1
9. Układy regulacji położenia złącz manipulatora
Zadanie 1
Zachowując warunki zadania 2 z poprzedniego rozdziału wyznacz część modelową i
sprzężeniową prawa sterowania położeniem PD oraz PID dla serwomechanizmów członów
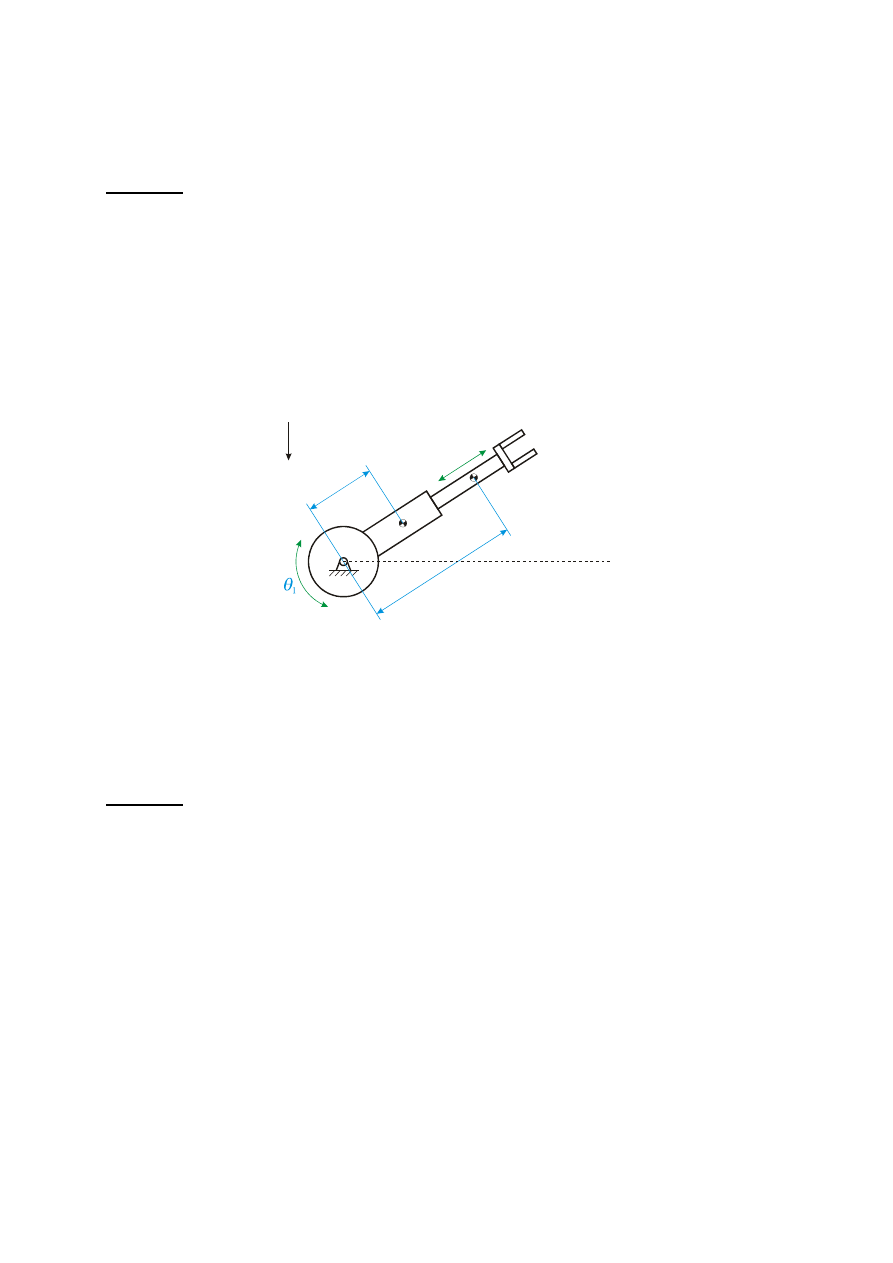
manipulatora OP (rys. 1). Napędy manipulatora są bezpośrednie. Przyjmij, że
I
zz1
= 0,38 kg·m
2
, I
zz2
= 0,1 kg·m
2
, m
1
= 3 kg, m
2
= 1,5 kg, l
1
= 0,2 m oraz przyśpieszenie
ziemskie g = 9,81 m/s
2
.
