Rozdział 2
Topologie
2.1. Wprowadzenie
Jak już o tym wspomniano w podrozdziale 1.1, impulsowe układy transformu-
jące napięcia przemienne umożliwiają zmianę napięcia, a przez to prądu oraz
mocy obciążeni, bez zmiany częstotliwości jego harmonicznej podstawowej.
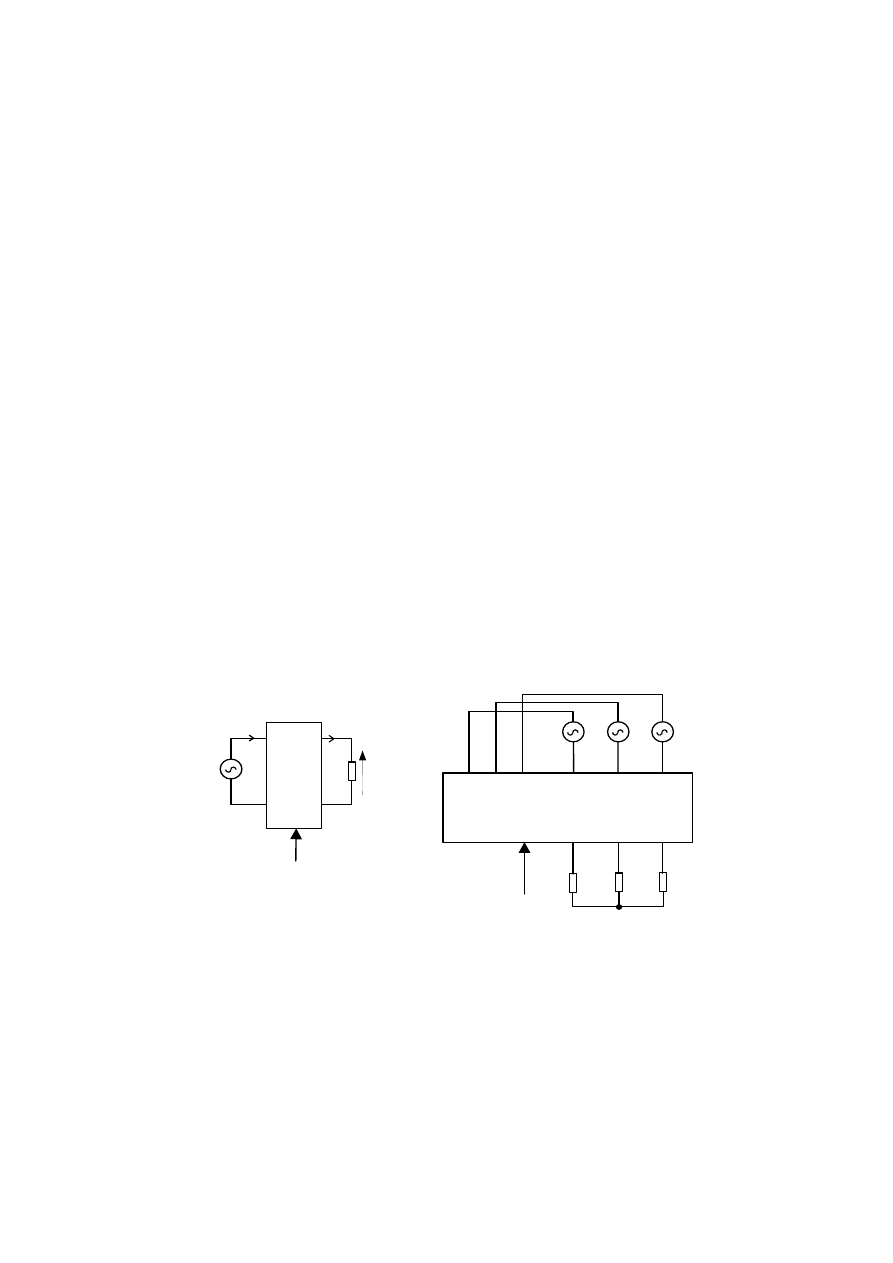
Schematy blokowe takich układów pokazano na rys. 2.1. Przekształtnik realizu-
jący zmianę napięcia obciążenia nazwano sterownikiem. Nazwę sterownik,
o czym już również wspomniano (podrozdział 1.1), wprowadzono w celu wy-
raźnego odróżnienia mniejszego zakresu funkcjonalnego przekształtników sto-
sowanych w omawianych układach od zakresu funkcjonalnego bezpośrednich
przekształtników matrycowych AC/AC.
u
S
i
S
Z
L
u
L
S
2
S
1
i
L
STEROWNI
K
a)
SYGNAŁ
STERUJĄCY
u
S1
Z
L2
u
S2
u
S3
A
1
B
1
C
1
A
0
B
0
C
0
Z
L3
Z
L1
ŁĄCZNIKI ŹRÓDŁA
LUB
SYGNAŁ
STERUJĄCY
A
2
B
2
C
2
STEROWNIK
b)
Rys. 2.1. Impulsowe układy transformujące napięcia przemienne,
a) jednofazowy, b) trójfazowy
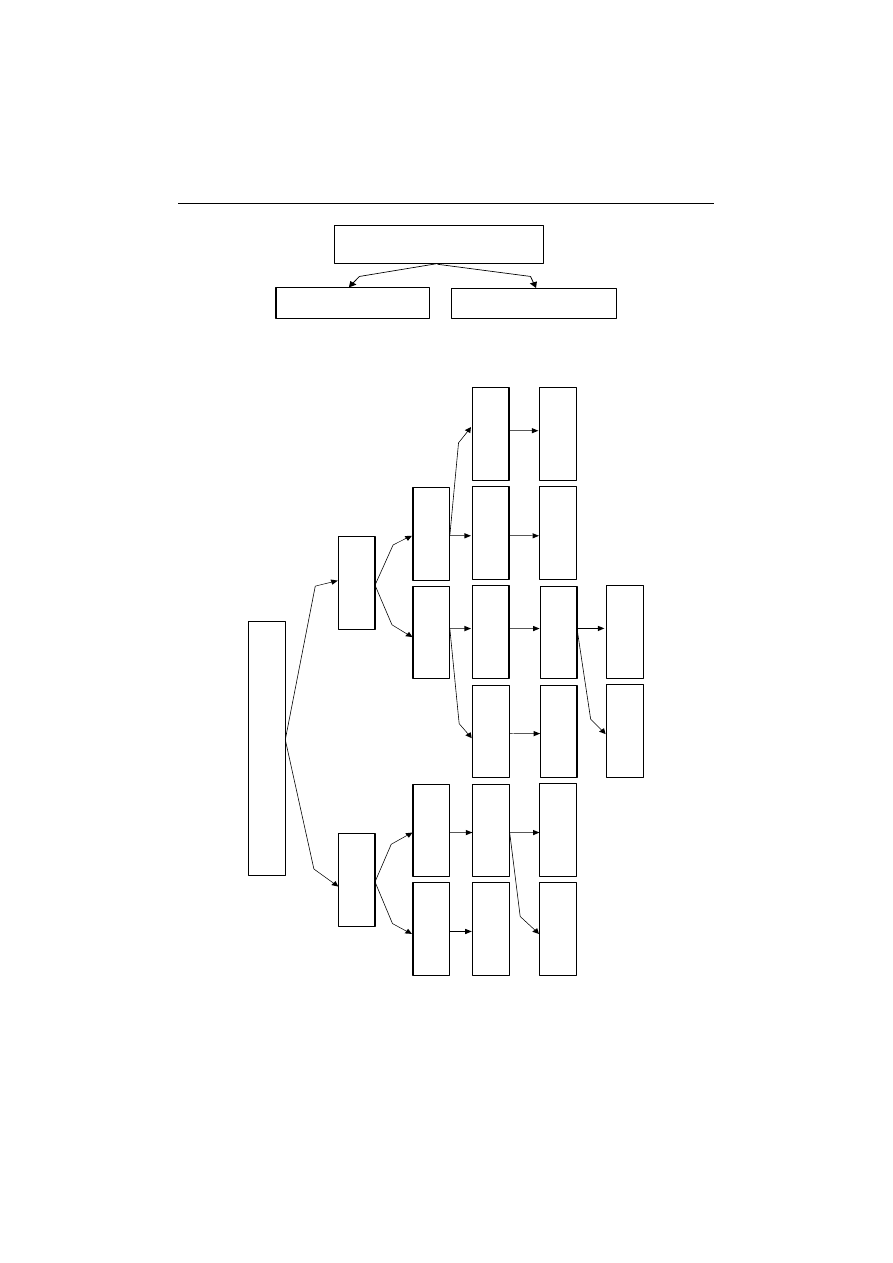
Propozycję systematyki sterowników stosowanych w impulsowych ukła-
dach transformujących napięcia przemienne, którą przyjęto w monografii, ilu-
strują rysunki 2.2 oraz 2.3.
14 2. Topologie
S T E R O W N IK I
Im p u lso w y c h U k ła d ó w
T ra n sfo rm u ją c y c h N a p ię c ia P rz e m ie n n e
M A T R Y C O W O -
R E A K T A N C Y J N E (S M R )
M A T R Y C O W E
(S M )
Rys. 2.2. Ogólny podział sterowników stosowanych w impulsowych układach trans-
formujących napięcia przemienne
S
TER
OW
N
IK
I MATRY
C
OWE
(
S
M
),
ST
ERO
W
NIK
I M
A
TR
YC
OW
O
-RE
AK
T
A
NC
Y
JNE
(
S
M
R
)
SM, S
M
R
JE
DN
O
F
AZ
O
W
E
DW
UB
IEG
U
N
O
W
E
JE
DN
O
-
B
IEG
U
N
O
W
E
SM
, SM
R
TR Ó
JF
A
Z
O
W
E
NI
E-
SY
M
E
T
R
YCZ
NE
SY
M
E
T
R
YCZ
NE
IZ
OL
O
W
ANE
IZ
O
L
O
W
ANE P
W
M
PWM, FA
ZOW
E
PWM
JE
DN
O-
BI
EG
UN
O
W
E
DWU
B
IE
G
U
NOWE
IZO
L
O
W
ANE
IZ
OL
O
W
AN
E P
W
M
PWM,
FA
ZO
WE
PWM
JE
DN
O
-
BI
E
G
UN
OW
E
IZ
O
L
O
W
A
N
E
P
W
M
DW
UB
IE
G
U
N
O
W
E
IZ
OL
O
W
AN
E P
W
M
Rys. 2.3. Schemat blokowy systematyki sterowników stosowanych w impulsowych
układach transformujących napięcia przemienne
2.1. Wprowadzenie 15
Sterowniki stosowane w omawianych układach dzielą się na sterowniki ma-
trycowe (SM) oraz sterowniki matrycowo-reaktancyjne (SMR). Topologie SM
bazują na topologiach przekształtnika singularnego (jednofazowe) [153], oraz
przekształtnika matrycowego o zredukowanej ilości łączników (trójfazowe)
[55], [155]. Topologie sterowników SMR bazują na topologiach przekształtni-
ków DC/DC. SMR jednofazowe są budowane poprzez zastąpienie łączników
jednokierunkowych i diod łącznikami dwukierunkowymi. Zestawienie topologii
SMR jednofazowych, w którym wykorzystano zestawienie topologii prze-
kształtników DC/DC przedstawione w pracy [149], zamieszczono w dodatku A.
SMR trójfazowe są budowane przez połączenie topologii jednofazowych.
W dalszym podziale wyróżnia się SM oraz SMR jedno- i dwubiegunowe
(rys. 2.3), a wyróżnikiem jest, jak już o tym wspomniano (podrozdz. 1.2), bie-
gunowość harmonicznej podstawowej napięcia obciążenia.
Topologie i realizacje układowe SM oraz SMR były przedmiotem wielu
prac omówionych wcześniej w podrozdziale 1.2. Układy z SM lub SMR, przed-
stawione w tym rozdziale były przedmiotem prac własnych autora [16] – [22]
oraz prac zespołowych z udziałem autora [23] – [42], [44], [51], [68], [71], [78]
– [87], [116], [118] – [129], [131] – [133], [147].
2.2. Układy matrycowe
2.2.1. Sterowniki matrycowe
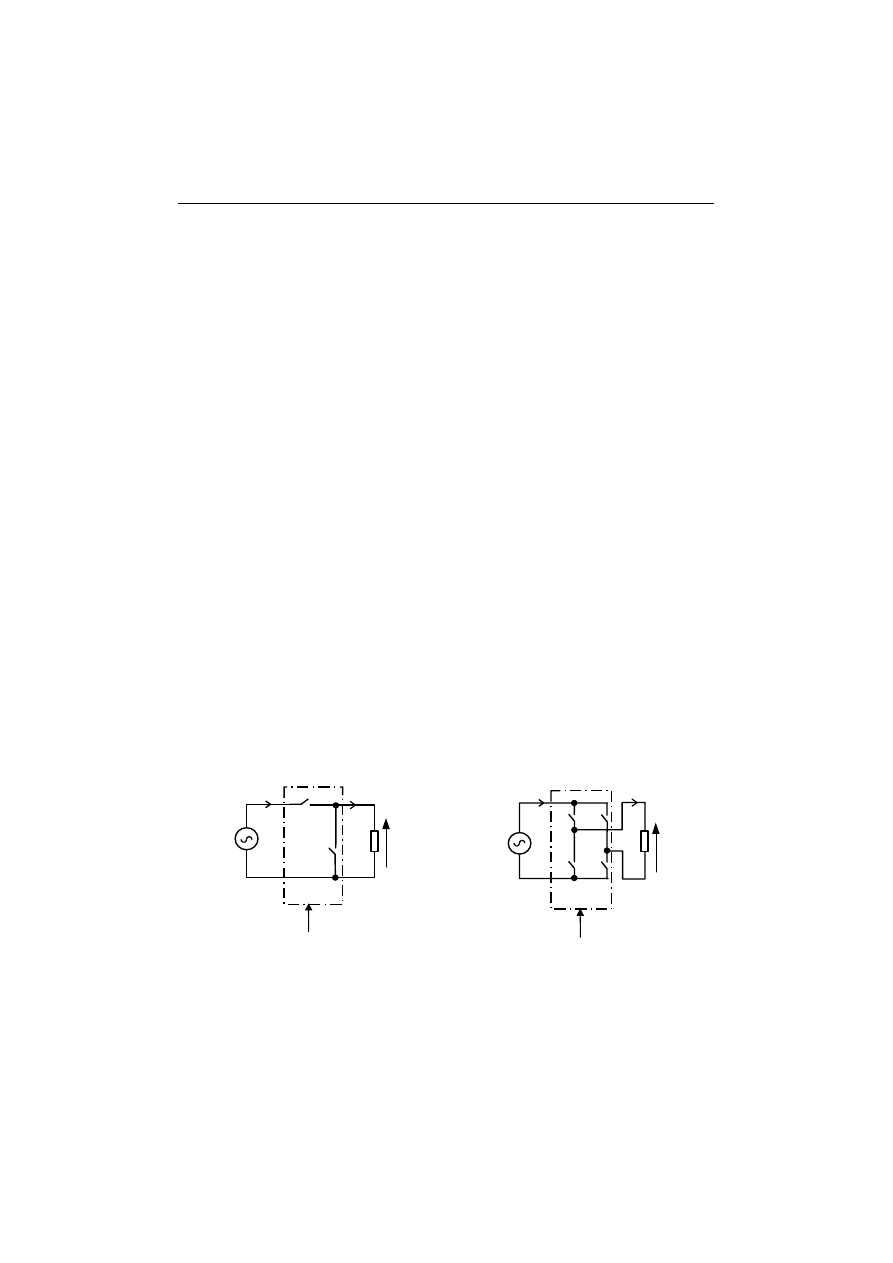
Schematy zastępcze najprostszych impulsowych układów transformujących
napięcie przemienne pokazano na rys. 2.4. Są to układy jednofazowe z mode-
lami obwodowymi SM z łącznikami idealnymi (podrozdz.1.4, p.1)) [12], [153].
