ARCHITEKTURA PROCESORA
Listy rozkazów: własności i funkcje
Elementy rozkazu maszynowego
!"
Kod operacji. Określa operację, jaka ma być przeprowadzona (na
przykład, ADD);
!"
Odniesienie do argumentów źródłowych. Operacja może
obejmować jeden lub wiele argumentów źródłowych, są one danymi
wejściowymi operacji;
!"
Odniesienie do wyniku. Operacja może prowadzić do powstania
wyniku;
!"
Odniesienie do następnego rozkazu. Określa, skąd procesor ma
pobierać następny rozkaz po zakończeniu wykonania bieżącego
rozkazu.
Reprezentacja rozkazu
Rozkaz jest reprezentowany wewnątrz komputera jako ciąg bitów.
Rozkaz dzielony jest na pola odpowiadające elementom składowym
rozkazu.
Prosty format rozkazu
Formaty rozkazów:
!"
sztywne
!"
swobodne
Rodzaje rozkazów:
!"
rozkazy arytmetyczne i logiczne (przetwarzanie danych),
!"
rozkazy pamięciowe (przechowywanie danych),
!"
rozkazy wejścia-wyjścia (przesyłanie danych),
Kod
operacji
Odniesienie do
argumentu
Odniesienie
do argumentu

!"
rozkazy testowania i rozgałęzienia (sterowanie).
Liczba adresów:
!"
rozkazy bezadresowe (działające na stosie),
!"
rozkazy jednoadresowe,
!"
rozkazy dwu- lub trzyadresowe.
Adres następnego rozkazu jest domyślny (uzyskiwany z licznika
programu).
Projektowanie listy rozkazów
Liczba adresów w rozkazie jest podstawową decyzją projektową.
Do najważniejszych problemów projektowania listy rozkazów należą:
Repertuar operacji
;
Rodzaje danych;
Format rozkazu
. Długość rozkazu, liczba adresów, rozmiary pól itp.;
Rejestry
. Liczba rejestrów procesora oraz ich zastosowanie.
Adresowanie
. Tryb lub tryby, w których są specyfikowane adresy
argumentów.
Rodzaje argumentów:
!"
adresy,
!"
liczby (całkowite lub stałopozycyjne, zmiennopozycyjne,
dziesiętne),
!"
znaki,
!"
dane logiczne (Prawda, Fałsz).

Rodzaje danych Pentium:
!"
Ogólne. Lokacje o dowolnej zawartości binarnej obejmujące bajt,
słowo (16 bitów), podwójne słowo (32 bity) lub poczwórne słowo.
!"
Całkowite. Wartości binarne ze znakiem, zawarte w bajcie, słowie lub
podwójnym słowie, w reprezentacji uzupełnienia do dwóch.
!"
Porządkowe. Liczby całkowite bez znaku (bajt, słowo, podwójne
słowo).
!"
Liczba dziesiętna nieupakowana BCD.
!"
Liczba dziesiętna upakowana BCD.
!"
Wskaźnik bliski. 32-bitowy adres efektywny, reprezentujący
przesunięcie wewnątrz segmentu.
!"
Łańcuch bajtów. Sekwencja sąsiadujących bajtów (od zera do 2
32
-1
bajtów).
!"
Zmiennopozycyjne:
pojedynczej precyzji – 32-bitowe słowo, mantysa 24-bity, cecha w
systemie z przesuniętym wykładnikiem;
podwójnej precyzji – 64-bity, mantysa 52-bity;
precyzja rozszerzona – 80-bitów, mantysa 64 bitowa.
Organizacja procesora
Organizacja rejestrów
Rejestry w procesorze można podzielić na dwie grupy:
!"
Rejestry widzialne dla użytkownika;
!"
Rejestry sterowania i stanu.
Rejestry widzialne dla użytkownika:
!"
ogólnego przeznaczenia (ang. general purpose),
!"
danych,
!"
adresowe (wskaźniki segmentu, rejestry indeksowe, wskaźnik stosu).
Znaczniki stanu
