Płaskie układy obciążeń, redukcja i równowaga.
mechanika techniczna | statyka
2
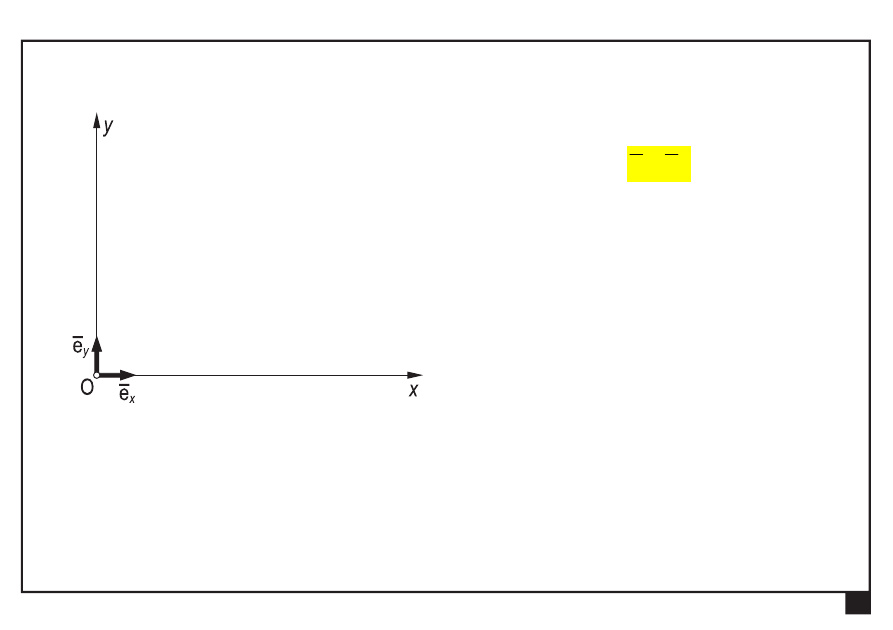
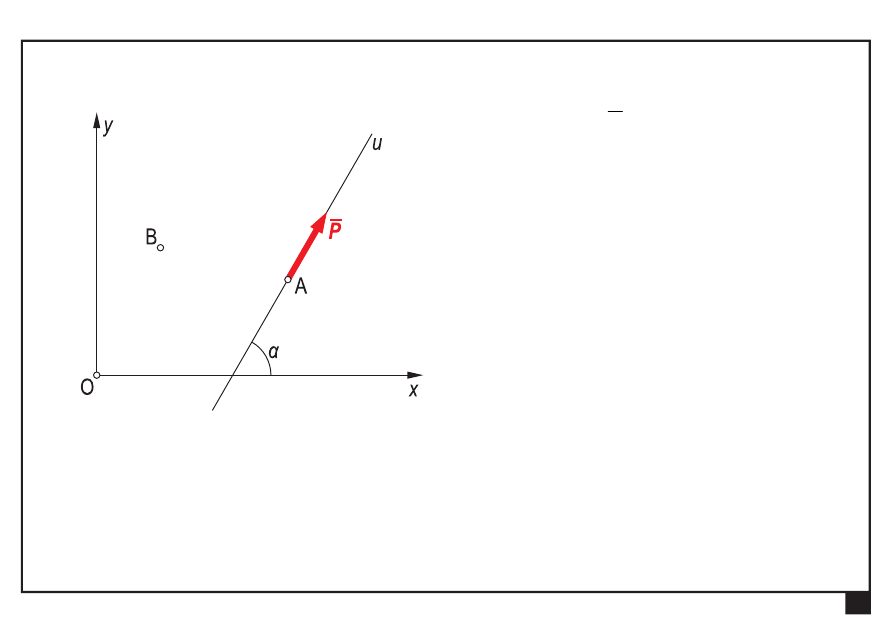
Opis analityczny wielkości podstawowych
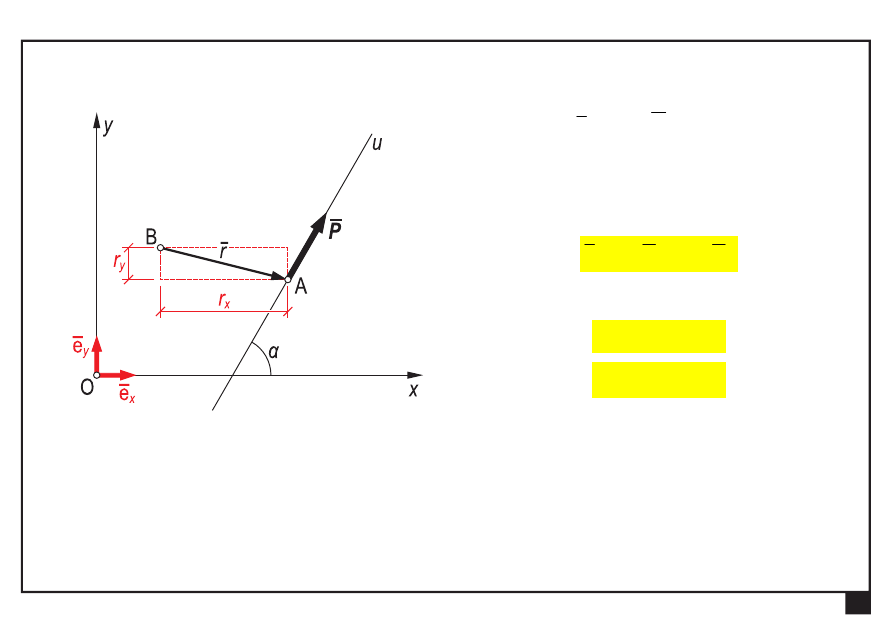
wersory
y
x
e
,
e
Płaskie układy obciążeń, redukcja i równowaga.
mechanika techniczna | statyka
2
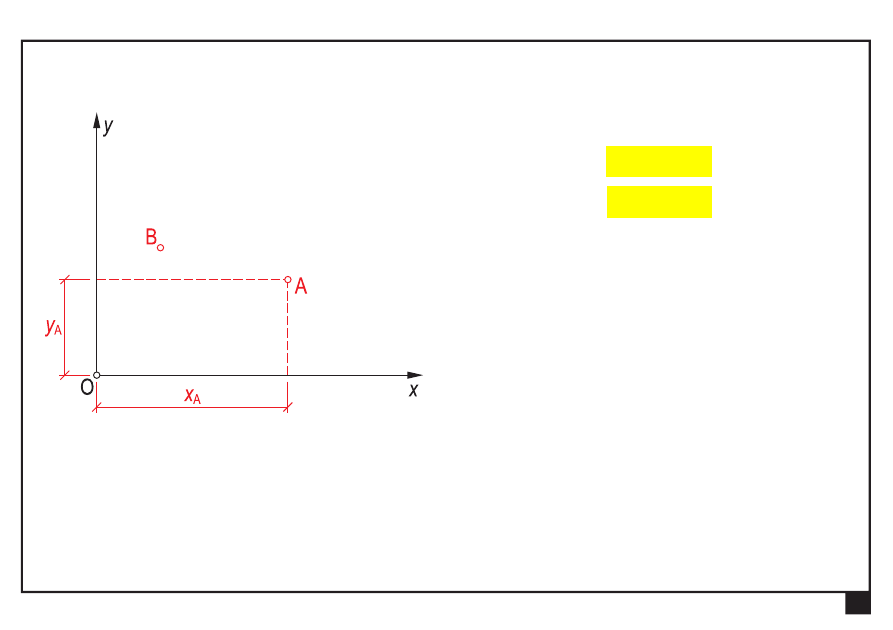
Opis analityczny wielkości podstawowych
współrzędne punktów
)
,
(
A
A
A
y
x
)
,
(
B
B
B
y
x
Płaskie układy obciążeń, redukcja i równowaga.
mechanika techniczna | statyka
2
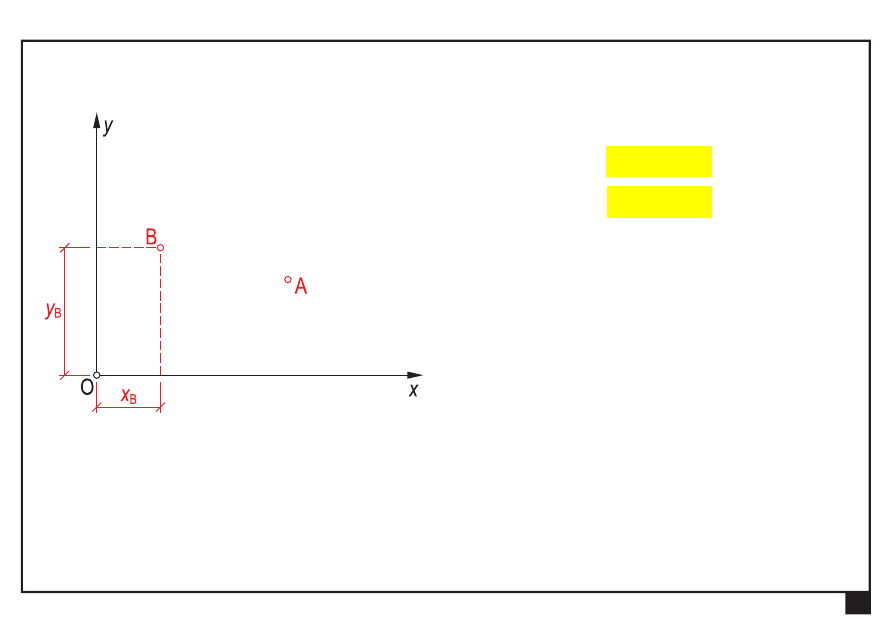
Opis analityczny wielkości podstawowych
współrzędne punktów
)
,
(
A
A
A
y
x
)
,
(
B
B
B
y
x
Płaskie układy obciążeń, redukcja i równowaga.
mechanika techniczna | statyka
2
Opis analityczny wielkości podstawowych
Płaskie układy obciążeń, redukcja i równowaga.
mechanika techniczna | statyka
2
Opis analityczny wielkości podstawowych
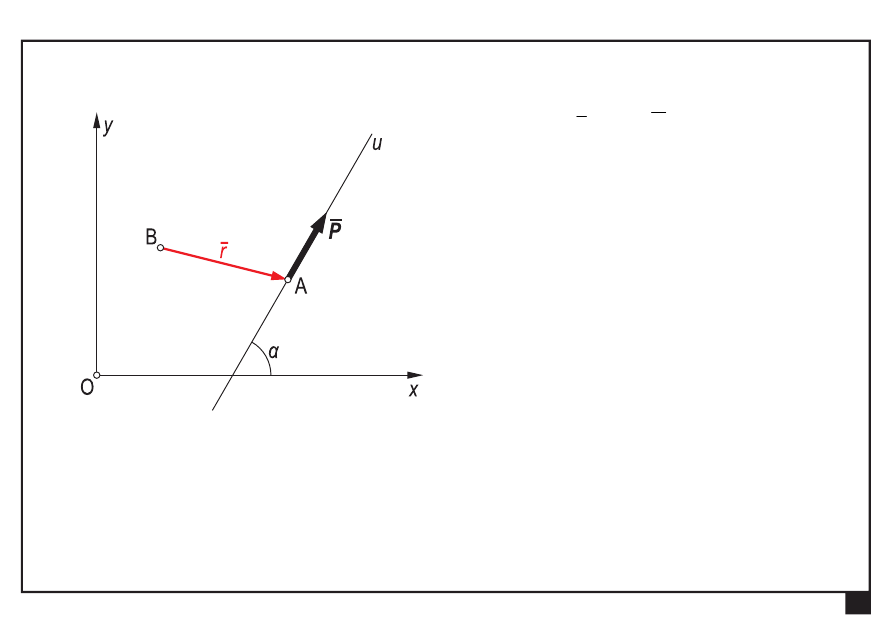
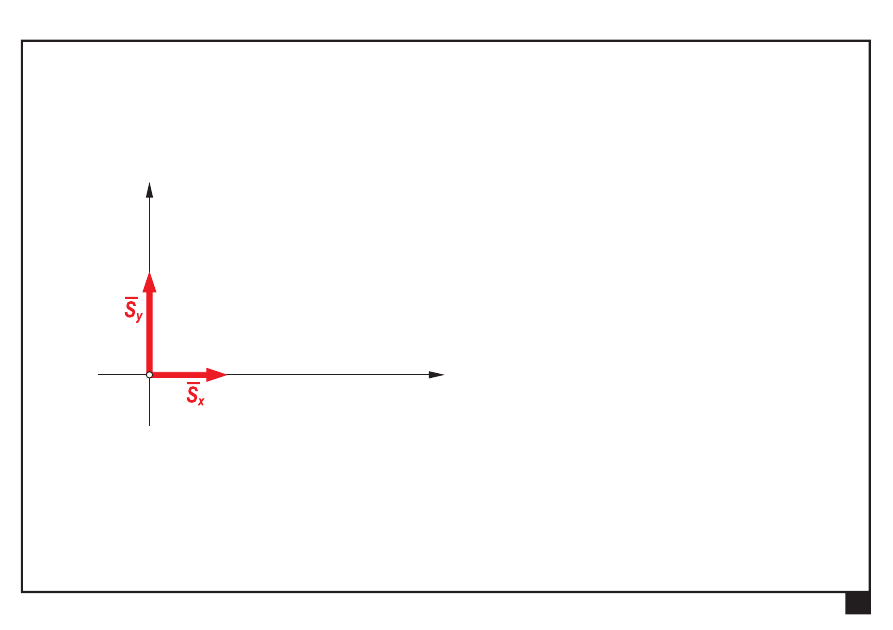
wektor siły
P
Płaskie układy obciążeń, redukcja i równowaga.
mechanika techniczna | statyka
2
Opis analityczny wielkości podstawowych
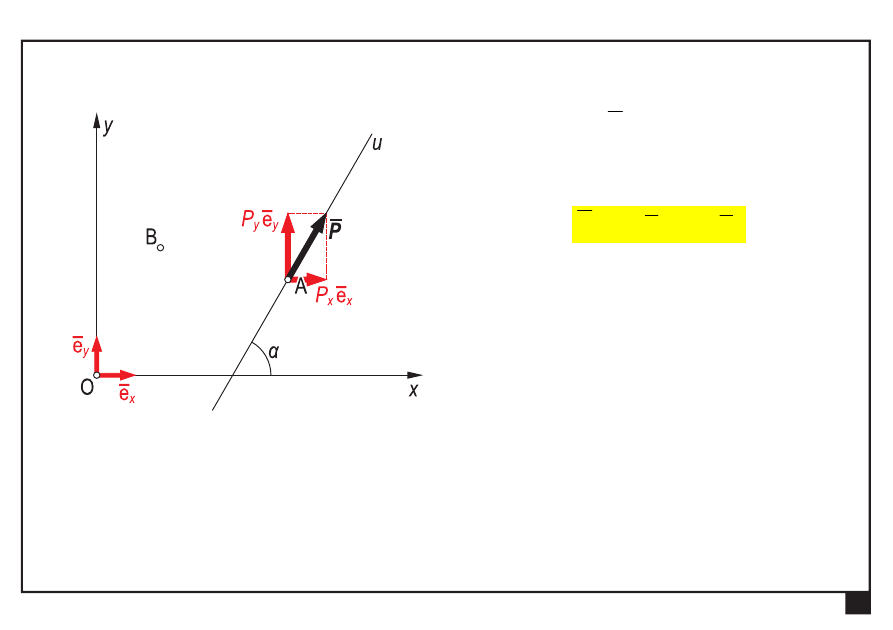
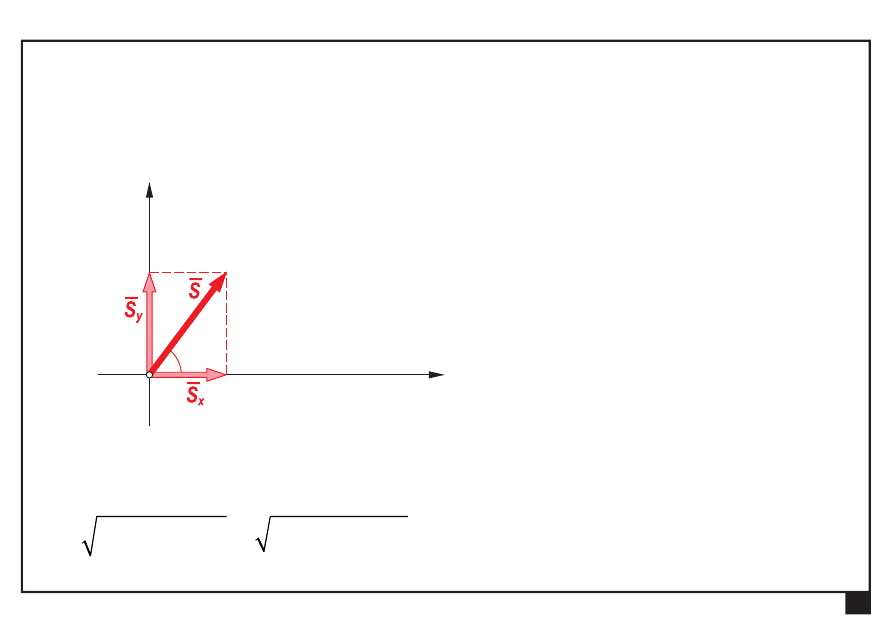
wektor siły
P
— zapis analityczny
y
y
x
x
P
P
P
e
e
+
=
Płaskie układy obciążeń, redukcja i równowaga.
mechanika techniczna | statyka
2
Opis analityczny wielkości podstawowych
wektor siły
P
— zapis analityczny
y
y
x
x
P
P
P
e
e
+
=
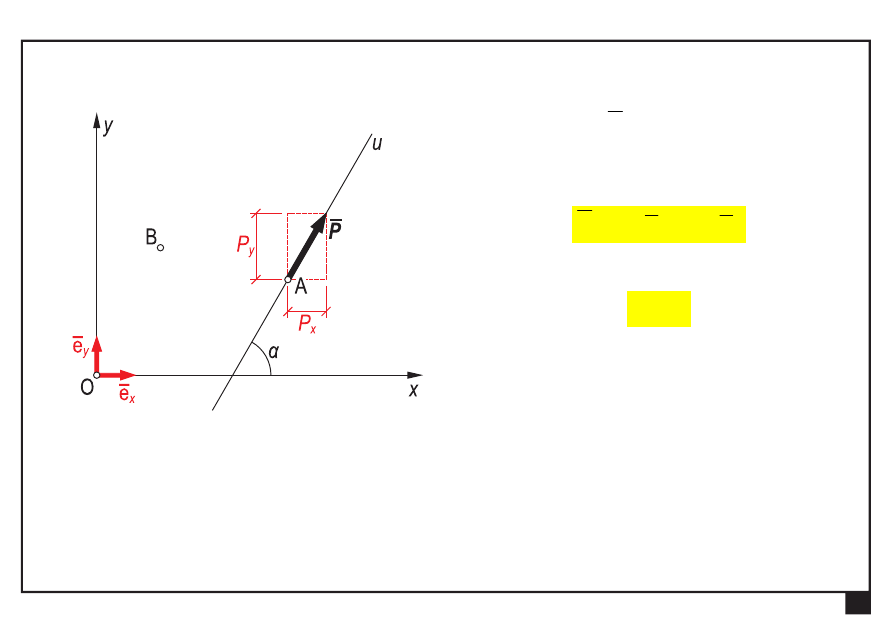
— składowe siły [N]
y
x
P
P ,
Płaskie układy obciążeń, redukcja i równowaga.