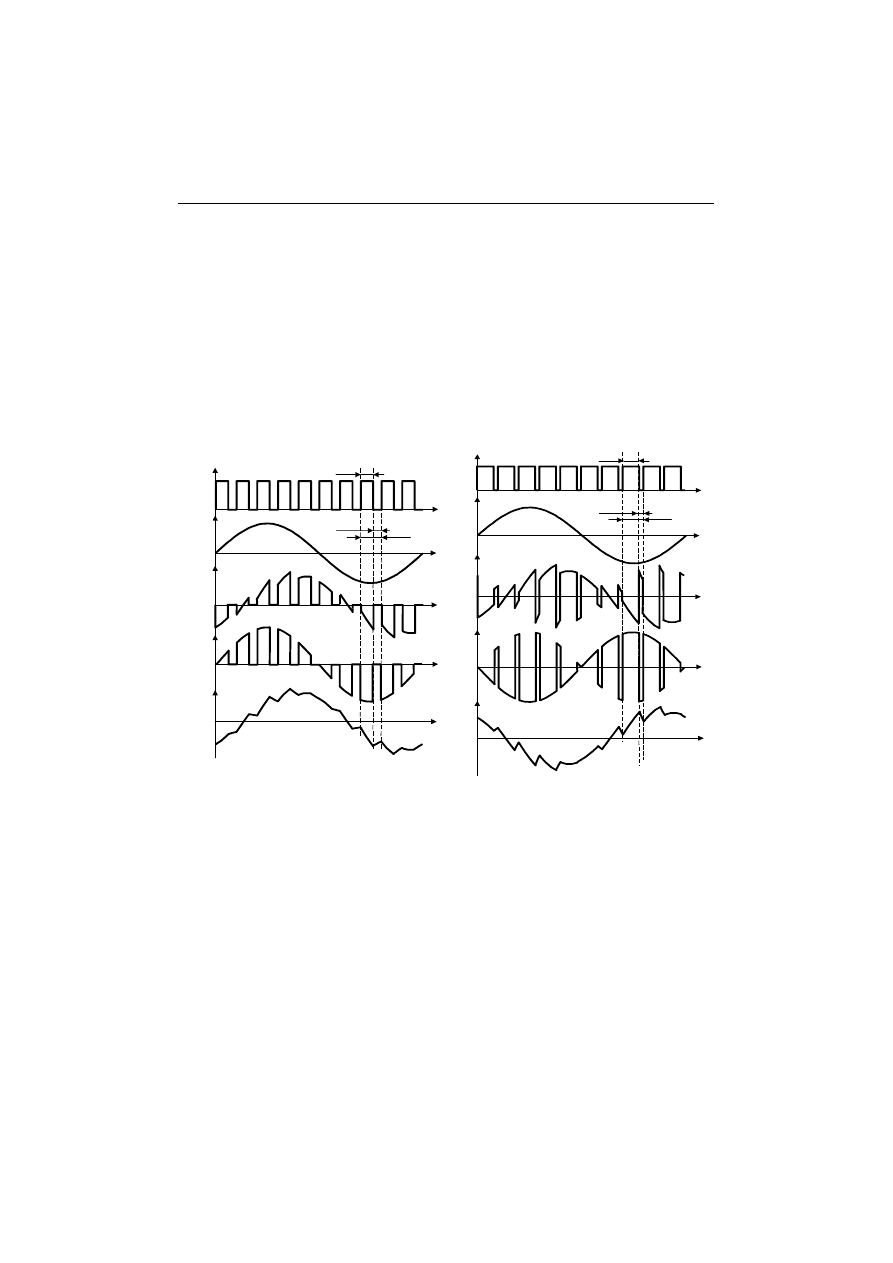
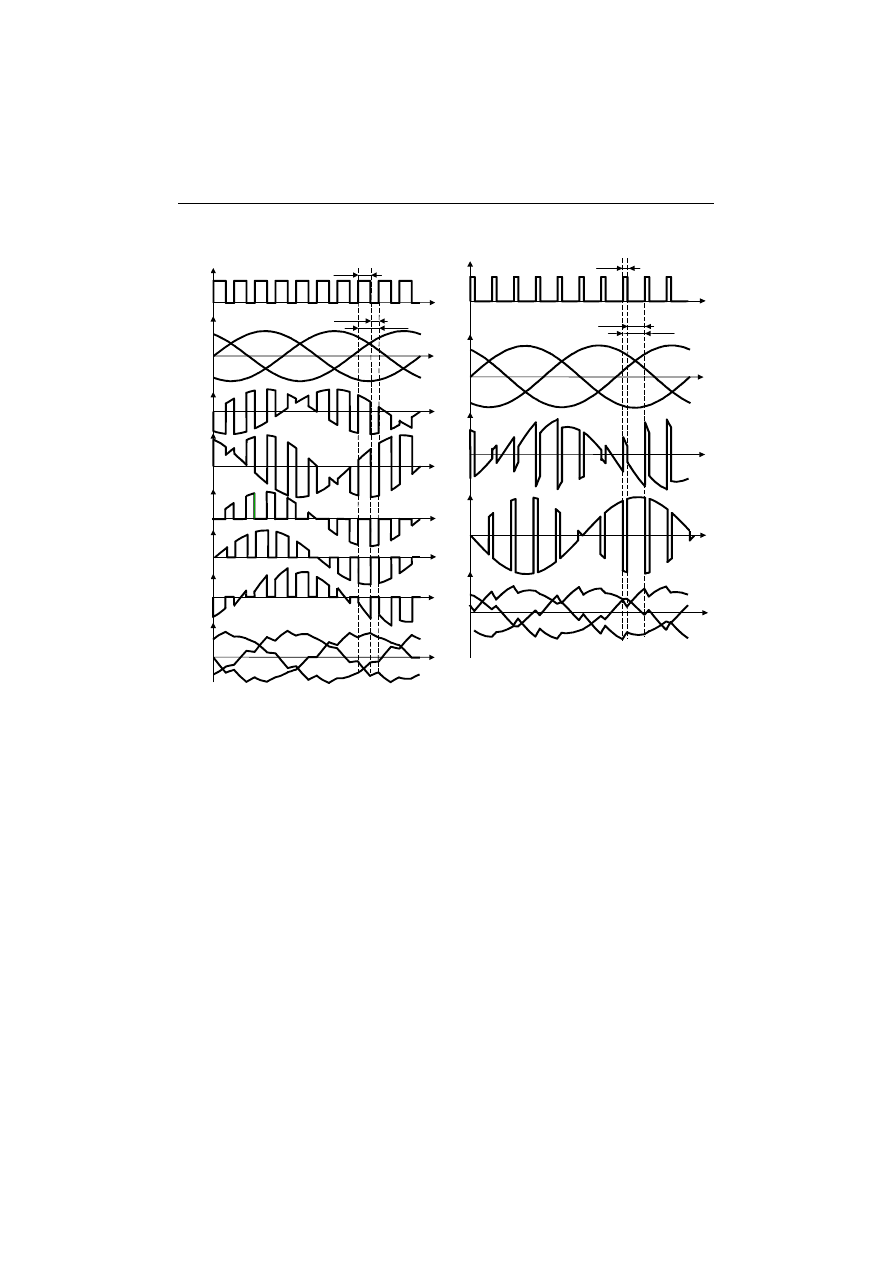
Działanie tych układów, przy obciążeniu rezystancyjno-indukcyjnym(RL), ilu-
strują przebiegi czasowe pokazane na rys. 2.5.
u
S
i
S
Z
L
u
L
S
2
S
1
i
L
SM
a)
D
u
S
i
S
Z
L
u
L
S
2
S
1
i
L
S
3
S
4
SM
b)
D
Rys. 2.4. Układy jednofazowe z modelami obwodowymi SM z łącznikami idealnymi,
a) z SM jednobiegunowym, b) z SM dwubiegunowym
16 2. Topologie
SM jednobiegunowy (rys. 2.4a) składa się z dwóch łączników, łącznika
źródła S
1
i łącznika obciążenia S
2
. Łącznik źródła przyłącza źródło zasilania do
obciążenia, a łącznik obciążenia umożliwia przepływ prądu obciążenia po odłą-
czeniu źródła zasilania. W czasie t
1
do obciążenia jest przyłączane napięcie
źródła u
S
za pomocą łącznika źródła S
1
. Wówczas energia elektryczna jest do-
starczana ze źródła do obciążenia lub odwrotnie. W czasie t
2
łącznik źródła jest
wyłączony, napięcie obciążenia u
L
ma wartość równą zeru, a prąd obciążenia i
L
jest podtrzymywany za pomocą włączonego łącznika obciążenia S
2
. Podczas
pracy układu jest zmieniana wartość współczynnika wypełnienia impulsu
D = t
1
/T
S
, który spełnia funkcję wielkości sterującej.
t
t
t
t
t
s
1
(t)
u
S
i
S
u
L
i
L
T/2
T
T
S
t
2
t
1
a)
t
t
t
t
t
s
1
(t)
u
S
i
S
u
L
i
L
T/2
T
T
S
t
2
t
1
s
4
(t)
b)
Rys. 2.5. Przykłady przebiegów czasowych napięć i prądów w układach z SM,
a) jednobiegunowym (rys. 2.4a) dla D = 0,6, b) dwubiegunowym (rys. 2.4b) dla
D = 0,8; D = t
1
/ T
S
– współczynnik wypełnienia impulsu
SM dwubiegunowy (rys. 2.4b) ma cztery łączniki w pełni wyłączalne S
1
–
S
4
. Łączniki S
1
, S
4
oraz łączniki S
2
, S
3
przyłączają na przemian źródło zasilania
do obciążenia. Umożliwia on zmianę biegunowości napięcia przyłączanego do
obciążenia. W czasie t
1
do obciążenia jest przyłączane napięcie źródła zasilają-
cego u
S
za pomocą łączników S
1
, S
4
. Następnie w czasie t
2
do obciążenia jest
przyłączane napięcie źródła o odwrotnej polaryzacji -u
S
za pomocą łączników
S
2
, S
3
. W obydwu przedziałach czasu energia elektryczna jest dostarczana ze
źródła do obciążenia lub odwrotnie. Podobnie jak w układzie jednobiegunowym
wielkością sterującą jest współczynnik wypełnienia impulsu D.
2.2. Układy matrycowe 17
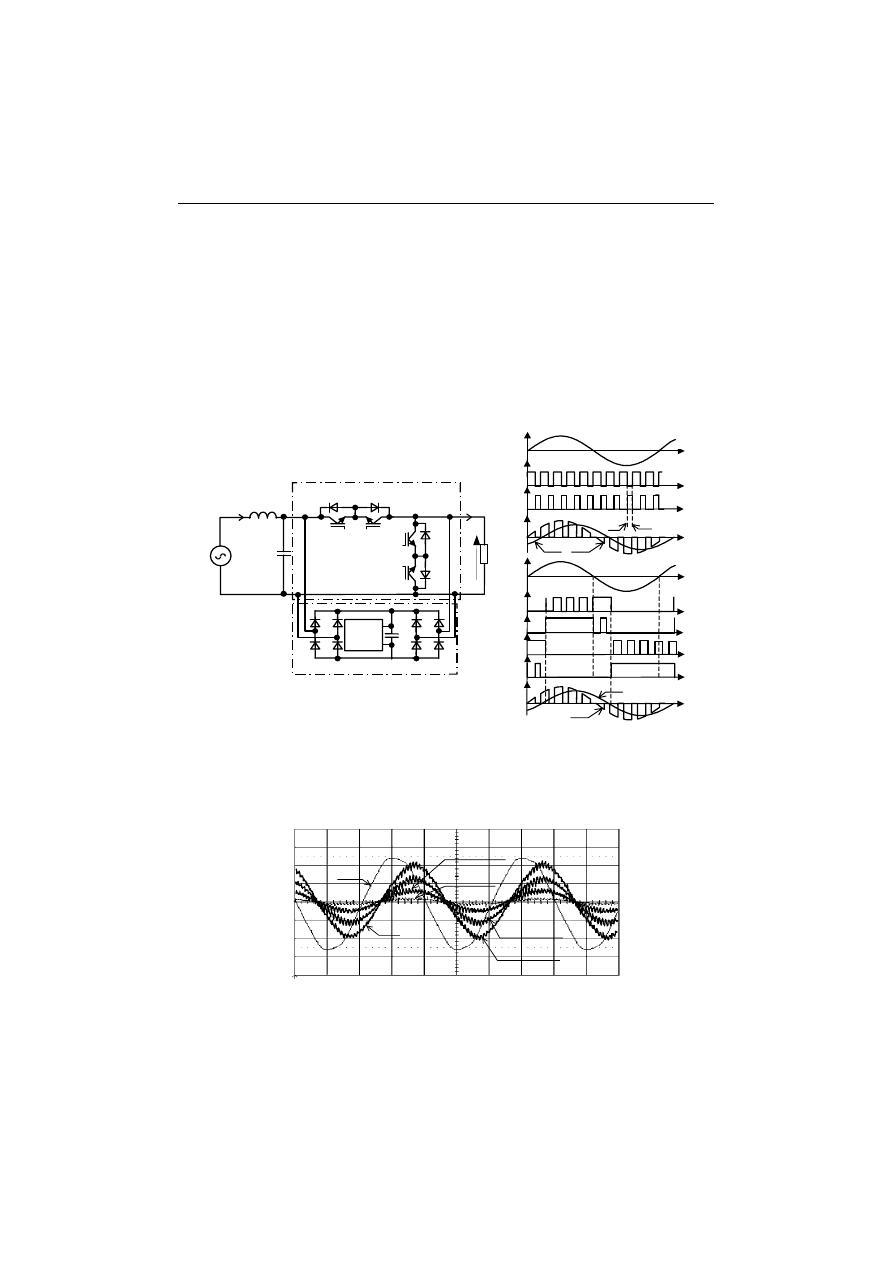
Przykład realizacji układowej SM jednobiegunowego pokazano na rys. 2.6,
natomiast oscylogramy wybranych przebiegów prądu obciążenia w tym ukła-
dzie pokazano na rys. 2.7. [25], [27]. W przypadku stosowania sterowania typu
PWM z “czasem martwym” (rys. 1.2b), w którym wszystkie tranzystory
w układzie są wyłączone, w omawianym układzie występują przepięcia powo-
dowane zjawiskiem samoindukcji. Korzystniejsze rozwiązanie ochrony prze-
pięciowej w tym układzie, zaproponowane w pracy [91] (układ regeneracyjny),
jest pokazane na rys. 2.8. Takie rozwiązanie umożliwia ochronę przepięciową
z odzyskiwaniem energii elektrycznej gromadzonej w kondensatorach C
S
i C
F
podczas komutacji.
u
S
i
S
Z
L
u
L
D
1
T
1
i
L
T
2
T
4
T
3
D
2
D
4
D
3
a)
L
F
C
F
t
s
T1,2
(t)
t
t
t
u
L
s
T2
(t)
s
T4
(t)
s
T3
(t)
u
S
i
L
b)
SM
OA
C
S
UOT
s
T3,4
(t)
t
δ
t
δ
t
t
t
t
u
S
i
L
c)
s
T1
(t)
t
t
u
i
u
L
u
i
Rys. 2.6. Układ z SM jednobiegunowym, a) schemat ideowy, b) przykładowe przebiegi
czasowe przy sterowaniu z “czasem martwym” t
δ
(rys. 1.2b), c) przykładowe przebiegi
czasowe przy sterowaniu bez “czasu martwego”; OA – obciążenie aktywne, UOT –
układ obejściowo-tłumiący
u
S
D=0,1
D=0,25
D=0,5
D=0,75
i
L
Rys. 2.7. Oscylogramy prądu obciążenia w układzie jak na rys. 2.6 przy sterowaniu
z “czasem martwym” dla f
S
= 1 kHz; X = 5 ms/dz., Y
1
= 50 V/dz, Y
2
= 0,5 A/dz.