Układ przesuwny
Układ
dopełniania
Układy
logiczne i
arytmetyczne
Wew
n
ętrz
n
a
m
ag
is
tral
a
p
ro
ce
so
ra
Jednostka arytmet. - logiczna
Rejestry
Jednostka
sterująca
Ścieżki
sterowania

Rejestry sterowania i stanu
!"
Licznik programu (PC).
!"
Rejestr rozkazu (IR).
!"
Rejestr adresowy pamięci (MAR).
!"
Rejestr buforowy pamięci (MBR).
!"
Słowo stanu programu (ang. program status word – PSW).
W rejestrach PSW występują następujące pola (flagi):
Znak. Bit znaku ostatniej operacji arytmetycznej;
Zero. Flaga ustawiana, gdy wynik równy zeru;
Przeniesienie. Ustawiane, gdy wynikiem operacji jest przeniesienie do
kolejnego słowa (umożliwia realizacje wielokrotnej precyzji);
Przepełnienie. Nadmiar arytmetyczny.
Zezwolenie /blokowanie przerwania. Używane do obsługi przerwań.
Pułapka (ang. Trap).
Tryb procesora. Wskazuje , czy procesor pracuje w trybie nadzorcy,
czy użytkownika.
Wskaźnik do bloku sterowania procesem.
Wskaźnik tablicy stron. Dla systemu pamięci wirtualnej.
itp.
Przykładowe organizacje rejestrów w mikroprocesorach
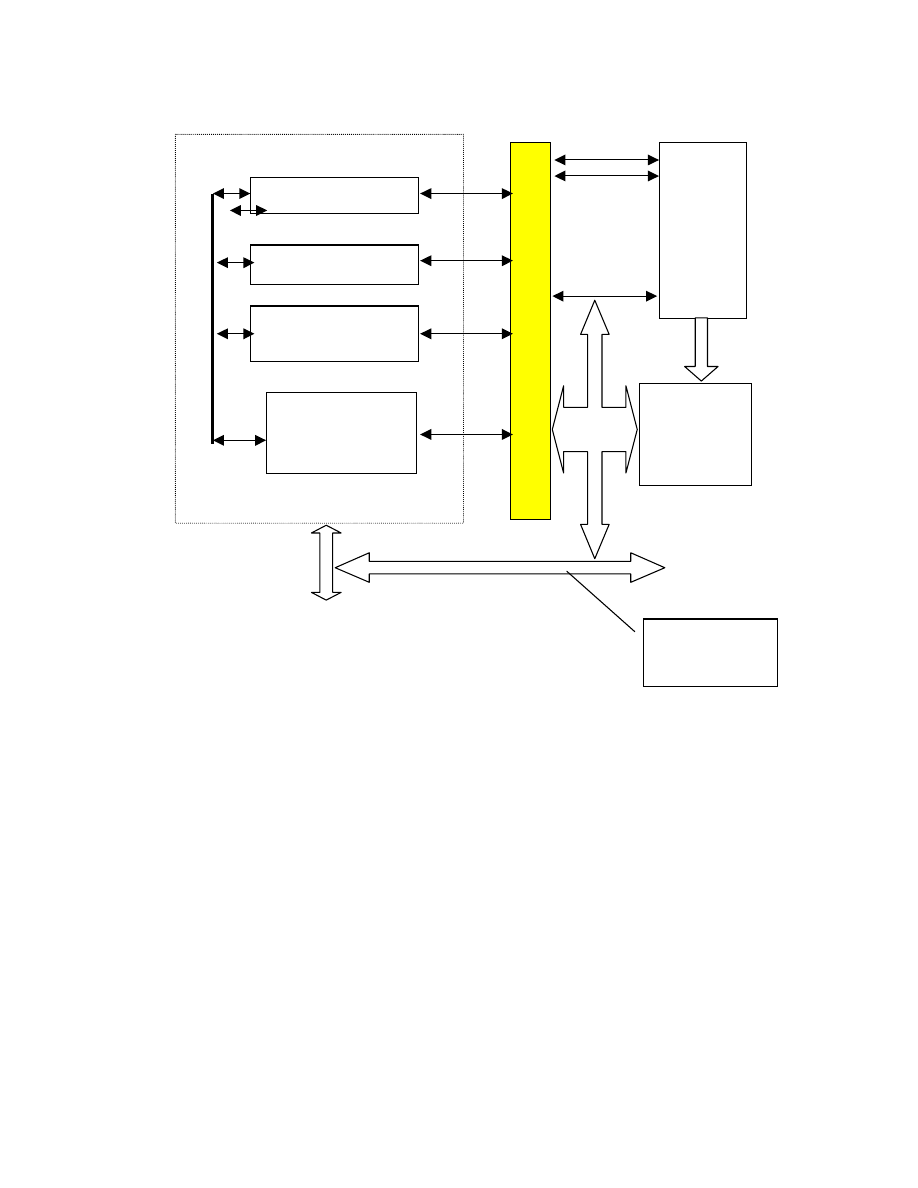
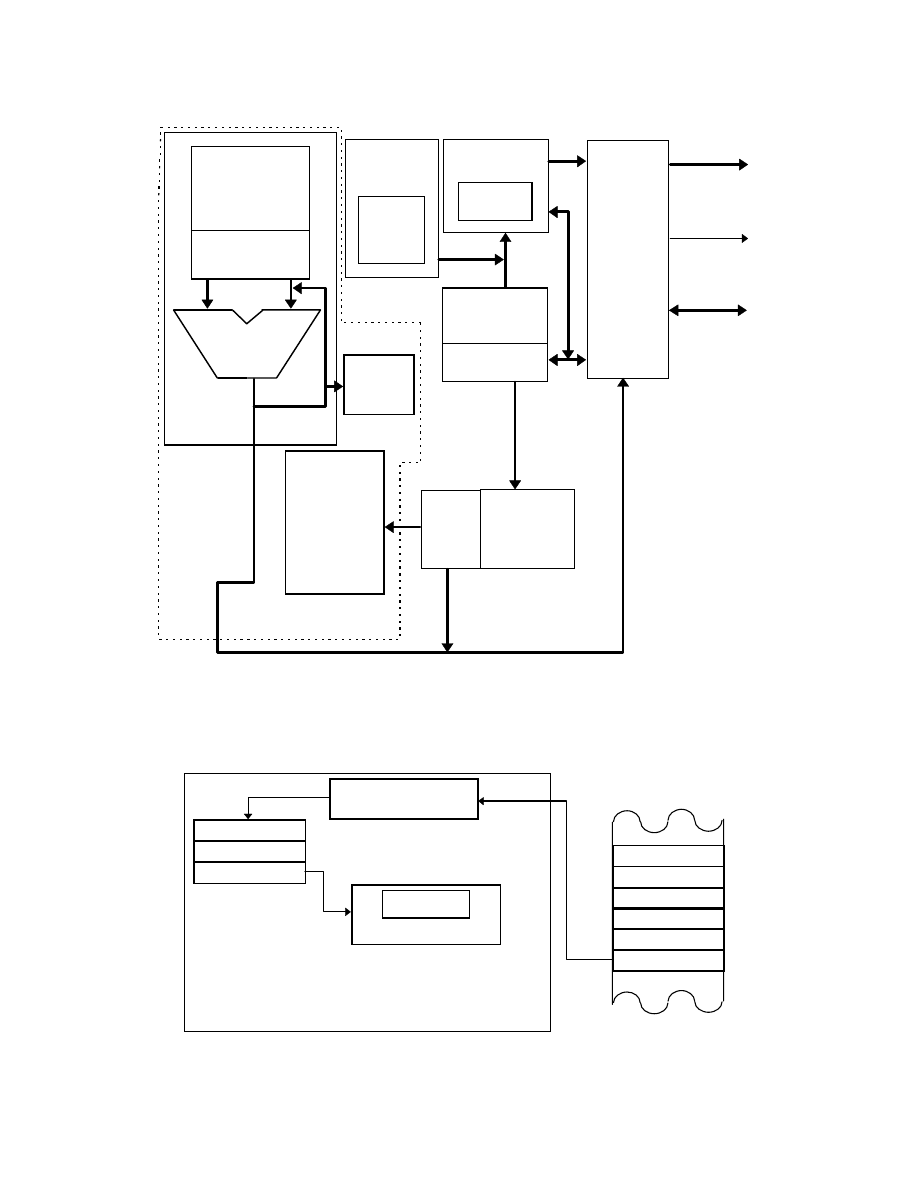
Architektura mikroprocesora 8086
AH
BL
BH
AL
CH
DL
DH
CL
SP
DI
SI
BP
CS
ES
SS
DS
0000
0000
0000
0000
PC
0
7
8
15
AX
BX
CX
DX
0
15
0
15
Magistrala wewnętrzna
Bufor
magistrali
zewnętrznej
6
3
4
5
2
1
Kolejka rozkazów
ALU
Jednostka sterująca
Rejestr znaczników
Rejestr rozkazów
Jednostka sterująca
BIU
Jednostka wykonawcza
EU
0
15

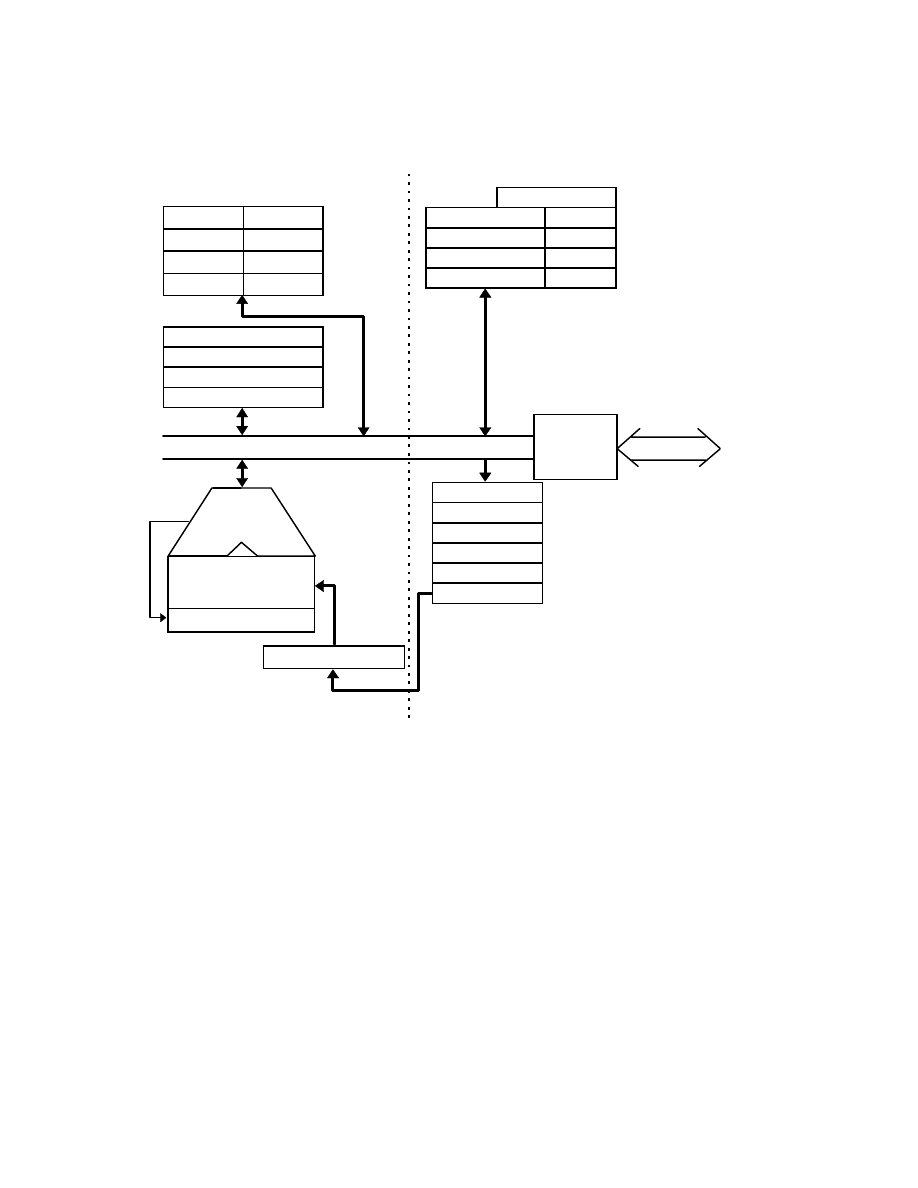
Rejestry mikroprocesora 8086
Mikroprocesor 8086 zawiera 14 szesnastobitowych rejestrów
widocznych dla programisty:
1. Rejestry ogólnego przeznaczenia, służące głównie do przechowywania wyników
pośrednich, ich zawartości mogą być argumentami większości rozkazów:
AX - akumulator; niektóre rozkazy dotyczące tego rejestru wykonują się szybciej
niż na innych rejestrach ogólnych lub są o 1 bajt krótsze.
BX - rejestr bazowy; dodatkowo może być wykorzystany do tzw. adresowania
bazowego - zawiera wówczas przesunięcie (OFFSET) argumentu.
CX - rejestr zliczający lub licznikowy; może być wykorzystywany w rozkazach jako
licznik wykonań - jest wówczas zmniejszany o 1 za każdym wykonaniem i
jego zawartość podlega badaniu, czy nie uległa wyzerowaniu.
DX - rejestr danych, jako jedyny może być wykorzystywany do adresowania
obiektów w przestrzeni adresowej wej/wyj (portów) w rozkazach wej/wyj, a
także w rozkazach o argumentach lub wynikach długości większej niż jedno
słowo (np. rozkazy mnożenia lub dzielenia).
Szesnastobitowe rejestry ogólnego przeznaczenia mogą być interpretowane
jako pary rejestrów ośmiobitowych stanowiących mniej i bardziej znaczącą część
rejestru szesnastobitowego. Identyfikator rejestru stanowiącego mniej znaczącą
część rejestru ogólnego kończy się na L, zaś identyfikator rejestru stanowiącego
bardziej znaczącą część rejestru ogólnego kończy się na H. Argumentami
rozkazów mogą być zarówno rejestry ogólne jako całość, jak i ich ośmiobitowe
części.
