
WYKŁAD 15 i 16
Podstawy programowania w języku MATLAB
Patrz przykłady zamieszczone na tej stronie:
prog1.m ... prog7.m
oraz
cw_0.m ... cw_12.m
Tomasz Zieliński
KOMPILATOR vs. INTERPRETER
(przypomnienie)
C/C++
=
kompilatory
• tłumaczą od razu cały program na kod maszynowy
• potem dopiero program jest wykonywany
• stosowane kiedy jest już znany algorytm rozwiązania
Basic
=
interpretery
Matlab
• tłumaczona i wykonywana jest linia po linii programu
• stosowane kiedy jest poszukiwany algorytm rozwiązania
Zalety
Wady
Kompilator
• S
zybkie działanie programu
•
Możliwość optymalizacji kodu
programu, np. minimalizacji
potrzebnej pamięci
Długa droga do pomysłu do
jego weryfikacji
Interpreter
Krótka droga do pomysłu do
jego weryfikacji
Wolne działanie programu
PRACA NAD PROGRAMEM: kompilator vs. interpreter
Linker
Edytor tekstu
prog.c
KOMPILATOR
programu
prog.obj
my.lib
prog.exe
Lib Maker
Konsolidator
f1.obj, f2.obj,
...
system.lib
System
operacyjny
wykonanie
całego
programu
my.dll
statyczne (lib)
i dynamiczne (dll)
dołączanie bibliotek
Interpreter
linii
INTERPRETER to oddzielny program / aplikacja
INTERPRETER
linii
Egzekutor
linii
Edytor
linii
Program
czyli zbiór linii
1
2
1
2
>> ...?... (CR)
system.dll
SZYBKOŚĆ PISANIA vs. SZYBKOŚĆ DZIAŁANIA
Asembler
czas napisania i
uruchamiania
(usunięcia błędów)
programu
czas
wykonania
programu
Język C/C++
Matlab
Simulink
WNIOSEK:
♦ kiedy poszukuję rozwiązania problemu, wybieram język wysokiego
poziomu, nawet graficzny, z dużą liczbą bibliotek (
szybko piszę program,
który wolno działa
)
♦ kiedy znam rozwiązanie problemu wybieram język niskiego poziomu
(
wolno piszę program, który szybko działa
)

ZALETY MATLABA:
1)
Obliczenia numeryczne (inżynierskie):
• zapis wektorowo-macierzowy: A*x = b, x = inv(A)*b, C = A*B
• olbrzymia, wiarygodna biblioteka funkcji matematycznych:
algebra liniowa, całkowanie, różniczkowanie, optymalizacja, ...
• kompromis pomiędzy prostotą, dokładnością, szybkością
2)
Zaawansowana wizualizacja 2D/3D danych
, prosta w użyciu.
3)
Biblioteki specjalistyczne
(toolboxes)
pisane przez ekspertów
światowych
z zakresu elektroniki, telekomunikacji, automatyki, ...
4)
Simulink,
Stateflow, SimEvent, SimPower, Link to ModelSim
(VHDL,
FPGA, ASIC) - okienkowo-zorientowane środowiska graficzne do
uruchamiania algorytmów na podstawie ich schematów blokowych,
wyposażone w liczne biblioteki (blocksets).
5)
Otwarta architektura
:
• m-zbiory dostępne w kodzie źródłowym
• łatwość dołączania swoich funkcji
• mnogość interfejsów do różnych typów danych (wav, avi, DICOM,...)
6)
C-maker, Real-Time Workshop
, procesory DSP (TI Composer Studio)

Z języka C do Matlaba (1)
Zbiór dyskowy: prog1.m
%--------------------------------------------------------------------------------------------
% Program prog1: budżet rodziny
osoby = 3
;
% liczba osób
kasa = 1500.45
;
% łączny przychód
moje = kasa/osoby
,
pause
% moje kieszonkowe
disp
(
'moje kieszonkowe = '
), disp(moje), pause
% display
%--------------------------------------------------------------------------------------------
Uwagi:
1) Brak jest specjalnych słów początku i końca programu.
Program jest zbiorem linii zapisanych w osobnym zbiorze na dysku
o rozszerzeniu
*.m
2) Brak deklaracji zmiennych. Wszystkie są typu
double
.
3)
%
stanowi znak początku komentarza (za nim do końca linii).
4) Znak
;
informuje, żeby nie wyświetlać wyniku operacji.
5) Znak
...
na końcu linii informuje, że następna linia jest kontynuacją
bieżącej.
6) Instrukcja
disp()
służy do wyświetlania tekstu lub wartości
zmiennej.
Zbiór dyskowy: prog2.m
%--------------------------------------------------------------------------------------------
% Program prog2: budżet rodziny
osoby = 3;
% liczba osób
kasa =
input
(
'ile do podziału ? '
); % komunikat, czytaj z klawiatury
moje = kasa/osoby, pause
% oblicz, pokaż wynik gdyż brak ;
%--------------------------------------------------------------------------------------------
Uwagi:
1) W instrukcji
input
po wyświetleniu na ekranie tekstu
„ile do
podziału?”
jest wczytywana liczba z klawiatury, której wartość jest
podstawiana do zmiennej kasa.

Z języka C do Matlaba (2)
Zbiór dyskowy: prog3.m
%-----------------------------------------------------------------------------------------
osoby = 3;
kasa = input(
'ile do podziału ? '
);
moje =
wzor3
( kasa, osoby ), pause
% wywołanie funkcji wzor3()
%----------------------------------------------------------------------------------------
Zbiór dyskowy: wzor3.m
%----------------------------------------------------------------------------------------
function
kieszen =
wzor3
( forsa, osoby )
% Moja funkcja, licząca kieszonkowe
% Wejście: forsa - budzet rodzinny
% Wyjście: kieszen - moje kieszonkowe
kieszen = forsa/osoby;
% wyjście = funkcja wejścia
%----------------------------------------------------------------------------------------
Uwagi:
1) Każda funkcja jest osobnym plikiem na dysku.
Od programu różni się tym, że rozpoczyna ją słowo
function
.
2) Przykładowa budowa:
function
[ x, y, z ] =
zróbcoś
(
a, b, c)
% komentarz co funkcja robi, wyświetlany podczas
help
zróbcoś
x = a + b;
% wyraź parametry wyjściowe {x, y, z}
y = a - b;
% poprzez parametry wejściowe {a, b, c}
z = c;
% czyli {x, y, z } = funkcja( a, b, c)