18 2. Topologie
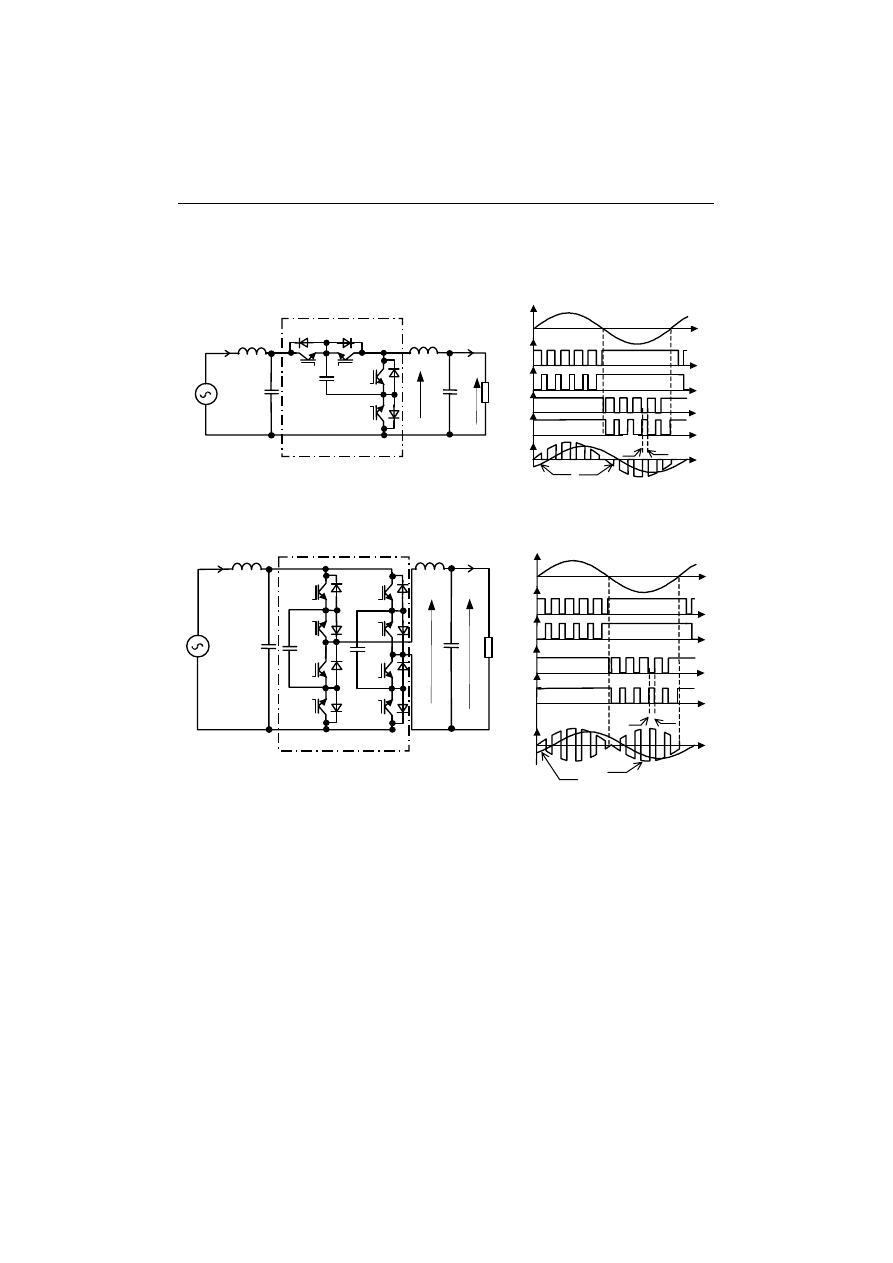
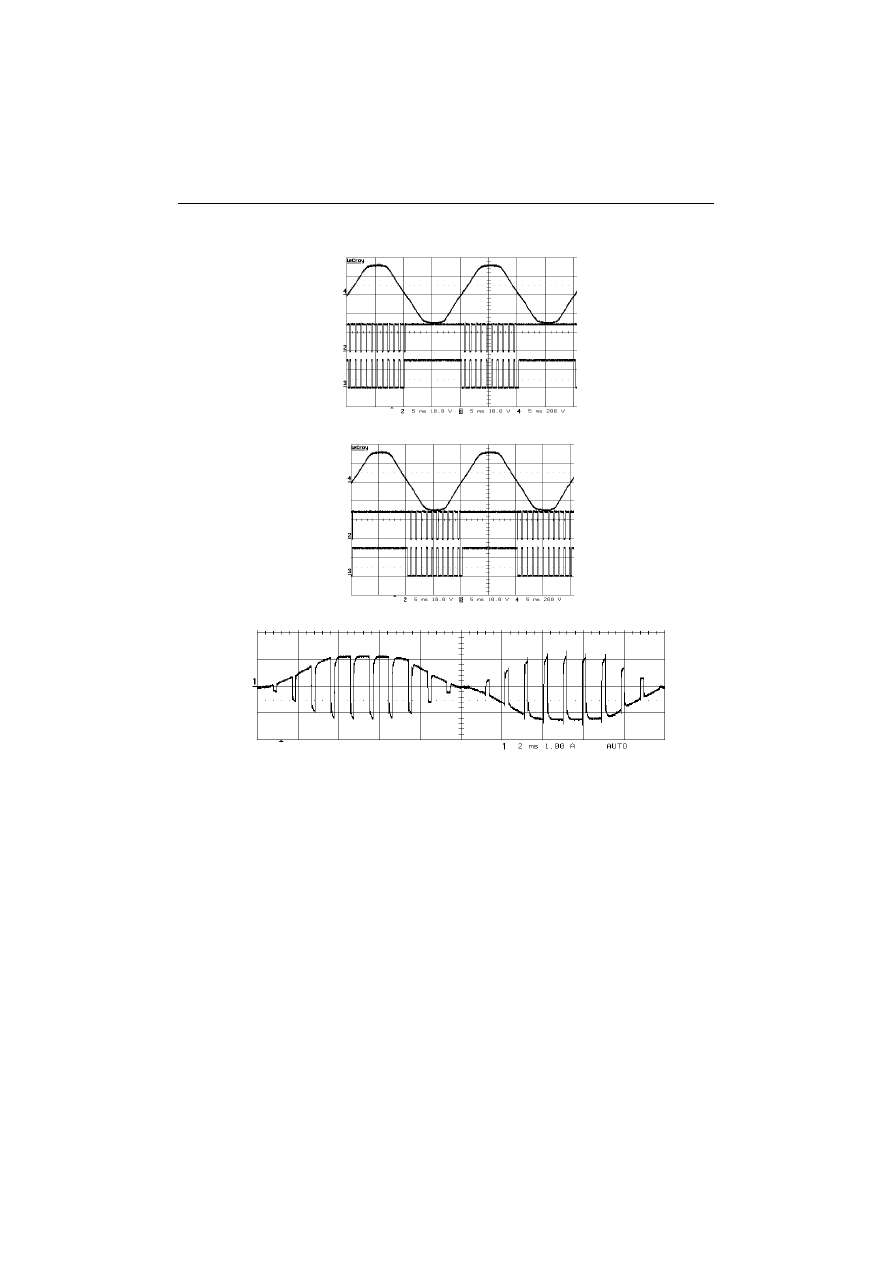
Przykład realizacji układowej SM dwubiegunowego oraz oscylogramów
napięć w tym układzie, które zaczerpnięto z pracy [61] (praca dyplomowa wy-
konana pod kierunkiem autora), pokazano na rysunkach 2.9 oraz 2.10.
u
S
i
S
Z
L
u
L
T
1
i
L
SM
T
2
T
3
a)
C
F
L
F
C
F
C
S
L
F
D
1
D
2
D
3
T
4
D
4
t
s
T1
(t)
t
t
t
t
t
u
2
s
T2
(t)
s
T4
(t)
s
T3
(t)
u
S
b)
t
δ
t
δ
u
2
i
L
u
i
Rys. 2.8. Układ z SM jednobiegunowym, a) schemat ideowy, b) przykładowe przebiegi
czasowe; t
δ
- “czas martwy” (rys. 1.2b)
s
T5
(t)
s
T6
(t)
s
T7
(t)
s
T8
(t)
s
T3
(t)
s
T4
(t)
u
S
i
S
Z
L
u
L
T
1
i
L
SM
T
2
T
3
a)
C
F
L
F
C
F
C
S
L
F
D
1
D
2
D
3
T
4
D
4
t
s
T1
(t)
s
T2
(t)
t
t
t
t
t
u
S
b)
t
δ
t
δ
u
2
C
S
T
5
T
6
T
7
T
8
D
5
D
6
D
7
D
8
u
2
i
L
u
i
Rys. 2.9. Układ z SM dwubiegunowym, a) uproszczony schemat ideowy, b) przebiegi
czasowe sygnałów sterujących; t
δ
– “czas martwy” (rys. 1.2b)
W omawianych układach, oprócz SM, są zwykle stosowane wejściowe oraz
wyjściowe filtry pasywne LC, jak jest to pokazane na rysunkach rys. 2.6,
rys. 2.8 oraz rys. 2.9. Są one stosowane w celu zmniejszenia odkształceń (wy-
eliminowania wyższych harmonicznych) napięcia obciążenia oraz prądu źródła.
Szczegółowa analiza doboru parametrów filtrów jest najszerzej przedstawiona
w pracach [47] – [49]. Ponadto, zarówno w układach o sterowaniu PWM
z “czasem martwym” jak i bez “czasu martwego” są stosowane lokalne
i globalne układy do ochrony przepięciowej, których rozwiązania pokazano
odpowiednio na rysunkach rys. 2.8, rys. 2.9 (C
S
i C
F
) oraz rys. 2.6 (UOT) [27],
[91], [126], [134].
2.2. Układy matrycowe 19
a)
b)
c)
Rys. 2.10. Oscylogramy w układzie pokazanym na rys. 2.9 dla D = 0,8 [61],
a) napięcia zasilania i sygnałów sterujących tranzystory T
1
– T
4
, b) napięcia zasila-
nia i sygnałów sterujących tranzystory T
5
– T
8
, c) napięcia wyjściowego u
2
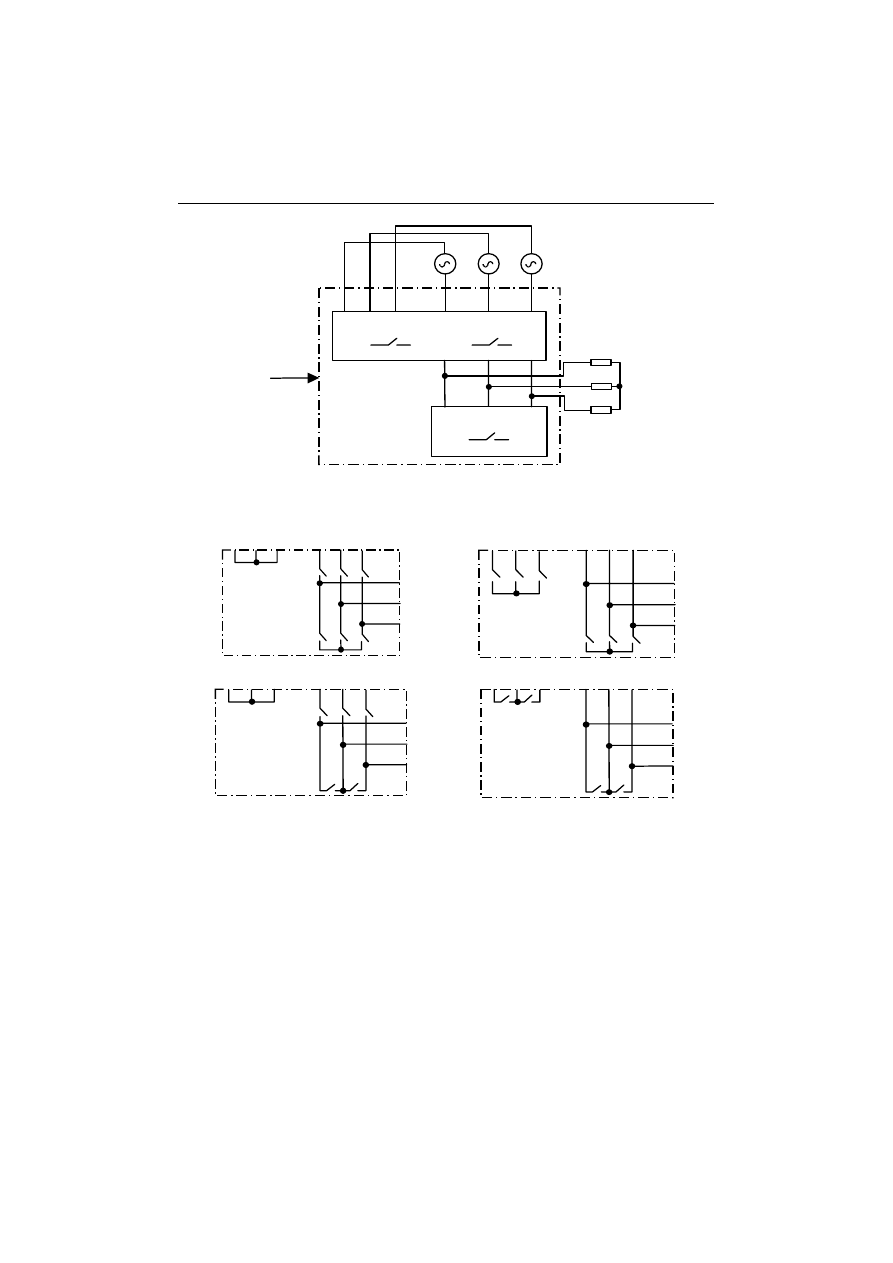
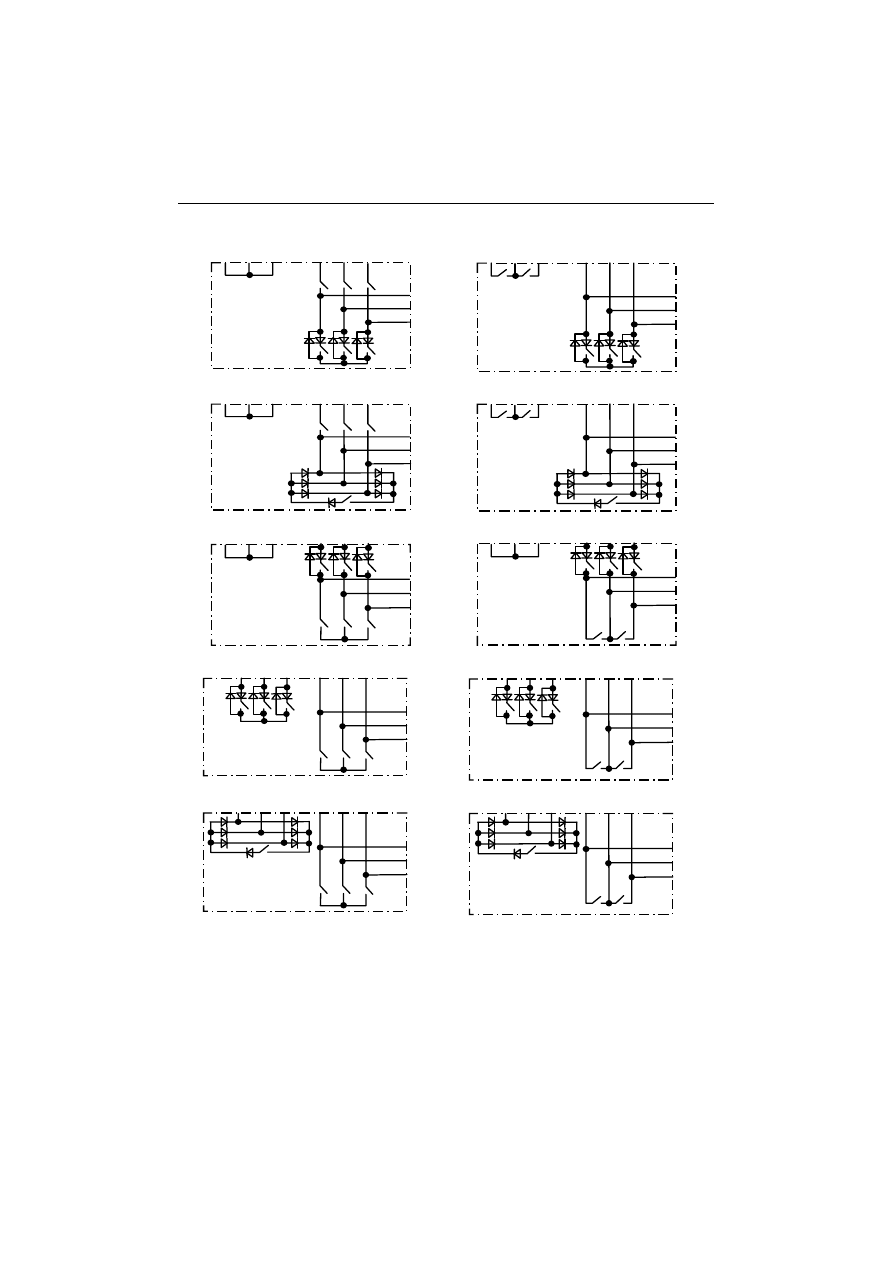
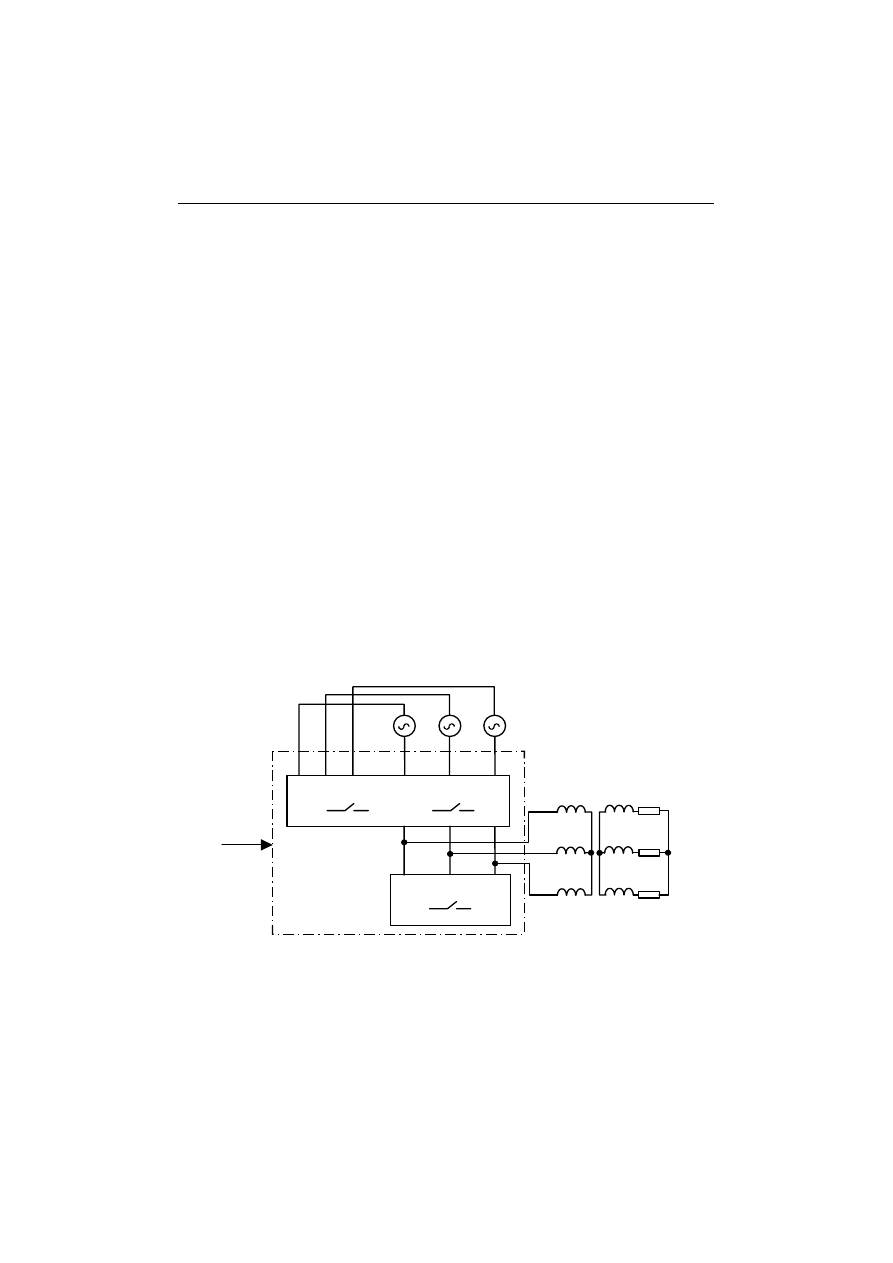
Ogólny schemat blokowy układów trójfazowych z SM jednobiegunowymi
pokazano na rys. 2.11. Topologie trójfazowych SM jednobiegunowych syme-
trycznych i niesymetrycznych, w których wykorzystano modele obwodowe
z łącznikami idealnymi (podrozdz. 1.4, p.1)), pokazano na rysunkach 2.12 –
2.15. Jest istotne, że topologie SM symetrycznych pokazane na rysunkach
rys. 2.12b, d, rys. 2.13b, d, g, h, i, j oraz rys. 2.14c, d, e, f wymagają dostępu do
wszystkich zacisków fazowych źródła napięcia zasilania. Pozostałe topologie
SM symetrycznych oraz niesymetrycznych mogą być stosowane w układach
trójfazowych zasilanych z typowej sieci przemysłowej wymagają dostępu do
