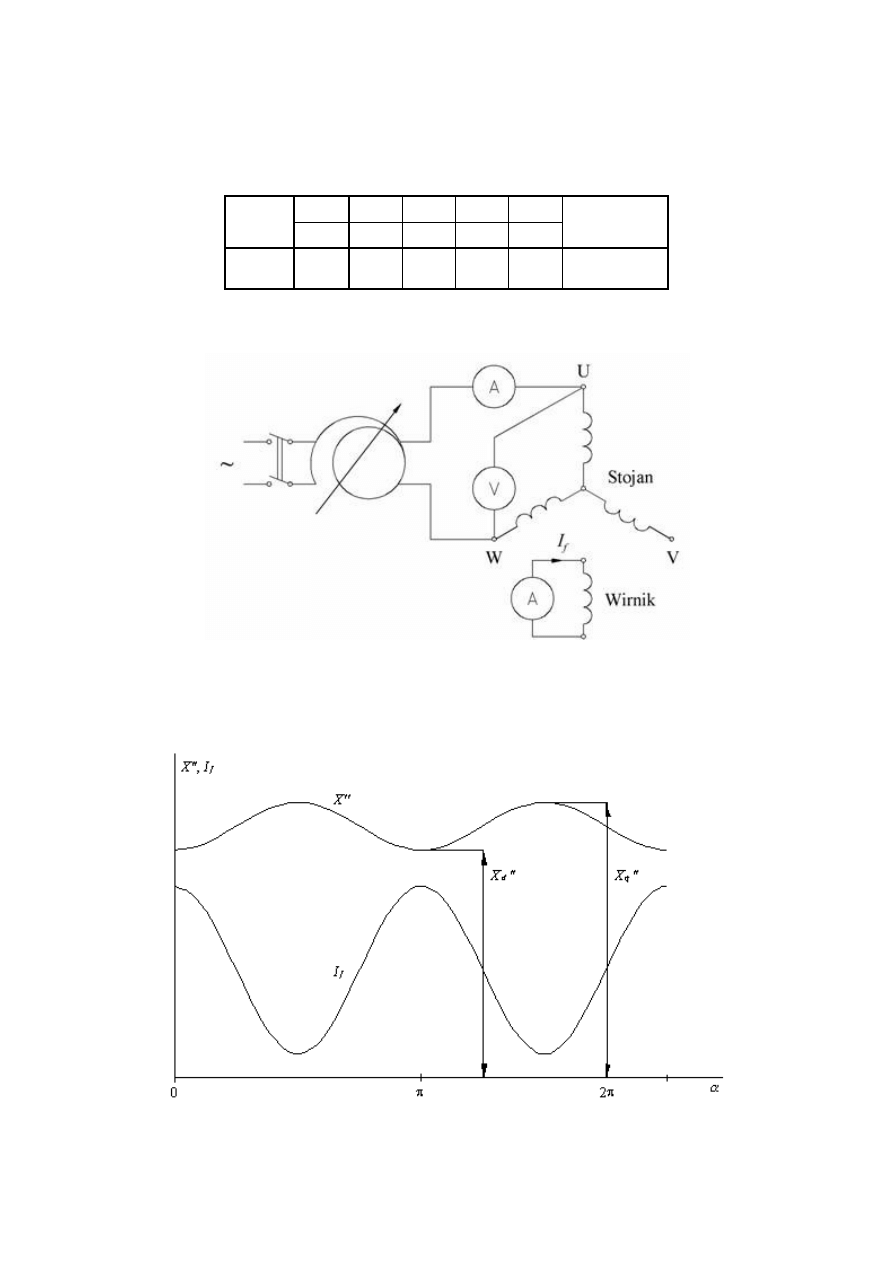
114
Tabela 23.3
Lp.
U
I
max
X
”
d
X
”
dśr
x
”
d
Uwagi
V
A
–
Rys. 23.12. Układ do pomiaru reaktancji podprzejściowych
Rys. 23.13. Zależnośd reaktancji podprzejściowej od kąta między osią SMM twornika a osią podłużną maszyny
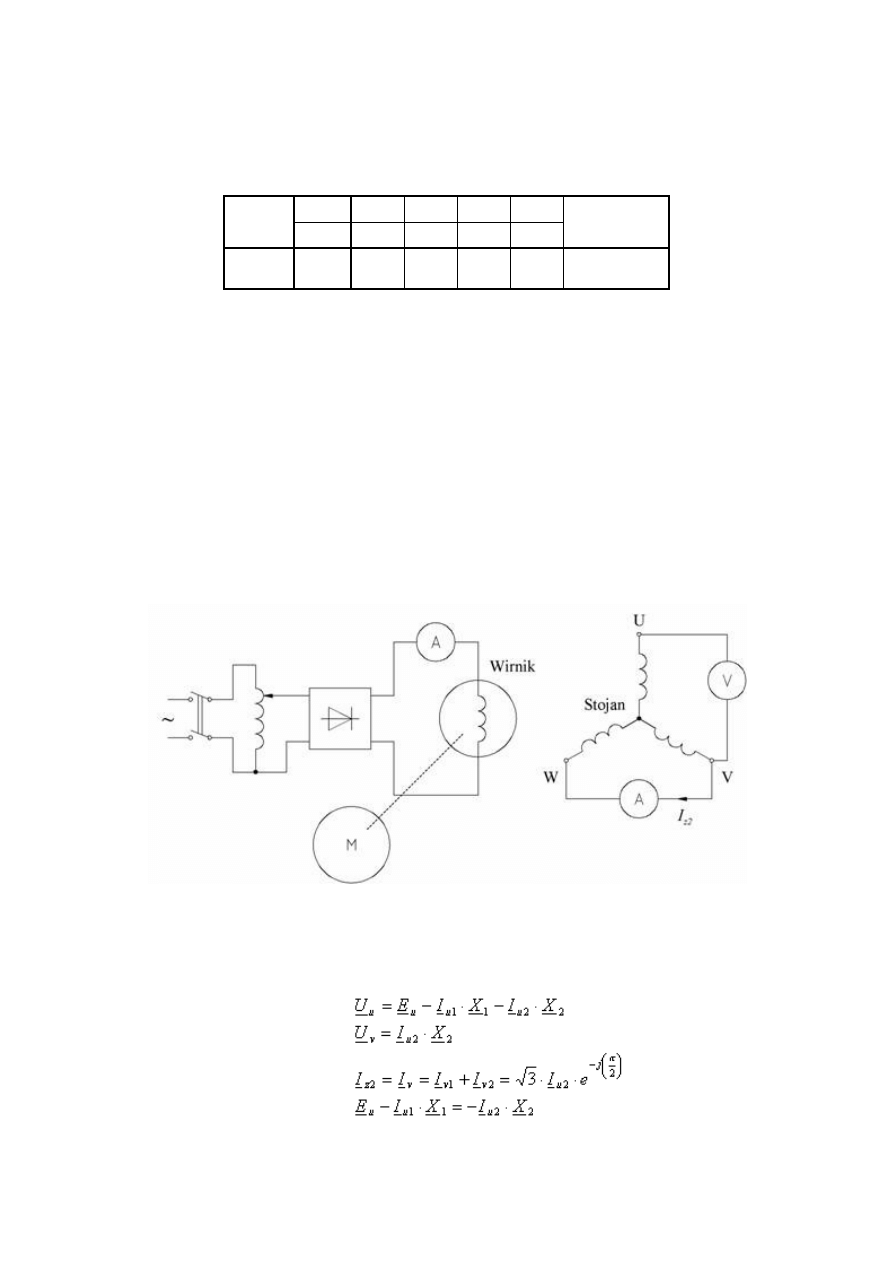
115
Tabela 23.4
Lp.
U
I
min
X
”
q
X
”
qśr
x
”
q
Uwagi
V
A
–
3.2.4
Pomiar reaktancji dla składowej przeciwnej
Reaktancję dla składowej przeciwnej X
2
wyznacza się w układzie pomiarowym przedstawionym na
rysunku 23.14. Prądnica synchroniczna jest napędzana ze znamionową prędkością obrotową. Dwie
fazy twornika (V i W) są ze sobą zwarte poprzez amperomierz. Po załączeniu wyłącznika zasilającego
obwód wzbudzenia prądnica zostaje wzbudzona tak, aby prąd zwarcia nie przekroczył 0,5·I
n
.
(Składowa przeciwna prądu przy zwarciu dwufazowym wywołuje duże straty w wirniku i może byd
przyczyną nadmiernego wzrostu temperatury). Na rysunku 23.15 przedstawiono wykres wektorowy
prądów i napiąd kolejności zgodnej i przeciwnej. Odpowiada on rozpatrywanemu przypadkowi przy
założeniu, że rezystancja twornika R
a
= 0. Z wykresu wynikają następujące zależności
Rys. 23.14. Układ do pomiaru reaktancji dla składowej przeciwnej
(23.20)
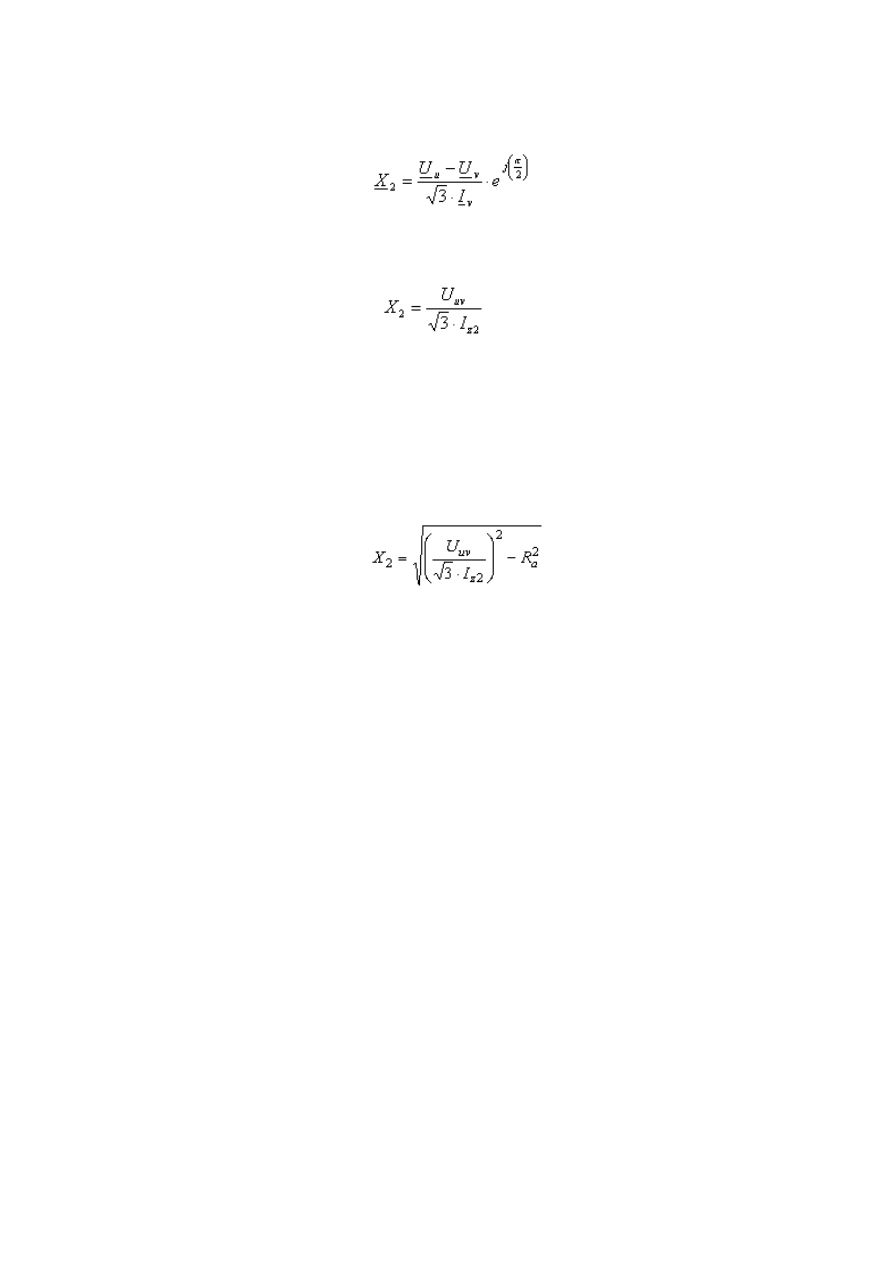
116
po przekształceniu których otrzymuje się wyrażenie na reaktancję dla składowej przeciwnej
(23.21)
Wzór (23.21) można uprościd do postaci
(23.22)
Zatem mierząc prąd zwarcia dwufazowego oraz napięcie między fazą wolną i jedną z faz zwartych,
można określid wartośd reaktancji X
2
. Należy wykonad 3 pomiary dla różnych wartości prądu zwarcia,
a wyniki zestawid w tabeli 23.5.
Ze względu na stosunkowo dużą wartośd rezystancji twornika w porównaniu z wyznaczaną reaktancją
X
2
należy ją uwzględnid posługując się w obliczeniach wzorem:
(23.23)
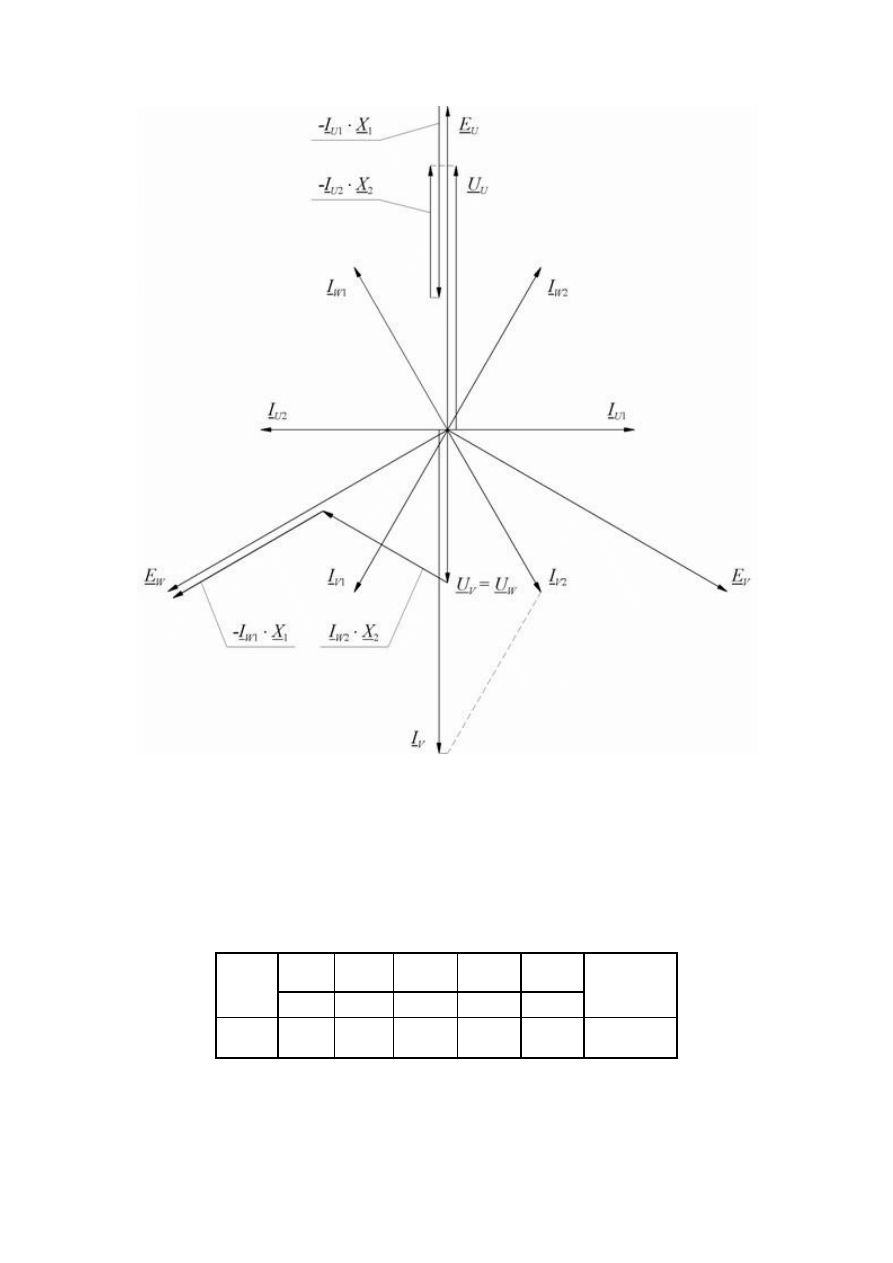
117
Rys. 23.15. Wykres wektorowy prądów i napięd przy zwarciu dwufazowym
Tabela 23.5
Lp.
U
I
2
X
2
X
2śr
x
2
Uwagi
V
A
–
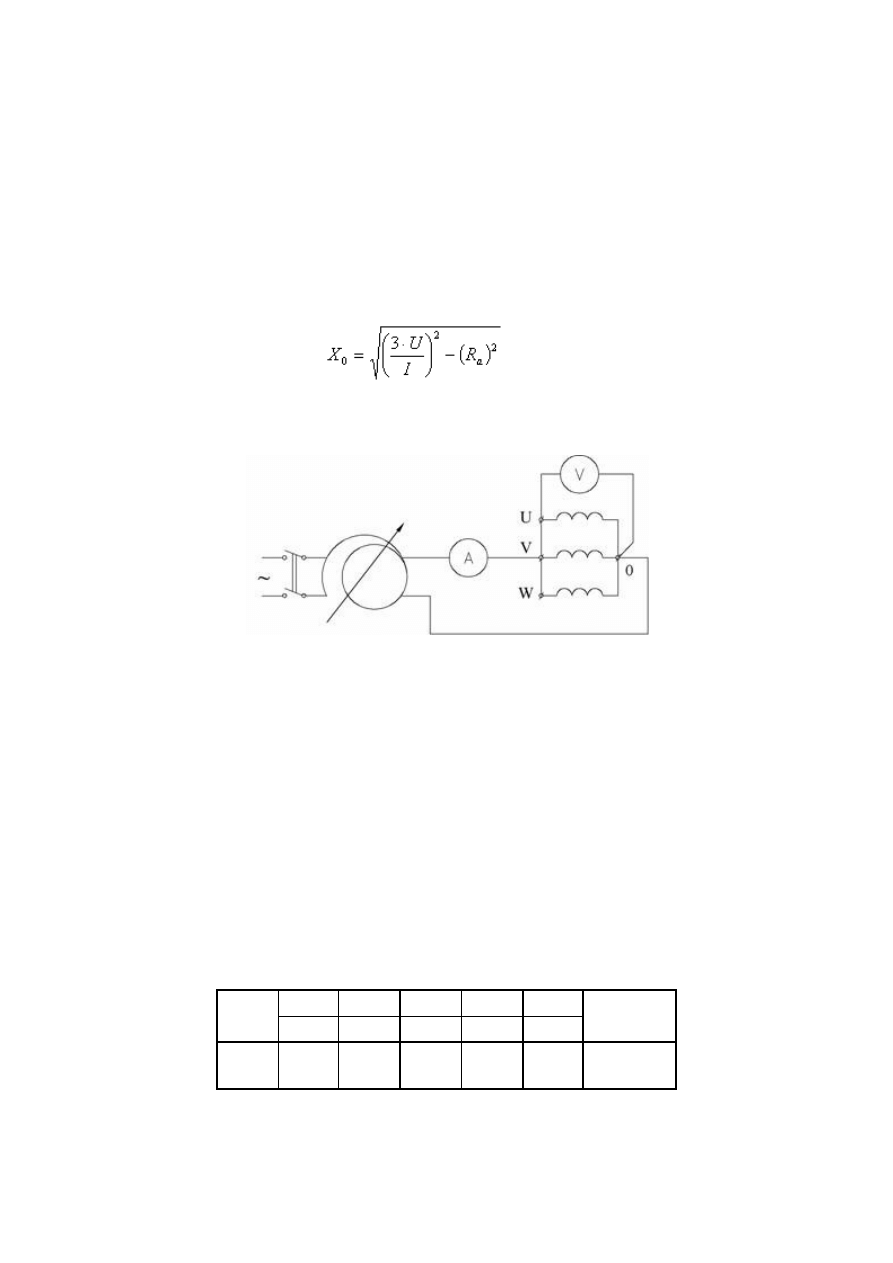
118
3.2.5
Pomiar reaktancji dla składowej zerowej
Reaktancję dla składowej zerowej X
0
wyznacza się w układzie jak na rys. 23.16. Poszczególne fazy
uzwojenia twornika nieruchomej maszyny łączy się równolegle i zasila napięciem jednofazowym.
Prądy we wszystkich uzwojeniach są równe i mają jednakową fazę, tak jak składowe zerowe prądu
trójfazowego. Ponieważ amperomierz mierzy wartośd I = 3·I
0
, wyrażenie na reaktancję dla składowej
zerowej przybierze postad
(23.24)
Rys. 23.16. Układ do pomiaru reaktancji dla składowej zerowej
Pomiary należy wykonad dla kilku różnych położeo wirnika. Prąd płynący przez amperomierz nie
powinien przekraczad wartości I
n
. Wyniki zestawid w tabeli 23.6.
Tabela 23.6
Lp.
U
I
X
0
X
0śr
x
0
Uwagi
V
A
–
4
Sprawozdanie z ćwiczenia
Sprawozdanie z dwiczenia powinno zawierad:

119
protokół z pomiarów,
zestawienie pomierzonych i obliczonych parametrów,
wnioski.
5 Pytania
Zdefiniowad pojęcia reaktancji:
synchronicznej,
podprzejściowej,
dla składowej przeciwnej,
dla składowej zerowej.
Uzasadnid różnice między wartościami reaktancji w osi podłużnej i poprzecznej.
Wyjaśnid wpływ nasycenia obwodu magnetycznego maszyny na wartośd reaktancji
synchronicznej.
Opisad metody pomiaru poszczególnych reaktancji.
Jakiemu praktycznemu celowi służy podział reaktancji synchronicznej na reaktancję X
ad
i X
1
?

120
ĆWICZENIE 24
BADANIE SILNIKA SYNCHRONICZNEGO
1
Program ćwiczenia
Rozruch silnika metodą asynchroniczną.
Wyznaczenie charakterystyk elektromechanicznych silnika (I, M, P
1
= f(P
2
) przy U, f, cos
= const).
Wyznaczenie charakterystyk kompensatorowych silnika (I
Q
, I
p
, I
f
, cos
= f(P
2
) przy U, I = const).
Wyznaczenie znamionowej przeciążalności silnika.
2
Cel ćwiczenia
Celem dwiczenia jest poznanie budowy i właściwości eksploatacyjnych silnika synchronicznego. Silniki
tego typu mają cenne zalety, do których należą: stała, niezależna od obciążenia, prędkośd obrotowa,
możliwośd kompensacji mocy biernej i duża sprawnośd. Do wad tych maszyn można zaliczyd
kłopotliwy rozruch oraz brak łatwej regulacji prędkości obrotowej. Silniki synchroniczne są stosowane
w napędach średnich i dużych mocy, które nie wymagają regulacji prędkości obrotowej i zbyt
częstych rozruchów. Należą do nich napędy sprężarek, wentylatorów, pomp itp.
Podczas pomiarów przeprowadzanych w trakcie dwiczenia szczególną uwagę należy zwracad na te
aspekty pracy silnika, które różnią go od innych znanych typów silników. Umożliwi to analizę
porównawczą różnych typów silników pod kątem ich przydatności do określonego rodzaju napędu.
3
Omówienie programu ćwiczenia
3.1
Rozruch silnika synchronicznego
Moment obrotowy w silniku synchronicznym jest wynikiem oddziaływania wirującego strumienia
twornika ze strumieniem wzbudzenia. W czasie normalnej pracy strumienie te wirując z jednakową
prędkością w przestrzeni, pozostają względem siebie nieruchome. Jeśli jednak zasilid twornik silnika
przy wirniku nieruchomym, to strumieo twornika będzie wirował względem wirnika z prędkością
synchroniczną. Powstający moment obrotowy ma wtedy charakter pulsujący – zmienia wartośd i
kierunek z częstotliwością napięcia twornika. Na skutek dużej bezwładności wirnika pozostaje on
nieruchomy, gdyż średnia wartośd działającego na niego momentu jest równa zeru.
Aby silnik synchroniczny mógł wytwarzad jednokierunkowy moment, należy go doprowadzid do
prędkości synchronicznej. Proces ten nazywany jest rozruchem silnika.
Do znanych sposobów rozruchu silników synchronicznych należą:
a)
rozruch za pomocą silnika pomocniczego,
b)
rozruch częstotliwościowy,
c)
rozruch asynchroniczny.
Rozruch za pomocą silnika pomocniczego nie różni się od opisanej w dwiczeniu 22 synchronizacji
prądnicy synchronicznej z siecią. Silnik jest napędzany za pomocą niewielkiego silnika dodatkowego
do prędkości synchronicznej. Następnie, po wzbudzeniu i spełnieniu warunków synchronizacji, jest

121
załączany do sieci. Sposób ten jest rzadko stosowany. Nie pozwala on na rozruch silnika pod
obciążeniem.
Rozruch częstotliwościowy wymaga źródła o regulowanej częstotliwości, w granicach od zera do
częstotliwości znamionowej, z jednoczesnym zachowaniem warunku U / f = const. Przy powolnym
zwiększaniu częstotliwości napięcia twornika, wzbudzony wirnik, którego strumieo jest praktycznie
stale w synchronizmie ze strumieniem stojana, wiruje z prędkością zależną od aktualnej
częstotliwości. Rozruch częstotliwościowy jest uzasadniony jedynie tam, gdzie jest wymagana
regulacja prędkości obrotowej silnika w dużym zakresie. Stosowane w takich przypadkach statyczne
przemienniki częstotliwości służą jako źródło zasilania nie tylko w czasie rozruchu, ale i podczas pracy
silnika. Proces rozruchu jest w takim przypadku procesem regulacji prędkości obrotowej od zera do
wymaganej prędkości. Dużą zaletą rozruchu częstotliwościowego jest możliwośd rozruchu silnika przy
pełnym obciążeniu, jego wadą – dośd duży koszt przemienników.
Najczęściej stosowanym sposobem uruchamiania silników synchronicznych jest rozruch
asynchroniczny. Wymaga on jednak odpowiedniego przystosowania konstrukcji maszyny.
Magneśnicę silnika wyposaża się w klatkę rozruchową. Jej rolę może również odgrywad klatka
tłumiąca lub lite bloki nabiegunników. W zależności od parametrów klatki rozruchowej silnik może
startowad z większym lub mniejszym obciążeniem.
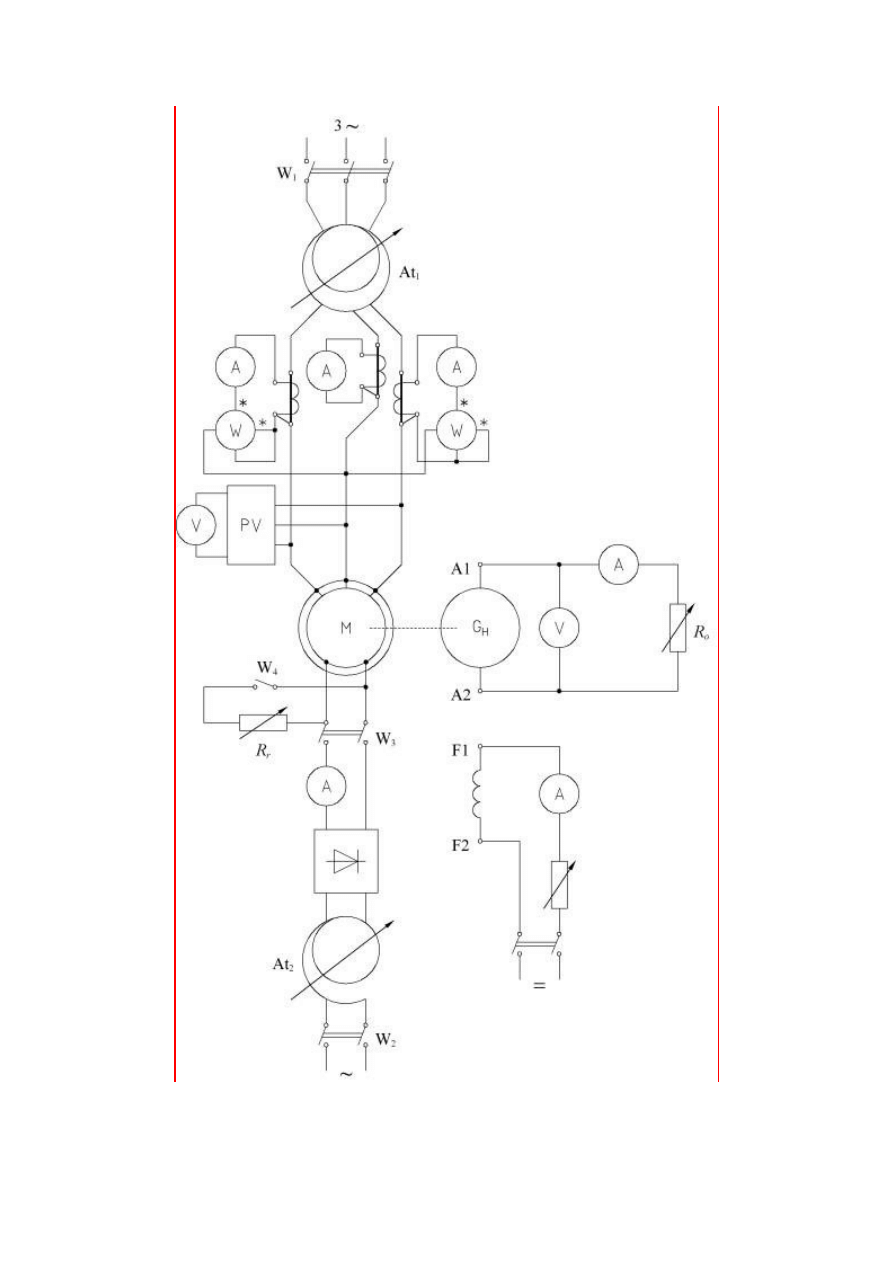
122
Rys. 24.1. Schemat układu pomiarowego
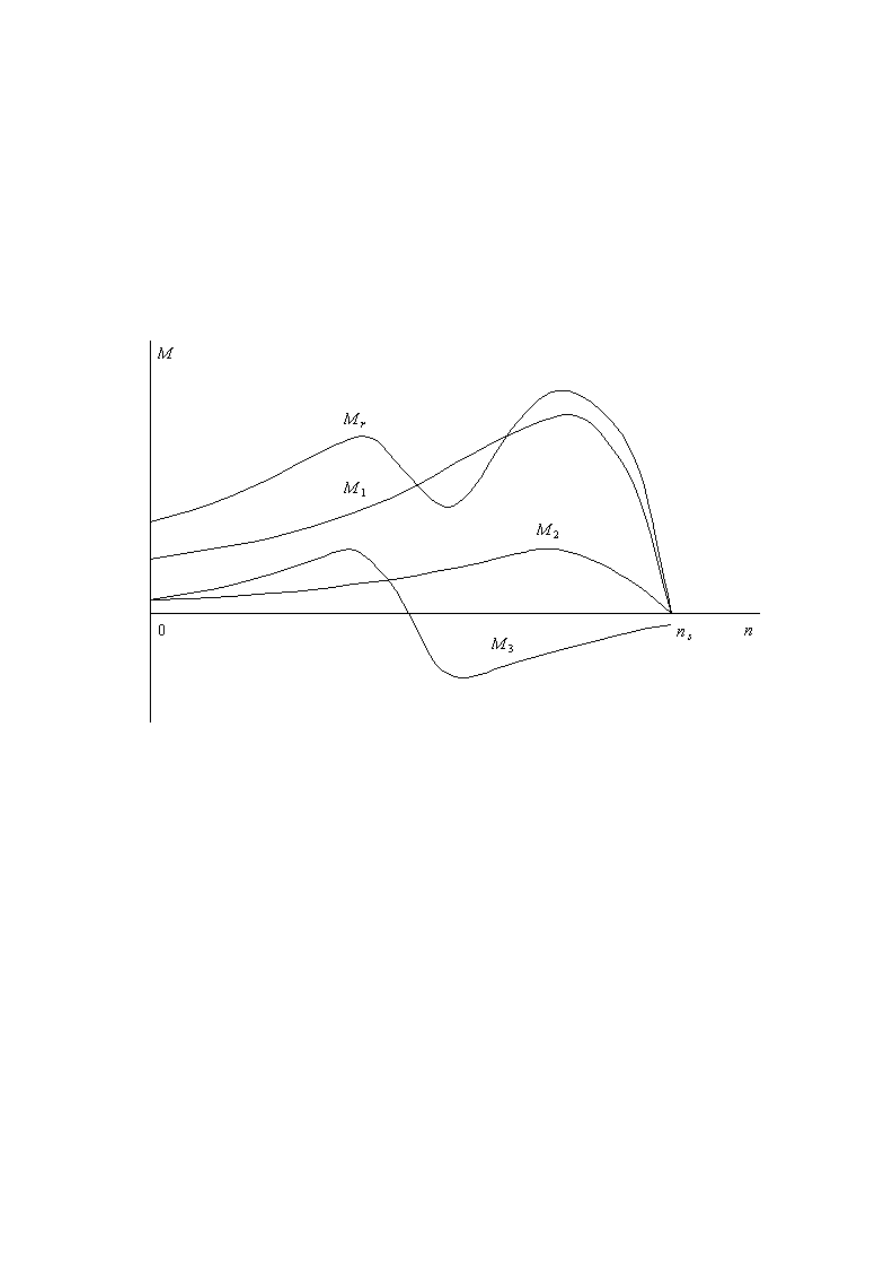
123
Rozruch jest przeprowadzany, podobnie jak dla silników indukcyjnych, w układzie pokazanym na rys.
24.1. Początkowo obwód uzwojenia wzbudzenia jest odłączony od zasilania i zamknięty przez
wyłącznik W4 i opornik R
r
. Po załączeniu trójfazowego napięcia na twornik silnika zostaje wytworzony
wirujący strumieo magnetyczny, który indukuje w zamkniętych obwodach wirnika prądy, co
powoduje powstanie asynchronicznego momentu obrotowego i silnik zaczyna wirowad. Po uzyskaniu
ustalonej prędkości obrotowej, która jest dośd bliska prędkości synchronicznej, zamyka się wyłączniki
W2 i W3 włączając prąd wzbudzenia, a następnie rozwiera wyłącznik W4 odłączając rezystor R
r
.
Wobec małej prędkości względnej strumieni wirnika i stojana wirnik zostaje „wciągnięty” w
synchronizm.
Rys. 24.2. Składowe momentu rozruchowego silnika synchronicznego
Podczas rozruchu oprócz momentu asynchronicznego od prądów indukowanych w klatce
rozruchowej (krzywa M
1
, rys. 24.2) działa również moment pochodzący od prądów indukowanych w
zamkniętym obwodzie uzwojenia wzbudzenia. Uzwojenie to jest jednofazowe, zatem strumieo
wywołany przez prąd płynący w nim jest strumieniem pulsującym. Strumieo taki może byd rozłożony
na dwie składowe wirujące w przeciwnych kierunkach. Moment obrotowy od składowej współbieżnej
ze strumieniem stojana przedstawia krzywa M
2
, a od składowej przeciwbieżnej krzywa M
3
. Krzywa M
r
przedstawia przebieg wypadkowego momentu rozruchowego.
Wartości momentów M
2
, i M
3
zależą od rezystancji R
r
. Jeśli rezystancja ta jest zbyt mała, siodło na
krzywej M
r
, spowodowane momentem M
3
, może byd tak głębokie, że silnik ustali swą prędkośd
obrotową w połowie prędkości synchronicznej, co uniemożliwi jego wejście w synchronizm po
włączeniu wzbudzenia. Wartośd rezystancji R
r
powinna byd 8–10 razy większa od rezystancji
uzwojenia wzbudzenia. Zbyt duża wartośd R
r
powoduje indukowanie się w uzwojeniu dużego
napięcia, które może byd niebezpieczne dla jego izolacji oraz może stanowid zagrożenie dla obsługi.