mechanika techniczna | statyka
2
Opis analityczny wielkości podstawowych
wektor siły
P
— zapis analityczny
y
y
x
x
P
P
P
e
e
+
=
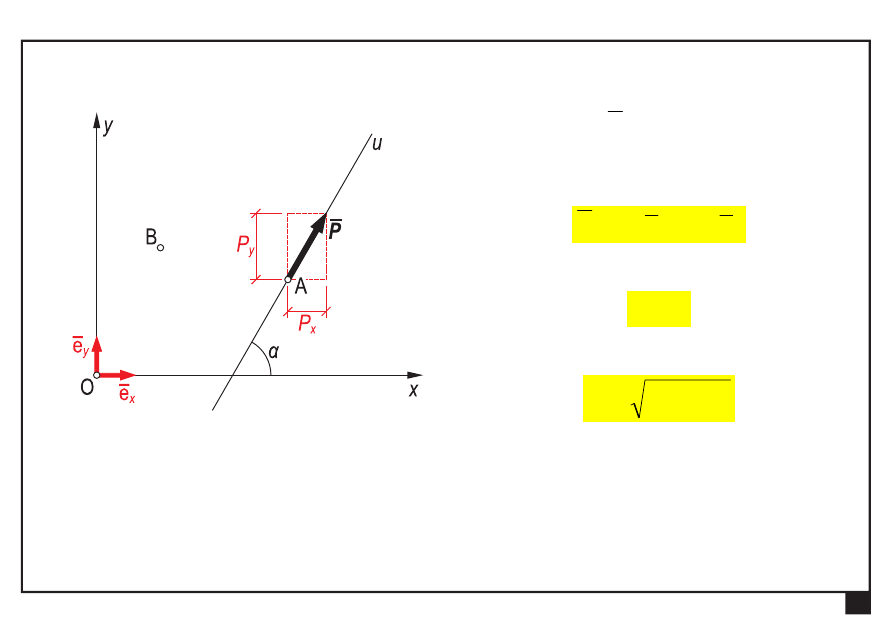
— składowe siły [N]
y
x
P
P ,
— moduł (wartość) siły [N]
2
2
y
x
P
P
P
+
=
Płaskie układy obciążeń, redukcja i równowaga.
mechanika techniczna | statyka
2
Opis analityczny wielkości podstawowych
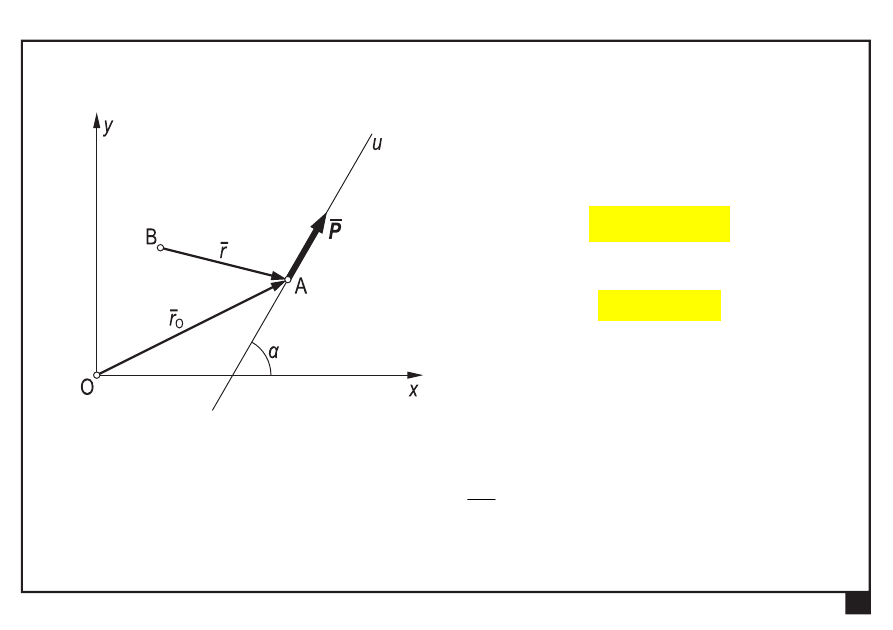
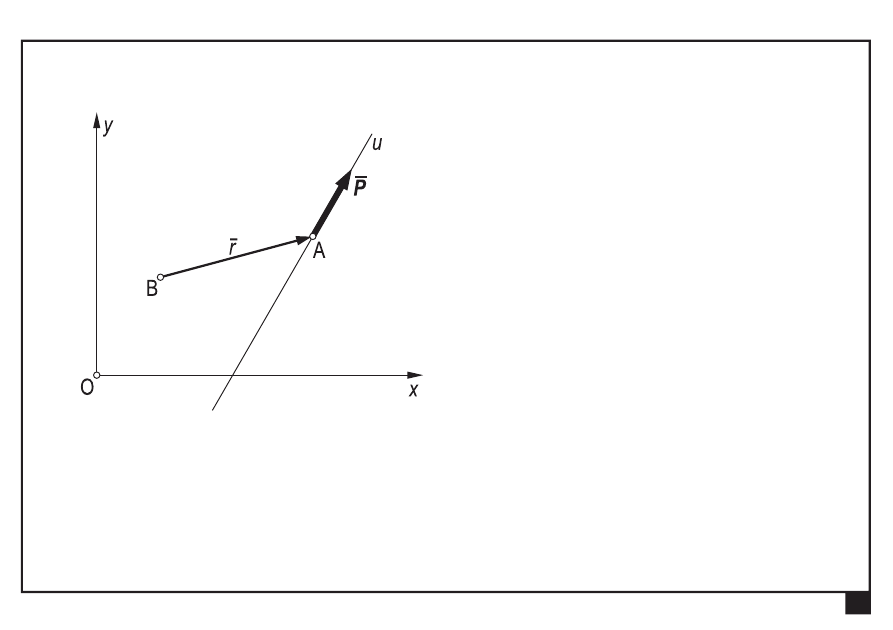
promień
r
siły
P
względem punktu B
Płaskie układy obciążeń, redukcja i równowaga.
mechanika techniczna | statyka
2
Opis analityczny wielkości podstawowych
promień
r
siły
P
względem punktu B
— zapis analityczny
y
y
x
x
r
r
r
e
e
+
=
— składowe promienia [m]
B
A
x
x
r
x
−
=
B
A
y
y
r
y
−
=
Płaskie układy obciążeń, redukcja i równowaga.
mechanika techniczna | statyka
2
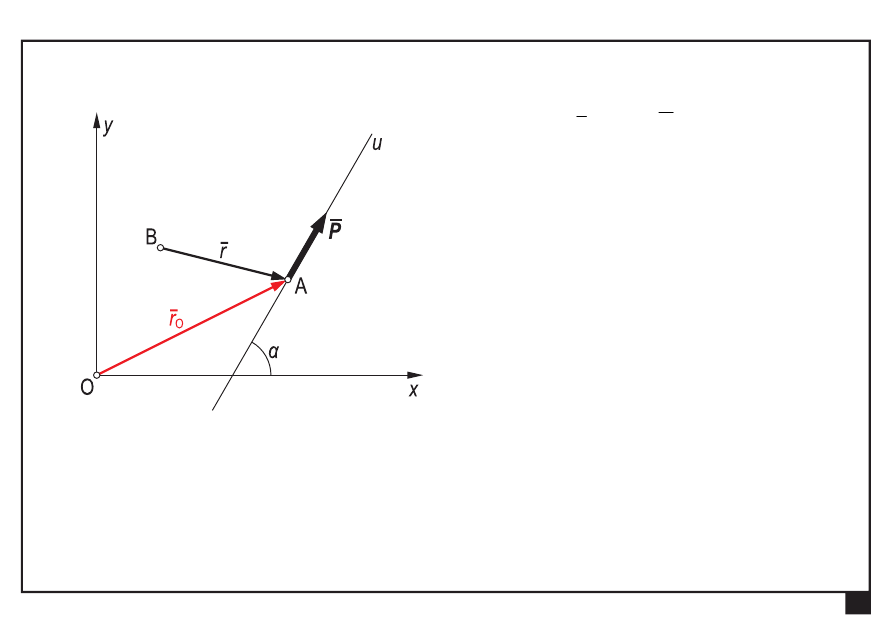
Opis analityczny wielkości podstawowych
promień
O
r siły P
względem punktu O
Płaskie układy obciążeń, redukcja i równowaga.
mechanika techniczna | statyka
2
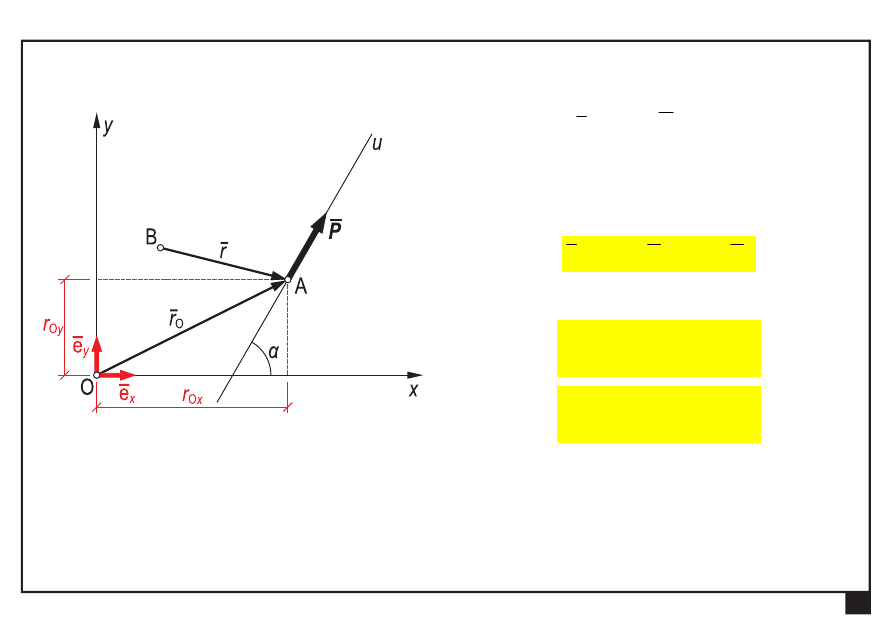
Opis analityczny wielkości podstawowych
promień
O
r siły P
względem punktu O
— zapis analityczny
y
y
x
x
r
r
r
e
e
O
O
O
+
=
— składowe promienia [m]
A
0
O
A
O
x
x
x
r
x
=
−
=
=
A
0
O
A
O
y
y
y
r
y
=
−
=
=
Płaskie układy obciążeń, redukcja i równowaga.
mechanika techniczna | statyka
2
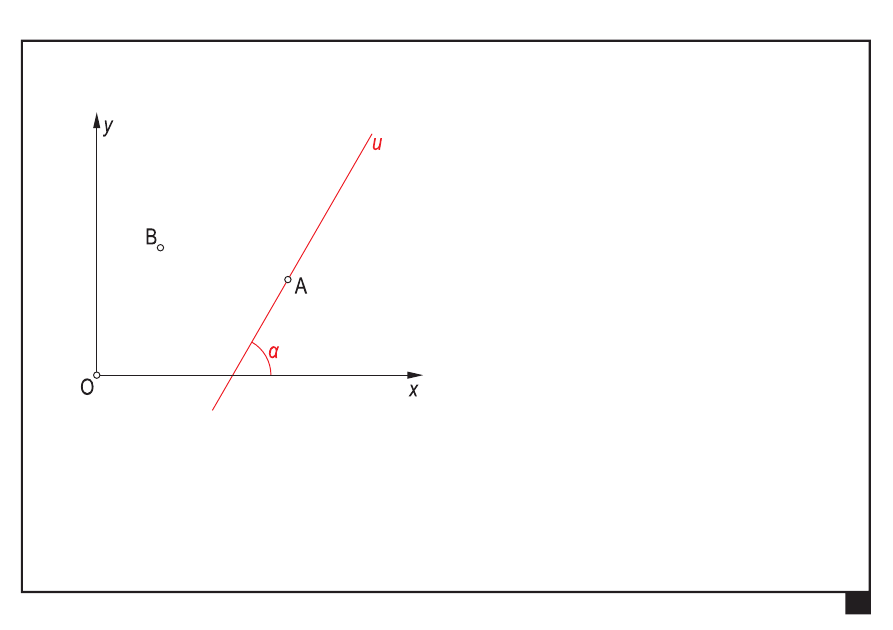
Opis analityczny wielkości podstawowych
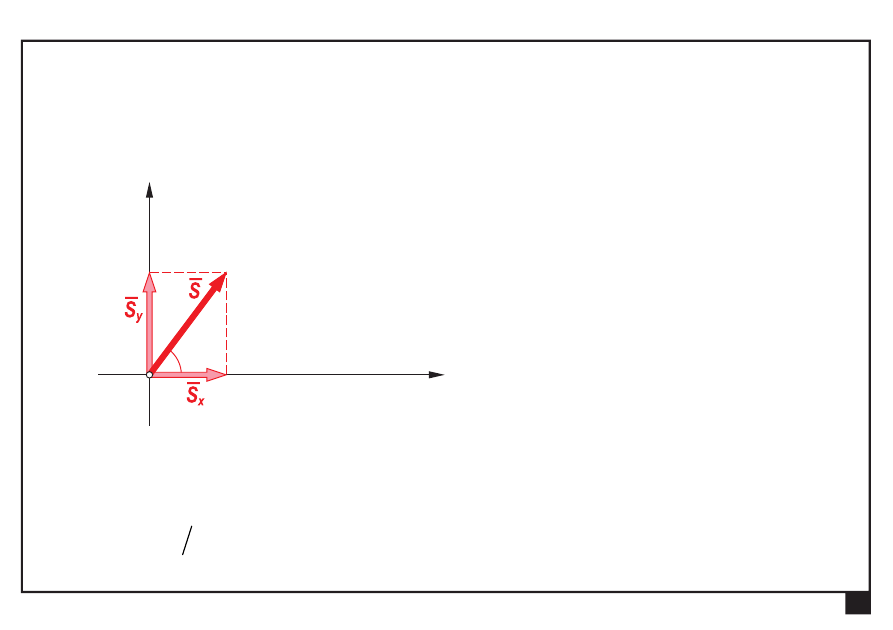
siła na płaszczyźnie opisana jest
przez
4 wielkości
A
A
,
,
,
y
x
P
P
y
x
lub
A
A
,
,
,
y
x
P
α
α
— kąt kierunkowy prostej działania siły
x
y
P
P
=
α
tg
Płaskie układy obciążeń, redukcja i równowaga.
mechanika techniczna | statyka
2
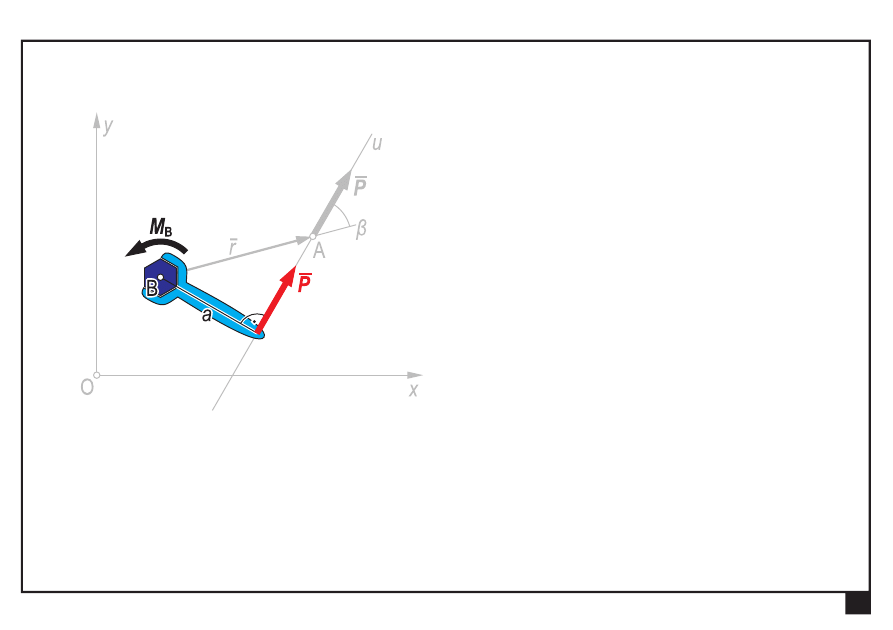
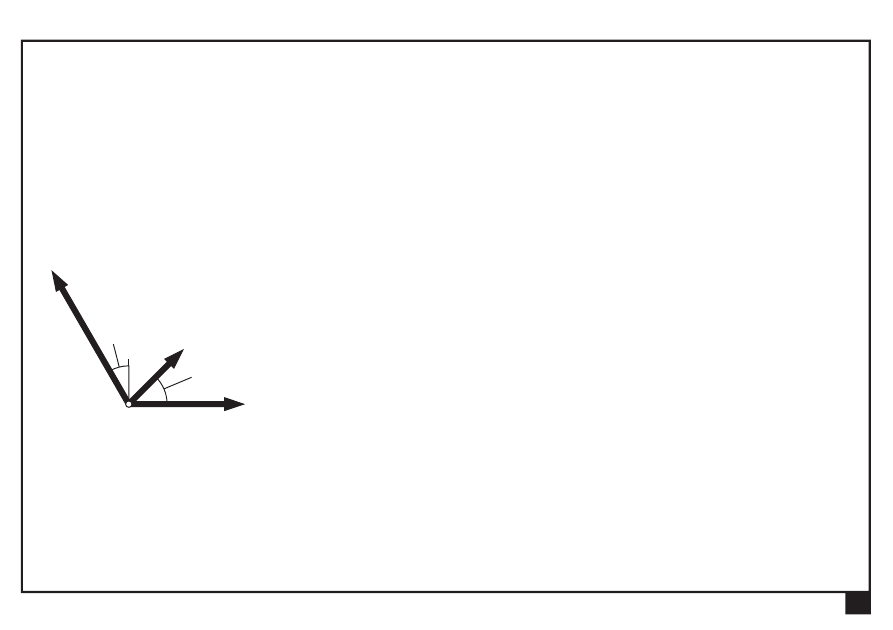
Moment siły względem punktu
Płaskie układy obciążeń, redukcja i równowaga.