trzech zacisków fazowych źródeł napięcia zasilania.
20 2. Topologie
u
S1
Z
L2
u
S2
u
S3
A
1
B
1
C
1
A
0
B
0
C
0
Z
L3
Z
L1
ŁĄCZNIKI ŹRÓDŁA
ŁĄCZNIKI OBC.
SM
LUB
D
A
2
B
2
C
2
Rys. 2.11. Ogólny schemat blokowy układów trójfazowych z SM jednobiegunowymi
A
1
B
1
C
1
A
0
B
0
C
0
A
2
B
2
C
2
S
1
S
2
S
3
S
4
S
5
S
6
a)
SM
A
1
B
1
C
1
A
0
B
0
C
0
A
2
B
2
C
2
S
1
S
2
S
3
S
4
S
5
S
6
b)
SM
A
1
B
1
C
1
A
0
B
0
C
0
A
2
B
2
C
2
S
1
S
2
S
3
S
4
S
5
c)
SM
A
1
B
1
C
1
A
0
B
0
C
0
A
2
B
2
C
2
S
1
S
2
S
4
S
5
d)
SM
Rys. 2.12. Topologie SM jednobiegunowych symetrycznych z: a), b) 3+3, c) 3+2,
d) 2+2 łącznikami dwukierunkowymi
Podstawowym kryterium stosowanym przy ocenie użyteczności topologii
pokazanych na rysunkach 2.12 – 2.15 jest ocena wartości wewnętrznych strat
mocy, które występują podczas przewodzenia oraz komutacji łączników stoso-
wanych w tych topologiach. Wartość tych strat mocy jest zależna od ilości sto-
sowanych łączników oraz częstotliwości przełączania f
S
. Szczegółowa analiza
wewnętrznych strat mocy omawianych topologii jest przedstawiona w pracach
[16], [27], [119], [123] oraz [124].
2.2. Układy matrycowe 21
A
1
B
1
C
1
A
0
B
0
C
0
A
2
B
2
C
2
S
1
S
2
S
3
S
4
S
5
S
6
a)
SM
A
1
B
1
C
1
A
0
B
0
C
0
A
2
B
2
C
2
S
4
S
5
S
6
b)
SM
S
1
S
2
A
1
B
1
C
1
A
0
B
0
C
0
A
2
B
2
C
2
S
1
S
2
S
3
S
4
c)
SM
A
1
B
1
C
1
A
0
B
0
C
0
A
2
B
2
C
2
S
4
d)
SM
S
1
S
2
A
1
B
1
C
1
A
0
B
0
C
0
A
2
B
2
C
2
S
1
S
2
S
3
S
4
S
5
S
6
e)
SM
A
1
B
1
C
1
A
0
B
0
C
0
A
2
B
2
C
2
S
1
S
2
S
3
f)
SM
S
4
S
5
A
1
B
1
C
1
A
0
B
0
C
0
A
2
B
2
C
2
S
1
S
2
S
3
S
4
S
5
S
6
g)
SM
A
1
B
1
C
1
A
0
B
0
C
0
A
2
B
2
C
2
S
1
S
2
S
3
h)
SM
S
4
S
5
A
1
B
1
C
1
A
0
B
0
C
0
A
2
B
2
C
2
S
1
S
4
S
5
S
6
i)
SM
A
1
B
1
C
1
A
0
B
0
C
0
A
2
B
2
C
2
j)
SM
S
4
S
5
S
1
Rys. 2.13. Topologie SM jednobiegunowych symetrycznych z: a), e), g) 3+3, b) 2+3,
f), h) 3+2, c) 3+1, d) 2+1, i) 1+3, j) 1+2 łącznikami dwu- i jednokierunkowymi
Spośród topologii SM, które wymagają dostępu do trzech zacisków fazo-
wych źródeł zasilających, najbardziej efektywne są topologie pokazane na ry-
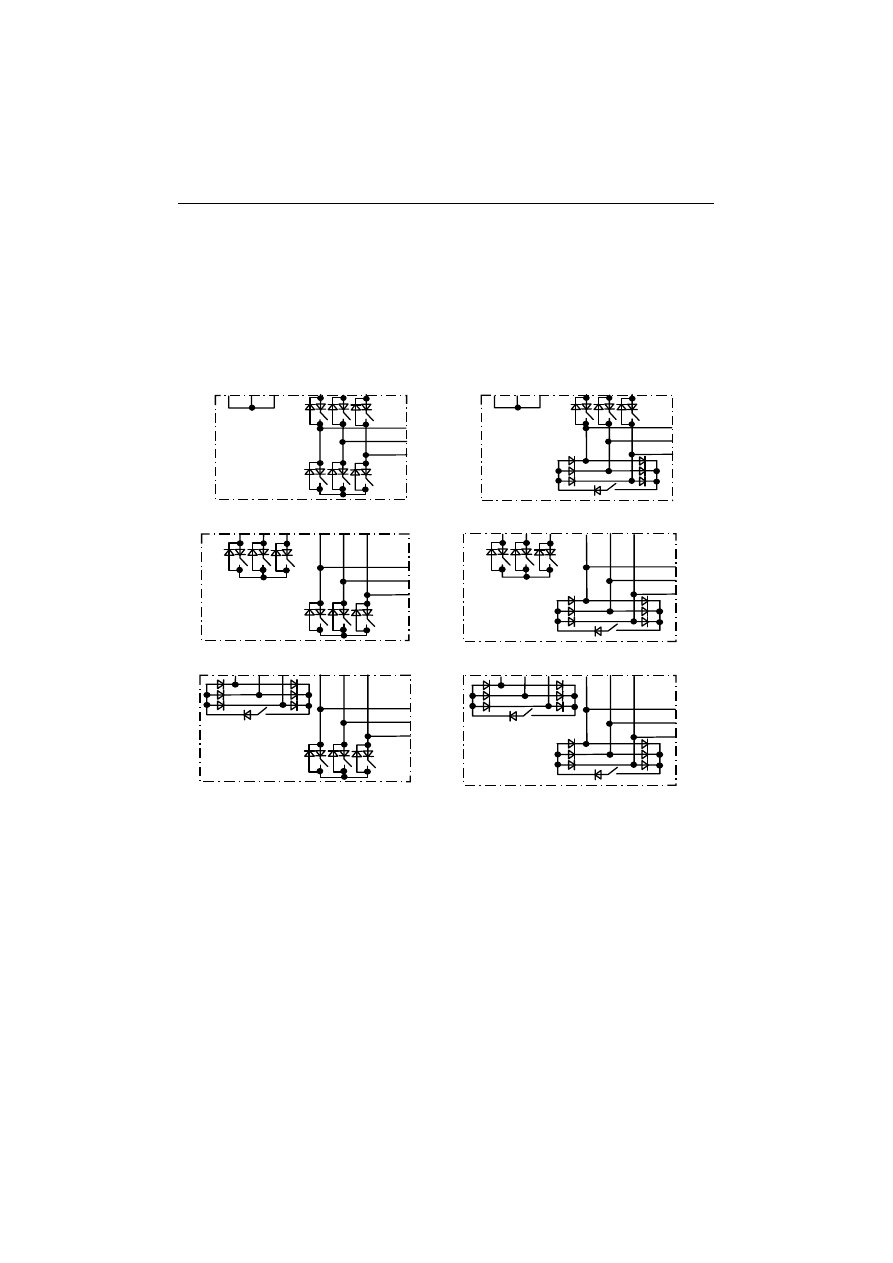
22 2. Topologie
sunkach 2.14a oraz b. W następnej kolejności są topologie SM pokazane na
rysunkach rys. 2.15c, rys. 2.13f, rys. 2.15d oraz rys. 2.15b. Spośród topologii
SM, które wymagają dostępu do wszystkich zacisków fazowych źródeł zasila-
jących, najbardziej efektywna jest topologia pokazana na rys. 2.14f. Układ o tej
topologii jest łatwy w realizacji przy wykorzystaniu transformatora separujące-
go, który daje dodatkowo izolację galwaniczną [147]. Realizacja takiego układu
jest omawiana dalej (porozdz. 2.2.2) i pokazana na rys. 2.26.