0
7
8
15
0
15
IP
SP
BP
SI
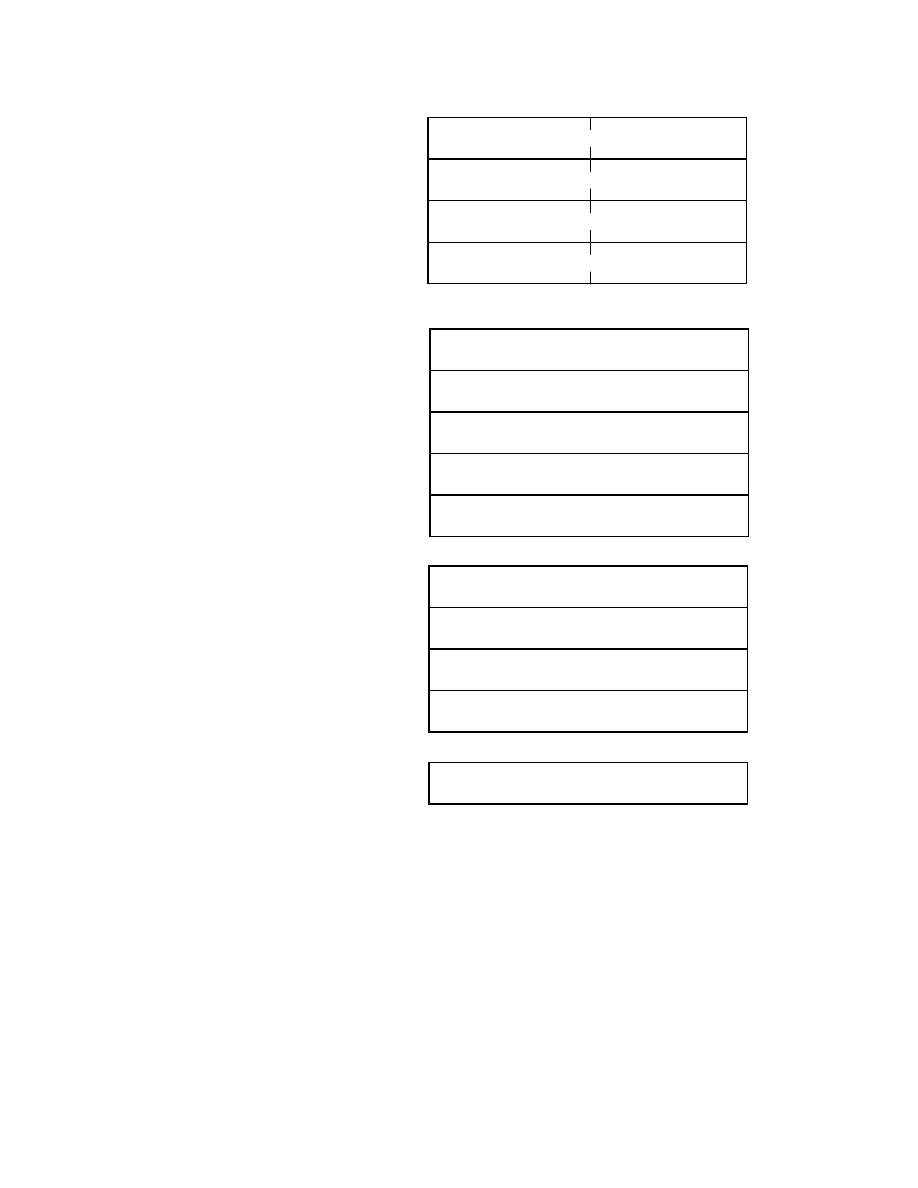
Rejestry adresowe
Wskaźnik rozkazu
Wskaźnik wierzchołka stosu
Wskaźnik bazy
Indeks źródła
DI
Indeks celu
0
15
CS
SS
DS
ES
Rejestry segmentowe
Segment kodu programu
Segment stosu
Segment danych
Segment dodatkowy
0
15
F
Rejestr znaczników (flag)
AH AX AL
BH BX BL
CH CX CL
DH DX DL
Rejestry ogólnego przeznaczenia
Akumulator
Rejestr bazowy
Rejestr zliczający
Rejestr danych
Rejestry mikroprocesora 8086
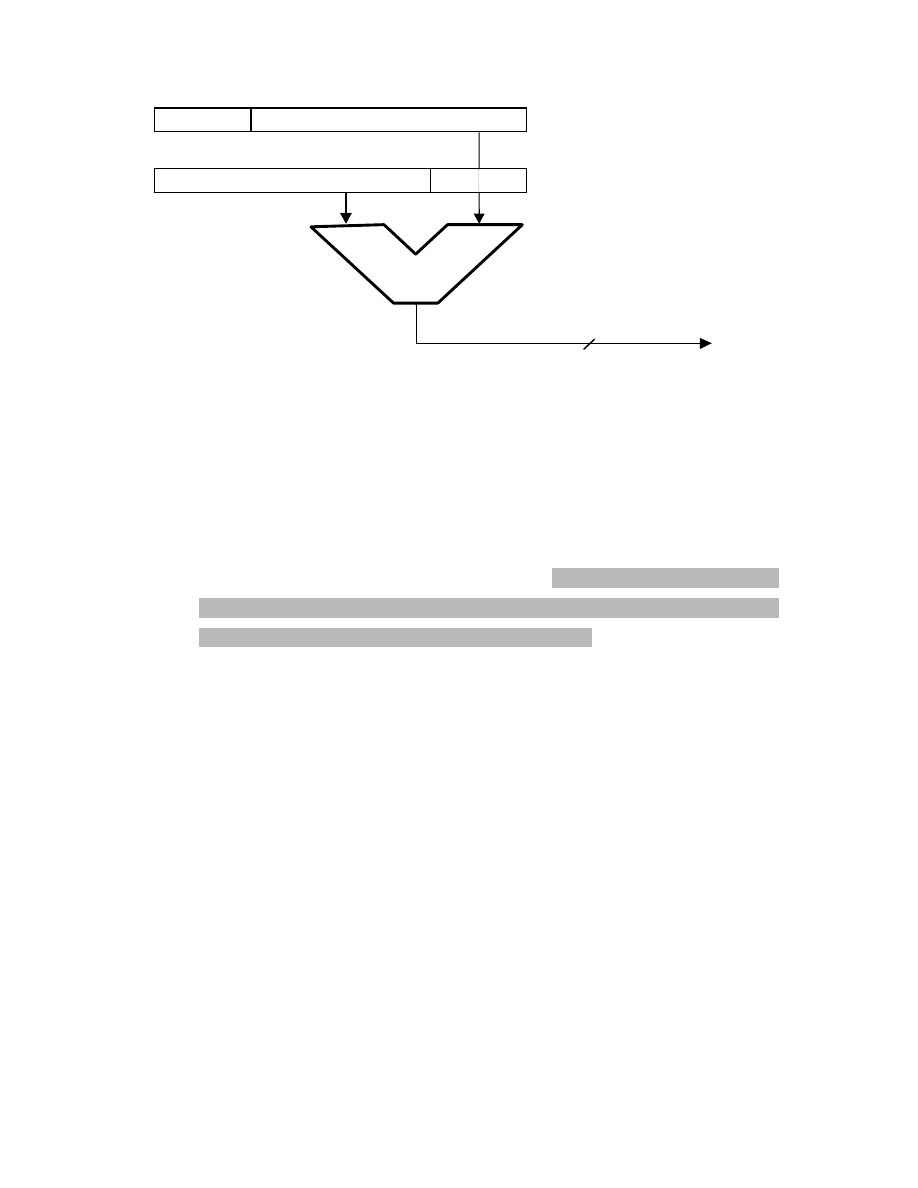
∑
Przemieszczenie
0 0 0 0
Segment
0 0 0 0
Adres efektywny
Adres bazowy segmentu
0
0
15
15
Adres fizyczny
20 bitowy
2. Rejestry adresowe, służące głównie do przechowywania adresów względnych
(OFFSET), chociaż mogą być też wykorzystywane jako rejestry robocze -
możliwości użycia ich zawartości jako argumentów rozkazów są tylko w niewielkim
stopniu ograniczone w porównaniu z rejestrami ogólnego przeznaczenia:
IP - wskaźnik rozkazu (ang. instruction pointer), zawiera zawsze adres względny
(względem początku segmentu określonego przez zawartość rejestru CS)
aktualnie pobieranego do wykonania rozkazu, rejestr ten stanowi z punktu
widzenia programisty (wraz z rejestrem CS) część licznika rozkazów;
rejestr IP nie może być zmieniany przez program.
SP - wskaźnik wierzchołka stosu; zwykle zawiera adres względny (względem
początku segmentu określonego przez zawartość rejestru SS) wierzchołek
stosu, tzn. adres ostatniego słowa odłożonego na stosie; w przypadku
pisania programów przeznaczonych do pracy pod kontrolą systemu
operacyjnego należy rejestrem SP posługiwać się ze szczególną
ostrożnością.
BP - rejestr wskaźnika bazy; zwykle zawiera adres względny (względem początku
segmentu określonego przez zawartość rejestru SS) parametrów odłożonych
na stosie (dla procedur w językach wysoko poziomowych); rejestr BP może
być wykorzystany także do innych celów.
SI - rejestr indeksu źródła (miejsca, z którego pobierane są dane w operacjach
przesyłania danych); zwykle zawiera adres danych względem początku
segmentu określonego zawartością rejestru DS; rejestr SI wykorzystywany
jest do tzw. adresowania indeksowego oraz w rozkazach łańcuchowych

(operacjach na ciągach znaków), może też być wykorzystany do innych
celów.
DI - rejestr indeksu celu; zwykle zawiera adres danych względem początku
segmentu określonego zawartością rejestru DS; rejestr DI wykorzystywany
jest do tzw. adresowania indeksowego oraz w rozkazach łańcuchowych - w
tym przypadku jednak zawiera adres względem początku segmentu
określonego zawartością rejestru ES, może też być wykorzystany do innych
celów.
3.
Rejestry segmentowe służą do przechowywania wartości (SEGMENT)
określających adresy początkowe segmentów przy odwołaniach do pamięci:
CS - rejestr segmentu kodu programu określa adres początku segmentu używany
w przypadku wszystkich dostępów do pamięci z adresowaniem względnym za
pomocą rejestru IP, tzn. pobierania rozkazów. Z punktu widzenia
programisty rejestr CS razem z rejestrem IP tworzy licznik rozkazów
mikroprocesora 8086 (CS:IP).