mechanika techniczna | statyka
2
Moment siły względem punktu
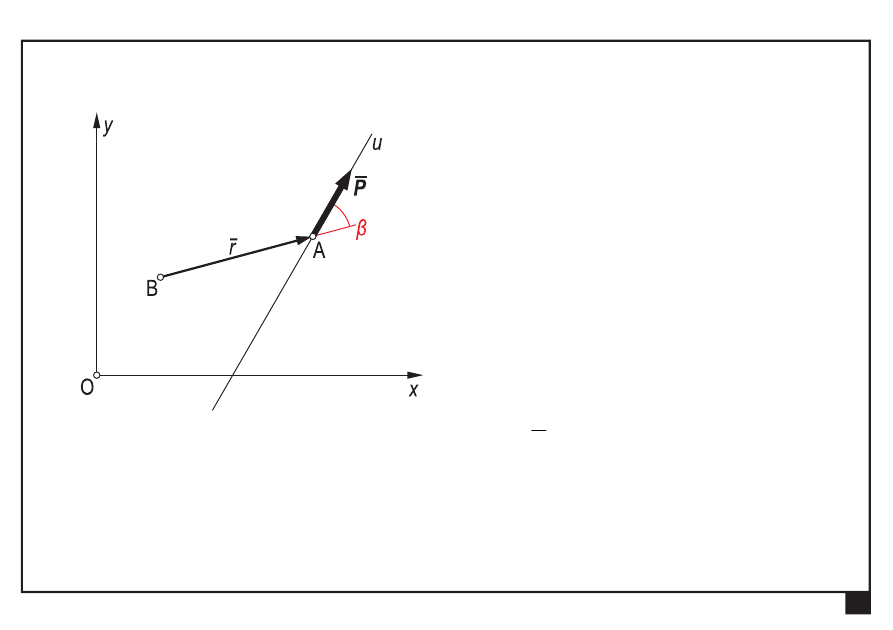
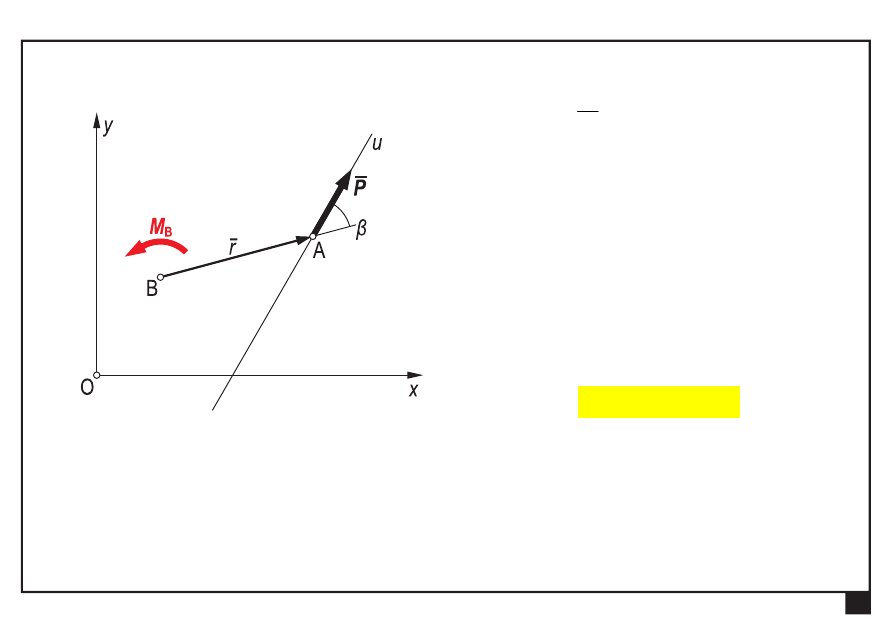
β
— kąt pomiędzy prostą działania siły P a promieniem siły
względem punktu B
Płaskie układy obciążeń, redukcja i równowaga.
mechanika techniczna | statyka
2
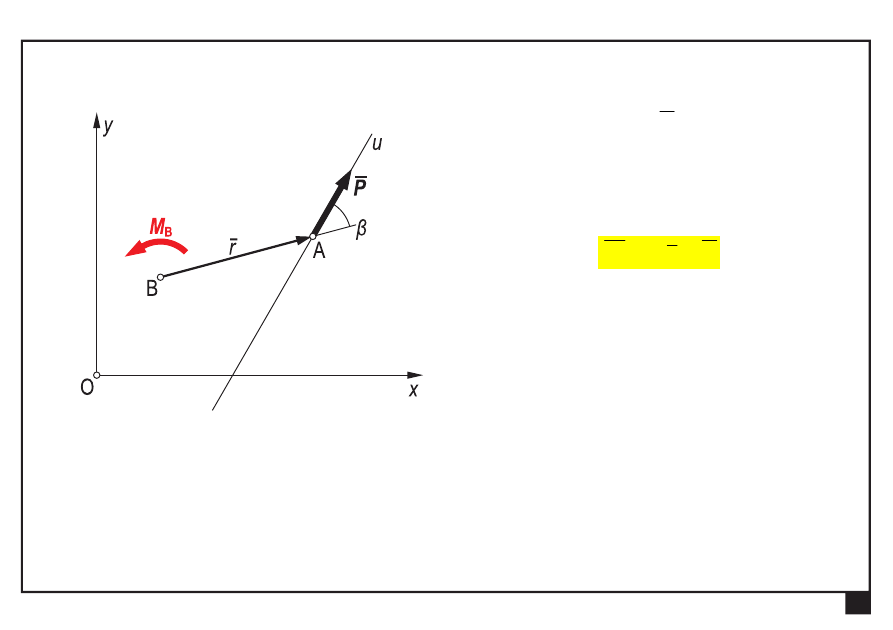
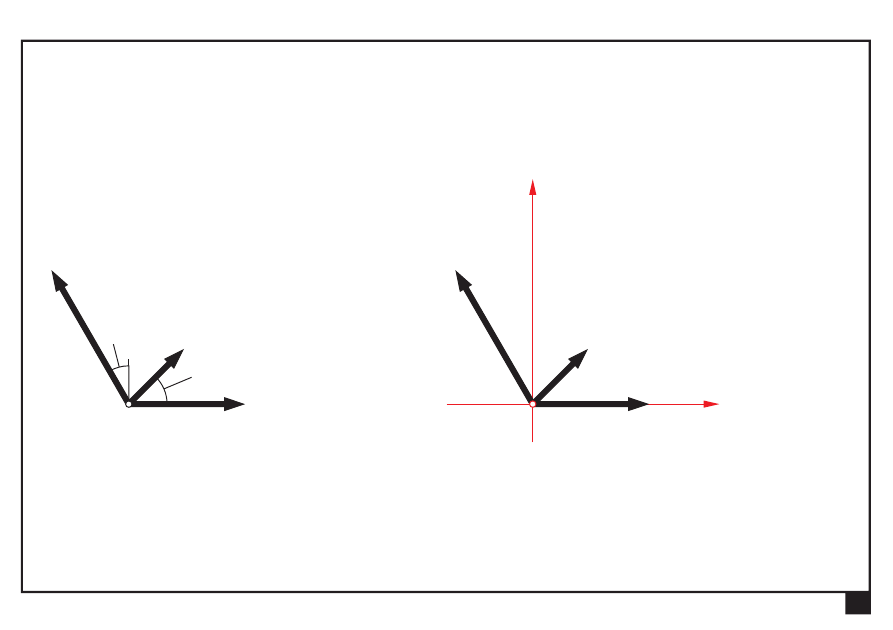
Moment siły względem punktu
momentem siły P
względem punktu B nazywamy
wektor
P
r
M
×
=
B
Płaskie układy obciążeń, redukcja i równowaga.
mechanika techniczna | statyka
2
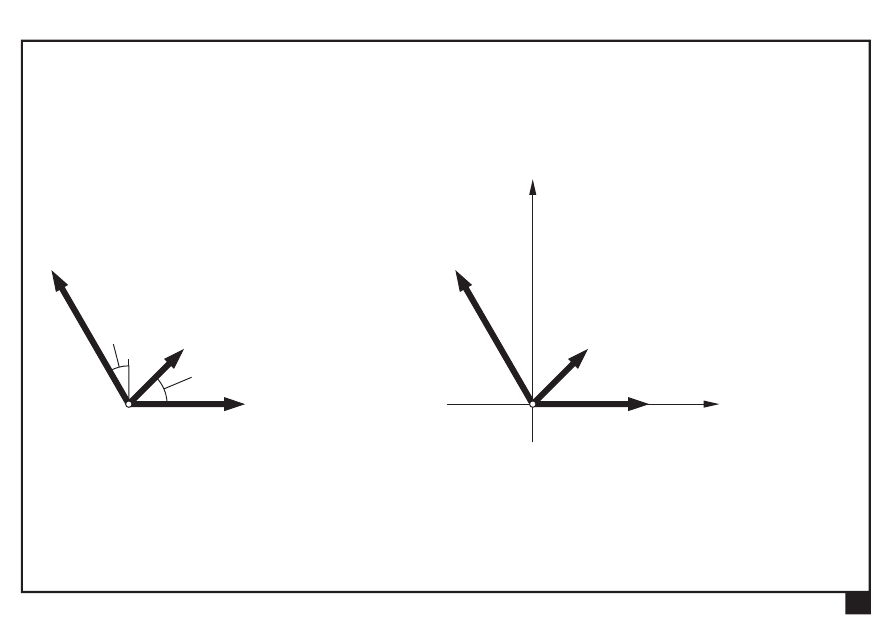
Moment siły względem punktu
moment
B
M
— wektor prostopadły
do płaszczyzny y
x
— zwrot wektora zgodny
z regułą prawej dłoni
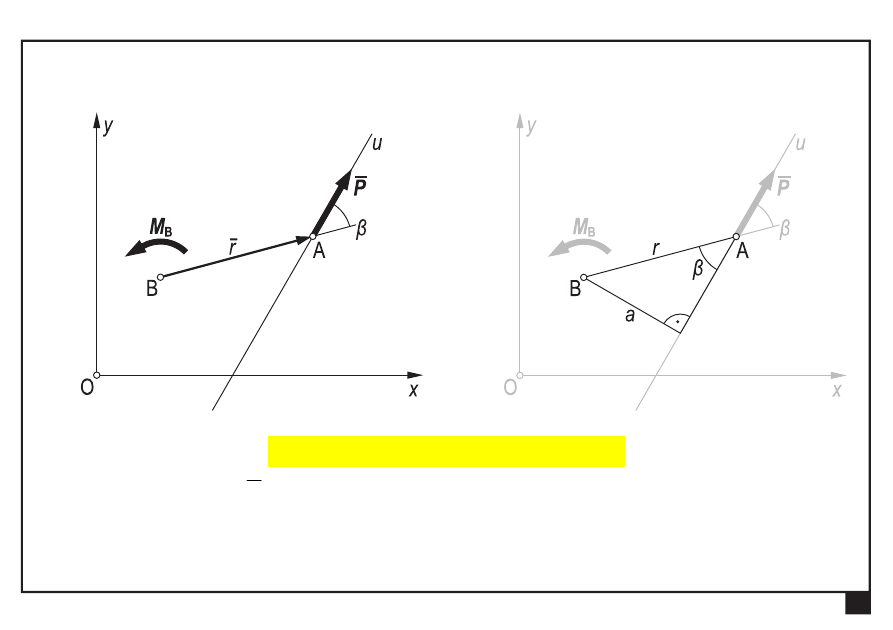
— wartość (moduł) wektora
β
P
r
M
sin
B
=
Płaskie układy obciążeń, redukcja i równowaga.
mechanika techniczna | statyka
2
Moment siły względem punktu
a
P
β
r
P
β
P
r
M
=
=
=
)
sin
(
sin
B
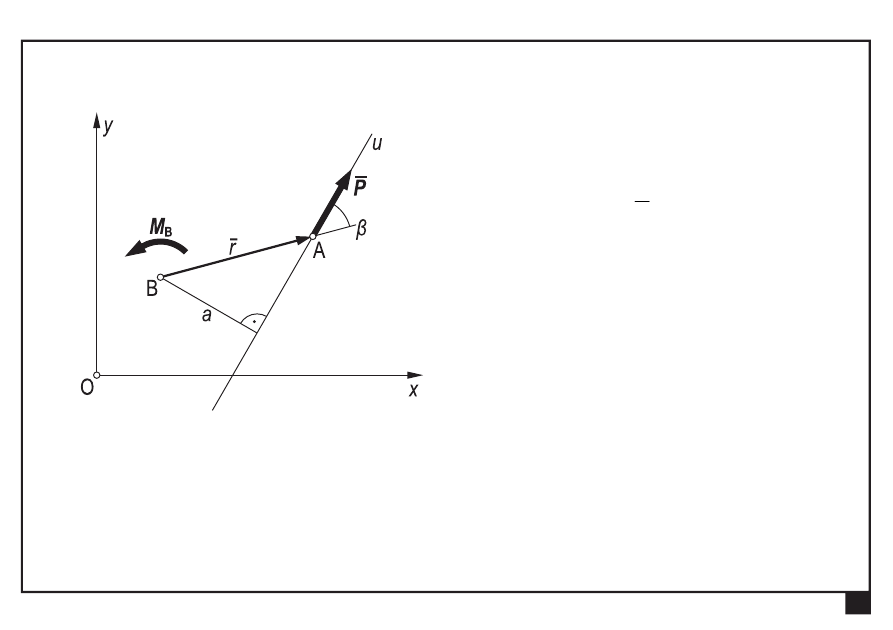
a — ramię siły P względem punktu B (
najmniejsza odległość
prostej działania siły od punktu B
)
Płaskie układy obciążeń, redukcja i równowaga.
mechanika techniczna | statyka
2
Moment siły względem punktu
Wartość momentu
B
M
nie zależy
od wyboru
punktu A na prostej
działania siły P
Płaskie układy obciążeń, redukcja i równowaga.
mechanika techniczna | statyka
2
Moment siły względem punktu
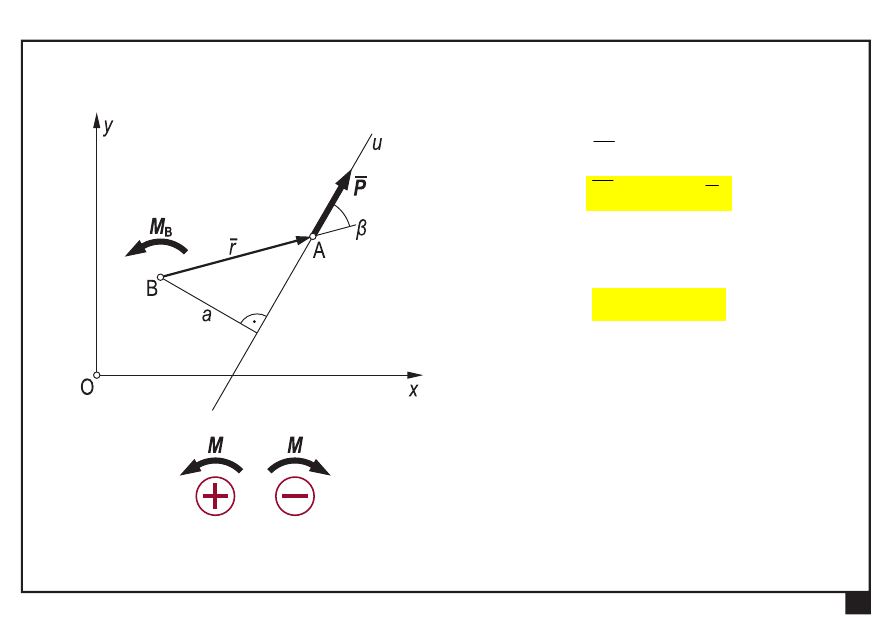
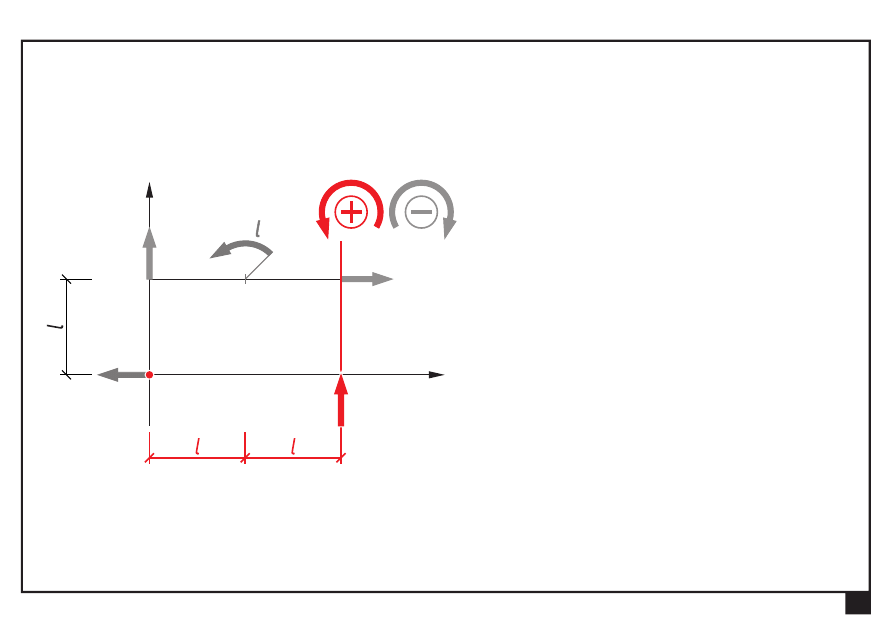
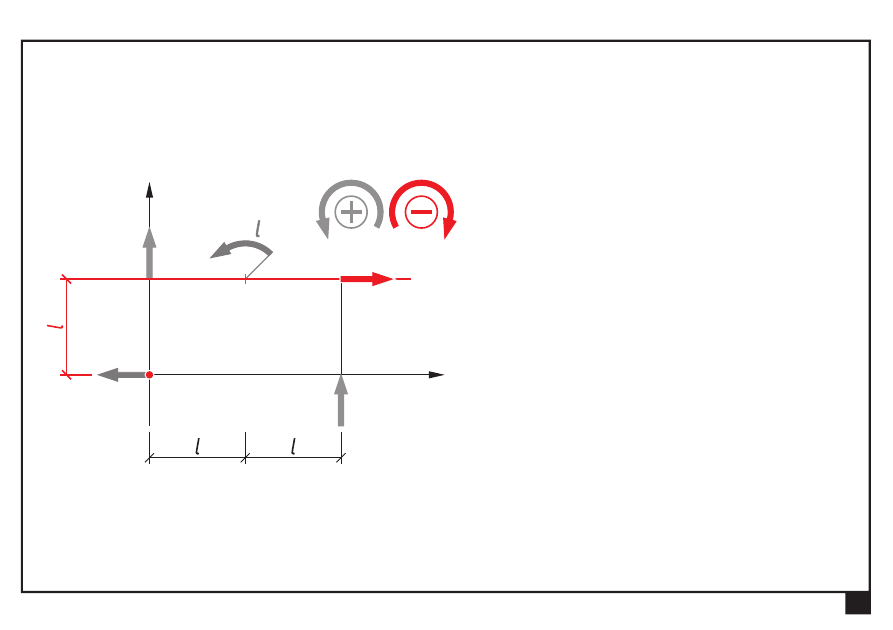
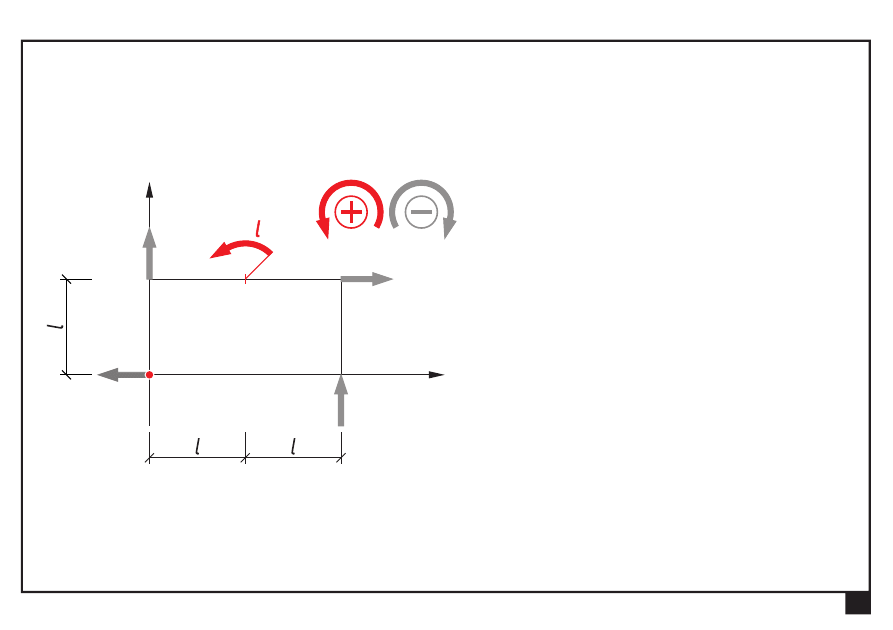
Zapis analityczny
momentu
B
M
z
z
M
M
e
B
B
=
— składowa momentu
a
P
M
z
±
=
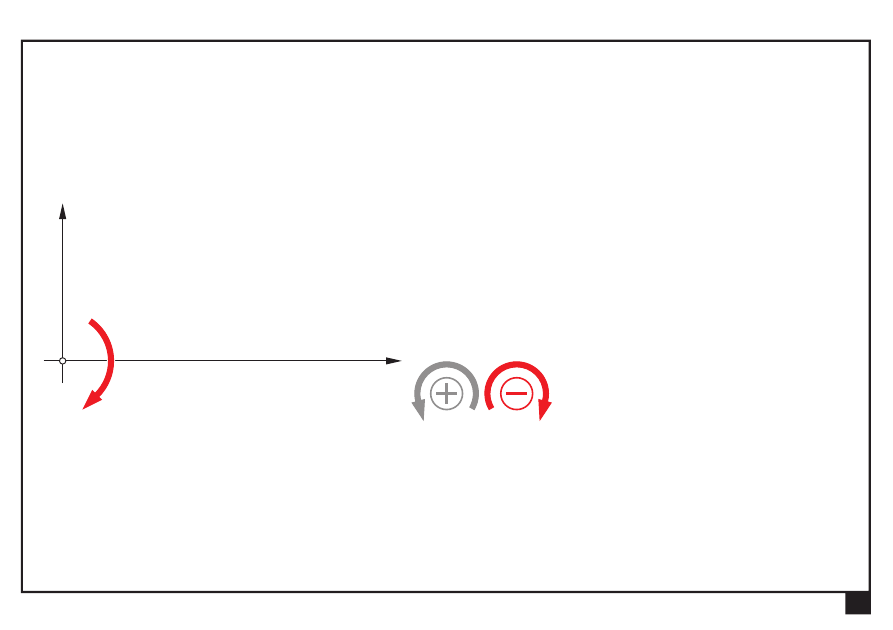
B
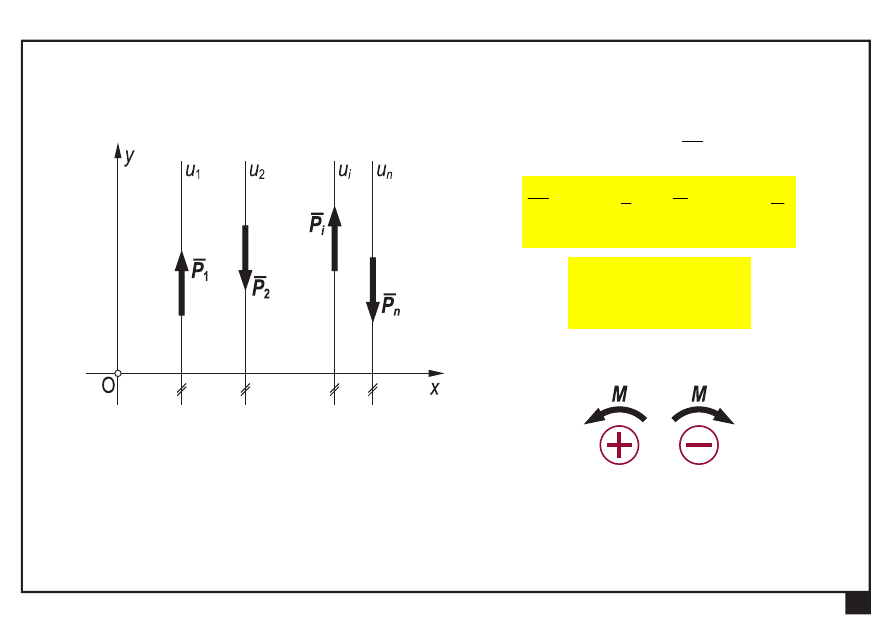
—
znak (+)
odpowiada
momentowi działającemu
przeciwnie do obrotu
wskazówek zegara
Płaskie układy obciążeń, redukcja i równowaga.