A
1
B
1
C
1
A
0
B
0
C
0
A
2
B
2
C
2
S
1
S
2
S
3
a)
SM
S
4
S
5
S
6
A
1
B
1
C
1
A
0
B
0
C
0
A
2
B
2
C
2
S
1
S
2
S
3
b)
SM
S
4
A
1
B
1
C
1
A
2
B
2
C
2
c)
SM
S
4
S
5
S
6
A
0
B
0
C
0
S
1
S
2
S
3
A
1
B
1
C
1
A
2
B
2
C
2
d)
SM
S
4
A
0
B
0
C
0
S
1
S
2
S
3
A
1
B
1
C
1
A
2
B
2
C
2
e)
SM
S
4
S
5
S
6
A
0
B
0
C
0
S
1
A
1
B
1
C
1
A
2
B
2
C
2
f)
SM
S
4
A
0
B
0
C
0
S
1
Rys. 2.14. Topologie SM jednobiegunowych symetrycznych z a), c) 3+3, b), d) 3+1,
e) 1+3, f) 1+1 łącznikami jednokierunkowymi
Wszystkie topologie SM jednobiegunowych (rysunki 2.12 – 22.15) można
analizować za pomocą dwóch schematów zastępczych, które pokazano na
rys. 2.16. Układ z SM symetrycznym (rys. 2.16a) składa się z trzech łączników
źródła S
1
– S
3
i dwóch łączników obciążenia S
4
, S
5
. Łączniki źródła przyłączają
poszczególne fazy źródła zasilania do obciążenia, a łączniki obciążenia umoż-
liwiają przepływ prądów obciążenia po odłączeniu źródła zasilania. Drugi
układ, pokazany na rys. 2.16b, ma tylko dwa łączniki źródła S
1
, S
2
przyłączają-
ce dwie fazy źródła zasilania do obciążenia. Jedna faza źródła zasilania jest
połączona bezpośrednio z obciążeniem. Łączniki obciążenia S
3
, S
4
, podobnie
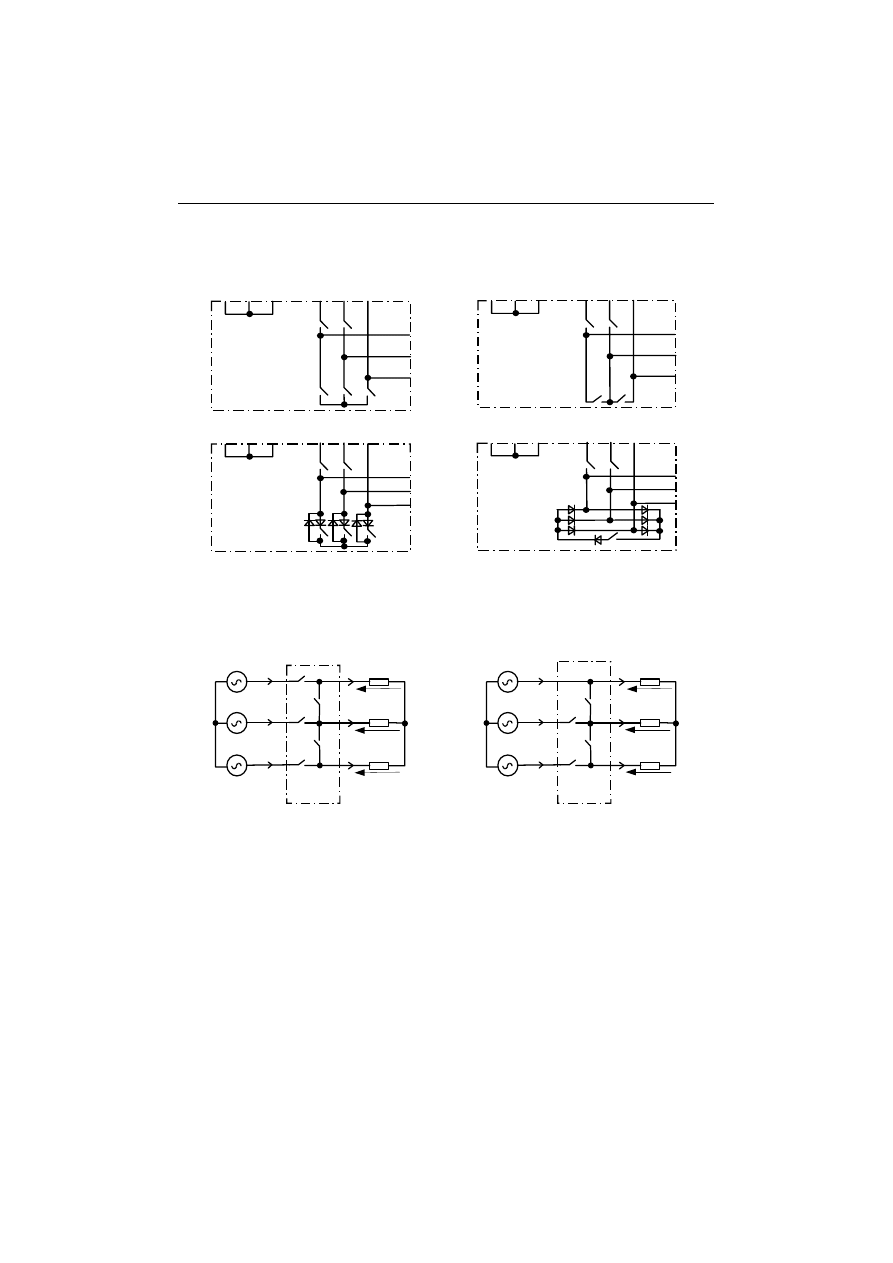
2.2. Układy matrycowe 23
jak w układzie symetrycznym, pozwalają na przepływ prądów obciążenia po
odłączeniu źródła zasilania.
A
1
B
1
C
1
A
0
B
0
C
0
A
2
B
2
C
2
S
1
S
2
S
4
S
5
S
6
a)
SM
A
1
B
1
C
1
A
0
B
0
C
0
A
2
B
2
C
2
S
1
S
2
S
4
S
5
b)
SM
A
1
B
1
C
1
A
0
B
0
C
0
A
2
B
2
C
2
c)
SM
S
4
S
5
S
6
S
1
S
2
A
1
B
1
C
1
A
0
B
0
C
0
A
2
B
2
C
2
d)
SM
S
4
S
1
S
2
Rys. 2.15. Topologie SM niesymetrycznych z a) 2+3, b) 2+2 łącznikami dwukierunko-
wymi oraz z c) 2+3, d) 2+1 łącznikami jedno- i dwukierunkowymi
u
S1
i
S1
Z
L1
u
L1
S
4
S
1
i
L1
a)
SM
u
S2
i
S2
S
2
i
L2
u
S3
i
S3
S
3
i
L3
S
5
Z
L2
Z
L3
N
S
N
L
u
L2
u
L3
u
1
u
2
u
3
u
S1
i
S1
Z
L1
u
L1
S
3
i
L1
b)
SM
u
S2
i
S2
S
1
i
L2
u
S3
i
S3
S
2
i
L3
S
4
Z
L2
Z
L3
N
S
N
L
u
L2
u
L3
u
1
u
2
u
3
Rys. 2.16. Schematy zastępcze trójfazowych układów z SM jednobiegunowymi,
a) układ z SM symetrycznym, b) układ z SM niesymetrycznym
Działanie układu z SM symetrycznym (rys. 2.16a) jest podobne do działa-
nia układu jednofazowego, opisanego wcześniej (rys. 2.5a). Należy tylko
uwzględnić przesunięcie fazowe występujące w poszczególnych fazach układu.
Na rys. 2.18a pokazano przebiegi czasowe napięć i prądów ilustrujące działanie
układu z SM niesymetrycznym (rys. 2.16b). W tym układzie fazowe źródło
napięcia zasilania u
S1
jest połączone bezpośrednio z obciążeniem Z
L1
. W czasie
t
1
do pozostałych faz obciążenia są przyłączane fazowe źródła u
S2
, u
S3
za pomocą łączników źródła S
1
, S
2
. Energia elektryczna jest wówczas dostar-
czana ze źródła do obciążenia lub odwrotnie. W czasie t
2
łączniki źródła są wy-
24 2. Topologie
łączone, napięcia fazowe obciążenia mają wartość równą zero, a prądy fazowe
obciążenia są podtrzymywane za pomocą włączonych łączników obciążenia S
3
,
S
4
.
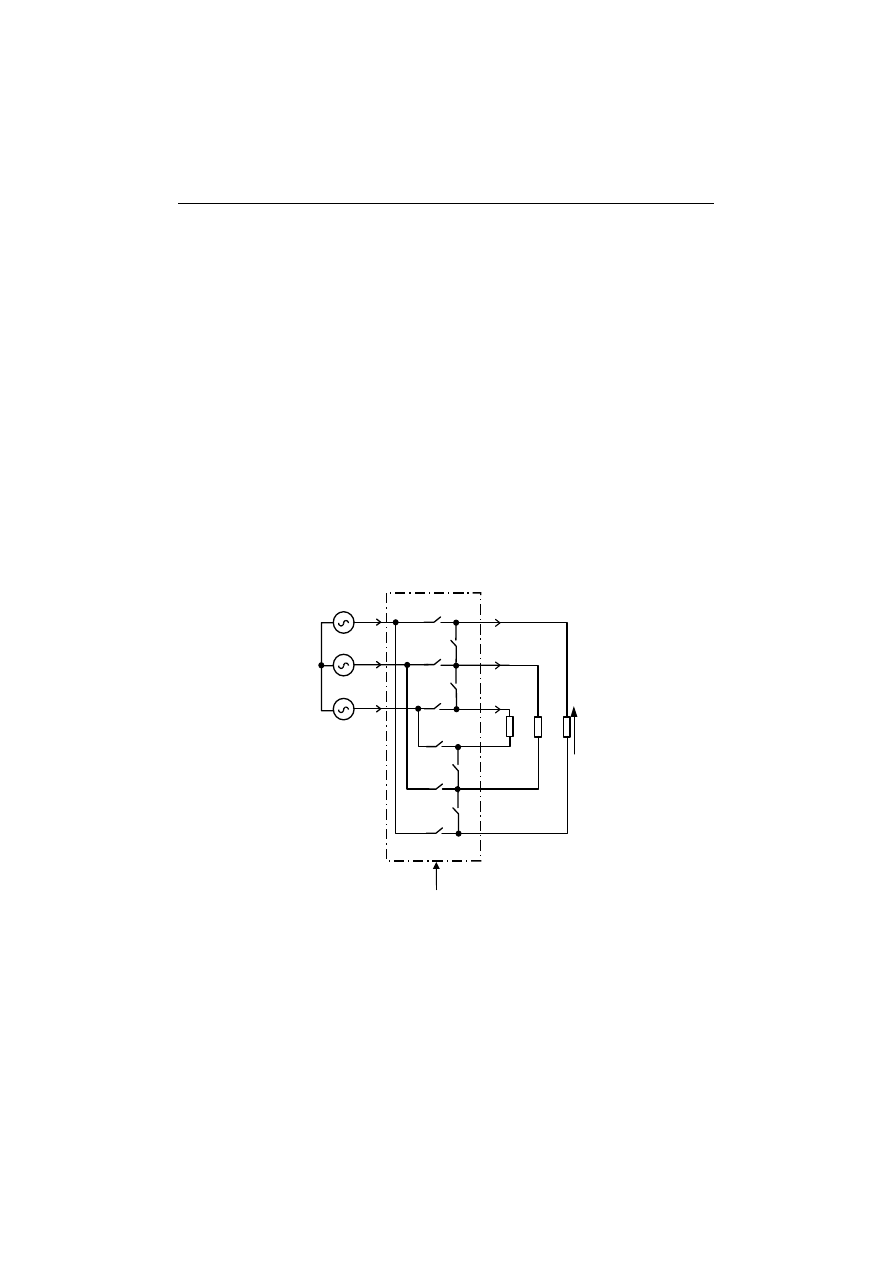
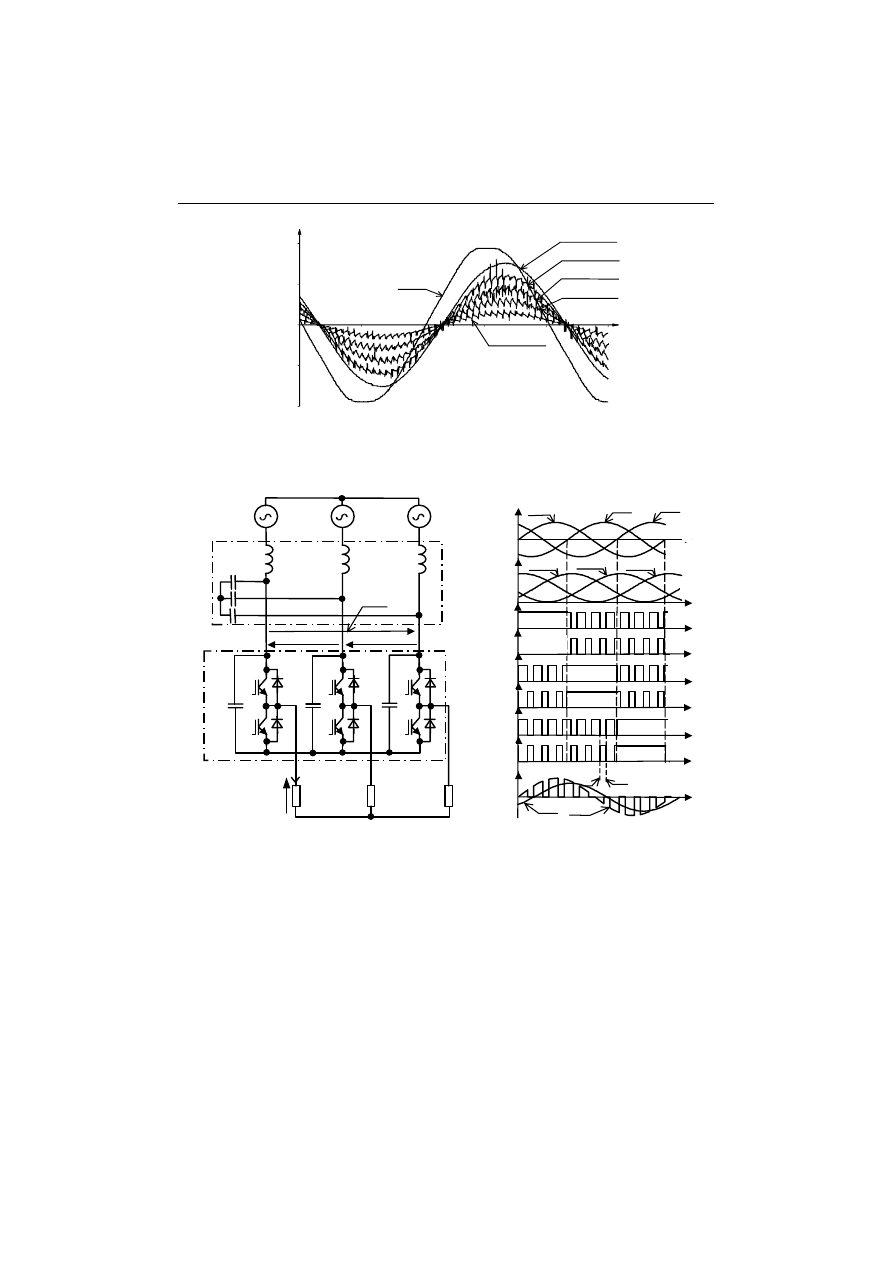
Schemat zastępczy trójfazowego układu z SM dwubiegunowym pokazano
na rys. 2.17. Przykładowe przebiegi czasowe ilustrujące działanie tego układu
pokazano na rys. 2.18b. W czasie t
1
do obciążenia są przyłączane napięcia fa-
zowe źródła u
S1
, u
S2
, u
S3
za pomocą łączników S
1
– S
5
, przy czym łączniki S
4
, S
5
zwierają końce obciążeń fazowych. Następnie w czasie t
2
łączniki S
1
– S
5
są
wyłączane, a do obciążenia są przyłączane napięcia fazowe źródła o odwrotnej
polaryzacji -u
S1
, -u
S2
, -u
S3
za pomocą łączników S
6
, S
10
. Końce obciążeń fazo-
wych są wówczas zwierane za pomocą łączników S
9
, S
10
W obydwu przedzia-
łach czasu energia elektryczna jest dostarczana ze źródła do obciążenia lub od-
wrotnie. Podobnie jak w układzie dwubiegunowym jednofazowym (rys. 2.4b)
wielkością sterującą jest współczynnik wypełnienia impulsu D. Omawiana to-
pologia SM jest wykorzystywana właściwie tylko w
połączeniu
z transformatorem dodawczym w trójfazowych stabilizatorach napięcia prze-
miennego. Jest to wówczas układ z SM izolowanym, omawiany dalej w pod-
rozdziale 2.2.2 (rys. 2.28).