124
Wielkością charakteryzującą rozruch silnika pod obciążeniem jest tzw. moment wpadu. Oznacza on
największy moment hamujący, przy którym silnik może wpaśd w synchronizm po włączeniu
wzbudzenia przy ustalonej prędkości asynchronicznej. Moment silnika przy 5% poślizgu, czyli
prędkości n = 0,95·n
s
jest nazywany znamionowym momentem wpadu Moment ten wynosi (0,7–
0,9)·M
n
dla silników o biegunach jawnych i klatką rozruchową oraz około 0,3·M
n
dla silników z
wirnikiem cylindrycznym bez klatki tłumiącej.
Początkowa wartośd prądu rozruchowego podczas rozruchu asynchronicznego jest, podobnie jak w
przypadku silników indukcyjnych, dośd duża i wynosi (5–7)·I
n
. Zmniejszenie tego prądu można uzyskad
przez obniżenie wartości napięcia zasilającego w początkowym okresie rozruchu za pomocą
autotransformatorów lub dławików łączonych w szereg z uzwojeniem twornika. Należy jednak
pamiętad, że taką metodę można stosowad jedynie przy rozruchu lekkim, gdyż moment obrotowy
maleje proporcjonalnie do kwadratu zmian napięcia.
Rozruchu silnika dokonuje się bez obciążenia przy napięciu obniżonym za pomocą
autotransformatora. Przed rozruchem należy ustalid położenie pokrętła autotransformatora AT2
odpowiadające znamionowej wartości prądu wzbudzenia. W tym celu po zamknięciu wyłączników
W2 i W3 (rys. 24.1) należy, regulując napięcie wyjściowe autotransformatora AT2, nastawid
znamionową wartośd prądu wzbudzenia i wyłączyd wyłącznik W3. Następnie wyłącznikiem W1
zamknąd obwód wzbudzenia przez rezystor R
r.
Po zwarciu amperomierzy i cewek prądowych
watomierzy i nastawieniu autotransformatora AT1 w pozycji U
min
włącza się zasilanie twornika
wyłącznikiem W4. Napięcie twornika podnosi się powoli do wartości U
n
w miarę jak silnik nabiera
prędkości obrotowej. Po ustaleniu się prędkości silnika na wartości bliskiej prędkości synchronicznej
zamyka się wyłącznik W3. Silnik wpada w synchronizm. Następnie należy szybko otworzyd wyłącznik
W4, wyłączając rezystor R
r
. Często, w przypadku silników synchronicznych o biegunach jawnych,
synchronizm zostaje już osiągnięty przed włączeniem prądu wzbudzenia co jest spowodowane
występowaniem w takich maszynach momentu reluktancyjnego.
3.2
Wyznaczanie charakterystyk elektromechanicznych
Charakterystyki elektromechaniczne silnika podają jego właściwości eksploatacyjne. Są to zależności
prądu twornika I, mocy pobieranej z sieci P
1
, momentu obrotowego M i sprawności
od mocy
oddawanej na wale silnika przy znamionowych wartościach napięcia U, współczynnika mocy cos
oraz częstotliwości f.
Układ pomiarowy przedstawiono na rys. 24.1. Obciążenie silnika stanowi prądnica obcowzbudna
prądu stałego o znanej zależności P
1g
= f(P
2g
) przy U
a
= U
n
i n = n
s
. P
1g
oznacza moc mechaniczną
dostarczaną do prądnicy, równą mocy oddawanej przez silnik P
2
, a P
2g
moc elektryczną oddawaną
przez prądnicę na opornik R
o
.
Pomiary charakterystyk należy przeprowadzid przy współczynniku mocy równym 1,0, obciążając silnik
w zakresie (0–1,2)·P
n
. Obciążenie silnika reguluje się przez zmianę rezystancji R
o
. Przez cały czas
pomiarów należy utrzymywad stałe napięcie na zaciskach twornika prądnicy hamulcowej przez
regulowanie jej prądu wzbudzenia. Ponieważ przy zmianie obciążenia silnika niewielkiej zmianie
ulega również rozpływ mocy biernej, należy dla każdego punktu pomiarowego skorygowad
125
współczynnik mocy do wartości 1,0 przez regulację prądem wzbudzenia silnika. Prąd twornika przy
cos
= 1,0 ma wartośd minimalną, a obydwa watomierze w zastosowanym układzie Arona wskazują
taką samą wartośd (p. krzywe V,
dw. 22).
W podanym zakresie mocy należy wykonad około 8 pomiarów, odczytując prąd pobierany przez silnik
I, moc czynną P
1
i prąd oddawany przez prądnicę hamulcową I
g
. Napięcie zasilające silnik przez cały
czas pomiarów powinno byd równe znamionowemu. Wyniki pomiarów należy zestawid w tabeli 24.1.
Tabela 24.1
Lp.
I
u
I
v
I
śr
P
I
P
II
P
1
P
2
M
I
g
P
2g
Uwagi
A
A
A
W
W
W
W
N·m
–
A
W
1
·
·
·
8
U = U
n
cos
= 1,0
U
g
= U
n = n
s
Moc oddawaną przez prądnicę hamulcową oblicza się ze wzoru
(24.1)
Moc oddawana przez silnik P
2
równa jest mocy mechanicznej pobieranej przez prądnicę P
1g
i może
byd odczytana z wykresu P
1g
= f(P
2g
) dla poszczególnych wartości P
2g
.
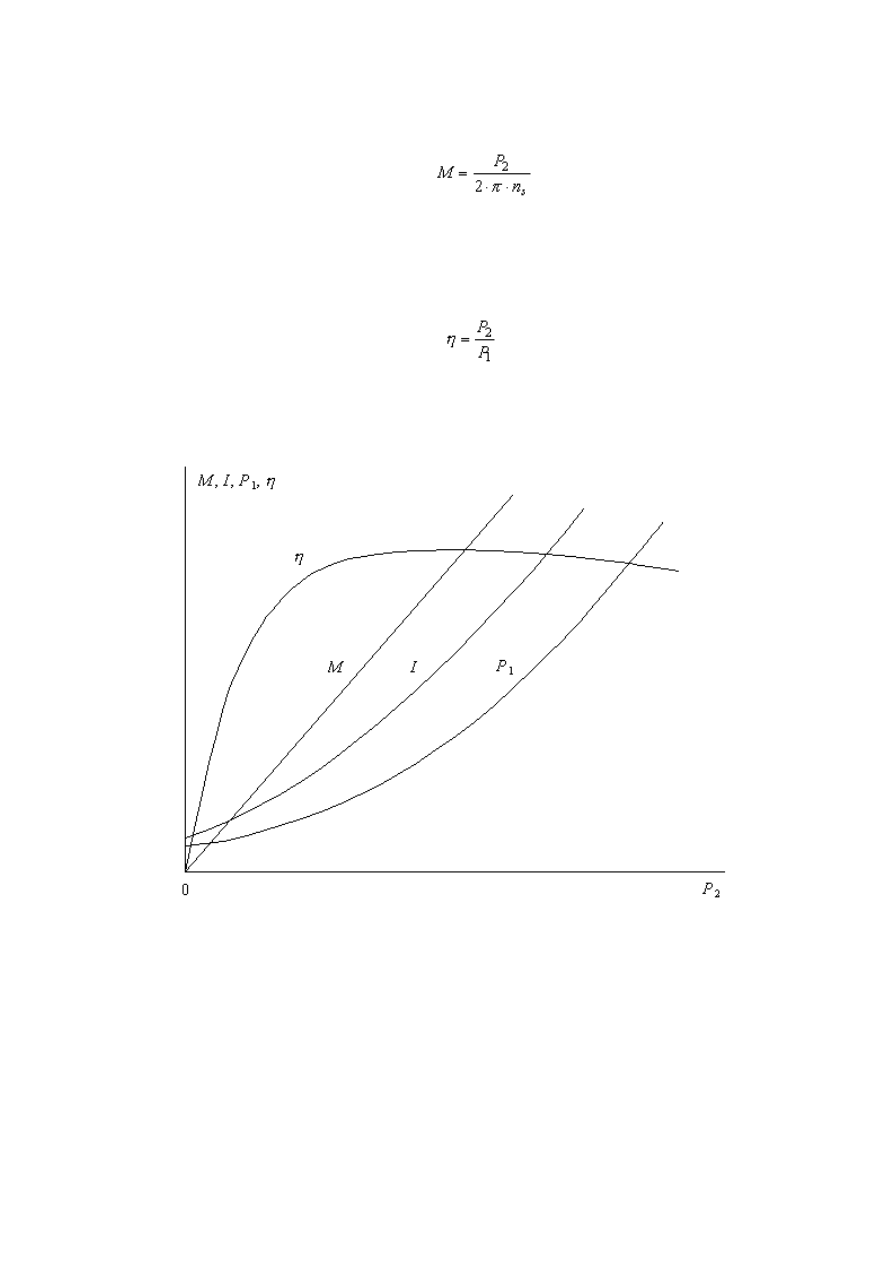
126
Moment obrotowy silnika
(24.2)
gdzie: n
s
– prędkośd synchroniczna w obr/s.
Sprawnośd silnika
(24.3)
Na podstawie otrzymanych wyników należy wykreślid charakterystyki I, P, M, cos
,
= f(P
2
). Ich
teoretyczny przebieg przedstawiono na rys. 24.3.
Rys. 24.3. Charakterystyki elektromechaniczne silnika synchronicznego
3.3
Wyznaczanie charakterystyk kompensatorowych
Silnik synchroniczny może w czasie pracy spełniad dodatkowo funkcję kompensatora, poprawiając
współczynnik mocy zespołu odbiorów pracujących przy cos
< 1. Silnik synchroniczny, identycznie jak
prądnica, przy przewzbudzeniu zaczyna pobierad z sieci prąd bierny pojemnościowy, zatem oddaje do
sieci moc bierną indukcyjną. Ze względu na nagrzewanie się uzwojenia twornika suma geometryczna
prądu czynnego i biernego nie może przekraczad maksymalnego dopuszczalnego prądu obciążenia
silnika, a więc jego prądu znamionowego.
127
Pomiar wykonuje się w układzie jak na rys. 24.1. Na wstępie należy ustalid punkt pracy przy
obciążeniu znamionowym silnika I = I
n
oraz cos
= 1. Prąd bierny jest wtedy równy zeru. Zmniejszając
obciążenie silnika na wale, obserwuje się zmniejszanie prądu twornika. Umożliwia to przewzbudzanie
silnika i obciążanie go dodatkowo prądem biernym, tak aby prąd twornika był nadal równy I
n
. W
skrajnym przypadku całkowitego odciążenia silnika na wale, prąd bierny stanowi ok. 90% prądu
znamionowego silnika. Silnik pracuje wówczas jako kompensator wirujący.
W zakresie od obciążenia znamionowego do zera należy wykonad około 6 pomiarów, odczytując
wartości mocy pobieranej i prądu wzbudzenia przy stałym napięciu zasilającym U i prądzie twornika
I
a
. Wyniki pomiarów zestawid w tabeli 24.2.
Tabela 24.2
Lp.
P
I
P
II
P
1
cos
Q
I
Q
I
f
Uwagi
W
W
W
–
VAr
A
A
U = U
n
I
a
= I
n
W tabeli 24.2:
(24.4)
(24.5)
(24.6)
Na podstawie wyników pomiarów i obliczeo należy wykreślid krzywe I
Q
, I
f
, cos
= f(P
1
). Ich
teoretyczny przebieg przedstawiono na rys. 24.4.
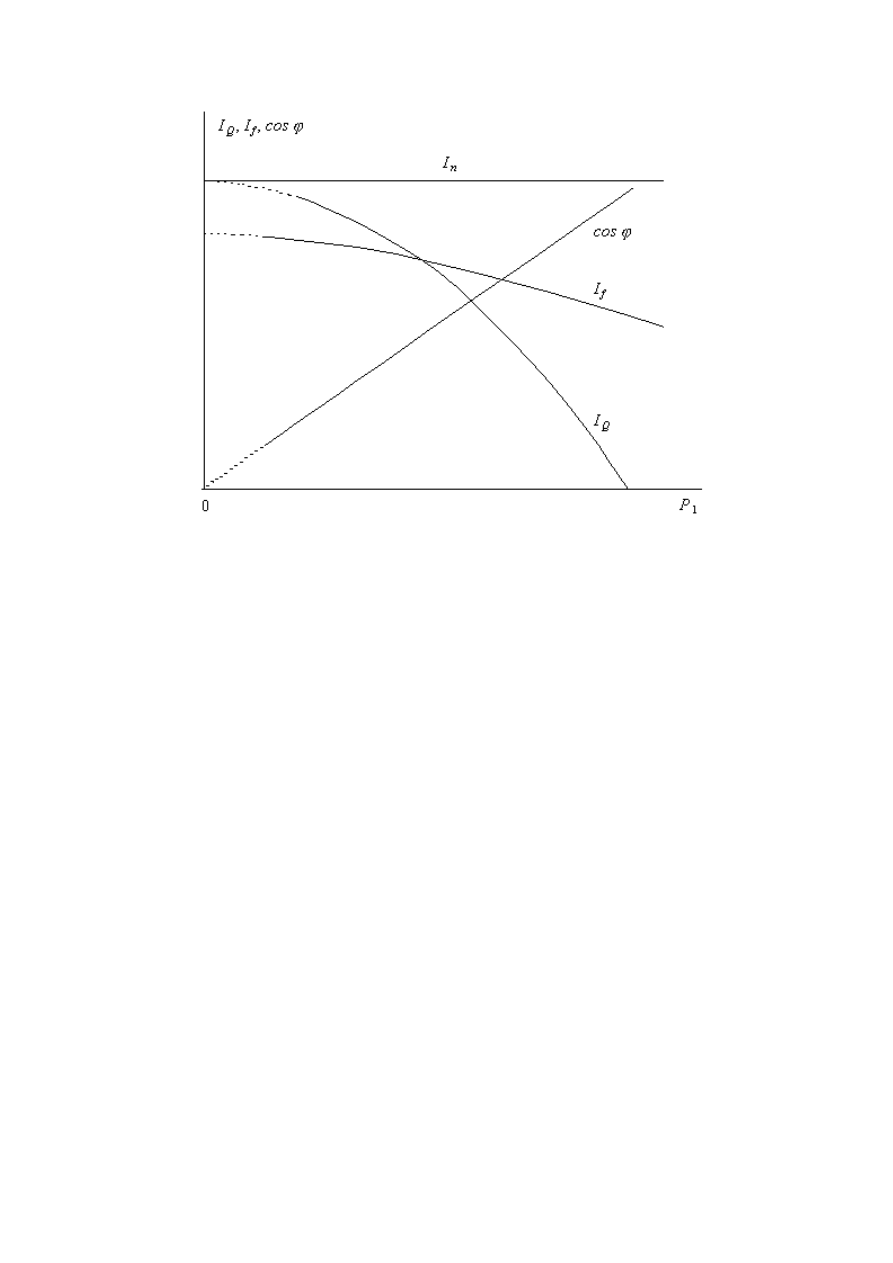
128
Rys. 24.4. Charakterystyki kompensatorowe silnika synchronicznego
3.4
Wyznaczanie znamionowej przeciążalności momentem
Stosunek wartości momentu maksymalnego, jaki silnik może rozwinąd przy znamionowym napięciu
twornika i znamionowym prądzie wzbudzenia bez utraty synchronizmu, do wartości momentu
znamionowego nazywany jest znamionową przeciążalnością momentem. Zgodnie z normą
przeciążalnośd silników synchronicznych nie powinna byd mniejsza niż 1,65.
Moment maksymalny można zmierzyd stopniowo obciążając silnik, przy zachowaniu stałych wartości
napięcia twornika i prądu wzbudzenia, aż do wypadnięcia z synchronizmu. Pomiar ten należy
przeprowadzad bardzo szybko ze wzglądu na znaczne przeciążenie maszyny i układu zasilającego.
Ponieważ w tym dwiczeniu jest stosowany pośredni sposób pomiaru momentu, szybkie i dokładne
wyznaczenie wartości momentu maksymalnego byłoby dośd trudne. Dlatego przeciążalnośd zostanie
określona na podstawie pomiaru kąta mocy
. W tym celu na wale silnika jest umieszczona tarcza z
promieniowymi kreskami. Liczba kresek jest równa liczbie par biegunów badanego silnika. Na
zewnątrz tarczy znajduje się nieruchoma podziałka kątowa (rys. 24.5).
129
Rys. 24.5. Tarcza stroboskopowa do pomiaru kąta mocy
W czasie pracy silnika tarczę oświetla się lampą stroboskopu, której częstośd błysków jest
zsynchronizowana z częstotliwością napięcia zasilającego silnik. Pozornie nieruchoma kreska
wirującej tarczy wskazuje kąt mocy
. Na wstępie, na biegu jałowym, przy cos
=1, należy, obracając
tarczą z podziałką kątową ustawid kreskę na zero. Po obciążeniu silnika mocą znamionową odczytuje
się odpowiadającą mu wartośd
n
. Następnie, po uprzednim zwarciu amperomierzy w obwodzie
twornika oraz cewek prądowych watomierzy, należy obciążad silnik aż do utraty synchronizmu.
Należy odczytad tę wartośd kąta przy której nastąpiło wypadnięcie z synchronizmu -
max
. Pomiar
kąta
max
należy przeprowadzid możliwie szybko i przy pierwszych objawach utraty synchronizmu
wyłączyd napięcie zasilające.
Przeciążalnośd silnika oblicza się z przybliżonego wzoru
(24.7)
4
Sprawozdanie z ćwiczenia
Sprawozdanie z dwiczenia powinno zawierad:
protokół z pomiarów,
wykresy charakterystyk elektromechanicznych I, P
1
, M,
= f(P
2
),
wykresy kompensatorowe silnika I
Q
, I
f
, cos
= f(P
1
),
obliczoną wartośd znamionowej przeciążalności momentem,
uwagi i wnioski.
5
Pytania kontrolne
Omówid zalety i wady silników synchronicznych.
Scharakteryzowad znane metody rozruchu silników synchronicznych.
Wyjaśnid przebiegi składowych momentu rozruchowego w czasie rozruchu asynchronicznego.
Co to jest moment wpadu silnika synchronicznego?
Omówid przebieg charakterystyk elektromechanicznych silnika synchronicznego.
Jakie są możliwości kompensacji mocy biernej za pomocą silnika synchronicznego?
Co to jest przeciążalnośd momentem silnika synchronicznego?
130
ĆWICZENIE 25
WYZNACZANIE SPRAWNOŚCI MASZYNY SYNCHRONICZNEJ
1
Program ćwiczenia
Pomiar rezystancji uzwojeo maszyny synchronicznej.
Pomiar strat jałowych metodą silnikową.
Pomiar strat obciążeniowych metodą silnikową.
Wyznaczenie strat wzbudzenia.
Obliczenie sprawności.
2
Cel ćwiczenia
Celem dwiczenia jest wyznaczenie strat i sprawności maszyny synchronicznej i porównanie jej z
danymi znamionowymi maszyny oraz wymaganiami norm. Ustala ona dopuszczalne odchyłki
sprawności znamionowej od wyznaczonej metodą pomiaru strat. Nie powinny one przekraczad
wartości:
0,15·(1–
) dla maszyn o mocy 50kW,
0,1·(1–
) dla maszyn o mocy 50kW.
Pomiar sprawności jest jednym z podstawowych pomiarów prób typu i wyrobu maszyn
synchronicznych, dlatego znajomośd metody oraz techniki pomiaru jest ważna. Zastosowana metoda
wyznaczania sprawności przez pomiar strat jest powszechnie stosowana do wszystkich maszyn i
transformatorów większych mocy, gdyż jest dużo taosza i gwarantuje większą dokładnośd niż metoda
bezpośredniego wyznaczania sprawności. Wyniki uzyskane tą metodą zawierają wiele danych
ważnych dla konstruktorów maszyn, gdyż informują o wielkości i miejscach głównych źródeł
wydzielania ciepła w maszynach, co pozwala na doskonalenie ich konstrukcji.
Znanych jest wiele metod pomiaru poszczególnych strat. W dwiczeniu zastosowano tzw. metodę
silnikową.
3
Omówienie programu ćwiczenia
3.1
Uwagi ogólne
Ogólnie sprawność prądnicy synchronicznej można wyrazić wzorem
(25.1)
w którym: P
1
,P
2
– odpowiednio moc pobierana i oddawana przez maszynę,
P
s
– suma wszystkich strat.
Po podstawieniu do (25.1) P
2
= U·I·cos
otrzymuje się
(25.2)
131
Straty występujące w maszynie synchronicznej najogólniej można podzielid na:
jałowe
P
0
,
obciążeniowe
P
obc
,
wzbudzeniowe
P
f
.
Poszczególne straty na ogół nie są stałe, lecz zależą od parametrów stanu pracy maszyny, a więc od
U, I, cos
oraz f. Zwykle wyznacza się je dla warunków znamionowych, gdyż obliczona na ich
podstawie sprawnośd jest porównywana ze sprawnością deklarowaną przez producenta na tabliczce
znamionowej.
Straty i sprawnośd zostaną w dwiczeniu wyznaczone dla prądu twornika (0,25; 0,5; 0,75; 1,0)·I
an
przy
U = U
n
, cos
= 1.
3.2
Pomiary rezystancji uzwojeń maszyny badanej
W dwiczeniu należy wykonad pomiar rezystancji uzwojeo twornika i wzbudzenia, gdyż wartości te są
niezbędne do wyznaczania strat. Pomiary należy wykonad metodą mostkową dla maszyny nie
nagrzanej. Wyniki pomiarów zestawid w tabeli 25.1.
Tabela 25.1
Lp.
R
u
R
v
R
w
R
aśr
R
f
R
fśr
Uwagi
o
= ...C
3.3
Pomiar strat jałowych
Straty jałowe P
0
są sumą strat mechanicznych
P
m
i strat w żelazie
P
Fe
(25.3)
Straty mechaniczne zależą od prędkości obrotowej, a zatem w maszynach synchronicznych przy
f = const są one stałe.
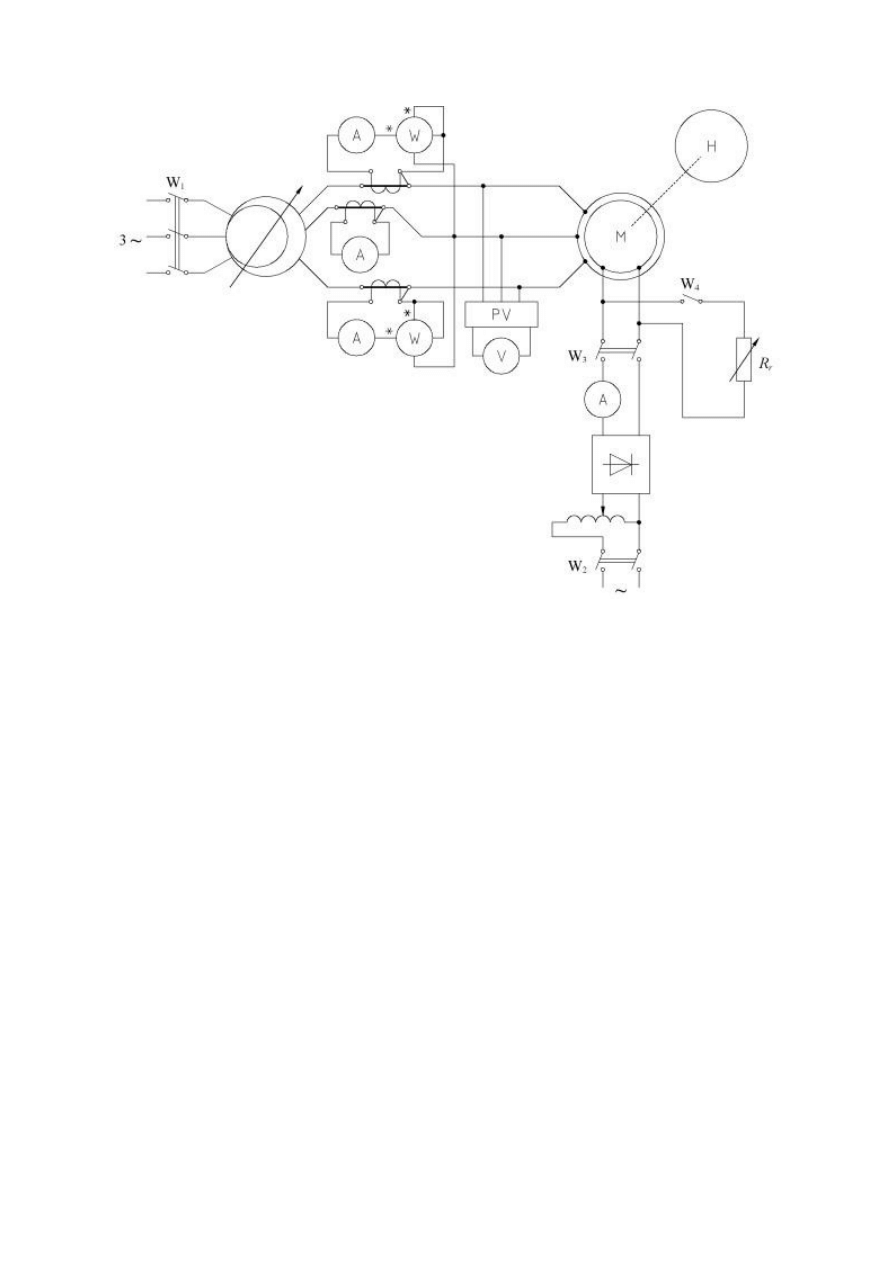
132
Rys. 25.1. Układ pomiarowy do wyznaczania sprawności
Straty w żelazie są w przybliżeniu proporcjonalne do kwadratu indukcji magnetycznej w
magnetowodzie twornika. Wartośd indukcji zmienia się wraz z obciążeniem, zatem straty jałowe nie
są stałe. Zwykle wyznacza się je w funkcji SEM szczelinowej E
, która przy stałej prędkości obrotowej
maszyny jest wprost proporcjonalna do indukcji magnetycznej w szczelinie powietrznej.
Straty jałowe zostaną wyznaczone metodą silnikową, w układzie jak na rys. 25.1. Twornik jest zasilany
napięciem trójfazowym przez autotransformator. Obwód wzbudzenia zawiera opornik zwierający,
umożliwiający rozruch maszyny metodą asynchroniczną opisaną w dwiczeniu 24.
Po uruchomieniu maszyny mierzy się moc pobieraną przez nią w zakresie napięd twornika od 1,2·U
n
do około 0,3·U
n
. W tym przedziale należy wykonad około 8 pomiarów. Dla każdego punktu
pomiarowego należy tak regulowad prąd wzbudzenia I
f
, aby współczynnik mocy cos
= 1,0. (Prąd
twornika przy cos
= 1 osiąga wartośd minimalną, a obydwa watomierze w układzie Arona mają
identyczne wskazania). Wyniki pomiarów należy zestawid w tabeli 25.2.
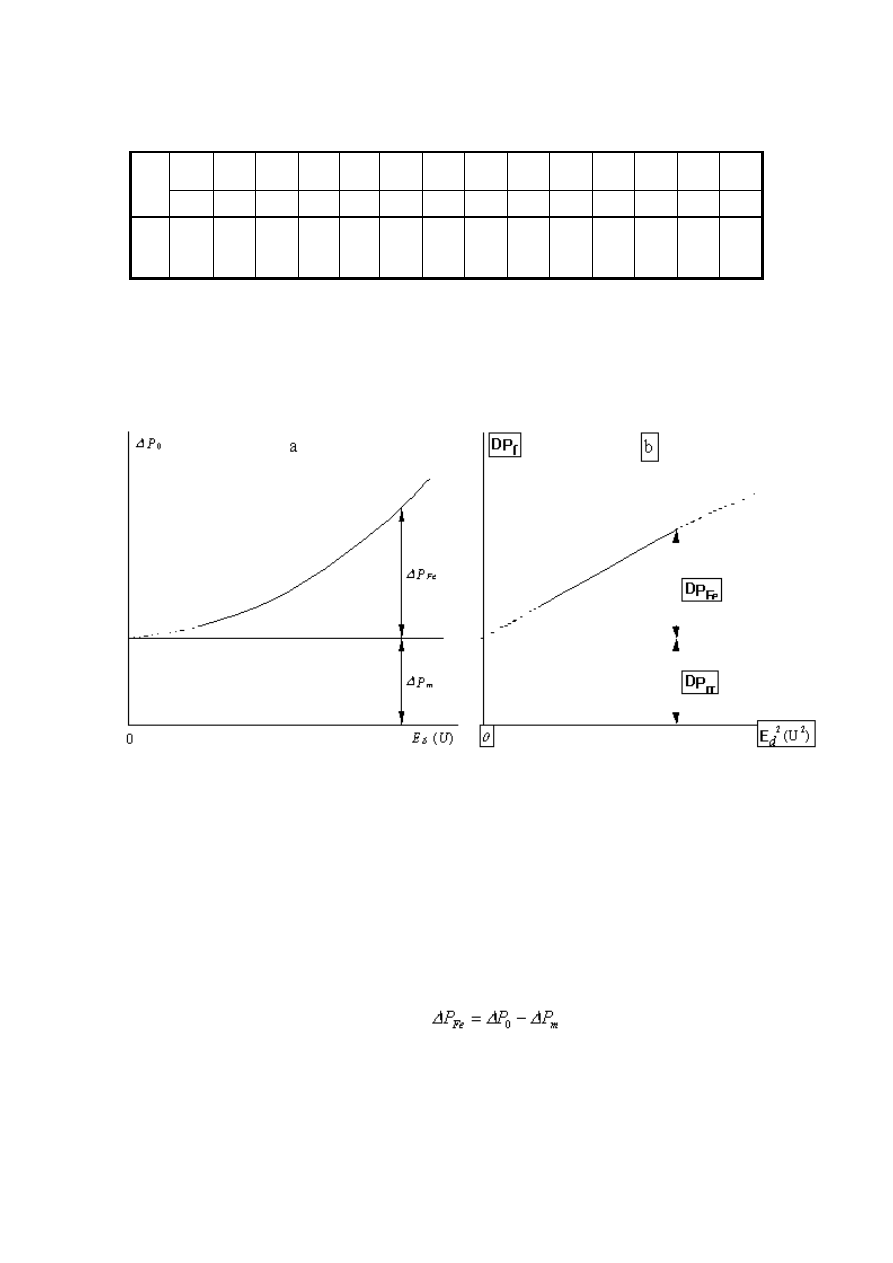
133
Tabela 25.2
Lp.
I
f
U
uv
U
wu
U
śr
U
2
I
u
I
v
I
w
I
śr
P
I
P
II
P
P
obc
P
0
A
V
V
V
V
2
A
A
A
A
W
W
W
W
W
W powyższej tabeli:
P = P
I
+ P
II
– moc pobrana z sieci,
P
obc0
= 3·I
śr
2
·R
a
– straty obciążeniowe przy biegu jałowym,
gdzie: R
a
– rezystancja fazy uzwojenia twornika zmierzona w p. 3.2,
P
0
= P –
P
obc0
– straty jałowe.
Rys. 25.2. Wykres strat jałowych maszyny: a) w funkcji napięcia (U), b) w funkcji kwadratu napięcia (U
2
)
Na podstawie przeprowadzonych pomiarów i obliczeo należy wykreślid zależnośd
P
0
= f(E
) oraz
P
0
= f(E
2
) (rys. 25.2). Ze względu na niewielką wartośd prądu twornika podczas pomiarów można
przyjąd, że E
= U.
Na przedłużeniu przebiegu
P
0
= f(E
2
) (który dla mniejszych wartości napięcia jest linią prostą) do
przecięcia z osią rzędnych znajduje się wartośd strat mechanicznych
P
m
. Zatem straty w żelazie dla
danej wartości E można wyznaczyd jako
(25.3)
134
3.4
Pomiar strat obciążeniowych
Wyznaczanie strat obciążeniowych odbywa się w układzie jak w p. 3.3 przy pracy kompensatorowej
maszyny, tzn. przy obciążeniu prądem biernym. Wykonuje się dwa punkty pomiarowe przy tym
samym prądzie twornika – dla maszyny niewzbudzonej oraz przewzbudzonej.
Prąd wzbudzenia maszyny pracującej jałowo należy zmniejszyd do I
f
= 0, lub do takiej wartości, przy
której nie następuje jeszcze utrata synchronizmu. Po dokładnym nastawieniu, za pomocą
autotransformatora, napięcia twornika U = U
n
należy zmierzyd prąd twornika oraz moc pobieraną z
sieci P
a
. Następnie, przy nie zmienionej wartości napięcia twornika, należy przewzbudzid maszynę aż
prąd twornika osiągnie taką samą wartośd jak przy niedowzbudzeniu. Dla takich warunków należy
ponownie zmierzyd moc pobieraną z sieci P
b
. Wyniki pomiarów zestawid w tabeli 25.3.
Tabela 25.3
Lp.
I
f
U
uv
U
vw
U
wu
U
śr
I
u
I
v
I
w
I
śr
P
I
P
II
P
P’
obc
A
V
V
V
V
A
A
A
A
W
W
W
W
a)
P
a
b)
P
b
W powyższej tabeli w rubryce a) należy zestawid wyniki pomiarów przy niedowzbudzeniu, w rubryce
b) przy przewzbudzeniu.
Moc P
a(b)
pobierana z sieci jest sumą strat obciążeniowych
P
obc
oraz strat jałowych
P
0
. Straty
obciążeniowe w obydwu punktach pomiarowych mają taką samą wartośd, gdyż prądy twornika były
jednakowe.
SEM E
można obliczyd z przybliżonego wzoru
(25.4)
w którym znak „–” dotyczy przypadku niedowzbudzenia, a znak „+” przewzbudzenia.
Z powyższego wynika, że straty jałowe w maszynie niedowzbudzonej będą mniejsze niż dla E = U
n
, a
w maszynie przewzbudzonej większe. Można z dośd dobrym przybliżeniem uznad, że średnia wartośd
tych strat odpowiada SEM E
= U
n
. Zatem straty obciążeniowe dla danej wartości prądu twornika I
’
a
,
przy którym dokonano pomiarów, można obliczyd jako
(25.5)
135
gdzie:
,
P
0n
– straty jałowe odpowiadające E
= U
n
(odczytane z wykresu na rys. 25.2a).
Straty obciążeniowe dla dowolnej wartości prądu twornika można obliczyd ze wzoru
(25.6)
Straty obciążeniowe można podzielid na
–
podstawowe
P
obcp
,
–
dodatkowe
P
obcd
.
Straty podstawowe odpowiadają stratom na rezystancji uzwojenia twornika mierzonej prądem
stałym.
Straty dodatkowe wynikają z pozornego wzrostu rezystancji uzwojeo na skutek nierównomiernego
rozkładu gęstości prądu w prętach uzwojenia oraz strat od wyższych harmonicznych pola twornika i
strat wywołanych strumieniem rozproszenia w masywnych elementach konstrukcyjnych stojana i
wirnika. Straty dodatkowe można zatem obliczyd jako różnicę strat obciążeniowych całkowitych i
strat podstawowych obliczonych ze wzoru
(25.7)
Wartośd R
a
, mierzona prądem stałym, musi byd wyznaczona w takiej samej temperaturze, w jakiej
mierzono straty obciążenia. W tym celu, natychmiast po zakooczeniu pomiaru przy maszynie
przewzbudzonej, należy odłączyd maszynę od sieci i po jej zatrzymaniu przeprowadzid pomiar
rezystancji w sposób identyczny jak w p. 3.2.
Straty dodatkowe zatem wyniosą
(25.8)
Na podstawie zależności (25.6, 25.7, 25.8) należy obliczyd straty
P
obc
,
P
obcp
i
P
obcd
dla prądu
przemiennego. Wyniki obliczeo zestawid w tabeli 25.4
Tabela 25.4
I
a
R
a
P
obc
P
obcp
P
obcd
Uwagi
A
W
W
W
I
n
136
3.5
Wyznaczanie strat wzbudzenia
Straty wzbudzenia w zależności od rodzaju układu zasilającego uzwojenie wzbudzenia mogą
obejmowad, oprócz strat w samym uzwojeniu, również straty w opornikach regulujących i we
wzbudnicy, jeśli jest ona mechanicznie sprzęgnięta z maszyną synchroniczną. W dwiczeniu można
przyjąd, że straty wzbudzenia są równe stratom w samym uzwojeniu
(25.9)
Prąd wzbudzenia, odpowiadający danym warunkom pracy maszyny, można wyznaczyd na podstawie
wykresu Potiera lub wykresu szwedzkiego albo odczytad z charakterystyki regulacji I
f
= f(I
a
) przy
U = const, cos
= const, f = const (patrz dw. 22).
3.6
Zestawienie strat do wyznaczenia sprawności prądnicy synchronicznej
Na podstawie uzyskanych wyników pomiarów i obliczeo należy zestawid wartości strat maszyny
badanej do wyznaczenia sprawności dla założonych wartości prądu twornika I
a
= (0,25; 0,5; 0,75; 1,0;
1,25)·I
n
przy U = U
n
i cos
= cos
n
. Wyniki obliczeo należy zestawid w tabeli 25.5.
Wyznaczone straty należy przeliczyd na umowną temperaturę odniesienia, która wynosi:
–
348K (75°C) – dla klas izolacji A, E i B,
–
388K (115°C) – dla klas izolacji F i H.
Maszyna badana ma klasę izolacji E, zatem wszystkie straty zależne od temperatury będą przeliczane
na 75°C. Wartości przeliczone na tę temperaturę oznaczono gwiazdką ().
137
Tabela 25.5
Lp.
I
a
/ I
n
I
a
Straty obciążeniowe
Straty jałowe Straty wzbudz.
P
2
P
*
obcp
P
*
obcd
P
*
obc
E
P
0
I
f
P
f
–
A
W
W
W
V
W
A
W
W
–
1
2
3
4
5
0,25
0,50
0,75
1,00
1,25
3.6.1
Straty obciążeniowe
Straty obciążeniowe podstawowe oblicza się na podstawie rezystancji uzwojenia twornika,
zmierzonej w p. 3.2 i przeliczonej na 75°C zgodnie ze wzorem
(25.10)
gdzie:
o
– temperatura otoczenia, w C.
Przyjmuje się, ze straty dodatkowe nie zależą od temperatury. Dla poszczególnych prądów twornika
można je obliczyd ze wzoru
(25.11)
w którym:
P
obcdn
– straty dodatkowe przy prądzie znamionowym odczytane z tabeli 25.4.
Całkowite straty obciążeniowe są równe
(25.12)
3.6.2
Straty jałowe
Straty jałowe odczytuje się z wykresu
P
0
= f(E
) (rys. 25.2a). Wartośd SEM E
, odpowiadającą
poszczególnym założonym wartościom prądów twornika, oblicza się z przybliżonego wzoru
(25.13)
138
w którym: znak „+” odpowiada pracy prądnicowej a znak „-” pracy silnikowej,
R
*
a
– rezystancja fazy uzwojenia twornika dla prądu przemiennego wynikająca z całkowitych
strat obciążeniowych obliczona według wzoru
(25.14)
na podstawie danych w tab. 25.4
X
p
– reaktancja Potiera ( podana lub wyznaczona jak w dwiczeniu 22).
3.6.3
Straty wzbudzenia
Straty wzbudzenia przeliczone na umowną temperatura odniesienia znajduje się ze wzoru
(25.15)
w którym: I
f
– prąd wzbudzenia odpowiadający danemu prądowi twornika odczytany z
charakterystyk regulacji (dwicz. 22.),
R
f
– rezystancja uzwojenia wzbudzenia mierzona w p. 3.2. w temperaturze otoczenia
o
.
3.6.4
Obliczenia sprawności
Straty całkowite dla danego prądu twornika są równe
(25.16)
Moc oddawana przez prądnicę wynosi
(25.17)
Sprawnośd prądnicy oblicza się ze wzoru
(25.18)
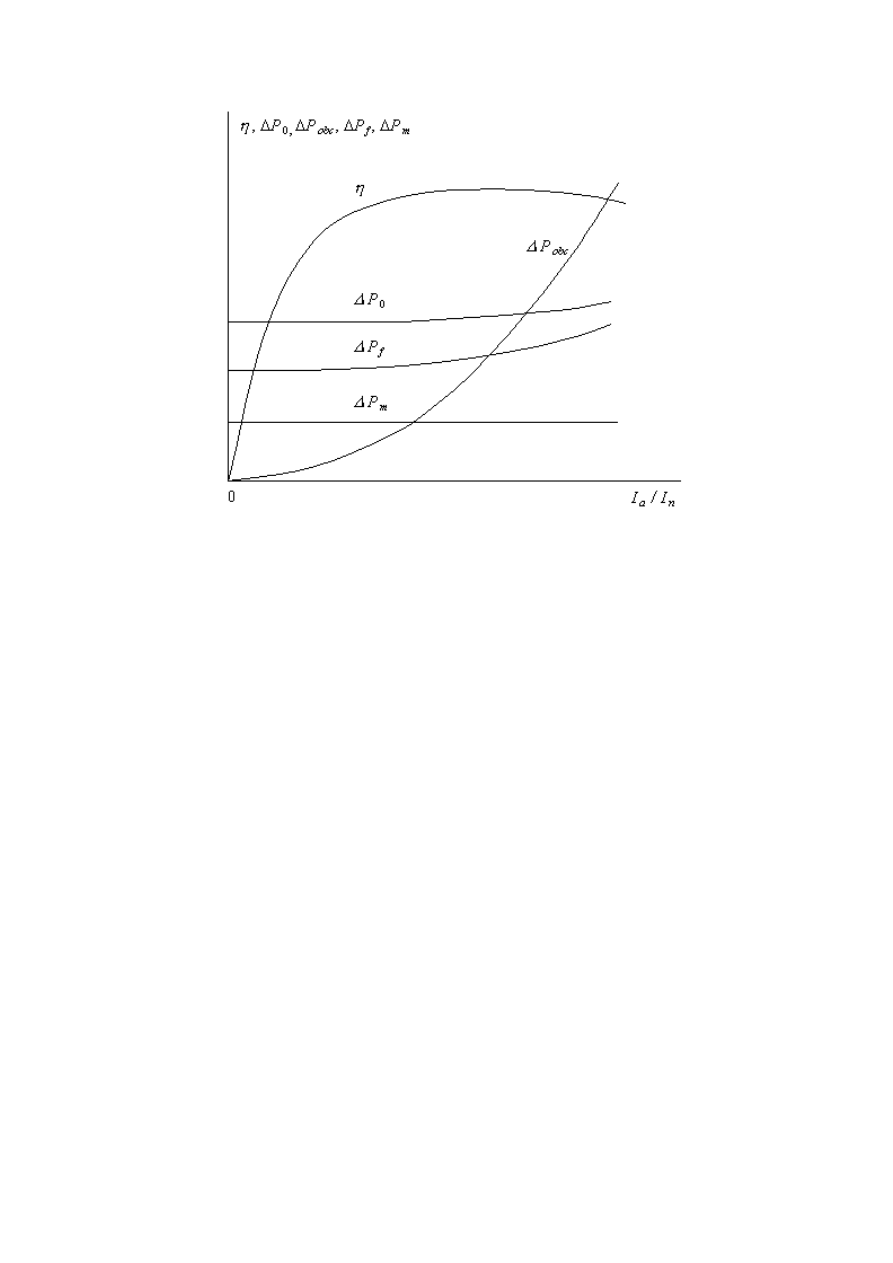
139
Rys. 25.3. Charakterystyki silnika synchronicznego
Wyniki obliczeo strat i sprawności dla poszczególnych założonych wartości prądu twornika
zestawione w tabeli 25.5 posłużą do wyznaczenia krzywych:
,
P
*
obc
,
P
0
,
P
f
= f(I
a
/ I
n
) przy U
n
,
cos
= 1. Ich teoretyczne przebiegi przedstawiono na rys. 25.3. Wartośd sprawności wyznaczoną dla
warunków znamionowych należy porównad z podaną przez producenta. Sprawdzid, czy spełnia ona
wymagania normy.
4
Sprawozdanie z ćwiczenia
Sprawozdanie z dwiczenia powinno zawierad:
protokół z pomiarów,
charakterystyki
P
0
= f(E
) i
P
0
= f(E
2
),
charakterystyki
,
P
*
obc
,
P
0
,
P
f
= f(I
a
/ I
n
) przy U
n
, cos
= 1,
porównanie otrzymanych wyników z wymaganiami norm,
uwagi i wnioski.
5
Pytania kontrolne
Scharakteryzowad na czym polega metoda wyznaczania sprawności przez pomiar strat. Omówid
wady i zalety tej metody w porównaniu z metodą bezpośredniego pomiaru mocy pobieranej i
oddawanej.
Jakie rodzaje strat występują straty w maszynach synchronicznych?
Od czego zależą straty jałowe?
Wyjaśnid sposób wyznaczania strat mechanicznych.
Omówid rozdział strat obciążeniowych. Jakie są przyczyny występowania strat dodatkowych?
Przeanalizowad zależnośd sprawności maszyny synchronicznej od współczynnika mocy. Ile wynosi
sprawnośd maszyny pracującej jako kompensator?
140
ĆWICZENIE 31
BADANIE TRANSFORMATORA TRÓJFAZOWEGO
1
Program ćwiczenia
Pomiar rezystancji uzwojeo.
Pomiar przekładni.
Pomiar charakterystyk stanu jałowego.
Pomiar charakterystyk zwarcia.
Wyznaczenie zmienności napięcia.
Wyznaczenie sprawności transformatora metodą strat poszczególnych.
2
Cel ćwiczenia
Celem dwiczenia jest poznanie ważniejszych prób i pomiarów wykonywanych podczas technicznego
odbioru transformatora. Próby stanu jałowego, zwarcia i obciążenia dostarczają informacji
pozwalających na ocenę jakości konstrukcji transformatora. Charakterystyki uzyskiwane w tych
próbach ułatwiają zrozumienie zasady działania transformatora i zjawisk zachodzących w różnych
stanach pracy.
3
Omówienie programu ćwiczenia
Uzwojenie transformatora, które jest zasilane nazywa się uzwojeniem pierwotnym. Drugie z uzwojeo
to uzwojenie wtórne. Te same uzwojenia w zależności od swych napięd znamionowych nazywają się
uzwojeniem górnego lub uzwojeniem dolnego napięcia.
3.1
Pomiar rezystancji uzwojeń
Pomiar rezystancji uzwojeo należy wykonad metodą techniczną. Jeśli uzwojenia są połączone w
gwiazdę lub zygzak z wyprowadzonym punktem zerowym, mierzy się rezystancje fazowe między
odpowiednim zaciskiem a punktem zerowym. W przypadku połączenia uzwojeo w gwiazdę z
izolowanym punktem zerowym mierzy się rezystancje między kolejnymi zaciskami faz R
AB
, R
BC
, R
CA
, i
następnie oblicza rezystancje fazowe ze wzorów
(31.1)
Dla uzwojeo połączonych w trójkąt mierzy się, jak poprzednio, rezystancje R
AB
, R
BC
, R
CA
i oblicza
rezystancje fazowe ze wzorów
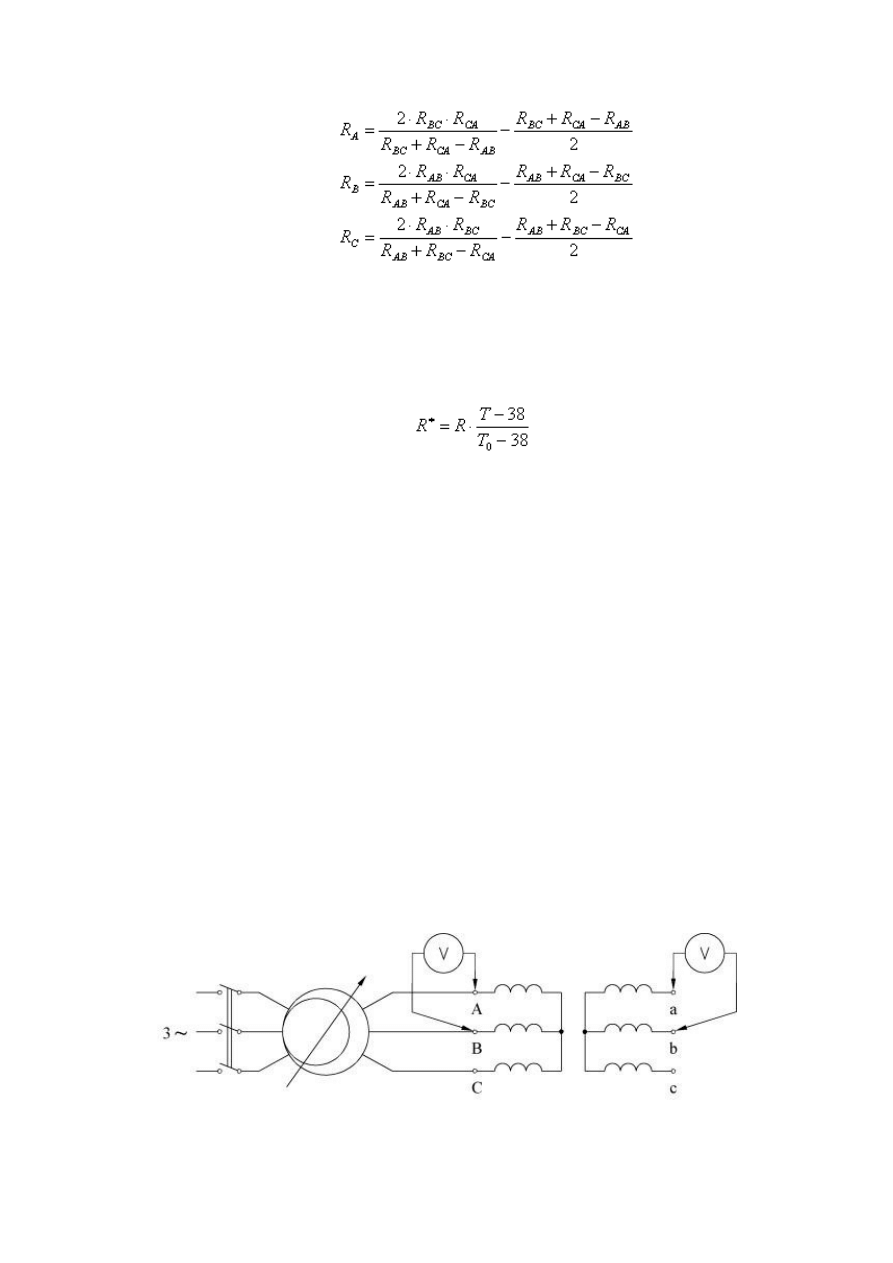
141
(31.2)
Zmierzone wielkości rezystancji należy przeliczyd na umowną temperaturę (348K dla izolacji klasy A,
E, B lub 388K dla izolacji klasy F i H).
Rezystancję uzwojenia miedzianego przelicza się według wzoru
(31.3)
w którym: R
*
– rezystancja w umownej temperaturze pracy,
R – rezystancja w temperaturze otoczenia,
T – umowna temperatura pracy,
T
o
– temperatura otoczenia.
Dla każdego z uzwojeo należy wykonad po trzy pomiary, następnie obliczyd wartośd średnią.
Rezystancje fazowe transformatora nie powinny się różnid. Różnice większe niż 3% wartości średniej
wymagają ustalenia ich źródła i stwierdzenia, czy nie dyskwalifikują one transformatora.
3.2
Pomiar przekładni
Przekładnią transformatora jest stosunek napięd znamionowych, występujących jednocześnie na
zaciskach transformatora w stanie jałowym. Przekładnie transformatorów przeznaczonych do
współpracy nie mogą się różnid więcej niż 0,5%. Z tego względu metoda pomiaru musi
gwarantowad dużą dokładnośd.
Przekładnie mierzy się jedną z dwóch metod:
a)
kompensacyjną z zastosowaniem kompensatora Kellera,
b)
woltomierzową, polegającą na jednoczesnym pomiarze napięd po obu stronach transformatora
w stanie jałowym.
Rys. 31.1. Układ do pomiaru przekładni
142
Metodę woltomierzową stosuje się częściej, ponieważ jest prosta. Aby uzyskad wymaganą
dokładnośd pomiaru, należy stosowad woltomierz klasy 0,2. Pomiary wykonuje się w układzie
przedstawionym na rysunku 31.1. Badany transformator zasila się obniżonym napięciem od strony
górnego napięcia. Wskazania woltomierzy, przyłączonych do uzwojeo umieszczonych na tych samych
kolumnach, powinny byd odczytane jednocześnie. W ten sposób unika się błędów spowodowanych
ewentualną asymetrią napięcia zasilania i jego wahaniami. Zmierzone wartości napięd należy
zestawid w tabeli 31.1.
Tabela 31.1
Lp.
U
AB
U
BC
U
CA
U
ab
U
bc
U
ca
a
b
c
śr
Uwagi
V
V
V
V
V
V
–
–
–
–
Na podstawie zmierzonych wartości napięd oblicza się przekładnię ze wzoru
(31.4)
przy czym: U
g0
– napięcie górne (U
AB
, U
BC
, U
CA
),
U
d0
– napięcie dolne (U
ab
, U
bc
, U
ca
).
Pomiar przekładni można też przeprowadzid zasilając transformator jednofazowo. Jeśli nie ma
dostępnego punktu zerowego, mierzy się napięcia międzyfazowe.
Przekładnie
a
,
b
,
c
, powinny byd jednakowe i równe przekładni znamionowej
n
, z
uwzględnieniem odchyłek spowodowanych uchybami przyrządów i odczytów oraz tolerancji
przekładni. W niektórych przypadkach może również byd istotny uchyb spowodowany prądem
woltomierza i prądem stanu jałowego transformatora.
3.3
Pomiar charakterystyk stanu jałowego
Charakterystyki strat jałowych, prądu stanu jałowego oraz współczynnika mocy w stanie jałowym
informują o własnościach obwodu magnetycznego transformatora. Orientacyjny przebieg tych
charakterystyk przedstawiono na rys. 31.2.
Wartośd prądu jałowego, wyrażona w procentach prądu znamionowego i mierzona przy
znamionowym napięciu, jest wielkością charakteryzującą transformator. Dla jednostek małych osiąga
10%, a dla jednostek największych mocy 1%.
Prąd jałowy można rozłożyd na składową czynną I
0w
i składową bierną I
0
. Składowa czynna jest w
przybliżeniu proporcjonalna do napięcia U i odpowiada stratom mocy w rdzeniu transformatora.
Przebieg charakterystyki składowej biernej I
0
. = f(U
0
) kształtem odpowiada charakterystyce
143
magnesowania rdzenia. Wartości składowych prądu jałowego zależą od wartości współczynnika
mocy:
(31.5)
Wobec małej wartości współczynnika mocy (rys. 31.2) w całym zakresie napięd, składowa czynna
prądu jałowego jest bardzo mała. Składowa bierna I
0
. ma wartośd zbliżoną do I
0
. Można więc
uważad, że charakterystyka I
0
= f(U
0
) również odzwierciedla kształt krzywej magnesowania rdzenia. W
prawidłowo skonstruowanym transformatorze punkt pracy przy znamionowym napięciu znajduje się
na zakrzywieniu charakterystyki magnesowania. Gdy napięcie znamionowe badanego transformatora
nie jest znane, można je w przybliżeniu określid na podstawie charakterystyki I
0
= f(U
0
).
Moc pobrana przez transformator w stanie jałowym P
0
jest zużywana na pokrycie strat w rdzeniu
P
Fe
, strat na rezystancji uzwojenia zasilanego 3·I
0
2
·R
1
oraz strat dielektrycznych w izolacji
P
iz
(31.6)
Straty w izolacji są niewielkie i zazwyczaj można je pomijad. Również straty w uzwojeniu są małe
(szczególnie dla jednostek o małym prądzie jałowym) i w badaniach orientacyjnych można uważad, że
P
0
=
P
Fe
.
Straty w rdzeniu
P
Fe
przy stałej częstotliwości zależą od masy żelaza m
Fe
oraz indukcji B w potędze
zależnej od gatunku blach i wartości indukcji
(31.7)
W zakresie indukcji stosowanych w transformatorach
zawiera się w przedziale 23, przy czym
wartości zbliżone do 2 odnoszą się do blach walcowanych na gorąco, a zbliżone do 3 odnoszą się do
blach walcowanych na zimno. Przy stałej częstotliwości napięcie jest proporcjonalne do indukcji, więc
straty w żelazie są proporcjonalne do U
. Stąd wynika paraboliczny przebieg krzywej strat mocy na
rys. 31.2.
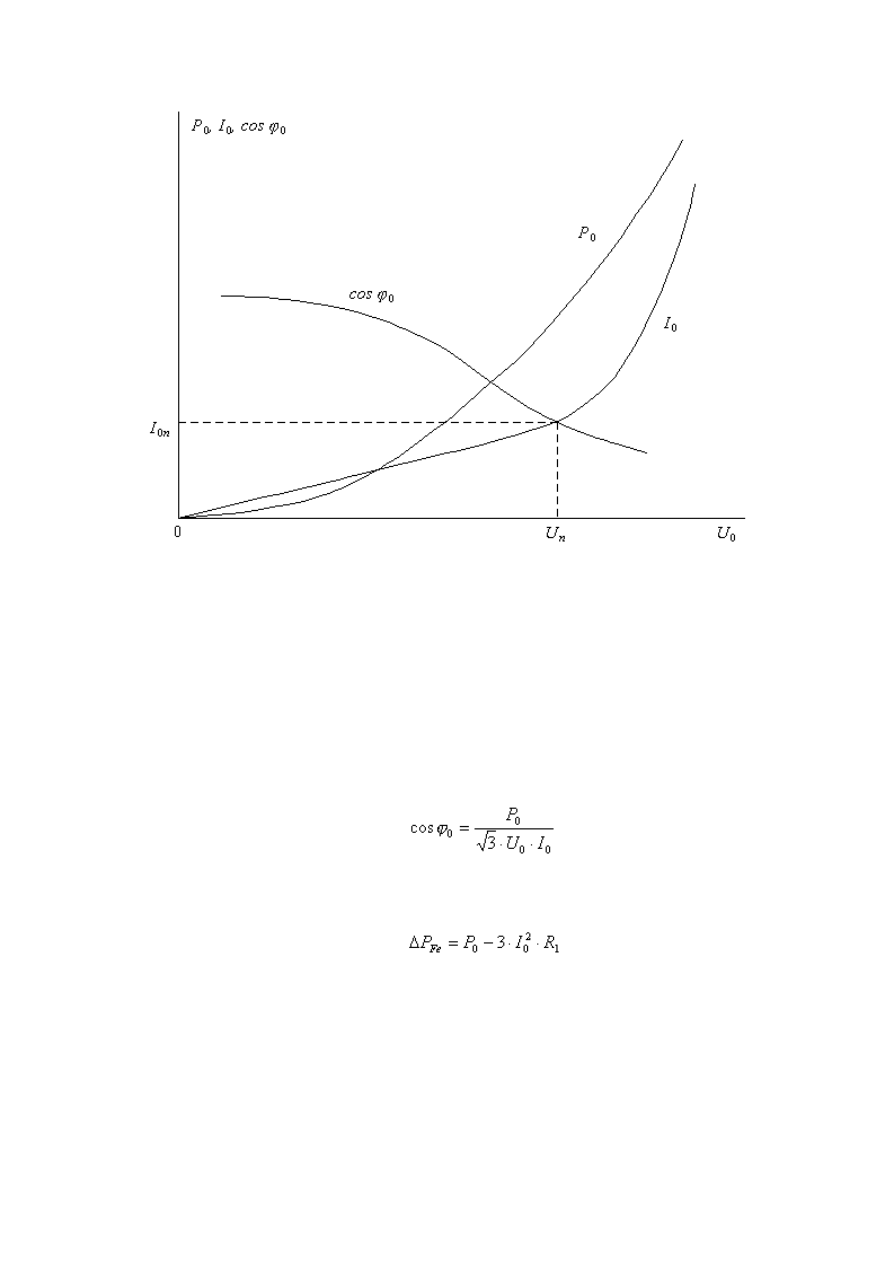
144
Rys. 31.2. Charakterystyki stanu jałowego
Pomiary charakterystyk stanu jałowego wykonuje się w układzie przedstawionym na rysunku 31.3. Ze
względu na dokładnośd pomiarów oraz bezpieczeostwo obsługi pomiary przeprowadza się przy
zasilaniu strony dolnego napięcia. Po stronie górnego napięcia pojawia się wówczas duża wartośd
napięcia, należy więc zachowad szczególną ostrożnośd. Zmieniając napięcie od 0 do 1,1·U
n
, mierzy się
moc, prądy i napięcia, a wyniki notuje w tabeli 31.2.
Na podstawie wyników pomiarów należy obliczyd wartośd współczynnika mocy
(31.8)
oraz strat w rdzeniu
(31.9)
a następnie sporządzid charakterystyki I
0
, I
0w
, P
0
, cos
0
= f(U
0
).
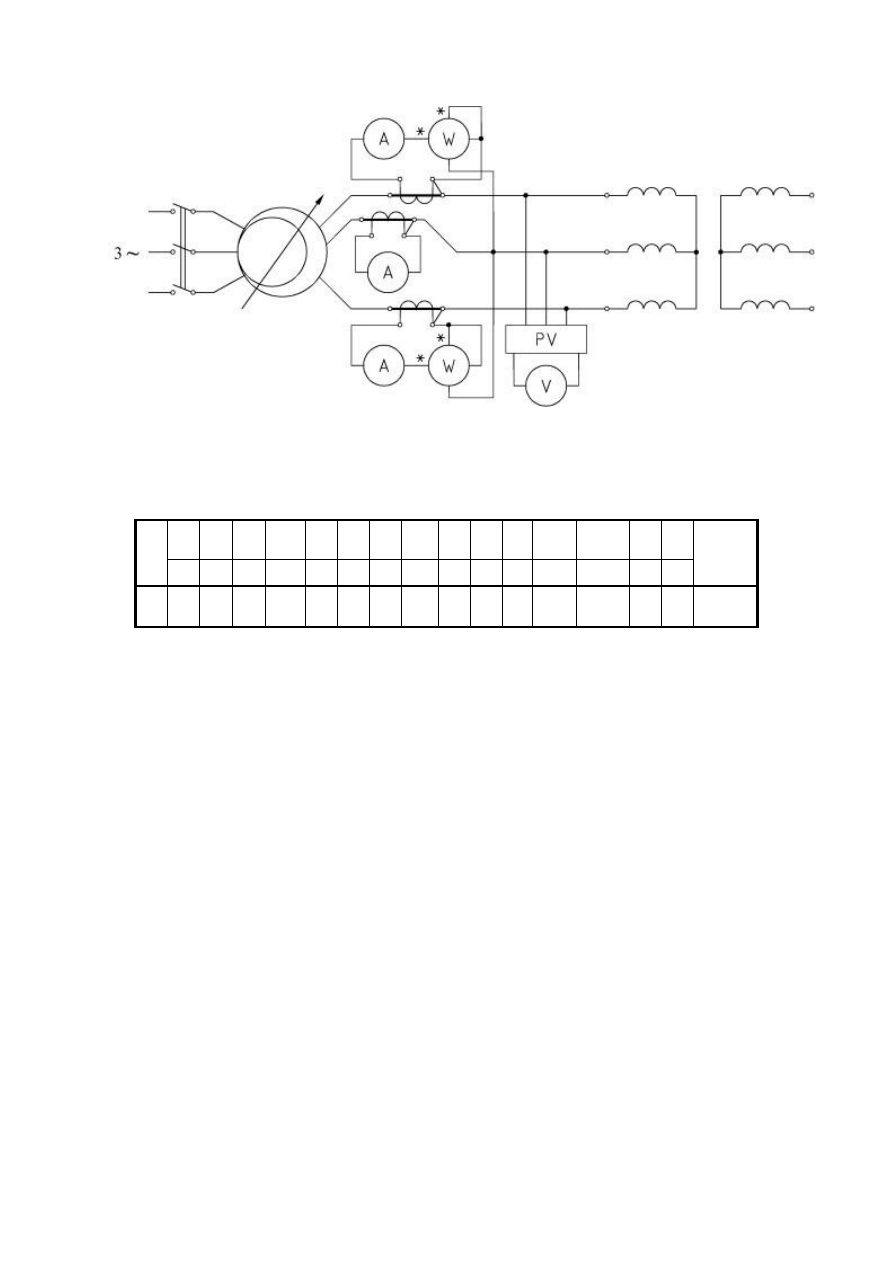
145
Rys. 31.3. Układ do pomiaru charakterystyk stanu jałowego
Tabela 31.2
Lp.
U
ab
U
bc
U
ca
U
0śr
I
a
I
b
I
c
I
0śr
P
I
P
II
P
0
P
Fe
cos
0
I
0w
I
0
Uwagi
V
V
V
V
A
A
A
A
W W W
W
–
A
A
3.4
Pomiar charakterystyk stanu zwarcia
Zwarciem transformatora nazywa się stan, w którym jedno z uzwojeo zasilane jest obniżonym
napięciem, podczas gdy zaciski drugiego uzwojenia są zwarte.
Celem próby zwarcia jest wyznaczenie napięcia zwarcia i strat obciążeniowych. Napięcie zwarcia jest
to takie napięcie uzwojenia pierwotnego przy zwartym uzwojeniu wtórnym, pod wpływem którego w
uzwojeniach transformatora płyną prądy znamionowe. Przy obniżonym napięciu, nie
przekraczającym w czasie próby zwarcia kilkunastu procent wartości napięcia znamionowego,
strumieo magnetyczny w rdzeniu jest niewielki. Straty w rdzeniu są więc również małe i można
uważad, że moc pobierana przez transformator równa jest stratom obciążeniowym. Próbę zwarcia
wykonuje się w układzie przedstawionym na rys. 31.4.
Uzwojenie górnego napięcia zasila się napięciem regulowanym, a uzwojenie dolnego napięcia -
zwiera. Zasilanie uzwojenia górnego napięcia jest podyktowane dokładnością pomiarów i łatwiejszym
doborem przyrządów (wyższe napięcie i niższy prąd). Pomiary rozpoczyna się od takiej wartości
napięcia, przy której prąd osiągnie wartośd około 1.1·I
n
. Następnie obniżając napięcie, mierzy się
napięcia, prądy i moc pobieraną przez transformator. Wyniki pomiarów należy zestawid w tabeli 31.3.
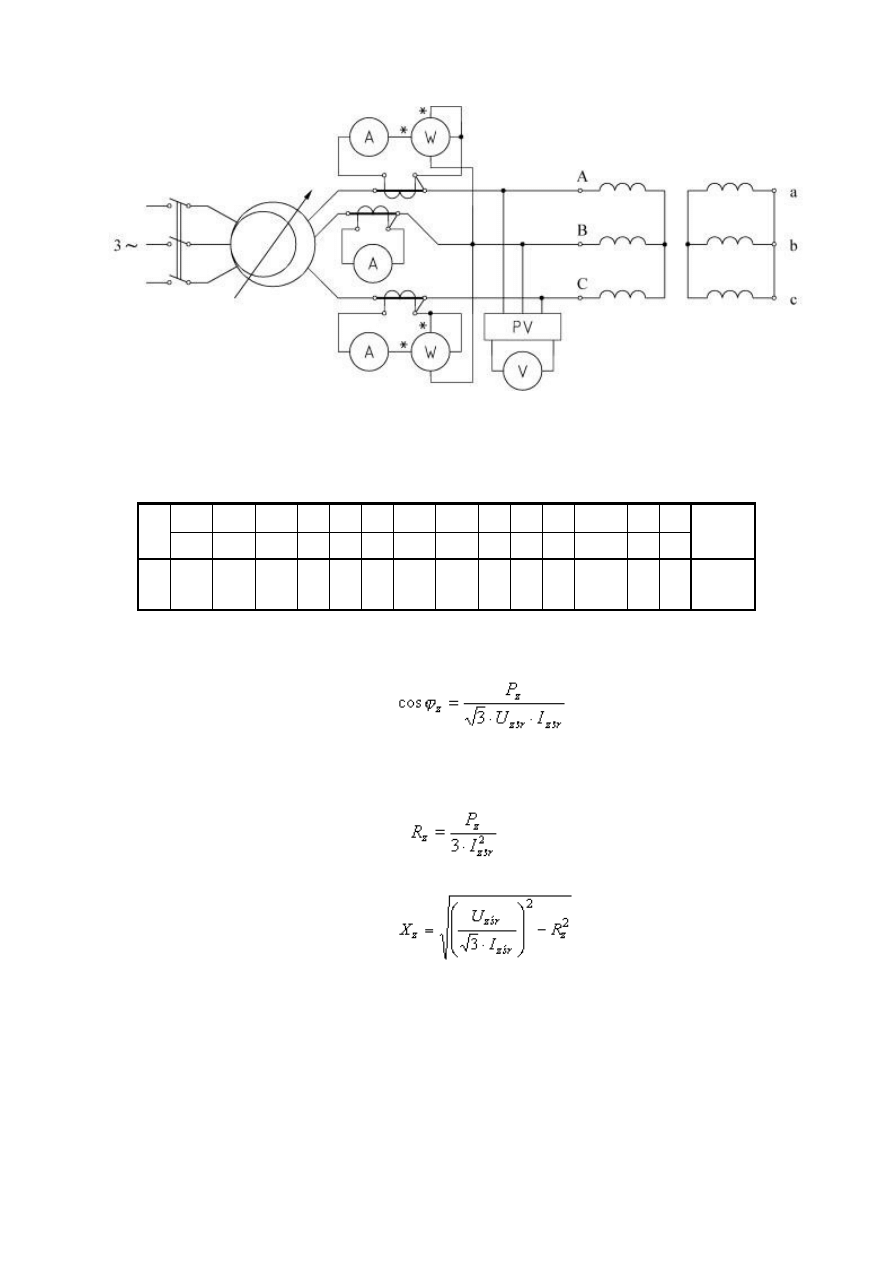
146
Rys. 31.4. Układ do pomiaru charakterystyk stanu zwarcia
Tabela 31.3
Lp.
U
AB
U
BC
U
CA
I
A
I
B
I
C
U
zśr
I
zśr
P
I
P
II
P
z
cos
z
R
z
X
z
Uwagi
V
V
V
A
A
A
V
A
W W W
–
Współczynnik mocy podczas zwarcia cos
z
oblicza się ze wzoru
(31.10)
natomiast parametry schematu zastępczego, rezystancję R
z
i reaktancję zwarcia X
z
z zależności
(31.11)
(31.12)
Na podstawie wyników pomiarów i obliczeo należy wykreślid charakterystyki I
z
, P
z
, cos
z
= f(U
z
),
których przykładowe przebiegi przedstawiono na rys. 31.5. Napięcie zwarcia odczytuje się z
charakterystyki I
z
= f(U
z
) dla prądu znamionowego (I
z
= I
n
) i wyraża w procentach napięcia
znamionowego (u
z
). Wartośd napięcia zwarcia powinna wynosid 3-12%, przy czym wartości większe
odnoszą się do transformatorów dużej mocy.
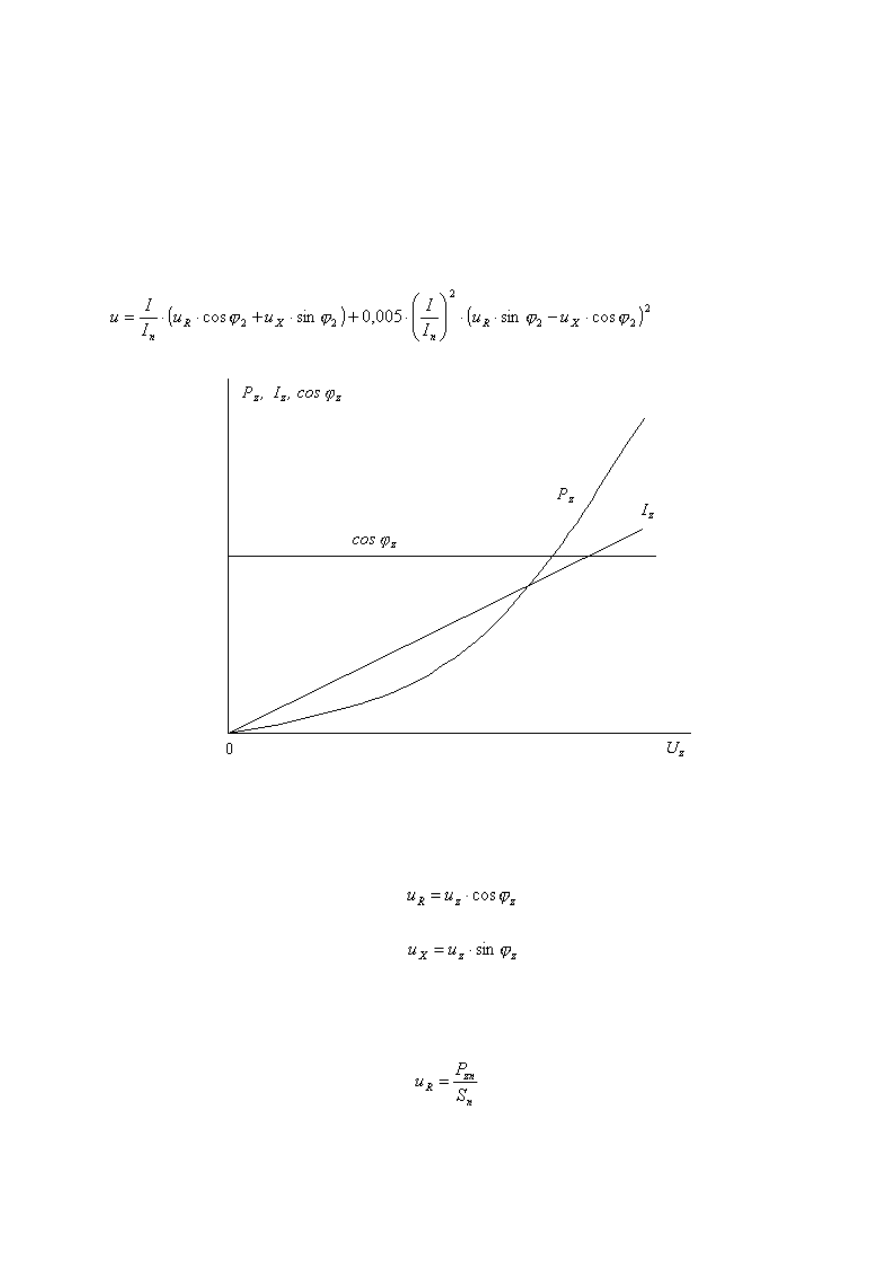
147
3.5
Wyznaczenie zmienności napięcia
Zmianę napięcia strony wtórnej w zależności od zmian obciążenia, przy stałej wartości napięcia
zasilania i stałym współczynniku mocy, ilustrują charakterystyki zewnętrzne U
2
= f(I
2
). Przebiegi tych
charakterystyk przy różnych rodzajach obciążenia pokazano na rysunku 31.6. Charakterystyki takie
można uzyskad z próby obciążenia bezpośredniego lub wyznaczyd na podstawie wyników próby
zwarcia. Względną zmianę napięcia strony wtórnej wywołaną zmianą obciążenia oblicza się ze wzoru:
(31.13)
Rys. 31.5. Charakterystyki zwarcia
Względne wartości składowych czynnej i biernej napięcia zwarcia oblicza się z zależności
(31.14)
(31.15)
Można również obliczyd te składowe na podstawie odczytanych z wykresów P
z
= f(U
z
) i I
z
= f(U) dla
I = I
n
strat mocy P
zn
w uzwojeniach. Wówczas
(31.16)
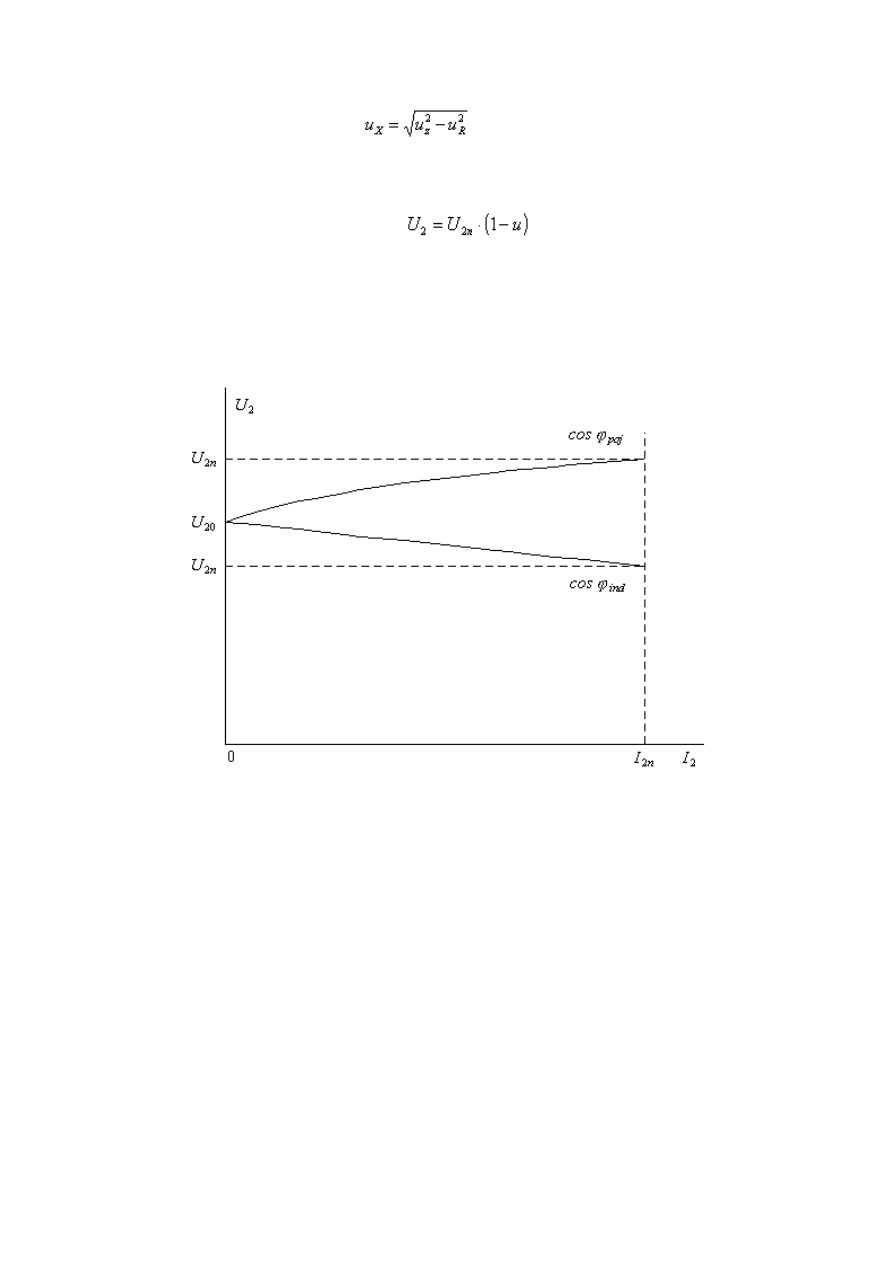
148
(31.17)
Napięcie strony wtórnej oblicza się na podstawie względnej zmiany napięcia u ze wzoru
(31.18)
Aby wyznaczyd charakterystyki U
2
= f(I
2
) dla stałego napięcia pierwotnego, stałej częstotliwości i
stałego współczynnika mocy, należy obliczyd zmiany napięcia u oraz U
2
przyjmując różne wartości
prądu obciążenia (np. I
2
= (0,25; 0,50; 0,75; 1,00; 1,25)·I
n
) i współczynniki mocy cos
2ind
= 0,8 i
cos
2poj
= 0,8. Wyniki obliczeo zestawid w tabeli 31.4.
Rys. 31.6. Charakterystyki zewnętrzne
149
Tabela 31.4
Lp.
I
2
/I
2n
I
2
u
U
2
cos
2
sin
2
u
R
u
X
U
2n
Uwagi
–
A
–
V
–
–
–
–
V
0,25
0,50
0,75
1,00
1,25
0,8
0,6
obciążenie
indukcyjne
0,25
0,50
0,75
1,00
1,25
0,8
–0,6
obciążenie
pojemnościowe
Na podstawie wyników obliczeo należy wykreślid charakterystyki U
2
= f(I
2
) dla cos
ind
= 0,8 i
cos
poj
= 0,8 przy U
1
= U
n
(rys. 31.6) oraz wyznaczyd zmiennośd napięcia transformatora. Zmiennośd
napięcia jest to spadek napięcia na uzwojeniu wtórnym, występujący przy przejściu od stanu
jałowego do obciążenia znamionowego przy stałym cos
2
, stałym napięciu pierwotnym i stałej
częstotliwości, czyli
(31.19)
3.6
Wyznaczanie sprawności transformatora
Sprawnośd transformatora jest to stosunek mocy czynnej oddawanej do mocy czynnej pobieranej, a
ta ostatnia jest sumą mocy oddawanej i całkowitych strat mocy
(31.20)
Straty całkowite
P
c
są sumą strat obciążeniowych przeliczonych na umowną temperaturę pracy
P
*
obc
oraz strat w rdzeniu
P
Fe
(31.21)
natomiast moc oddawana może byd wyrażona przez znamionową moc pozorną S
n
i wówczas
(31.22)
150
Straty w żelazie
P
Fe
wyznacza się w próbie stanu jałowego dla napięcia znamionowego, natomiast
straty obciążeniowe oblicza się ze wzorów
(31.23)
gdzie:
P
*
obcp
– podstawowe straty mocy,
P
*
obcd
– dodatkowe straty mocy,
P
zn
– moc pobrana w stanie zwarcia przy prądzie I
z
= I
2n
,
T
2
– umowna temperatura pracy [K],
T
1
– temperatura otoczenia, w której wyznaczono P
zn
[K].
Obliczanie sprawności należy przeprowadzid dla dwóch wartości współczynnika mocy cos
2
= 1 i
cos
2ind
= 0,8, przyjmując prąd obciążenia I
2
= (0,25; 0,50; 0,75; 1,00; 1,25)·I
2n
. Wyniki obliczeo
zestawid w tabeli 31.5.
Tabela 31.5
Lp.
I
2
/I
2n
I
2
U
P
Fe
P
zn
P
*
obc
P
c
P
2
cos
2
Uwagi
–
A
V
W
W
W
W
W
–
–
0,25
0,50
0,75
1,00
1,25
1
obciążenie
czynne
0,25
0,50
0,75
1,00
1,25
0,8i
obciążenie
indukcyjne
Na podstawie wyników obliczeo należy wykreślid charakterystyki
,
P
c
= f(I
2
) dla cos
2
= 1 i
cos
2ind
= 0,8 przy U
1
= U
n
i f = f
n
, których orientacyjne przebiegi podano na rysunku 31.7.
Należy również wyznaczyd znamionową sprawnośd transformatora tzn. sprawnośd przy
znamionowym obciążeniu, współczynniku mocy cos
2
= 1 i znamionowej temperaturze pracy
uzwojeo.
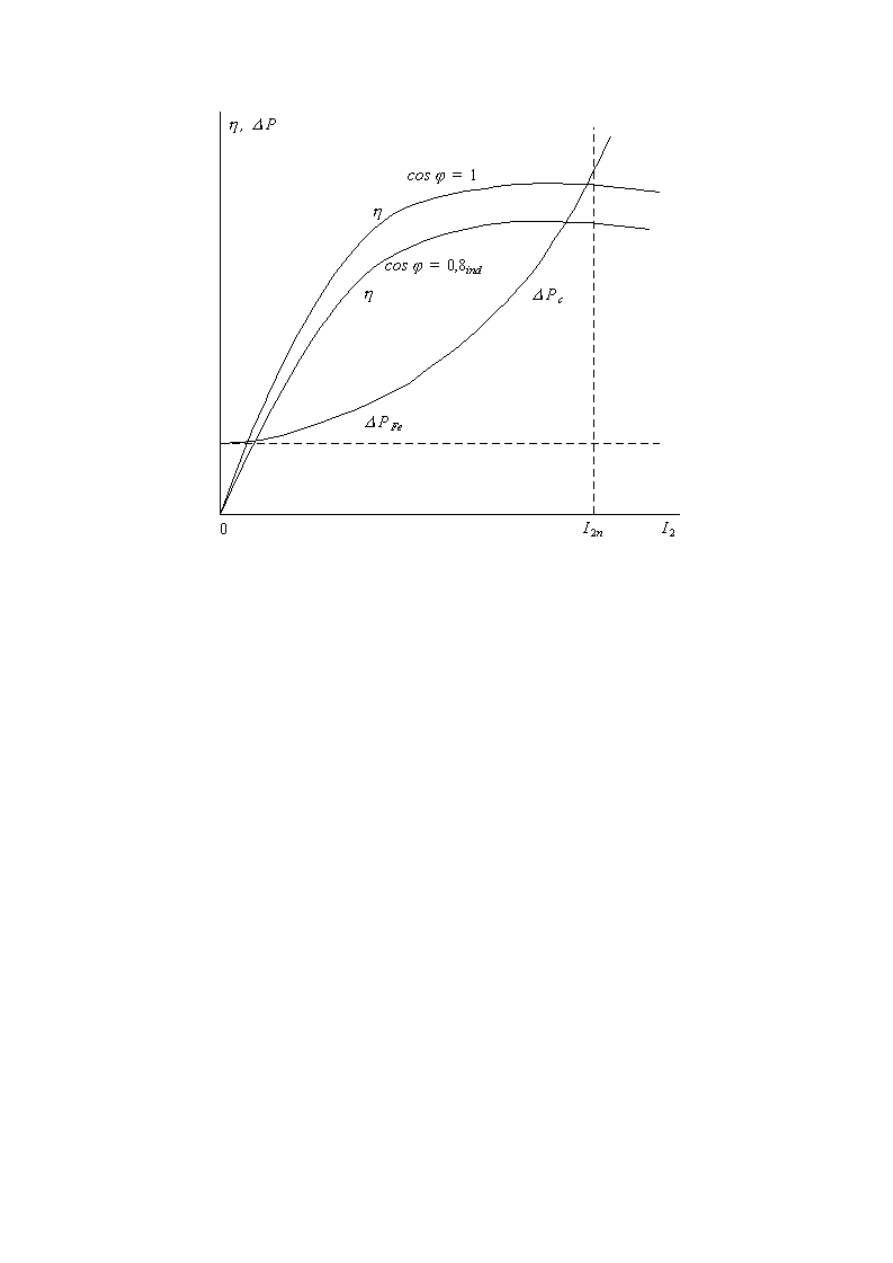
151
Rys, 31.7. Charakterystyki robocze
4
Sprawozdanie z ćwiczenia
Sprawozdanie z dwiczenia powinno zawierad:
protokół z pomiarów,
wykresy charakterystyk stanu jałowego I
0
, P
0
, cos
0
= f(U
01
) przy f = f
n
,
wykresy charakterystyk stanu zwarcia I
z
, P
z
, cos
z
= f(U
z
) przy U
2
= 0 i f = f
n
,
wykresy charakterystyk U
2
= f(I
2
) przy cos
2ind
= 0,8 i cos
2poj
= 0,8 oraz U
1
= U
1n
i f = f
n
,
obliczoną wartośd zmienności napięcia
U,
wykresy sprawności i strat całkowitych
,
P
c
= f(I
2
) dla cos
2
= 1 i cos
2ind
= 0,8 przy U
1
= U
1n
i
f = f
n
,
obliczoną wartośd sprawności znamionowej,
uwagi i wnioski.
5
Pytania kontrolne
Co to jest przekładnia transformatora?
W jaki sposób można określid orientacyjną wartośd napięcia znamionowego transformatora?
Z której strony należy zasilad transformator podczas prób stanu jałowego i zwarcia, i dlaczego?
Uzasadnid przebieg składowej biernej prądu jałowego I
0
w funkcji napięcia U
0
.
Co to jest napięcie zwarcia transformatora?
Podad definicję zmienności napięcia.
Omówid składniki strat mocy transformatora.
Co to jest sprawnośd znamionowa?