mechanika techniczna | statyka
2
Moment siły względem punktu
Płaskie układy obciążeń, redukcja i równowaga.
mechanika techniczna | statyka
2
Redukcja i równowaga płaskich układów obciążeń
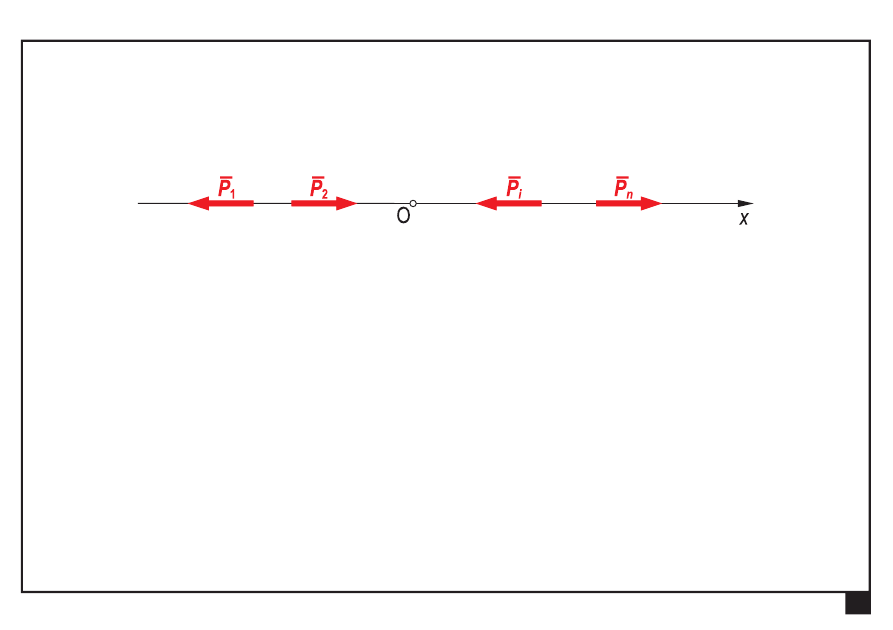
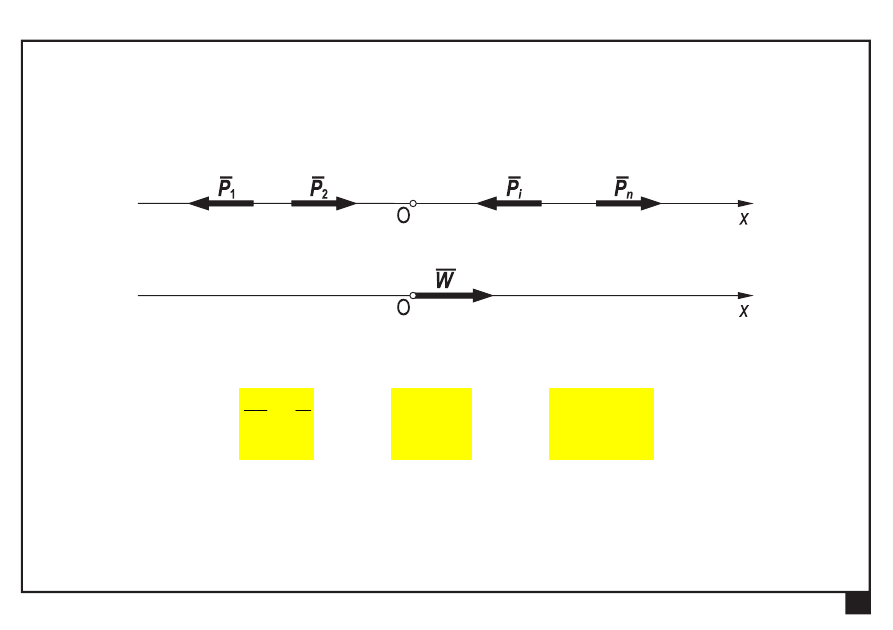
Kolinearny (współliniowy) układ sił
Płaskie układy obciążeń, redukcja i równowaga.
mechanika techniczna | statyka
2
Redukcja i równowaga płaskich układów obciążeń
Kolinearny (współliniowy) układ sił
Płaskie układy obciążeń, redukcja i równowaga.
mechanika techniczna | statyka
2
Redukcja i równowaga płaskich układów obciążeń
Kolinearny (współliniowy) układ sił
redukuje się do
wypadkowej
, kolinearnej z układem sił
x
x
n
i
i
W
P
W
e
1
=
=
=
=
=
n
i
ix
x
P
W
1
Płaskie układy obciążeń, redukcja i równowaga.
mechanika techniczna | statyka
2
Redukcja i równowaga płaskich układów obciążeń
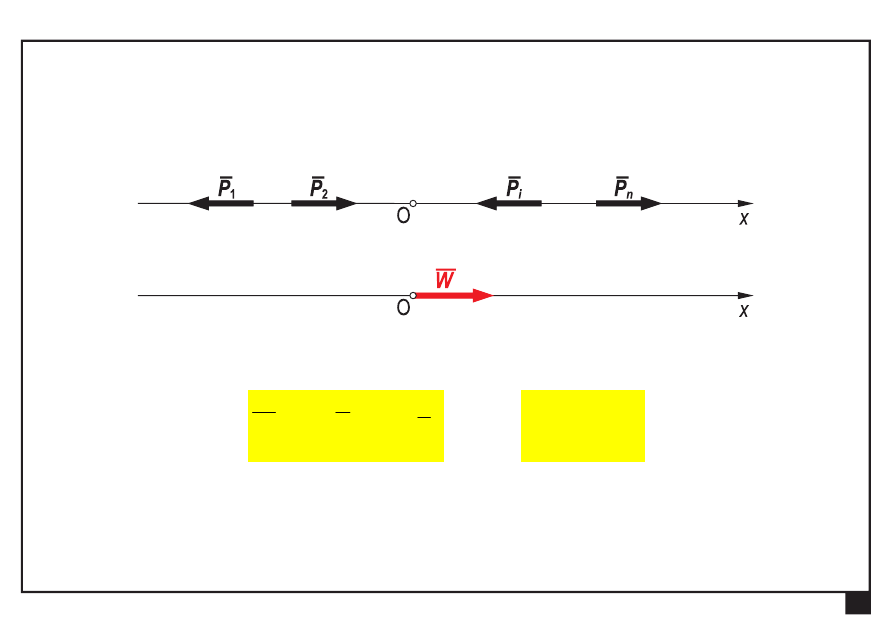
Kolinearny (współliniowy) układ sił
jest w równowadze, jeśli wypadkowa jest równa zeru
0
=
W
0
=
x
W
0
1
=
=
n
i
ix
P
Suma rzutów sił na oś x jest równa zeru
1 RRS (jedno równanie równowagi statycznej)
Płaskie układy obciążeń, redukcja i równowaga.
mechanika techniczna | statyka
2
Redukcja i równowaga płaskich układów obciążeń
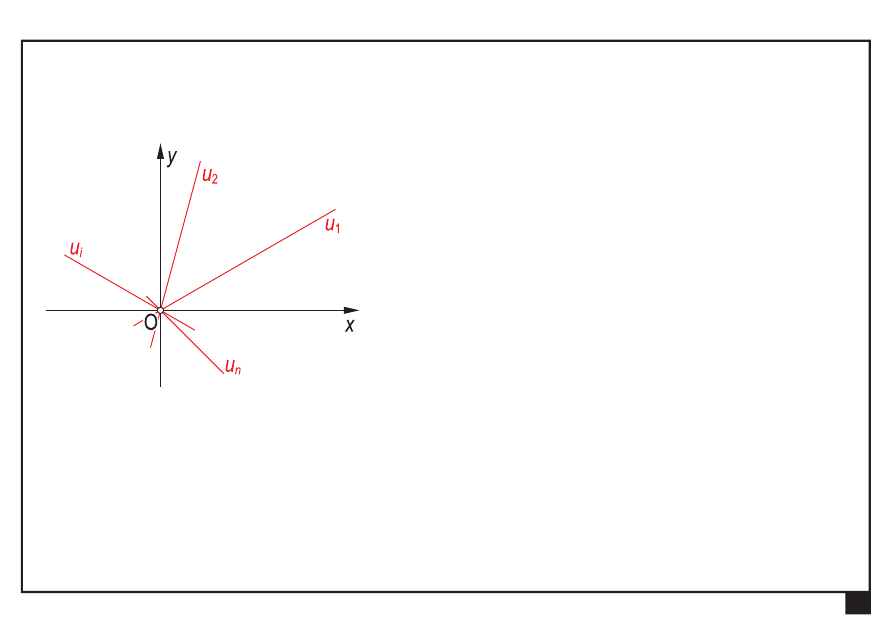
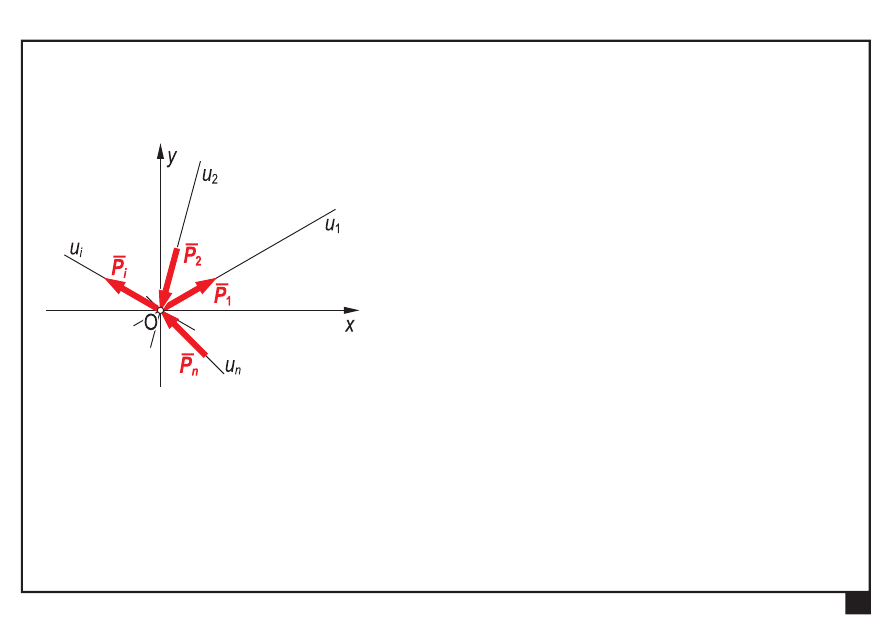
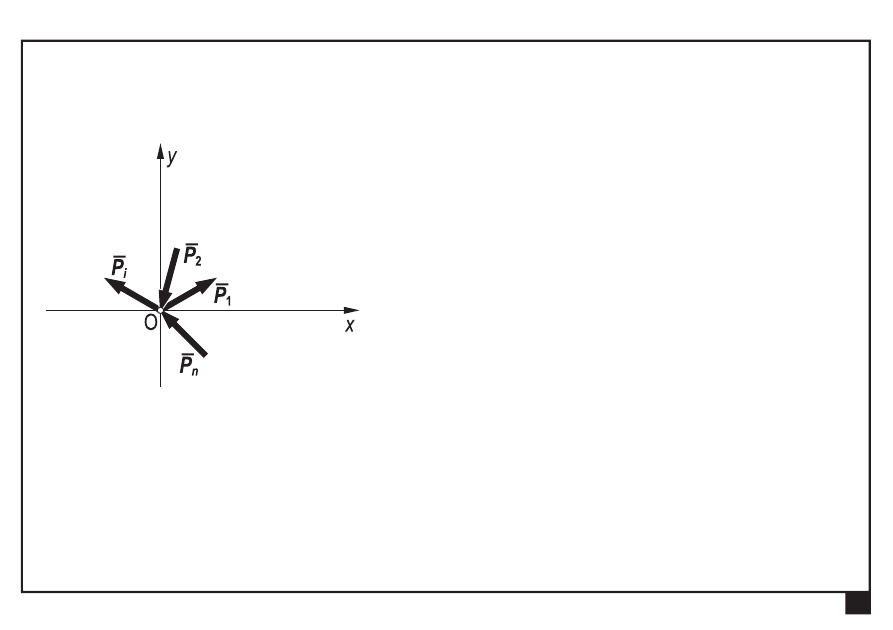
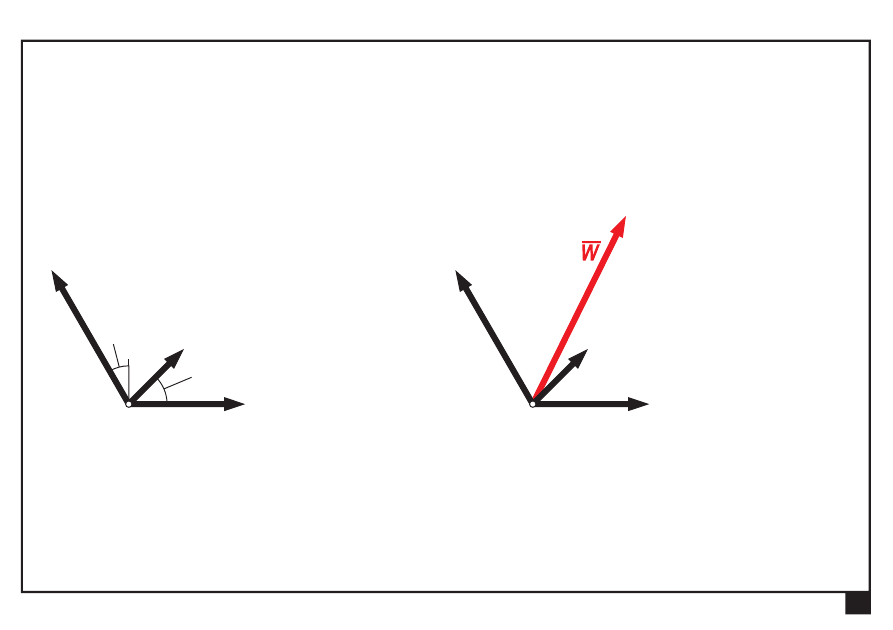
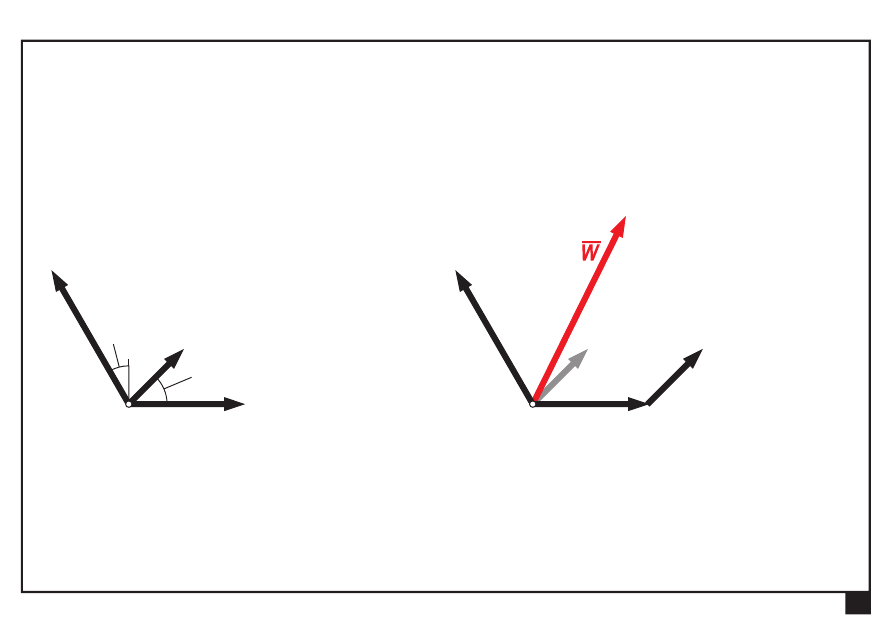
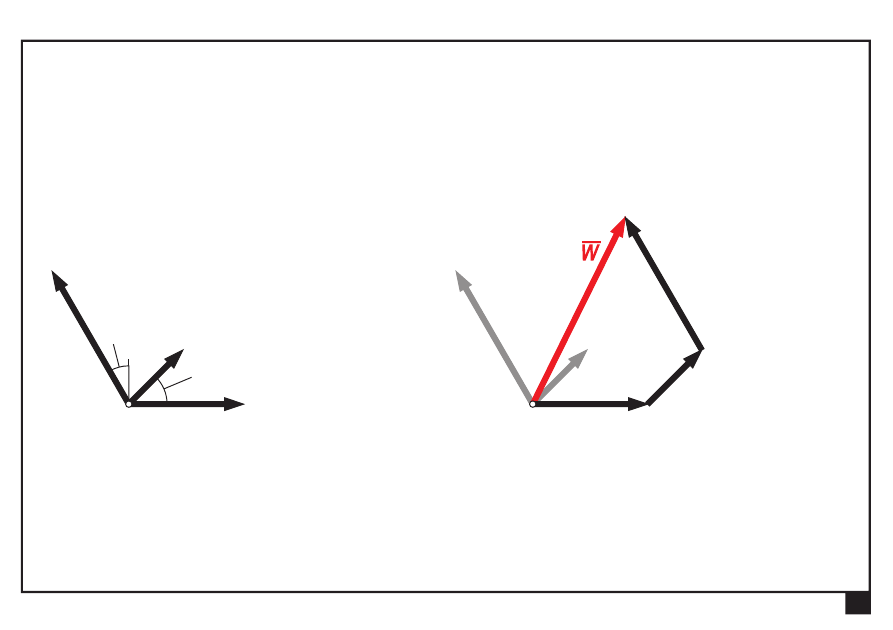
Zbieżny układ sił
Płaskie układy obciążeń, redukcja i równowaga.