u
S1
i
S1
Z
L1
u
L1
S
9
S
1
i
L1
SM
u
S2
i
S2
S
2
i
L2
u
S3
i
S3
S
3
i
L3
S
10
Z
L2
Z
L3
N
S
S
5
S
8
S
7
S
6
S
4
D
Rys. 2.17. Schemat zastępczy układu trójfazowego z modelem obwodowym SM dwu-
biegunowego z łącznikami idealnymi
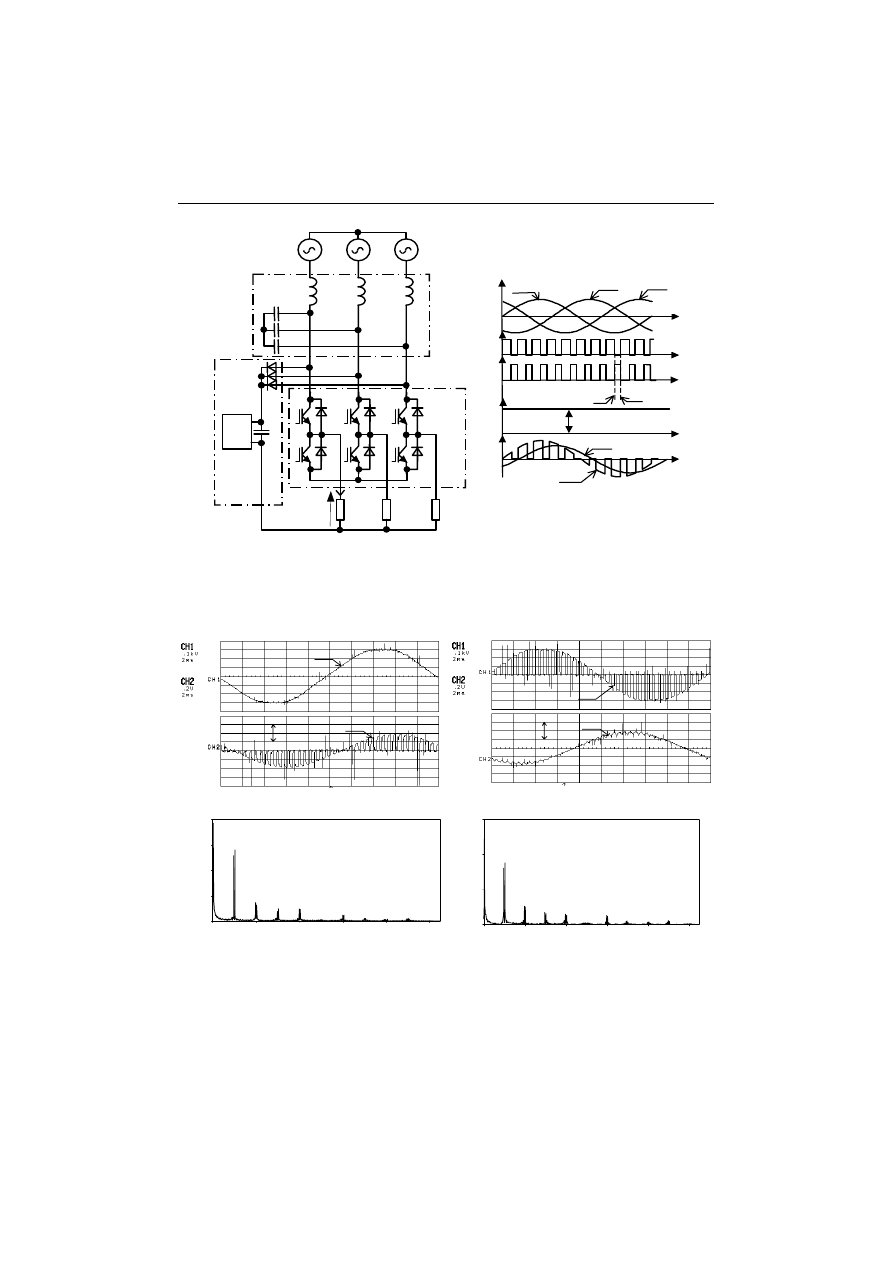
Przykład realizacji układowej trójfazowego SM jednobiegunowego syme-
trycznego z globalnym układem ochrony przepięciowej (UOT) oraz oscylogra-
my napięć i prądów uzyskane w tym układzie pokazano na rysunkach 2.19 –
2.21 [16], [27], [119], [120], [123], [126].
2.2. Układy matrycowe 25
t
t
t
t
t
s
1
(t)
u
S1
u
2
u
L1
i
L1
T/2
T
T
S
t
2
t
1
t
u
NL
s
2
(t)
u
S2
u
S3
i
L2
i
L3
t
i
S1
t
u
3
a)
t
t
t
t
t
s
1
(t)-s
5
(t)
i
S1
u
L1
i
L1
T/2
T
T
S
t
2
t
1
u
S1
u
S2
u
S3
i
L2
i
L3
b)
Rys. 2.18. Przebiegi czasowe napięć i prądów w trójfazowym układzie z SM,
a) jednobiegunowym niesymetrycznym (rys. 2.16b) dla współczynnika wypeł-
nienia impulsu D = 0,6, b) dwubiegunowym symetrycznym (rys. 2.17) dla D = 0,2
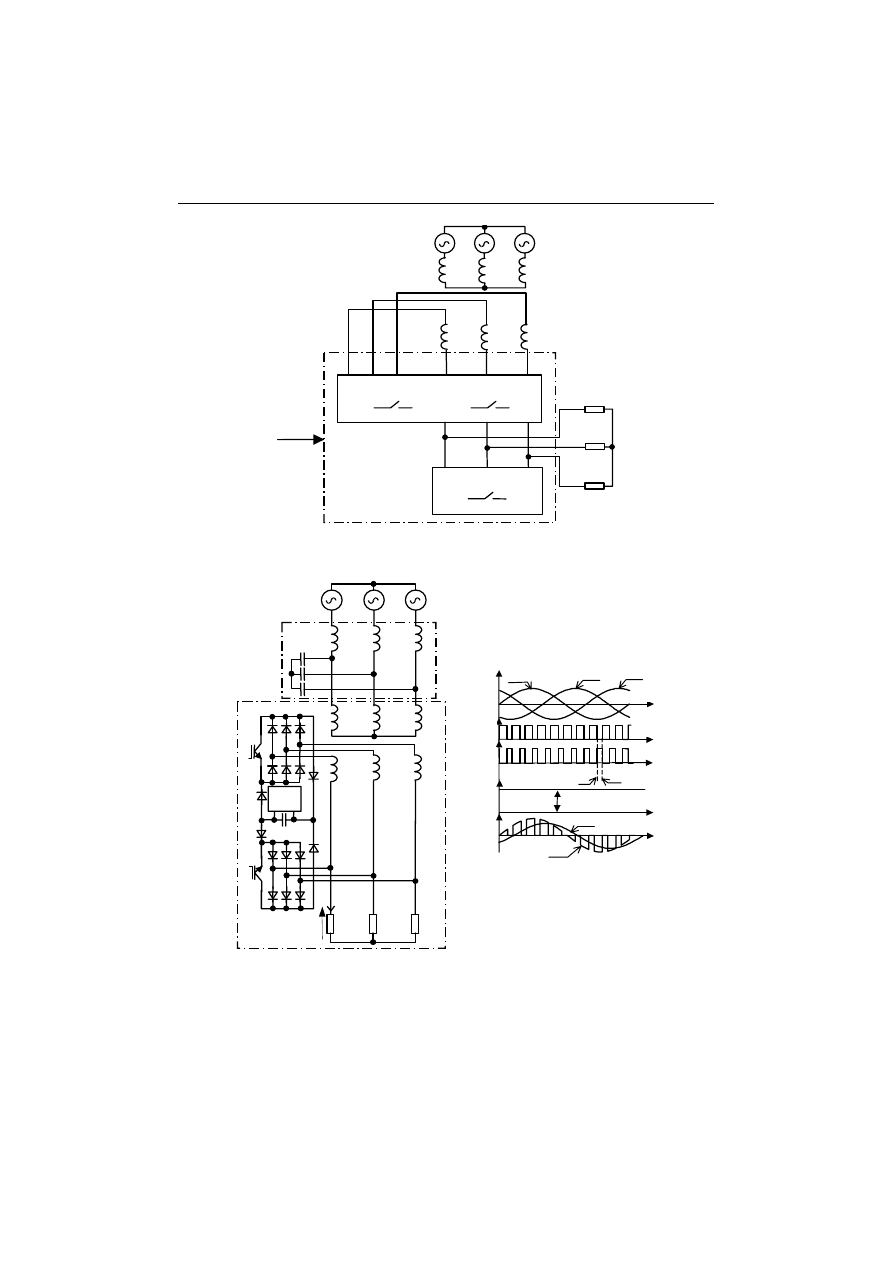
Przykład realizacji układowej trójfazowego SM jednobiegunowego
z regeneracyjnym układem ochrony przepięciowej pokazano na rys. 2.22 [19],
[91]. W tym układzie jest realizowana ochrona przepięciowa z odzyskiwaniem
energii elektrycznej gromadzonej w kondensatorach C
S
i C
F
podczas komutacji.
Taki sposób ochrony przepięciowej był już przedstawiony wcześniej podczas
omawiania układu pokazanego na rys. 2.8. Omawiany układ wymaga formowa-
nia sygnałów sterujących łączniki, zależnie od polaryzacji międzyfazowych
napięć zasilania (rys. 2.22b).
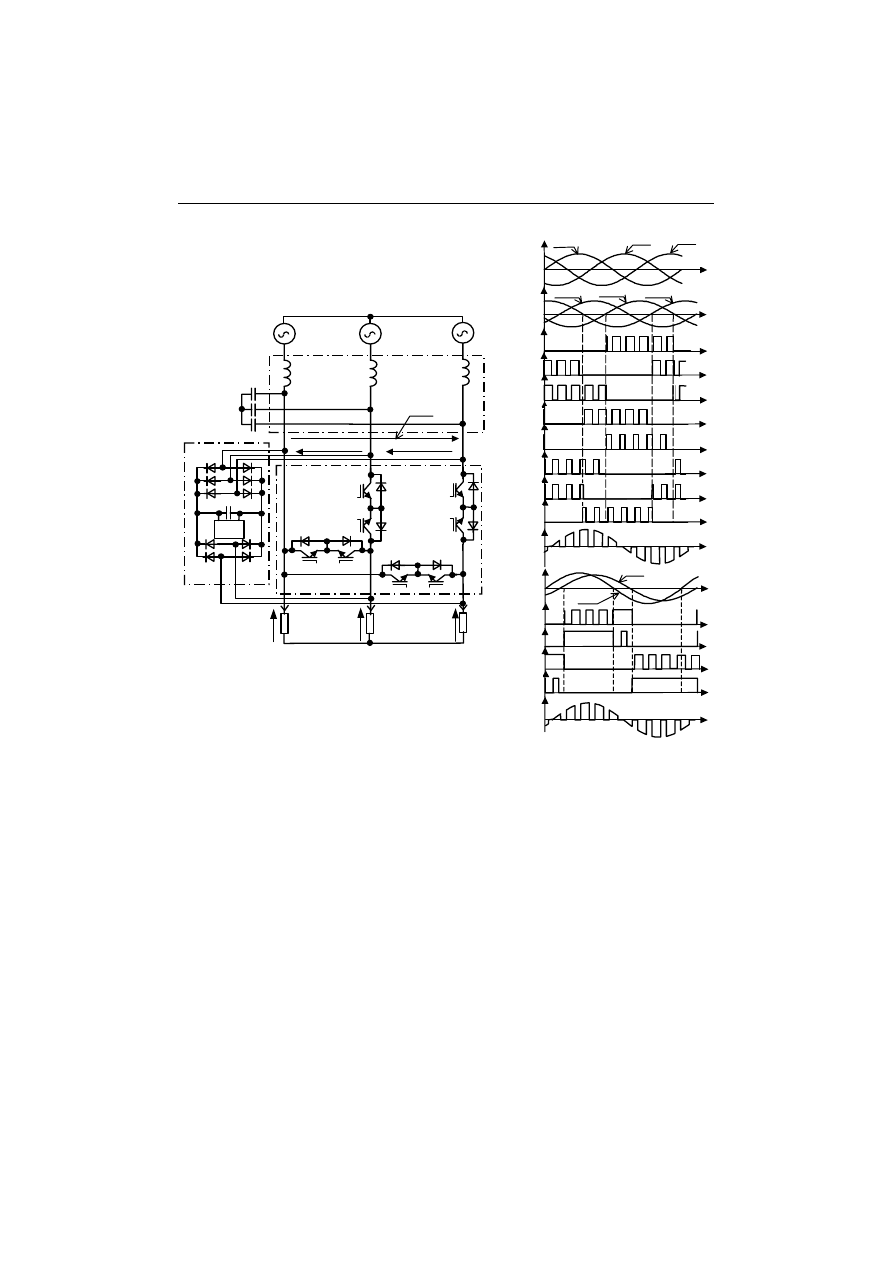
Realizację układową trójfazowego SM niesymetrycznego jednobiegunowe-
go pokazano na rys. 2.23. W tym układzie w wersji sterowania typu PWM bez
“czasu martwego” (rys. 2.23c) liczba komutacji jest ok. 2-krotnie mniejsza niż
przy najprostszym sterowaniu typu PWM z “czasem martwym” [23], [27],
[118], [122], [125].