SS - rejestr segmentu stosu programu określa adres początku segmentu używany
w przypadku wszystkich dostępów do pamięci z adresowaniem względnym za
pomocą rejestru SP lub BP, jeśli zadano wykorzystanie tego rejestru, tzn. BP
specjalnym rozkazem.
DS - rejestr segmentu danych określa adres początku segmentu używany w
przypadku wszystkich dostępów do pamięci danych (np. za pomocą rejestrów
BX, SI, DI lub za pomocą adresu podanego bezpośrednio w rozkazie).
ES - rejestr segmentu danych określa adres początku segmentu używany w
przypadku wszystkich dostępów do pamięci danych w rozkazach
łańcuchowych - działania na ciągach adresowanych za pomocą rejestru DI.
Rejestry segmentowe mogą być argumentami wyłącznie rozkazów przesłania
MOV, PUSH i POP.
4. Rejestr znaczników F jest konstrukcją składającą się z szeregu jednobitowych
rejestrów określających stan procesora. Rejestr znaczników zawiera tzw. słowo
stanu. Słowo stanu ma postać jak na rys.
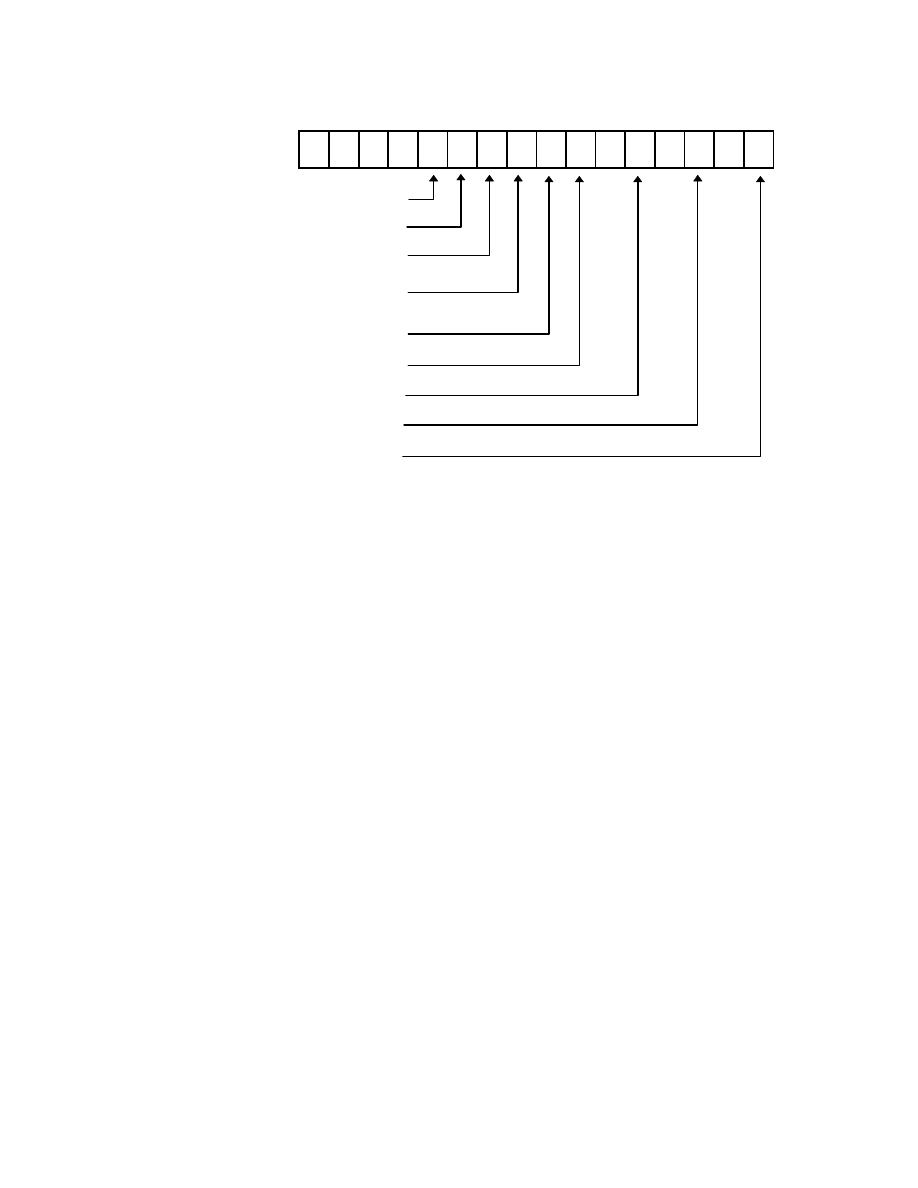
X
X
X
X OF DF IF TF
ZF
X
AF X
PF
X CF
SF
15 14 13 12 11 10
9
8
6
5
4
3
2
1
0
7
nadmiar
kierunek
maska przerwań
maska przerwań po każdym
rozkazie
wskaźnik ujemnego wyniku
wskaźnik wyniku zerowego
przeniesienie pomocnicze
wskaźnik parzystości
przeniesienie
Słowo stanu mikroprocesora 8086
Poszczególne bity rejestru wskaźnika dzielą się na dwie grupy:
1. Wskaźników określających sposób działania procesora:
TF - bit 8, powoduje (stan 1) przerwanie nr. 3, z jednoczesnym zgaszeniem TF, po
wykonaniu jednego rozkazu - wykorzystywany przez specjalistyczne
oprogramowanie uruchomieniowe;
IF - bit 9, zezwala (stan 1) na przyjmowanie przerwań zewnętrznych; wyzerowanie
tego bitu powoduje zablokowanie przyjmowania przerwań zewnętrznych, poza
tzw. przerwaniem niemaskowalnym (NMI);
DF - bit 10, określa czy zawartości rejestrów SI i DI w trakcie wykonywania
rozkazów łańcuchowych mają być zwiększane (DF=0), czy zmniejszane
(DF=1).
2. Wskaźników ustawianych w wyniku wykonywania różnych rozkazów:
CF - wskaźnik przeniesienia globalnego, zmieniany rozkazami arytmetycznymi i
przesunięć, zerowany rozkazami logicznymi;
OF - wskaźnik nadmiaru, zmieniany rozkazami arytmetycznymi i zerowany
rozkazami logicznymi; OF jest zmieniany również w rozkazach przesunięć,
których drugi argument jest równy 1;
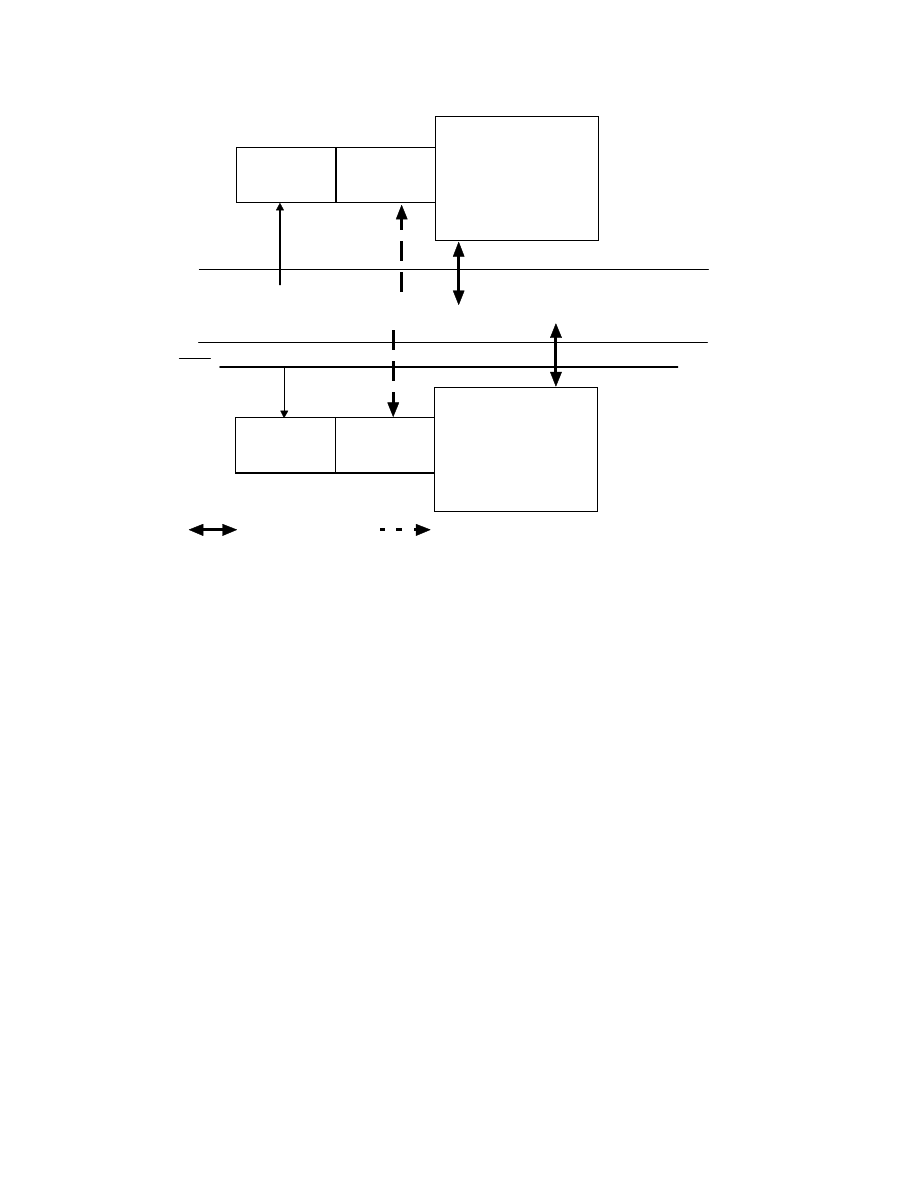
Układ wyboru
banku pamięci
A0
Dekoder
adresów
A1...A19
1
Bank pamięci
zawierający mniej
znaczące bajty
D0...D7
Układ wyboru
banku pamięci
Dekoder
adresów
A1...A19
2
D0...D7
Bank pamięci
zawierający bardziej
znaczące bajty
Multipleksowana
szyna adresów i
danych
AD8...AD15
AD0...AD7
BHE
A1...A19
A1...A19
A0
Szyna danych
Szyna adresowa
Organizacja pamięci w systemie z mikroprocesorem 8086

SF - wskaźnik znaku (ujemnego wyniku), zmieniany rozkazami arytmetycznymi i logicznymi;
ZF - wskaźnik zera wyniku, zmieniany rozkazami arytmetycznymi i logicznymi;
PF - wskaźnik parzystej liczby jedynek w zapisie binarnym wyniku, zmieniany rozkazami arytmetycznymi i logicznymi;
AF - wskaźnik przeniesienia pomocniczego (z bitu 3 na 4) ustawiany na potrzeby rozkazów arytmetyki dziesiętnej.