mechanika techniczna | statyka
2
Redukcja i równowaga płaskich układów obciążeń
Zbieżny układ sił
linie działania sił przecinają się w jednym punkcie
Płaskie układy obciążeń, redukcja i równowaga.
mechanika techniczna | statyka
2
Redukcja i równowaga płaskich układów obciążeń
Zbieżny układ sił
linie działania sił przecinają się w jednym punkcie
Płaskie układy obciążeń, redukcja i równowaga.
mechanika techniczna | statyka
2
Redukcja i równowaga płaskich układów obciążeń
Zbieżny układ sił
rozpatruje się w początku układu współrzędnych xy
Płaskie układy obciążeń, redukcja i równowaga.
mechanika techniczna | statyka
2
Redukcja i równowaga płaskich układów obciążeń
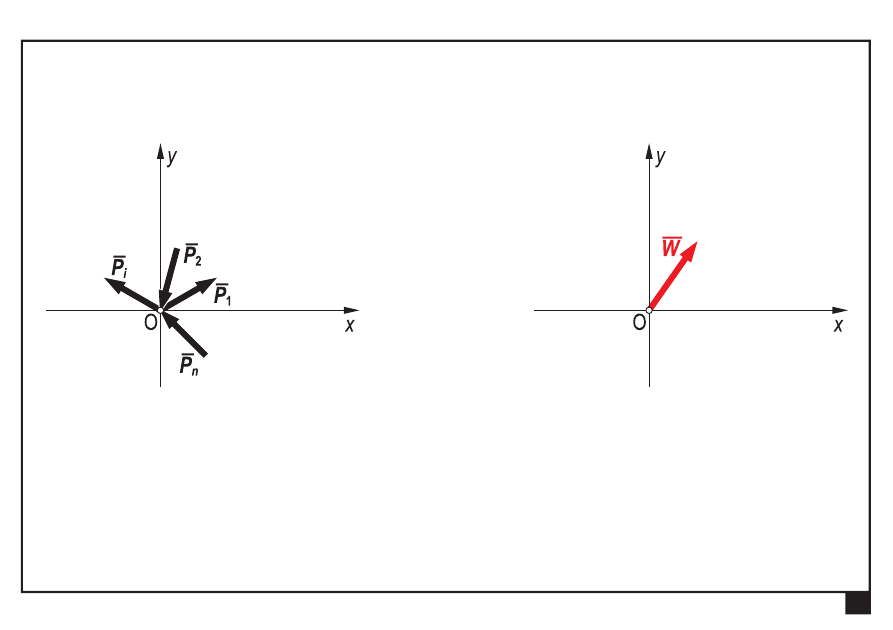
Zbieżny układ sił
redukuje się do
wypadkowej
o prostej działania
przechodzącej przez punkt zbieżności układu
Płaskie układy obciążeń, redukcja i równowaga.
mechanika techniczna | statyka
2
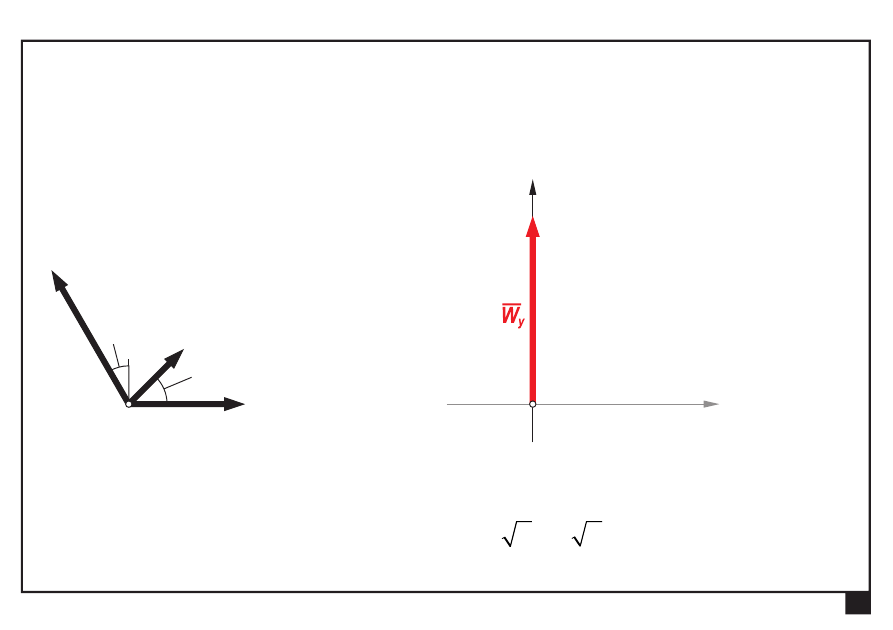
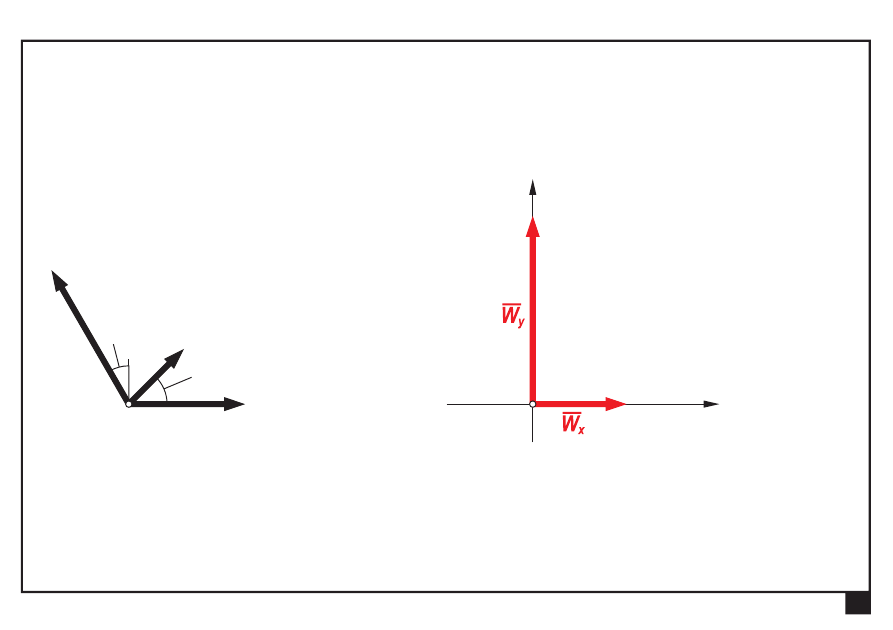
Redukcja i równowaga płaskich układów obciążeń
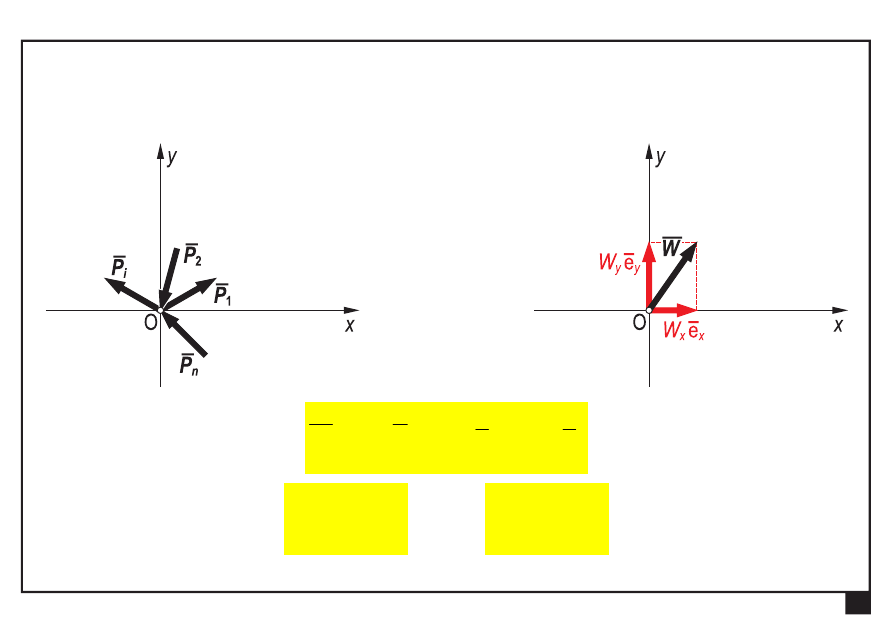
Zbieżny układ sił
y
y
x
x
n
i
i
W
W
P
W
e
e
1
+
=
=
=
=
=
n
i
ix
x
P
W
1
=
=
n
i
iy
y
P
W
1
Płaskie układy obciążeń, redukcja i równowaga.
mechanika techniczna | statyka
2
Redukcja i równowaga płaskich układów obciążeń
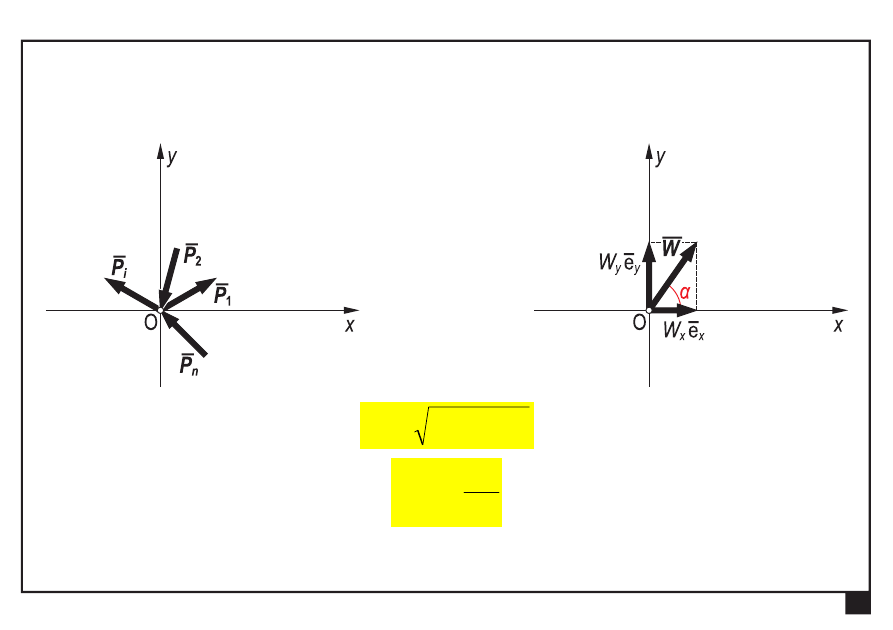
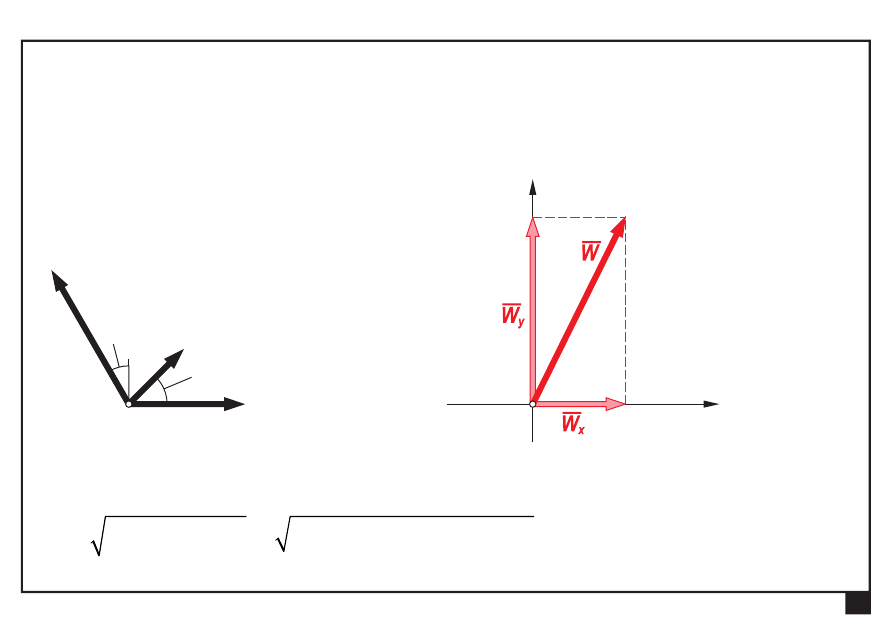
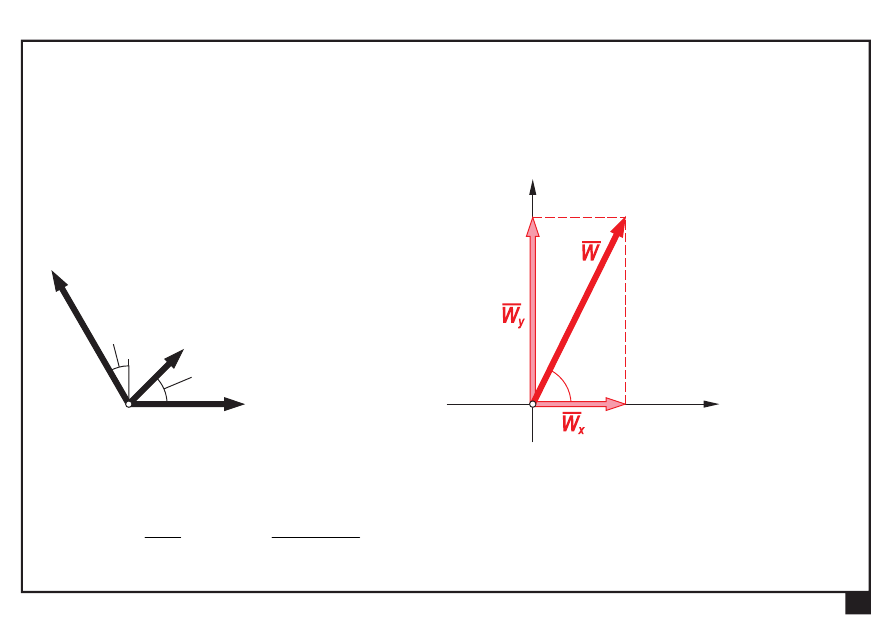
Zbieżny układ sił
2
2
y
x
W
W
W
+
=
x
y
W
W
=
α
tg
Płaskie układy obciążeń, redukcja i równowaga.
mechanika techniczna | statyka
2
Redukcja i równowaga płaskich układów obciążeń
Zbieżny układ sił
jest w równowadze, jeśli wypadkowa jest równa zeru
0
=
W
0
=
x
W
0
1
=
=
n
i
ix
P
Suma rzutów sił na oś x jest równa zeru
0
=
y
W
0
1
=
=
n
i
iy
P
Suma rzutów sił na oś y jest równa zeru
2 RRS (dwa równania równowagi statycznej)
Płaskie układy obciążeń, redukcja i równowaga.
mechanika techniczna | statyka
2
Redukcja i równowaga płaskich układów obciążeń
Zbieżny układ sił
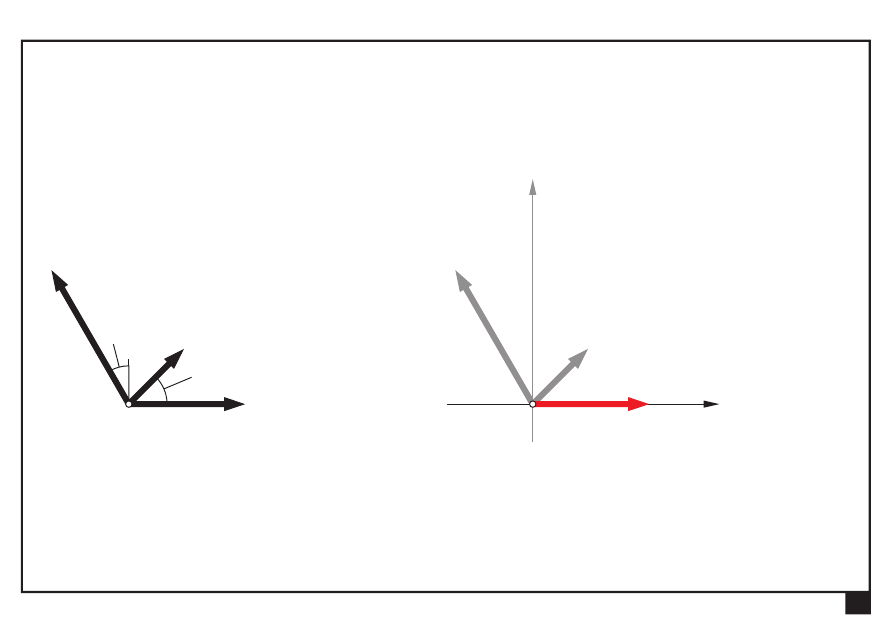
Dokonać redukcji płaskiego zbieżnego układu sił
3P
4P
45°
30°
2P
Płaskie układy obciążeń, redukcja i równowaga.
mechanika techniczna | statyka
2
Redukcja i równowaga płaskich układów obciążeń
Zbieżny układ sił
Dokonać redukcji płaskiego zbieżnego układu sił
3P
4P
45°
30°
2P
3P
4P
x
y
O
2P
Układ współrzędnych Oxy obieramy w punkcie zbieżności
Płaskie układy obciążeń, redukcja i równowaga.