Z języka C do Matlaba (3)
Zbiór dyskowy: prog4.m
%-----------------------------------------------------------------------------------------
clear all
;
% wyzeruj wszystkie zmienne
global
osoby
;
% deklaracja zmiennej globalnej,
% dostępnej także w funkcjach
osoby = 3;
% ustaw liczbę osób
kasa = input(
' ile do podziału ? '
);
% wczytaj wartość budżetu
moje =
wzor4
( kasa ), pause
% oblicz moje kieszonkowe
%-----------------------------------------------------------------------------------------
Zbiór dyskowy: wzor4.m
%-----------------------------------------------------------------------------------------
function
kieszen =
wzor4
( forsa )
global
osoby
kieszen = forsa/osoby;
%-----------------------------------------------------------------------------------------
Uwagi:
1) Aby wartość zmiennej była dostępna w także w funkcji, zmienna ta
musi być zadeklarowana jako
global
(w programie i w funkcji)

Z języka C do Matlaba (4)
Zbiór dyskowy: prog5.m
%-------------------------------------------------------------------------------------------
clear all
;
% wyzeruj wszystkie zmienne
global
osoby;
% deklaracja zmiennej globalnej
osoby = 3;
% ustaw liczbę osób
kasa = input(
'ile do podziału ? '
);
% wczytaj wartość budżetu
[tata, mama, ja] =
wzor5
( kasa ), pause
% kilka zwracanych wartości
%-------------------------------------------------------------------------------------------
Zbiór dyskowy: wzor5.m
%-------------------------------------------------------------------------------------------
function
[osoba1, osoba2, osoba3] =
wzor5
( forsa )
% Moja funkcja, licząca kieszonkowe
% Wejście: forsa - budżet rodzinny
% Wyjście: osoba1, osoba2, osoba3 - kieszonkowe trzech osób
global
osoby
srednia = forsa/osoby;
osoba1 = 1.25 * srednia;
osoba2 = 1.00 * srednia;
osoba3 = 0.75 * srednia;
%--------------------------------------------------------------------------------------
Uwagi:
1) W tym przypadku obliczamy w funkcji kieszonkowe dla wszystkich
członków rodziny, które zwracamy do programu głównego.

Z języka C do Matlaba (5)
Zbiór dyskowy: prog6.m
%-------------------------------------------------------------------------------------------
clear all
;
% wyzeruj wszystkie zmienne
global
osoby;
% zadeklaruj zmienną globalną osoby
imiona = [
'tata'
;
'mama'
;
'ja '
];
% imiona członków rodziny
osoby = 3;
% liczb osób
kasa = input(
'ile do podziału ? '
);
% wczytaj budżet, wstaw do kasy
rodzina =
wzor6
( kasa ), pause
% funkcja teraz zwraca tablicę
disp(
'tata = '
); disp( rodzina(1) );
% kieszonkowe taty
disp(
'mama = '
); disp( rodzina(2) );
% kieszonkowe mamy
disp(
'ja = '
); disp( rodzina(3) ); pause
% kieszonkowe moje
for
i = 1 : osoby
% pętla
for-end
: wyświetlanie
% if( i == 2) break; end
%
break
to wyjście z pętli for
disp( [
'osoba nr '
num2str(i)
',czyli '
imiona(i,:)
' = '
num2str(rodzina(i))
] );
end
if
( rodzina(2) > rodzina(3) )
% warunek logiczny
if-else-end
disp(
'Mama ma więcej niż ja!'
);
else
disp(
'Mam co najmniej tyle co mama'
);
end
while
( rodzina(1) > rodzina(2) )
% pętla
while-end
;
break
ją kończy
disp(
'Tata ma więcej od mamy'
);
break
;
end
plot( 1:osoby, rodzina,
'b*--'
);
% rysunek (x, y)
xlabel(
'nr czlonka rodziny'
);
% opis osi x
ylabel(
'kieszonkowe [PLN]'
);
% opis osi y
title(
'BUDŻET RODZINNY'
);
% tytuł
pause
% pauza
%-------------------------------------------------------------------------------------------

Z języka C do Matlaba (6)
Zbiór dyskowy: wzor6.m
%-------------------------------------------------------------------------------------------
function
czlonkowie
= wzor6( forsa )
% Moja funkcja, licząca kieszonkowe
% Wejście: forsa - budżet rodzinny
% Wyjście: czlonkowie[] - kieszonkowe członków rodziny
global
osoby
srednia = forsa/osoby;
czlonkowie( 1 )
= 1.25 * srednia;
czlonkowie( 2 )
= 1.00 * srednia;
czlonkowie( 3 )
= 0.75 * srednia;
%-------------------------------------------------------------------------------------------
Zbiór dyskowy: prog7.m
%-------------------------------------------------------------------------------------------
load
rodzina.dat
% wczytaj ze zbioru
rodzina.dat
dwie liczby
kasa =
rodzina(1);
% podstaw pierwszą z nich do zmiennej kasa
osoby =
rodzina(2);
% a drugą - do zmiennej osoby
moje = kasa/osoby, pause
% oblicz moje kieszonkowe
save
kieszonkowe.dat moje /ascii
% zapisz je do zbioru
%
kieszonkowe.dat
%-------------------------------------------------------------------------------------------
Zbiór dyskowy: rodzina.dat
%-------------------------------------------------------------------------------------------
1500.45 3
%-------------------------------------------------------------------------------------------
Zbiór dyskowy: rodzina.dat
%-------------------------------------------------------------------------------------------
5.0015000e+002
%-------------------------------------------------------------------------------------------