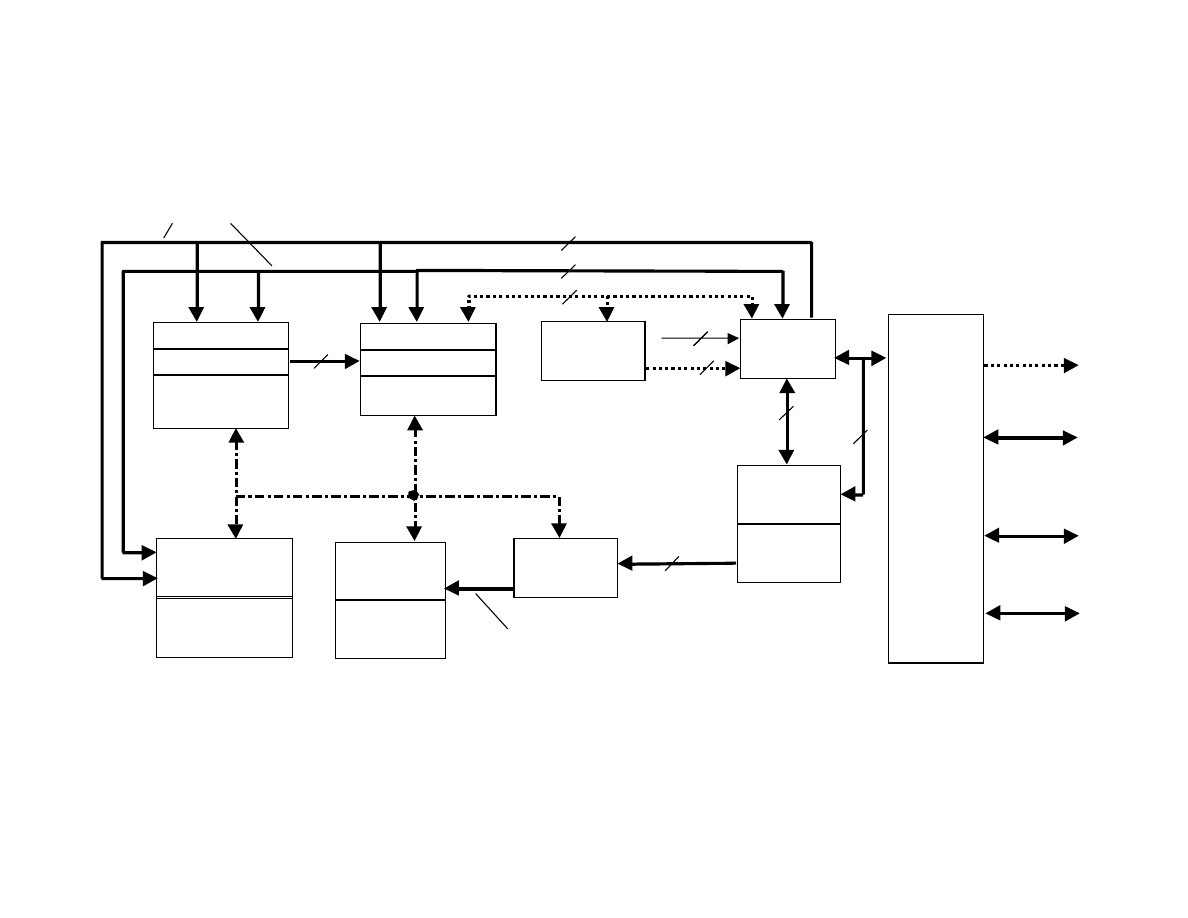
Ste-
rowa-
nie
Sterowanie magistrali
S1, S0, COD/ INTA
LOCK, HLDA
Sumator
przemieszczenia
Sumator
adresów
fizycznych
Bazy
segmentów
Rozmiary
segmentów
Kontrola
ograniczeń
Blok
generacji
adresów
ALU
Blok
rejestrów
roboczych
Blok przetwarzania
Kolejka zdekodowanych
rozkazów
Dekoder
rozkazów
Blok
dekodera
Zatrzaskujące bufory adresów
Układ
wprowadzania
rozkazów
Interfejs
z układami
rozszerzającymi
(koprocesorami)
Bufory danych
6-bajtowa
kolejka
rozkazów
A23....A0
BHE,M / IO
PEACK
PEREQ
READY, HOLD
D15...D0
RESET
CLK
GND
U
CC
CAP
BUSY
ERROR
INTR
NMI
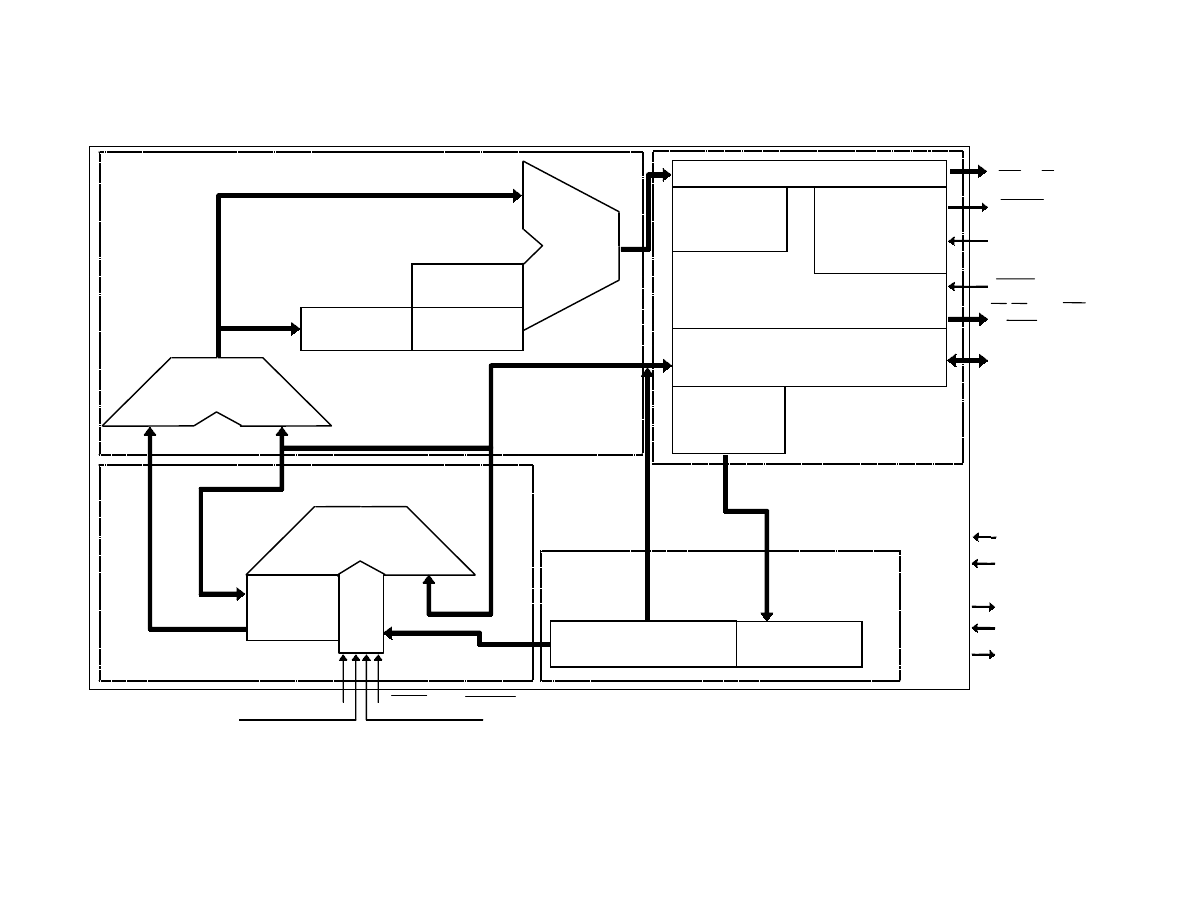
Blok
interfejsu
Schemat blokowy mikroprocesora 80286.