152
ĆWICZENIE 32
WSPÓŁPRACA TRANSFORMATORÓW TRÓJFAZOWYCH
1
Program ćwiczenia
Ustalenie początków i kooców uzwojeo transformatorów.
Pomiarowe wyznaczenie grup połączeo.
Pomiar przekładni.
Pomiar napięd zwarcia.
Próba obciążenia współpracujących transformatorów.
2
Cel pomiarów
Współpracą transformatorów lub ich pracą równoległą nazywa się taką pracę, podczas której strony
pierwotne transformatorów zasilane są ze wspólnych szyn, a strony wtórne tych transformatorów
zasilają odbiory również przez wspólne szyny. Koniecznośd równoległego łączenia transformatorów
wynika ze względów eksploatacyjnych, np. gdy moc zapotrzebowana jest większa od mocy
znamionowej transformatorów. Przyczyną mogą byd również duże zmiany obciążenia
transformatorów w zależności od pory doby, roku itp. Zastosowanie kilku współpracujących
transformatorów do zasilania takich odbiorów pozwala na wyłączanie poszczególnych jednostek, gdy
pobór mocy jest mniejszy. Ogranicza się wtedy straty mocy, które w przypadku zasilania odbiorów
niedociążonym pojedynczym transformatorem dużej mocy osiągnęłyby znaczną wartośd.
Do pracy równoległej nie można załączad dowolnych transformatorów. Powinno się je tak dobierad,
by zapewniona była jak najkorzystniejsza współpraca pod względem ekonomicznym i możliwośd
pełnego wykorzystania ich mocy znamionowych.
Celem dwiczenia jest poznanie metod sprawdzania przydatności transformatorów do współpracy
oraz badanie zachowania się transformatorów pracujących równolegle.
3
Omówienie programu ćwiczenia
3.1
Warunki współpracy transformatorów
Współpracę transformatorów można uznad za prawidłową, gdy spełnione są następujące wymagania:
–
w stanie bez obciążenia, w uzwojeniach strony wtórnej nie płyną prądy,
–
współpracujące transformatory są równomiernie obciążone,
–
odpowiednie prądy obciążenia poszczególnych transformatorów są ze sobą w fazie.
Pojawienie się prądów po stronie wtórnej nieobciążonych transformatorów, oznacza przepływ
prądów wyrównawczych i powstanie zbędnych strat mocy w uzwojeniach. Przy obciążeniu takich
transformatorów nie będzie można wykorzystad mocy znamionowych wszystkich współpracujących
transformatorów.
Równomierne obciążenie transformatorów oznacza, że podział mocy na poszczególne transformatory
jest proporcjonalny do ich mocy znamionowych. Gdy wymaganie to nie jest spełnione, wówczas przy
znamionowym obciążeniu jednego transformatora pozostałe mogłyby byd nie w pełni obciążone i
wykorzystanie całej mocy znamionowej zespołu byłoby niemożliwe.

153
Współczynnik mocy współpracujących transformatorów zależy od charakteru odbiorów. Nie oznacza
to jednak, że każdy z transformatorów pracuje przy tym właśnie współczynniku mocy. Współczynnik
mocy każdego z transformatorów zależy także od jego właściwości wewnętrznych. Istnienie
przesunięcia między prądami poszczególnych transformatorów nie jest pożądane, ponieważ łączna
moc zespołu jest wówczas mniejsza niż suma mocy poszczególnych jednostek.
Omówione wymagania będą spełnione, gdy:
a)
przekładnie transformatorów są równe,
b)
grupy połączeo są jednakowe,
c)
zaciski wszystkich transformatorów przyłączone do tych samych szyn są jednoimienne,
d)
napięcia zwarcia transformatorów są równe,
e)
współczynniki mocy w stanie zwarcia poszczególnych transformatorów są równe.
Spełnienie warunków „a, b, c”, eliminuje możliwośd pojawienia się prądów wyrównawczych.
Warunek „d” decyduje o równomiernym obciążaniu się transformatorów, a warunek „e” o równości
faz prądów w odpowiednich uzwojeniach transformatorów.
Normy zezwalają na współpracę transformatorów, których przekładnie nie różnią się więcej niż
0,5%. Gdy dokładnośd ta jest zachowana, prądy wyrównawcze zamykają się w przedziale 2-7%
prądu znamionowego. Napięcia zwarcia mogą się różnid nie więcej niż 10% średniej wartości napięd
zwarcia. Jeżeli do pracy równoległej są przyłączone transformatory o różnych napięciach zwarcia, to
współpraca ich będzie korzystniejsza wówczas, gdy transformator o większej mocy znamionowej
będzie miał mniejsze napięcie zwarcia. Umożliwiłoby to wykorzystanie całkowitej mocy znamionowej
większego transformatora.
Przesunięcie fazowe między prądami transformatorów jest tym większe, im większa jest różnica
współczynników mocy przy zwarciu. Ponieważ wartośd tych współczynników zależy od wielkości
transformatora i dla transformatorów tej samej mocy jest praktycznie taka sama, więc dopuszczalne
przesunięcie fazowe można uzyskad wtedy, gdy stosunek mocy znamionowych jest nie większy niż
3:1.
3.2
Oznaczanie początków i końców uzwojeń
Do oznaczania początków i kooców przyjmuje się, że jednoimiennymi zaciskami są te, do których
prąd wpływając (lub wypływając), wytwarza w rdzeniu transformatora strumienie magnetyczne o
tym samym kierunku. W transformatorach wielofazowych bada się kierunek strumieni w kolumnach.
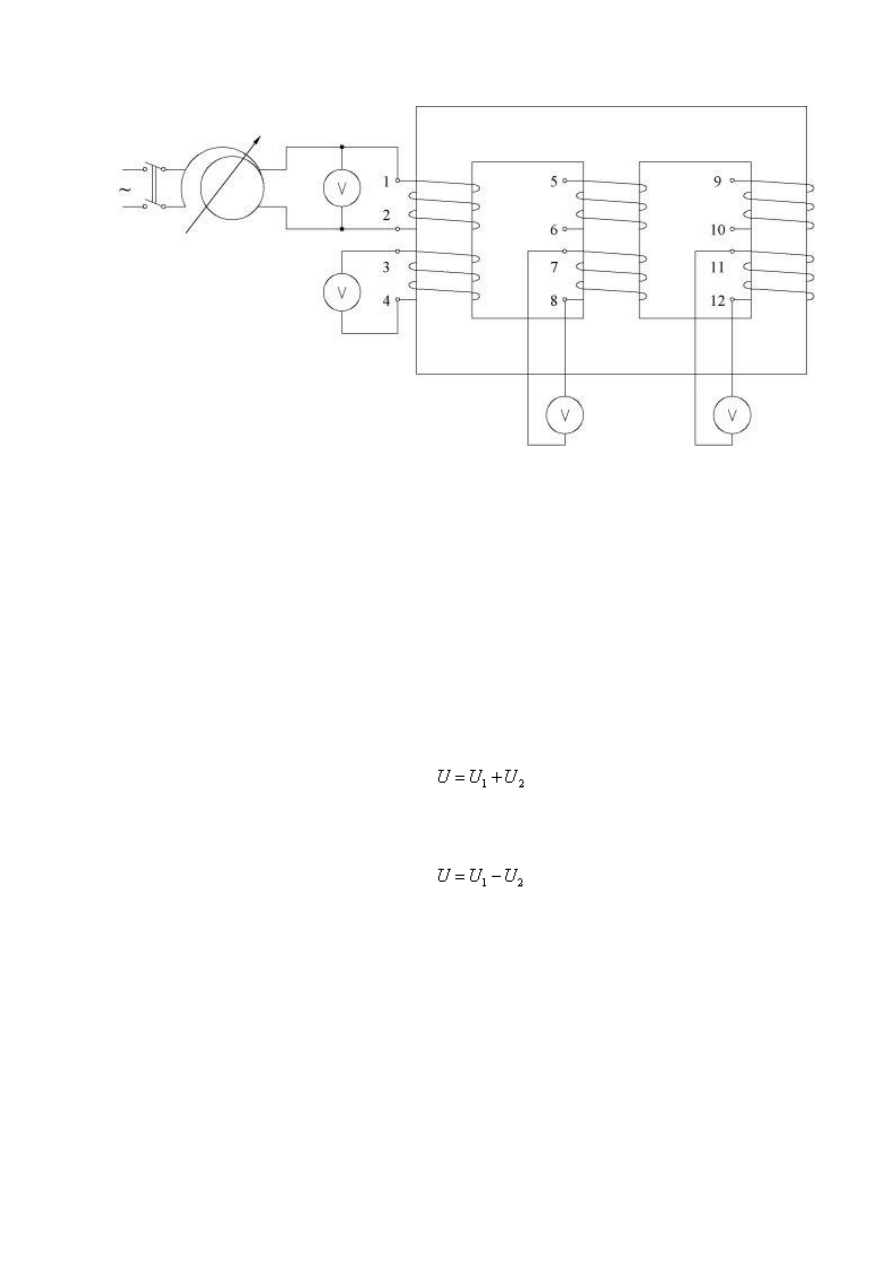
154
Rys. 32.1. Ustalenie uzwojeo nawiniętych na tej samej kolumnie
Przed oznaczeniem początków i kooców uzwojeo należy ustalid, które uzwojenia znajdują się na tych
samych kolumnach rdzenia. W tym celu łączy się układ pomiarowy przedstawiony na rys. 32.1.
Zasilając jedno z uzwojeo pierwotnych, mierzy się napięcia na wszystkich uzwojeniach wtórnych.
Strumieo magnetyczny wytworzony przez uzwojenie zasilane sprzęga się w największym stopniu z
uzwojeniem znajdującym się na tej samej kolumnie co uzwojenie zasilane. Napięcie indukujące się w
tym uzwojeniu jest więc większe od napięd na pozostałych uzwojeniach wtórnych. Powtarzając
pomiar dla każdego z uzwojeo pierwotnych, ustala się pary uzwojeo umieszczonych na tych samych
kolumnach. Po ustaleniu par uzwojeo oznacza się początki i kooce uzwojeo według układu
przedstawionego na rys. 32.2. Dowolny zacisk, np. oznaczony cyfrą 1, przyjmuje się za początek
uzwojenia 1-2. Zacisk 3 będzie początkiem uzwojenia 3-4, jeżeli
(32.1)
lub jego koocem, jeżeli
(32.2)
Zasilając kolejne uzwojenia na innych kolumnach, wyznacza się początki i kooce wszystkich uzwojeo.
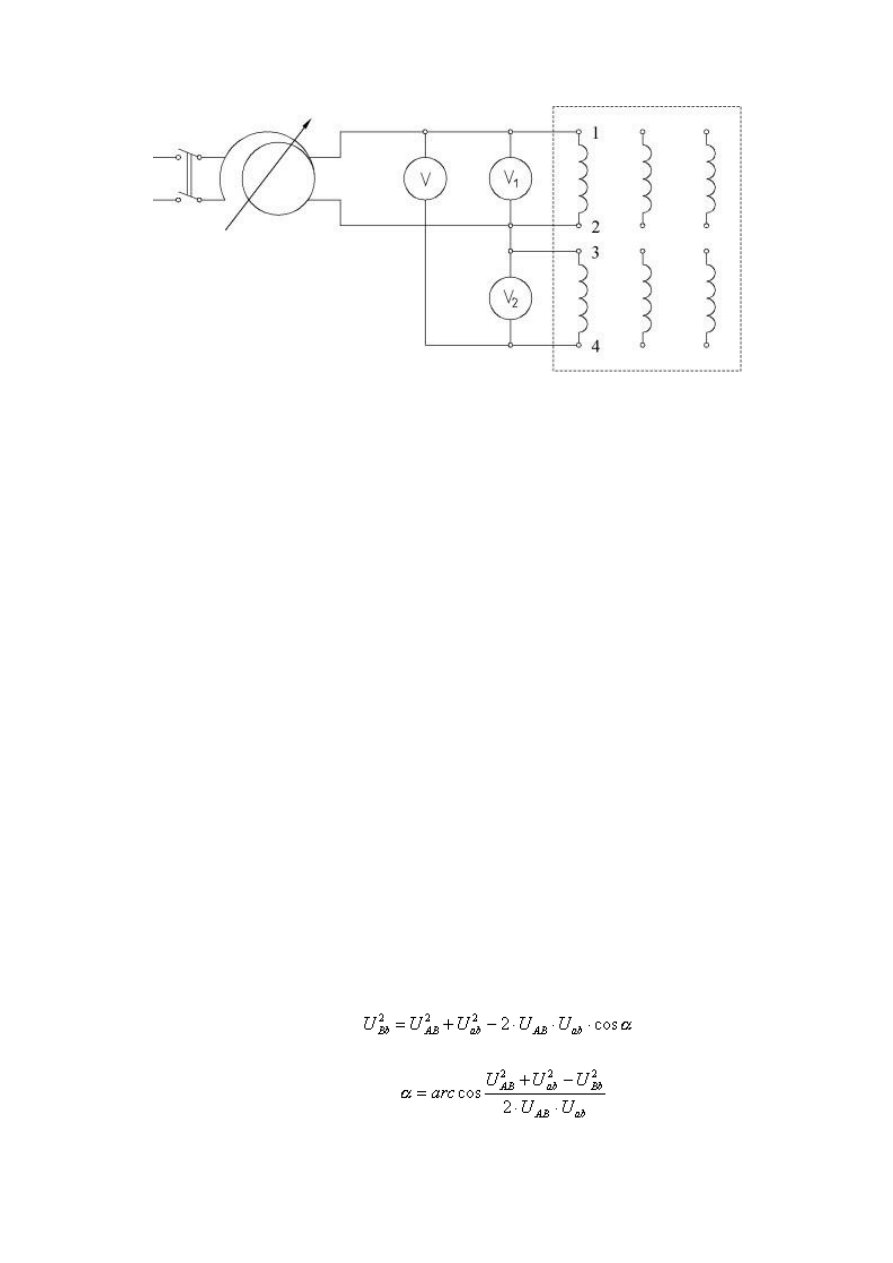
155
Rys. 32.2. Oznaczenie początków i kooców uzwojeo
3.3
Wyznaczanie grupy połączeń
Grupą połączeo transformatora nazywa się przesunięcie kątowe między wektorami odpowiadających
sobie napięd strony górnej i dolnej, wyrażone w godzinach, przy czym 1h odpowiada 30º. W
zależności od sposobu połączenia uzwojeo (gwiazda, trójkąt lub zygzak) po stronie górnej i dolnej
należą transformatory do różnych grup połączeo. Połączenie w gwiazdę po stronie górnej oznaczone
jest przez Y, po dolnej przez y, połączenie w trójkąt odpowiednio przez D i d, połączenie w zygzak
(tylko po dolnej stronie) przez z. Możliwa jest realizacja grup połączeo 0, 1, 2, 4, 5, 6, 7, 8, 10, 11. W
zależności od grupy połączeo transformatory wykazują różne właściwości i różną przydatnośd do
różnych warunków eksploatacyjnych. Tylko niektóre grupy połączeo umożliwiają prawidłową pracę
równoległą. W Polsce zalecane są grupy Yy0, Dy5, Yd5, Yz5, Dy11, Yd11, Yz11. Przykład połączenia
uzwojeo transformatora pokazano na rys. 32.3 (grupa Yd11).
Grupę połączeo można określid na podstawie schematu połączeo, gdy znane są początki i kooce
uzwojeo, lub metodami pomiarowymi. Gdy dostępne są tylko zaciski główne transformatora,
ustalenie grupy możliwe jest jedynie przez pomiar. Najbardziej rozpowszechnioną metodą
pomiarową jest pomiar napięd w układzie przedstawionym na rys. 32.4. Obniżonym napięciem
trójfazowym zasila się transformator, którego uzwojenia dolnego i górnego napięcia są połączone w
jednej z faz (na rys. 32.4 - faza A). Po zmierzeniu napięd obu stron U
AB
i U
ab
oraz napięcia U
Bb
, można
graficznie lub obliczeniowo wyznaczyd grupy połączeo. Wykreślając, w przyjętej skali, najpierw
odcinek długości U
AB
, a następnie kreśląc z jego kooców łuki o promieniach U
ab
i U
Bb
, wyznacza się
punkt b (rys. 32.4). Trójkąt ABb wyznacza kąt
, który określa grupę połączeo. Do wyznaczenia grupy
połączeo można użyd również napięd U
AC
, U
ac
i U
Cc
. Trójkąt ABb wskazuje również w jaki sposób
można obliczyd kąt . Z twierdzenia kosinusów
(32.3)
więc
(32.4)
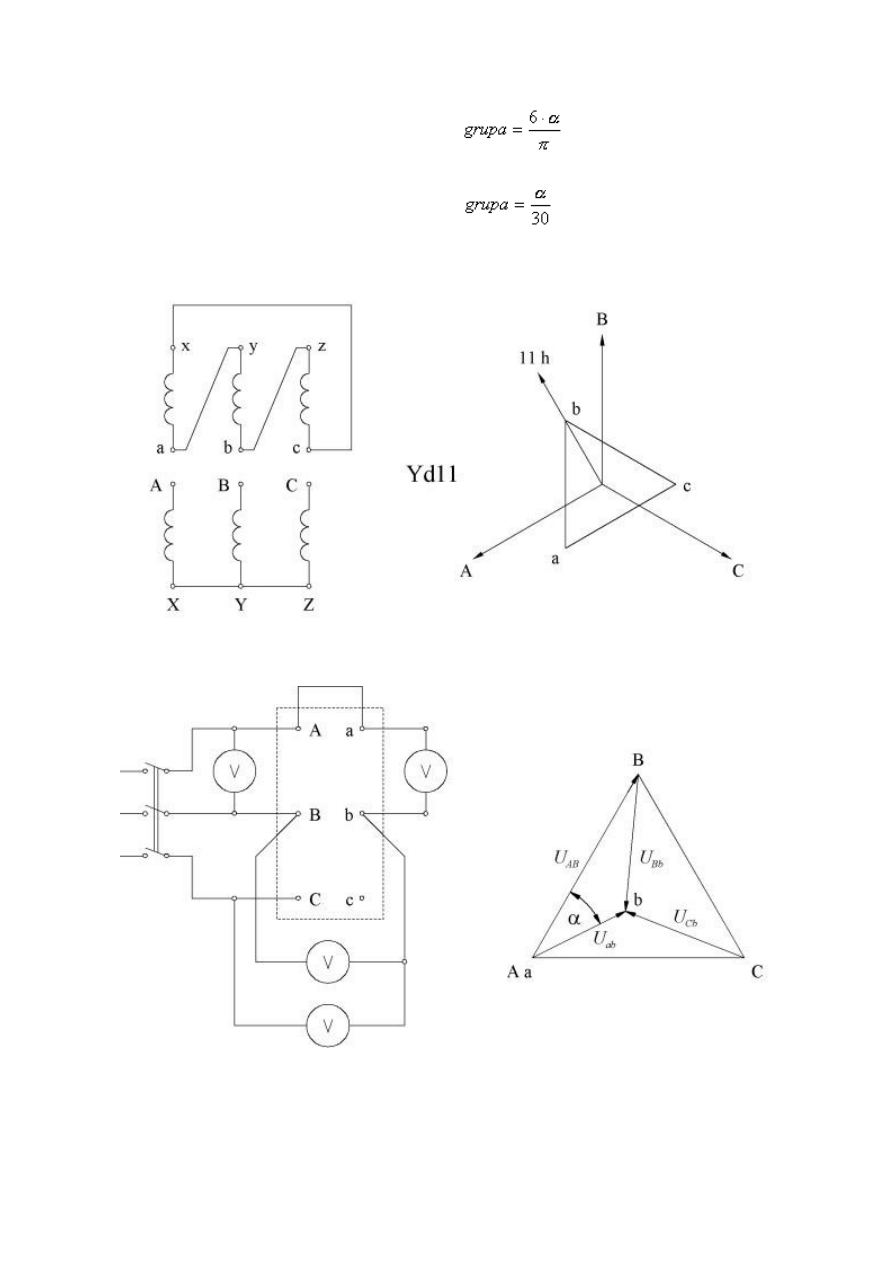
156
i dalej
(32.5)
jeżeli
wyrażona jest w radianach lub
(32.6)
jeżeli
wyrażona jest w stopniach.
Rys. 32.3. Przykład grupy połączeo
Rys. 32.4. Wyznaczanie grupy połączeo
157
3.4
Pomiar przekładni transformatorów
Pomiary przekładni transformatorów należy wykonad w sposób opisany w dwiczeniu 31. Zmierzone
wartości przekładni obu transformatorów należy porównad ze sobą, biorąc pod uwagę, że
przekładnie nie mogą się różnid więcej niż 0,5% wartości przekładni znamionowej albo 0,1 wartości
względnej napięcia zwarcia, przy czym obowiązuje wartośd mniejsza.
3.5
Pomiary napięć zwarcia transformatorów
Napięcie zwarcia należy zmierzyd dla obu transformatorów, w sposób opisany w dwiczeniu 31,
ograniczając pomiary do jednego punktu I
z
= I
n
. Następnie należy obliczyd średnią wartośd napięcia
zwarcia i z tą wartością porównad napięcia zwarcia poszczególnych transformatorów. Należy
uwzględnid to, że różnice nie mogą przekraczad 10%.
3.6
Próba obciążenia współpracujących transformatorów
Wyznaczenie grup połączeo, przekładni i napięd zwarcia pozwala zdecydowad, czy transformatory
nadają się do współpracy. Jeżeli warunki pracy równoległej są spełnione, łączy się transformatory
według schematu przedstawionego na rys. 32.5. Warunek połączenia jednoimiennych zacisków obu
transformatorów do tych samych szyn zbiorczych sprawdza się przez pomiar napięd woltomierzami
V
1
i V
2
. Po załączeniu wyłączników W
1
, W
2
i W
3
należy zmierzyd napięcia na wyłączniku W
4
. Jeżeli
woltomierze V
1
i V
2
nie wychylają się, można załączyd wyłącznik W
4
. Wystąpienie napięcia na
wyłączniku W
4
oznacza, że połączenie jest błędne i wówczas po wyłączeniu transformatorów należy
zamienid dwa dowolne przewody na wyłączniku W
4
i ponownie wykonad pomiar. Po załączeniu
wyłącznika W
4
należy odczytad wskazania amperomierzy po stronie wtórnej (jeżeli są różne od zera).
Następnie wyłącznikiem W załącza się obciążenie, którym w dwiczeniu jest trójfazowy opornik
wodny. Zmieniając wartośd obciążenia, mierzy się prądy stron wtórnych obu transformatorów oraz
całkowity prąd obciążenia. Podczas pomiarów należy zwracad uwagę, by prąd któregokolwiek
transformatora nie przekroczył 1,25·I
n
. Wyniki pomiarów należy zestawid w tabeli 32.1.
Tabela 32.1
Lp.
U
1
U
2
Transformator I Transformator II
Obciążenie
Uwagi
I
a
I
b
I
c
I
2I
I
a
I
b
I
c
I
2II
I
a
I
b
I
c
I
obc
V
V
A
A
A
A
A
A
A
A
A
A
A
A
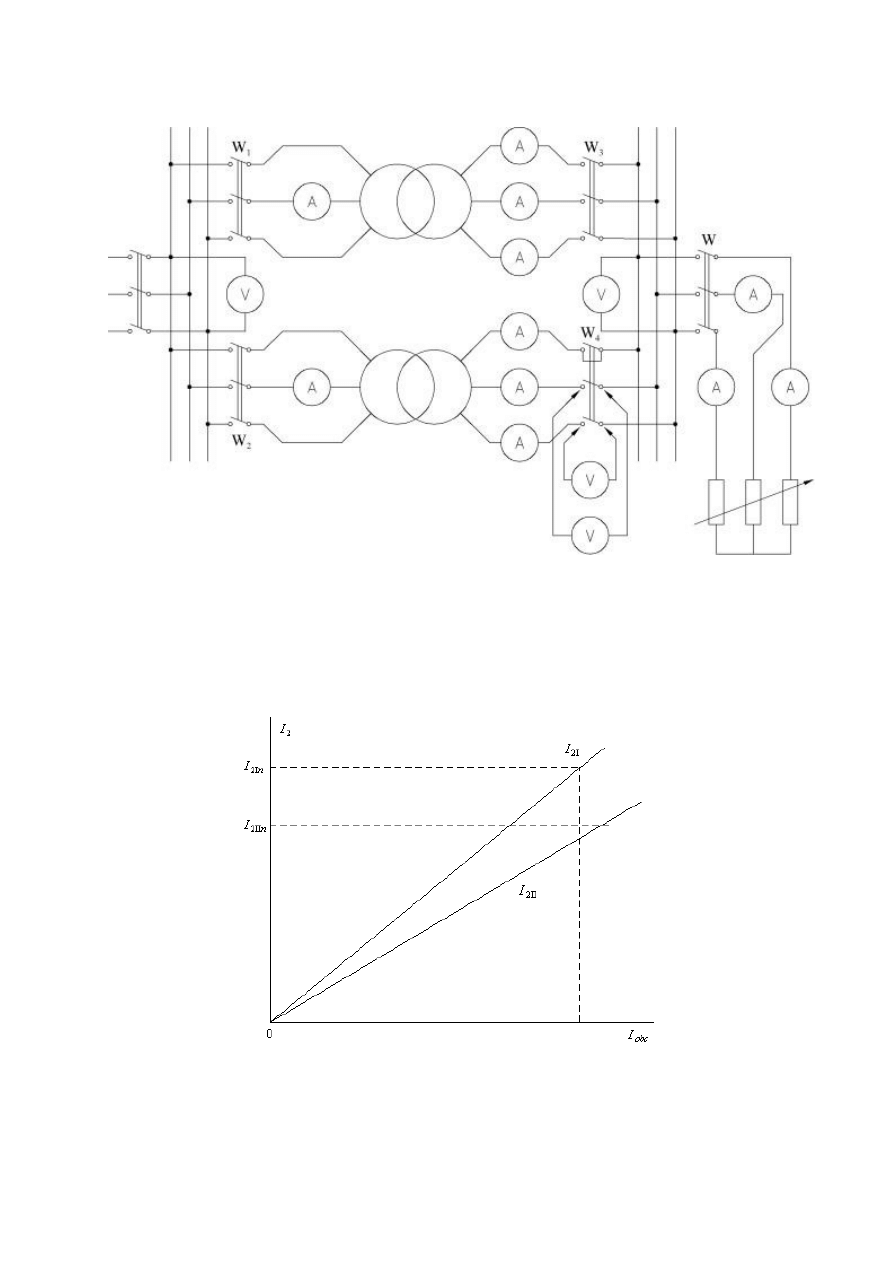
158
Rys. 32.5. Układ do badania rozkładu obciążeo przy współpracy transformatorów
Na podstawie wyników pomiarów należy wykreślid zależności I
2I
i I
2II
od prądu obciążenia I
obc
, przy
stałym napięciu U
1
= U
1n
i f = f
n
. Przykładowe przebiegi takich charakterystyk pokazano na rysunku
32.6. Na charakterystykach należy zaznaczyd prądy znamionowe obu transformatorów i stwierdzid,
czy odpowiadający im prąd obciążenia jest równy sumie prądów znamionowych.
Rys. 32.6. Rozkład obciążeo współpracujących transformatorów

159
4
Sprawozdanie z ćwiczenia
Sprawozdanie z dwiczenia powinno zawierad:
protokół z pomiarów,
graficzne wyznaczenie grupy połączeo,
sprawdzenie warunków pracy równoległej,
wykresy rozpływu prądów obciążenia przy pracy równoległej I
2I
, I
2II
= f(I
obc
) przy U
1
= U
n
,
uwagi i wnioski.
5
Pytania kontrolne
Co to jest praca równoległa transformatorów?
Wymienid warunki pracy równoległej.
Jakie przyczyny mogą wywoład przepływ prądów wyrównawczych?
Podad dopuszczalne odchyłki przekładni i napięd zwarcia transformatorów przeznaczonych do
pracy równoległej.
Od czego zależy przesunięcie fazowe prądów współpracujących transformatorów?
Wymienid zalecane grupy połączeo transformatorów.
Jak zapewnia się równomiernośd obciążenia współpracujących transformatorów?