Macierze w Matlabie (1)
» Cw_0_demo <ENTER>
A = [ 1 2 3; 4 5 6; 7 8 0 ]
% definicja macierzy A 3 x3
% wydruk, gdyż brak na końcu
A = 1 2
3
% średnika
4
5
6
7 8 0
B = A'
% 1) transpozycja i sprzężenie zespolone
% elementów macierzy
B = 1
4
7
% 2) dla macierzy o elementach rzeczywistych
2
5
8
% tylko sprzężenie
3
6
0
%
3) jeśli
.’
to tylko transpozycja
C = A + B
% suma dwóch macierzy
C = 2 6
10
%
10
=
3
+
7
6 10 14
10 14 0
C = A * B
% mnożenie dwóch macierzy
C =
14
32 23
%
14
= 1*1 + 2*2 + 3*3
32
77 68
%
32
= 4*1 + 5*2 + 6*3
23
68 113
%
23
=
7*1 + 8*2 + 0*3
inv(A)
% macierz odwrotna
ans = -1.7778 0.8889 -0.1111
1.5556 -0.7778 0.2222
-0.1111 0.2222 -0.1111
det(A)
% wyznacznik macierzy
ans = 27
rank(A)
% rząd macierzy
ans = 3
cond(A)
% uwarunkowanie macierzy
ans = 35.1059
% (max sv) / (min sv )
Macierze w Matlabie (2)
eig(A)
%
wartości własne
ans = -0.3884
12.1229
-5.7345
[v,d] = eig(A)
% wektory i wartości własne
v = 0.7471 -0.2998 -0.2763
-0.6582 -0.7075 -0.3884
0.0931 -0.6400 0.8791
d = -0.3884 0 0
0 12.1229 0
0 0 -5.7345
svd(A)
% wartości osobliwe
ans = 13.2015
5.4388
0.3760
expm(A)
% eksponenta macierzy
ans = 1.0e+004 *
3.1591 3.9741 2.7487
7.4540 9.3775 6.4858
6.7431 8.4830 5.8672
p = poly(A)
% wielomian charakterystyczny
p = 1.0000 -6.0000 -72.0000 -27.0000
roots(p)
% pierwiastki tego wielomianu
ans = 12.1229
% czyli wartości własne macierzy A
-5.7345
-0.3884