mechanika techniczna | statyka
2
Redukcja i równowaga płaskich układów obciążeń
Zbieżny układ sił
Dokonać redukcji płaskiego zbieżnego układu sił
3P
4P
45°
30°
2P
3P
4P
x
y
O
2P
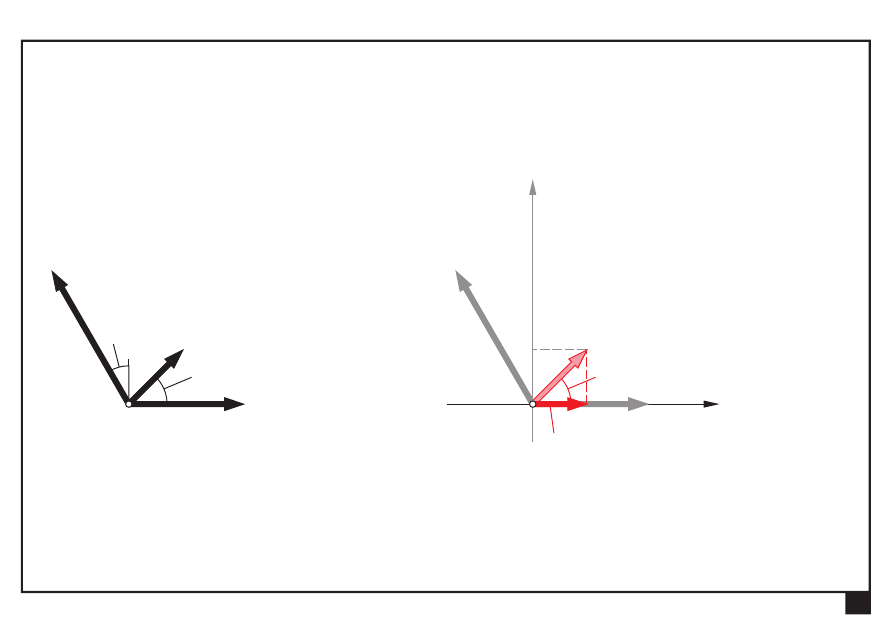
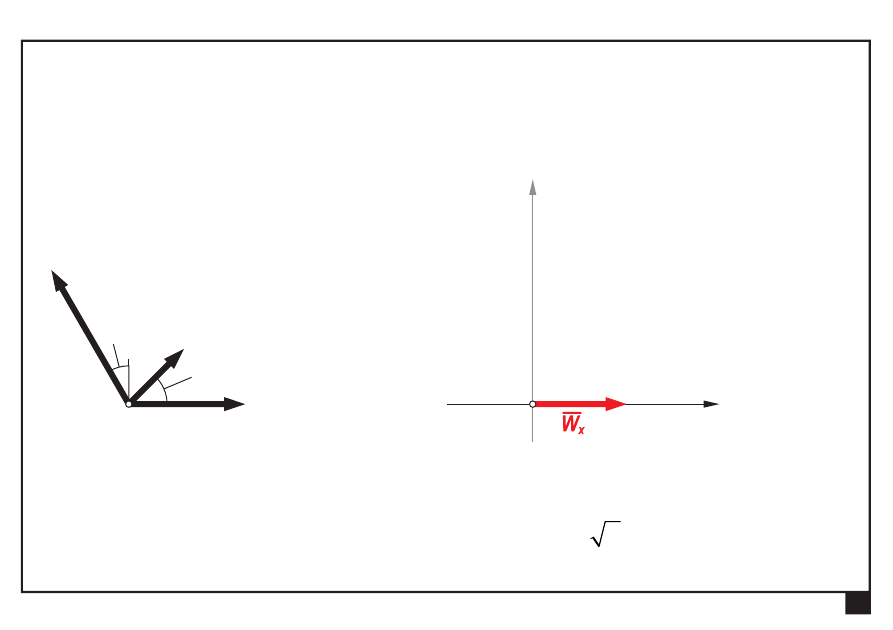
Wyznaczamy składowe W
x
, W
y
wypadkowej W:
Płaskie układy obciążeń, redukcja i równowaga.
mechanika techniczna | statyka
2
Redukcja i równowaga płaskich układów obciążeń
Zbieżny układ sił
Dokonać redukcji płaskiego zbieżnego układu sił
3P
4P
45°
30°
2P
3P
4P
x
y
O
2P
Wyznaczamy składowe W
x
, W
y
wypadkowej W:
= Σ
= 3
x
ix
W
P
P
Płaskie układy obciążeń, redukcja i równowaga.
mechanika techniczna | statyka
2
Redukcja i równowaga płaskich układów obciążeń
Zbieżny układ sił
Dokonać redukcji płaskiego zbieżnego układu sił
3P
4P
45°
30°
2P
3P
4P
45°
x
y
2 cos45°
P
O
2P
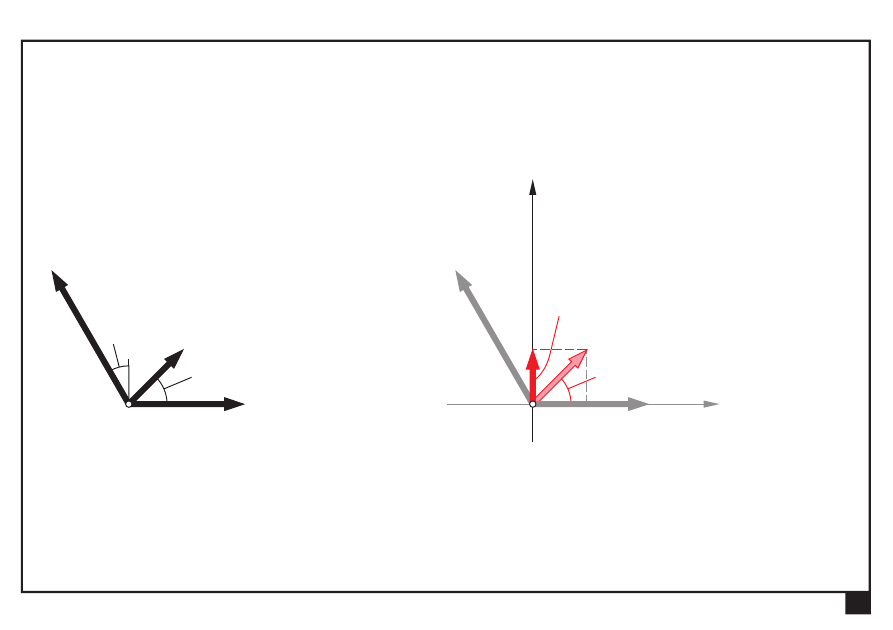
Wyznaczamy składowe W
x
, W
y
wypadkowej W:
= Σ
=
+
°
3
2 cos 45
x
ix
W
P
P
P
Płaskie układy obciążeń, redukcja i równowaga.
mechanika techniczna | statyka
2
Redukcja i równowaga płaskich układów obciążeń
Zbieżny układ sił
Dokonać redukcji płaskiego zbieżnego układu sił
3P
4P
45°
30°
2P
3P
4P
x
y
O
4 sin30°
P
30°
2P
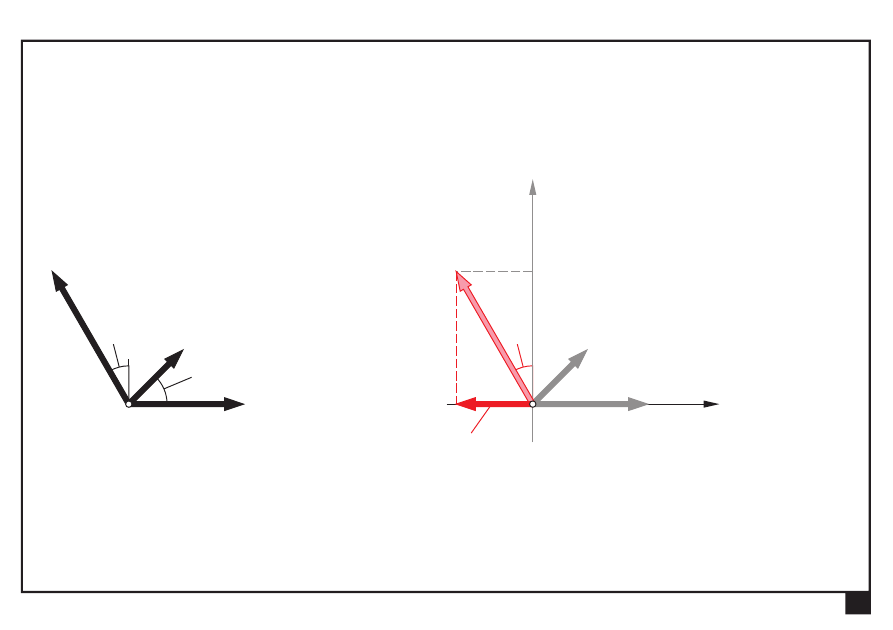
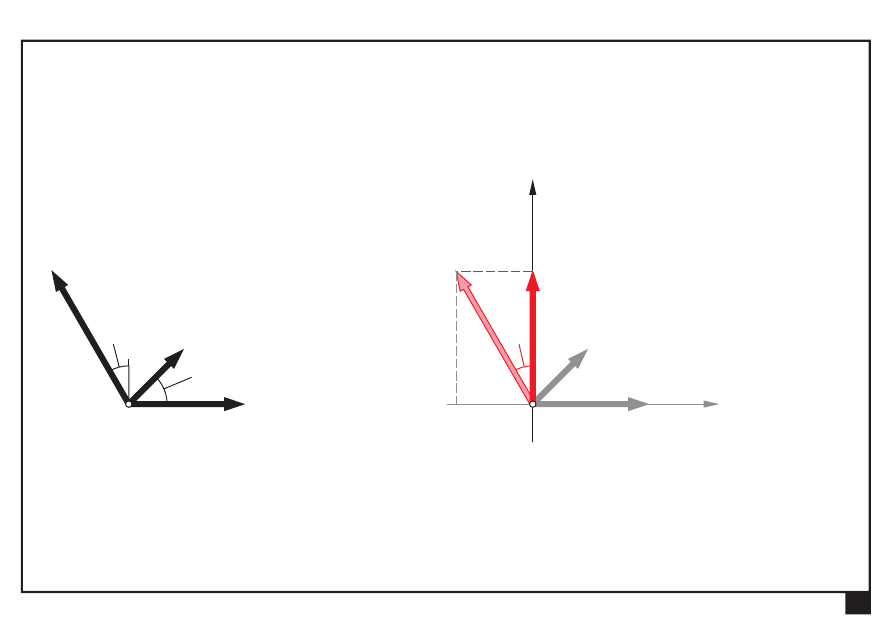
Wyznaczamy składowe W
x
, W
y
wypadkowej W:
= Σ
=
+
° −
° =
3
2 cos 45
4 sin30
x
ix
W
P
P
P
P
Płaskie układy obciążeń, redukcja i równowaga.
mechanika techniczna | statyka
2
Redukcja i równowaga płaskich układów obciążeń
Zbieżny układ sił
Dokonać redukcji płaskiego zbieżnego układu sił
3P
4P
45°
30°
2P
x
y
O
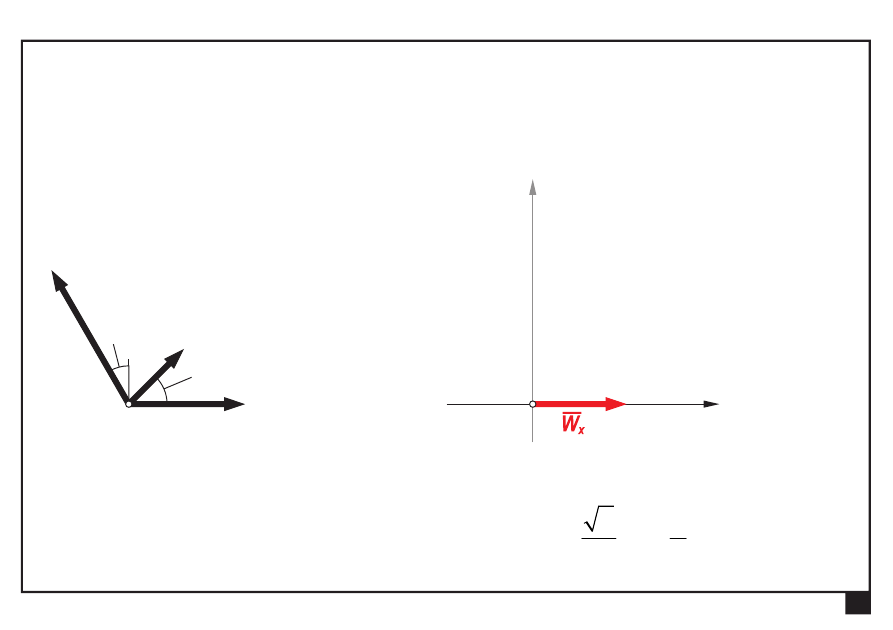
Wyznaczamy składowe W
x
, W
y
wypadkowej W:
= Σ
=
+
° −
° =
+ ⋅
− ⋅
=
2
1
3
2 cos 45
4 sin30
3 2
4
2
2
x
ix
W
P
P
P
P
P
Płaskie układy obciążeń, redukcja i równowaga.
mechanika techniczna | statyka
2
Redukcja i równowaga płaskich układów obciążeń
Zbieżny układ sił
Dokonać redukcji płaskiego zbieżnego układu sił
3P
4P
45°
30°
2P
x
y
O
Wyznaczamy składowe W
x
, W
y
wypadkowej W:
= Σ
=
+
° −
° =
= +
≈
3
2 cos 45
4 sin30
... (1
2)
2,414
x
ix
W
P
P
P
P
P
P
Płaskie układy obciążeń, redukcja i równowaga.
mechanika techniczna | statyka
2
Redukcja i równowaga płaskich układów obciążeń
Zbieżny układ sił
Dokonać redukcji płaskiego zbieżnego układu sił
3P
4P
45°
30°
2P
3P
4P
45°
x
y
2 sin45°
P
O
2P
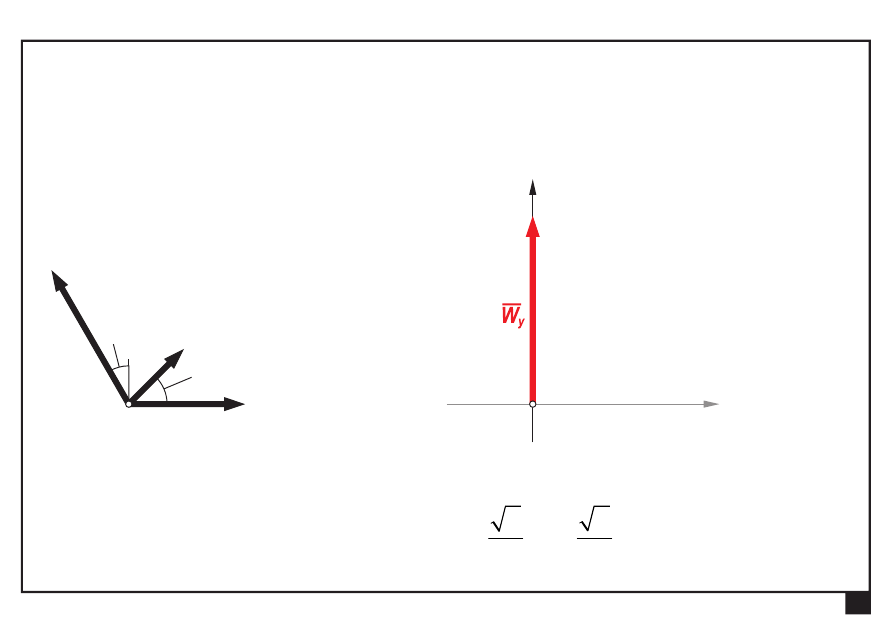
Wyznaczamy składowe W
x
, W
y
wypadkowej W:
= Σ
=
°
2 sin 45
y
iy
W
P
P
Płaskie układy obciążeń, redukcja i równowaga.
mechanika techniczna | statyka
2
Redukcja i równowaga płaskich układów obciążeń
Zbieżny układ sił
Dokonać redukcji płaskiego zbieżnego układu sił
3P
4P
45°
30°
2P
3P
4P
x
y
O
30°
2P
4 cos30°
P
Wyznaczamy składowe W
x
, W
y
wypadkowej W:
= Σ
=
° +
° =
2 sin 45
4 cos 30
y
iy
W
P
P
P
Płaskie układy obciążeń, redukcja i równowaga.
mechanika techniczna | statyka
2
Redukcja i równowaga płaskich układów obciążeń
Zbieżny układ sił
Dokonać redukcji płaskiego zbieżnego układu sił
3P
4P
45°
30°
2P
x
y
O
Wyznaczamy składowe W
x
, W
y
wypadkowej W:
= Σ
=
° +
° =
⋅
+ ⋅
=
2
3
2 sin 45
4 cos 30
2
4
2
2
y
iy
W
P
P
P
P
Płaskie układy obciążeń, redukcja i równowaga.
mechanika techniczna | statyka
2
Redukcja i równowaga płaskich układów obciążeń
Zbieżny układ sił
Dokonać redukcji płaskiego zbieżnego układu sił
3P
4P
45°
30°
2P
x
y
O
Wyznaczamy składowe W
x
, W
y
wypadkowej W:
= Σ
=
° +
° =
=
+
≈
2 sin 45
4 cos 30
... ( 2 2 3)
4,878
y
iy
W
P
P
P
P
P
Płaskie układy obciążeń, redukcja i równowaga.
mechanika techniczna | statyka
2
Redukcja i równowaga płaskich układów obciążeń
Zbieżny układ sił
Dokonać redukcji płaskiego zbieżnego układu sił
3P
4P
45°
30°
2P
x
y
O
Wyznaczamy składowe W
x
, W
y
wypadkowej W:
≈2,414
x
W
P
,
≈ 4,878
y
W
P
Płaskie układy obciążeń, redukcja i równowaga.
mechanika techniczna | statyka
2
Redukcja i równowaga płaskich układów obciążeń
Zbieżny układ sił
Dokonać redukcji płaskiego zbieżnego układu sił
3P
4P
45°
30°
2P
x
y
O
Wyznaczamy wartość (moduł) wypadkowej W:
=
+
=
+
≈
2
2
2
2
(
)
(
)
(2,414 )
(4,878 )
5,443
x
y
W
W
W
P
P
P
Płaskie układy obciążeń, redukcja i równowaga.
mechanika techniczna | statyka
2
Redukcja i równowaga płaskich układów obciążeń
Zbieżny układ sił
Dokonać redukcji płaskiego zbieżnego układu sił
3P
4P
45°
30°
2P
x
y
O
α
Wyznaczamy kąt nachylenia wypadkowej W:
α
=
=
≈
°
4,878
arctg
arctg
63,67
2,414
y
x
W
P
W
P
Płaskie układy obciążeń, redukcja i równowaga.
mechanika techniczna | statyka
2
Redukcja i równowaga płaskich układów obciążeń
Zbieżny układ sił
Dokonać redukcji płaskiego zbieżnego układu sił
3P
4P
45°
30°
2P
3P
4P
2P
Rozwiązanie końcowe
Płaskie układy obciążeń, redukcja i równowaga.
mechanika techniczna | statyka
2
Redukcja i równowaga płaskich układów obciążeń
Zbieżny układ sił
Dokonać redukcji płaskiego zbieżnego układu sił
3P
4P
45°
30°
2P
3P
4P
2P
2P
Redukcji można także dokonać w sposób wykreślny
Płaskie układy obciążeń, redukcja i równowaga.
mechanika techniczna | statyka
2
Redukcja i równowaga płaskich układów obciążeń
Zbieżny układ sił
Dokonać redukcji płaskiego zbieżnego układu sił
3P
4P
45°
30°
2P
3P
4P
2P
4P
2P
Redukcji można także dokonać w sposób wykreślny
Płaskie układy obciążeń, redukcja i równowaga.