160
ĆWICZENIE 33
WYZNACZENIE CHARAKTERYSTYK ELEKTROMECHANICZNYCH SILNIKA
INDUKCYJNEGO METODĄ STRAT POSZCZEGÓLNYCH
1
Program ćwiczenia
Pomiar rezystancji uzwojeo.
Pomiar charakterystyk biegu jałowego i rozdział strat jałowych.
Wyznaczenie charakterystyk stanu zwarcia i obliczenie znamionowego prądu zwarcia.
Pomiar charakterystyki I = f(P
1
) przy obciążeniu bezpośrednim.
Obliczenie charakterystyk elektromechanicznych.
2
Cel pomiarów
Dwiczenie ma na celu zapoznanie z metodą wyznaczania charakterystyk elektromechanicznych
silników indukcyjnych bez konieczności używania do tego celu wyskalowanych urządzeo
hamulcowych. Jest to metoda pośrednia, tzw. metoda strat poszczególnych.
Występujące w maszynach indukcyjnych straty mocy można podzielid na straty jałowe i straty
obciążeniowe. Straty jałowe wyznacza się doświadczalnie podczas pracy silnikowej. Aby wyznaczyd
straty obciążeniowe należy znad zależnośd między prądem pobieranym przez silnik a jego mocą.
Ponieważ dla silników indukcyjnych zależności tej nie można wyznaczyd analitycznie, niezbędne jest
przeprowadzenie pomiarów podczas obciążenia bezpośredniego. Obciążeniem silnika może byd w
tym przypadku dowolne urządzenie zapewniające jedynie możliwośd regulacji mocy pobieranej z
silnika; może to byd np. maszyna robocza, do napędu której silnik jest używany. Przedstawiona
metoda pozwala więc na wyznaczenie sprawności i charakterystyk elektromechanicznych silnika
bezpośrednio na stanowisku pracy. Jest to istotna zaleta tej metody. Przeprowadzone w trakcie
dwiczenia pomiary stanu zwarcia badanego silnika pozwolą na określenie charakterystycznych
parametrów silnika, między innymi krotności prądu rozruchowego i krotności momentu
rozruchowego. Wyniki obliczeo charakterystyk elektromechanicznych umożliwiają porównanie
parametrów badanej maszyny z podanymi przez wytwórcę na tabliczce znamionowej.
161
3
Omówienie programu ćwiczenia
3.1
Pomiar rezystancji uzwojeń
Pomiar rezystancji uzwojeo należy przeprowadzid metodą techniczną, a otrzymane wyniki zestawid w
tabeli 33.1.
Tabela 33.1
Lp.
Faza U
Faza V
Faza W
R
śr
R
*
śr
Uwagi
U
I
R
U
U
I
R
V
U
I
R
W
V
A
V
A
V
A
W tabeli R
*
jest rezystancją fazy przeliczoną na umowną temperaturę pracy (rozdz. 2).
Jeżeli uzwojenie połączone jest na stałe w trójkąt lub punkt gwiazdowy nie jest wyprowadzony,
rezystancje faz należy obliczyd według zależności (33.1).
Rezystancje faz uzwojenia połączonego w gwiazdę wynoszą
(33.1)
Jeżeli rezystancje między zaciskami są sobie równe
(33.2)
to rezystancja fazy jest określona zależnością
(33.3)
Dla uzwojenia połączonego w trójkąt rezystancje faz wynoszą
162
(33.4)
Jeżeli
(33.5)
to
(33.6)
3.2
Pomiary podczas biegu jałowego
Pomiary przeprowadzone podczas biegu jałowego silnika pozwalają m.in. na wyznaczenie strat
mechanicznych oraz strat w żelazie silnika. Układ połączeo przedstawiono na rysunku 33.1.
Nieobciążony silnik należy zasilid napięciem regulowanym zmniejszając jego wartośd od U = 1,2·U
n
do
takiej wartości, przy której prąd pobierany przez silnik zaczyna rosnąd (U 0,3·U
n
) lub jego prędkośd
obrotowa wyraźnie zmaleje. Otrzymane wyniki należy zestawid w tabeli 33.2.
Tabela 33.2.
Lp.
U
0śr
I
0śr
P
0
cos
0
P
obc0
P
0
U
0
2
I
I
0w
Uwagi
P
I
P
II
P
V
A
W
–
W
V
2
A
P
m
=
P
Fen
=
W tabeli 33.2 współczynnik mocy biegu jałowego
(33.7)
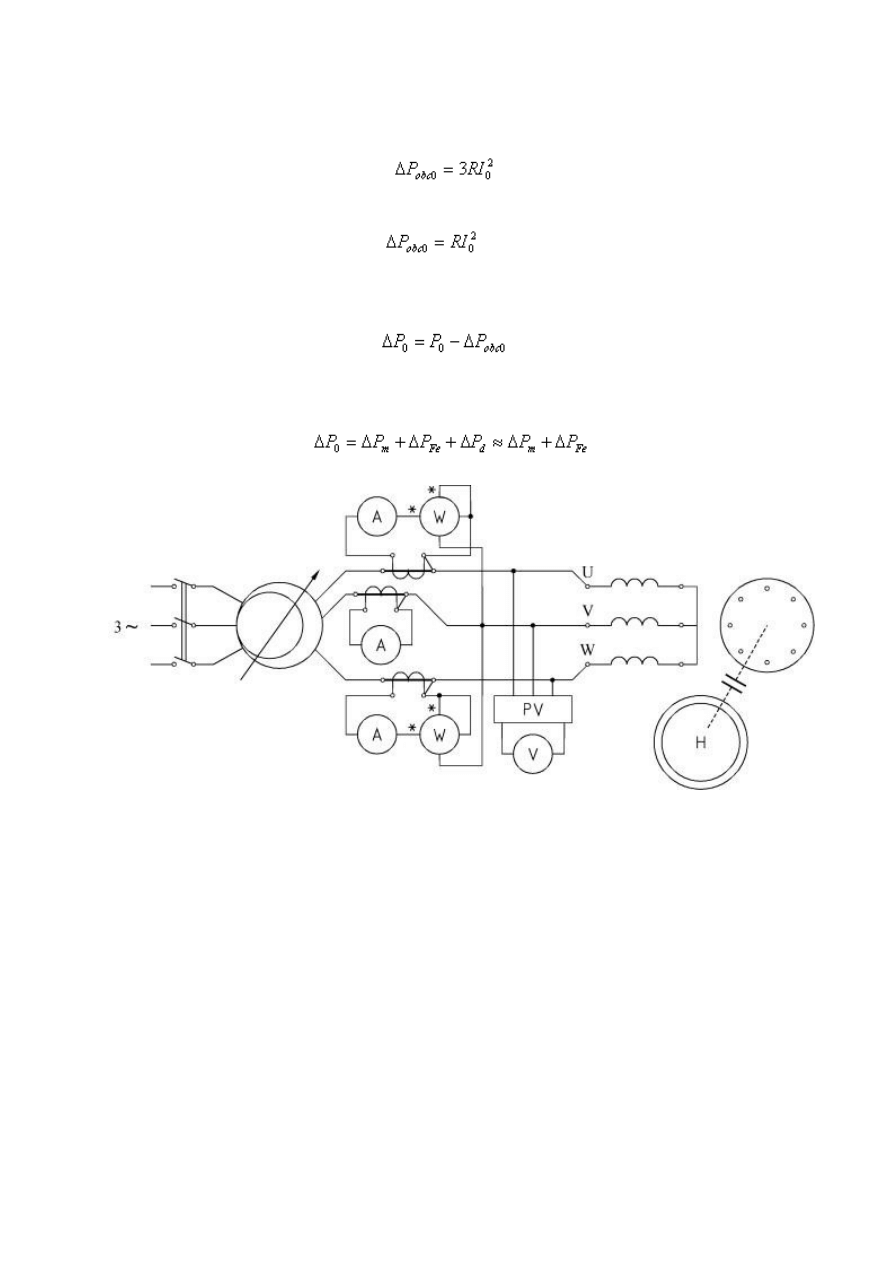
163
straty obciążeniowe biegu jałowego
a)
przy uzwojeniu połączonym w gwiazdę
(33.8)
b)
przy uzwojeniu połączonym w trójkąt
(33.9)
straty jałowe
(33.10)
Straty jałowe w przybliżeniu są równe sumie strat mechanicznych i strat w stalowym rdzeniu
(33.11)
Rys. 33.1. Układ połączeo silnika indukcyjnego klatkowego do próby biegu jałowego, stanu zwarcia
i obciążenia
Na podstawie przeprowadzonych pomiarów wykreśla się charakterystyki biegu jałowego, składowe
bierną i czynną prądu I
0
w funkcji napięcia oraz rozdziela straty na straty mechaniczne i straty w
żelazie.
Przykładowe charakterystyki biegu jałowego, tj. zależności cos
0
, I
0
, P
0
= f(U
0
) przy f = f
n
oraz
przebiegi I
, I
0w
= f(U
0
), przedstawiono na rysunku 33.2.
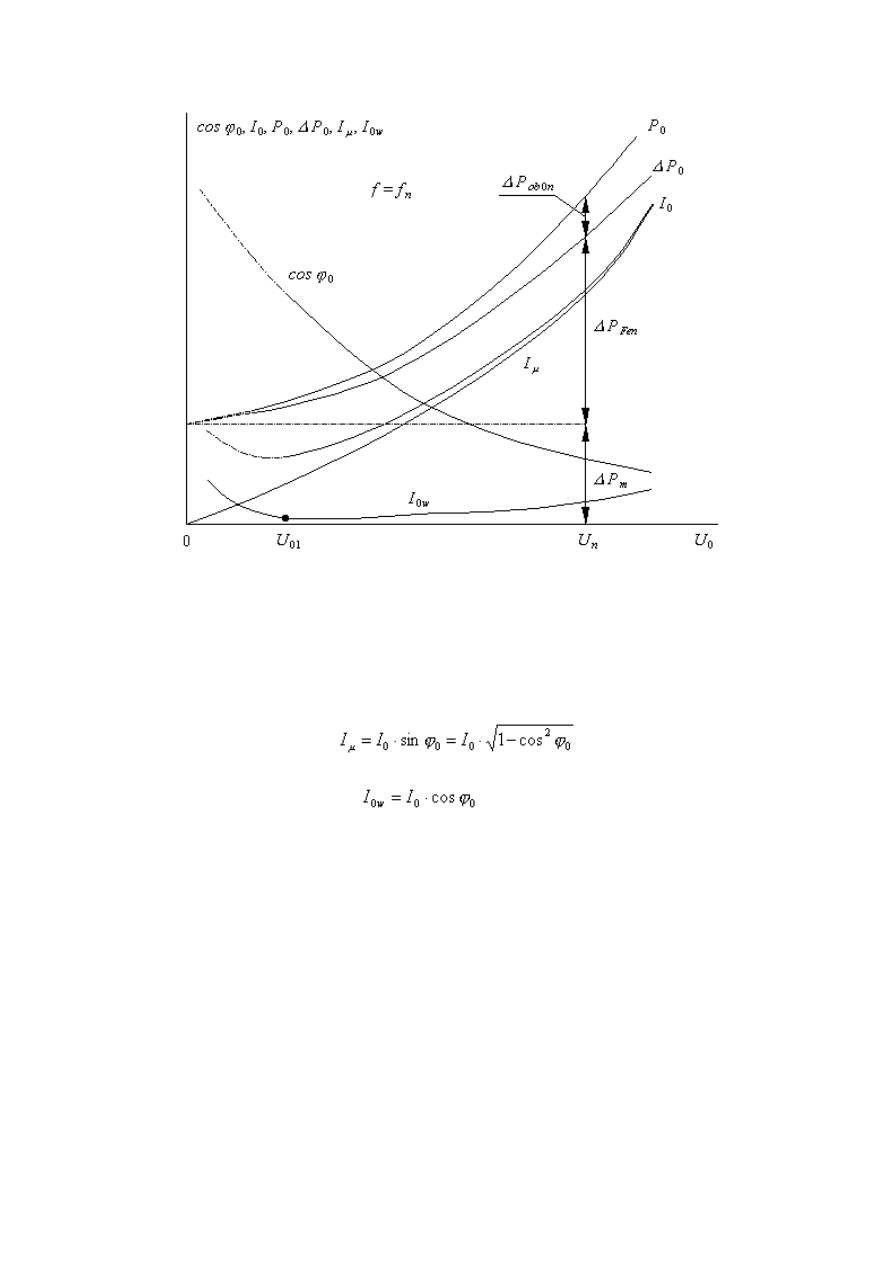
164
Rys. 33.2. Charakterystyki biegu jałowego silnika indukcyjnego
Prąd biegu jałowego I
0
ma dwie składowe: składową bierną I
, (tzw. prąd magnesujący), której
przebieg jest taki jak prądu magnesującego rdzenia ze szczeliną powietrzną, oraz składową czynną I
0w
.
Składowe prądu biegu jałowego oblicza się z zależności
(33.12)
(33.13)
Składowa bierna I
ma przy małych napięciach przebieg prostoliniowy wynikający z istniejącej w
silniku szczeliny powietrznej; przy wyższych napięciach (U 0,6·U
n
) uwidacznia się nasycenie rdzenia
magnetycznego. Od napięcia U 0,8·U
n
przebieg I
prawie pokrywa się z przebiegiem I
0
= f(U
0
).
Składowa czynna I
0w
ma minimum przy pewnej wartości napięcia U
0
= U
01
. Gwałtowny wzrost
składowej I
0w
przy napięciu U U
01
wynika z faktu, iż przy małych wartościach napięcia większośd
strat P
0
stanowią straty mechaniczne, niezależne od napięcia. Przy napięciu U U
01
decydującą rolę
odgrywają straty mocy w rdzeniu, zwiększające się z kwadratem napięcia.
Przebieg prądu I
0
wynika z przebiegu jego składowych I
i I
0w
. Ze wzrostem napięcia od U
01
składowa
bierna I
rośnie szybko a składowa czynna liniowo w funkcji napięcia. Stąd współczynnik mocy maleje
ze wzrostem napięcia, nawet do cos
0n
0,1 przy napięciu znamionowym.
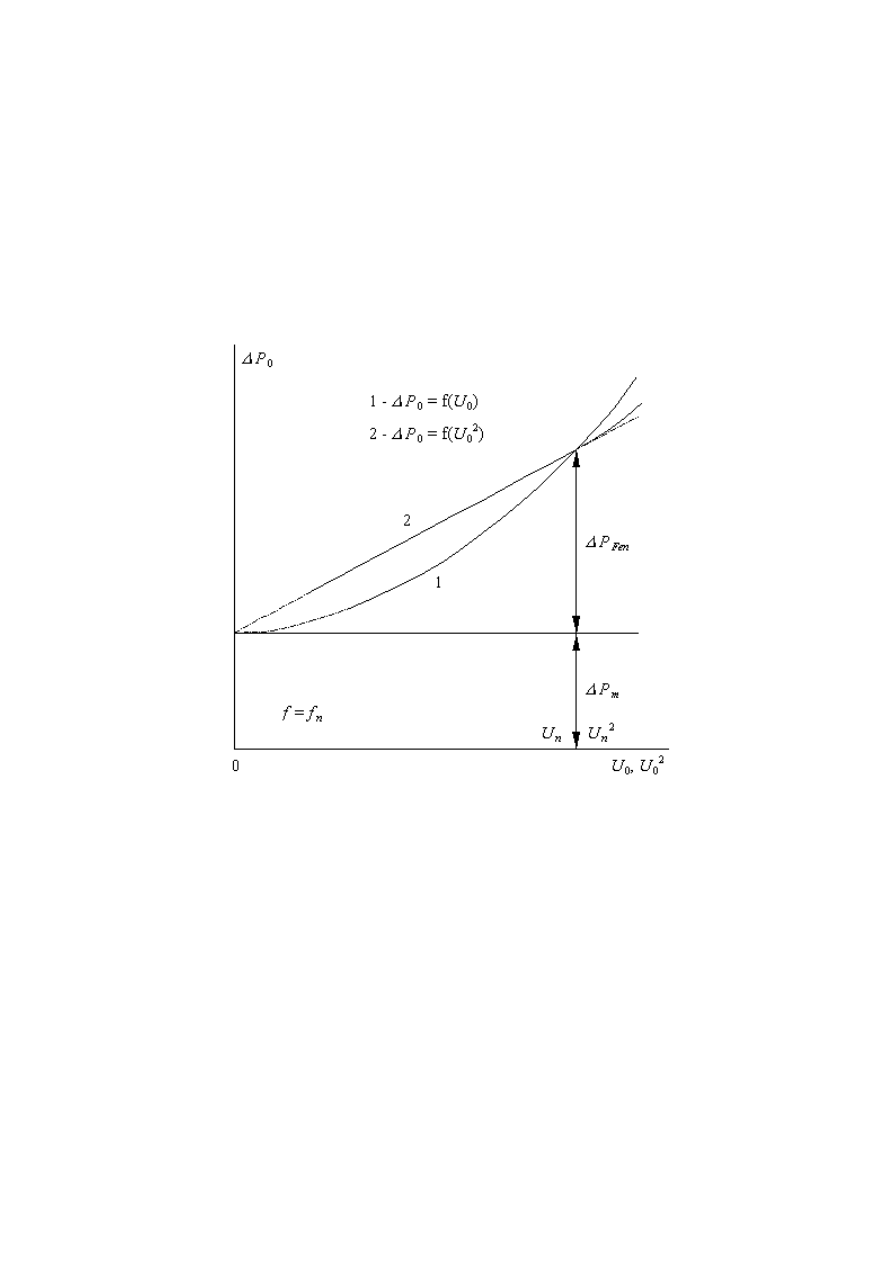
165
Prędkośd obrotowa w czasie pomiarów stanu jałowego praktycznie nie zmienia się, a więc straty
mechaniczne silnika są stałe. Straty w rdzeniu są proporcjonalne do kwadratu napięcia. Krzywa
P
0
jest parabolą odcinającą na osi rzędnych wartośd strat mechanicznych. Wyznaczenie strat
mechanicznych przez przedłużenie krzywej strat jałowych do osi rzędnych (rys. 33.3) jest mało
dokładne. Aby rozdzielid straty jałowe, należy wykreślid zależnośd
P
0
= f(U
0
2
) mającą w przybliżeniu
przebieg prostoliniowy. Punkt przecięcia prostej
P
0
= f(U
0
2
) z osią rzędnych wyznacza wartośd strat
mechanicznych. Przy dużych nasyceniach obwodu magnetycznego straty w rdzeniu zależą od napięcia
w potędze wyższej niż druga, stąd przebieg
P
0
= f(U
0
2
) dla wyższych napięd może zaginad się ku
górze.
Rys. 33.3. Zależnośd strat jałowych od napięcia
3.3
Pomiary podczas stanu zwarcia
Pomiary przeprowadzone podczas stanu zwarcia silnika pozwalają m.in. na obliczenie krotności prądu
i momentu rozruchowego. Układ połączeo jest taki sam jak przy pomiarach stanu jałowego (rys.
33.1), ale wirnik badanej maszyny należy unieruchomid. Aby zmniejszyd wpływ nagrzewania się
uzwojeo na otrzymane wyniki pomiary należy przeprowadzid możliwie szybko, zmniejszając natężenie
prądu od I = 1,2·I
n
do zera. Ponieważ wielkości zmierzone podczas zwarcia zależą od wzajemnego
położenia wirnika i stojana (ze zmianą położenia zmienia się przewodnośd strefy zębowej), pomiary
przy każdej wartości napięcia należy przeprowadzid przy trzech położeniach wirnika, przyjmując do
wykreślenia charakterystyk i obliczeo wartości średnie. Wyniki pomiarów należy zestawid w tabeli
33.3.
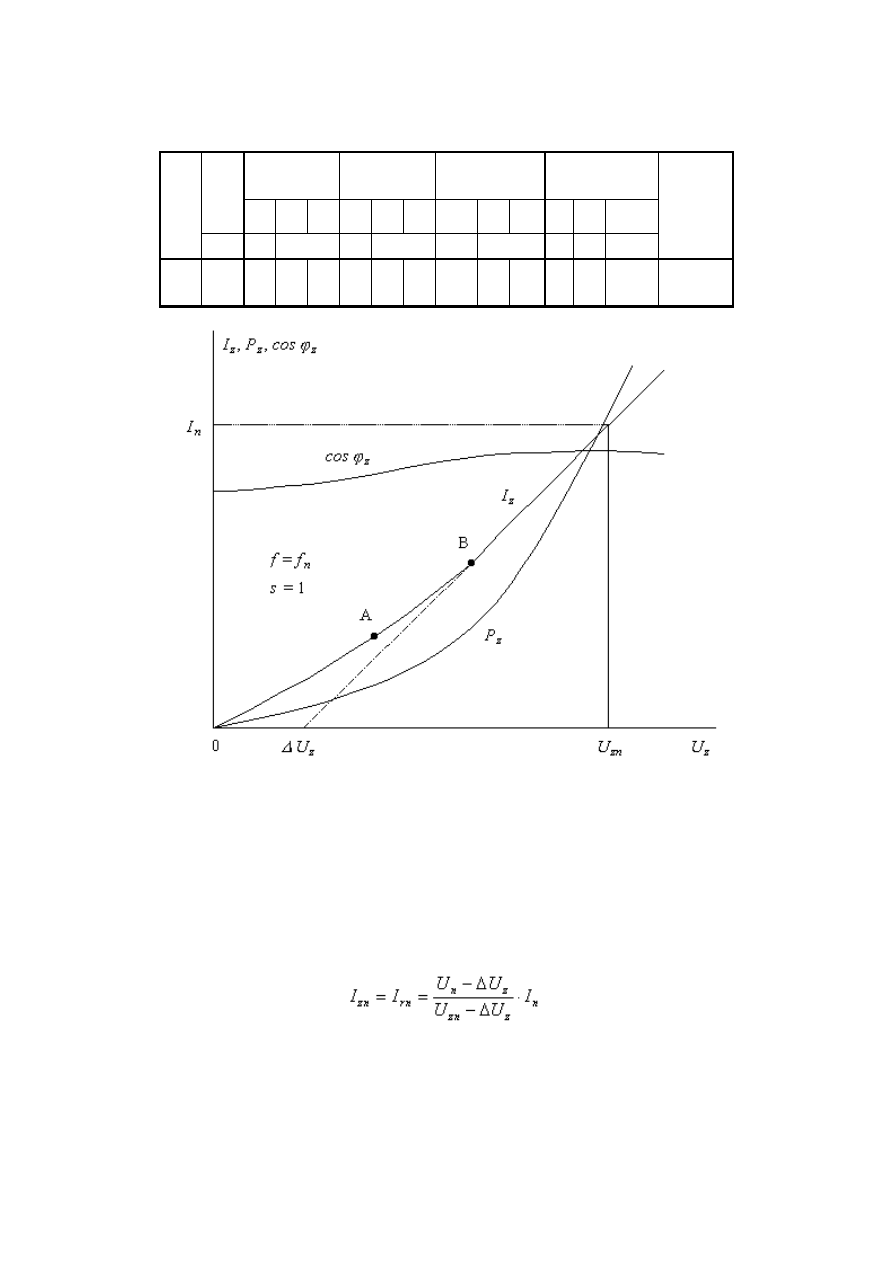
166
Tabela 33.3
Lp.
U
zśr
I położenie
wirnika
II położenie
wirnika
III położenie
wirnika
Wartości
średnie
Uwagi
I
Iśr
P
I
P
II
I
IIśr
P
I
P
II
I
IIIśr
P
I
P
II
I
z
P
z
cos
z
V
A
W
A
W
A
W
A W
–
n = 0
Rys. 33.4. Charakterystyki stanu zwarcia silnika indukcyjnego
Na podstawie przeprowadzonych pomiarów należy wykreślid charakterystyki zwarcia, tj. zależności
cos
z
, I
z
, P
z
= f(U
z
) przy f = f
n
, s = 1, których przykładowe przebiegi przedstawiono na rysunku 33.4.
Przybliżoną wartośd znamionowego prądu zwarcia (prądu rozruchowego przy U = U
n
) obliczyd należy
z zależności
(33.14)
gdzie: U
zn
- napięcie, przy którym prąd zwarcia jest równy prądowi znamionowemu zasilanego
uzwojenia, natomiast U
z
– wartośd wynikająca z aproksymacji prostoliniowej części charakterystyki
prądu zwarcia (rys. 33.4).
167
Paraboliczny przebieg P
z
= f(U
z
) (rys. 33.4) wynika z faktu, iż moc w stanie zwarcia jest tracona na
rezystancjach uzwojeo stojana i wirnika. Napięcie zasilające, a więc i indukcja są małe, czyli pomijalne
są straty w rdzeniu, a straty mechaniczne nie występują. Straty w uzwojeniach są proporcjonalne do
kwadratu prądu a zatem, przy prawie liniowej zależności I
z
= f(U
z
), i do kwadratu napięcia.
Na podstawie pomiarów stanu zwarcia należy wyznaczyd krotnośd znamionowego prądu zwarcia
(33.15)
Znamionowa moc zwarcia, tj. moc zwarcia, gdy U = U
n
, wynosi
(33.16)
gdzie: P
z1
– moc zwarcia, gdy I
z
= I
n
.
Moment obrotowy w stanie zwarcia M
zn
, gdy napięcie U = U
n
, oblicza się określając straty
obciążeniowe w wirniku
P
0b2
, które dla znamionowego prądu zwarcia w przybliżeniu wynoszą
(33.17)
Straty obciążeniowe podstawowe stojana w stanie zwarcia, gdy uzwojenie jest połączone w gwiazdę,
oblicza się z zależności
(33.18)
W stanie zwarcia straty w rdzeniu występują zarówno w stojanie jak i w wirniku, natomiast podczas
biegu jałowego tylko w stojanie. Jednocześnie dla U = U
n
indukcja w stanie zwarcia jest równa w
przybliżeniu połowie indukcji podczas biegu jałowego przy U = U
n
. Dlatego we wzorze 33.17 straty w
rdzeniu
P
Fen
wyznaczone z charakterystyki biegu jałowego dla U = U
n
są podzielone przez 2.
Moment obrotowy w stanie zwarcia przy U = U
n
oblicza się z zależności
(33.19)
Krotnośd momentu rozruchowego wynosi
(33.20)
168
Otrzymane wyniki należy zestawid w tabeli 33.4.
Tabela 33.4
I
zn
k
I
P
zn
P
ob1zn
P
Fen
P
ob2zn
M
r
k
M
A
–
W
N·m
–
3.4
Pomiar podczas obciążenia bezpośredniego
Pomiary podczas obciążenia silnika wykonuje się w celu wyznaczenia zależności miedzy prądem
dopływającym do silnika a mocą dostarczaną I = f(P
1
). Zależności tej nie można określid analitycznie
ponieważ współczynnik mocy cos zmienia się wraz ze zmianą obciążenia.
Silnik należy połączyd zgodnie z układem połączeo przedstawionym na rysunku 33.1. Obciążenie
silnika zasilanego napięciem znamionowym U = U
n
należy zmniejszad od obciążenia, przy którym
I = 1,2·I
n
do biegu jałowego. Wyniki pomiarów prądu I, mocy pobieranej P
1
oraz poślizgu s należy
zestawid w tabeli 33.5.
Tabela 33.5
Lp.
U
I
P
1
s
cos
P
ob1
Uwagi
U
AB
U
BC
U
CA
U
śr
I
A
I
B
I
C
I
śr
P
I
P
II
P t x s
V
A
W
–
–
W
R
1
*
=
W tabeli 33.6 współczynnik mocy
(33.21)
straty obciążeniowe uzwojenia stojana wynoszą
–
przy połączeniu w gwiazdę
(33.22)
–
przy połączeniu w trójkąt
(33.23)
169
3.5
Obliczanie charakterystyk elektromechanicznych
Moc elektromagnetyczną pola wirującego określa zależnośd
(33.24)
w której przyjęto, ze całkowite straty w żelazie są równe stratom w żelazie stojana. Założenie to jest
uzasadnione, ponieważ nawet przy obciążeniu znamionowym częstotliwośd prądu wirnika (f
2
= s·f
1
)
jest mała, w związku z czym udział strat w żelazie wirnika jest pomijalnie mały w stosunku do
całkowitych strat w żelazie. Należy przyjąd, że straty w żelazie
P
Fen
oraz straty mechaniczne
P
m
nie
zależą od obciążenia i określid je na podstawie pomiarów biegu jałowego dla napięcia U = U
n
.
Straty dodatkowe w uzwojeniu stojana P
d1
wynikające z nierównomiernego rozkładu gęstości prądu
w przekroju przewodu określa się z zależności
(33.25)
Podczas normalnej pracy silnika indukcyjnego straty dodatkowe w wirniku, ze względu na bardzo
małą częstotliwośd jego prądów, praktycznie nie występują. Można więc przyjąd, że całkowite straty
wirnika są równe stratom obciążeniowym wirnika. Straty obciążeniowe wirnika silnika
pierścieniowego można obliczyd analogicznie do strat obciążeniowych stojana (zależnośd (33.22) lub
(33.23)), natomiast straty obciążeniowe wirnika silnika klatkowego oblicza się z zależności
(33.33)
Moc użyteczna na wale silnika wynosi
(33.37)
Sprawnośd silnika określa zależnośd
(33.38)
Moment obrotowy na wale silnika oblicza się z zależności
(33.39)
gdzie:
1
– prędkośd kątowa wirującego pola magnetycznego.
170
Obliczenia należy przeprowadzid dla punktów pracy wyznaczonych przy obciążeniu bezpośrednia (p.
3.4), a wyniki obliczeo zestawid w tabeli 33.6.
Tabela 33.6
Lp.
U
I
P
1
s
n
P
ob1
P
d1
P
el
P
ob2
P
2
M
Uwagi
V
A
W
– obr/s
W
–
N·m
P
m
=
P
Fem
=
R
2
*
=
Na podstawie otrzymanych wyników wykreśla się charakterystyki elektromechaniczne I,
, cos
, M,
s, n = f(P
2
), których orientacyjny przebieg przedstawiono na rysunku 33.7.
Dla mocy P = P
n
należy z charakterystyk wyznaczyd znamionowe wartości parametrów silnika i
porównad je z podanymi przez wytwórcę na tabliczce znamionowej.
3.6
Opracowanie wyników pomiarów
Sprawozdanie z dwiczenia powinno zawierad:
opracowane tabele pomiarowe i przykładowe obliczenia,
charakterystyki biegu jałowego: I
0
, P
0
, cos
0
, I
, I
0w
= f(U
0
) przy f = f
n
,
rozdział strat jałowych,
charakterystyki zwarcia I
z
, P
z
, cos
z
= f(U
z
) przy s = 1, f = f
n
,
obliczenie znamionowego prądu zwarcia,
obliczenie początkowego momentu rozruchowego silnika przy U = U
n
,
charakterystyki elektromechaniczne I,
, cos
, M, s, n = f(P
2
) przy U = U
n
, f = f
n
,
uwagi i wnioski.
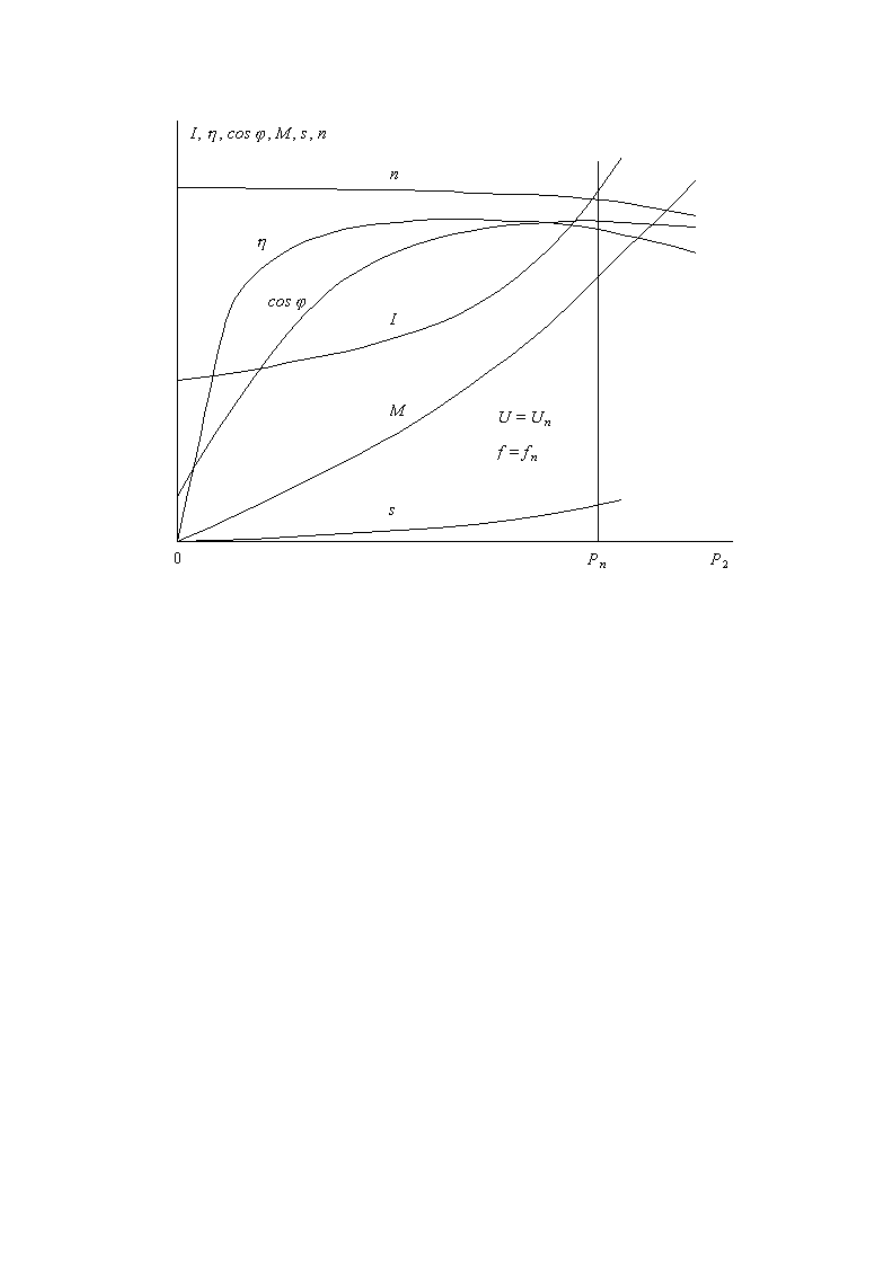
171
Rys. 33.7. Charakterystyki elektromechaniczne silnika indukcyjnego
3.7
Pytania kontrolne
Omówid metody wyznaczania charakterystyk elektromechanicznych maszyn elektrycznych.
Wyjaśnid, dlaczego ze wzrostem napięcia biegu jałowego wartośd współczynnika mocy maleje.
Dlaczego prąd zwarcia zależy od ustawienia wirnika?
Jakie straty dominują podczas próby zwarcia?
W jakim celu wykonuje się próbę bezpośredniego obciążenia silnika.
Omówid straty występujące w silniku i sposób ich określenia.
172
ĆWICZENIE 34
BADANIE SILNIKA INDUKCYJNEGO WIELOBIEGOWEGO
1
Program ćwiczenia
Pomiar rezystancji uzwojeo i określenie schematu połączeo.
Pomiar charakterystyk biegu jałowego.
Pomiar momentu rozruchowego.
Pomiar charakterystyk stanu zwarcia.
Pomiar charakterystyk obciążenia.
2
Cel pomiaru
Silnikami indukcyjnymi wielobiegowymi nazywa się maszyny, w których przez zmianę liczby par
biegunów wirującego pola magnetycznego uzyskuje się kilka znamionowych prędkości obrotowych.
Stosuje się je w napędach urządzeo, w których zmiana prędkości obrotowej może odbywad się
skokowo. Zastosowanie silników wielobiegowych pozwala na zredukowanie zawodnych przekładni
mechanicznych i ułatwia, dzięki prostocie przełączeo, automatyzację sterowania urządzeniem.
Celem dwiczenia jest poznanie budowy, zasady działania i obsługi silnika wielobiegowego. Wyniki
przeprowadzonych pomiarów pozwalają na weryfikację parametrów znamionowych badanej
maszyny, podanych przez wytwórcę na tabliczce znamionowej, oraz porównanie ich z parametrami
typowych maszyn jednobiegowych. Otrzymane charakterystyki umożliwiają przeanalizowanie
wpływu zmian parametrów maszyny przy zmianie liczby par biegunów na właściwości eksploatacyjne
silników wielobiegowych.
3
Omówienie programu ćwiczenia
3.1
Wprowadzenie
Prędkośd obrotowa pola wirującego zależy od liczby par biegunów wytworzonych przez zasilane
uzwojenie i częstotliwości napięcia zasilającego zgodnie z zależnością
(34.1)
Przy zasilaniu uzwojenia napięciem o stałej częstotliwości prędkośd obrotowa silnika indukcyjnego
określona wzorem
(34.2)
jest odwrotnie proporcjonalna do liczby par biegunów.
W silnikach dwubiegowych wymaganą zmianę liczby par biegunów uzyskuje się przez zmianę układu
połączeo grup zezwojów jednego uzwojenia. Pozwala to na dośd dobre wykorzystanie miedzi
uzwojenia. Jeżeli wymagana liczba biegów silnika jest większa od 2, stosuje się więcej uzwojeo.
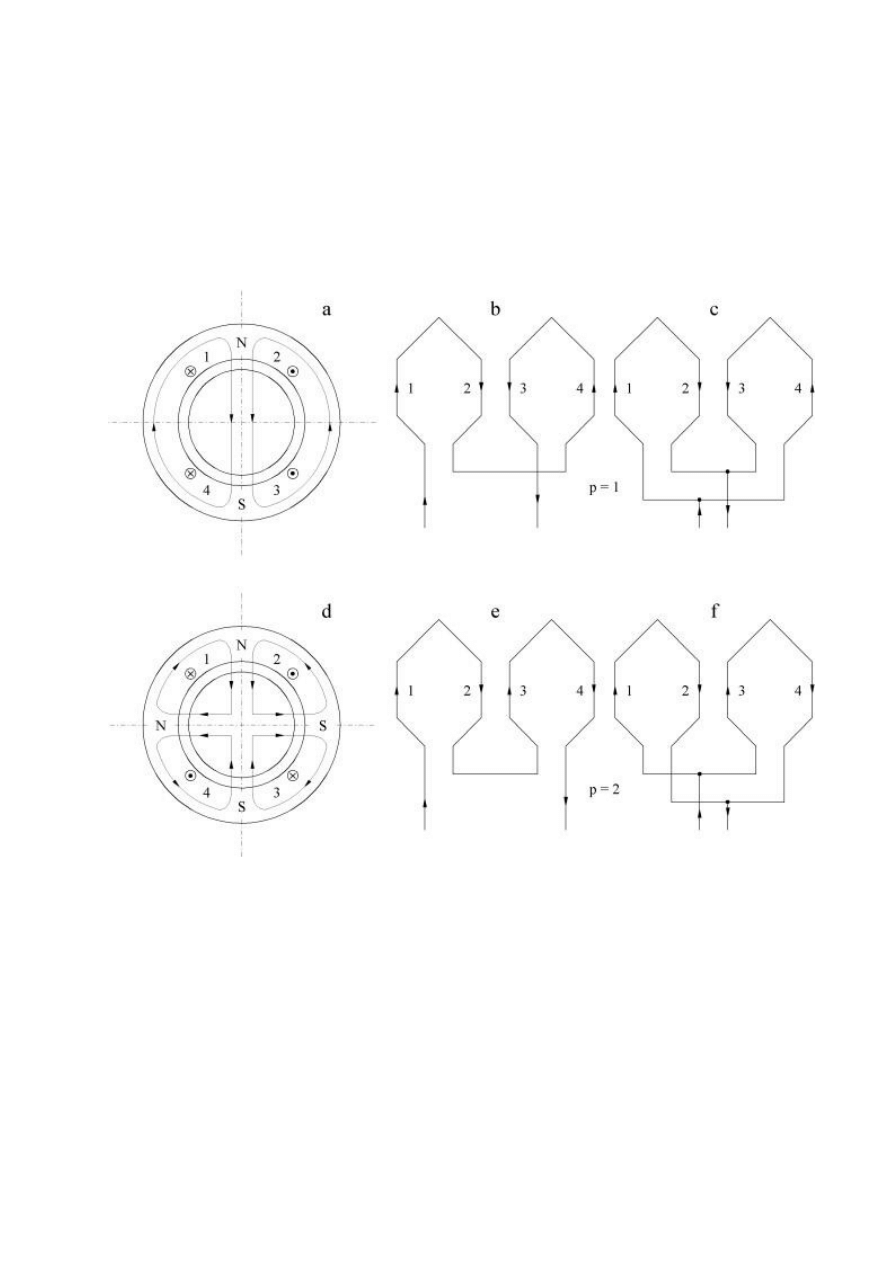
173
Jednocześnie ze zmianą liczby par biegunów uzwojenia stojana identycznej zmianie musi ulec liczba
par biegunów uzwojenia wirnika. W silnikach pierścieniowych spełnienie tego warunku wymaga
wykonania skomplikowanego uzwojenia wirnika oraz wprowadzenia większej liczby pierścieni
ślizgowych. Rozwiązanie takie jest mało technologiczne. Tej wady nie mają silniki klatkowe, w których
liczba par biegunów uzwojenia wirnika automatycznie dopasowuje się do zmian połączeo uzwojenia
stojana, gdyż klatka tworzy uzwojenie wielofazowe z jednym prętem na fazę. Z tego względu w
silnikach wielobiegowych stosuje się wirniki klatkowe.
Rys. 34.1. Połączenia zezwojów przy przełączaniu liczby par biegunów
Sposób połączenia grup zezwojów uzwojenia stojana determinuje wymagany stosunek liczb par
biegunów. Prosty i często stosowany jest sposób Dahlandera, który pozwala na zmianę prędkości
obrotowej w stosunku 1:2. Układy połączeo zezwojów przedstawiono na rys. 34.1. Można je
przełączad zachowując połączenie szeregowe (rys. 34.1b, e) lub równoległe (rys. 34.1c, f). Można
również stosowad połączenie kombinowane: z szeregowego na równoległe (rys. 34.1b, f) i odwrotnie
(rys. 34.1c, e). Na rys. 34.2 przedstawiono układ połączeo oznaczony symbolem /YY. Zezwoje
połączone w trójkąt (rys. 34.2a) wytwarzają dwukrotnie większą liczbę par biegunów niż przy
połączeniu ich w podwójną gwiazdę (rys. 34.2b).
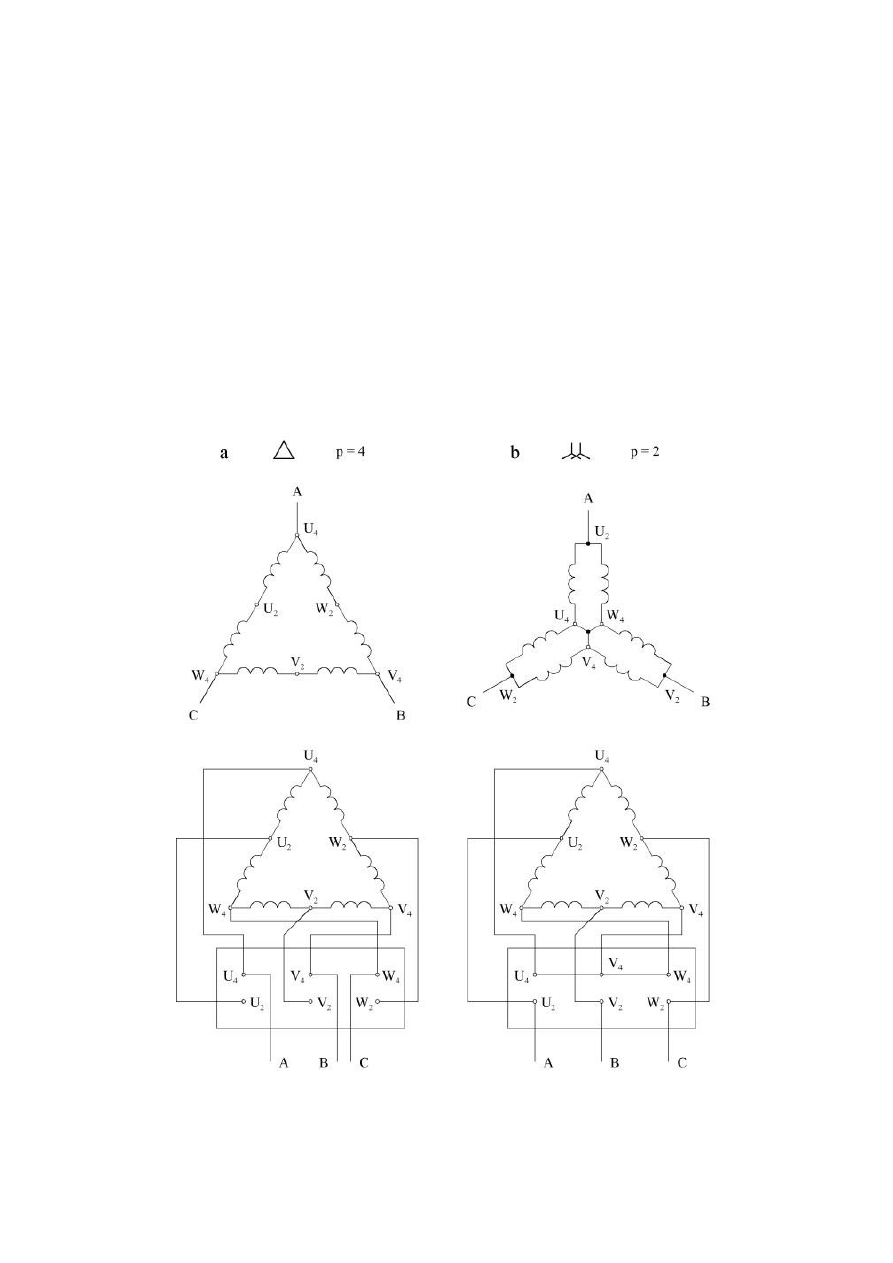
174
Zmieniając liczbę par biegunów, zmieniamy nie tylko prędkośd obrotową, lecz także parametry
magnetyczne i elektryczne silnika. Zmieniają się:
a)
rezystancje i reaktancje uzwojenia,
b)
współczynnik uzwojenia i liczba zwojów połączonych w szereg w fazie, a więc przy tym samym
napięciu zasilającym zmienia się indukcja magnetyczna,
c)
liczba żłobków na biegun i fazę q, a więc zmianie ulega kształt pola i zawartośd wyższych
harmonicznych,
d)
przewodnośd magnetyczna, mniejsza przy większej liczbie par biegunów; przy mniejszej liczbie
par biegunów potrzebny jest mniejszy prąd magnesujący, przez co, przy założeniu stałej indukcji,
poprawia się współczynnik mocy,
e)
napięcie fazowe (przełączenie z trójkąta na gwiazdę),
f)
następstwo faz (rys. 34.2), a więc przy nie zmienionym następstwie faz zasilania zmieni się
kierunek wirowania silnika.
Wymienione zmiany mają wpływ na moc i moment obrotowy silnika.
Rys. 34.2. Schemat przełączenia uzwojenia /YY
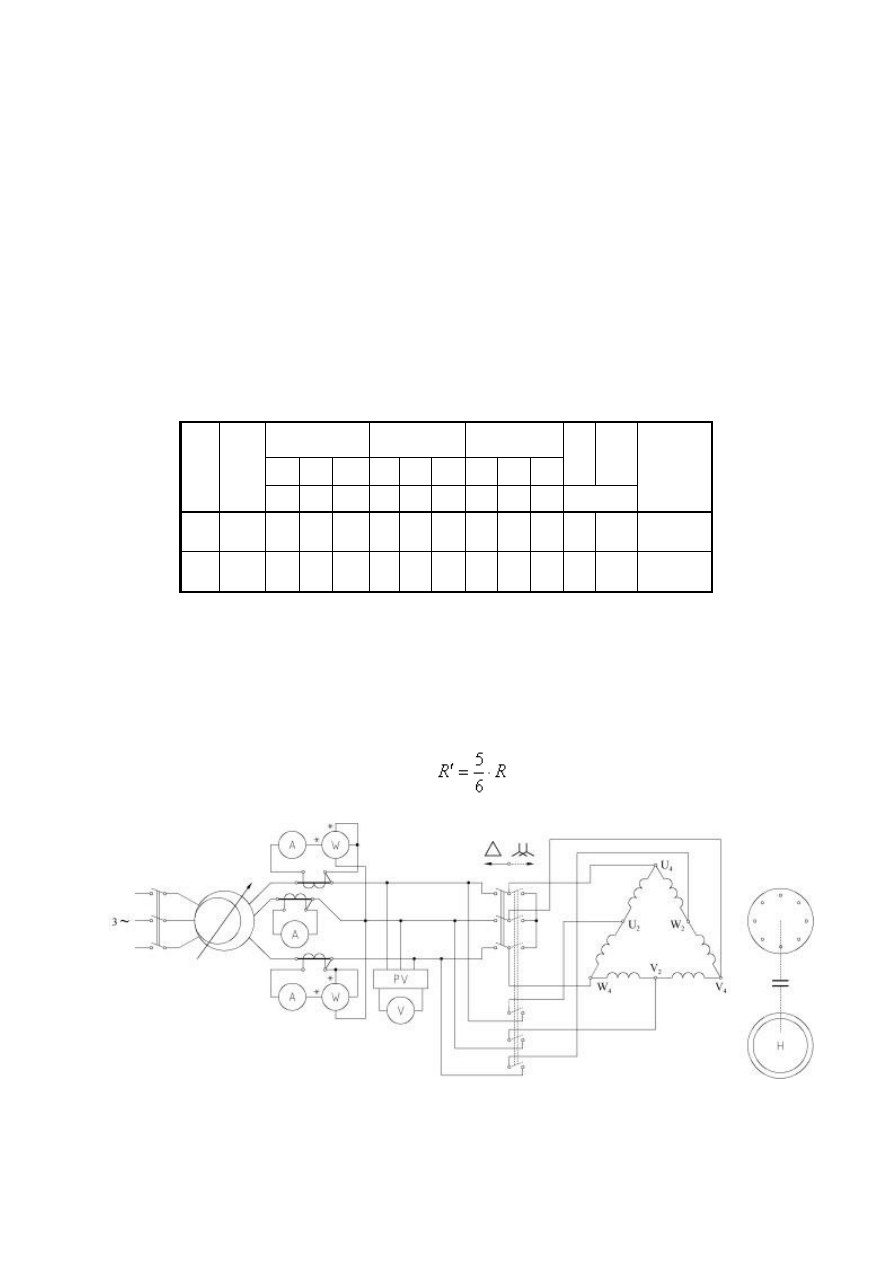
175
3.2
Pomiar rezystancji uzwojeń i określanie schematu połączeń
Przedmiotem badao jest indukcyjny silnik trójbiegowy klatkowy mający w stojanie dwa niezależne
uzwojenia, z których jedno wykonane jest jako przełączalne. Ze względu na ograniczony czas trwania
dwiczenia należy zbadad parametry silnika tylko przy dwu różnych liczbach par biegunów uzyskanych
przez zasilanie uzwojenia przełączalnego. Na tabliczce zaciskowej badanego silnika jest podany przez
wytwórcę sposób przełączania zacisków uzwojenia dla odpowiednich prędkości obrotowych. Zaciski
są oznaczone indeksami, w których cyfra odpowiada otrzymanej liczbie par biegunów.
Pomiar rezystancji uzwojeo należy przeprowadzid metodą techniczną, a otrzymane wyniki zestawid w
tabeli 34.1.
Tabela 34.1
Lp.
p
Faza U
Faza V
Faza W
R
śr
R
*
śr
Uwagi
U
I
R
u
U
I
R
v
U
I
R
w
V
A
V A V A
4
2
Jeżeli uzwojenie silnika ma wyprowadzonych tylko 6 koocówek, to mierzy się rezystancję dwóch
gałęzi równoległych złożonych z szeregowo połączonych rezystancji R zezwojów.
Przy uzwojeniu połączonym w trójkąt (rys. 34.2a) rezystancja między sąsiednimi wyprowadzeniami,
po założeniu równości rezystancji R zezwojów, wynosi
(34.3)
Rys. 34.3. Układ połączeo silnika wielobiegowego do próby biegu jałowego, stanu zwarcia i obciążenia
176
Analogicznie, rezystancja między wyprowadzeniami obejmującymi dwie części uzwojenia (np. jedną z
faz) wynosi
(34.4)
Rezystancja jednej fazy
(34.5)
Przy połączeniu uzwojenia w podwójną gwiazdę (rys. 34.2b) rezystancja jednej fazy
(34.6)
Aby sprawdzid symetrię uzwojeo, należy zmierzyd rezystancje wszystkich faz dla połączenia w trójkąt i
podwójną gwiazdę.
Na podstawie otrzymanych wyników należy narysowad układ połączeo uzwojenia dla obu liczb par
biegunów.
3.3
Pomiar charakterystyk biegu jałowego
Charakterystyki biegu jałowego są to zależności współczynnika mocy, prądu i mocy pobieranych przez
nieobciążony silnik od napięcia zasilającego o znamionowej częstotliwości (cos
0
, I
0
, P
0
= f(U
0
) przy
f = f
n
). Schemat układu pomiarowego przedstawiono na rys. 34.3. W celu usprawnienia połączeo przy
zmianie prędkości należy użyd specjalnego przełącznika sześciobiegunowego /YY pozwalającego na
przełączenie uzwojeo w biegu, po przeprowadzeniu rozruchu przy połączeniu w . Napięcie zasilające
silnik należy zmniejszad za pomocą regulatora indukcyjnego od wartości równej 1,2·U
n
do takiej
wartości napięcia, przy której prąd biegu jałowego silnika zaczyna rosnąd (około 0,3·U
n
). Wyniki
przeprowadzonych pomiarów dla obu prędkości obrotowych zestawia się w tabeli 34.2.
Tabela 34.2
Lp. p
U
0
I
0
P
0
cos
0
P
ob0
P
0
U
0
2
Uwagi
U
AB
U
BC
U
CA
U
śr
I
A
I
B
I
C
I
śr
P
I
P
II
P
0
V
A
W
–
W
V
2
4
2
W tabeli 34.2
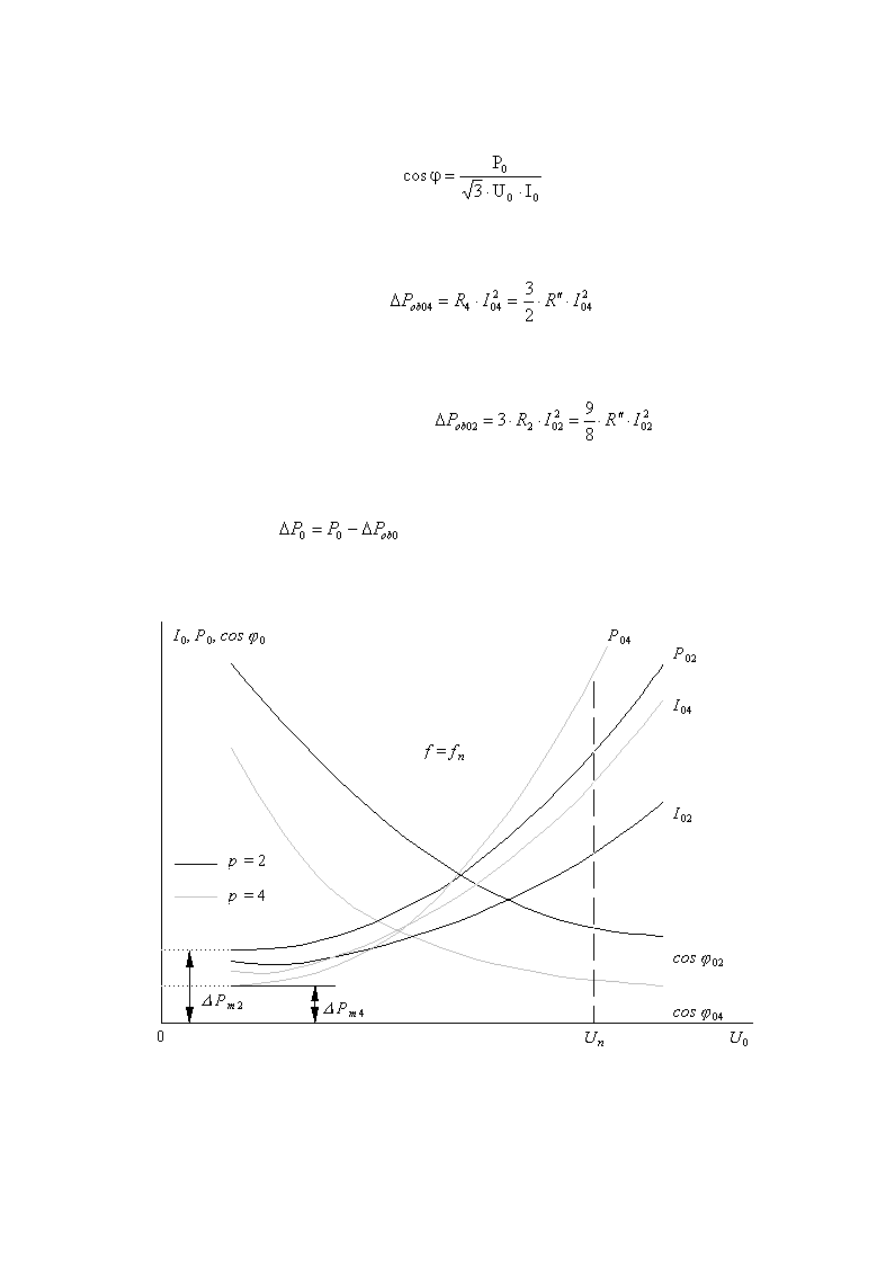
177
–
współczynnik mocy biegu jałowego
(34.7)
–
straty obciążeniowe na biegu jałowym P
ob0
, przy połączeniu uzwojenia w trójkąt
(34.8)
oraz w podwójną gwiazdę
(34.9)
–
straty jałowe
(34.10)
Orientacyjne charakterystyki biegu jałowego przedstawiono na rys. 34.4.
Rys. 34.4. Charakterystyki biegu jałowego
178
Znajomośd mocy P
0
pobieranej przez silnik podczas biegu jałowego pozwala na wyznaczenie strat
mechanicznych
P
m
oraz strat w żelazie
P
Fe
. Rozdział strat jałowych opisano w dwiczeniu 33.
Otrzymane dla obu zakresów prędkości obrotowych wyniki rozdziału strat przy napięciu
znamionowym należy zestawid w tabeli 34.3.
Tabela 34.3
p
P
n
P
0
P
ob0
P
0
P
m
P
Fen
Uwagi
W
4
U = U
n
2
3.4
Pomiar momentu rozruchowego i charakterystyk stanu zwarcia
Moment rozruchowy silnika jest momentem wytwarzanym przez silnik przy zatrzymanym wirniku
(s = 1).
Charakterystyki stanu zwarcia są to zależności współczynnika mocy, prądu i mocy pobieranych przez
silnik przy zatrzymanym wirniku od napięcia zasilającego o znamionowej częstotliwości (cos
z
, I
z
,
P
z
= f(U
z
) przy s = 1, f = f
n
).
Moment rozruchowy i charakterystyki zwarcia należy wyznaczyd jednocześnie w układzie połączeo
jak podczas biegu jałowego (rys. 34.3) z miernikami odpowiednio dobranymi do wielkości mierzonych
przy zwarciu. Wirnik silnika należy unieruchomid, łącząc go z odpowiednio wyskalowanym
dynamometrem umożliwiającym pomiar momentu rozruchowego. Wartośd prądu zwarcia i
początkowego momentu rozruchowego zależą od wzajemnego położenia wirnika i stojana, co należy
sprawdzid przy obracaniu wirnika.
Pomiary w stanie zwarcia powinno się wykonad dla trzech położeo wirnika, przyjmując za dane do
wykreślenia charakterystyk średnie arytmetyczne otrzymanych wyników. Wyjątkowo, ze względu na
dużą liczbę innych pomiarów, w tym dwiczeniu pomiar w stanie zwarcia przeprowadzid można tylko
dla jednego położenia wirnika. Wirnik należy ustawid tak, aby mierzone wartości w przybliżeniu
odpowiadały wartościom średnim. Ponieważ silnik nie jest chłodzony (n = 0), pomiary należy
przeprowadzid możliwie szybko.
W zakresie zmian prądu zwarcia od I
z
= 1,2·I
n
do I
z
= 0 wykonuje się pomiary dla obu biegów silnika, a
otrzymane wyniki zestawia w tabeli 34.4.
179
Tabela 34.4
Lp. p
U
z
I
z
P
z
M
r
cos
z
Uwagi
U
AB
U
BC
U
CA
U
śr
I
A
I
B
I
C
I
śr
P
I
P
II
P
F
r
r
M
V
A
W
N m N·m
–
4
2
W tabeli 34.4
–
moment rozruchowy
(34.11)
Na podstawie otrzymanych wyników pomiarów i obliczeo należy wykreślid, dla obu połączeo
uzwojenia stojana, charakterystyki momentu rozruchowego i charakterystyki zwarcia; przykładowe
ich przebiegi przedstawiono na rys. 34.5 i 34.6. Ponieważ w maszynie występuje moment strat
spowodowany tarciem statycznym, krzywa M
r
= f(U
z
) przecina oś momentu poniżej zera.
Na podstawie wykresu I
z
= f(U
z
) należy obliczyd przybliżoną wartośd znamionowego prądu zwarcia
(prądu rozruchowego przy U = U
n
)
(34.12)
Napięcie zwarcia U
zn
jest to napięcie, przy którym prąd zwarcia jest równy prądowi znamionowemu
zasilanego uzwojenia. Dla typowych maszyn indukcyjnych U
zn
= (0,1÷0,3)·U
n
. Sposób określania
wartości U
zn
i U
z
przedstawiono na rys. 33.4.
Przybliżoną wartośd momentu rozruchowego przy znamionowym napięciu należy obliczyd z
zależności
(34.13)
gdzie: M
r1
– moment rozruchowy przy I
z
= I
n
.
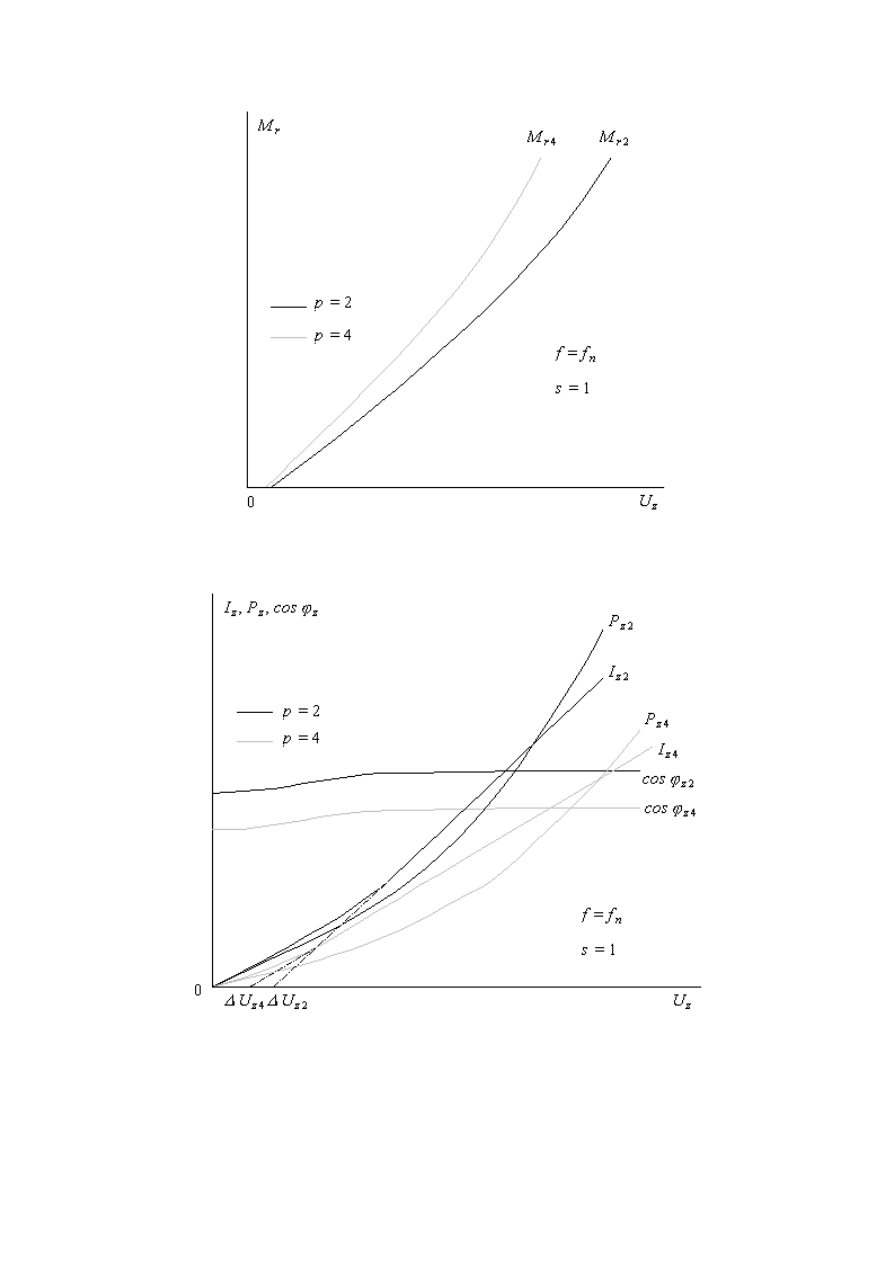
180
Rys. 34.5. Charakterystyki momentu rozruchowego
Rys. 34.6. Charakterystyki stanu zwarcia
W zależności (34.13) nie uwzględniono momentu tarcia, który ma wartośd stałą, niezależną od prądu.
181
Na podstawie otrzymanych wyników oblicza się krotnośd prądu rozruchowego
(34.14)
oraz krotnośd momentu rozruchowego
(34.15)
Znamionową wartośd prądu I
n
należy wyznaczyd z charakterystyk obciążenia dla znamionowej
mocy P
2
, natomiast moment znamionowy wynosi
(34.16)
Obliczenia należy przeprowadzid dla obu zakresów prędkości obrotowych, a wyniki zestawid w
tabeli 34.5.
Tabela 34.5
p
I
n
M
n
U
zn
U
z
I
zn
M
rn
k
Ir
k
Mr
Uwagi
A
N·m
V
A
N·m
–
–
4
2
3.5
Pomiar charakterystyk obciążenia
Charakterystyki obciążenia to zależności prądu obciążenia, współczynnika mocy, prędkości obrotowej
i sprawności od mocy oddawanej przy znamionowych: napięciu i częstotliwości (I, cos
, n,
= f(P
2
)
przy U = U
n
, f = f
n
). Układ pomiarowy przedstawiono na rys. 34.3. Badany silnik obciążony jest
maszyną hamulcową tak, iż istnieje możliwośd pomiaru momentu obciążenia.
Pomiary należy rozpocząd od obciążenia maksymalnego, tj. takiego, przy którym prąd pobierany
przez silnik I = 1,2·I
n
(uwaga! prąd znamionowy dla poszczególnych prędkości obrotowych ma różną
wartośd). Zmniejszając obciążenie do biegu jałowego silnika, należy wykonad pomiary, a wyniki
zestawid w tabeli 34.6.
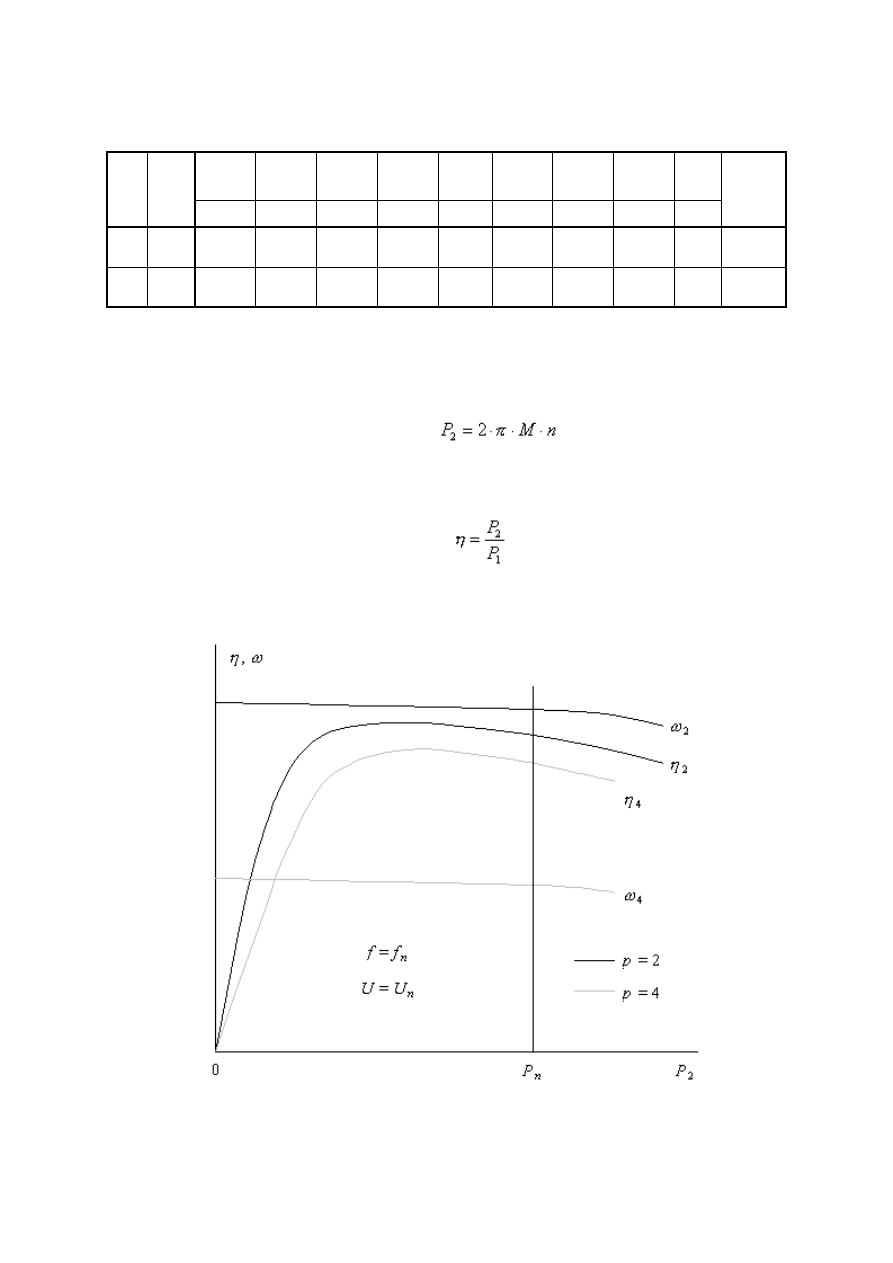
182
Tabela 34.6
Lp.
p
U
śr
I
śr
P
1
F
M
cos
n
P
2
Uwagi
V
A
W
N
N·m
–
obr/s
W
–
4
r =
2
r =
W tabeli 34.6:
–
moc oddawana przez silnik
(34.17)
–
sprawnośd silnika
(34.18)
Orientacyjne charakterystyki obciążenia badanego silnika przedstawiono na rys. 34.7 i 34.8.
Rys. 34.7. Charakterystyki obciążenia (sprawnośd, prędkośd kątowa)
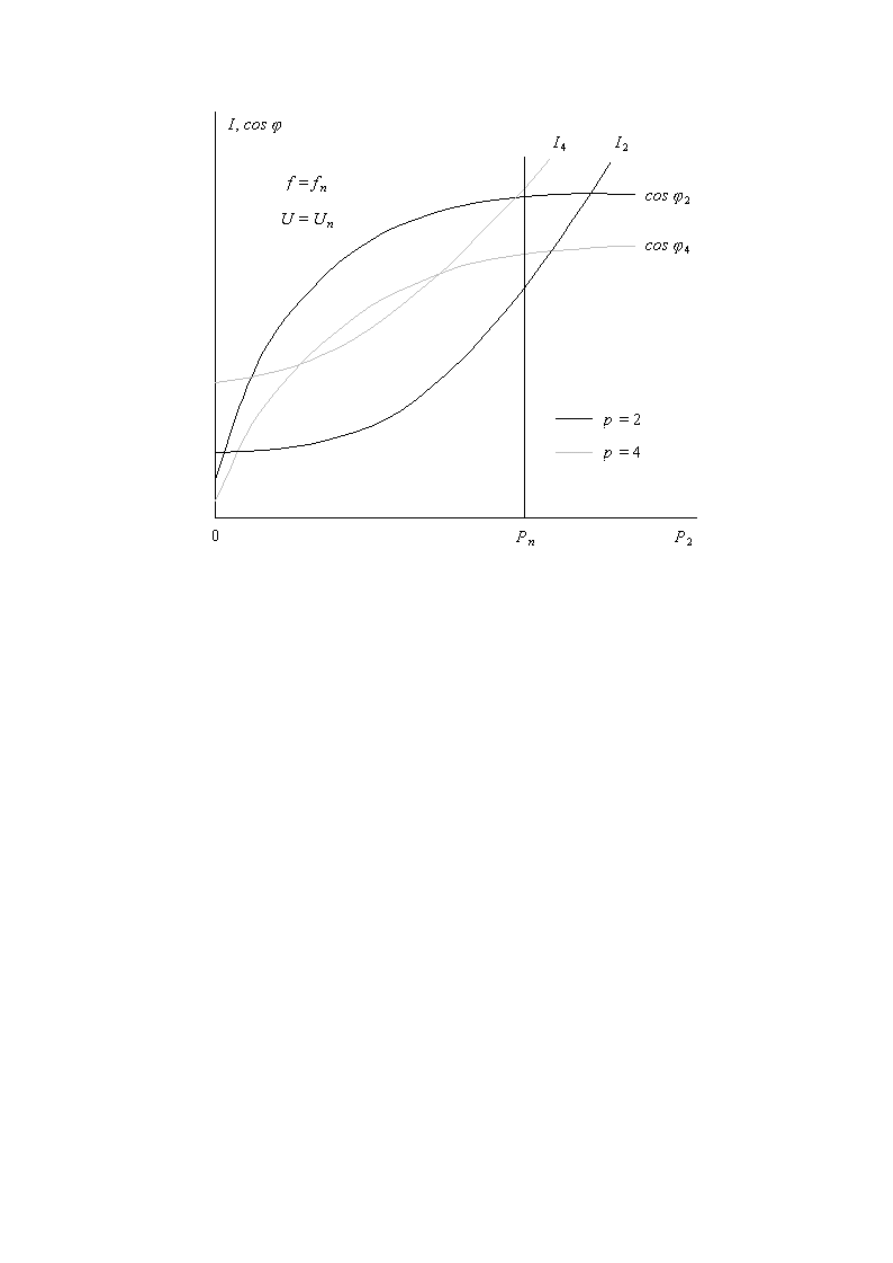
183
Rys. 34.8. Charakterystyki obciążenia (prąd i współczynnik mocy)
4
Opracowanie wyników pomiarów
Sprawozdanie z dwiczenia powinno zawierad:
opracowane tabele pomiarowe i przykładowe obliczenia,
obliczone rezystancje poszczególnych zezwojów i schematy połączeo dla obydwu liczb par
biegunów,
charakterystyki biegu jałowego: I
0
, P
0
, cos
0
= f(U
0
) przy f = f
n
,
przeprowadzenie rozdziału strat biegu jałowego,
charakterystykę momentu rozruchowego M
r
= f(U
z
) przy n = 0, f = f
n
,
charakterystyki stanu zwarcia: I
z
, P
z
, cos
z
= f(U
z
) przy n = 0, f = f
n
,
charakterystyki obciążenia I, cos
, n,
= f(P
2
) przy U = U
n
, f = f
n
,
obliczone krotności prądu rozruchowego k
Ir
i momentu rozruchowego k
Mr
,
uwagi i wnioski.
5
Pytania kontrolne
Podad sposoby regulacji prędkości obrotowych silników indukcyjnych.
Przedstawid budowę silników wielobiegowych.
Podad najczęściej stosowane układy połączeo uzwojeo stojanów silników wielobiegowych.
Opisad składowe strat jałowych silnika indukcyjnego i sposób ich rozdziału.
Opisad wpływ zmiany liczby par biegunów na parametry silnika.
Przeanalizowad zalety i wady indukcyjnych silników wielobiegowych.
Przedstawid sposoby wyznaczania znamionowego prądu zwarcia.