Wektory w Matlabie
x = [ 1 2 3 ]
% definicja wektora poziomego
x =
1
2
3
%
y = [ 4; 5; 6 ]
% definicja wektora pionowego
y =
4
%
5
%
6
%
x * y
% iloczyn skalarny
ans = 32
% 1*
4
+ 2*
5
+ 3*
6
y * x
% iloczyn wektorowy
ans = 4 8 12
%
4
* [ 1 2 3 ]
5 10 15
%
5
* [ 1 2 3 ]
6 12 18
%
6
* [ 1 2 3 ]
x .* y'
% iloczyn odpowiadających sobie
ans = 4 10 18
% elementów: [ 1*
4
, 2*
5
, 3*
6
]
x + y'
% suma odpowiadających sobie
ans = 5 7 9
% elementów: [ 1+
4
, 2+
5
, 3+
6
]
Laboratorium w Matlabie (1)
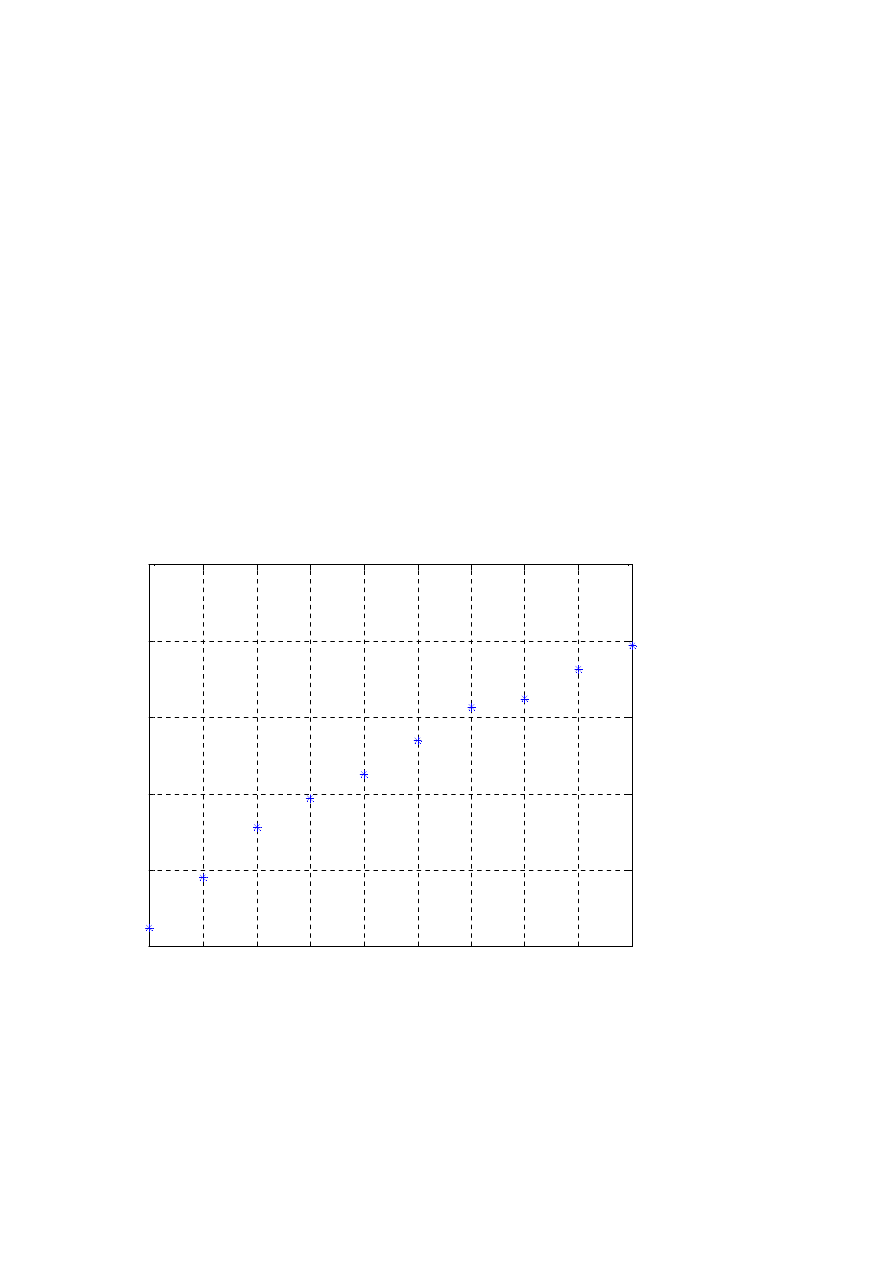
% W wyniku pomiaru otrzymano następujące liczby :
% ( x = numer pomiaru, y = wartość )
x = [ 1 2 3 4
5 6 7 8 9 10 ];
y = [ 0.912 0.945 0.978 0.997 1.013 1.035 1.057 1.062 1.082 1.097 ];
% W celu lepszej obserwacji przedstawiamy je na rysunku :
plot( x, y, ‘b*’ ) ;
% wykres y = funkcja(x), niebieskie „*”
title( 'DANE POMIAROWE' );
% tytuł
xlabel( 'numer probki' );
% podpis pod osią x
xlabel( 'wartosc' );
% podpis pod osią y
grid;
% siatka
1
2
3
4
5
6
7
8
9
10
0.9
0.95
1
1.05
1.1
1.15
DANE POMIAROWE
numer probki
wa
rt
os
c
pause
% naciśnij jakiś klawisz
clf
% wyzeruj rysunek
Laboratorium w Matlabie (2)
% Interesuje nas wartość średnia tych liczb
% oraz ich rozrzut wokół wyliczonej wartości średniej :
srednia = mean( y )
% srednia = sum( y ) / length( y )
%
srednia =
% ponieważ brak średnika
% powyżej,
1.0178
% jest wyświetlany wynik
rozrzut = std( y )
% rozrzut = ...
% ... sqrt( sum(
( y - srednia ).^2
) / length( N ) )
rozrzut =
% ponieważ brak jest średnika
% powyżej,
0.0603
% to jest wyświetlany wynik
% Dodatkowo chcielibyśmy wyznaczyć współczynniki a i b linii prostej
% y = a * x + b
% najlepiej aproksymującej otrzymane dane (prosta regresji liniowej).
xm = mean( x );
% średnia wartość wektora x
ym = mean( y );
% średnia wartość wektora y
xr = x - xm;
% wektor x - średnia x (od każdego elementu)
yr = y - ym;
% wektor y - średnia y (od każdego elementu)
a = (xr * yr') / (xr * xr')
% obliczenie wsp a prostej, to samo
% inaczej: a = sum( xr .* yr ) / sum( xr .* xr )
%
(
) (
)
(
) (
)
1
1
1
( )
*
( )
( )
,
( )
* ( )
N
N
n
n
N
n
x n
x
y n
y
x n
a
x
N
x n
x
x n
x
=
=
=
−
−
=
=
−
−
∑
∑
∑
a =
0.0197
b = ym - a * xm
% obliczenie wsp b prostej
b =
0.9096
Laboratorium w Matlabie (3)
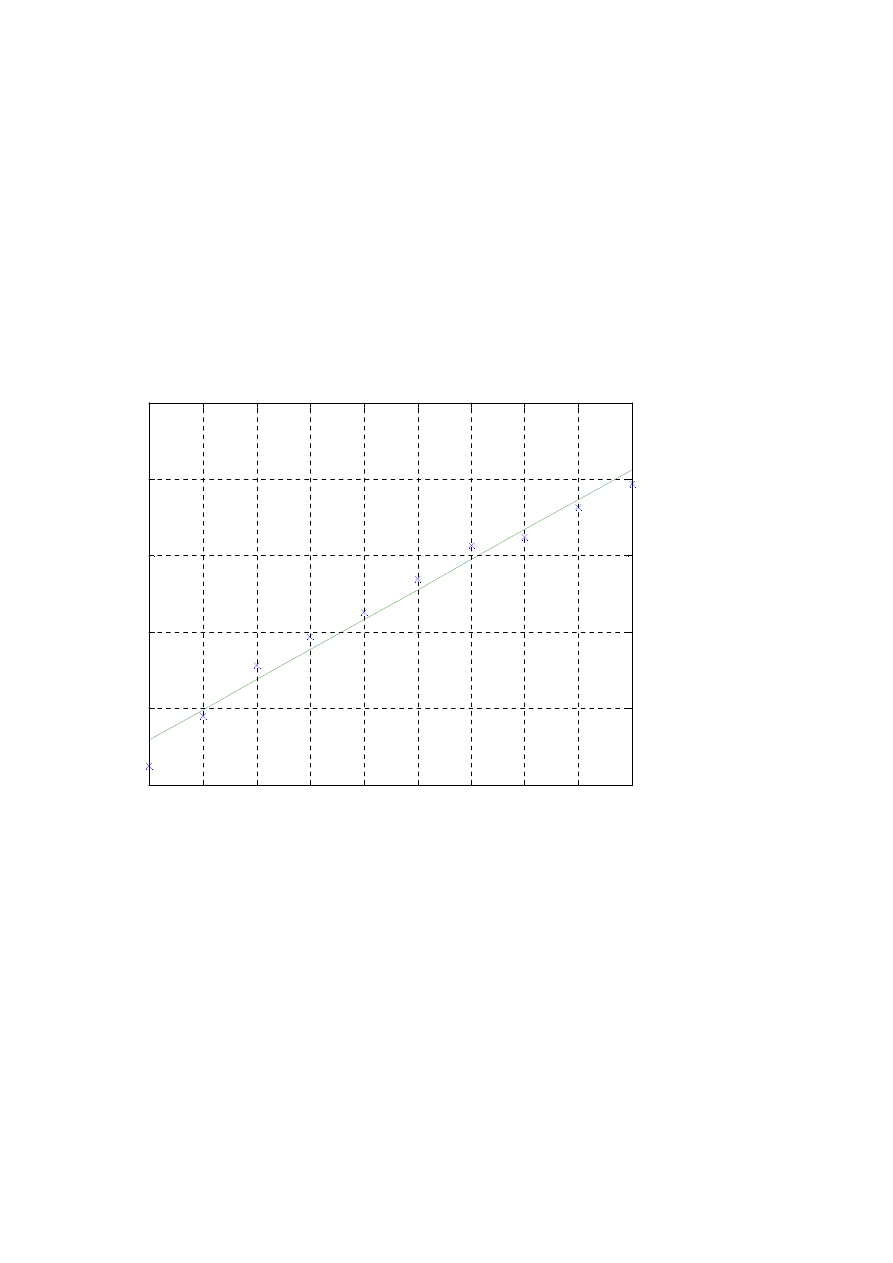
% Teraz porównamy punkty eksperymentalne z linią regresji liniowej
plot( x, y, 'bx', x, a*x+b, 'k-' )
% niebieskie krzyżyki, linia czarna
title( 'DANE POMIAROWE' )
% tytuł
xlabel( 'numer próbki' )
% podpis pod osią x
ylabel( 'wartość' )
% podpis pod osią y
grid
% siatka
1
2
3
4
5
6
7
8
9
10
0.9
0.95
1
1.05
1.1
1.15
DANE POMIAROWE I PROSTA REGRESJI LINIOWEJ
numer probki
wa
rt
os
c
pause
% naciśnij cokolwiek
clf
% wyzeruj rysunek
echo off
% nie wyświetlaj komend na monitorze