26 2. Topologie
u
S1
i
S1
Z
L1
u
L1
T
1
i
L1
SM
a)
L
F1
C
F1
u
S2
u
S3
T
4
T
2
T
5
T
3
T
6
OA
C
S
UOT
t
t
t
t
u
L1
u
S1
i
L1
b)
s
T1,2,3
(t)
t
δ
t
δ
i
S2
i
S3
Z
L2
Z
L3
s
T4,5,6
(t)
u
S2
u
S3
t
u
CS
2U
max
u
i
u
i
Rys. 2.19. Układ z SM symetrycznym jednobiegunowym o topologii z 3+3 łącznikami
typu tranzystor-dioda, a) schemat ideowy, b) charakterystyczne przebiegi czasowe;
UOT – układ obejściowo-tłumiący, OA – obciążenie aktywne, t
δ
- “czas martwy”
a)
u
S 3
i
S 3
3 A
b)
u
L 2
i
L3
3 A
c)
0
4
8
1 2
1 6
2 0
P rą d fa z o w y ź r ó d ła
1 ,6
1 ,2
0 ,8
0 ,4
0
f
[k H z ]
{ i
S 3
} [ A ]
d)
N ap ięcie faz o w e o b ciąż en ia
1 5 0
1 0 0
5 0
0
{ u
L 2
} [V ]
0
4
8
1 2
1 6 2 0
f
[k H z]
Rys. 2.20. Oscylogramy w układzie z rys. 2.19 bez filtru wejściowego dla f
S
= 2 kHz,
D = 0,6, I
Lmax
= 4,5 A (cosφ
L
= 0,85), a) napięcia i prądu fazowego źródła, b) napięcia
i prądu fazowego obciążenia, c), d) widma prądu fazowego źródła oraz napięcia fazo-
wego obciążenia
2.2. Układy matrycowe 27
8
i
L1
[A]
D = 1
t
4
0
-4
-8
u
S1
D = 0,8
D = 0,6
D = 0,4
D = 0,2
Rys. 2.21. Zestawienie oscylogramów prądu obciążenia uzyskanych w układzie poka-
zanym na rys. 2.19 dla f
S
= 2 kHz, I
Lmax
= 4,5 A (cosφ
L
= 0,85)
u
S1
i
S1
Z
L1
u
L1
T
1
i
L1
SM
a)
L
F1
C
F1
u
S2
u
S3
T
4
T
2
T
5
T
3
T
6
C
S1
t
t
t
t
u
L1
b)
s
T1
(t)
t
δ
t
δ
i
S2
i
S3
Z
L2
Z
L3
s
T4
(t)
C
S2
C
S3
u
I12
i
L1
u
I23
u
I31
u
i
u
I12
u
I23
u
I31
t
t
s
T3
(t)
s
T6
(t)
t
t
s
T2
(t)
s
T5
(t)
t
u
u
CS2
u
CS1
u
CS3
u
i
Rys. 2.22. Układ z SM symetrycznym jednobiegunowym o topologii z 3+3 łącznikami
typu tranzystor-dioda oraz regeneracyjnym układem ochrony przepięciowej (C
S1
, C
S2
,
C
S3
), a) schemat ideowy, b) charakterystyczne przebiegi czasowe; t
δ
- “czas martwy”
W układach trójfazowych z SM są stosowane wejściowe oraz wyjściowe
filtry pasywne LC, podobnie jak w układach jednofazowych, które omawiano
wcześniej.
28 2. Topologie
u
S1
i
S1
Z
L1
u
L1
T
1
i
L1
SM
a)
L
F1
C
F1
u
S2
u
S3
T
4
T
2
T
5
T
3
T
7
C
S
t
t
t
t
u
L1
b)
s
T5
(t)
i
S2
i
S3
Z
L2
Z
L3
s
T6
(t)
u
I12
u
I23
u
I31
u
i
u
I12
u
I23
u
I31
t
t
s
T3
(t)
s
T4
(t)
t
t
s
T1
(t)
s
T2
(t)
t
i
L2
i
L1
i
L3
OA
T
6
T
8
UOT
s
T7
(t)
s
T2
(t)
s
T4
(t)
t
t
t
t
u
L3
u
I31
i
L3
c)
t
t
t
s
T7
(t)
t
s
T8
(t)
i
L2
i
L3
u
L2
u
L3
s
T8
(t)
Rys. 2.23. Układ z SM niesymetrycznym jednobiegunowym o topologii z 2+2 łączni-
kami typu dwa tranzystory-dwie diody, a) schemat ideowy, b) charakterystyczne prze-
biegi czasowe przy sterowaniu bez “czasu martwego” z identyfikacją prądów obciąże-
nia i
L2
, i
L3
, c) przykładowe przebiegi czasowe (dla jednej fazy) przy sterowaniu bez
“czasu martwego” z identyfikacją prądów obciążenia i
L2
, i
L3
, oraz napięć u
I31
, u
I12
2.2.2. Sterowniki matrycowe izolowane
Sterowniki matrycowe izolowane dzielą się na dwie podstawowe grupy: SM
izolowane o sterowaniu typu PWM oraz SM izolowane o sterowaniu typu
PWM z przesunięciem fazowym (rys. 2.3). W pierwszej grupie topologie SM
izolowanych są budowane przez kaskadowe połączenie transformatora z SM.
W drugiej grupie, w której wykorzystuje się dwa SM dwubiegunowe, topologie
SM izolowanych są budowane przez przyłączenie jednego z SM po stronie
pierwotnej, a drugiego SM po stronie wtórnej transformatora.
2.2. Układy matrycowe 29
Jak już o tym wspomniano w podrozdziale 1.2, w transformatorach stoso-
wanych w SM izolowanych należących do grupy pierwszej, częstotliwość har-
monicznej podstawowej strumienia magnetycznego w rdzeniu transformatora
jest taka sama jak częstotliwość napięcia zasilania (50 lub 60
Hz).
W transformatorach stosowanych w SM izolowanych należących do grupy dru-
giej nie występuje harmoniczna o wartości częstotliwości odpowiadającej czę-
stotliwości harmonicznej podstawowej napięcia zasilania. W tych układach
występuje wysokoczęstotliwościowe transformowanie energii elektrycznej
przez transformator [27], [60], [71] – [74], [76].
Topologie jednofazowe SM izolowanych jednobiegunowych o sterowaniu
PWM są budowane przez kaskadowe połączenie transformatora z SM od strony
źródła zasilania albo od strony obciążenia. O sposobie połączenia decydują
zwykle parametry transformatora (przekładnia napięciowa) oraz kryteria kon-
strukcyjno-ekonomiczne (zdolność obciążeniowa łączników półprzewodniko-
wych oraz ich koszt). Zwykle SM jest umieszczany po tej stronie transformato-
ra, po której występują mniejsze prądy. Topologie trójfazowych SM izolowa-
nych jednobiegunowych o sterowaniu PWM są budowane przez połączenie
transformatora trójfazowego pokazane na rysunkach 2.24 oraz 2.25. Połączenie
pokazane na rys. 2.25 jest stosowane w układach wymagających dostępu do
zacisku wspólnego trójfazowego źródła zasilania, np. topologia pokazana na
rys.2.14f. Jak już o tym wspomniano wcześniej (podrozdz. 2.2.1), SM izolowa-
ne dwubiegunowe są stosowane w stabilizatorach napięcia przemiennego
i transformator jest w nich połączony z zaciskami wyjściowymi SM.
u
S1
Z
L2
u
S2
u
S3
A
1
B
1
C
1
A
0
B
0
C
0
Z
L3
Z
L1
ŁĄCZNIKI ŹRÓDŁA
ŁĄCZNIKI OBC.
SM
jak na rysunkach
2.12 – 2.15
LUB
D
A
2
B
2
C
2
TR
Rys. 2.24. Układy trójfazowe z SM jednobiegunowym izolowanym od strony obc.
Przykład realizacji układowej trójfazowego SM jednobiegunowego izolo-
wanego od strony źródła oraz oscylogramy prądów w tym układzie pokazano na
rysunkach 2.26 oraz 2.27 [16], [27], [147].
30 2. Topologie
u
S1
Z
L2
u
S2
u
S3
A
1
B
1
C
1
A
0
B
0
C
0
Z
L3
Z
L1
ŁĄCZNIKI ŹRÓDŁA
ŁĄCZNIKI OBC.
SM
jak na rysunkach
2.9 – 2.12
LUB
D
A
2
B
2
C
2
TR
Rys. 2.25. Układy trójfazowe z SM jednobiegunowym izolowanym od strony źródła
u
S1
i
S1
Z
L1
u
L1
T
1
i
L1
SM
a)
L
F1
C
F1
u
S2
u
S3
T
2
OA
C
T
t
t
t
t
u
L1
u
S1
i
L1
b)
s
T1
(t)
t
δ
t
δ
i
S2
i
S3
Z
L2
Z
L3
s
T2
(t)
u
S2
u
S3
t
u
CT
>U
max
u
i
u
i
TR
Rys. 2.26. Układ z SM jednobiegunowym izolowanym z 1 + 1 łącznikami typu tranzy-
stor-trójfazowy mostek diodowy, a) schemat ideowy, b) charakterystyczne przebiegi
czasowe; TR – transformator, C
T
– kondensator obejściowo-tłumiący, OA – obciążenie
aktywne, t
δ
- “czas martwy” (rys. 1.2b)
2.2. Układy matrycowe 31
a)
b)
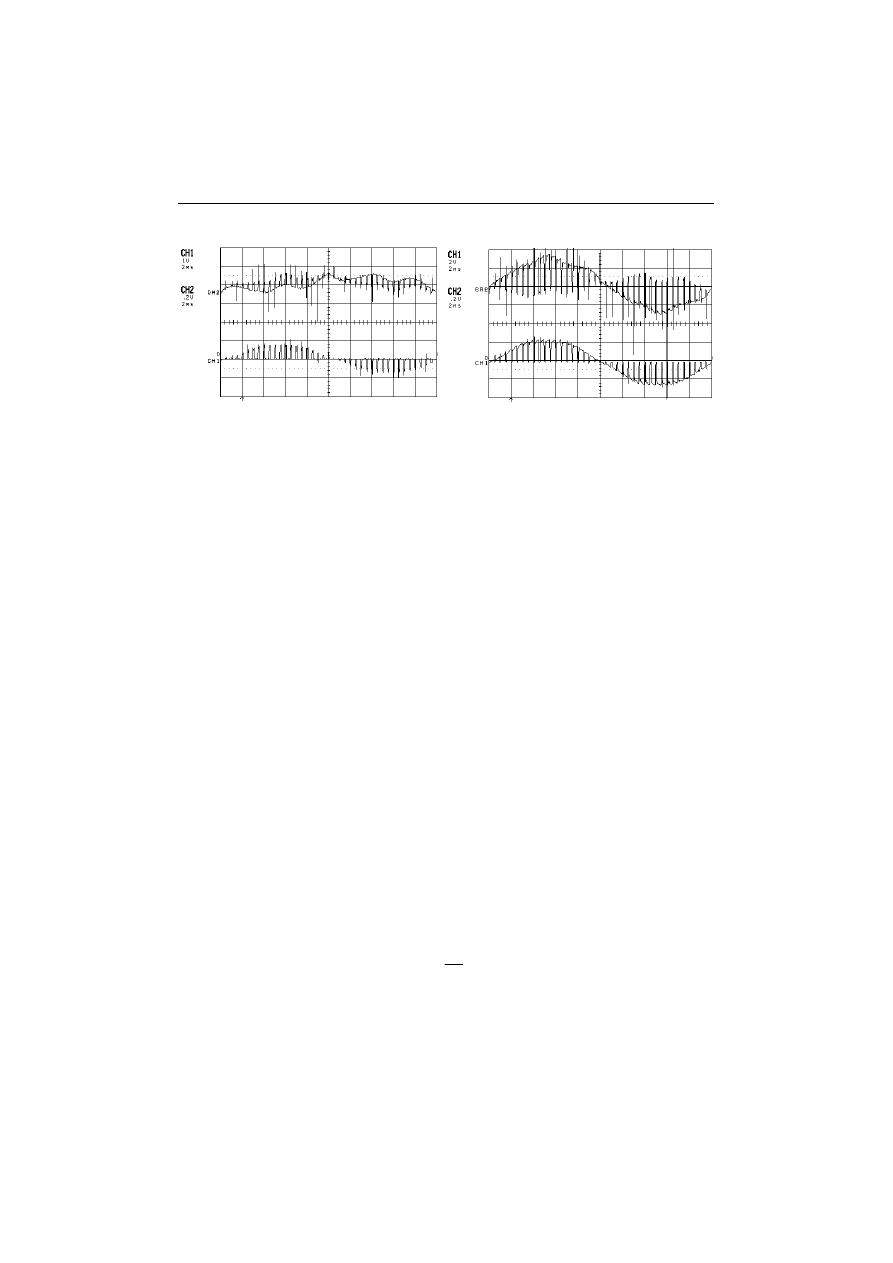
Rys. 2.27. Oscylogramy prądów w układzie pokazanym na rys. 2.26, a) dla D = 0,2,
b) dla D = 0,8; CH1 - prąd po stronie pierwotnej TR, CH2 – prąd po stronie wtórnej TR
Przebiegi czasowe pokazane na rys. 2.27 pośrednio ilustrują, że wartość
częstotliwości harmonicznej podstawowej prądów oraz strumienia w rdzeniu
transformatora TR jest taka sama jak częstotliwość napięcia zasilającego. Przy-
kład realizacji układowej trójfazowego SM dwubiegunowego izolowanego po-
kazano na rys. 2.28 [27], [51], [52]. Jest to jednocześnie przykład typowej reali-
zacji układowej stabilizatora napięcia przemiennego, w którym zastosowano
omawiane rozwiązanie SM.