mechanika techniczna | statyka
2
Redukcja i równowaga płaskich układów obciążeń
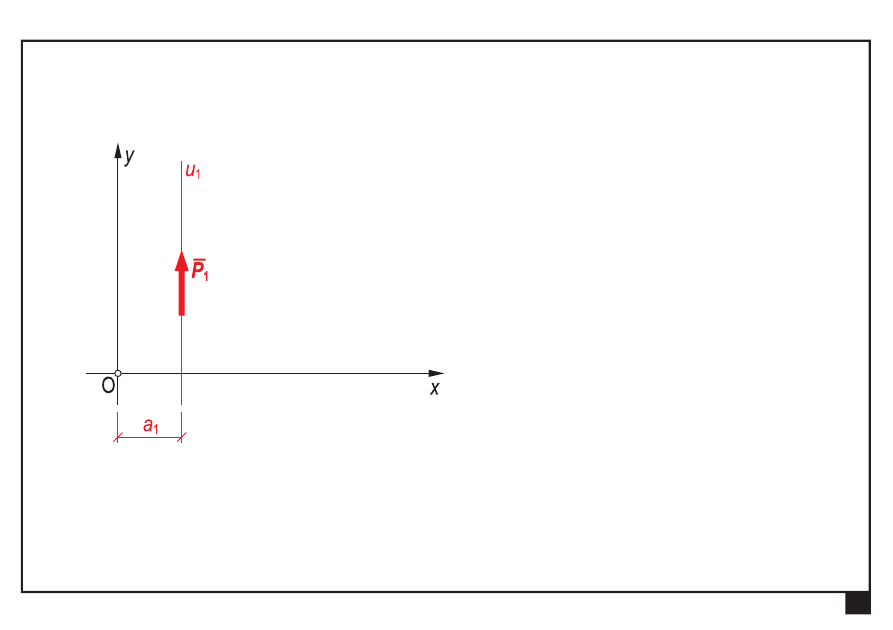
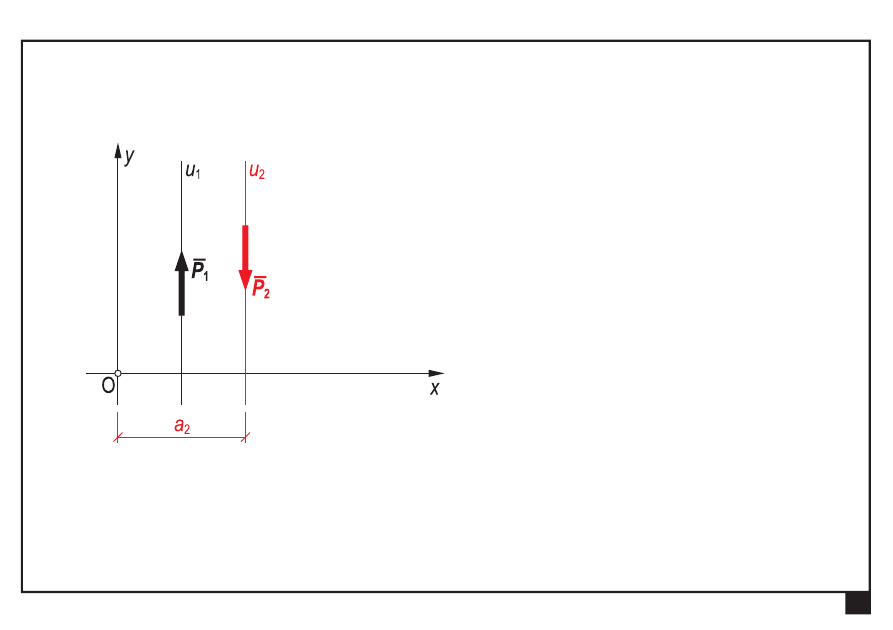
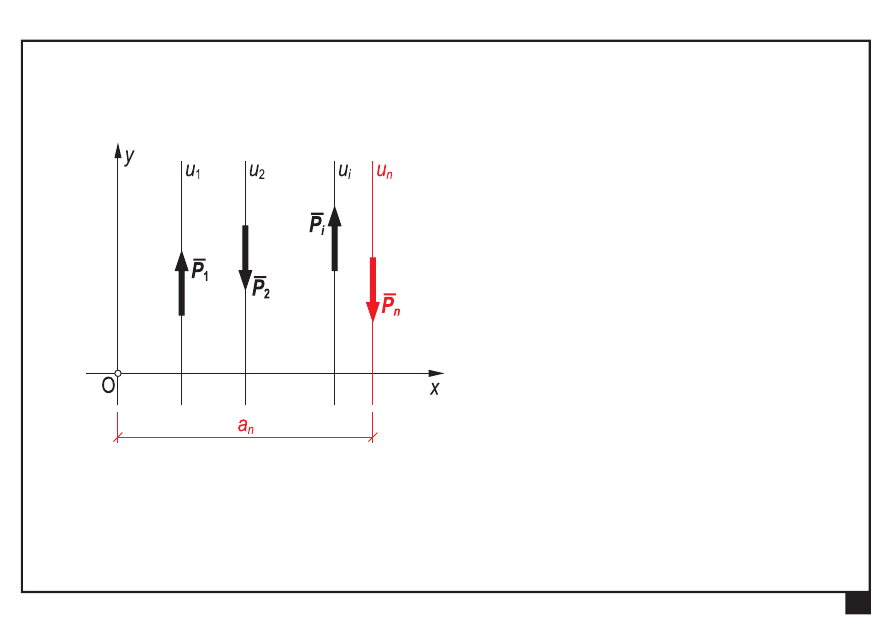
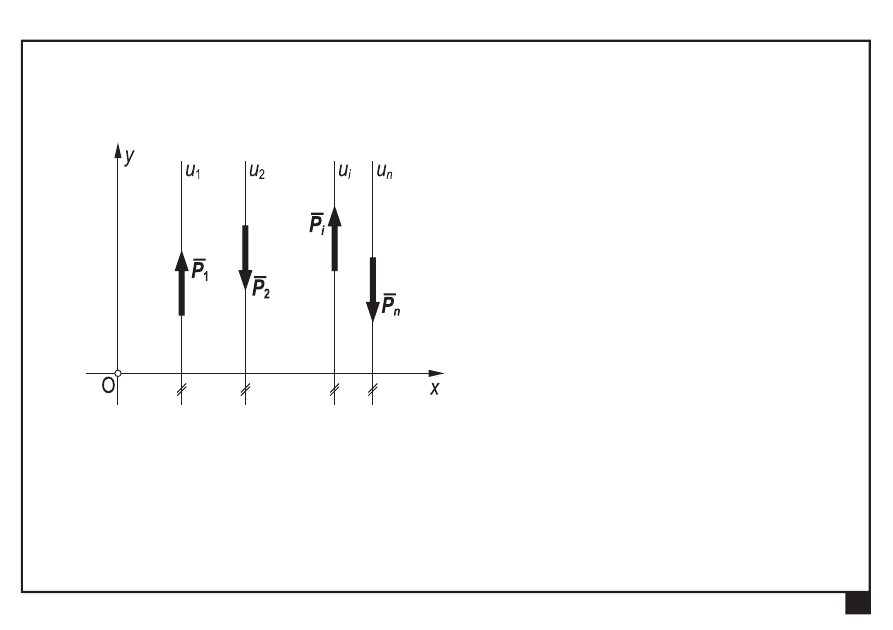
Równoległy układ sił
Płaskie układy obciążeń, redukcja i równowaga.
mechanika techniczna | statyka
2
Redukcja i równowaga płaskich układów obciążeń
Równoległy układ sił
Płaskie układy obciążeń, redukcja i równowaga.
mechanika techniczna | statyka
2
Redukcja i równowaga płaskich układów obciążeń
Równoległy układ sił
Płaskie układy obciążeń, redukcja i równowaga.
mechanika techniczna | statyka
2
Redukcja i równowaga płaskich układów obciążeń
Równoległy układ sił
Płaskie układy obciążeń, redukcja i równowaga.
mechanika techniczna | statyka
2
Redukcja i równowaga płaskich układów obciążeń
Równoległy układ sił
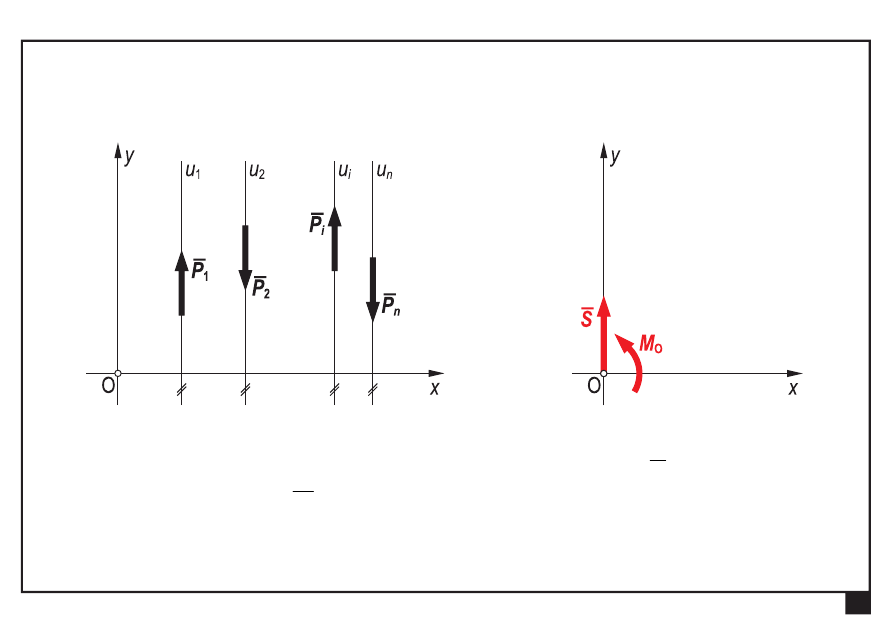
linie działania sił są równoległe
Płaskie układy obciążeń, redukcja i równowaga.
mechanika techniczna | statyka
2
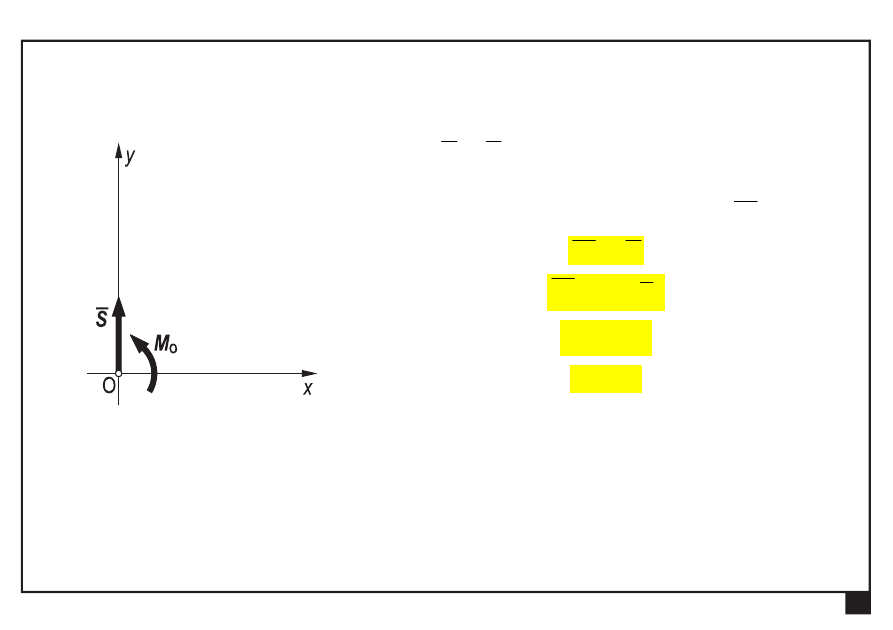
Redukcja i równowaga płaskich układów obciążeń
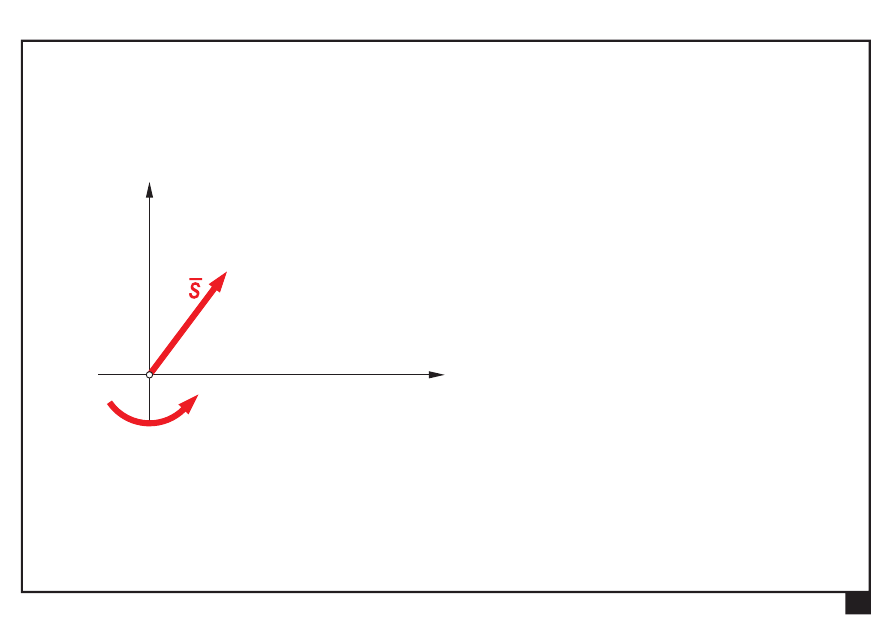
Równoległy układ sił
redukuje się wstępnie do punktu O, do siły ogólnej S
i momentu ogólnego
O
M

Płaskie układy obciążeń, redukcja i równowaga.
mechanika techniczna | statyka
2
Redukcja i równowaga płaskich układów obciążeń
Równoległy układ sił
siła ogólna S
y
y
n
i
i
S
P
S
e
1
=
=
=
)
(
1
1
=
=
±
=
=
n
i
i
n
i
iy
y
P
P
S
Płaskie układy obciążeń, redukcja i równowaga.
mechanika techniczna | statyka
2
Redukcja i równowaga płaskich układów obciążeń
Równoległy układ sił
moment ogólny
O
M
z
z
n
i
i
i
M
P
r
M
e
O
1
O
O
=
×
=
=
=
±
=
n
i
i
i
z
a
P
M
1
O
)
(
Płaskie układy obciążeń, redukcja i równowaga.
mechanika techniczna | statyka
2
Redukcja i równowaga płaskich układów obciążeń
Równoległy układ sił
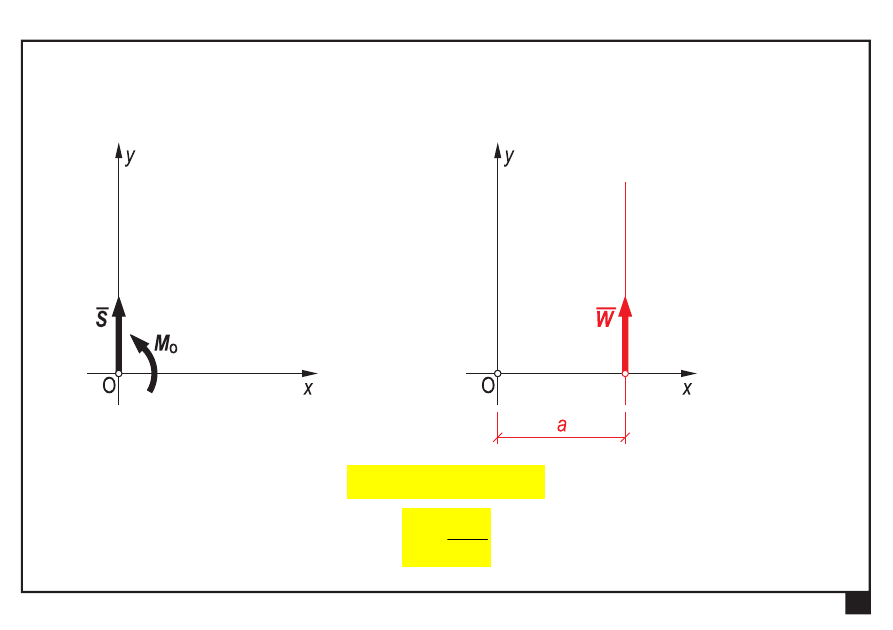
jeśli
0
≠
S
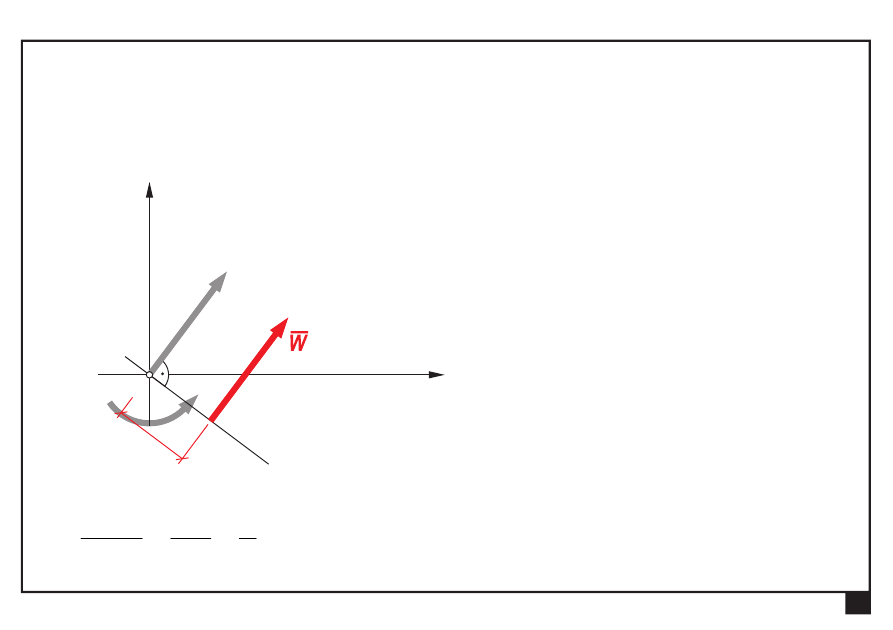
to możemy znaleźć taki
biegun redukcji A, że w wyniku
otrzymamy tylko wypadkową
W
S
W
=
y
y
W
W
e
=
y
y
S
W
=
S
W
=
Płaskie układy obciążeń, redukcja i równowaga.
mechanika techniczna | statyka
2
Redukcja i równowaga płaskich układów obciążeń
Równoległy układ sił
a
S
a
W
M
⋅
=
⋅
=
O
S
M
a
O
=
Płaskie układy obciążeń, redukcja i równowaga.
mechanika techniczna | statyka
2
Redukcja i równowaga płaskich układów obciążeń
Równoległy układ sił
jest w równowadze, jeśli siła ogólna jest równa zeru
i moment ogólny jest równy zeru
0
=
S
,
0
O
=
M
0
=
y
S
0
1
=
=
n
i
iy
P
,
0
)
(
1
=
±
=
n
i
i
P
Suma rzutów sił na oś y jest równa zeru
0
O
=
z
M
0
1
O
=
=
n
i
i
M
,
0
)
(
1
=
±
=
n
i
i
i
a
P
Suma momentów względem punktu O jest równa zeru
2 RRS (dwa równania równowagi statycznej)
Płaskie układy obciążeń, redukcja i równowaga.