MATLAB - skrót
1)
„
↑↓”
- przewijanie ostatnich linii w linii komend
„>> ....”
2)
„%”
- znak komentarza, za nim do końca linii
3)
„...”
- znak kontynuacji w następnej linii
4)
brak „;”
na końcu instrukcji oznacza polecenia wyświetlenia wyniku operacji
5)
help
instrukcja
- funkcja pomocy
help
: jak się używa
instrukcji
?
6)
„!”
- znak wywołania programu zewnętrznego wewnątrz Matlaba
!edit prog.m
- uruchomienie zewnętrznego edytora i wczytanie prog.m
7)
zerowanie:
clear all
- zawartości wszystki zmiennych (np. na początku prog)
clc
- okna komend
clf
- okien graficznych z rysunkami
8)
format
-
dokładność wydruku wyniku obliczeń
format short
1.3333
short e
1.3333*E+000
long
1.33333333333338
long e
1.33333333333338 * E+000
9)
Stałe predefiniowane
-
pi
= 3.14159...,
eps
= 2.22*10^(-16) (dokładność)
i, j
= sqrt(-1)
10)
Inicjalizacja
:
liczby rzczywiste:
n = 1; m = 10; a = 1.2345; b = 1.2*10^(-6);
liczby zespolone:
z = 3 + 4*
i
; z = 3 + 4*
j
; (dla macierzy: Z = A + B*
i
lub Z = A + B*
i
)
wektory poziome:
x
= [ 1.2 3.4 5.6 ];
y = 0. : 0.1 : 0.4;
otrzymujemy:
od krok do
0., 0.1, 0.2, 0.3, 0.4
z = rand(1, 5);
wektor 1x5 wartości losowych
z = sin( 0 : pi/2 : 2*pi );
0, 1, 0, -1, 0
z = sin(
x
);
wektor 1x3 wartości sin dla
x
z = x(1 : 2);
% podwektor, pobranie wybranych elementów od-do
otrzymujemy: [ 1.2 3.4 ]
wektory pionowe:
y = [ 1.2; 3.4; 5.6 ];
otrzymujemy:
y = [ 1.2
↑ ↑
3.4
znak nowego wiersza
5.6 ]
macierze:
A = [ 1 2 3; 4 5 6; 7 8 9 ];
otrzymujemy:
A = [ 1 2 3
4 5 6
7 8 9 ]

B = rand(5,5);
% macierz liczb losowych o wymiarach 5 x 5
C = eye(10);
% macierz diagonalna o wymiarach 10 x 10
D = A(1 : 2, 2 : 3);
% podmacierz A,
otrzymujemy [ 2 3; 5 6]
B = A’;
% transpozycja, sprzężenie elementów
11)
whos
- lista zmiennych w pamięci, ich wymiary
12)
Operatory arytmetyczne są domyślnie wektorowo-macierzowe.
Jeśli chcemy działać na elementach wektorów/macierzy, to operator
poprzedzamy kropką, np. „ .* „
+, -, *, \ (lewe dzielenie), / (prawe), ^(potęga),
liczby:
c = a
op
b,
gdzie
op
= +, -, *, /, ^
wektory:
z = x
op
y,
gdzie
op
= +, -, *, /,
.*
,
./
macierze:
C = A
op
B,
gdzie
op
= +, -, *, /, \,
.*
,
./
X = B/A
takie, że
X*A=B
X = A/B
takie, że
A*X=B y = A*x;
np. x = [ 1 2 3 ];
y = [ 4 5 6 ];
x + y = [ 5 7 9 ]
y - x = [ 3 3 3 ]
x * y’ = 1*4 + 2*5 + 3*6 = 32
x’ * y = [ 4 5 6
8 10 12
12 15 18 ]
x
.*
y = [ 4 10 18 ]
x
.\
y = [ 4 2.5 2 ]
x
.^
y = [ 1 32 739 ]
x
./
y = [ 0.25 0.4 0.5 ]
x
.^2
= [ 1 4 9 ]
x
/
y = 0.4156
13)
Operatory logiczne
:
<, <=, >, >=, ==, ~=, & (AND), | (OR, ~ (NOT)
np.
if
( (a > b) & ( c ~= d) )
i = 0;
x=y;
while
( i <= 10 )
end
i = i+1;
end
14)
Zapisywanie zmiennych
na dysk i ich odczytywanie (
save, load
):
save temp X Y Z;
% X, Y, Z
→ temp.mat (zbiór binarny Matlaba)
load temp
% inicjalizacja X, Y, Z
xy = [x’ y’];
% złóż wektory w macierz dwu-kolumnową
save temp.dat xy /ascii
% zapisz zmienną xy do zbioru ascii temp.dat
load temp.dat
% wczytaj dane ze zbioru temp.dat
x = temp(:,1);
% x = pierwsza kolumna macierzy temp
y = temp(:,2);
% y = druga kolumna macierzy temp

15)
Przykłady funkcji matematycznych
(użyj
help
funkcja, aby szczegóły):
• sqrt(), log2(), log10(), log()=ln(), exp(), sin(), cos(), tan(), atan(), atan2() -
jeśli na macierzach, to na ich elementach
• mean(), std(), min(), max(), median(), sort(), prod(), cumsum(),
cumprod() -
jeśli na macierzach, to w kolumnach
• expm(A), logm(A), sqrtm(A) -
na całych macierzach
• poly(A), det(A), trace(A), kron(A), eig(A), svd(A)
• diff(), hist(), corrcoef(), cov(), cplxpair()
• abs(), angle(), conv(), deconv(), xcorr(), fft(), ifft(), fftshift(), spectrum(),
psd(), filter()
16)
Przykłady funkcji graficznych
(użyj
help
funkcja, aby szczegóły):
•
2D
: plot(x,y), loglog(x,y), semilog(x,y), polar(x,y), stem(x,y), bar(x,y),
stairs(x,y)
kolory: r, g, b, k, w, i (red, green, blue, black, white, invisible)
linie: - / -- / -. / : (ciągła, przerywana, kreska-kropka, kropkowana)
symbole: +, *, x, o
np. plot(x1, y1, ‘ro’, x2, y2, ‘b--’, x3, y3, ‘k:’
•
3D
: mesh(A), meshc(A), meshz(A), contour(A), surf(A), surfl(A),
waterfall(A), image(A), imagesc(A)
•
ogólne
: title(), xlabel(), ylabel(), text(), axis(),subplot(), hold, grid;
17)
Instrukcje sterujące
(pozostałe to:
pause, break, error, return
):
for-end
for
m = 1 : M
for
n = 1 : N
A(m, n) = 1 / (m+n-1);
end
end
while-end
n=1;
while
( prod(n) < 1*E+100) n=n+1;
end
if-elseif-else-end
if( x==1 )
a=b;
elseif( y<5 )
c=d;
else
e=f;
end
18)
Funkcje
program.m
----------------------------------------------
a1 = 10; a2 = 20; a3 = 30;
[ b1, b2, b3 ] = funkcja( a1, a2, a3);
----------------------------------------------
funkcja.m
----------------------------------------------
function
[x, y, z] = funkcja( a, b, c)
% co robi ta funkcja ?
x = a + b; y = b - c; z = b * c;