E
p
= 0
l
1
d
2
m
1
m
2
g
Rys. 1. Manipulator typu OP
Zadanie 2
Wyznacz część modelową i sprzężeniową prawa sterowania położeniem PD oraz PID dla
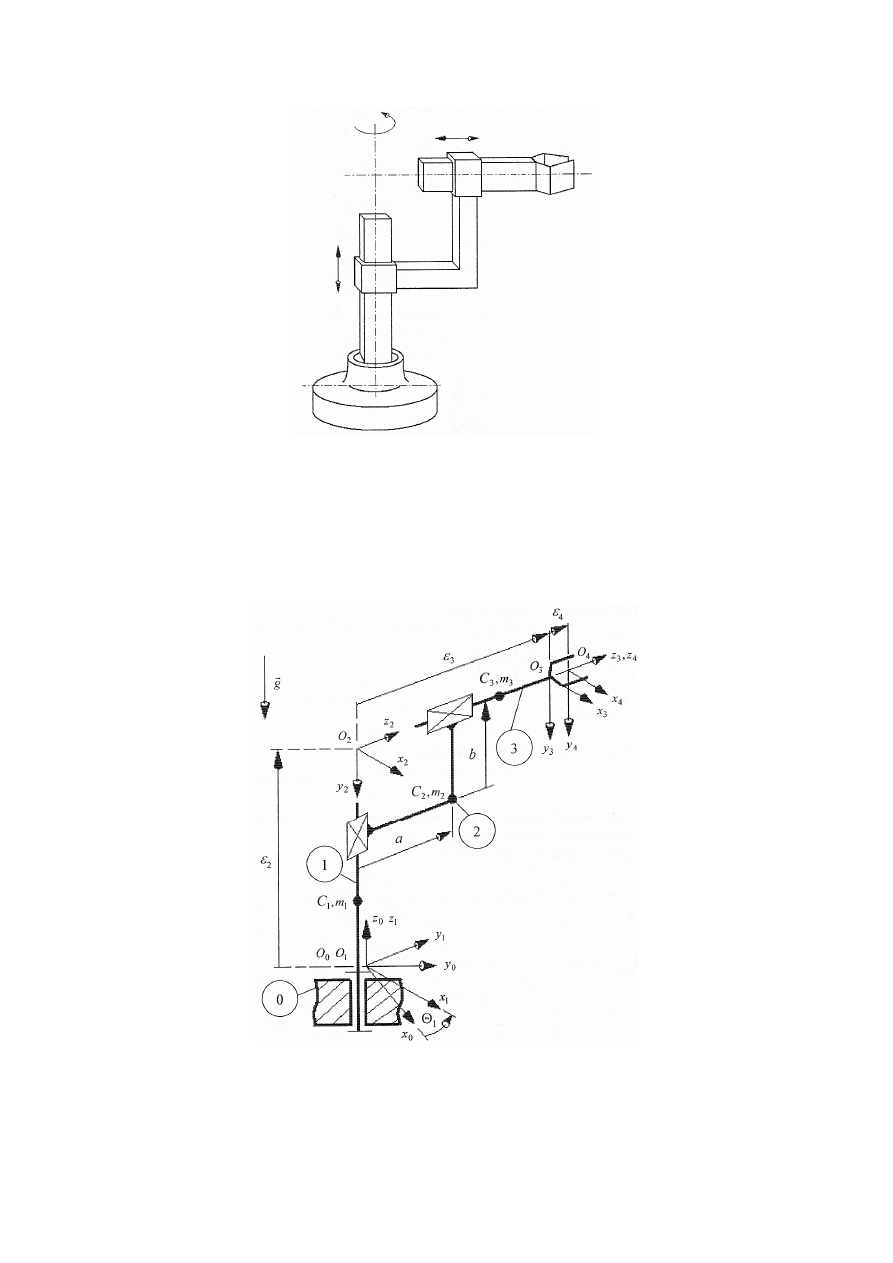
serwomechanizmów członów manipulatora OPP (rys. 2 i 3). Przyjmij, że masy członu
pierwszego i trzeciego są skupione w ich środkach geometrycznych. Masę członu drugiego
skupić w punkcie połączenia dwóch elementów prostopadłych o długościach a i b (rys. 3).
Pominąć tarcie. Bezmasowy chwytak jest pusty i nie ma kontaktu z otoczeniem. Napędy
manipulatora są bezpośrednie. Przyjmij, że a = b = 0,2 m,
ε
2max
= 0,8 m,
ε
3max
= 0,4 m,
ε
4
=
0,05 m, m
1
= 1 kg, m
2
= 0,5 kg, m
3
= 0,2 kg, g = 9,81 m/s
2
.
2
Rys. 2. Postać konstrukcyjna manipulatora OPP
Rys. 3. Schemat kinematyczny manipulatora OPP ze skupionymi masami członów

3
Literatura:
[1] Buratowski T.: Podstawy robotyki, AGH Uczelniane Wydawnictwa Naukowo-
Dydaktyczne, 2006
[2] Craig J. J.: Wprowadzenie do robotyki. Mechanika i sterowanie, Wydawnictwa
Naukowo-Techniczne, 1995
[3] Jezierski E.: Dynamika robotów, Wydawnictwa Naukowo-Techniczne, 2006
[4] Szkodny T.: Zbiór zadań z podstaw robotyki, Wydawnictwo Politechniki Śląskiej,
2010
Informacja o prawach autorskich
O ile nie zaznaczono inaczej, rysunki i teksty pochodzą z pozycji podanych w literaturze.
Niniejsze opracowanie stanowi pomoc do laboratorium z Podstaw Robotyki.
Wyszukiwarka
Podobne podstrony:
4 Dyskretne uklady regulacji, Nieznany (2)
6 Regulatory położenia w układach sterujących obrabiarek CNC
5 Dyskretne uklady regulacji, Nieznany (2)
ciagle uklady regulacji, Akademia Morska -materiały mechaniczne, szkoła, Mega Szkoła, szkola, AUTOMA
Ciągłe układy regulacji
Zadania 6, układy regulacji i dynamika AiS 2013
UKŁADY REGULACJI, układ regulacji PID
Ciągłe układy regulacji
2 Dyskretne uklady regulacji, Nieznany
Układy regulacji w?ntrali klimatyzacyjnej
układy regulacji podstawy(1)
W7 Regulacja polozenia
3 Dyskretne uklady regulacji, Nieznany (2)
Sprawozdania - Seria 1, Sprawozdanie 3 - Układy regulacji i pomiar prądu, ZESPÓL SZKÓŁ ELEKTRONICZNY
syposz,podstawy automatyki, ZŁOŻONE UKŁADY REGULACJI
09 Uklady regulacji
4 Dyskretne uklady regulacji, Nieznany (2)
5 Regulacja położenia sań
więcej podobnych podstron