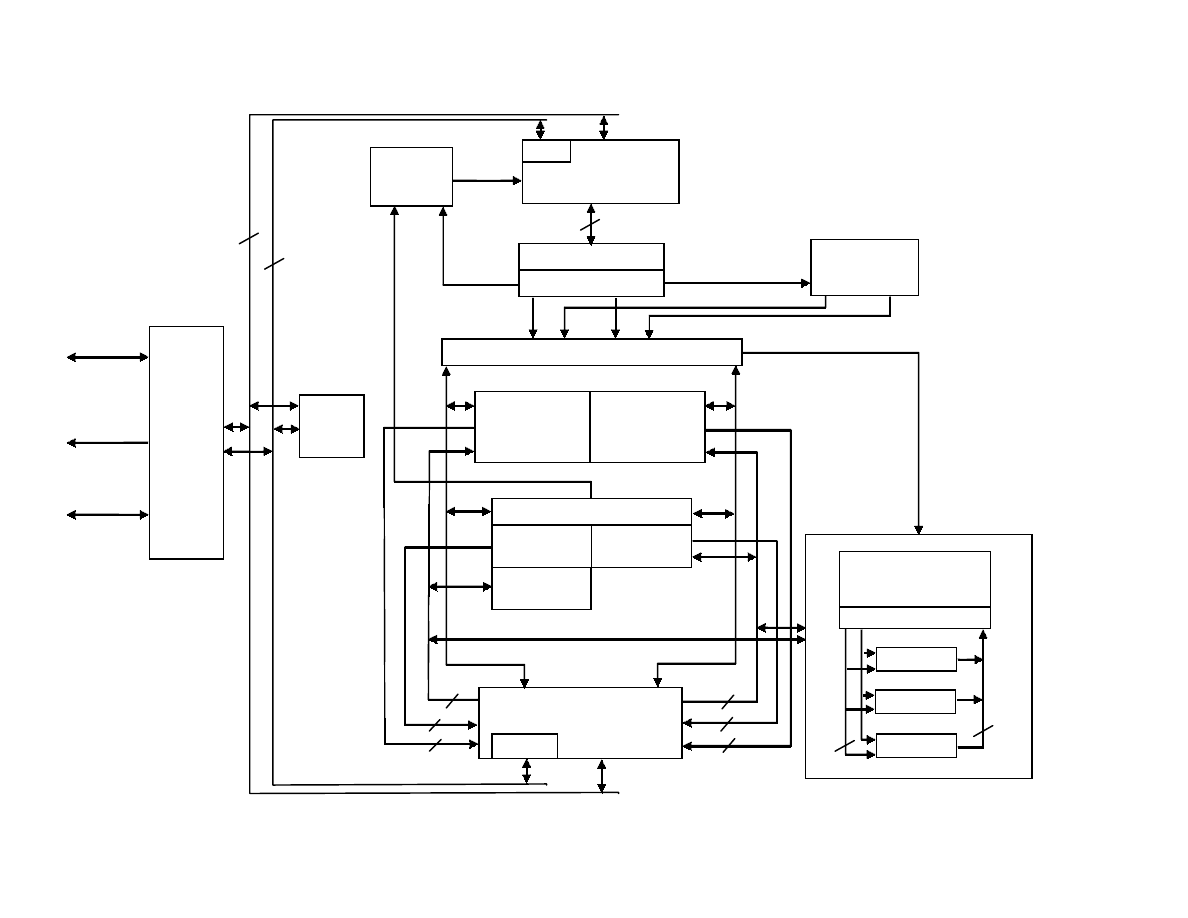
Dane
ALU
Zestaw
rejestrów
Rejestr
przesuwający
Blok
segmentacji
Tablica
deksry-
ptorów
Blok
interfejsu
Sterowanie
Adresy
Blok
wprowadzania
Kolejka
rozkazów
Dekoder
rozkazów
Kolejka
Sterowanie
Blok
kontroli
dostępu
Blok prze-
twarzania
danych
Blok programu
Blok
stronicowania
TLB
Schemat funkcjonalny mikroprocesora 80386.
Mikroprocesor
Rozkaz n+2
Rozkaz n
Rozkaz n+1
Blok wyprzedzającego
wprowadzania
Rozkaz n-1
Dekoder rozkazów
Rozkaz n-2
Rozkaz n
Rozkaz n-1
Rozkaz n+1
Rozkaz n+3
Rozkaz n+2
Pamięć programu
Mechanizm wyprzedzającego wprowadzania kodów rozkazów.
Układ przesuwania
Blok rejestrów
ALU
Blok segmentacji
Deskryptory
Długości segmentów
i prawa dostępu
Blok
stronnicowania
Blok pamięci
Cache
Kolejka
rozkazów
Blok
wprowadzania
Dekoder
instrukcji
Jednostka
zmiennopozycyjna
Blok rejestrów
zmiennopozycyjnych
Blok
interfejsu
szyny
Sterowanie
Pamięć
mikroprogramów
20
32
32
32
2
128
Adres fizyczny
Szyna adresu liniowego
32
24
Zdekodowane
instrukcje
Strumień
instrukcji
PCD, PWT
32
Adres A2..A31
Dane D0..D31
Sterowanie
JTAG
mikroinstrukcje
Szyna danych
Szyna danych
64-bitowa wewnętrzna szyna danych
Schemat blokowy mikroprocesora 80486.
Kolejka rozkazów
Dekoder instrukcji
Jednostka sterująca
Blok rejestrów
Bufor
kierunku
skoków
TLB
Cache programu
8 KB
Cache danych
8 KB
TLB
Układ generacji
adresów
(potok U)
Układ generacji
adresów
(potok V)
ALU
(potok U)
ALU
(potok V)
Rejestr
przesuwny
Blok
stroni-
cowania
256
Wskaźnik
instrukcji
Pamięć
mikroinstrukcji
ROM
Blok
interfejsu
64-bitowa
szyna
danych
32-bitowa
szyna
adresowa
Sterowanie
Jednostka zmienno-
przecinkowa
Blok rejestrów
Dodawanie
Dzielenie
Mnożenie
80
80
64-bitowa
szyna
danych
32-bitowa
szyna
adresowa
32
32
32
32
32
32
Schemat blokowy
mikroprocesora Pentium
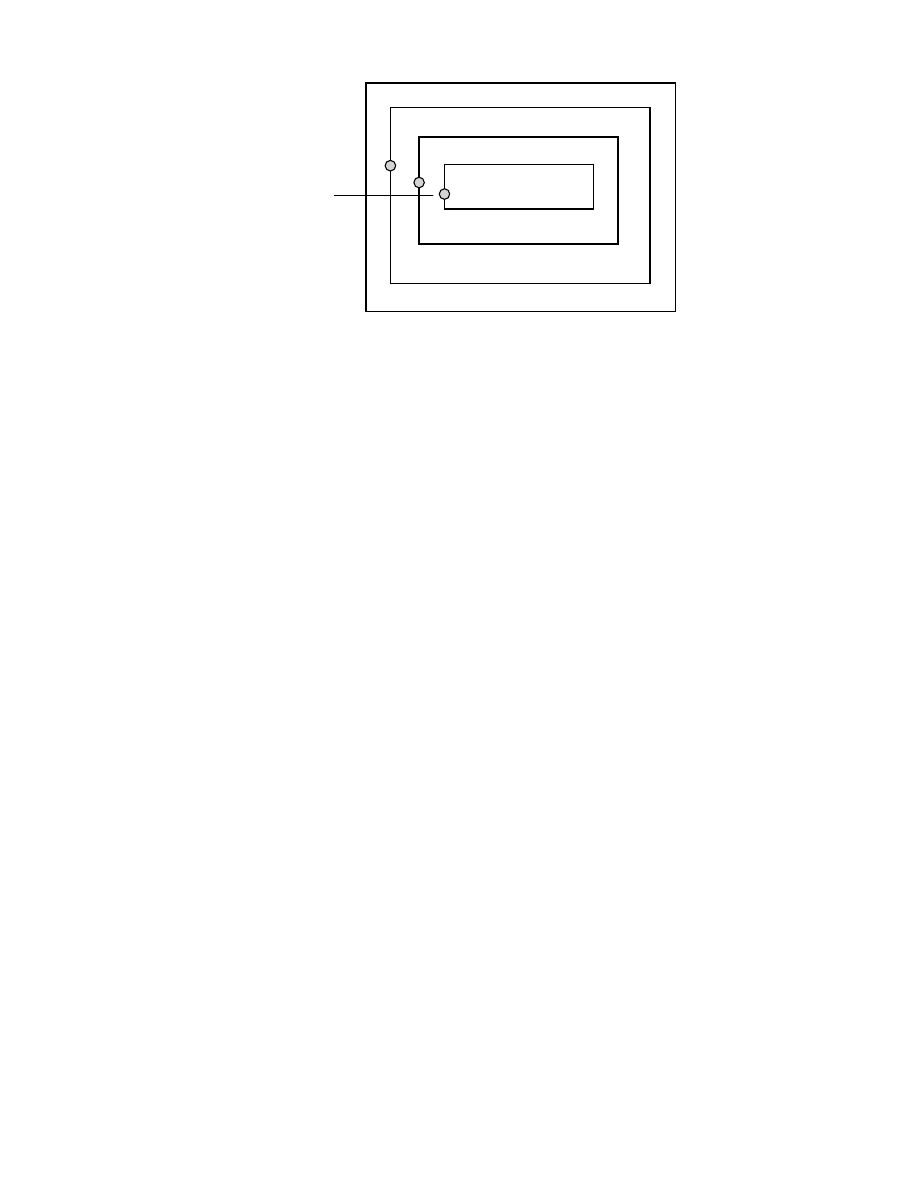
18
Rozszerzenie systemu operacyjnego
PL = 2
Jądro
PL = 0
Usługi systemowe
PL = 1
Zadania użytkowe
PL = 3
Interfejsy
programowe
realizowane
przez CPU.