184
ĆWICZENIE 35
BADANIE SILNIKA INDUKCYJNEGO JEDNOFAZOWEGO
1
Program ćwiczenia
Pomiar rezystancji uzwojeo.
Pomiar prędkości obrotowej wyłączenia uzwojenia rozruchowego.
Wyznaczanie charakterystyk biegu jałowego.
Pomiar charakterystyk stanu zwarcia.
Pomiar momentu rozruchowego dla różnych impedancji włączonych w obwód uzwojenia
pomocniczego.
Wyznaczenie charakterystyk obciążenia.
2
Cel pomiaru
Silniki jednofazowe są budowane na stosunkowo niewielkie moce. Do określenia właściwości
eksploatacyjnych tych silników nie należy stosowad metod pośrednich, gdyż łatwo można wykonad
wszystkie próby przy obciążeniu bezpośrednim.
Celem dwiczenia jest poznanie budowy i zasady działania silnika jednofazowego oraz
przeprowadzenie podstawowych badao wymaganych przez normę dla tego typu silników.
Przeprowadzone pomiary pozwolą na zbadanie wpływu uzwojenia pomocniczego na pracę silnika
oraz na porównanie otrzymanych parametrów ze znamionowymi, podanymi przez wytwórcę.
3
Omówienie programu ćwiczenia
3.1
Wprowadzenie
Uzwojeniem głównym silnika indukcyjnego jednofazowego jest znajdujące się w stojanie uzwojenie
jednofazowe. Wirnik silnika jest klatkowy.
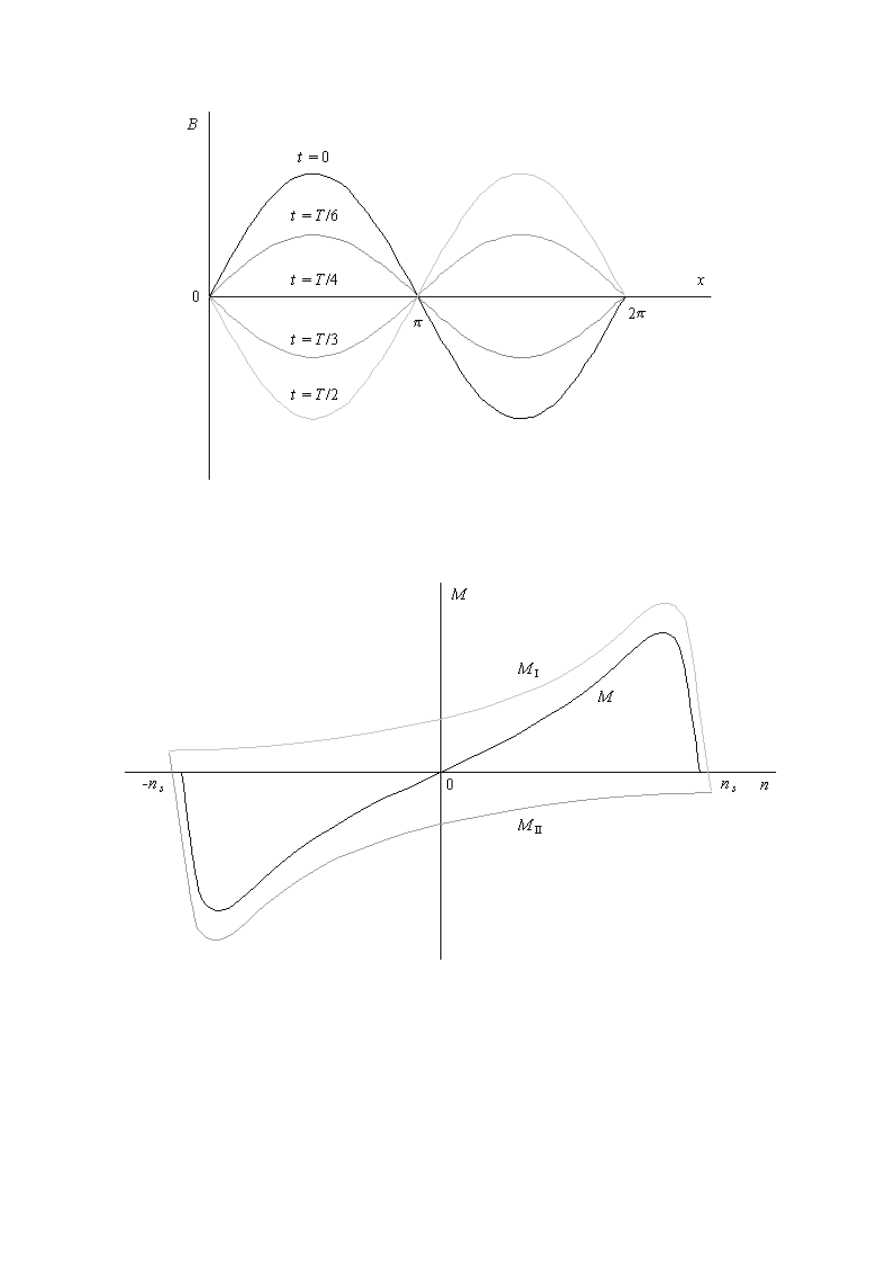
185
Rys. 35.1. Przebieg podstawowej harmonicznej przestrzennej pola wytworzonego przez uzwojenie jednofazowe
dla różnych chwil czasowych
Rys. 35.2. Przybliżony przebieg momentów silnika indukcyjnego jednofazowego
Zasilane prądem przemiennym uzwojenie stojana indukuje w szczelinie maszyny pole zmienne (rys.
35.1), które można rozłożyd na dwa pola wirujące w przeciwnych kierunkach. Na rys. 35.2
przedstawiono przebiegi momentów od obu pól wirujących (M
I
, M
II
) oraz moment wypadkowy (M) w
zależności od prędkości obrotowej. Przy n = 0 silnik indukcyjny jednofazowy nie wytwarza momentu
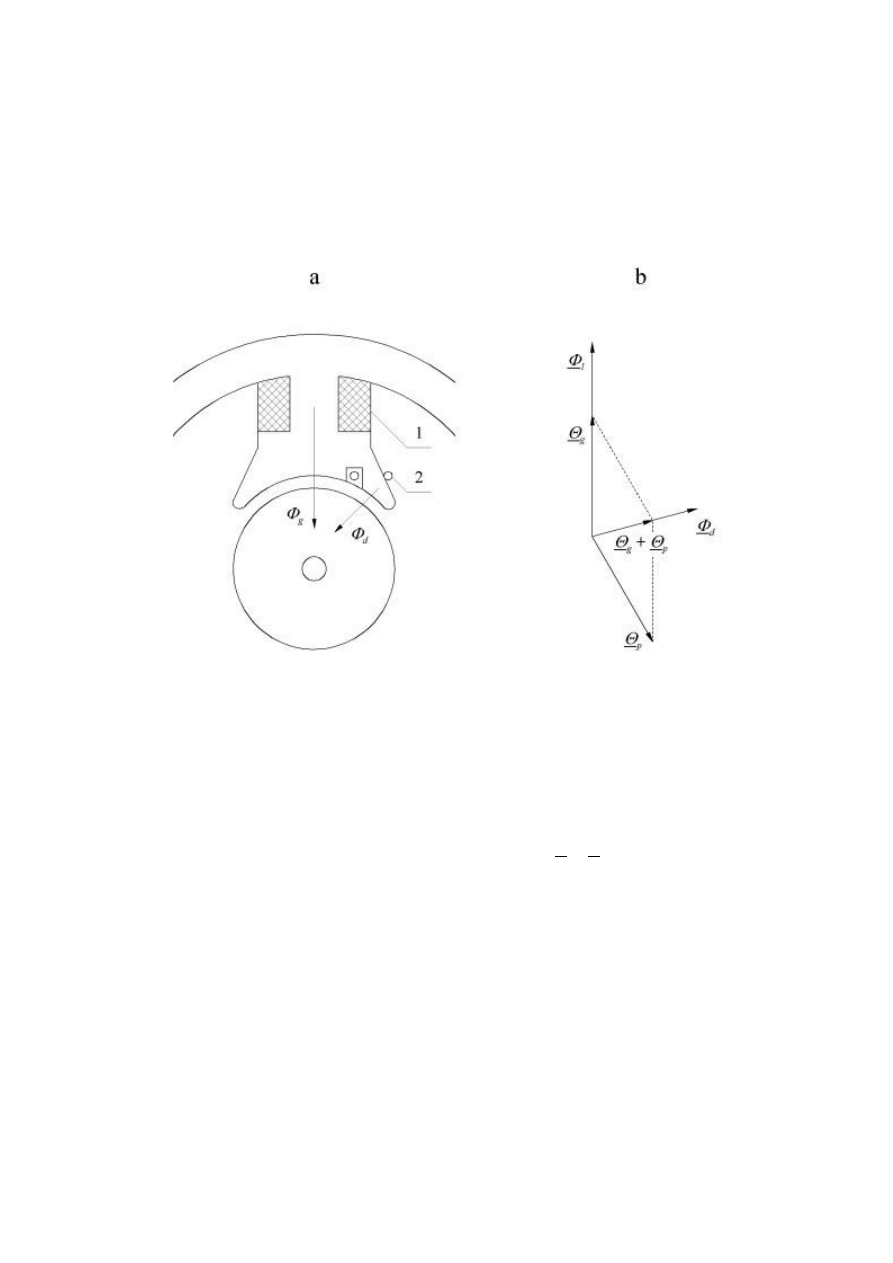
186
rozruchowego. Jeżeli jednak wirnikowi nada się pewną prędkośd obrotową w dowolnym kierunku, to
pojawia się różny od zera moment powodujący dalszy rozruch silnika.
Silnik jednofazowy może wytwarzad moment rozruchowy, jeżeli zmieni się rozkład indukcji w
szczelinie. W tym celu w stojanie umieszcza się uzwojenie dodatkowe pracujące bądź tylko w chwili
rozruchu (uzwojenie rozruchowe), bądź też w sposób ciągły (uzwojenie pomocnicze).
Rys. 35.3. Silnik z uzwojeniem pomocniczym zwartym: a) zasada budowy, b) wykres wskazowy,
1 - uzwojenie główne, 2 - uzwojenie pomocnicze
Małe silniki jednofazowe są często budowane z uzwojeniem pomocniczym zwartym (rys. 35.3). Mają
one wirnik klatkowy i uzwojenie stojana skupione w postaci cewek (1) nałożonych na bieguny
stojana. Na każdym biegunie znajduje się żłobek, który dzieli nabiegunnik na dwie nierówne części.
Uzwojenie pomocnicze (2) stanowi zwój zwarty obejmujący mniejszą częśd nabiegunnika. Powstaje w
ten sposób dodatkowy strumieo
d
wywołany sumą przepływów
g
+
p
(
g
- przepływ uzwojenia
głównego,
p
- przepływ uzwojenia pomocniczego). Przesunięte względem siebie w czasie i
przestrzeni strumienie
g
i
d
tworzą wirujące pole eliptyczne powodujące powstanie niewielkiego
momentu rozruchowego, wystarczającego do uruchomienia silnika. Wadą tego rozwiązania jest mała
sprawnośd silników, duże straty stałe w zwoju zwartym i mały moment rozruchowy (ok. 0,25·M
n
).
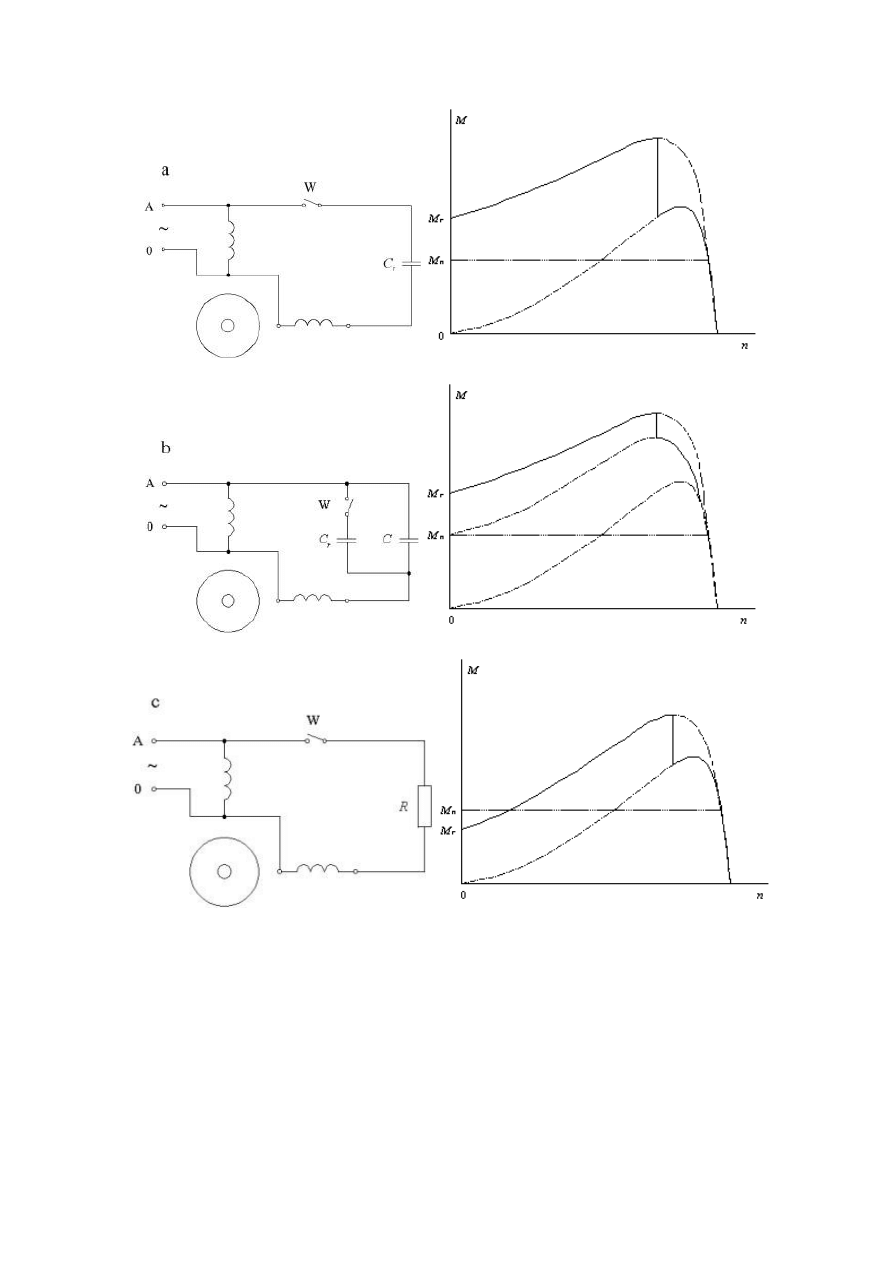
187
Rys. 35.4. Schemat połączeo i wykres momentów silnika jednofazowego: a) z uzwojeniem
rozruchowym kondensatorowym, b) z uzwojeniem pomocniczym kondensatorowym, c) z
uzwojeniem rozruchowym rezystancyjnym
Innym, lepszym, rozwiązaniem jest nawinięcie dodatkowego uzwojenia umieszczonego w stojanie w
żłobkach nie wykorzystanych przez uzwojenie główne tak, aby osie obu uzwojeo były przesunięte
względem siebie o kąt /2. Jeżeli prądy płynące w uzwojeniu głównym i pomocniczym są przesunięte
o kąt
= /2, to przy jednakowych przepływach obu uzwojeo wytworzone pole wirujące jest kołowe,
a więc moment rozruchowy jest największy.
188
Przesunięcie fazowe prądów uzyskuje się przez włączenie w szereg z uzwojeniem pomocniczym
kondensatorów (rys. 35.4a, b) lub powiększenie rezystancji tego uzwojenia (rys. 35.4c). Uzwojenie
wykorzystywane tylko podczas rozruchu wyłączane jest za pomocą wyłącznika odśrodkowego W,
umieszczonego na wale silnika. Czasem stosuje się silniki z dwoma kondensatorami (rys. 35.4b), z
których jeden jest załączony tylko na czas rozruchu, natomiast drugi pracuje ciągle. Rozwiązanie takie
stosuje się po to, aby uzyskad pole jak najbardziej zbliżone do kołowego zarówno podczas rozruchu
(większy moment rozruchowy), jak i podczas obciążenia (większy współczynnik mocy), kiedy to
potrzebna pojemnośd kondensatora maleje kilkakrotnie. W celu uproszczenia konstrukcji często
rezygnuje się ze zmiany pojemności i wówczas uzwojenie pomocnicze współpracuje z jednym, stale
załączonym, kondensatorem.
Zwiększenie momentu rozruchowego przez zwiększenie rezystancji uzwojenia dodatkowego (rys.
35.4c) uzyskuje się najczęściej po nawinięciu tego uzwojenia przewodem o odpowiednio
zmniejszonym przekroju.
Według PN-IEC 34-1:1997 minimalny moment rozruchowy M
rmin
silników jednofazowych nie może
byd mniejszy od 0,3·M
n
.
Jeżeli w sieci zasilającej silnik trójfazowy powstanie przerwa w jednej z faz, to silnik taki nie
zatrzymuje się, lecz pracuje nadal jako silnik jednofazowy. Jego moc w takim przypadku maleje około
dwukrotnie. Stosując odpowiedni układ połączeo faz silnika trójfazowego i odpowiednio dobranych
elementów RLC można, przy zasilaniu go napięciem jednofazowym, uzyskad moc zbliżoną do jego
mocy znamionowej.
Wadą silników jednofazowych jest ich mniejsza sprawnośd niż silników trójfazowych. Wynika to stąd,
że strumieo przeciwbieżny ma względem wirnika prędkośd większą od synchronicznej i wywołuje w
jego rdzeniu duże straty.
3.2
Pomiar rezystancji uzwojeń
Pomiar rezystancji uzwojenia głównego R
g
i uzwojenia dodatkowego R
d
należy przeprowadzid metodą
techniczną, a wyniki zestawid w tabeli 35.1.
Tabela 35.1
Lp.
Uzwojenie główne
Uzwojenie rozruchowe
Uwagi
U
I
R
g
R
*
gśr
U
I
R
d
R
*
dśr
V
A
V
A
gdzie: R
*
śr
– średnia rezystancja przeliczona na umowną temperaturę pracy.
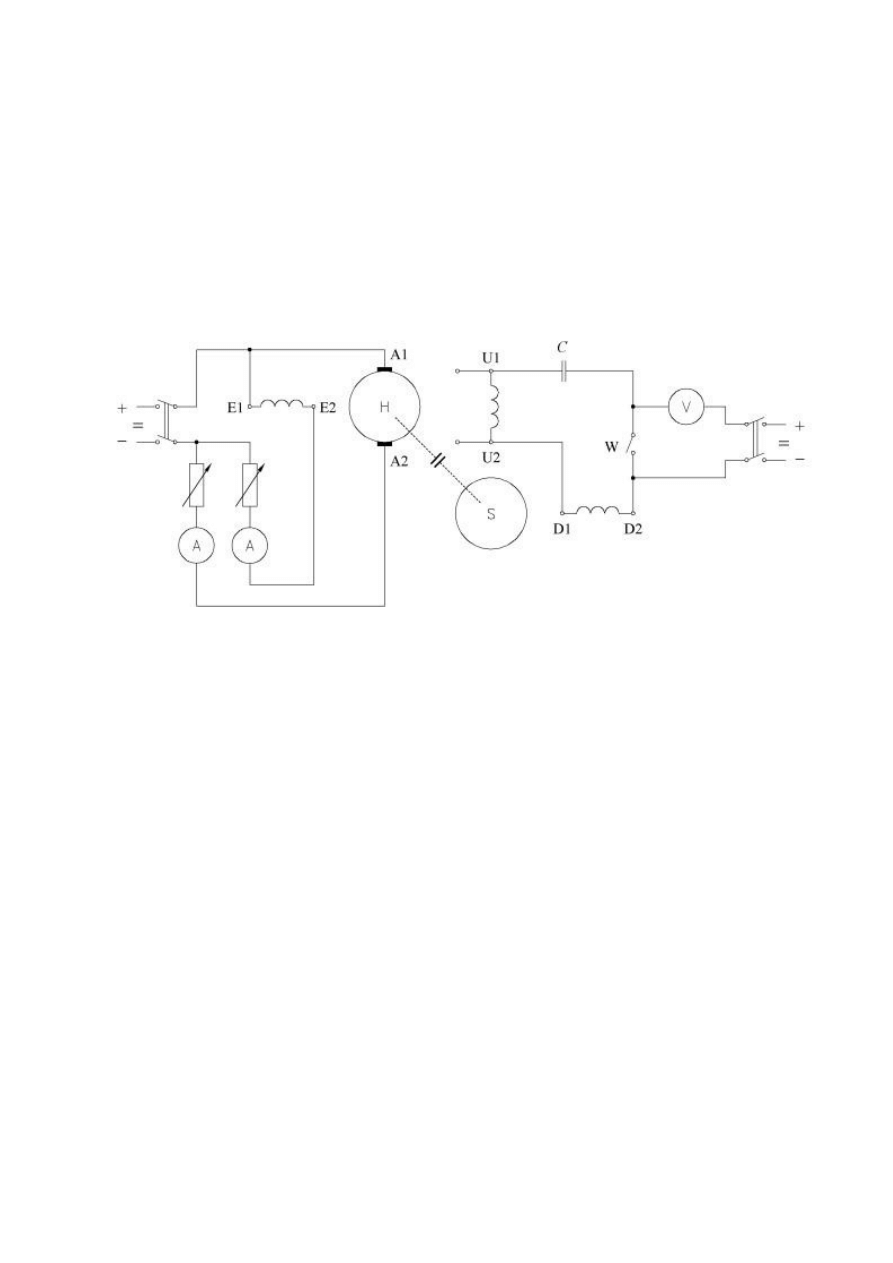
189
3.3
Pomiar prędkości obrotowej wyłączania uzwojenia rozruchowego
Jeżeli badany silnik ma wyłącznik odśrodkowy, należy zmierzyd prędkośd obrotową wyłączania
uzwojenia rozruchowego (lub jednego z kondensatorów uzwojenia pomocniczego). Układ pomiarowy
przedstawiono na rys. 35.5. Silnik jednofazowy jest napędzany maszyną bocznikową prądu stałego.
Do zacisków wyłącznika odśrodkowego przyłączony jest obwód kontrolny, złożony ze źródła napięcia
stałego i szeregowo włączonego woltomierza, pozwalający stwierdzid, czy wyłącznik W jest otwarty
czy też zamknięty. Jeśli wyłącznik jest zamknięty, woltomierz wskazuje wartośd napięcia zasilającego
obwód kontrolny, natomiast jeśli otwarty, wskazuje zero.
Rys. 35.5. Układ połączeo do pomiaru prędkości obrotowej wyłączania uzwojenia rozruchowego
W celu zmierzenia prędkości obrotowej wyłączenia uzwojenia rozruchowego należy powoli zwiększad
prędkośd obrotową silnika napędowego SN tak, aby można było określid prędkośd obrotową w chwili,
kiedy woltomierz w obwodzie kontrolnym wskaże zero. Prędkośd obrotową mierzy się stroboskopem.
Aby zmniejszyd błąd pomiaru, należy wykonad trzy próby i obliczyd wartośd średnią otrzymanych
prędkości obrotowych wyłączenia uzwojenia rozruchowego. Zmierzona prędkośd obrotowa powinna
mieścid się w granicach 0,91 prędkości odpowiadającej momentowi krytycznemu (jeśli normy
przedmiotowe nie stanowią inaczej). Ponieważ w dwiczeniu nie będzie wyznaczana prędkośd n
kryt
, jej
wartośd zostanie podana.
3.4
Pomiar charakterystyk biegu jałowego
Charakterystyki biegu jałowego są to zależności poślizgu, współczynnika mocy, natężenia prądu i
mocy pobieranej przez nieobciążony silnik od napięcia zasilającego o znamionowej częstotliwości (s,
cos
0
, I
0
, P
0
= f(U
0
) przy f = f
n
).
Układ pomiarowy przedstawiono na rys. 35.6. Napięcie zasilające silnik należy zmniejszad od 1,2·U
n
do takiego napięcia minimalnego, przy którym prąd I
0
zaczyna wzrastad (ok. 0,3·U
n
). Poślizg wyznacza
się metodą stroboskopową lub, jeśli jego wartości są większe, mierzy się stroboskopem prędkośd
obrotową, a wartośd poślizgu oblicza z ogólnej zależności. Wyniki pomiarów i obliczeo należy
zestawid w tabeli 35.2.
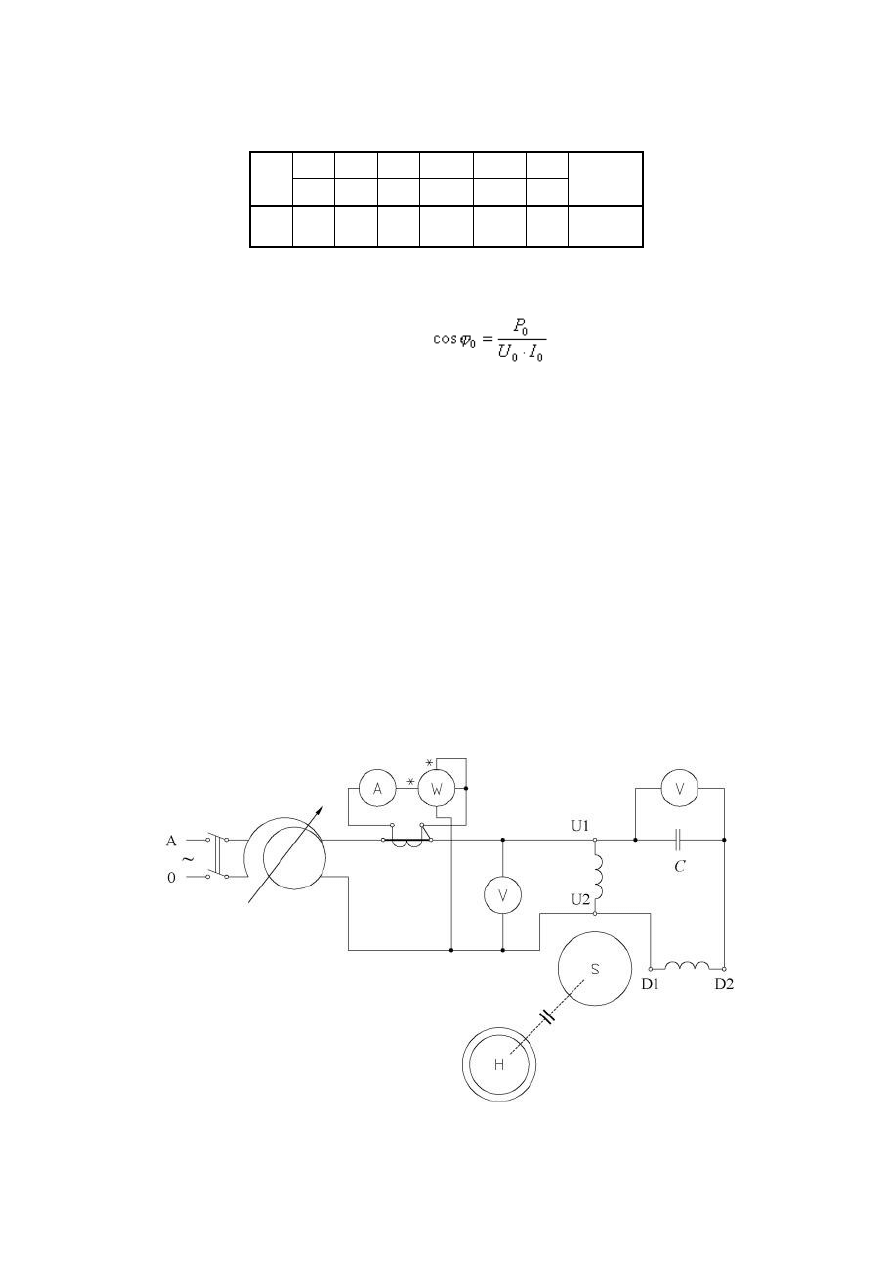
190
Tabela 35.2
Lp.
U
0
I
0
P
0
n
cos
0
s
Uwagi
V
A
W
obr/s
–
–
W tabeli 35.2
(35.1)
Na podstawie przeprowadzonych pomiarów wykreśla się charakterystyki biegu jałowego, których
orientacyjne przebiegi przedstawiono na rys. 35.7. Charakterystyki biegu jałowego umożliwiają,
podobnie jak przy badaniu silnika trójfazowego, określenie strat jałowych i wyznaczenie przybliżonej
wartości strat mechanicznych oraz pozwalają ocenid poprawnośd konstrukcji silnika, szczelinę
maszyny itp.
Prąd biegu jałowego ma dwie składowe. Pierwsza odpowiadająca prądowi wirnika o częstotliwości s·f
jest, podobnie jak w silniku trójfazowym, bardzo mała. Druga natomiast odpowiadająca prądowi
wirnika o częstotliwości (2-s)·f ma znaczną wartośd. Dlatego wypadkowy prąd biegu jałowego silnika
jednofazowego może byd znacznie większy (do 3 razy) niż prąd biegu jałowego odpowiadającego mu
silnika trójfazowego.
Prąd biegu jałowego silników jednofazowych z kondensatorowym uzwojeniem pomocniczym jest
mniejszy, ponieważ wytwarzane w tym silniku pole jest polem wirującym, toteż nie są indukowane w
wirniku prądy o częstotliwości (2-s)f.
Rys. 35.6. Układ połączeo do próby biegu jałowego, stanu zwarcia i obciążenia
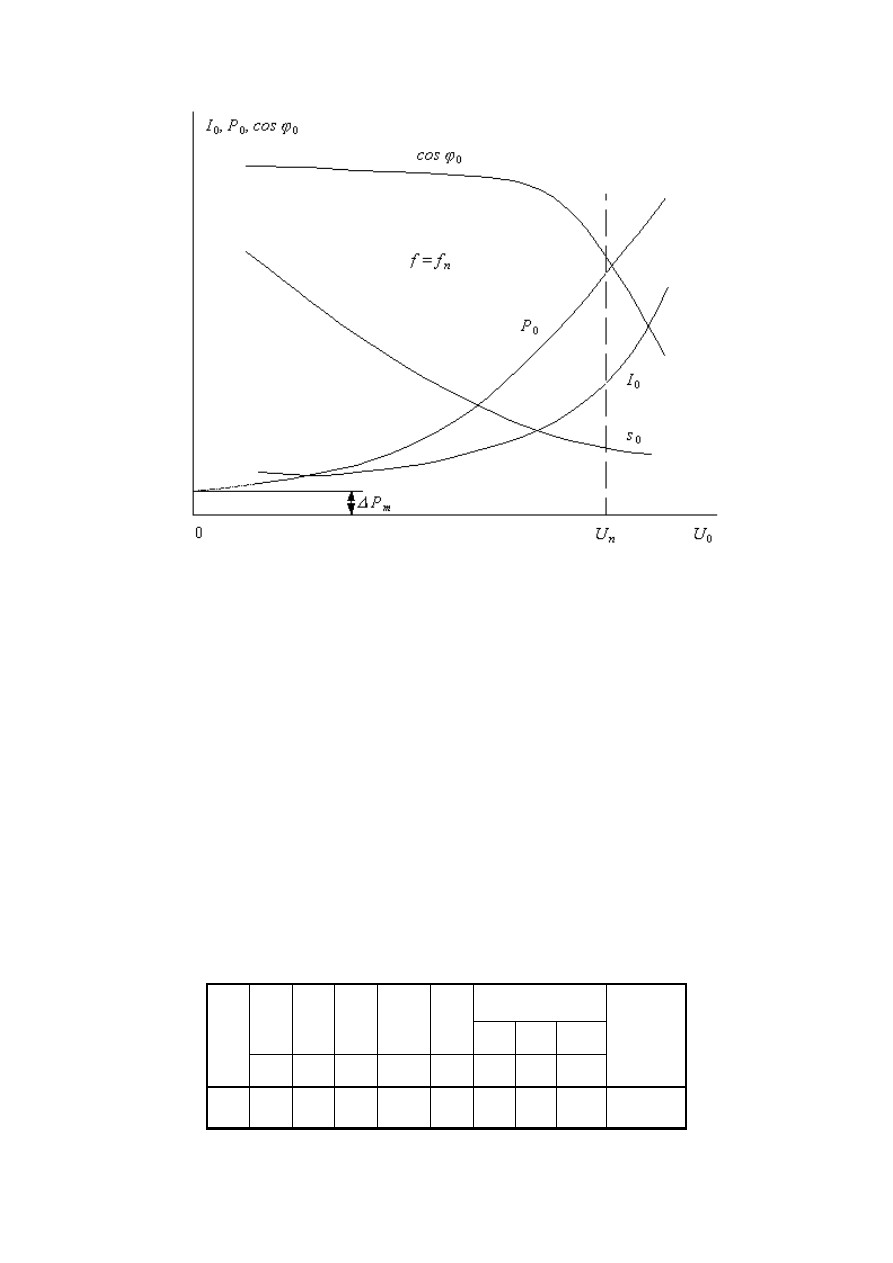
191
Rys. 35.7. Charakterystyki biegu jałowego
3.5
Pomiar charakterystyk stanu zwarcia
Charakterystyki stanu zwarcia są to zależności momentu rozruchowego, współczynnika mocy,
natężenia prądu i mocy pobieranych przez silnik przy zatrzymanym wirniku od napięcia zasilającego o
znamionowej częstotliwości (M
r
, cos
z
, I
z
, P
z
= f(U
z
) przy s = 1, f = f
n
).
Pomiary wykonuje się w układzie połączeo przedstawionym na rys. 35.6. Przed przystąpieniem do
pomiarów należy ustalid położenie wirnika odpowiadające najmniejszej wartości momentu
rozruchowego. Określa się je przy obniżonym napięciu, obracając powoli wirnik w kierunku
przeciwnym do kierunku wirowania pola. Dla tego położenia, zmniejszając wartośd napięcia
zasilającego od wartości, przy której prąd zwarcia wynosi ok. 1,2·I
n
do zera, należy zmierzyd moment
rozruchowy, natężenie prądu i moc pobieraną przez silnik. Wyniki pomiarów należy zestawid w tabeli
35.3.
Tabela 35.3
Lp.
U
z
I
z
P
z
cos
z
U
c
M
r
Uwagi
r
F
r
M
r
V
A
W
–
V
m
N
N·m
192
W tabeli 35.3
(35.2)
W przypadku silników z kondensatorem mierzy się również wartośd napięcia na kondensatorze, które
nie powinno przekroczyd wartości określonych przez normę (600V przy U
n
=230V).
Na podstawie otrzymanych wyników należy wykreślid charakterystyki zwarcia, których przykładowe
przebiegi przedstawiono na rys. 35.8.
Przybliżone wartości początkowego momentu rozruchowego i prądu rozruchowego przy
znamionowym napięciu zasilania oblicza się z zależności
(35.3)
(35.4)
gdzie: I
z
, M
r
– wartości prądu zwarcia i momentu rozruchowego przy U = U
z
,
U
n
– napięcie znamionowe.
Wartośd napięcia na kondensatorze przy znamionowym napięciu zasilania określona jest wzorem
(35.5)
gdzie: U
c
– napięcie na kondensatorze przy U = U
z
.
Otrzymane wyniki pomiarów i obliczeo należy porównad z wymaganiami stawianymi przez normę.
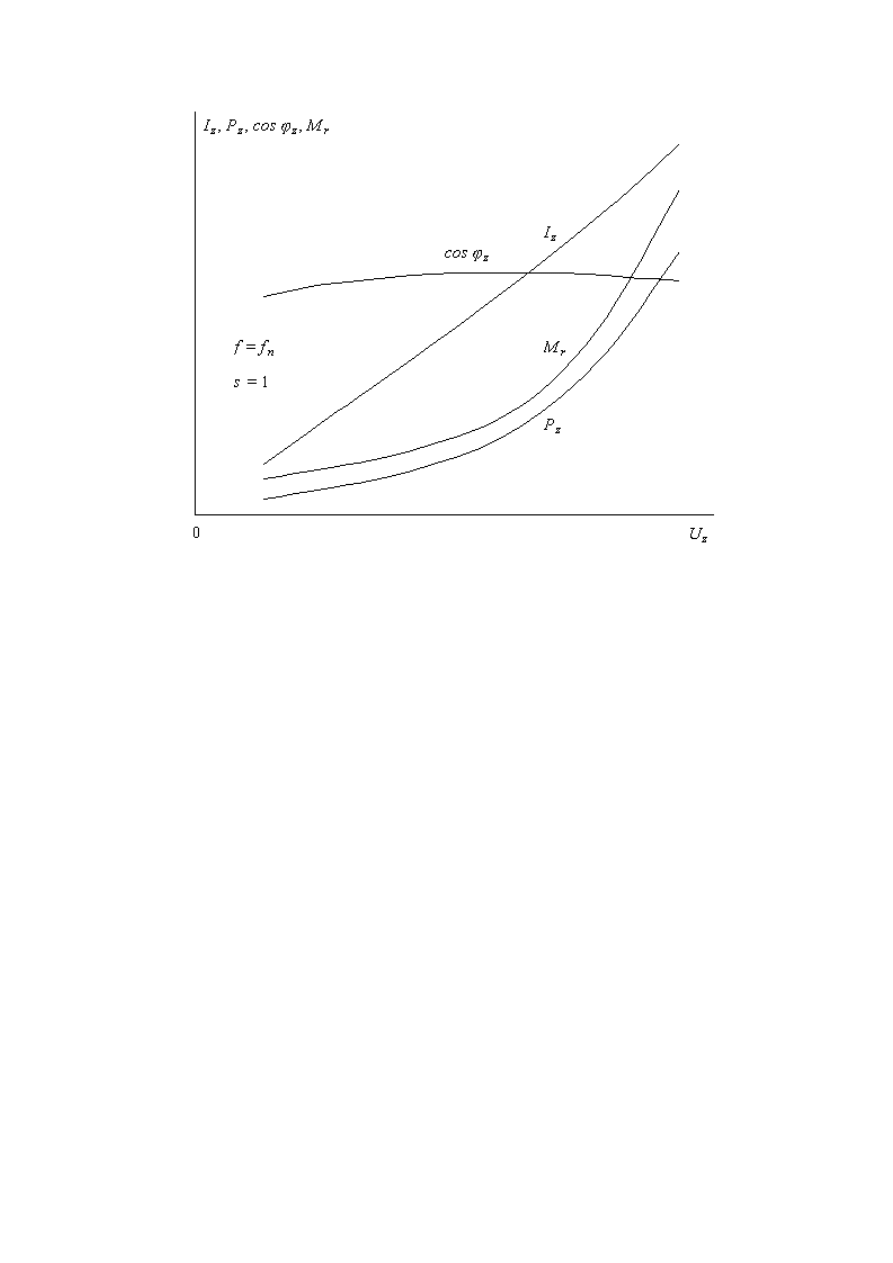
193
Rys. 35.8. Charakterystyki stanu zwarcia
3.6
Pomiar momentu rozruchowego dla różnych impedancji włączonych w obwód
uzwojenia dodatkowego
Aby porównad momenty rozruchowe badanego silnika dla różnych impedancji, włącza się w obwód
uzwojenia rozruchowego (pomocniczego) (zaciski D1, D2) kondensatory o pojemności różnej od
podanej przez wytwórcę, a następnie w miejsce kondensatorów rezystancję regulowaną R. Badania
przeprowadza się np. przez podłączenie do kondensatora stale współpracującego z uzwojeniem
rozruchowym (pomocniczym) szeregowo lub równolegle dodatkowego kondensatora; wartośd
rezystancji dodatkowej włączonej w miejsce kondensatorów dobiera się doświadczalnie tak, aby przy
obniżonym napięciu wytwarzany moment rozruchowy był największy.
Układ pomiarowy, przedstawiony na rys. 35.6, jest identyczny jak podczas pomiarów charakterystyk
zwarcia. Pomiary przeprowadza się dla tego położenia wirnika, w którym podczas próby zwarcia
moment rozruchowy był najmniejszy. Zmniejszając napięcie zasilania od wartości, przy której prąd
zwarcia wynosi ok. 1,2·I
n
do zera, mierzy się wartośd momentu rozruchowego M
r
. Podczas pomiarów
kontroluje się wartośd napięcia U
c
i w razie konieczności ogranicza wartośd napięcia zasilającego tak,
aby nie przekroczyd na kondensatorze wartości dopuszczalnej. Otrzymane wyniki pomiarów należy
zestawid w tabeli 35.4.
194
Tabela 35.4
Lp.
C
1
C
2
R
d
Uwagi
U
z
I
z
M
r
U
z
I
z
M
r
U
z
I
z
M
r
V
A
N·m
V
A
N·m
V
A
N·m
C
1
=
C
2
=
R =
Na podstawie otrzymanych wyników dla każdego z wariantów przelicza się wartości prądów i
momentów na napięcie znamionowe oraz wykreśla zależności M
r
= f(U
z
) i I
z
= f(U
z
) dla wszystkich
układów połączeo uzwojenia dodatkowego (łącznie z wynikami otrzymanymi podczas pomiarów
stanu zwarcia).
3.7
Wyznaczanie charakterystyk obciążenia
Charakterystykami obciążenia są zależności natężenia prądu, prędkości obrotowej, mocy pobieranej,
współczynnika mocy, momentu obrotowego i sprawności od mocy oddawanej na wale przy
znamionowych wartościach napięcia i częstotliwości (I, n, P
1
, cos
, M,
= f(P
2
) przy U = U
n
, f = f
n
).
Schemat pomiarowy przedstawiono na rys. 35.6, z tym, że badany silnik jest sprzęgnięty z prądnicą
obciążającą. Pomiar charakterystyk obciążenia należy przeprowadzid dla silnika, w którym w obwód
uzwojenia pomocniczego włączony jest kondensator o pojemności zalecanej przez wytwórcę.
Po przeprowadzeniu rozruchu, przy napięciu U = U
n
, obciąża się badany silnik do takiej wartości
momentu, przy której natężenie prądu pobieranego przez silnik wynosi ok. 1,2 I
n
. Pomiary
przeprowadza się podczas zmniejszania obciążenia do zera. Zmierzone wartości prądu pobieranego I,
mocy pobieranej P
1
i prędkości obrotowej n zestawia się w tabeli 35.5.
Tabela 35.5
Lp.
U
I
P
1
n
cos
M
P
2
Uwagi
V
A
W
obr/s
–
N·m
W
–
U = U
n
,
W tabeli 35.5
–
współczynnik mocy
(35.6)
–
moc oddawana przez silnik
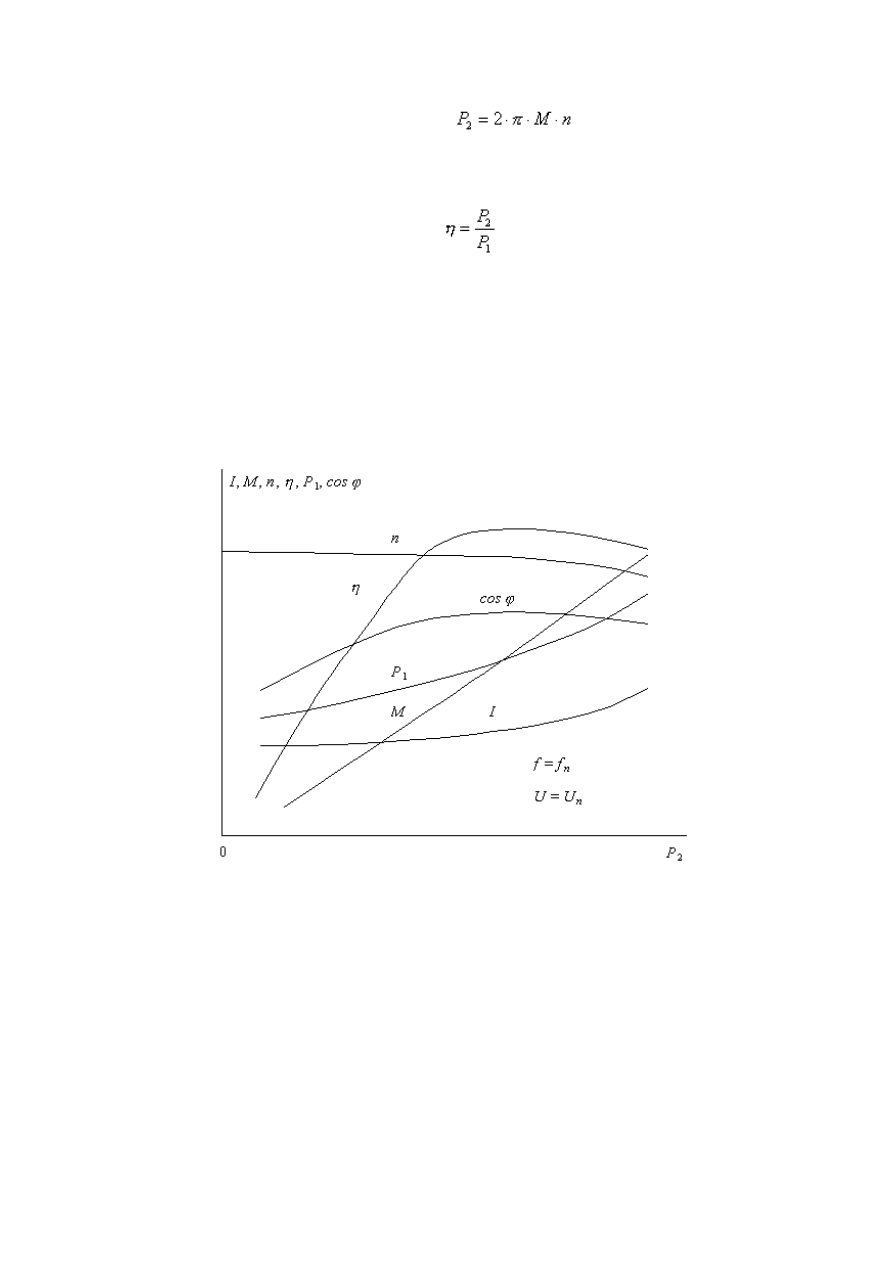
195
(35.7)
–
sprawnośd silnika
(35.8)
Na podstawie przeprowadzonych pomiarów i obliczeo należy wykreślid charakterystyki obciążenia,
których przykładowe przebiegi przedstawiono na rys. 35.9.
Charakterystyki obciążenia pozwalają na analizę zachowania się silnika w czasie pracy. Wartości
poszczególnych parametrów przy P
2
= P
n
odczytane z charakterystyk obciążenia należy porównad z
danymi znamionowymi podanymi przez wytwórcę. Tolerancje wartości podanych na tabliczce
znamionowej określa PN-E-06810:1996.
Rys. 35.9. Charakterystyki obciążenia
4
Opracowanie wyników pomiarów
Sprawozdanie z dwiczenia powinno zawierad:
opracowane tabele pomiarowe i przykładowe obliczenia,
charakterystyki biegu jałowego (I
0
, P
0
, cos
0
= f(U
0
) przy f = f
n
),
charakterystyki stanu zwarcia (M
r
, I
z
, P
z
, cos
z
= f(U
z
) przy s = 1, f = f
n
),
wykresy momentu rozruchowego dla badanych impedancji włączonych w obwód uzwojenia
dodatkowego (łącznie z impedancją „fabryczną”),
charakterystyki obciążenia (I, P
1
, n,
, M, cos
= f(P
2
) przy U = U
n
, f = f
n
),
uwagi i wnioski z uwzględnieniem wymagao PN-E-06810:1996.