DODATKOWE PRZYKŁADY
W JĘZYKU
MATLAB

% PRZYKLAD 1
% Inicjalizacja danych, zapis i odczyt z dysku, rysunek
% Zapisywanie danych na dysk i ich odczytywanie z dysku
x = [ 1 2 3 4 5 ];
% pierwszy wektor
y = [ 0.1 0.2 0.3 0.2 0.1 ];
% drugi wektor
x = x'; y = y';
% odwrócenie obu wektorów do pionu
plot(x, y, '
b
' )
% rysunek y=f(x), niebieska linia
title('y=f(x)')
% tytuł
pause
% czekaj
xy = [ x y ];
% złożenie dwóch kolumn w macierz xy
pause
% czekaj
save wy.dat xy /ascii
% zapis xy na dysk do zbioru wy.dat
load wy.dat
% przeczytaj zbiór z dysku
x1 = wy(:,1);
% podstaw pierwsza kolumnę do x1
y1 = wy(:,2);
% podstaw druga kolumnę do y1
plot( x, y, '
b
', x1, y1, '
r
')
% rysunek y=f(x) i y1=f(x1) - porównanie
title('y=f(x) oraz y1=f(x1)')
% tytuł
pause
% czekaj

% PRZYKLAD 2 - przyklady grafiki dwuwymiarowej
% pojedynczy rysunek - pojedyncza krzywa =================
subplot(111);
% jeden wiersz, jedna kolumna, jeden rysunek
x = 1 : 0.1 : 25 ;
% definicja zmiennej x: od 1 co 0.1 do 20
y = 500 + 400*sin(x);
% oblicz y dla każdego x
plot( x, y, 'k' )
% narysuj wykres y=f(x), linia czarna
title('SINUSOIDA')
% tytuł
xlabel('argument x')
% opis osi x
ylabel('wartość y')
% opis osi y
grid
% siatka
pause
% czekaj na naciśnięcie klawisza
% pojedynczy rysunek z kilkoma krzywymi ==================
plot( x, y, '
r-
', x, 2*y, '
b-
' )
% pierwsza RED, druga BLUE; obie ciągłe
title('DWIE SINUSOIDY')
% tytuł
pause
% 4 rysunki z pojedynczą krzywą
% leżące na szachownicy: dwa wiersze, dwie kolumny (22)
% numer rysunków:
1, 2, 3, 4
(kolejno, wierszami)
subplot(22
1
), plot(x,y,'
b--
')
% RYS - LEWY GÓRNY
title('skala linia, kreska-kreska')
% linia niebieska kreska-kreska
subplot(22
2
), plot(x,y,'
r-.
')
% RYS - PRAWY GÓRNY
title('skala linia, kreska-kropka')
% linia czerwona kreska-kropka
subplot(22
3
), loglog(x,y)
% RYS - LEWY DOLNY
title('skala log x/y')
% skala logarytmiczna x i y
subplot(22
4
), semilogx(x,y)
% RYS - PRAWY DOLNY
title('skala log x ')
% skala logarytmiczna osi x
pause
% czekaj
clf
% wyzeruj ekran graficzny

% PRZYKLAD 3 - prosta grafika trójwymiarowa
subplot(111);
% jeden wiersz, jedna kolumna, jeden rysunek
% definicja X i Y
[ X, Y ] = meshdom( -2 : 0.05 : 2, -2 : 0.05 : 2 );
% def Z = f( X, Y )
Z = sin( 5*(X.^2 +Y.^2) ) .* exp( -0.5*X.^2 -0.5*Y.^2 );
mesh( Z )
% jeden rysunek 3D
title('MAPA 3D')
%
pause
% czekaj
contour( Z )
% jeden rysunek POZIOMICE
title('POZIOMICE 3D')
%
pause
% czekaj
subplot(211); mesh( Z ); title('Rys A'); pause
% kilka RYS na raz
subplot(212); contour( Z ); title('Rys B'); pause
%
subplot(111),
meshc( Z ),
title(
'Funkcja MESHC'
),
pause
meshz( Z ),
title(
'Funkcja MESHZ'
),
pause
surf( Z ),
title(
'Funkcja SURF'
),
pause
surfl( Z ),
title(
'Funkcja SURFL'
),
pause
waterfall( Z ), title(
'Funkcja WATERFALL'
), pause
imagesc( Z ), colormap(
'gray'
), colorbar,
title(
'Funkcja IMAGE (GRAY)'
),
pause
imagesc( Z ), colormap(
'autumn'
), colorbar,
title(
'Funkcja IMAGE (AUTUMN)'
), pause

% Przykład 4 - rozwiązanie równania algebraicznego: A * x = b
A = [ 14 32 23; 32 77 68; 23 68 113 ]
% zdefiniuj macierz A
x = [ 1 2 3 ]
% zdefiniuj wektor x
b = A * x'
% OBLICZ „b” (x: wiersz --> kolumna)
pause
% czekaj
clc
% wyczyść ekran
% ODTWÓRZ „x” - na podstawie A i b
x = inv(A) * b
% za pomocą macierzy odwrotnej
x = A \ b
% oraz poprzez dzielenie macierzowe
pause
% czekaj