Hierarchiczny system poziomów uprzywilejowania.

19
Organizacja rejestrów procesora PENTIUM
Rodzaje rejestrów:
!"
Ogólnego przeznaczenia (robocze). Występuje 8 32-bitowych
rejestrów ogólnego przeznaczenia;
!"
Segmentowe. Sześć 16-bitowych rejestrów segmentowych zawiera
selektory segmentu służące jako indeksy w tablicach segmentów.
!"
Znaczniki stanu. Rejestr EFLAGS zawiera kody warunkowe i różne
bity trybu.
!"
Wskaźnik rozkazu. Zawiera adres bieżącego rozkazu.
!"
Rejestry do współpracy z jednostką zmiennopozycyjną:
numeryczne – 8 rejestrów 80-bitowych, dostępnych jako stos; rejestr
sterowania – 16-bitowy rejestr sterowania;
rejestr stanu;
słowo wyróżników.
20
Rejestry sterowania
Pentium wykorzystuje cztery 32-bitowe rejestry sterowania CR0, CR2,
CR3, CR4.
Rejestr CR0 zawiera znaczniki stanu sterowania systemowego, które
sterują trybami lub wskazują stany odnoszące się raczej do procesora
niż do wykonywanego programu. Znaczniki te są następujące:
Zezwolenie ochrony (PE). Włącza lub blokuje tryb chroniony.
Monitorowanie koprocesora (MP).
Emulacja (EM). Ustawiany, gdy procesor nie ma jednostki
zmiennopozycyjnej.
Błąd numeryczny (NE). Umożliwia standardowy mechanizm zgłaszania
błędów zmiennopozycyjnych na zewnętrznych liniach danych.
Ochrona zapisu (WP). Gdy ten bit jest zerem, strony tylko do odczytu
na poziomie uprzywilejowania użytkownika mogą być zapisane przez
program nadzorczy (SO).
Brak zapisu jednoczesnego (NW). Wybiera tryb pracy pamięci
podręcznej danych. Gdy bit ten jest ustawiony, operacje zapisu
jednoczesnego pamięci podręcznej są zablokowane.
Blokowanie pamięci podręcznej (CD). Włącza lub blokuje mechnizm
zapełniania wewnętrznej pamięci podręcznej.
Rejestr CR2 służy do przechowania 32-bitowego adresu liniowego
ostatniej strony, która spowodowała błąd strony.
Rejestr CR3 (20 bardziej znaczących bitów) – adres podstawowego
katalogu stron.
W rejestrze CR4 jest zdefiniowanych 6 dodatkowych bitów kontrolnych.

21
Komputery o złożonej liście rozkazów (CISC)
Charakteryzowały się stosowaniem bogatej listy rozkazów, które
zawierały zarówno większą liczbę rozkazów, jak i rozkazy bardziej
złożone.
Powody takiej tendencji:
- dążenie do uproszczenia kompilatorów (architekci dążyli do
zaprojektowania maszyn, które zapewniałyby lepsze wsparcie
języków wysokiego poziomu),
- dążenie do poprawy wydajności
Własności architektur o zredukowanej liście rozkazów (RISC)
!"
Jeden rozkaz na cykl
!"
Operacje typu „z rejestru do rejestru”
!"
Proste tryby adresowania
!"
Proste formaty rozkazów
22
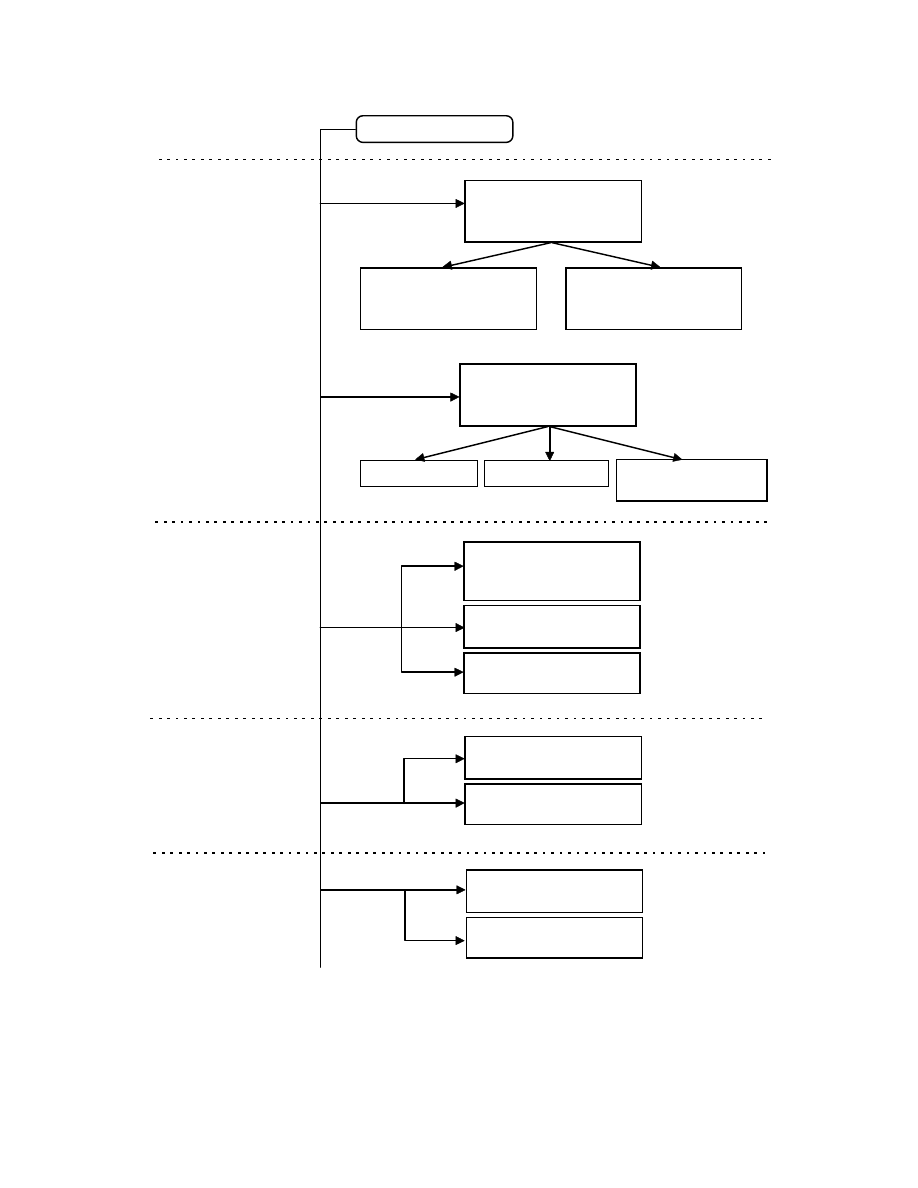
Układy wej / wyj
Układy współpracujące
z klawiaturami
i wskaźnikami
Układy sterujące
minitory ekranowe
Układy sterujące
dyski elastyczne
Programowane układy
sterowania przerwań
Układy sterowania
kanału DMA
Programowane
liczniki
Układy
wielofunkcyjne
Układy służące do
równoległego
przesyłania informacji
Programowane
układy wej / wyj
Proste układy typu:
- rejestr zatrzaskowy;
- bufor.