196
5
Pytania kontrolne
Uzasadnid brak momentu rozruchowego w silniku jednofazowym, gdy zasilane jest tylko
uzwojenie główne.
Podad warunki uzyskania w silniku jednofazowym pola kołowego.
Omówid i porównad sposoby wykonania uzwojenia rozruchowego.
Narysowad wykres wektorowy silnika jednofazowego z pomocniczym uzwojeniem zwartym.
Który z typów silników jednofazowych jest najbardziej ekonomiczny w eksploatacji i dlaczego?
Dlaczego prąd biegu jałowego silników jednofazowych jest zwykle większy niż prąd biegu
jałowego silników trójfazowych?

197
ĆWICZENIE 41
BADANIE SILNIKA UNIWERSALNEGO
1
Program ćwiczenia
Pomiar charakterystyk prędkości obrotowej n = f(U) przy M = const przy zasilaniu prądem stałym
i przemiennym.
Pomiar charakterystyk elektromechanicznych n,
, cos
, I = f(M) przy U = U
n
przy obydwu
rodzajach zasilania.
Analiza porównawcza otrzymanych wyników pomiarów przy zasilaniu prądem stałym i prądem
przemiennym; porównanie wyników pomiarów z wymaganiami obowiązujących norm.
2
Cel pomiarów
Silnik uniwersalny to komutatorowy silnik szeregowy, który może byd zasilany zarówno napięciem
stałym, jak i przemiennym. Silniki takie, zwykle o mocy ułamkowej (0,5–350W), służą do napędu
narzędzi ręcznych, maszyn biurowych oraz zmechanizowanych urządzeo w gospodarstwie domowym.
Celem dwiczenia jest przeprowadzenie pomiarów wybranych z pełnej próby silników uniwersalnych
przewidzianych w normie. Wybór pomiarów, podyktowany względami dydaktyki, głównie obejmuje
te punkty, które pozwolą na bliższe poznanie budowy, zasady działania oraz możliwości
eksploatacyjnych silników. Szczególnie interesujące w dwiczeniu jest porównanie właściwości silnika
zasilanego prądem stałym i prądem przemiennym.
Wyniki pomiarów należy uznad za dodatnie, jeżeli wyznaczone na ich podstawie parametry
silnika badanego będą zgodne z podanymi na tabliczce znamionowej i w karcie katalogowej.
Dopuszczalne odchyłki poszczególnych parametrów nie powinny byd większe niż to precyzują
normy.
3
Omówienie programu ćwiczenia
3.1
Budowa i zasada działania silnika uniwersalnego
Silnik uniwersalny działa identycznie jak silnik szeregowy prądu stałego. Jeżeli bowiem w silniku
szeregowym prądu stałego zmienid biegunowośd napięcia zasilającego, to jednocześnie zmieni się
kierunek prądu twornika i kierunek strumienia głównego, zatem kierunek momentu obrotowego nie
ulegnie zmianie. W silniku takim, zasilanym napięciem przemiennym, prąd zmienia się periodycznie,
równocześnie w uzwojeniu twornika i uzwojeniu wzbudzenia, zatem kierunek działania momentu
pozostaje nie zmieniony. Kierunek ten zależy jedynie od wzajemnego połączenia początków i kooców
obydwu uzwojeo silnika.
Różnica konstrukcyjna między zwykłym silnikiem szeregowym prądu stałego a silnikiem
uniwersalnym polega na tym, że zarówno wirnik, jak i obwód magnetyczny stojana są wykonane w
całości z blach magnetycznych, aby straty w żelazie pod wpływem zmiennego strumienia
magnetycznego były jak najmniejsze.
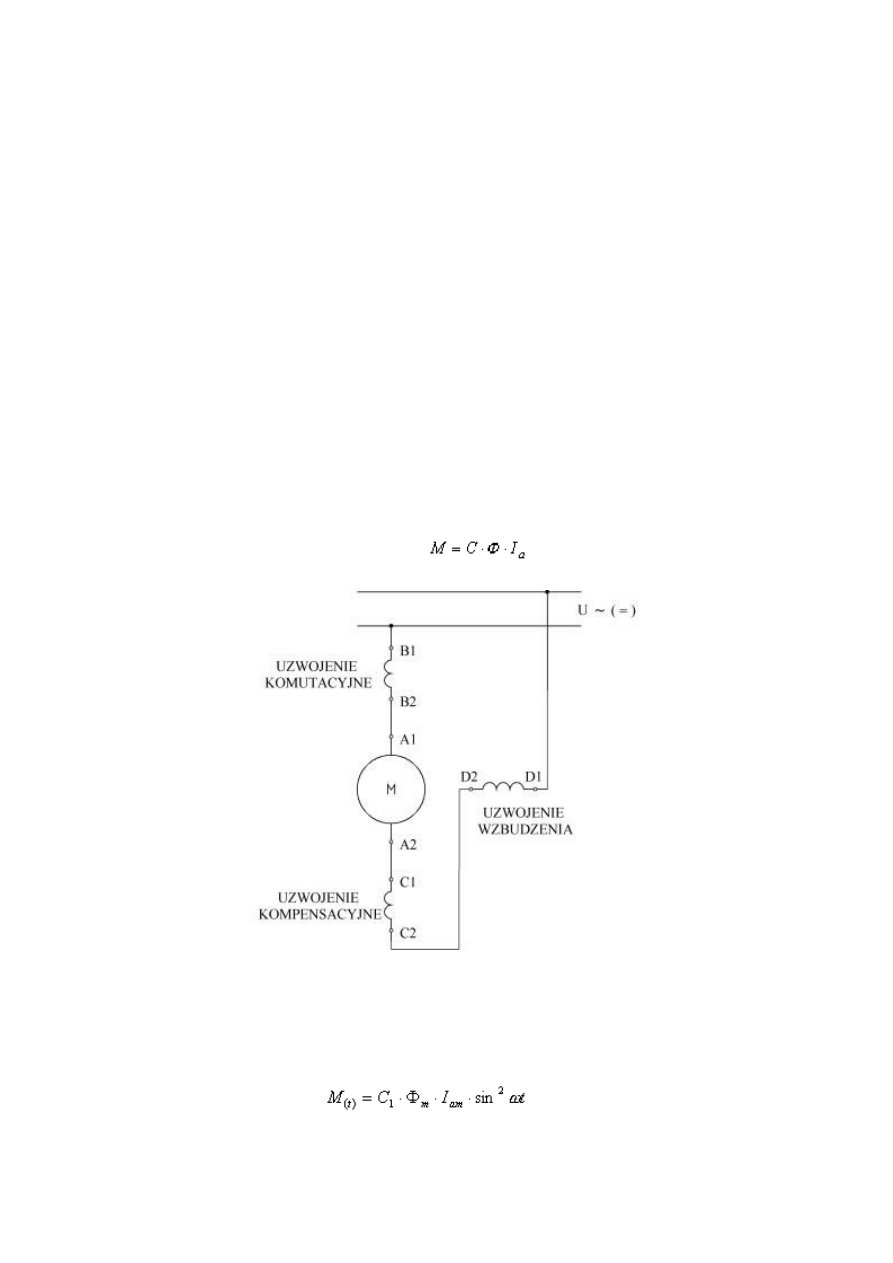
198
Twornik silnika ma najczęściej uzwojenie pętlicowe proste. W żłobkach nabiegunników maszyn o
większych mocach umieszczone jest uzwojenie kompensacyjne, a między biegunami głównymi –
bieguny komutacyjne (rys. 41.1). Ponieważ strumieo oddziaływania twornika jest strumieniem
przemiennym, uzwojenie kompensacyjne nie musi byd galwanicznie połączone z uzwojeniem
twornika. Może ono byd zamknięte i działad jak uzwojenie wtórne transformatora w stanie zwarcia.
Jednak, ze względu na istnienie strumieni rozproszenia, strumieo oddziaływania twornika nie może
byd tą metodą skompensowany w całości.
W silnikach mocy ułamkowej nie wykonuje się uzwojeo kompensacyjnych i komutacyjnych. Poprawę
warunków komutacji uzyskuje się przez pewne zabiegi konstrukcyjne, takie jak zmniejszenie napięcia
między sąsiednimi działkami komutatora (zwiększenie liczby działek komutatora) oraz dobranie
odpowiedniego materiału na szczotki.
Jeżeli silnik pracuje ze stałym prądem obciążenia, złagodzenie warunków komutacji można uzyskad
przez odpowiednie wysunięcie szczotek ze strefy neutralnej. Należy jednak pamiętad, że w takim
przypadku silnik nie może pracowad nawrotnie.
Silnik szeregowy zasilany prądem stałym rozwija stały w czasie moment obrotowy
(41.1)
Rys. 41.1. Schemat połączeo uzwojeo silnika uniwersalnego
Przy zasilaniu prądem przemiennym moment obrotowy zmienia się w czasie. Jeżeli założyd, że prąd
twornika i strumieo główny są w fazie, to wartośd chwilowa momentu wyniesie
(41.2)
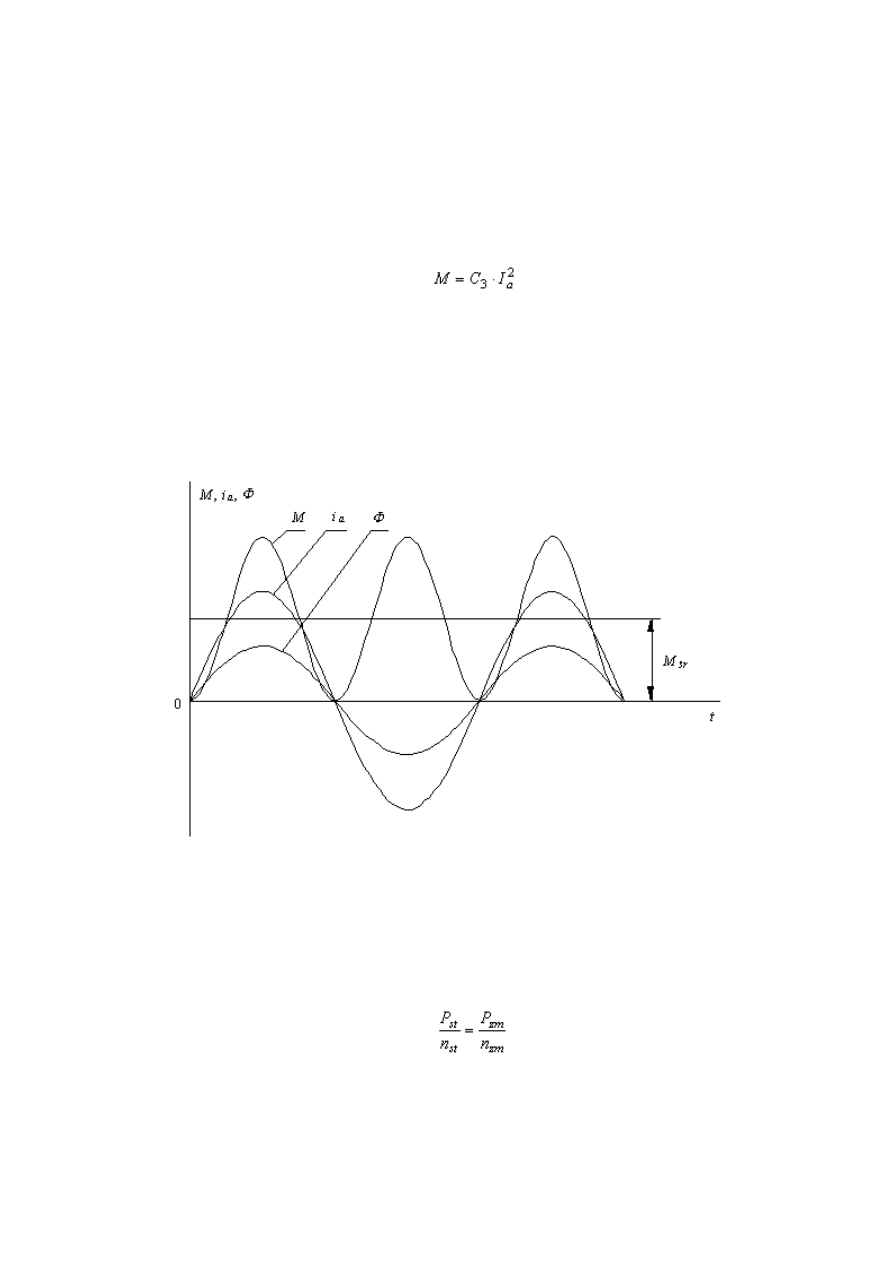
199
gdzie
m
, I
am
– odpowiednio maksymalne wartości strumienia głównego i prądu twornika.
Zatem moment obrotowy, mimo zmian swojej wartości w czasie, nie zmienia kierunku (rys. 41.2).
Jeśli założyd brak nasycenia obwodu magnetycznego, średnia wartośd momentu na wale silnika, po
podstawieniu
= C
2
· I
a
, wyniesie
(41.3)
Charakter tej zależności jest więc identyczny jak dla silników szeregowych prądu stałego.
Podczas rozruchu, gdy n = 0, strumieo główny i prąd wirnika nie są w fazie, gdyż uzwojenie
wzbudzenia tworzy ze zwartymi przez szczotki zezwojami transformator, obciążony rezystancją oraz
reaktancją rozproszenia obwodu. Przesunięcie to jest jednak niewielkie, toteż moment średni jest
nadal różny od zera.
Rys. 41.2. Przebiegi prądu, strumienia magnetycznego i momentu obrotowego w funkcji czasu
Jeżeli pominąd straty w silniku i założyd, że ma on dostarczyd taki sam moment obrotowy przy
zasilaniu prądem stałym i przemiennym, to można napisad
(41.4)
gdzie: P
st
, P
zm
– moc silnika, zasilanego odpowiednio prądem stałym i przemiennym,
n
st
, n
zm
– prędkośd obrotowa silnika, zasilanego odpowiednio prądem stałym i
przemiennym.
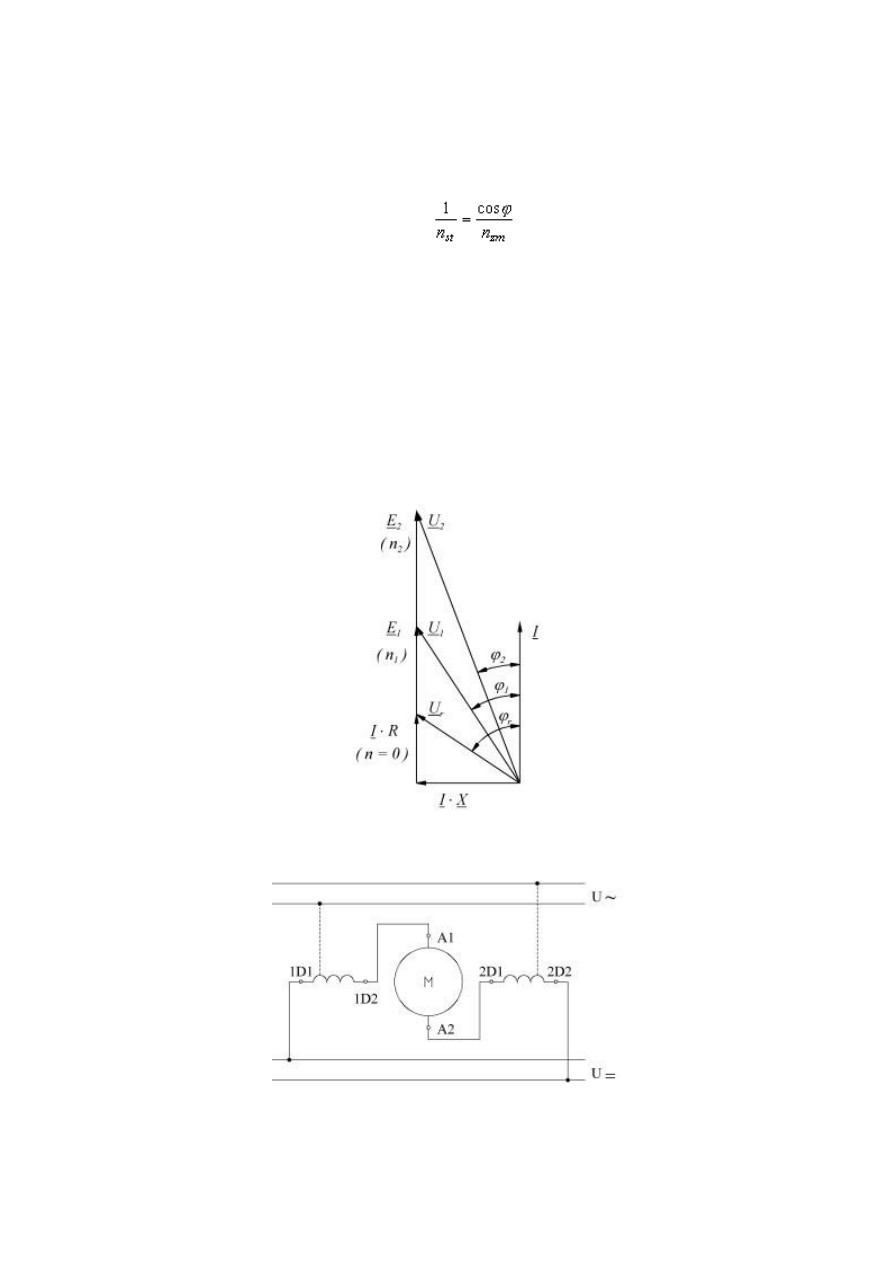
200
Ponieważ w obydwu przypadkach silnik przewidziany jest na taką samą wartośd napięcia pracy, a
wartośd skuteczna prądu przemiennego, ze względu na nagrzewanie się uzwojeo, powinna byd równa
prądowi stałemu, wyrażenie (41.4) przybierze postad
(41.5)
Z zależności tej wynika, że prędkośd obrotowa przy prądzie przemiennym będzie tym bliższa
prędkości przy prądzie stałym, im współczynnik mocy cos będzie bliższy jedności. Z wykresu
wektorowego maszyny szeregowej zasilanej prądem przemiennym (rys. 41.3) widad, że kąt
jest tym
mniejszy, im większa jest prędkośd obrotowa silnika. Dlatego silniki te budowane są zazwyczaj na
duże prędkości obrotowe. Współczynnik mocy nowoczesnych silników przekracza dla napięcia
znamionowego wartośd 0,9. W silnikach o niższej prędkości obrotowej (poniżej 150 obr/s) zasilanych
prądem przemiennym zmniejsza się, w celu uzyskania podobnych charakterystyk roboczych, liczbę
zwojów uzwojenia wzbudzenia (rys. 41.4). Symetryczne rozmieszczenie połówek uzwojenia
wzbudzenia po obydwu stronach twornika zmniejsza zakłócenia radioelektryczne.
Rys. 41.3. Wykres wektorowy silnika uniwersalnego przy różnych prędkościach obrotowych
Rys. 41.4. Sposoby połączenia silnika uniwersalnego do sieci prądu stałego i przemiennego.
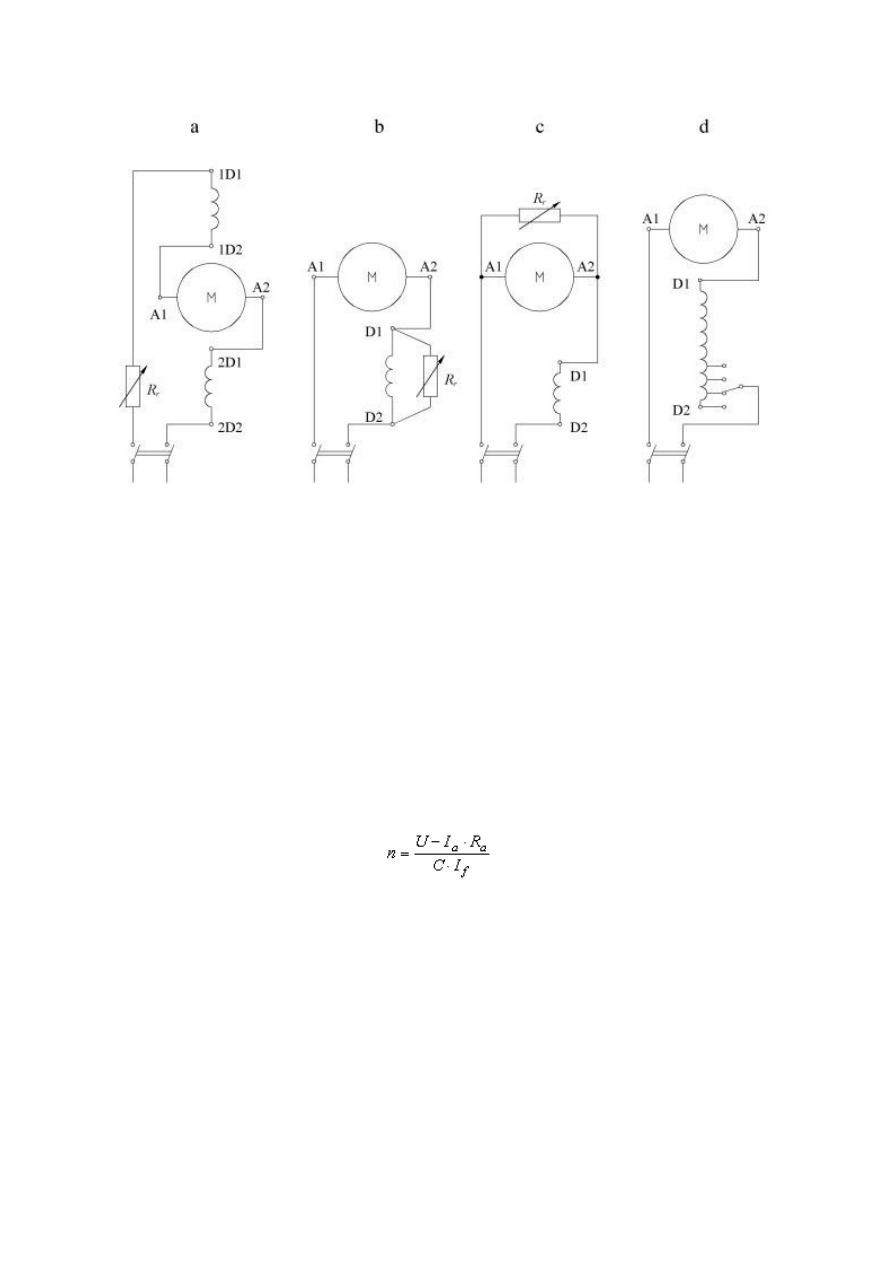
201
Rys. 41.5. Sposoby regulacji prędkości obrotowej silnika
Rozruch dużych silników przeprowadza się przy obniżonym napięciu. Zwykle prąd rozruchowy
nastawia się powyżej wartości znamionowej. Małe silniki są najczęściej uruchamiane przez
bezpośrednie włączenie na napięcie znamionowe.
Regulacja prędkości obrotowej może się odbywad przez zmianę:
napięcia zasilającego (rys. 4l.5a),
prądu wzbudzenia (bocznikowanie uzwojenia wzbudzenia, rys. 41.5b),
prądu twornika (bocznikowanie obwodu twornika, rys. 41.5c),
liczby zwojów uzwojenia wzbudzenia (rys. 41.5d).
Jeśli silnik o liniowym obwodzie magnetycznym jest zasilany prądem stałym, to zależnośd prędkości
obrotowej n od jego poszczególnych parametrów można wyrazid wzorem
(41.6)
w którym: U – napięcie zasilające,
I
a
– prąd twornika,
I
f
– prąd wzbudzenia,
R
a
– suma rezystancji uzwojeo obwodu twornika,
C – stała.
Dla przypadku zasilan
202
ia prądem przemiennym zależnośd ta przybiera postad
(41.7)
gdzie: X
ac
– wypadkowa reaktancja uzwojeo połączonych szeregowo.
Na reaktancję X
ac
składają się reaktancje uzwojeo: wzbudzenia, twornika, kompensacyjnego i
komutacyjnego. Należy zwrócid uwagę, że X
ac
nie jest zwykłą sumą poszczególnych reaktancji
wyznaczanych oddzielnie, lecz reaktancją wynikową (mierzoną wspólnie), gdyż strumienie
magnetyczne odpowiadające poszczególnym reaktancjom w znacznym stopniu się znoszą. W
silnikach mocy ułamkowej, ze względu na brak uzwojeo komutacyjnych i kompensacyjnych,
reaktancja ta jest dośd duża.
Ze wzorów (41.3), (41.6) i (41.7) wynika, że gdy moment obciążenia jest stały (M = const), zależnośd
n = f(U) ma charakter prostoliniowy (rys. 41.6). Jeżeli natomiast przy stałym napięciu zasilania
zmieniad obciążenie silnika, to prędkośd obrotowa zmienia się jak na rys. 41.7, na którym
przedstawiono przykładowe charakterystyki n = f(M) przy zasilaniu prądem przemiennym. Przy
zasilaniu prądem stałym, charakterystyki te mają przebieg bardziej zbliżony do hiperboli.
Z krzywych n = f(M) widad, że silnik nie obciążony ma tendencję do zwiększania prędkości obrotowej
ponad dopuszczalną wartośd. Dlatego silniki te nie powinny byd uruchamiane bez obciążenia na wale,
gdyż może to doprowadzid do ich uszkodzenia.
3.2
Pomiar charakterystyk n = f(U) przy M = const
Charakterystyki n = f(U), zwane charakterystykami prędkości obrotowej, zostaną wykonane dla
dwóch wartości momentu na wale: M = M
n
i M = 0,5·M
n
, przy zasilaniu prądem stałym i prądem
przemiennym. Schemat połączeo układu pomiarowego dla prądu stałego przedstawiono na rys.
41.8a, a dla prądu przemiennego na rys. 41.8b. Obciążeniem silnika jest hamulec elektromaszynowy.
Pomiary przeprowadza się, regulując napięcie zasilające w granicach od 1,1·U
n
do takiej wartości,
przy której możliwe jest jeszcze utrzymywanie stałego (zadanego) momentu za pomocą maszyny
hamulcowej. W tym zakresie, należy wykonad 5–7 pomiarów dla każdej charakterystyki, odczytując
wartośd napięcia zasilającego U, prędkośd obrotową silnika n, prąd pobierany I oraz moc P
1
(przy
zasilaniu prądem przemiennym). Wyniki pomiarów należy zestawid w tabeli 41.1.
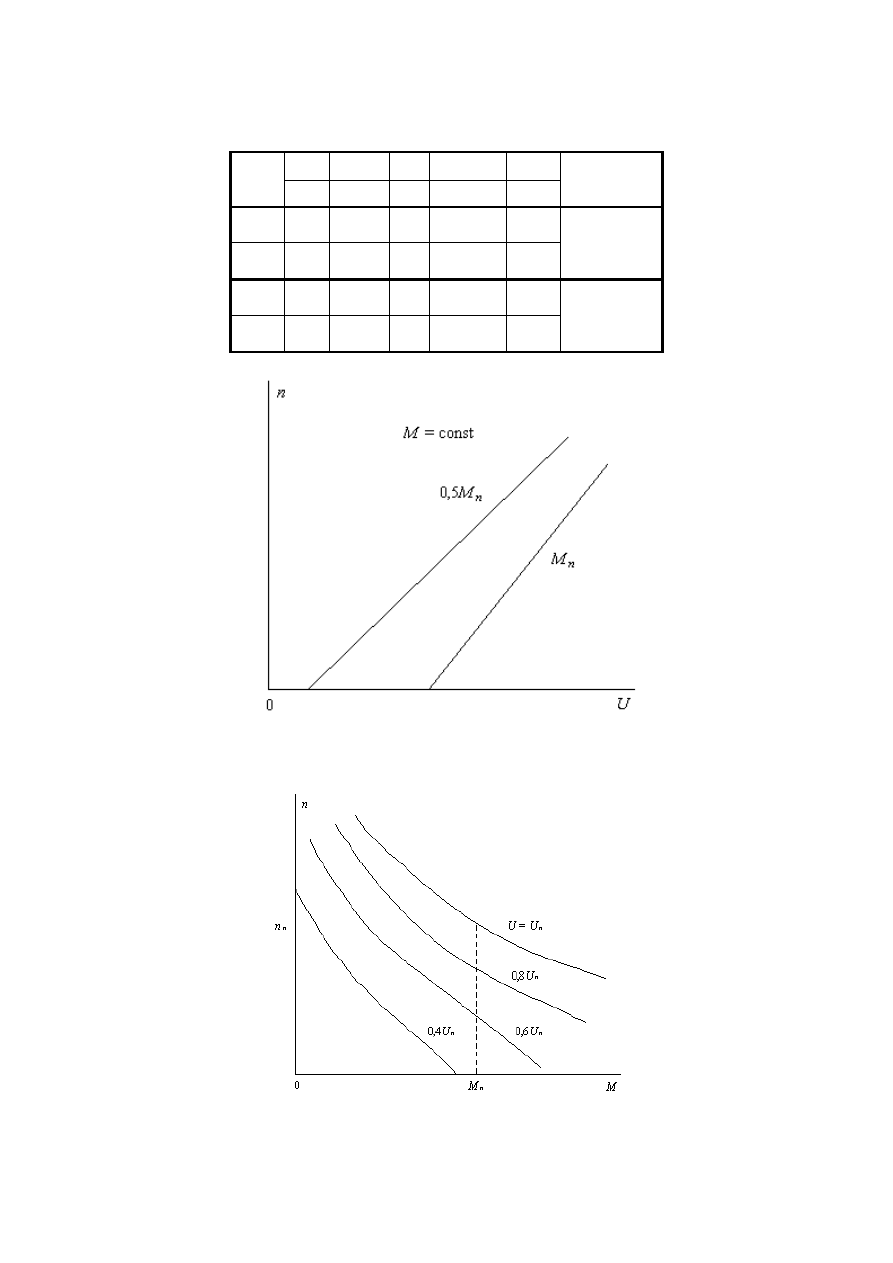
203
Tabela 41.1
Lp.
U
n
I
M
P
1
Uwagi
V
obr/s
A
N·m
W
1...5
M
n
napięcie stałe
1...5
0,5·M
n
1...5
M
n
napięcie
przemienne
1...5
0,5·M
n
Rys. 41.6. Charakterystyki n = f(U) przy M = const
Rys. 41.7. Charakterystyki n = f(M) przy U = const
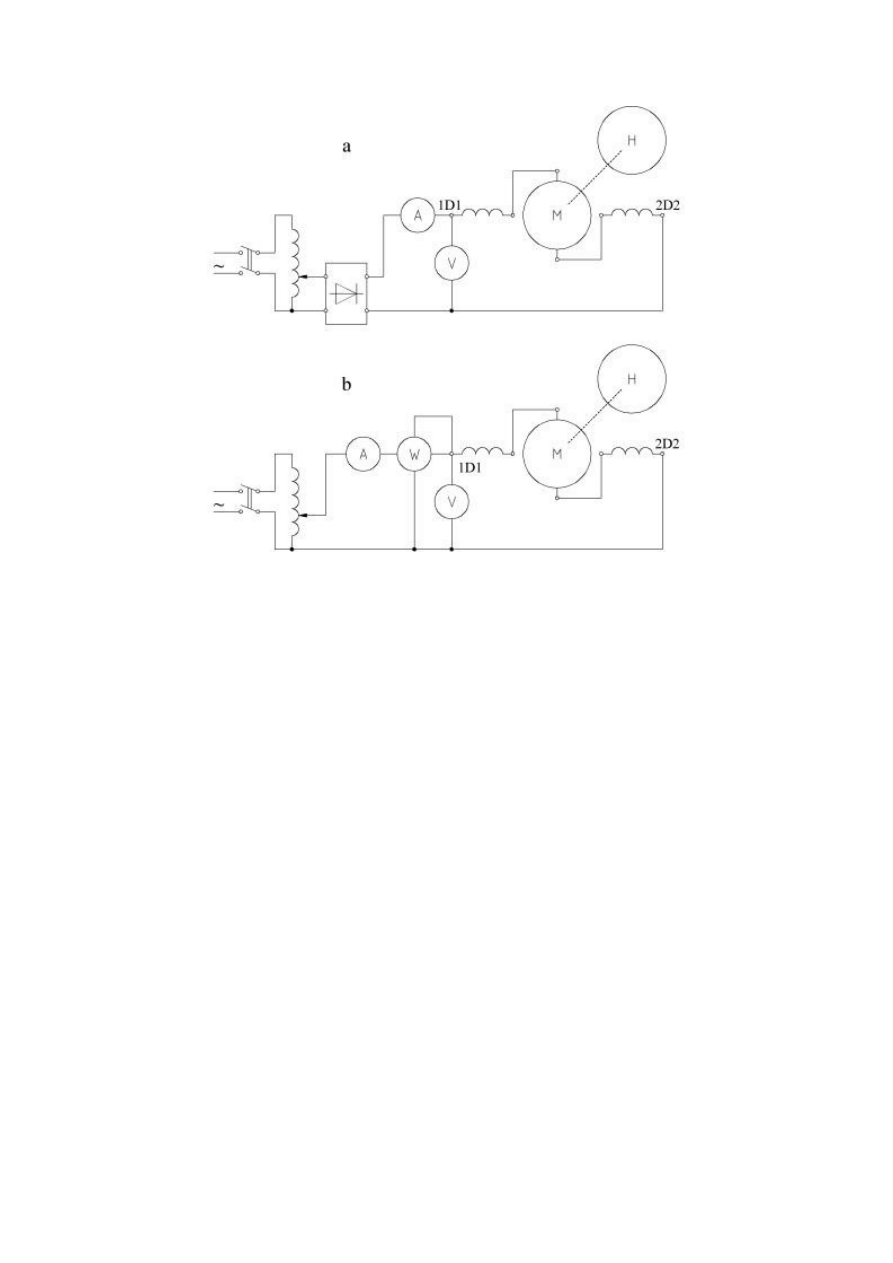
204
Rys. 41.8. Układ pomiarowy do wyznaczania charakterystyk silnika; a) zasilanego prądem stałym,
b) prądem przemiennym
Przy zasilaniu prądem stałym P
1
= U·I, natomiast przy zasilaniu prądem przemiennym P
1
jest
odczytywane na watomierzu.
Na podstawie wyników pomiarów należy wykreślid charakterystyki n = f(U), dla obydwu rodzajów
napięd na wspólnym wykresie (rys. 41.6).
3.3
Pomiar charakterystyk elektromechanicznych
Charakterystyki elektromechaniczne silnika to zależności n, I,
, cos
= f(M) przy U = const. Ich
wyznaczanie odbywad się będzie w tym samym układzie pomiarowym jak w p. 41.3.2. Przed
właściwym pomiarem silnik należy obciążyd mocą znamionową przez 10–15 min, aby wszystkie jego
części osiągnęły temperaturę pracy.
Przy stałej wartości napięcia zasilającego równej wartości znamionowej należy odciążad silnik w
zakresie od 1,1·I
n
do takiej wartości prądu, przy której prędkośd obrotowa nie przekracza 1,8·n
n
. W
czasie pomiarów odczytuje się wartości prądu silnika, mocy pobieranej, prędkości obrotowej oraz
momentu na wale. Pomiary należy wykonad zarówno dla zasilania prądem stałym, jak i przemiennym.
Wyniki należy zestawid w tabeli 41.2.
205
Tabela 41.2
Lp.
Rodzaj
napięcia
U
I
n
M
P
1
P
2
cos
Uwagi
V
A
obr/s
N·m
W
W
–
–
stałe
przemienne
W powyższej tabeli:
–
moc na wale
(41.8)
–
współczynnik mocy
(41.9)
–
sprawnośd silnika
(41.10)
Na podstawie wyników pomiarów i obliczeo należy narysowad dla obydwu rodzajów napięd
charakterystyki elektromechaniczne, zestawiając odpowiadające sobie krzywe na wspólnych
arkuszach. Typowe przebiegi wyznaczanych charakterystyk przedstawiono na rys. 41.9. Krzywe „a” na
tym rysunku odpowiadają zasilaniu prądem stałym, a krzywe „b” – prądem przemiennym.
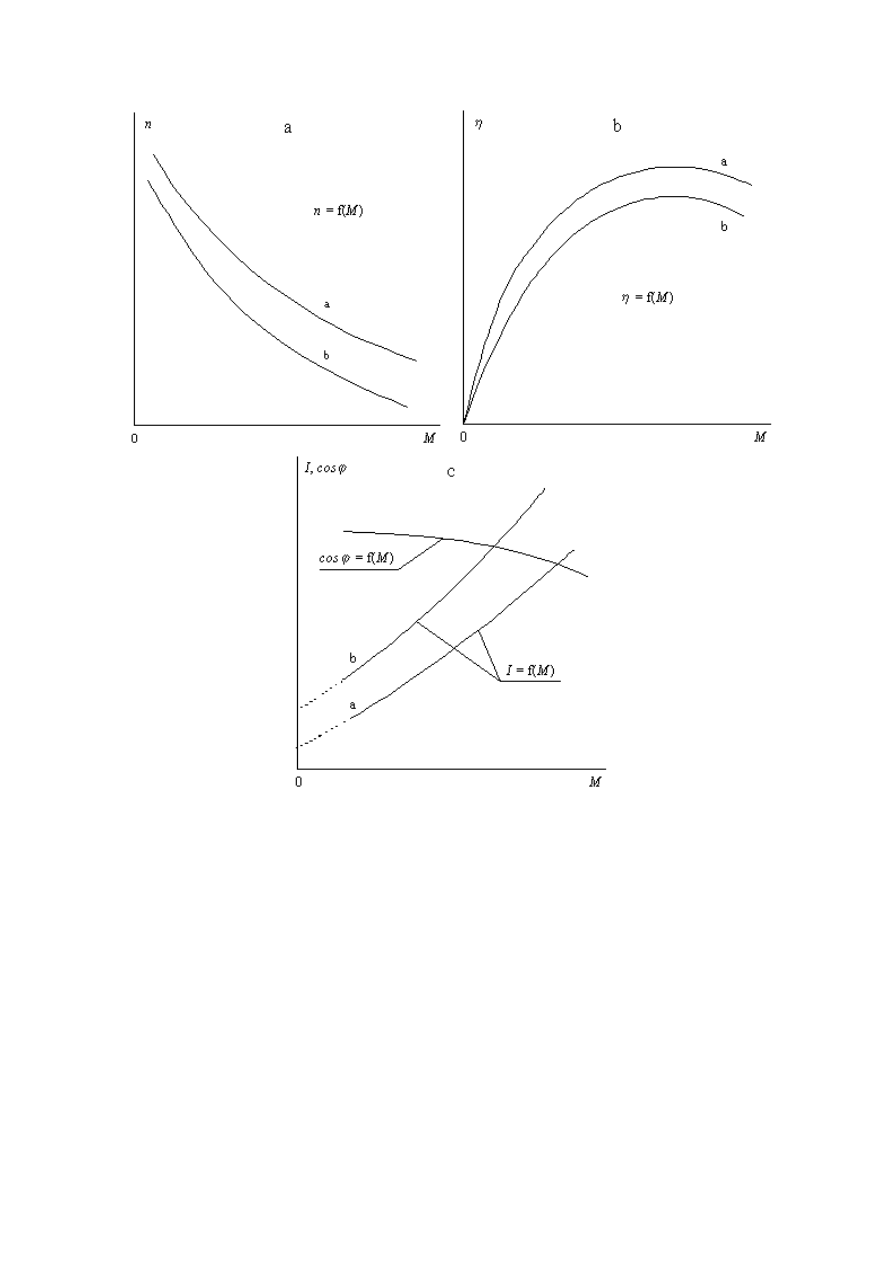
206
Rys. 41.9. Charakterystyki elektromechaniczne silnika: a) n = f(M), b)
= f(M), c) I, cos
= f(M)
Z porównania charakterystyk wynika, że silnik przy zasilaniu prądem stałym ma korzystniejsze
parametry eksploatacyjne niż przy zasilaniu prądem przemiennym. Większa jest przy tym samym
obciążeniu sprawnośd silnika i prędkośd obrotowa, lepsze są warunki komutacji. Jeżeli charakterystyki
mechaniczne n = f(M) przy obydwu rodzajach zasilania zbyt się różnią, pewną poprawę można
uzyskad przez zmniejszenie liczby zwojów uzwojenia wzbudzenia przy zasilaniu prądem przemiennym
(rys. 41.4).
Na podstawie charakterystyk należy wyznaczyd znamionowe wartości sprawności, prędkości
obrotowej i współczynnika mocy, a następnie obliczyd różnice między tymi parametrami i podanymi
przez producenta na tabliczce znamionowej. Różnice te nie powinny byd większe niż podane w p.
41.2.