% PRZYKLAD 5 - rozkład sygnału na sumę sinusoid
clear all, clf;
% wyzeruj pamięć i ekran graficzny
% Podaj parametry sygnału ==============================
N = 256;
% długość sygnału
fs1 = 250;
% częstotliwość składowej 1 w Hz
fs2 = 500;
% częstotliwość składowej 2 w Hz
fp = 8000;
% częstotliwość próbkowania w Hz
dt = 1/fp;
% odległość między próbkami w sekundach
% Wygeneruj i narysuj analizowane sygnały =================
t = 0 : dt : (N-1)*dt;
% definicja zmiennej czasu t
y1 = 0.4*sin(2*pi*fs1*t + pi/2);
% oblicz składową 1, y1 dla każdego t
y2 = 0.2*sin(2*pi*fs2*t + pi/4);
% oblicz składową 2, y2 dla każdego t
y = y1 + y2;
% suma składowych
plot( t, y ,'
b
')
% narysuj wykres y=f(t)
title('SUMA DWOCH SINUSOID')
% tytuł
xlabel('czas')
% opis osi x
ylabel('sygnał')
% opis osi y
grid
% siatka
pause
% czekaj na „klawisz”
% Rozłóż sygnał na składowe sinusoidalne, transformata Fouriera
Y = fft( y, N );
% widmo sygnału, transformata Fouriera
% SKALOWANIE WYNIKU
Y = 2*abs( Y )/N;
% wartość bezwzględna liczby zespolonej
Y = Y( 1 : N/2 +1 );
% ważna tylko polowa, reszta symetryczna
df = 1/(N*dt);
% co ile herców prążek widma
f = 0 : df : N/2*df;
% częstotliwości prążków widma
% POKAŻ WYNIK
plot( f, Y );
% rysunek widma
title('Rozkład sygnału na sumę sinusoid')
% podpis
xlabel('częstotliwość w [Hz]')
% opis osi x
ylabel('amplituda')
% opis osi y
pause
% czekaj
% Zsyntezuj sygnał ze składowych sinusoidalnych
ys = real( ifft( Y ) ); ys=ys’;
% odwrotna transformacja Fouriera
plot( t, y, '
r
', t, ys, '
b
' );
% porównaj oryginał i kopię

% PRZYKLAD 6 - znajdowanie miejsca zerowego funkcji
%
!!! danej wzorem !!!
% Funkcja FZERO służy do znajdowania miejsca zerowego funkcji
%
% Załóżmy, że interesuje nas funkcja fun_zero(x), zdefiniowana
% w zbiorze fun_zero.m na dysku
x = 0 : .02 : 2;
% zmienność argumentu
y = fun_zero(x);
% zmienność funkcji
plot( x, y, '
b
' )
% rysunek
title( 'Funkcja y=f(x) - zauważ zero w pobliżu x = 1.2' ), grid
% tytuł
pause
% czekaj
% Aby znaleźć zero funkcji w otoczeniu x = 1.2, wołamy FZERO
xokolica = 1.2;
% x, w pobliżu którego szukamy zera
xtoler = eps;
% wymagana tolerancja rozwiązania
z = fzero( 'fun_zero', xokolica, xtoler);
% wyznaczmy argument zera
x = 0.8 : .01 : 1.6;
% x w otoczeniu zera
y = fun_zero(x);
% y w otoczeniu zera
plot( x, y, z, fun_zero(z), '
ro
')
% rysujemy funkcje i obliczone zero
title( 'Zero funkcji funczero(x)' )
% tytuł
grid, pause
% siatka, czekanie
z
% wypisz argument zera
fun_zero(z)
% wypisz wartość zera
% ######################################################
function y = fun_zero( x )
% funkcja, w której miejsc zerowych poszukujemy
y = 1 ./ ((x-.3).^2 + .01) + 1 ./ ((x-.9).^2 + .04) - 6;

% PRZYKLAD 7
% wyznaczanie parametrów znanej funkcji
% jak najlepsze dopasowanie do danych doświadczalnych
global dane
% zmienna globalna - widziana z innych *.m zbiorów
dane = ...
% pary punktów (x,y) otrzymanych doświadczalnie
[ -5 25.5
% np. podczas laboratorium z fizyki
-4 15.2
% pierwsza kolumna to argument x
-3 8.5
% zaś druga, to wartość y
-2 4.3
% jest to zaszumiona funkcja postaci y = a*x^2 + b
-1 0.8
0 0.0
1 0.9
2 4.1
3 8.7
4 15.7
5 24.9 ];
x = dane(:,1);
% „pobranie” wektora argumentów x
y = dane(:,2);
% „pobranie” wektora wartości funkcji y
plot(x,y,'
ro
')
% wykres y w funkcji x, czerwone "o"
% Załóżmy, że zjawisko opisuje zależność: y = f(x;a,b) = a*x^2 + b
% DWIE PARY PUNKTÓW (x1,y1) (x2,y2) wystarczą, aby obliczyć a,b
% Ale ponieważ dane eksperymentalne są ZASZUMIONE,
% przeprowadza się więcej pomiarów.
% Następnie stara się znaleźć takie wartości a i b, aby błąd:
%
błąd = SQRT ( S U M A [ y - f(x; a,b) ]^2 / M )
%
m=1...M
% był jak najmniejszy, tzn. aby funkcja była "jak najlepiej" dopasowana
params = [1 0]';
% startowe wartości a i b
toler = 0.05;
% wymagany błąd
blad = fmins('fun_fi', params, toler);
% procedura minimalizacyjna
a = blad( 1 )
% wynikowe a
b = blad( 2 )
% wynikowe b
fy = a * x.^2 + b;
% oblicz wartości funkcji f(x)
% dla obliczonych a i b
blad = std( fy-y )
% oblicz końcowy błąd

function blad = fun_fi( params )
global dane
% Funkcja wykorzystywana przez przykład cw_7.m
% Ma ona nastepujaca postac : y = a*x^2 + b
% Wejście : parametry a i b
% Wyjście : błąd dopasowania funkcji do danych eksperymentalnych
a = params(1); b = params(2);
% szukane parametry
x = dane(:,1); y = dane(:,2);
% dane z programu głównego
fy = a * x.^2 + b;
% oblicz wartości funkcji f(x)
% dla aktualnych parametrów a i b
blad = std( fy-y );
% błąd dopasowania
% Pokaż postęp w dopasowaniu parametrów funkcji do danych
plot( x, fy, 'w', x, y, 'wo'), grid
xt = 0;
yt = 3/4*max(y);
text( xt, 1.2*yt, ['a = ' num2str( a ) ] )
text( xt, 1.1*yt, ['b = ' num2str( b ) ] )
text( xt, 1.0*yt, ['blad = ' num2str( blad ) ] )
pause