Układy służące do
szeregowego przesyłania
informacji
Synchroniczne
Asynchroniczne
Synchroniczne
i asynchroniczne
Podstawowe
uniwersalne
układy wej / wyj
Specjalizowane
układy wej / wyj
Układy
sterujące
Inne
układy
Układy wej / wyj współpracujące z monitorem
23
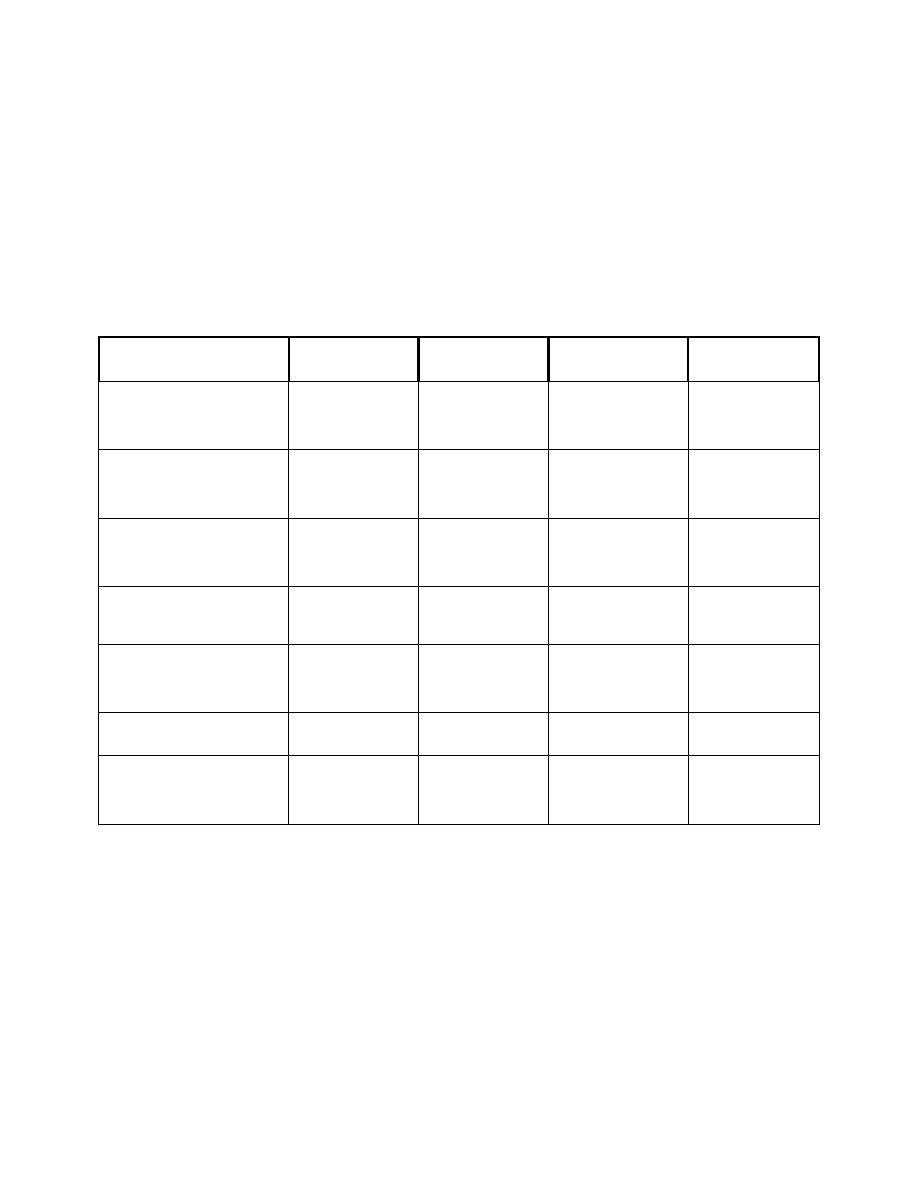
Porównanie parametrów procesorów PENTIUM
Wyszczególnienie
Pentium
Pentium Pro
Pentium MMX
Pentium II
Częstotliwość procesora
[MHz]
75 - 200
150 - 200
166/200/233 233-400
Częstotliwość magistrali
[MHz]
50/60/66 60/66
66
66
Szerokość magistrali
wewnętrznej
64-bity 64-bity 300-bitów 300
Pamięć podręczna L1 [KB]
8 + 8
/rozkazy+dane/
8 + 8
/rozkazy+dane/
16 + 16
/rozkazy+dane/
16 + 16
/rozkazy+dane/
Częstotliwość magistrali
pamięci L1 [MHz]
75 - 200
150-200
166/200/233 233-400
Pamięć podręczna L2 [KB]
----------- 256/512 ------------ 512
Częstotliwość magistrali
pamięci L2 [MHz]
-----------
150-200 ------------
Częstotliwość L1 /
2

24
Potokowe przetwarzanie danych (Pipelining).
Mechanizm ten pozwala procesorowi na rozbicie pojedynczego rozkazu na
kilka-kilkanaści części - etapów, które są następnie przetwarzane potokowo niczym
na taśmie produkcyjnej. Im więcej etapów, tym na pojedynczy etap przypada
mniejszy zakres zadań i może zostać zastosowana większa częstotliwość
taktowania. Każde z typów zadań ma przydzieloną oddzielną jednostkę do jego
wykonywania. Każda jednostka rozwiązuje tylko jeden, określony typ zadań i wyniki
przekazuje do następnego etapu. W rezultacie uzyskuje się wzrost prędkości
roboczej procesora.
Superskalarność
Jest to właściwość procesorów, w których jest więcej niż jeden potok. Procesor
przydziela realizację określonych instrukcji wolnym w danym momencie potokom,
przy jednoczesnym usuwaniu zależności pomiędzy poszczególnymi instrukcjami, aby
uniknąć zbędnego oczekiwania. W wyniku tego żaden z rozkazów znajdujących się
w potoku nie musi oczekiwać na wynik realizacji rozkazu w innym potoku i
wstrzymywać przetwarzania pozostałych poleceń.
Dynamiczne wykonywanie rozkazów (Dynamic Execution).
Pod tym pojęciem kryje się kombinacja trzech technik, po raz pierwszy
zastosowana w Pentium Pro, dzięki którym procesor osiąga znaczny wzrost
wydajności. Są to:
•
mechanizm prognozowania rozgałęzień,
•
analiza przepływu danych,
•
spekulacyjne wykonywanie rozkazów.
Mechanizm prognozowania rozgałęzień.
Zadaniem tego mechanizmu jest przewidywanie miejsca gdzie nastąpi skok po
wykonaniu rozkazu warunkowego. Działanie mechanizmu polega na porównywaniu i
analizie sekwencji rozkazów na poszczególnych etapach potoku. Dzięki czemu jest
on wstanie z dużym prawdopodobieństwem określić, które rozgałęzienie zostanie
wybrane oraz która sekwencja rozkazów będzie przetwarzana jako kolejna, po czym
kontynuuje wykonywanie programu od tego miejsca. Efektywność tego mechanizmu
w praktyce sięga 90%.

25
Analiza przepływu danych
Jest to jeden z mechanizmów dynamicznego wykonywania rozkazów w
procesorze. Polega na analizie i ustalaniu optymalnej kolejności wykonywania
instrukcji. Analizując przepływające dane procesor sprawdza i określa, czy kolejne
rozkazy są dostępne i czy mogą być wykonane, tzn. czy ich realizacja nie jest
zależna od wyników aktualnie wykonywanych rozkazów.
Spekulacyjne wykonywanie rozkazów (Speculation Execution).
Jest to mechanizm, który pozwala rozpocząć wykonywanie rozkazu wcześniej,
niż to wynika z normalnej sekwencji rozkazów. Procesor wykonuje następne rozkazy,
mimo że czeka na wynik realizowanej równolegle instrukcji skoku. Jeśli za pomocą
mechanizmu prognozowania skoków, procesor prawidłowo ocenił adres skoku,
przyjęta spekulacyjnie koncepcja jest właściwa i przynosi w efekcie duży wzrost
wydajności. Wyniki przetwarzania spekulacyjnego są przetrzymywane chwilowo w
buforze ROB (Re-Order Buffer).
Bufor translacji adresów TLB (Translation Lookside Buffer).
Jest to element pamięci podręcznej, w którym przechowywane są ostatnio
używane odwołania do tablicy pamięci podręcznej. Używany jest do przyspieszenia
wyznaczania adresu fizycznego pamięci. Jeżeli odwołanie do pamięci wykorzystuje
informację zawartą w TLB to czas translacji adresu wynosi tylko pół taktu zegara.
Łączny czas przetwarzania adresu logicznego na fizyczny (wyliczenie adresu
efektywnego, segmentacja i stronicowanie) zajmuje wówczas 2 takty zegara.
Procesor ma zwykle dwa bufory tego typu: jeden dla pamięci podręcznej danych,
drugi dla pamięci podręcznej rozkazów.
Bufor rozgałęzień (Branch target buffer).
Jest to pamięć skojarzeniowa o nie wielkiej pojemności (zwykle 128-512
pozycji) będąca elementem mechanizmu prognozowania rozgałęzień, której
zadaniem jest prognozowanie skoków w programie. Wykorzystując złożone
algorytmy śledzi ona zawartość pamięci podręcznej programu i wskazuje, opierając
się na historii skoków, który rozkaz powinien być pobrany w następnej kolejności.

26
Przekazywanie danych (Data forwarding).
Jest to mechanizm, którego działanie polega na przekazaniu danych
odczytanych z pamięci na żądanie jednej instrukcji wszystkim instrukcjom, które ich
żądają a są przetwarzane w innych potokach. Przekazaniem danych steruje
procesor. Dzięki niemu uzyskuje się dane dla kilku instrukcji, przy jednokrotnym
dostępie do pamięci. Mechanizm ten realizuje również czynność przekazania wyniku
operacji z jednego potoku do instrukcji przetwarzanej w drugim potoku w sposób
bezpośredni, tzn. bez zapisu do pamięci czy rejestrów. Mechanizm ten może być
stosowany w procesorach superskalarnych.
Wyszukiwarka
Podobne podstrony:
Architektura5 id 67923 Nieznany (2)
Architektura3 id 67919 Nieznany (2)
Architektura2 id 67918 Nieznany
ArchitekturaKomputera2 id 67926 Nieznany (2)
Architektura6 id 67924 Nieznany (2)
ArchitekturaKomputera id 67925 Nieznany
PEK PB OPIS ARCHITEKTURA id 354 Nieznany
Architektura1 id 67917 Nieznany (2)
Architektura5 id 67923 Nieznany (2)
Architektura3 id 67919 Nieznany (2)
architektura aplikacji id 67748 Nieznany (2)
Architektura Neutrino 1 id 6791 Nieznany (2)
Architektura Komp2 id 67910 Nieznany (2)
Architektura ekoczasu id 67766 Nieznany (2)
5 Architektura MCU 2010 id 4004 Nieznany (2)
ARCHITEKTURA KOMPUTEROW id 6779 Nieznany (2)
Architektura Renesansu id 67864 Nieznany (2)
Architektura Komp5 id 67913 Nieznany (2)
Architektura drewniana 2 id 677 Nieznany (2)
więcej podobnych podstron