207
4
Sprawozdanie z ćwiczenia
Sprawozdanie z dwiczenia powinno zawierad:
opracowany protokół z pomiarów,
charakterystyki n = f(U) przy M
n
i 0,5·M
n
dla prądu stałego i przemiennego,
charakterystyki elektromechaniczne: n,
, cos
, I = f(M) przy U = U
n
dla prądu stałego i
przemiennego,
porównanie otrzymanych wyników z podanymi przez producenta i z wymaganiami norm.
uwagi i wnioski.
5 Pytania
Jak wpłynie na pracę silnika szeregowego prądu stałego zmiana biegunowości napięcia
zasilającego?
Na czym polega różnica w konstrukcji silnika szeregowego prądu stałego i silnika uniwersalnego?
Czy silnik bocznikowy mógłby pracowad przy zasilaniu napięciem przemiennym?
Dlaczego silniki uniwersalne są wykonywane jako silniki wysokoobrotowe?
W jaki sposób można osiągnąd zbliżony kształt charakterystyk mechanicznych przy zasilaniu
silnika uniwersalnego prądem stałym i prądem przemiennym?
Opisad rozruch silnika uniwersalnego.
Podad sposoby regulacji prędkości obrotowej silnika uniwersalnego.
Dlaczego silnik uniwersalny nie powinien pracowad bez obciążenia?
Podad przykłady zastosowao silników uniwersalnych.