% PRZYKLAD 8 - dopasowanie funkcji do danych
%
jak w przykładzie 7 tylko trudniej
global dane
% zmienna globalna - widziana z innych *.m zbiorów
dane = ...
% pary punktów (x,y), otrzymane z dośw.
[ 0.0000 5.8955
% np. podczas laboratorium z fizyki
0.1000 3.5639
% pierwsza kolumna argument x, np. czas
0.2000 2.5173
% druga kolumna wartość y, np. napięcie
...
1.0000 0.6856
...
2.0000 0.2636 ];
x = dane(:,1);
% „pobranie” wektora argumentów x
y = dane(:,2);
% „pobranie” wektora wartości funkcji y
plot( x, y, '
ro
' )
% wykres y w funkcji x, czerwone "o"
pause
% pauza
% Z teorii wynika, ze dane zjawisko opisuje teoretyczna zależność:
% y = f( x ) = c(1) * exp(-lambda(1)*x) + c(2) * exp(-lambda(2)*x)
% Powyższa funkcja ma dwa parametry liniowe: c(1) i c(2)
% oraz dwa parametry nieliniowe: lambda(1) i lambda(2)
%
% Chcemy wyznaczyć takie wartości tych parametrów, aby funkcja
% y=f(x) była najlepiej dopasowana do danych pomiarowych (x,y)
lambda = [1 0]';
% startowe wartości lambda(1) i (2)
toler = 0.1;
% wymagany tolerancja błędu
blad = fmins('fun_fit', lambda, toler);
% procedura minimalizacyjna
lambda = blad
% wynikowe lambda(1) i (2)
A = zeros( length(x), length(lambda) );
% obliczenia jak w fun_fit.m
for j = 1 : size(lambda)
% dla każdego x i lambda
A(:,j) = exp( -lambda(j) * x );
%
end
%
c = A \ y
%
fy = A * c;
%
blad = std(fy-y)
%

function blad = fun_fit(lambda)
global dane
% Funkcja wykorzystywana przez cw_8.m
% Ma ona następującą postać :
%
% y = c(1)*exp(-lambda(1)*x) + ... + c(n)*exp(-lambda(n)*x)
%
% oraz posiada n parametrów liniowych c(i) i nieliniowych lambda(i)
%
% Wejście : zestaw parametrów lambda
% Wyjście : błąd aproksymacji danych eksperymentalnych przez
%
aktualny zestaw parametrów lambda
%
% Parametry c(i) są wyznaczane na podstawie lambda i danych dośw.
x = dane(:,1); y = dane(:,2);
% podstaw dane
% w programie głównym
A = zeros( length(x), length(lambda) );
% utwórz macierz A, wyzeruj ją
% wierszy tyle ile danych,
% kolumn tyle ile lambda
for j = 1:size(lambda)
% dla każdego x i lambda
A(:,j) = exp( -lambda(j) *x );
% oblicz wartości macierzy A,
end
% takiej że y = A * c
c = A \ y;
% oblicz wektor optymalnych parametrów c
% minimalizujących błąd średniokwadratowy
fy = A * c;
% oblicz wartości funkcji fy dla tego c
blad = std(fy-y);
% oblicz błąd dopasowania
% jak wartości funkcji różnią się od danych dośw.
% Pokaż postęp w dopasowaniu parametrów funkcji do danych
plot( x, fy, 'w', x, y, 'wo' ), grid
xt = max(x)/2; yt = max(y)/2;
text(xt,1.0*yt,['blad = ' num2str( blad )])
pause

% PRZYKLAD 10 - rozw. numeryczne równania różniczkowego
% Funkcje ODE23, ODE45 służą do numerycznego rozwiązywania zwyczajnych
% równań różniczkowych. Metoda rozwiązania Rungego-Kutty-Fehlberga,
% w której krok całkowania numerycznego jest zmieniany automatycznie
% ODE23 wykorzystuje zależności 2 i 3 rzędu - średnia dokładność,
% ODE45 wykorzystuje zależności 4 i 5 rzędu - duża dokładność.
% Załóżmy, że interesuje nas rozwiązanie równania różniczkowego
% van der Pola drugiego rzędu postaci :
%
y'' + (y^2 - 1)*y' + y = 0
% gdzie ' oznacza operator różniczkowania.
% Po przedstawieniu w postaci:
%
y'' = -(y^2 - 1)*y' - y
% równanie to można zastąpić układem dwóch równań rzędu pierwszego
%
y1' = -(y2^2 - 1)*y1 - y2
%
y2' = y1
% gdzie y1 i y2 nazywane są tzw. zmiennymi stanu
%
% Aby zasymulować układ dynamiczny opisany równaniem różniczkowym,
% tworzy się *.m funkcję, która:
% otrzymuje wartości czasu i zmiennych stanu,
% zaś zwraca pochodne wartości zmiennych stanu.
%
% Załóżmy, że nasza funkcja nazywa się fun_diff.m
%
% Aby zasymulować równanie różniczkowe Van Der Pola w przedziale
% czasu 0 < t < 20, wywołujemy funkcję MATLABA ODE23:
t0 = 0;
% czas początkowy obserwacji
tfinal = 20;
% czas końcowy obserwacji
y0 = [ 0 0.25 ]';
% wartości początkowe zmiennych
stanu
tol = 1.e-3;
% dokładność rozwiązania
trace = 1;
% śledzenie
[t,y] = ode23( 'fun_diff', t0, tfinal, y0, tol, trace );
% [t,y] = ode45( 'fun_diff', t0, tfinal, y0, tol, trace );
plot(t,y), title('historia czasowa równania van der Pola'), grid, pause
% funkcja pomocnicza #####################################
function yprime = fun_diff(t,y);
% zwraca pochodne zmiennych stanu y1 i y2 równania Van der Pola
yprime = [ ( (y(2).^2 - 1).*y(1) - y(2) ); y(1) ];
Wyszukiwarka
Podobne podstrony:
Podstawy programowania w Matlabie skrypt
Nowa podstawa programowa WF (1)
Matlab środowisko programu
1 Podstawy programowania dialogowego
nowa podstawa programowa sp
11-nkb~1, wisisz, wydzial informatyki, studia zaoczne inzynierskie, podstawy programowania, l2
2-eukl~1, wisisz, wydzial informatyki, studia zaoczne inzynierskie, podstawy programowania, l2
Zmiany w podstawie programowej w zakresie edukcji matematycznej, Wczesna edukacja, Materiały do prac
1-algo~1, wisisz, wydzial informatyki, studia zaoczne inzynierskie, podstawy programowania, l2
c-zadania-w3, wisisz, wydzial informatyki, studia zaoczne inzynierskie, podstawy programowania, kol
Wychowanie w nowej podstawie programowej katechezy, szkoła, Rady Pedagogiczne, wychowanie, profilakt
PP temat6, Podstawy programowania
PODSTAWA PROGRAMOWA WYCHOWANIA PRZEDSZKOLNEGO
Laboratorium Podstaw Programowania 2
Podstawa programowa dla gimnazjum
Pytania na egzamin nowa podstawa programowa, sem I
więcej podobnych podstron