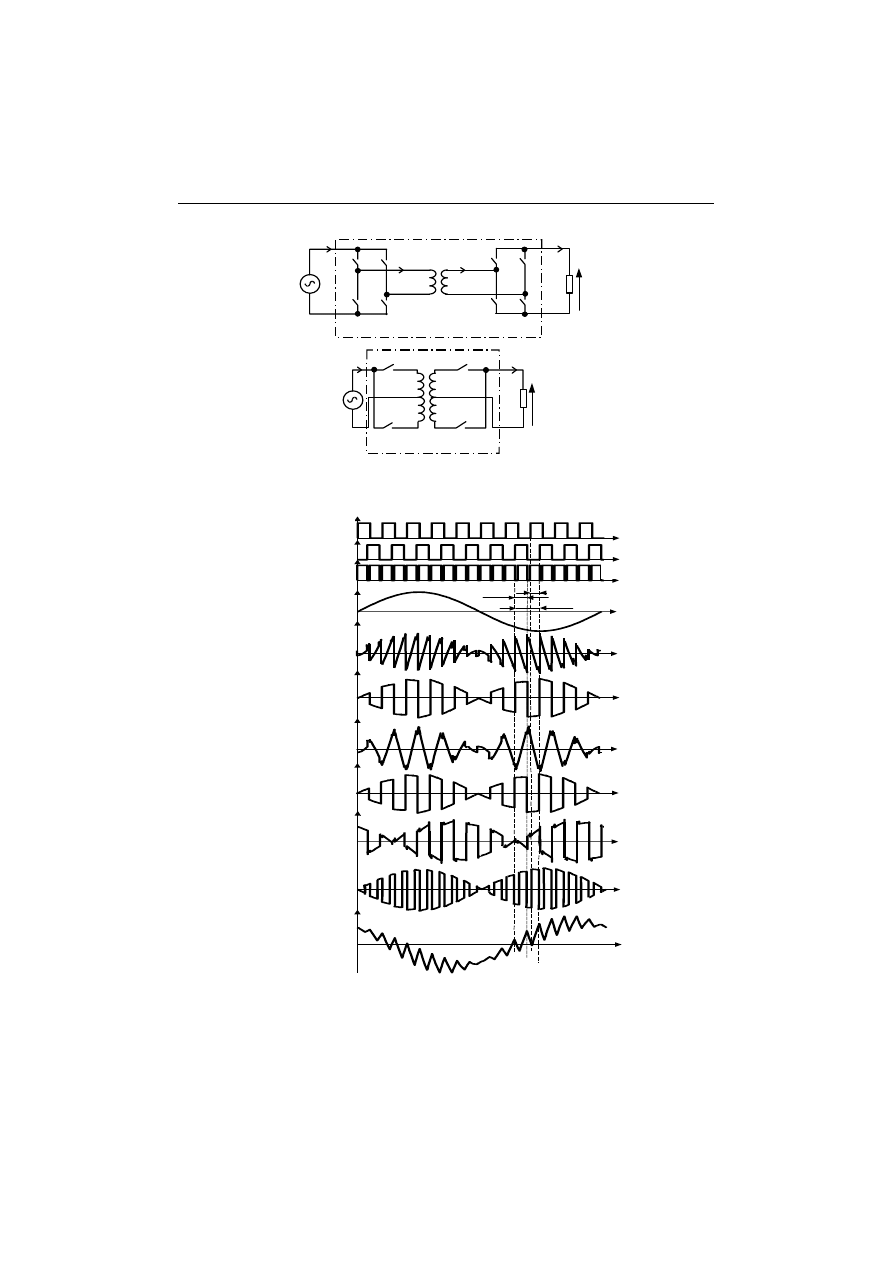
Schematy zastępcze układów z SM izolowanymi o sterowaniu typu PWM
z przesunięciem fazowym, które należą do drugiej grupy SM izolowanych, po-
kazano na rys. 2.29. Są to schematy zastępcze z modelami obwodowymi SM
z łącznikami idealnymi (podrozdz.1.4, p.1)) [60]. Układ w wersji pierwszej
z 4 + 4 łącznikami (rys. 2.29a) ma transformator TR dwuuzwojeniowy oraz
dwie struktury SM dwubiegunowych. Jedną złożoną z łączników S
1
– S
4
po
stronie pierwotnej transformatora TR i drugą składającą się z łączników S
5
– S
8
po stronie wtórnej tego transformatora. Układ w wersji drugiej z 2 + 2 łączni-
kami (rys. 2.29b) ma transformator TR czterouzwojeniowy oraz dwie struktury
SM dwubiegunowych o zredukowanej liczbie łączników. Dwa łączniki S
1
, S
2
po stronie pierwotnej i dwa łączniki S
3
, S
4
po stronie wtórnej transformatora
TR. W tych układach jest stosowane sterowanie, w którym wykorzystuje się
przesunięcie fazowe pomiędzy sygnałami sterującymi łączniki po stronie pier-
wotnej względem sygnałów sterujących po stronie wtórnej transformatora TR
(rys. 1.3). Wielkością sterującą jest wartość współczynnika przesunięcia fazo-
wego przebiegów czasowych sygnałów sterujących po stronie pierwotnej
względem sygnałów po stronie wtórnej transformatora:
θ
α
T
t
D
=
, (2.1)
gdzie:
T
θ
=
T
S
/2 – okres przełączania napięcia wyjściowego.
32 2. Topologie
Sterowanie typu PWM z przesunięciem fazowym daje efekt w postaci wy-
eliminowania harmonicznej podstawowej strumienia magnetycznego w rdzeniu
transformatora o częstotliwości napięcia zasilającego (50 lub 60 Hz). Działanie
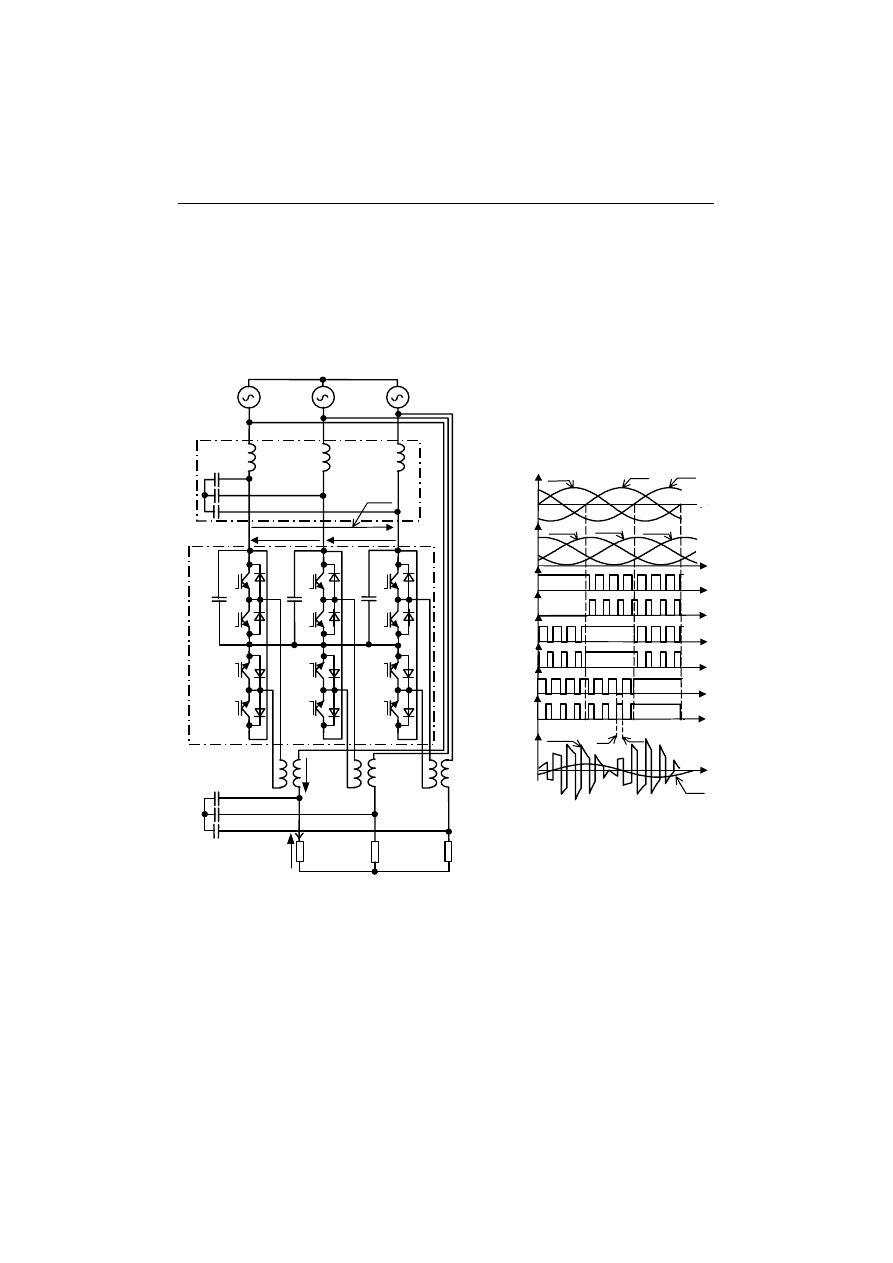
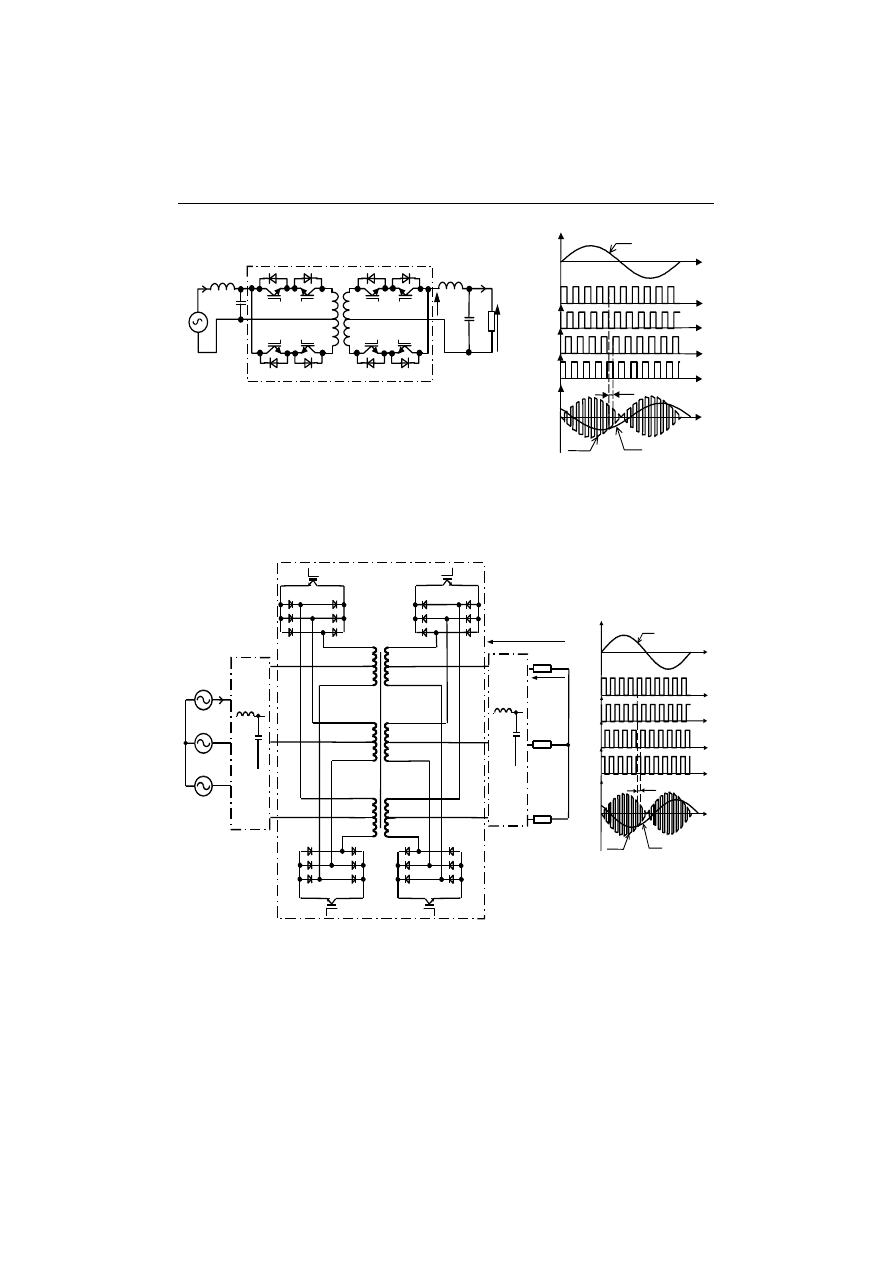
omawianego układu ilustrują przebiegi czasowe pokazane na rys. 2.30. Przy-
kłady realizacji układowych SM dwubiegunowych izolowanych o sterowaniu
PWM z przesunięciem fazowym pokazano na rysunkach 2.31 oraz 2.32 [27],
[60], [71] – [74], [128], [129].
u
S1
i
S1
Z
L1
u
L1
T
1
i
L1
a)
L
F1
C
F1
u
S2
u
S3
T
4
T
2
T
5
T
3
T
6
C
S1
t
t
t
t
u
O1
b)
s
T1, 10
(t)
t
δ
t
δ
i
S2
i
S3
Z
L2
Z
L3
s
T4, 7
(t)
C
S2
C
S3
u
I12
i
L1
u
I23
u
I31
u
i
u
I12
u
I23
u
I31
t
t
s
T3, 12
(t)
s
T6, 9
(t)
t
t
s
T2, 11
(t)
s
T5, 8
(t)
t
u
u
CS2
u
CS1
u
CS3
u
i
T
7
SM
T
10
T
8
T
11
T
9
T
12
C
F2
TR
u
O1
Rys. 2.28. Układ trójfazowy (stabilizator napięcia przemiennego) z SM dwubieguno-
wym izolowanym z regeneracyjnym układem ochrony przepięciowej, a) schemat ide-
owy, b) charakterystyczne przebiegi czasowe; t
δ
- “czas martwy” (rys. 1.2b)
2.2. Układy matrycowe 33
u
S
i
S
Z
L
u
L
S
2
S
1
i
L
S
3
S
4
SM
S
6
S
5
S
7
S
8
a)
b)
TR
u
S
i
S
Z
L
u
L
S
2
S
1
i
L
S
3
S
4
SM
TR
p:1
p:1
u
1
u
2
i
1
i
2
Rys. 2.29. Układy jednofazowe z SM dwubiegunowymi izolowanymi o sterowaniu typu
PWM z przesunięciem fazowym, a) z 4 + 4 łącznikami, b) z 2 + 2 łącznikami
t
t
t
t
t
u
S
i
S
u
L
i
L
T / 2
T
T
S
t
D
s
1
( t ) , s
4
( t )
t
t
u
1
t
i
1
t
u
2
t
i
2
T
θ
s
5
( t ) , s
8
( t )
t
s ( t )
Rys. 2.30. Przebiegi czasowe napięć i prądów w jednofazowym układzie z SM dwubie-
gunowym izolowanym o sterowaniu PWM z przesunięciem fazowym (rys. 2.29a) dla
α = 0,8 oraz przekładni napięciowej transformatora p = 1
34 2. Topologie
a)
u
S
i
S
Z
L
u
L
T
2
T
1
i
L
SM
TR
p:1
T
4
T
3
L
F
C
F
T
6
T
5
T
8
T
7
C
F
t
t
u
O
b)
u
s
u
t
t
s
T5, 7
(t)
s
T6, 8
(t)
t
t
s
T1, 3
(t)
s
T2, 4
(t)
u
i
L
F
u
O
t
D
i
L
Rys. 2.31. Układ z SM dwubiegunowym izolowanym z 2 + 2 łącznikami o sterowaniu
typu PWM z przesunięciem fazowym (z ang. “intelligent transformer”, [60]),
a) schemat ideowy, b) charakterystyczne przebiegi czasowe; t
D
– czas opóźnie-
nia (rys. 1.3)
FILTR
WEJ.
TR
.
.
.
.
.
.
.
.
.
.
.
.
u
S1
i
S1
Z
L1
T
1
SM
p:1
u
O
T
3
T
2
T
4
FILTR
WYJ.
Z
L2
Z
L3
u
L
u
S2
u
S3
a)
t
t
u
O
b) u
t
t
s
T3
(t)
s
T4
(t)
t
t
s
T1
(t)
s
T2
(t)
u
i
t
D
i
L
u
s
Rys. 2.32. Układ z SM dwubiegunowym izolowanym z 2 + 2 łącznikami o sterowaniu
typu PWM z przesunięciem fazowym, a) schemat ideowy, b) charakterystyczne prze-
biegi czasowe; t
D
– czas opóźnienia (rys. 1.3)
Wyszukiwarka
Podobne podstrony:
Burszta Antropologia kultury rozdz spotkanie z innością s 13 34
Adrian Mole lat 13 i 34 Sekretny dziennik Sue Townsend
Lista 13 rozdzial 34 EN
F2 34 Układy CMOS 13 Bramki transmisyjne
PRAKTYKA wrzesień 2005, 2P 34 KOSZYKÓWKA IVa 13, Konspekt lekcji piłki ręcznej dla kl
Lista 13, rozdzial 34 EN
Lista 13 rozdzial 34 EN
34 13
akumulator do opel kadett e hatchback 33 34 43 44 12 12i 13 n
Św Augustyn Wyznania (tłum i wstęp Z Kubiak) Księga X 1 23, XI 1 20, 28 31, XII 1 13, XIII 1 11, 2
13 ZMIANY WSTECZNE (2)id 14517 ppt
13 zakrzepowo zatorowa
Zatrucia 13
więcej podobnych podstron