208
ĆWICZENIE 42
SILNIK KOMUTATOROWY PRĄDU PRZEMIENNEGO TYPU SCHRAGE–
RICHTERA
1
Program ćwiczenia
Oględziny, poznanie budowy silnika.
Pomiar charakterystyk biegu jałowego.
Pomiar charakterystyk obciążenia.
Pomiar początkowych wartości momentu rozruchowego.
2
Cel pomiarów
Silnik Schrage-Richtera jest 3-fazowym silnikiem komutatorowym prądu przemiennego. W
odróżnieniu od silników indukcyjnych i synchronicznych silnik ten ma możliwośd łatwej i
ekonomicznej regulacji prędkości obrotowej w dośd szerokim zakresie. Jego wadą jest stosunkowo
duży koszt, duże wymiary i mała pewnośd ruchowa, co związane jest ze skomplikowaną konstrukcją.
Notowany w ostatnich latach duży postęp w rozwoju energoelektronicznych przetworników
częstotliwości stosowanych w układach regulacji prędkości obrotowej silników prądu przemiennego
znacznie ograniczył przemysłowe zastosowanie silnika Schrage-Richtera. Jest on jednak nadal
przydatny w dydaktyce i bardzo interesujący z punktu widzenia teorii maszyn elektrycznych, gdyż
stanowi syntezę kilku rodzajów maszyn: indukcyjnej, synchronicznej oraz przetwornicy częstotliwości.
Silnik ten jest praktyczną ilustracją uogólnionej teorii maszyn i dlatego jest często omawiany przy
nauczaniu maszyn elektrycznych.
Celem dwiczenia jest poznanie szczegółów konstrukcyjnych, zasady działania oraz właściwości
eksploatacyjnych silnika na podstawie oględzin i wyznaczonych wybranych charakterystyk. Będzie to
stanowiło podstawę do analizy porównawczej silnika Schrage-Richtera z innymi znanymi typami
silników.
3
Omówienie programu ćwiczenia
3.1
Zasada działania silnika Schrage-Richtera
Budowa silnika Schrage-Richtera przedstawiono schematycznie na rys. 42.1. Jest on zasilany
napięciem trójfazowym od strony wirnika, za pośrednictwem pierścieni ślizgowych. Napięcie
zasilające jest podawane na uzwojenie W
1
rozłożone w żłobkach wirnika i wytwarzające wirujące pole
magnetyczne. W żłobkach wirnika znajduje się również drugie uzwojenie W
2
, które jest połączone z
działkami komutatora znajdującego się na wale maszyny. W żłobkach rdzenia stojana silnika jest
umieszczone uzwojenie W
3
składające się z trzech symetrycznie rozmieszczonych części, których
początki i kooce są połączone ze szczotkami współpracującymi z komutatorem. Odpowiadające sobie
szczotki (połączone z początkami lub koocami poszczególnych części uzwojenia W
3
) są względem
siebie nieruchome i przesunięte na obwodzie komutatora o kąt 120°. Szczotki znajdują się w
specjalnych trzymadłach, pozwalających na przesuwanie ich po obwodzie w taki sposób, że gdy
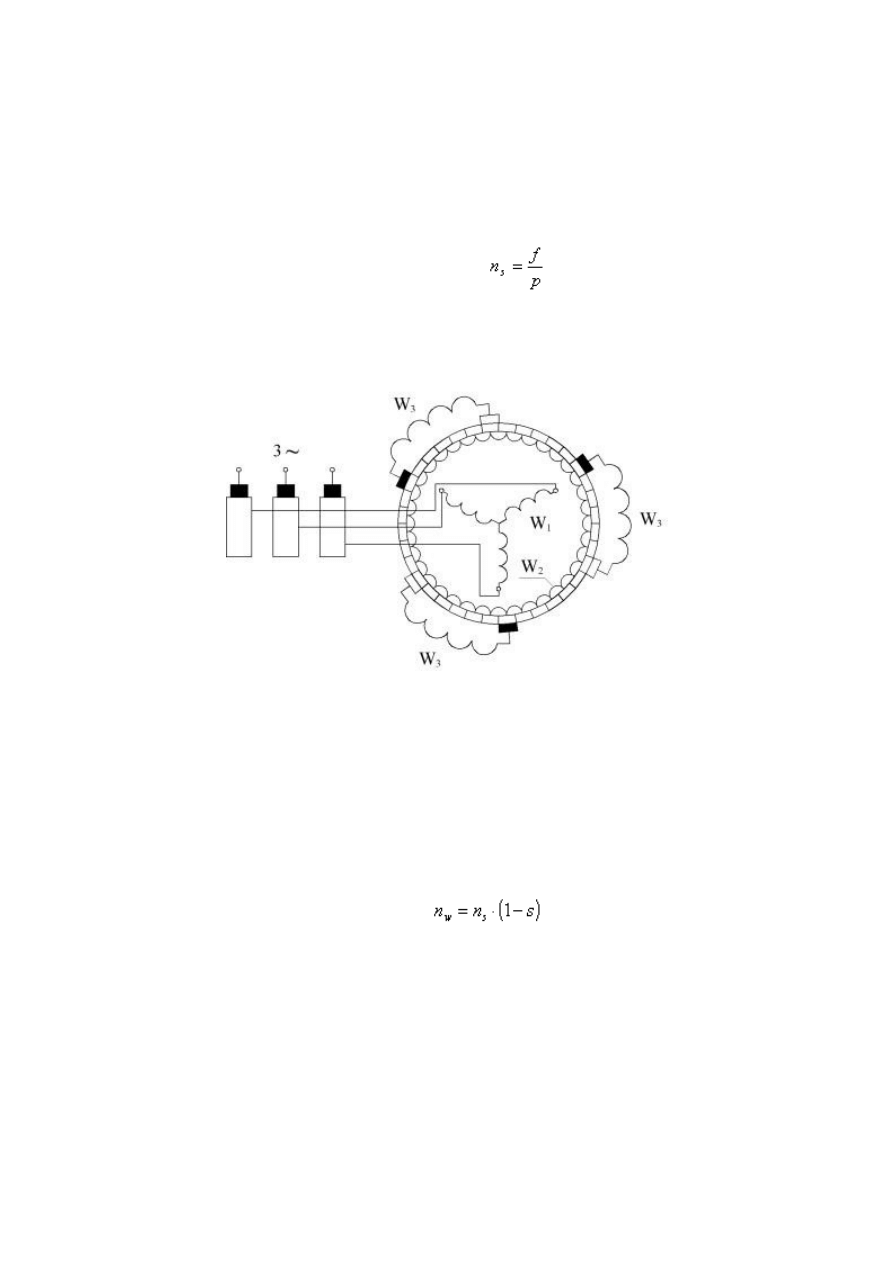
209
szczotki odpowiadające początkom uzwojeo przesuwają się np. w lewo, wtedy szczotki połączone z
koocami uzwojeo przesuwają się o taki sam kąt w prawo. Szczotki stanowiące parę (należące do tego
samego uzwojenia) są przesunięte względem siebie na powierzchni komutatora w kierunku osiowym,
dzięki czemu podczas przesuwania mogą się mijad. Strumieo magnetyczny wytwarzany przez
uzwojenie W
1
wiruje względem wirnika z prędkością obrotową
(42.1)
gdzie: f – częstotliwośd napięcia zasilającego,
p – liczba par biegunów uzwojenia.
Rys. 42.1. Schemat połączeo uzwojeo silnika Schrage-Richtera
Wirujące pole magnetyczne przecina pręty pozostałych uzwojeo, indukując w nich siły
elektromotoryczne. SEM indukowana w poszczególnych częściach uzwojenia W
3
powoduje przepływ
prądu, gdyż są one zamknięte poprzez komutator i uzwojenie W
2
. Zatem, podobnie jak w silniku
indukcyjnym, między stojanem a wirnikiem powstaje moment obrotowy usiłujący obrócid stojan w
kierunku wirowania pola wirnika. Stojan nie ma możliwości wirowania, wobec tego wirnik zacznie się
obracad w kierunku przeciwnym do kierunku wirowania własnego pola z prędkością
(42.2)
gdzie: s – poślizg silnika.
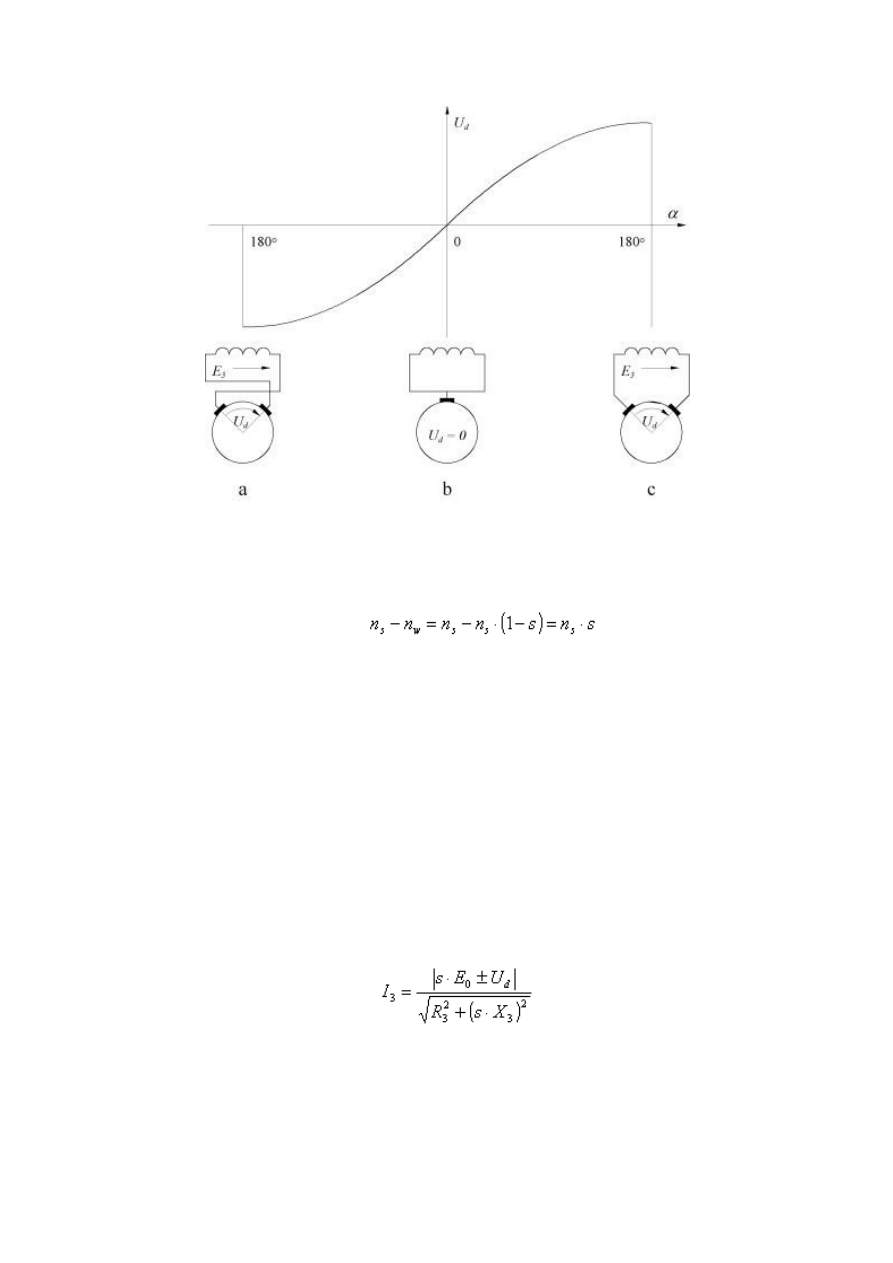
210
Rys. 42.2. Zależnośd napięcia dodawczego od kąta rozsunięcia szczotek
Prędkośd obrotowa pola wirnika względem stojana wyniesie:
(42.3)
Częstotliwośd SEM E
3
indukowanej w uzwojeniu stojana wyniesie s·f. W uzwojeniu W
2
umieszczonym
na wirniku indukuje się SEM E
2
o częstotliwości napięcia zasilającego f, gdyż jest ono nieruchome
względem uzwojenia W
1
. Na szczotkach komutatora natomiast pojawia się napięcie o częstotliwości
s·f, gdyż komutator wiruje z prędkością wyrażoną zależnością (42.2). Wobec tego napięcie U
d
między
szczotkami, pochodzące z uzwojenia W
2
, ma taką samą częstotliwośd jak SEM stojana E
3
. Wartośd
napięcia U
d
zależy od liczby działek komutatora znajdujących się między szczotkami, a więc od kąta
rozsunięcia szczotek (rys. 42.2).
Jeżeli oś symetrii uzwojenia W
3
pokrywa się z osią symetrii danej pary szczotek, to napięcie U
d
jest w
fazie z SEM E
3
lub jest przesunięte względem niej o 180°, a więc można te wielkości sumowad
algebraicznie. Oznaczając SEM E
3
indukowaną w uzwojeniu stojana przy nieruchomym wirniku jako E
0
prąd w tym uzwojeniu można wyliczyd z zależności
(42.4)
w której: R
3
, X
3
– odpowiednio rezystancja i reaktancja uzwojenia stojana.
Z rys. 42.2 wynika, że znak „+” w liczniku tej zależności odpowiada przypadkowi, gdy szczotki są
„skrzyżowane”, gdyż kierunki E
3
i U
d
są wtedy zgodne. Przy założeniu stałego momentu obciążenia
211
prąd I
3
jest również stały. Jak widad ze wzoru (42.4), poślizg silnika, a zatem i jego prędkośd
obrotowa, zależą od wartości dodatkowego napięcia U
d
wprowadzanego w obwód stojana. Jeżeli
szczotki znajdują się na tych samych działkach komutatora (
= 0), to napięcie U
d
= 0. Silnik działa
wtedy jak zwykły silnik indukcyjny. Ponieważ napięcie może zmieniad znak, jest możliwośd zmiany
prędkości obrotowej zarówno w dół, jak i w górę. Jeżeli rozsunąd szczotki od położenia zerowego tak,
że kooce uzwojenia będą skrzyżowane, to prędkośd obrotowa wzrośnie. Przy pewnej wartości U
d
osiągnie ona wartośd prędkości synchronicznej. Napięcie U
d
jest wtedy napięciem stałym, a SEM E
3
jest równa zeru, gdyż poślizg s = 0. W obwodzie stojana płynie zatem prąd stały, a silnik pracuje jako
silnik synchroniczny. Przy dalszym rozsuwaniu szczotek prędkośd nadal się zwiększa, przekraczając
prędkośd synchroniczną. Maksymalna prędkośd silnika wynosi zwykle około 1,5·n
s
.
Rozruch silnika przeprowadza się, gdy położenie szczotek odpowiada minimalnej prędkości
obrotowej. Prąd rozruchowy jest wtedy najmniejszy i wynosi
(42.5)
Aby zwiększyd moment rozruchowy silnika, można, podobnie jak w silnikach indukcyjnych
pierścieniowych, włączyd w obwód uzwojenia stojana dodatkową rezystancję. W dwiczeniu, dla
dodatkowego zmniejszenia prądu rozruchowego ze względu na przyrządy pomiarowe, silnik nie jest
włączany bezpośrednio na napięcie znamionowe, lecz przez regulator indukcyjny, którym napięcie
jest płynnie zwiększane od 0 do U
n
.
3.2
Pomiar charakterystyk biegu jałowego
Schemat układu pomiarowego przedstawiono na rys. 42.3. Po ustawieniu szczotek w położeniu n
min
oraz regulatora indukcyjnego na U = 0 należy załączyd wyłącznik. Następnie wykonad rozruch silnika
przez zwiększenie napięcia do wartości znamionowej. Napięcie to powinno byd utrzymywane na tym
samym poziomie przez cały czas pomiarów. Dla różnych położeo szczotek w zakresie od n
min
do n
max
należy przeprowadzid pomiary: prędkości obrotowej n, prądu pobieranego z sieci I
0
, mocy pobieranej
P
0
oraz napięcia między szczotkami jednego z uzwojeo stojana U
d
. Do pomiaru napięcia U
d
należy
używad woltomierza nieczułego na zmiany częstotliwości, gdyż ze zmianą kąta
zmienia się nie tylko
wartośd U
d
, lecz także jego częstotliwośd. Wyniki pomiarów należy zestawid w tabeli 42.1.
Brak rysunku
Rys. 42.3. Układ do pomiaru charakterystyk biegu jałowego
Tabela 42.1
Lp.
U
I
u
I
v
I
w
I
0
P
I
P
II
P
0
U
d
n
cos
Uwagi
V
A
A
A
A
W
W
W
V obr/s
–
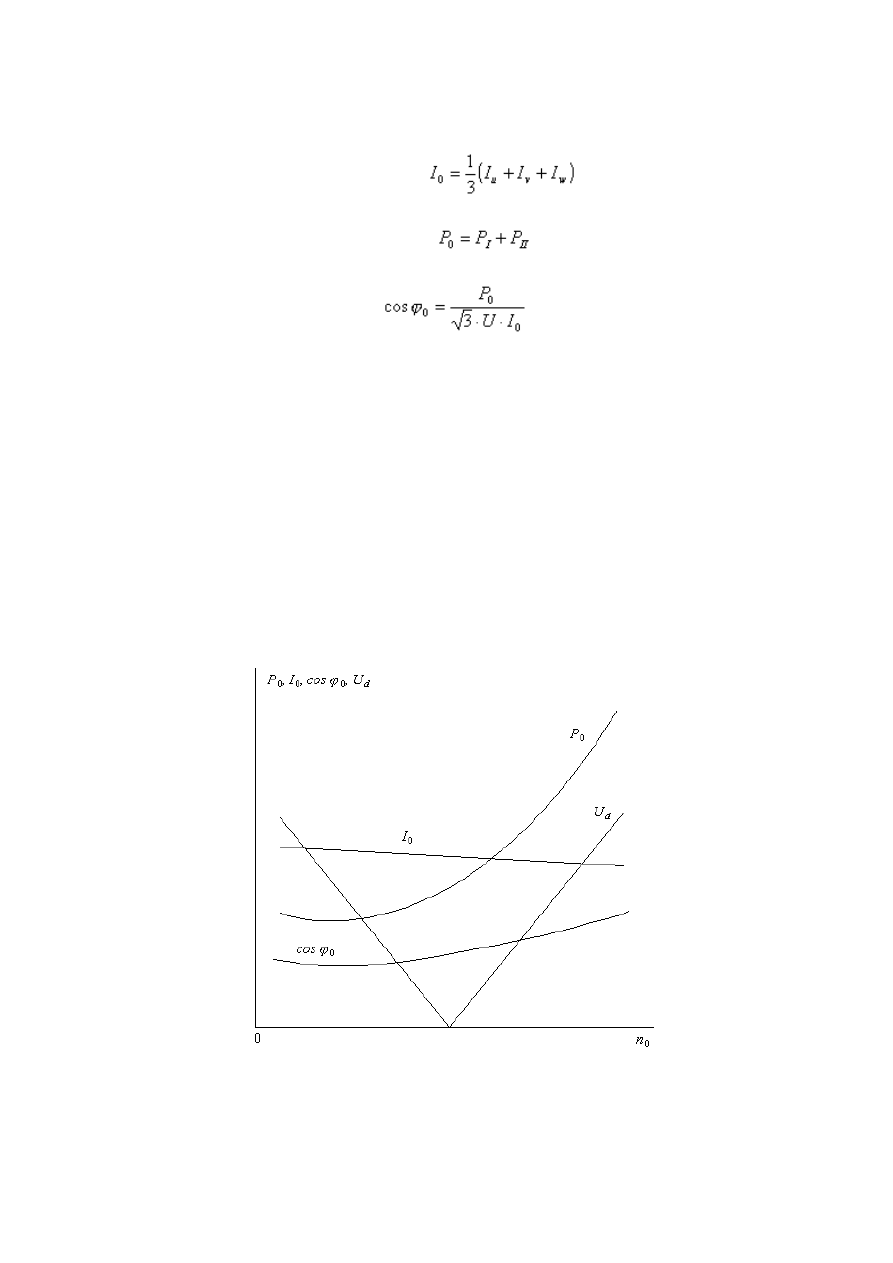
212
W tabeli 42.1
(42.6)
(42.7)
(42.8)
Na podstawie wyników pomiarów i obliczeo należy wykreślid charakterystyki: I
0
, P
0
, cos
0
, U
d
= f(n)
dla U = U
n
. Orientacyjne przebiegi tych zależności przedstawiono na rys. 42.4. Informują one o stanie
obwodu magnetycznego maszyny, symetrii uzwojeo, szczotek oraz stratach biegu jałowego. Straty P
0
składają się ze strat mechanicznych, strat w uzwojeniu od prądu I
0
oraz strat w żelazie stojana i
wirnika. Straty mechaniczne zależą od prędkości obrotowej i zwiększają się wraz z jej wzrostem.
Straty w żelazie wirnika są stałe, gdyż przy stałym napięciu zasilającym strumieo magnetyczny jest
praktycznie stały i stała jest częstotliwośd wirowania tego strumienia względem wirnika (f
1
).
Charakterystyczne minimum na krzywej P
0
= f(n) jest spowodowane przebiegiem zmian strat w
żelazie stojana. Straty te przy prędkości synchronicznej są równe zeru, gdyż strumieo sprzężony z
rdzeniem stojana jest strumieniem stałym, zwiększa się natomiast zarówno przy zwiększaniu się
prędkości ponad synchroniczną, jak i przy jej zmniejszaniu, ponieważ w obydwu tych przypadkach
zwiększa się częstotliwośd SEM stojana równa (s·f
1
).
Rys. 42.4. Charakterystyki biegu jałowego silnika Schrage-Richtera
213
3.3
Pomiar charakterystyk obciążenia
Schemat połączeo układu pomiarowego jak na rys. 42.3, lecz wał maszyny badanej jest teraz
sprzęgnięty z maszyną hamulcową pozwalającą na obciążenie silnika i pomiar momentu obrotowego.
Rozruch silnika należy wykonad jak w p. 3.2. Napięcie zasilające powinno byd przez cały czas
pomiarów równe znamionowemu. Dla dwóch skrajnych położeo szczotek, które w używanej w
dwiczeniu maszynie wynoszą -120° i 120° oraz dla
= 0 należy wykonad po około 6 pomiarów,
obciążając silnik w zakresie od biegu jałowego do 1,1·I
n
. W czasie pomiarów odczytuje się wartości
prądu I i mocy P
1
pobieranych z sieci, momentu obrotowego i prędkości obrotowej. Wyniki pomiarów
należy zestawid w tabeli 42.2.
Tabela 42.2
U = U
n
Lp.
I
u
I
v
I
w
I
P
I
P
II
P
1
M
n
P
2
cos
Uwagi
A
A
A
A W W W N·m obr/s W
–
–
= -120
= 0
= 120
W tabeli 42.2:
(42.9)
(42.10)
(42.11)
(42.12)
(42.13)
Na podstawie pomiarów i obliczeo należy wykreślid charakterystyki: n, P
2
, I, cos
,
= f(M) przy
U = U
n
, f = f
n
. Charakterystyki te wykreśla się dla trzech kątów rozsunięcia szczotek (każda rodzina
krzywych na oddzielnym wykresie). Ich orientacyjny przebieg przedstawiono na rys. 42.5a-e.
214
3.4
Pomiar początkowego momentu rozruchowego
Początkowy moment rozruchowy silnika to moment wytwarzany przez silnik w pierwszej chwili po
włączeniu go do sieci, tzn. przy prędkości obrotowej n = 0. Schemat układu pomiarowego jak na rys.
42.3. Do pomiaru momentu obrotowego, gdy n = 0, wykorzystuje się dynamometr maszyny
hamulcowej. W tym celu należy unieruchomid jej wirnik względem stojana za pomocą specjalnego
urządzenia blokującego.
Ponieważ prąd rozruchowy przy napięciu znamionowym kilkakrotnie przekracza wartośd prądu
znamionowego, pomiary należy przeprowadzid przy napięciu obniżonym, a następnie ich wyniki
przeliczyd na napięcie znamionowe. Napięcie pomiarowe U dobiera się tak, aby prąd pobierany z sieci
nie przekraczał 1,2·I
n
. Ponieważ przy n = 0 maszyna jest pozbawiona wentylacji, wskazania
przyrządów należy odczytywad bardzo szybko, ograniczając do niezbędnego minimum czas przepływu
prądu.
Dla różnych kątów rozsunięcia szczotek, w zakresie od
= -120° do 120°, należy wykonad około 10
pomiarów napięcia zasilającego U, prądu pobieranego z sieci I oraz momentu obrotowego M. Wyniki
pomiarów należy zestawid w tabeli 42.3.
Tabela 42.3
Lp.
U
I
u
I
v
I
w
I
I
r
M
M
r
Uwagi
1 V
A
A
A
A
A N·m N·m
Otrzymane z pomiarów wartości I oraz M odpowiadają obniżonemu napięciu U. Wartości prądu
rozruchowego I
r
i momentu rozruchowego M
r
przy napięciu znamionowym znajduje się z
przybliżonych wzorów
(42.14)
(42.15)
Na podstawie wyników pomiarów i obliczeo należy wykreślid charakterystyki I
r
, M
r
= f(
). Ich typowe
przebiegi przedstawiono na rys. 42.6.
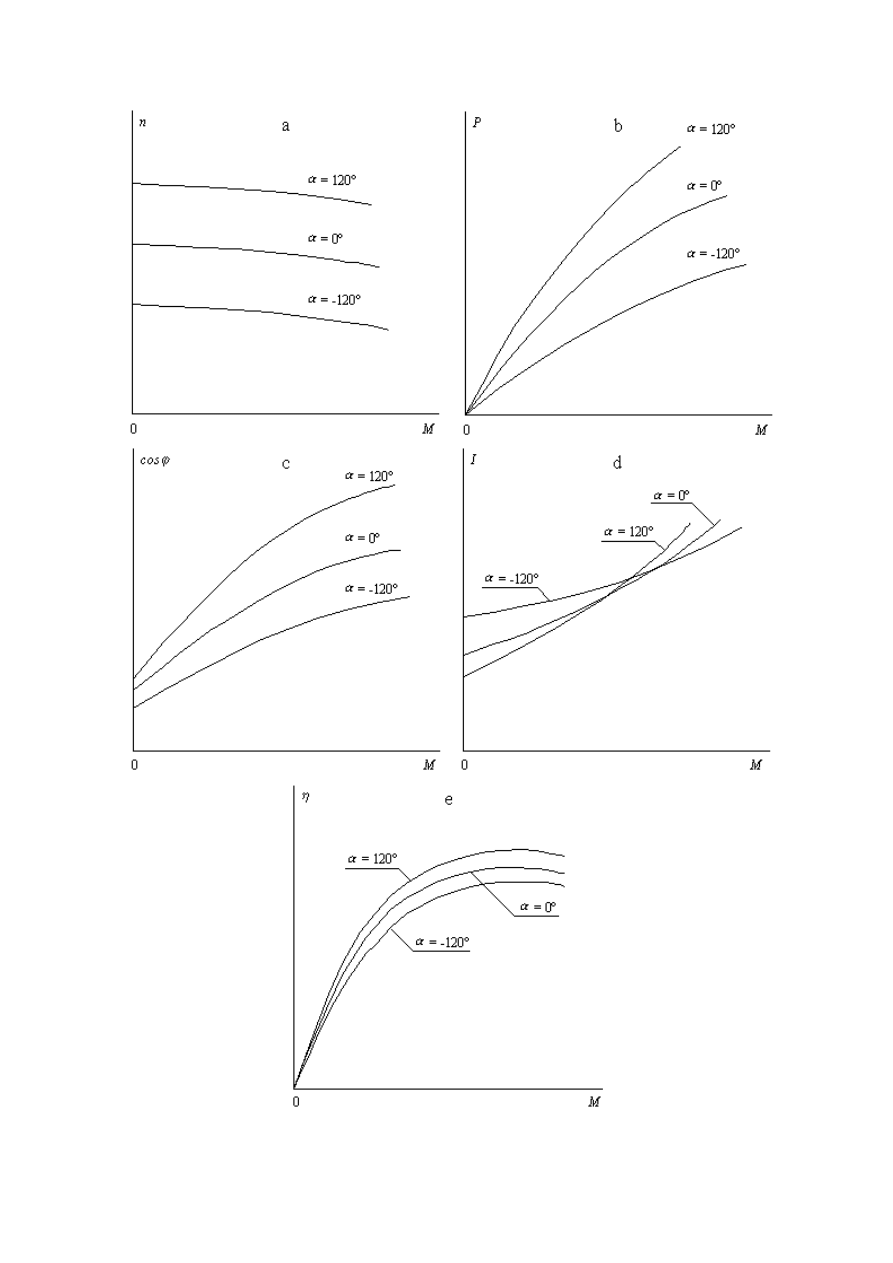
215
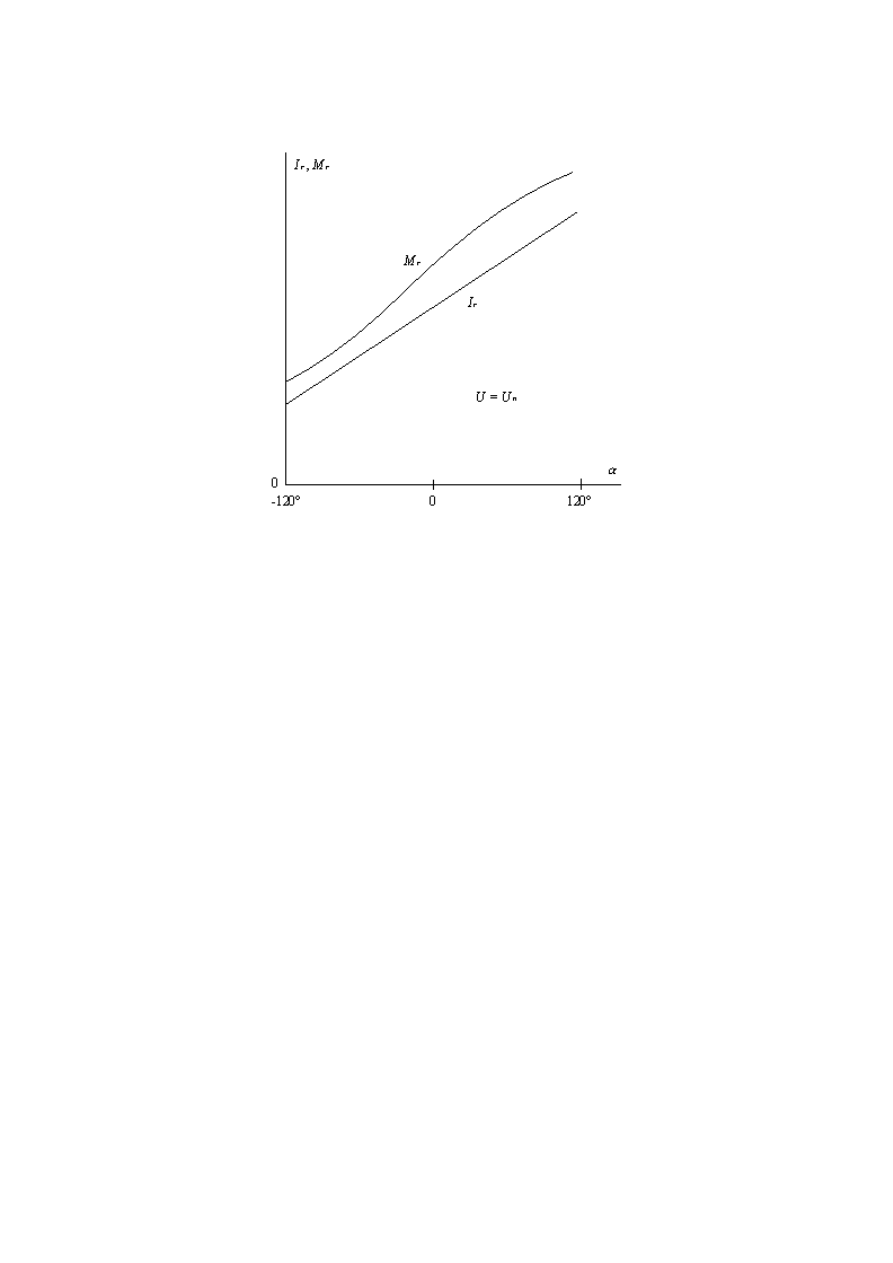
216
Rys. 42.5. Charakterystyki obciążenia silnika Schrage-Richtera
Rys. 42.6. Zależnośd prądu i momentu rozruchowego od kąta rozsunięcia szczotek
4
Sprawozdanie z ćwiczenia
Sprawozdanie z dwiczenia powinno zawierad:
protokół z pomiarów,
wykresy charakterystyk biegu jałowego P
0
, U
d
, I
0
, cos
0
= f(n),
wykresy charakterystyk obciążenia dla trzech kątów rozsunięcia szczotek ( = -120, 0, 120) I, P
1
,
n, cos
,
= f(M),
wykresy charakterystyk rozruchowych I
r
, M
r
= f() przy U = U
n
, n = 0,
uwagi i wnioski.
5 Pytania
Opisad budowę silnika Schrage-Richtera.
Jaką rolę w silniku odgrywa komutator?
Przy jakiej prędkości silnika w uzwojeniu stojana płynie prąd stały?
Przy jakim położeniu szczotek silnik pracuje jak zwykły silnik indukcyjny?
Opisad sposób rozruchu silnika.
W jaki sposób w silniku Schrage-Richtera można zwiększad współczynnik mocy?
Wymienid zalety i wady silnika Schrage-Richtera.
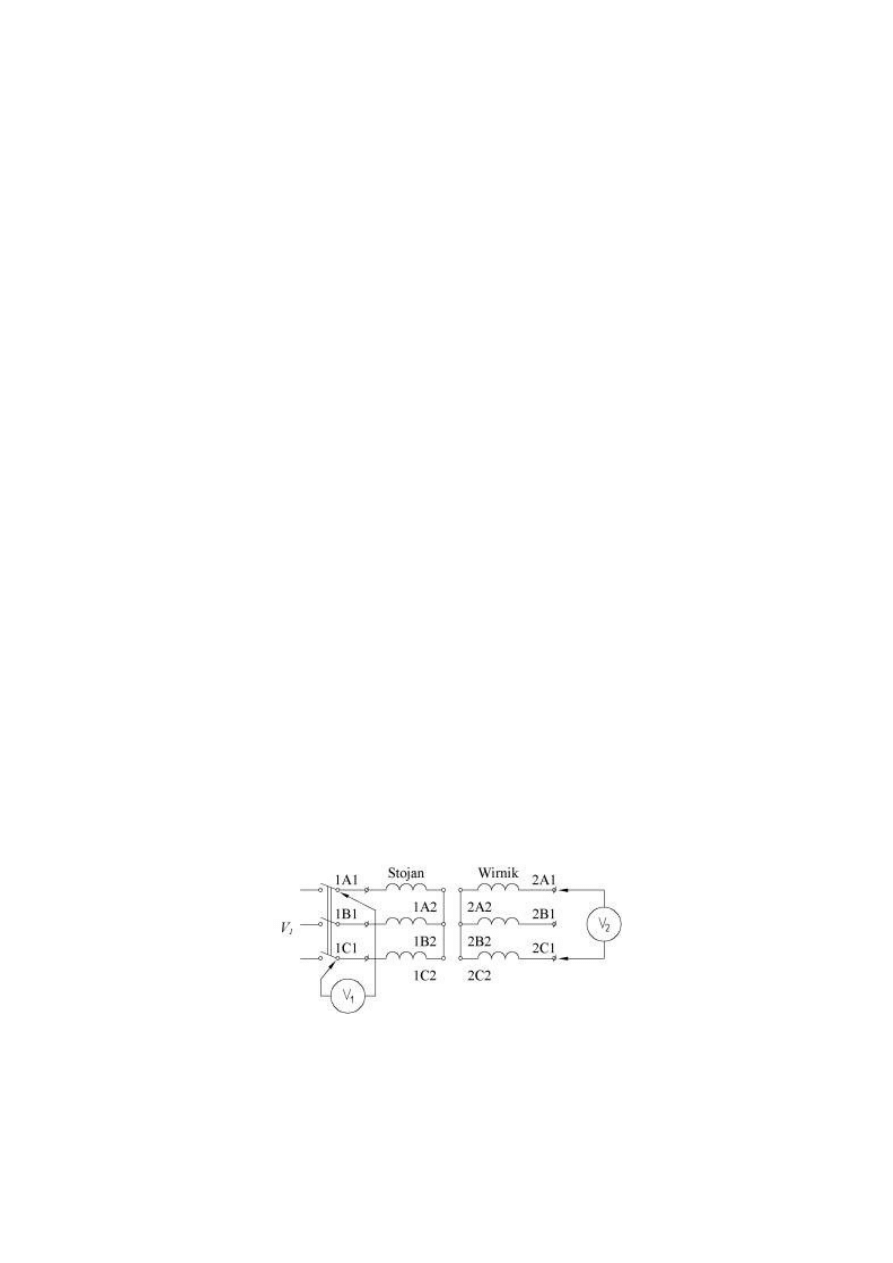
217
ĆWICZENIE 43
BADANIE PRZESUWNIKA FAZOWEGO I REGULATORA INDUKCYJNEGO
1
Program ćwiczenia
Pomiar rezystancji uzwojeo.
Pomiar przekładni napięciowej.
Sprawdzanie przesuwnika fazowego.
Sprawdzanie zakresu regulacji regulatora indukcyjnego.
Wyznaczanie sprawności regulatora indukcyjnego.
2
Cel ćwiczenia
Celem dwiczenia jest poznanie możliwości zastosowania maszyny indukcyjnej pracującej przy
zahamowanym wirniku. Głównymi przykładami takiego stanu pracy są przesuwnik fazowy oraz
regulator indukcyjny (zwany również transformatorem obrotowym). Urządzenia te są bardzo często
wykorzystywane w laboratoriach ze względu na ich cenne zalety, którymi są płynna regulacja
przesunięcia fazowego napięcia wyjściowego oraz płynna regulacja modułu napięcia wyjściowego.
Poznanie budowy i zasady działania tych urządzeo pozwoli dwiczącym pogłębid znajomośd ogólnej
teorii maszyn indukcyjnych i transformatorów. Przeprowadzone badania umożliwią porównanie tego
sposobu regulacji napięcia i fazy z innymi znanymi metodami, zarówno pod względem ekonomiki, jak
i możliwości eksploatacyjnych.
3
Omówienie programu ćwiczenia
3.1
Budowa i zasada działania przesuwnika fazowego
Przesuwnik fazowy zbudowany jest podobnie jak 3-fazowy silnik indukcyjny pierścieniowy. Różnica
polega jedynie na tym, że przesuwnik jest wyposażony w urządzenie zapobiegające obracaniu się
wirnika, umożliwiające jednocześnie dowolne ustawienie osi uzwojenia wirnika względem osi
uzwojenia stojana. Rolę tę odgrywa zazwyczaj samohamowna przekładnia ślimakowa. Schemat
połączeo uzwojeo przesuwnika fazowego przedstawiono na rysunku 43.1.
Rys. 43.1. Schemat połączeo uzwojeo przesuwnika fazowego
Po zasileniu jednego z uzwojeo maszyny indukcyjnej (wirnika lub stojana) symetrycznym napięciem
trójfazowym U
1
, pojawia się na zaciskach drugiego uzwojenia napięcie U
2
. Napięcie to jest skutkiem
przecinania prętów tego uzwojenia przez wirujący strumieo magnetyczny wytworzony przez prąd
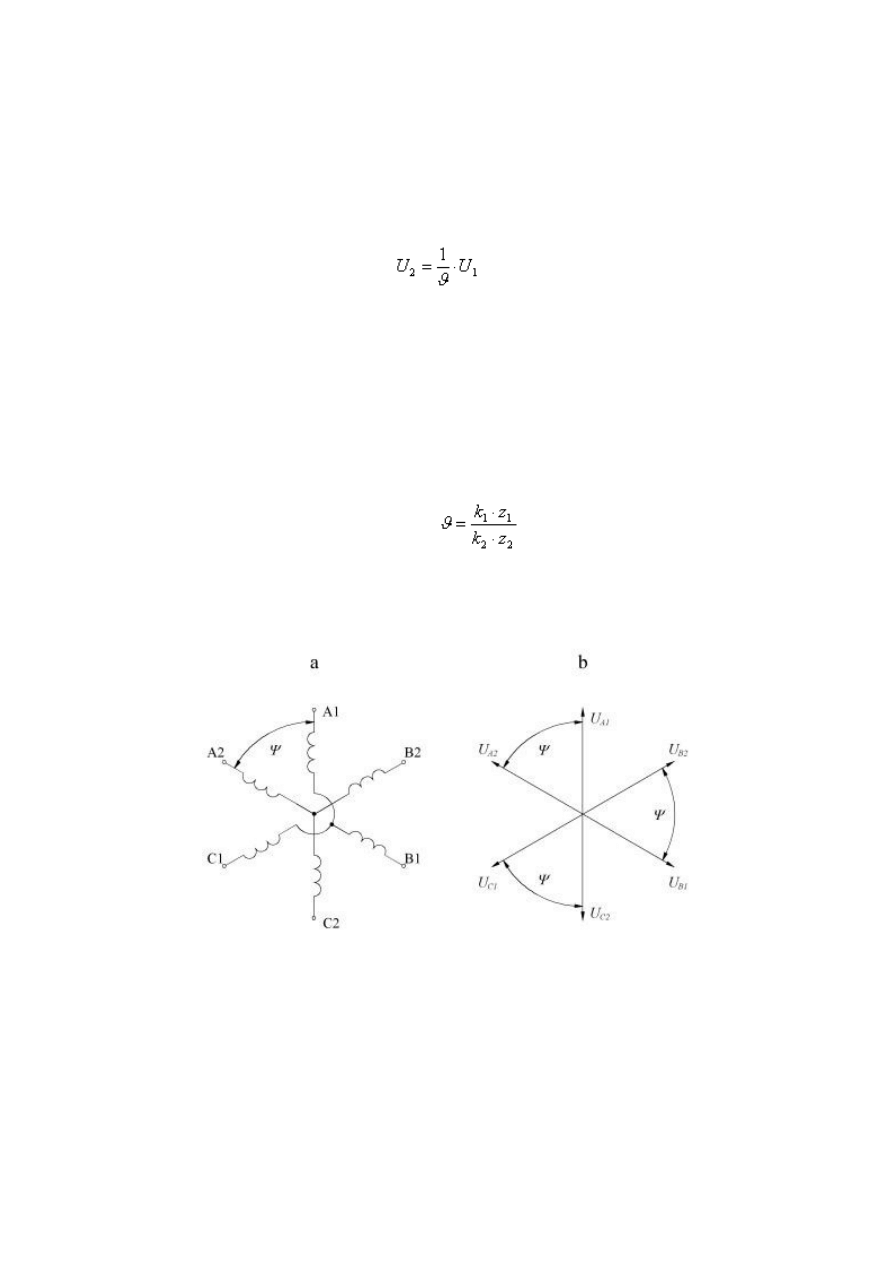
218
płynący w uzwojeniu zasilanym. Ponieważ wirnik jest nieruchomy względem stojana, częstotliwośd
napięcia U
2
jest równa częstotliwości napięcia zasilającego. Wartośd napięcia U
2
zależy od wartości
strumienia wirującego oraz stałej zależnej od konstrukcji przesuwnika. Ponieważ strumieo
magnetyczny jest proporcjonalny do wartości napięcia zasilającego, napięcie U
2
można wyrazid
zależnością
(43.1)
w której:
– stała zależna od konstrukcji urządzenia, zwana przekładnią napięciową między
uzwojeniem pierwotnym i wtórnym.
Z zależności (43.1) wynika, że przy stałej wartości napięcia zasilającego przesuwnik, napięcie
wyjściowe ma również wartośd stałą. Zależnośd ta jest identyczna jak dla zwykłych transformatorów,
lecz przekładnia
nie oznacza przekładni zwojowej, gdyż uzwojenia przesuwnika nie są skupione,
lecz rozłożone wzdłuż szczeliny. Zatem
(43.2)
gdzie: k
1
, k
2
– współczynniki uzwojeo (pierwotnego i wtórnego),
z
1
, z
2
– liczby zwojów poszczególnych uzwojeo.
Rys. 43.2. Kąty przesunięcia między: a) osiami uzwojeo, b) napięciami
Kąt przesunięcia fazowego między napięciami odpowiadających sobie uzwojeo stojana i wirnika
zależy od ich wzajemnego położenia. Jeśli uzwojenia są wykonane jako dwubiegunowe (p = 1), to kąt
przesunięcia fazowego między napięciami U
1
i U
2
jest równy kątowi geometrycznemu o jaki są
przesunięte osie uzwojeo stojana i wirnika (rys. 43.2). Ogólnie można napisad
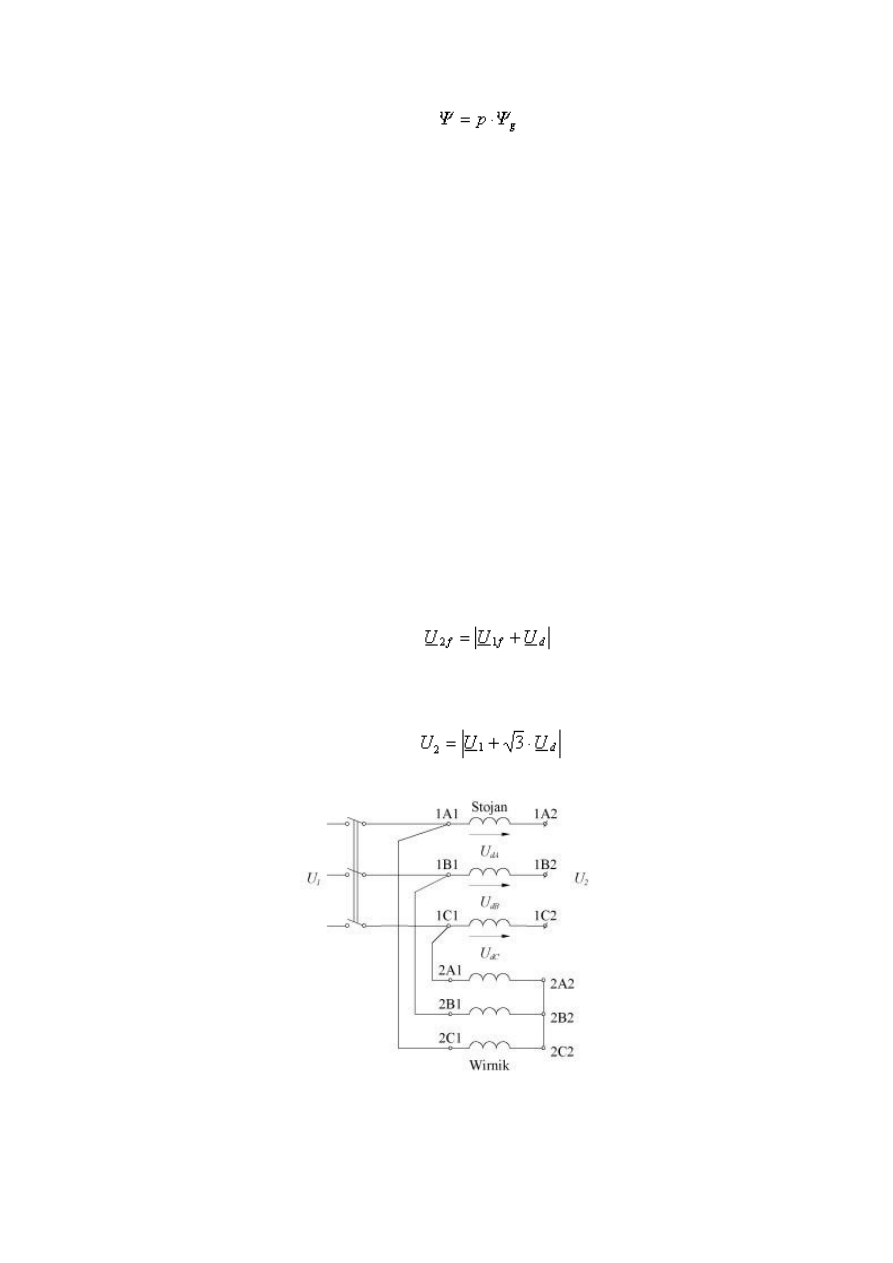
219
(43.3)
gdzie: p – liczba par biegunów uzwojeo przesuwnika,
g
– kąt geometryczny między osiami uzwojeo stojana i wirnika.
Z zależności (43.3) wynika, że kąt przesunięcia fazowego między napięciami pierwotnym i wtórnym
można regulowad przez zmianę ustawienia wirnika względem stojana. W zwykłych transformatorach
trójfazowych zmiana kąta między napięciem strony pierwotnej i strony wtórnej wiąże się ze zmianą
tzw. grupy połączeo (dwiczenie 32). Zmiana kąta jest jednak w takim przypadku skokowa, a wartośd
przekładni może ulec zmianie. Przesuwnik fazowy natomiast umożliwia płynną regulację fazy napięcia
wyjściowego, przy czym wartośd napięcia jest stała. Jest to bardzo cenna zaleta tego urządzenia.
3.2
Budowa i zasada działania regulatora indukcyjnego
Regulator indukcyjny różni się od przesuwnika fazowego jedynie sposobem połączenia uzwojeo (rys.
43.3). Jedno z uzwojeo (najczęściej uzwojenie wirnika) połączone w gwiazdę jest zasilane
symetrycznym napięciem trójfazowym przez pierścienie ślizgowe lub giętkie przewody. Wirujący
strumieo magnetyczny, wytworzony przez prąd płynący w tym uzwojeniu, indukuje w drugim
uzwojeniu napięcie dodawcze U
d
. Napięcie to dodaje się do napięcia źródła zasilającego U
1
, toteż na
wyjściu regulatora otrzymuje się napięcie U
2
będące równe sumie geometrycznej napięcia sieci i
napięcia dodawczego. Dla napięd fazowych można napisad
(43.4a)
a dla napięd międzyfazowych
(43.4b)
Rys. 43.3. Połączenie uzwojeo regulatora indukcyjnego
220
Podobnie jak w przesuwniku fazowym moduł napięcia U
d
jest niezależny od wzajemnego położenia
wirnika i stojana. Jednak na skutek zmiany fazy tego napięcia w stosunku do fazy napięcia U
1
, przy
wzajemnym przesuwaniu, ich suma geometryczna ulega zmianie.
Na rysunku 43.4 przedstawiono wykres wektorowy napięd dla jednej fazy regulatora. Wraz ze zmianą
kąta przesunięcia osi uzwojeo wirnika i stojana, kooce wektorów napięcia dodawczego U
d
i napięcia
wyjściowego U
2f
przesuwają się po okręgu o promieniu r = U
d
. Z rysunku wynika, że regulacja napięcia
U
2f
może się odbywad od (U
1f
– U
d
) do (U
1f
+ U
d
). Zatem jeżeli zachodzi równośd U
1f
= U
d
, to regulacja
napięd fazowych jest możliwa w zakresie 0 – 2·U
1f
oraz 0 – 2·U
1
dla napięd międzyfazowych. Stosunek
wartości napięcia dodawczego do zasilającego zależy od wymaganego zakresu regulacji. Jeśli zakres
ten wynosi np. 10%, to U
d
= 0,1·U
1f
. Zakres regulacji decyduje o wartości tzw. mocy własnej
(wewnętrznej) regulatora wyrażanej zależnością
(43.5)
w której: I
n
– znamionowy prąd strony wtórnej regulatora.
Moc S
w
należy wyraźnie odróżnid od tzw. mocy przechodniej regulatora S
2
, równej maksymalnej
mocy oddawanej przez regulator
(43.6)
Moc własna regulatora S
w
stanowi tę częśd mocy oddawanej, która podlega transformacji wewnątrz
regulatora i dlatego ma ona bezpośredni wpływ na gabaryty i masę regulatora oraz jego sprawnośd.
Ogólnie, im mniejsza moc wewnętrzna (mniejszy zakres regulacji), tym rozmiary regulatora są
mniejsze, a większa jest jego sprawnośd.
Z rys. 43.4 widad, że zmiana wartości napięcia wyjściowego wiąże się ze zmianą jego fazy. Gdy jest to
niepożądane, stosuje się układ dwóch jednakowych regulatorów indukcyjnych połączonych jak na
rys. 43.5. Regulatory te są sprzęgnięte wspólnym wałem, przy czym uzwojenia, w których indukują się
napięcia dodawcze są połączone szeregowo, a uzwojenia połączone w gwiazdę wytwarzają
strumienie wirujące w przeciwnych kierunkach. Zmiana położenia wirnika względem stojana
powoduje przesunięcie fazy napięcia dodawczego w jednym uzwojeniu o kąt
, a w drugim o kąt -
.
W rezultacie na zaciskach wyjściowych otrzymuje się napięcie będące w fazie z napięciem zasilającym
(rys. 43.5b).
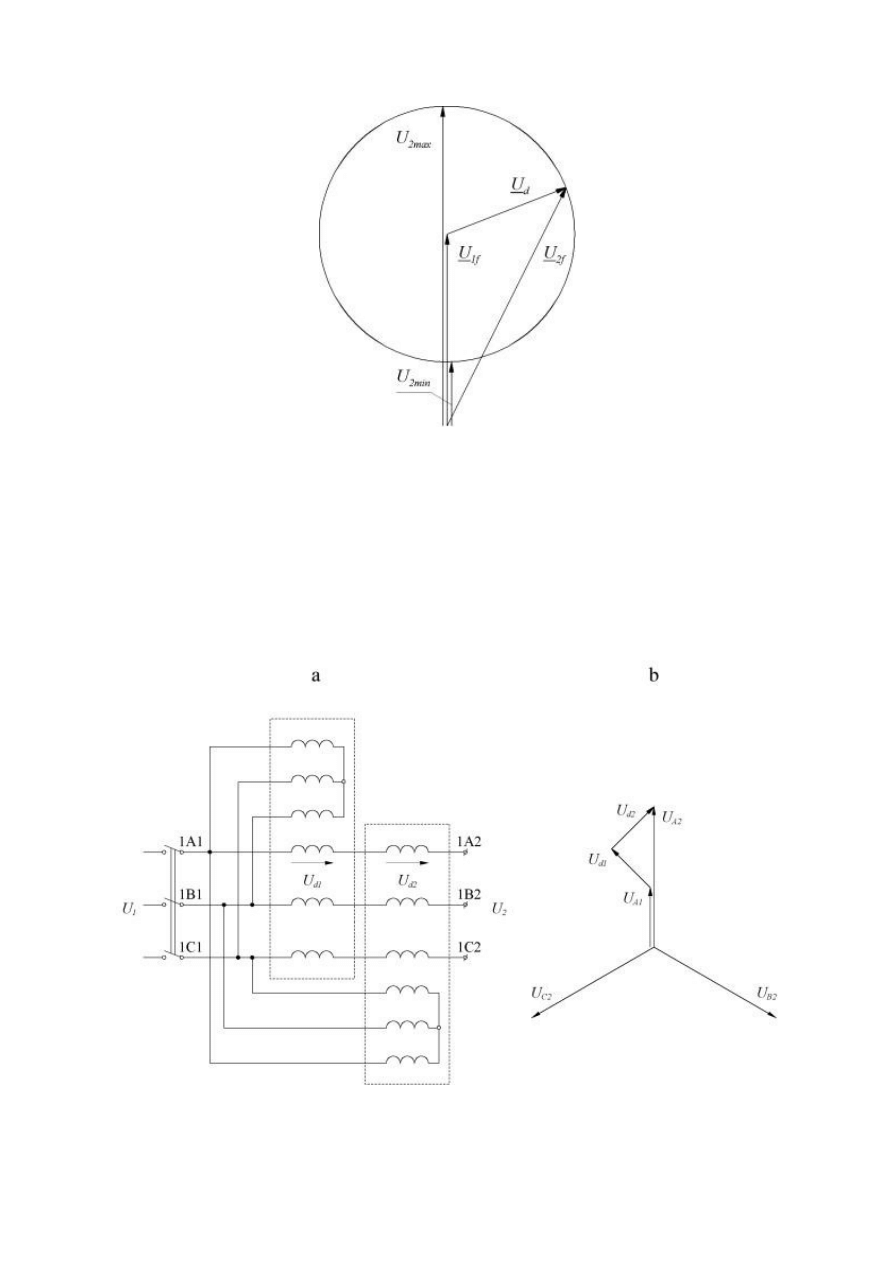
221
Rys. 43.4. Wykres wektorowy napięd regulatora
Możliwe jest wykonanie regulatora indukcyjnego jednofazowego (rys. 43.6). W takim przypadku
jednofazowe uzwojenie wytwarza pulsujący strumieo magnetyczny, którego maksimum zawsze
przypada w osi uzwojenia zasilanego. Wraz ze zmianą kąta położenia wirnika faza napięcia
dodawczego nie ulega zmianie, zmienia się tylko jego wartośd gdyż zmienia się współczynnik
indukcyjności wzajemnej między uzwojeniami. Wynika z tego, że maszyna indukcyjna jednofazowa
nie może pracowad jako przesuwnik fazowy.
Rys. 43.5. Układ do wyeliminowania przesunięcia fazowego: a) schemat połączeo uzwojeo, b) wykres
wektorowy
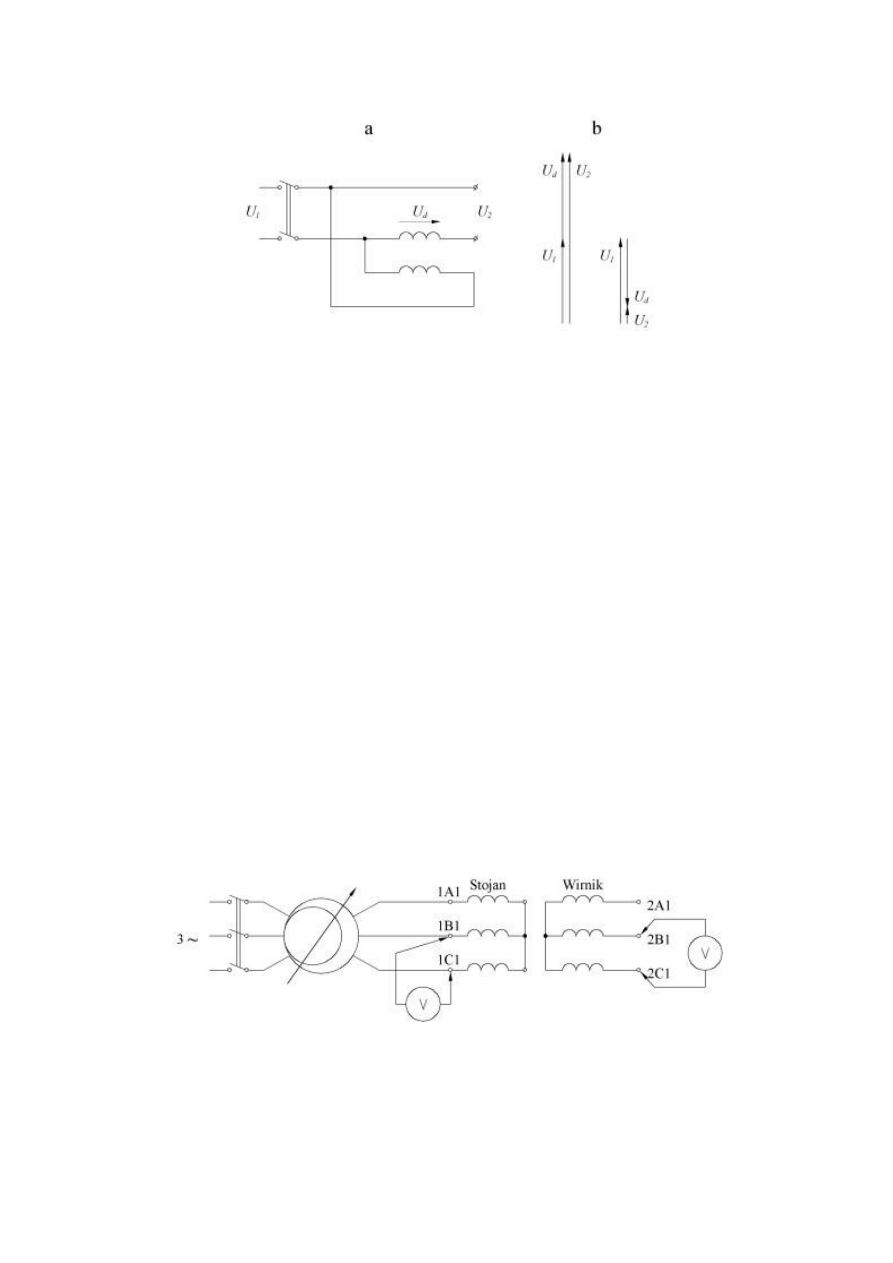
222
Rys. 43.6. Regulator jednofazowy: a) schemat połączeo, b) wykres wektorowy
Ponieważ wirnik regulatora jest nieruchomy, przepływ powietrza chłodzącego w mniejszych
jednostkach jest wymuszany wentylatorem zewnętrznym napędzanym silnikiem elektrycznym. Duże
regulatory mają, podobnie jak transformatory, chłodzenie olejowe.
Przedmiotem badao w dwiczeniu jest maszyna indukcyjna trójfazowa, która w zależności od potrzeby
może byd połączona jako przesuwnik fazowy lub regulator indukcyjny, gdyż zaciski obydwóch
uzwojeo są wyprowadzone na tabliczkę zaciskową.
3.3
Pomiar rezystancji uzwojeń
Pomiar rezystancji uzwojeo należy przeprowadzid dla maszyny nie nagrzanej. Należy zmierzyd
rezystancję faz wszystkich uzwojeo w temperaturze otoczenia i przeliczyd je na umowną temperaturę
pracy.
3.4
Pomiar przekładni napięciowej
Schemat połączeo układu pomiarowego jak na rys. 43.7. Obydwa uzwojenia są połączone w gwiazdę.
Uzwojenie wirnika jest zasilane symetrycznym napięciem trójfazowym. Dla trzech rożnych wartości
napięcia zasilającego w zakresie od 0 do U
n
należy wykonad pomiary napięd międzyfazowych na
zaciskach obydwu uzwojeo. Wyniki pomiarów zestawid w tabeli 43.1.
Rys. 43.7. Układ do pomiaru przekładni napięciowej
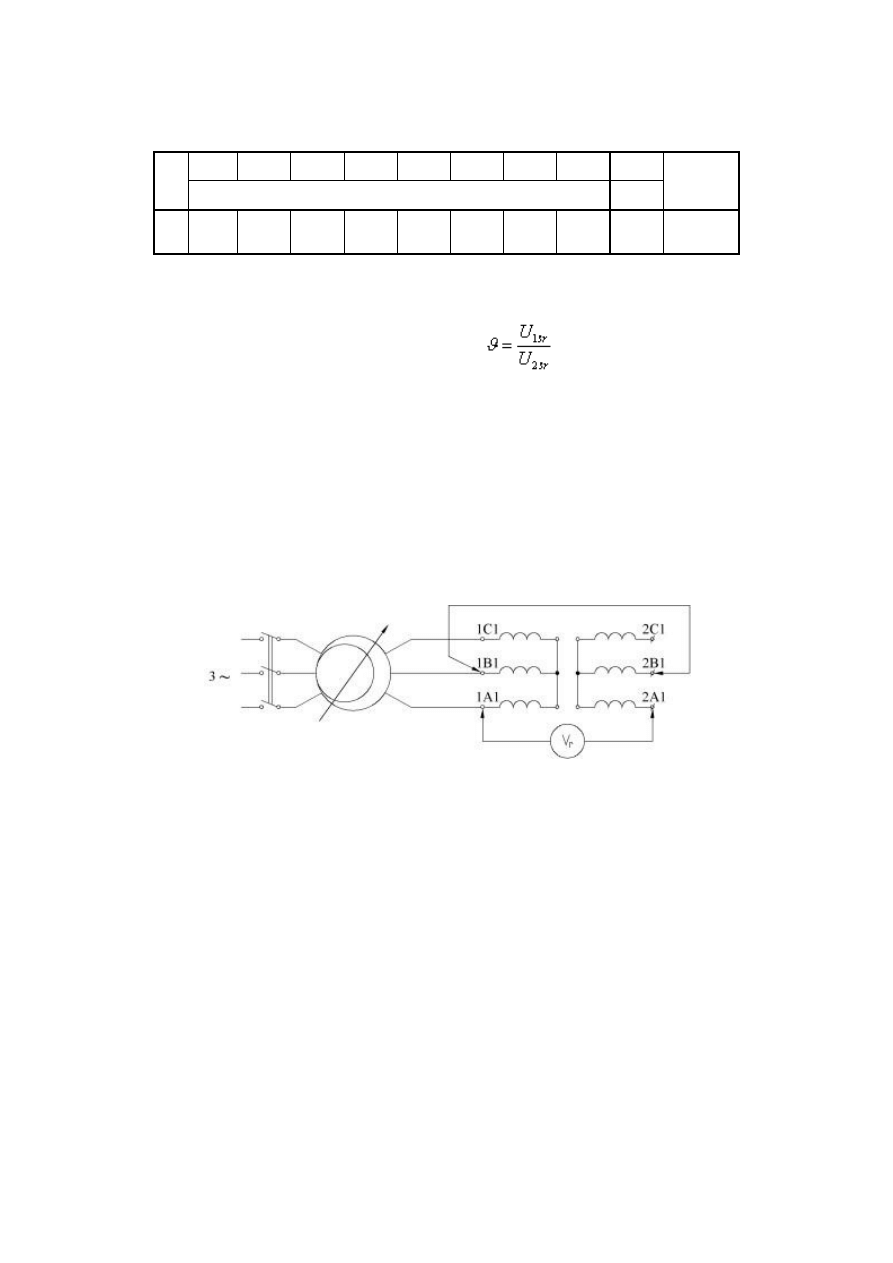
223
Tabela 43.1
Lp.
U
AB1
U
BC1
U
CA1
U
1śr
U
AB2
U
BC2
U
CA2
U
2śr
Uwagi
V
–
Na ich podstawie oblicza się przekładnię jako
(43.7)
3.5
Sprawdzanie przesuwnika fazowego
Do bezpośredniego odczytywania kąta przesunięcia fazowego miedzy napięciem wejściowym i
wyjściowym przesuwnika służy skala z podziałką w stopniach, po której przesuwa się wskazówka
sprzężona z wałem wirnika. Ponieważ zależnośd kąta przesunięcia fazowego
od kąta obrotu wirnika
jest liniowa, podziałka skali jest równomierna. Przesuwnik fazowy z prawidłowo naniesioną podziałką
i prawidłowo ustawioną wskazówką często odgrywa, oprócz roli regulatora fazy napięcia, rolę
przyrządu pomiarowego. Klasa dokładności takiego przyrządu wynosi około 1,5.
Rys. 43.8. Układ do sprawdzania przesuwnika fazowego
W dwiczeniu należy sprawdzid, czy wskazówka przesuwnika jest zamocowana na wale prawidłowo i
ewentualnie skorygowad jej ustawienie. W tym celu sprawdza się prawidłowośd wskazao dla kątów
0° i 180°. Punkty te wybrano do pomiaru dlatego, że jest dośd prosty sposób pomiaru tych kątów,
podczas gdy do pomiaru kątów pośrednich konieczne są bardziej skomplikowane metody i nie
gwarantują one dużej dokładności.
Schemat układu pomiarowego przedstawiono na rys. 43.8. Przesuwnik jest zasilany trójfazowo
napięciem symetrycznym o regulowanej wartości. Między odpowiadające sobie zaciski strony
pierwotnej i wtórnej 1A1 i 2A1 jest włączony woltomierz różnicowy V
r
, natomiast zaciski 1B1 i 2B1 są
ze sobą zwarte. Woltomierz V
r
wskazuje zatem moduł różnicy napięd międzyfazowych strony
pierwotnej i wtórnej. Gdy kąt przesunięcia fazowego
= 0, napięcie U
r
osiąga wartośd minimalną, a
gdy
= 180, wartośd maksymalną.
224
Badanie przeprowadza się przy tak obniżonym napięciu, aby maksymalna wartośd U
r
nie była większa
niż napięcie znamionowe przesuwnika.
Pomiary rozpoczyna się od znalezienia takiego położenia wirnika, przy którym woltomierz V
r
wskaże
wartośd minimalną. Wskazówka przesuwnika powinna wskazywad
= 0, a jeżeli jest przesunięta z
tego położenia, to należy, po uprzednim odblokowaniu, ustawid ją w pozycji zerowej i ponownie
zablokowad. Przez cały czas trwania dalszych pomiarów nie należy zmieniad ustawienia wskazówki.
Następnie przyłączając woltomierz kolejno do zacisków 1B1 - 2B1 (przy zwartych zaciskach 1C1 - 2C1)
oraz 1C1 - 2C1 (przy zwartych zaciskach 1A1 - 2A1), należy znaleźd położenie wirnika, przy którym U
r
jest minimalne i odczytad wskazanie na skali przesuwnika. Następnie dla trzech poprzednich połączeo
woltomierza należy znaleźd wskazania wskazówki przesuwnika, przy których napięcia na woltomierzu
różnicowym osiągają wartości maksymalne. Wyniki zestawid w tabeli 43.2. Na ich podstawie obliczyd
wartości błędów bezwzględnych
ze wzorów
(43.8)
Tabela 43.2
Połączenie
woltomierza V
r
Zaciski zwarte
U
rmin
(
= 0)
U
rmax
(
= 180)
1°
1
1°
1°
1A1 - 2A1
1B1 - 2B1
0
1B1 - 2B1
1C1 - 2C1
1C1 - 2C1
1A1 - 2A1
3.6
Badanie regulatora indukcyjnego
3.6.1
Sprawdzanie zakresu regulacji napięcia
Maszynę połączoną jak na rys. 43.3 należy zasilid znamionowym napięciem U
1
. Następnie obracając
wirnik, zmierzyd dwie skrajne wartości napięcia U
2
: U
2min
oraz U
2max
. Wartości te porównad z
obliczonymi ze wzorów
(43.9)
(43.10)
w których:
– przekładnia wyznaczona w p. 3.4.
Na podstawie pomiarów narysowad w skali wykres wektorowy napięd regulatora.
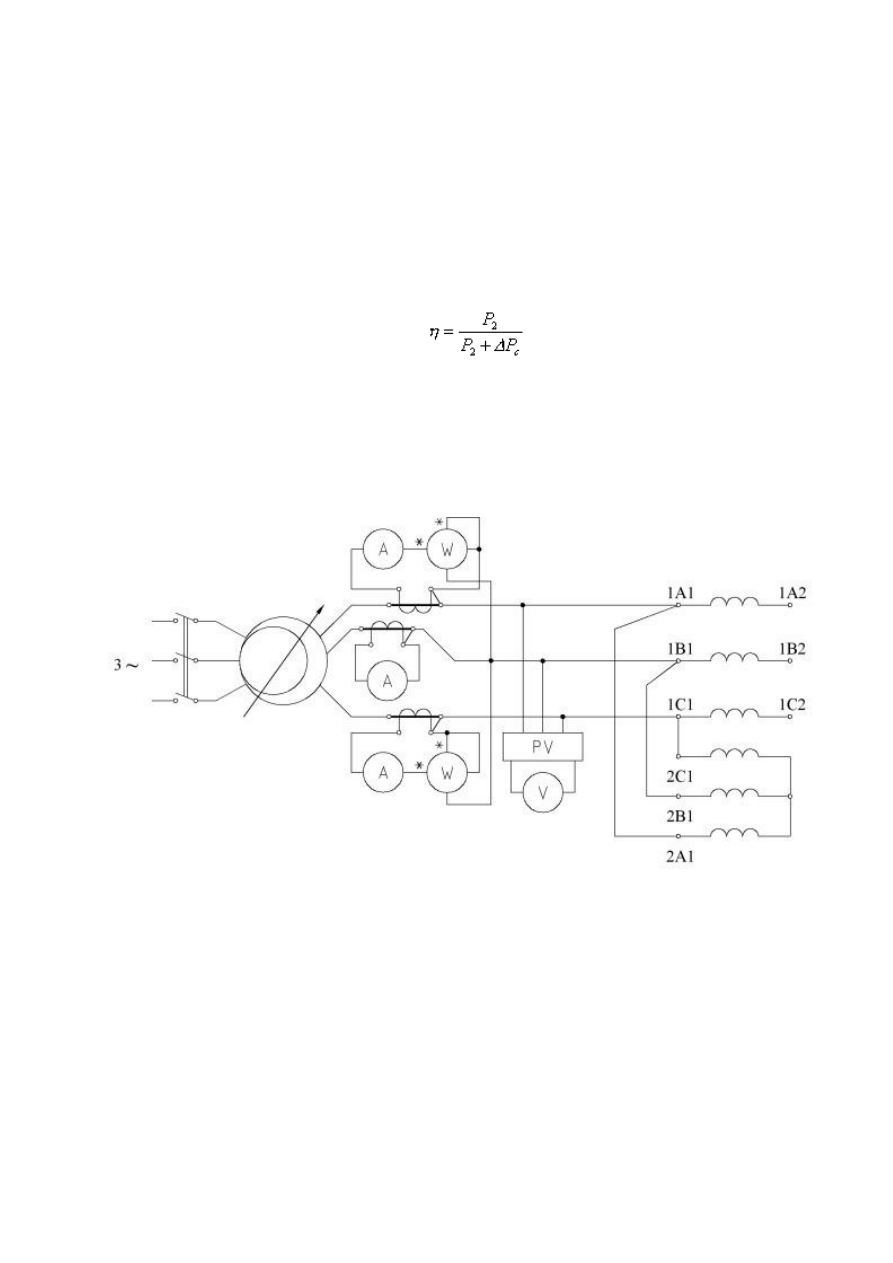
225
3.6.2
Wyznaczanie sprawności regulatora indukcyjnego
Sprawnośd regulatora zostanie wyznaczona metodą pośrednią, przez pomiar strat. Metoda ta nie
różni się w zasadzie od podobnych pomiarów przeprowadzanych dla transformatorów (dwiczenie 31).
Sprawnośd zostanie wyznaczona dla znamionowego punktu pracy: U
1
= U
n
, I
2
= I
n
, cos
= 1 przy
U
2
= U
2max
.
Sprawnośd wyznaczaną metodą pośrednią można wyrazid wzorem
(43.11)
w którym: P
2
– moc oddawana przez regulator,
P
c
– suma strat w regulatorze obciążonym mocą P
2
.
Straty w rdzeniu (żelazie) i straty obciążeniowe (w miedzi), składające się na sumę strat
P
c
, znajduje
się na podstawie wyników pomiarów stanu jałowego i stanu zwarcia.
Rys. 43.9. Układ do pomiaru stanu jałowego regulatora
3.6.3
Pomiary stanu jałowego regulatora
Schemat układu pomiarowego jak na rys. 43.9. Regulator zasila się napięciem znamionowym i mierzy
moc pobieraną przy otwartych zaciskach wyjściowych. Moc ta pokrywa straty w żelazie rdzenia oraz
straty obciążeniowe spowodowane przepływem prądu jałowego przez rezystancję uzwojenia wirnika.
Ponieważ w obwodzie magnetycznym jest szczelina powietrzna, prąd jałowy jest dośd duży, zatem
strat obciążeniowych wywołanych jego przepływem nie można pominąd (tak jak to jest praktykowane
w zwykłych transformatorach). Straty mocy w żelazie można obliczyd ze wzoru
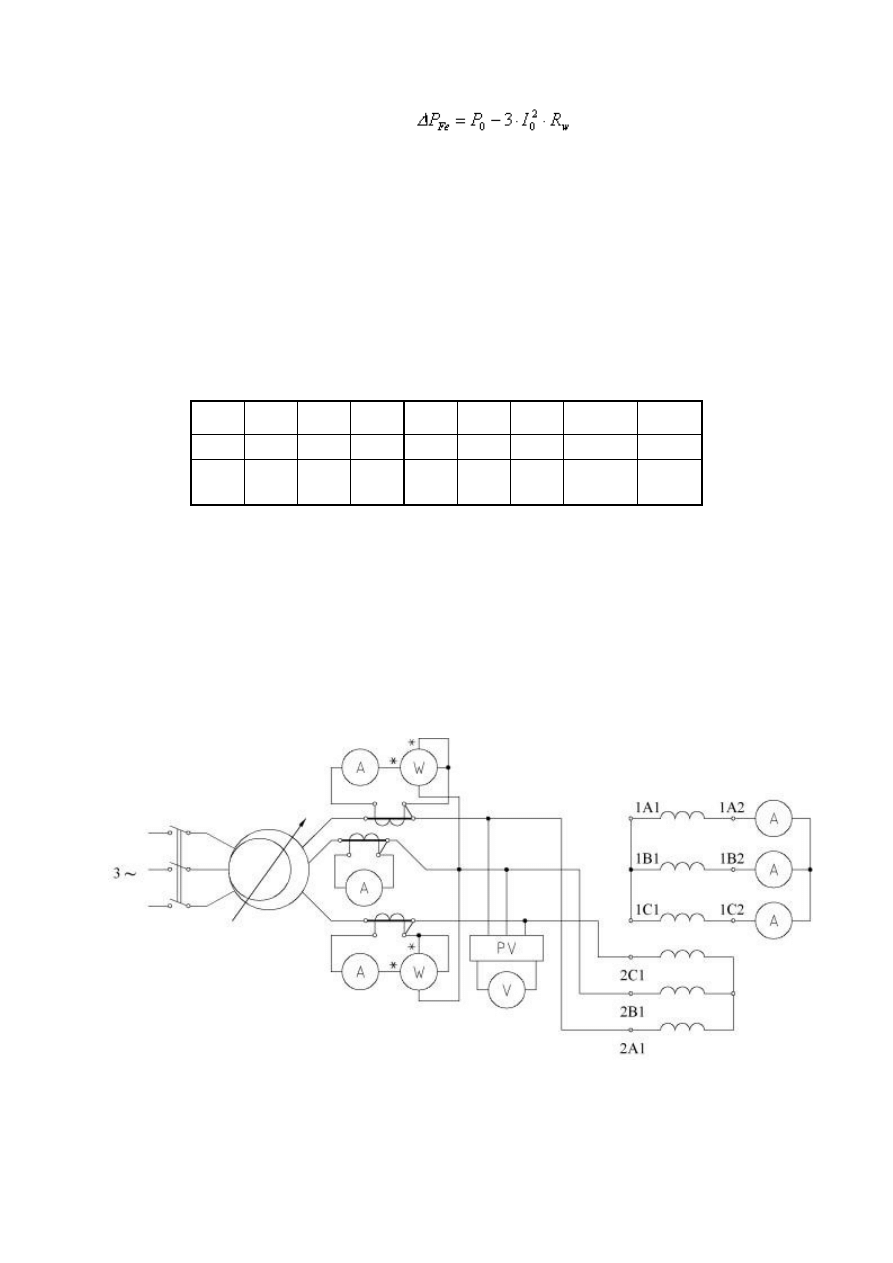
226
(43.12)
w którym: I
0
– prąd stanu jałowego,
R
w
– rezystancja jednej fazy wirnika (zmierzona w p. 3.3)
P
0
– moc pobierana w stanie jałowym.
Wyniki pomiarów stanu jałowego przy znamionowej wartości napięcia zasilającego zestawid w tabeli
43.3.
Tabela 43.3
U
1
= U
n
I
A
I
B
I
C
I
0śr
P
I
P
II
P
0
3·I
0
2
·R
w
P
Fe
A
A
A
A
W
W
W
W
W
3.6.4
Pomiary stanu zwarcia regulatora
Schemat układu pomiarowego przedstawiono na rys. 43.10. Wirnik regulatora jest zasilany
obniżonym napięciem trójfazowym, a odłączone uzwojenie stojana jest zwarte przez amperomierze.
Napięcie zasilające wirnik należy stopniowo zwiększad, aż do uzyskania w zwartym uzwojeniu stojana
znamionowej wartości prądu I
2n
. W tym stanie należy zmierzyd moc P
z
pobieraną ze źródła, prądy w
uzwojeniach wirnika oraz napięcie zasilające. Wyniki pomiarów zestawid w tabeli 43.4.
Rys. 43.10. Układ do pomiaru stanu zwarcia regulatora
Tabela 43.4
227
I
s
= I
2n
U
AB
U
BC
U
CA
U
z
I
A
I
B
I
C
I
w
P
I
P
II
P
z
cos
z
U
R
U
X
V
A
W
–
V
W tabeli 43.4
(43.13)
(43.14)
(43.15)
(43.16)
(43.17)
3.6.5
Obliczanie sprawności regulatora
Wzór (43.11) na obliczenie sprawności regulatora można napisad w postaci
(43.18)
gdzie: P
2
– moc oddawana przez regulator,
P
*
obc
– straty obciążeniowe podstawowe w umownej temperaturze pracy,
P
*
dod
– straty dodatkowe w umownej temperaturze pracy,
P
Fe
– straty w rdzeniu, wyznaczone na podstawie pomiarów stanu jałowego (tab. 43.3).
Moc P
2
oblicza się ze wzoru
(43.19)
Znamionowy prąd strony wtórnej I
2n
jest podawany na tabliczce znamionowej regulatora, natomiast
odpowiadające mu napięcie U
2n
, gdy cos
= 1, można obliczyd z przybliżonego wzoru
228
(43.20)
gdzie: U
R
, U
X
– składowa czynna i bierna napięcia zwarcia (tab. 43.4),
– przekładnia napięciowa miedzy stojanem a wirnikiem (tab. 43.1),
U
1n
– znamionowe napięcie zasilania regulatora (podane na tabliczce znamionowej).
Wzór (43.20) jest ważny tylko dla ustawienia regulatora na maksymalne napięcie wtórne.
Straty obciążeniowe podstawowe w temperaturze otoczenia są równe
(43.21)
gdzie: I
w
– prąd wirnika odpowiadający w stanie zwarcia prądowi I
2n
(z tabeli 43.4),
R
st
, R
w
– rezystancje faz stojana i wirnika w temperaturze otoczenia T
o
(wyznaczone w p. 3.3).
Straty podstawowe przeliczone na umowną temperaturę pracy T
p
(348K) w przypadku uzwojeo
miedzianych wynoszą
(43.22)
Straty dodatkowe
P
dod
stanowią różnicę między całkowitą mocą pobieraną w stanie zwarcia a
stratami podstawowymi
(43.23)
Po przeliczeniu na umowną temperaturę pracy straty te wynoszą
(43.24)
Po podstawieniu obliczonych wartości do wzoru (43.18) należy obliczyd sprawnośd regulatora. Jest
ona tym większa, im mniejszy jest zakres regulacji. Dlatego porównywad ze sobą można jedynie
sprawności regulatorów o tym samym zakresie regulacji. Jest to spowodowane tym, że podobnie jak
w autotransformatorach częśd mocy nie jest w regulatorze przetwarzana, a zatem nie wywołuje strat.

229
4
Opracowanie wyników pomiarów
Sprawozdanie z dwiczenia powinno zawierad:
protokół z pomiarów wraz z obliczeniami,
wykres wektorowy napięd regulatora,
obliczenia sprawności regulatora dla znamionowych warunków pracy,
uwagi i wnioski.
5 Pytania
Opisad budowę i zasadę działania regulatora indukcyjnego.
Na czym polegają analogie, a na czym różnice między regulatorem indukcyjnym a
autotransformatorem?
Narysowad układ połączeo przesuwnika fazowego i regulatora indukcyjnego.
Wyjaśnid dlaczego maszyna indukcyjna jednofazowa nie może służyd jako przesuwnik fazowy.
Dlaczego prąd stanu jałowego regulatora indukcyjnego jest znacznie większy niż prąd jałowy
transformatora o tej samej mocy?
Podad zalety i wady regulatorów indukcyjnych.
Omówid pojęcie mocy własnej i mocy przechodniej regulatora.

230
POLSKIE NORMY
Maszyny elektryczne
PN-E-04270:1972 (PN-72/E-04270) Maszyny elektryczne wirujące prądu stałego. Metody badao
PN-E-04272:1972 (PN-72/E-04272) Maszyny elektryczne wirujące. Silniki indukcyjne
trójfazowe. Metody badao Zmiany 1 BI 12/73 poz.104
PN-E-06015:1973 (PN-73/E-06015) Maszyny elektryczne małej mocy. Przetwornice. Ogólne
wymagania i badania
PN-E-06010:1974 (PN-74/E-06010) Maszyny elektryczne małej mocy. Ogólne wymagania i
badania Zastąpione częściowo przez PN-89/E-06800 w zakresie silników Zmiany
1 BI 6/75 poz.56 2 BI 8/77 poz.64 3 BI 11-12/79 poz.90 4 BI 5/83 poz.28
PN-E-02109:1975 (PN-75/E-02109) Silniki elektryczne małej mocy. Znamionowe moce i
prędkości obrotowe
PN-E-06017:1975 (PN-75/E-06017) Maszyny elektryczne wirujące. Trójfazowe silniki
dźwignicowe pierścieniowe. Wymagania i badania
PN-E-06708:1988 (PN-88/E-06708) Maszyny elektryczne wirujące. Oznaczanie wyprowadzeo i
kierunek wirowania Zmiany 1 BI 1/93 poz.1
PN-E-06702:1989 (PN-89/E-06702) Maszyny elektryczne wirujące. Straty i sprawnośd Zmiany 1
BI 1/93 poz.1
PN-E-06700:1991 (PN-91/E-06700) Maszyny elektryczne wirujące. Terminologia
PN-E-06712:1992 (PN-92/E-06712) Maszyny elektryczne wirujące. Charakterystyki rozruchowe
jednobiegowych trójfazowych silników indukcyjnych klatkowych na napięcie do
660 V włącznie
PN-E-06750:1992 (PN-92/E-06750) Maszyny elektryczne wirujące. Oznaczenia
PN-E-06710:1993 (PN-93/E-06710) Maszyny elektryczne wirujące. Zasady opisu maszyn
synchronicznych
PN-E-06704:1994 Maszyny elektryczne wirujące. Metody wyznaczania wielkości
charakterystycznych maszyn synchronicznych na podstawie badao
PN-E-06800:1996 Maszyny elektryczne wirujące. Małe silniki elektryczne
PN-E-06830:1996 Maszyny elektryczne wirujące. Maszyny do sterowania. Ogólne wymagania i
badania

231
PN-E-06833:1996 Maszyny elektryczne wirujące. Maszyny do sterowania. Selsyny zestykowe
PN-E-06834:1996 Maszyny elektryczne wirujące. Maszyny do sterowania. Silniki indukcyjne
dwufazowe
PN-E-06835:1996 Maszyny elektryczne wirujące. Maszyny do sterowania. Silniki prądu stałego o
magnesach trwałych
PN-E-06836:1996 Maszyny elektryczne wirujące. Maszyny do sterowania. Silniki skokowe
PN-E-06837:1996 Maszyny elektryczne wirujące. Maszyny do sterowania. Prądnice
tachometryczne
PN-E-06850:1996 Maszyny elektryczne wirujące. Maszyny w wykonaniu tropikalnym
PN-E-06854:1996 Maszyny elektryczne wirujące. Silniki dźwigowe cichobieżne. Wymagania i
badania
PN-IEC 34-1:1997 Maszyny elektryczne wirujące. Dane znamionowe i parametry
PN-IEC 34-3:1994 Maszyny elektryczne wirujące. Wymagania szczegółowe dla maszyn
synchronicznych szybkobieżnych typu turbo Poprawki 1 N 8/98
Transformatory
PN-E-04070:1986 (PN-86/E-04070) Transformatory. Metody badao.
PN-E-81003:1996 Transformatory. Oznaczenia zacisków i zaczepów uzwojeo, rozmieszczenie
zacisków
PN-IEC 76-1/Ak:1998 Transformatory. Wymagania ogólne (Arkusz krajowy)
PN-IEC 989:1994 Transformatory oddzielające, autotransformatory, transformatory
regulacyjne i dławiki
Symbole graficzne
PN-E-01200:1992 (PN-92/E-01200) Symbole graficzne stosowane w schematach.

232
Literatura uzupełniająca
PLAMITZER A.M., Maszyny elektryczne, Warszawa, WNT, 1972.
LATEK W., Zarys maszyn elektrycznych, Warszawa, WNT, 1978.
JEZIERSKI E., Transformatory, Warszawa, WNT, 1975.
LATEK W., Badanie maszyn elektrycznych w przemyśle, Warszawa, WNT, 1979.
bY TatOR 2009
Wyszukiwarka
Podobne podstrony:
Maszyny Elektryczne Skrypt Polit Krakowska
Maszyny Elektryczne Opracowanie Pytań Na Egzamin
Badanie zabezpieczeń maszyn elektrycznych
MASZYN~8, PŚk, Maszyny elektryczne
88888888, aszyny elektryczne, maszyny elektryczne!!!!!!!!!!!!!, maszyny sciagi
laborki z maszyn elektrycznych
Maszyny elektryczne transformatory
Maszyny Elektryczne Nr 74 2006
4 Maszyny elektryczne
Maszyny 21, PWR ETK, Semestr V, Maszyny elektryczne - Laboratorium, sprawka maszyny
11 Silnik indukcyjny pierścieniowy SUHf, Szkoła, Politechnika 1- 5 sem, SEM IV, Maszyny Elektryczne.
Maszyny Elektryczne Nr 71 2005
polskie normy dotyczące maszyn elektrycznych
Lab Maszyny elektryczne I II ga seria
Maszyny elektryczne
Silnikkrok, Elektrotechnika, Rok 3, Maszyny elektryczne specjalne, specjalne
Opracowanie Maszyny Elektryczne
więcej podobnych podstron