mechanika techniczna | statyka
2
Redukcja i równowaga płaskich układów obciążeń
Równoległy układ sił
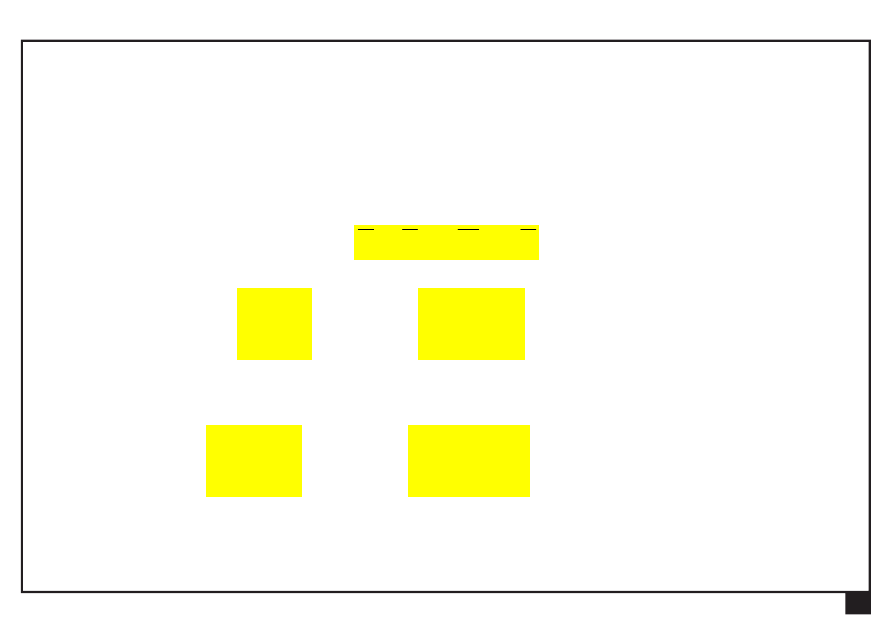
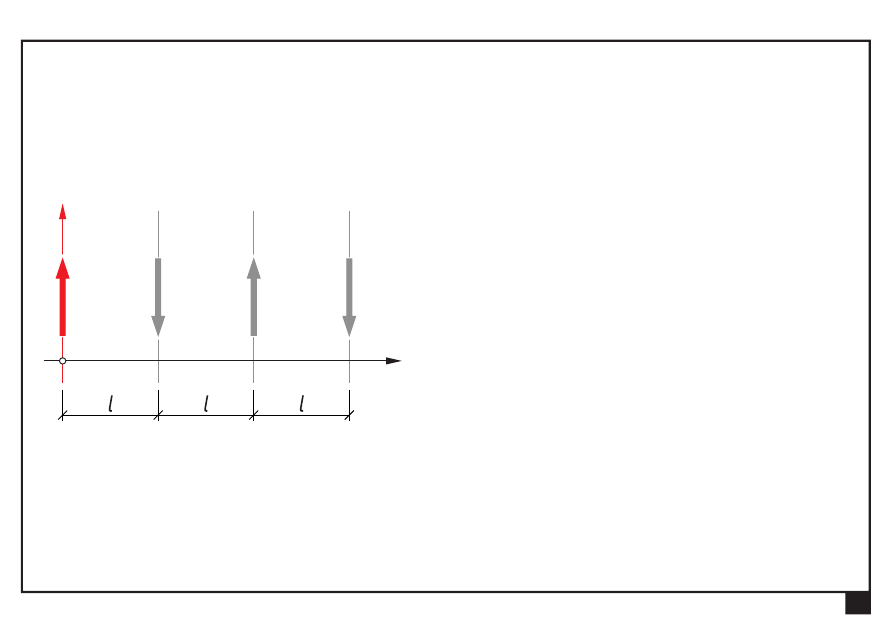
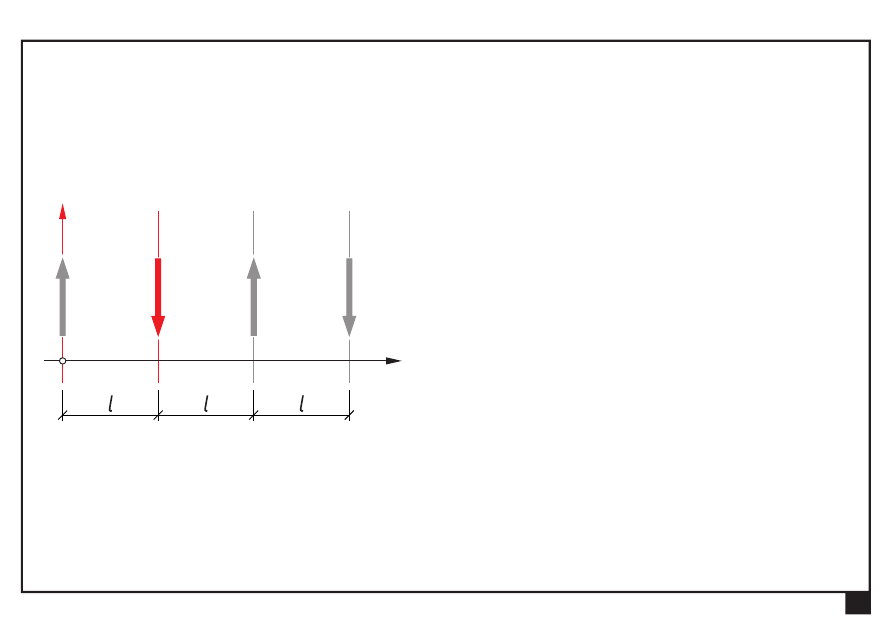
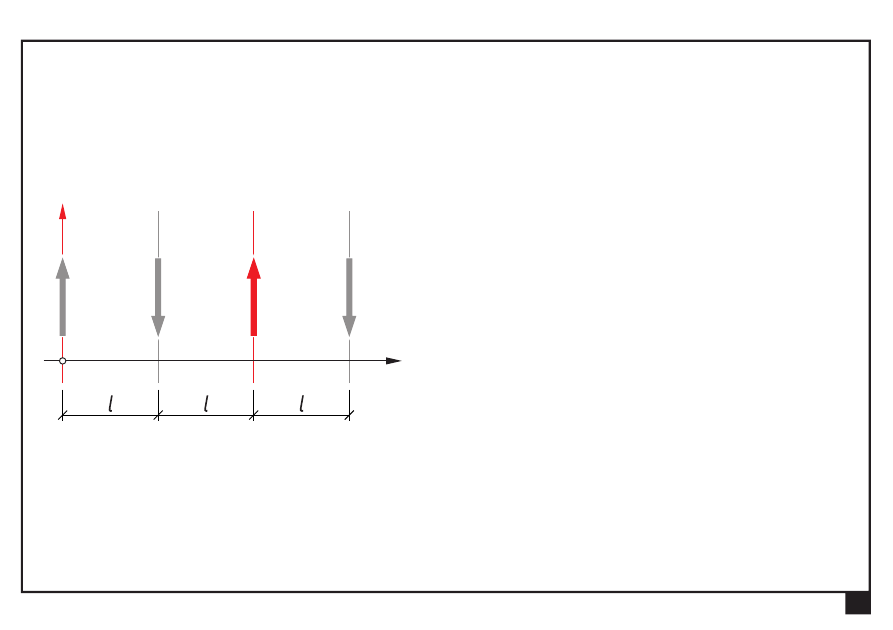
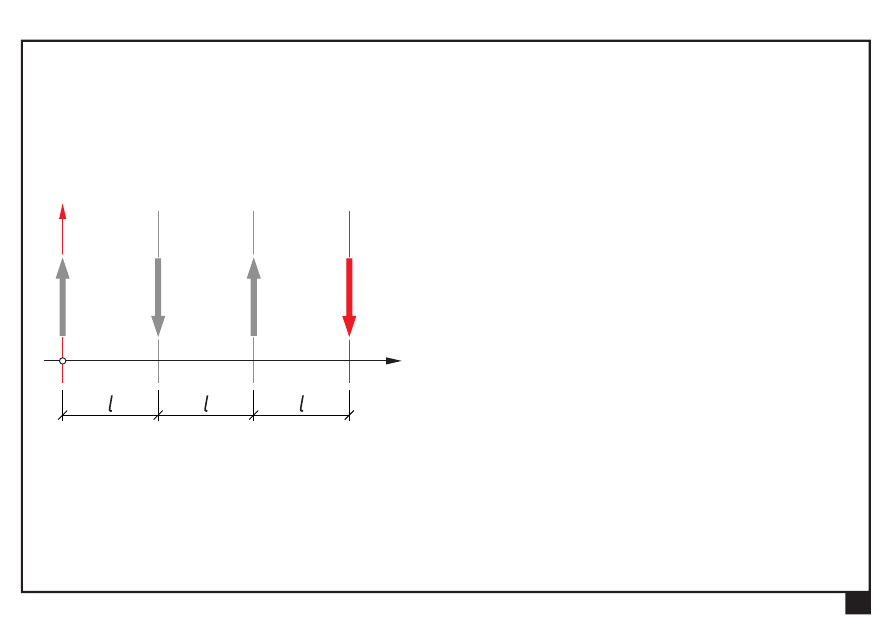
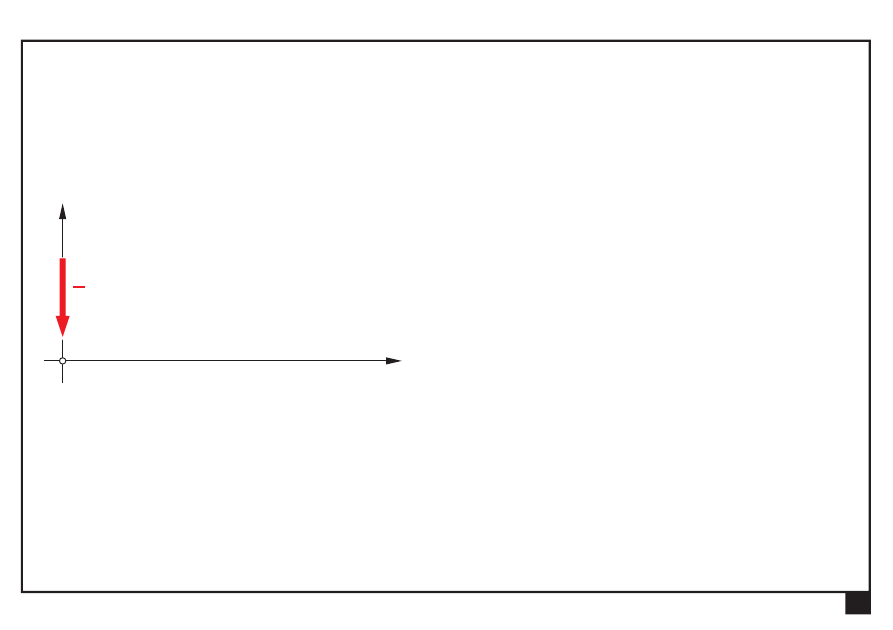
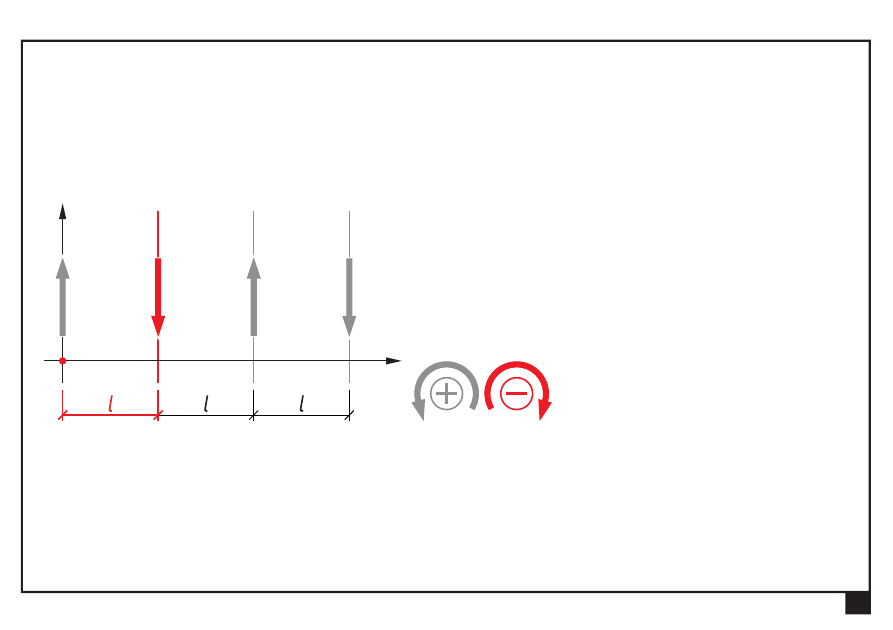
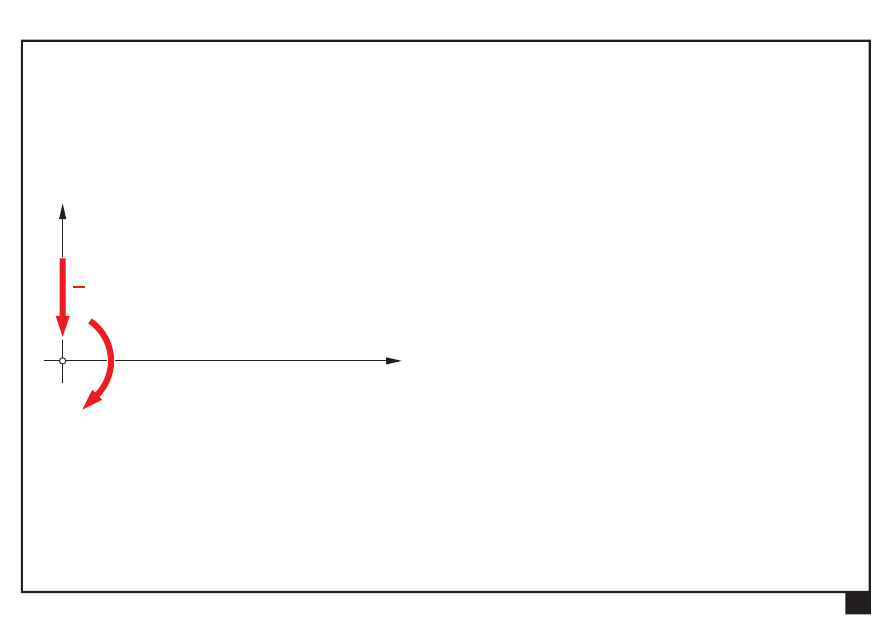
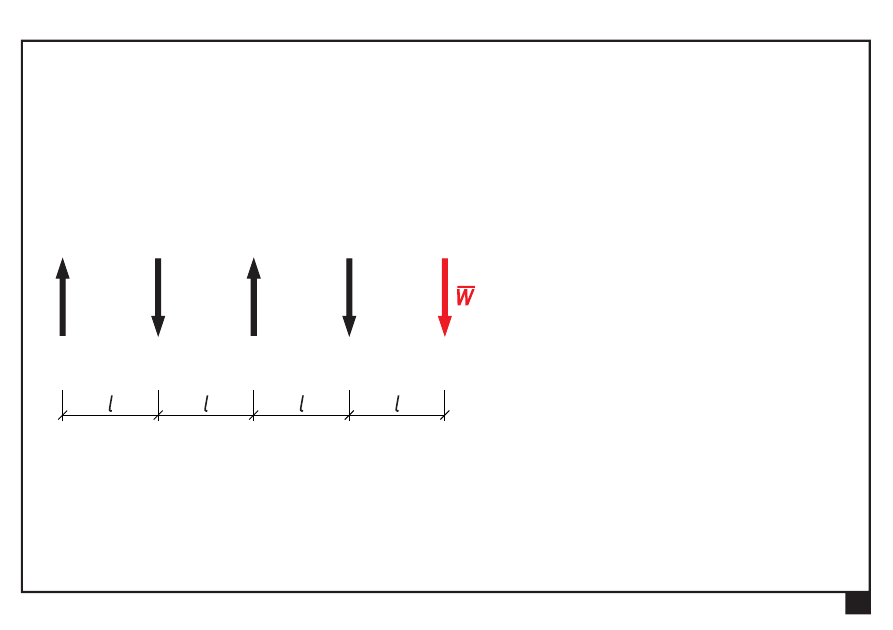
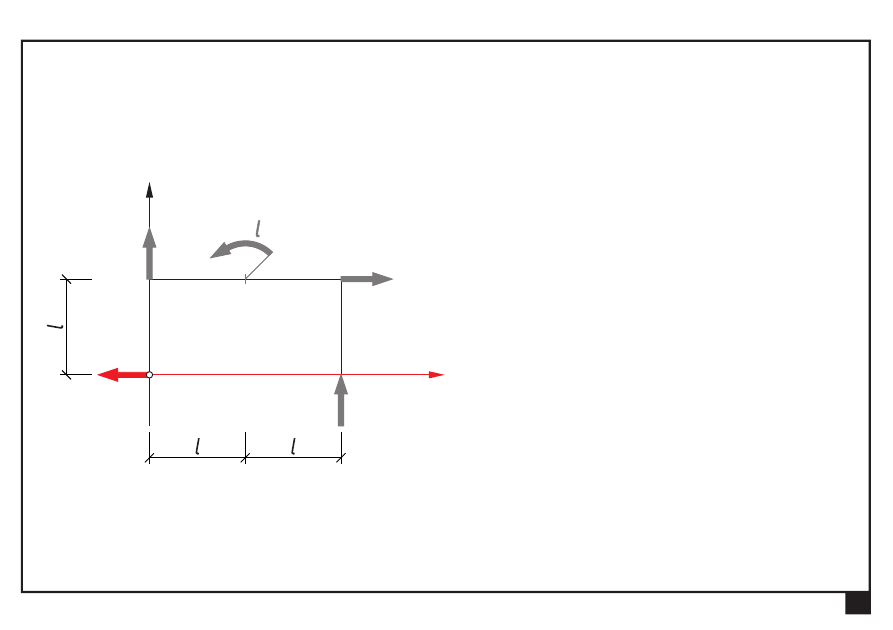
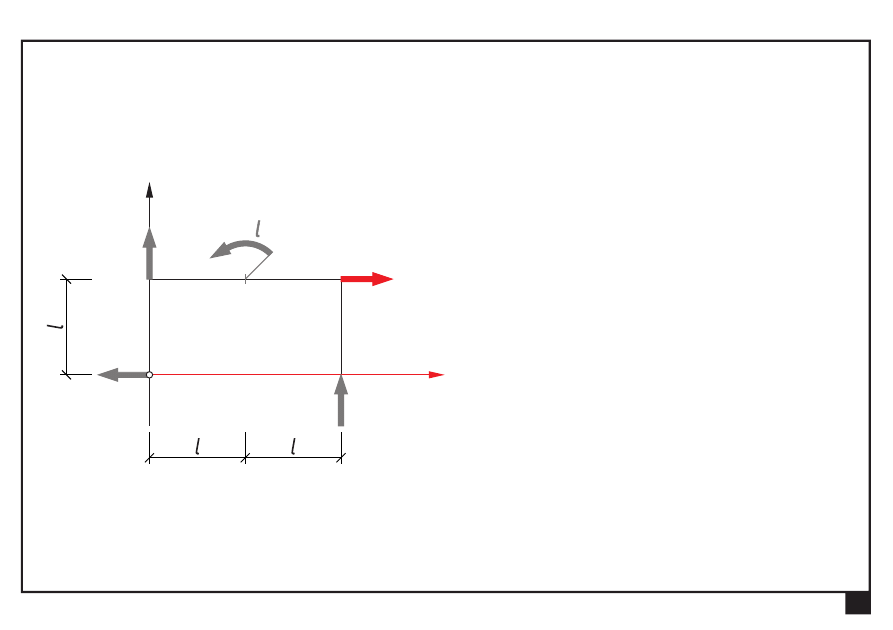
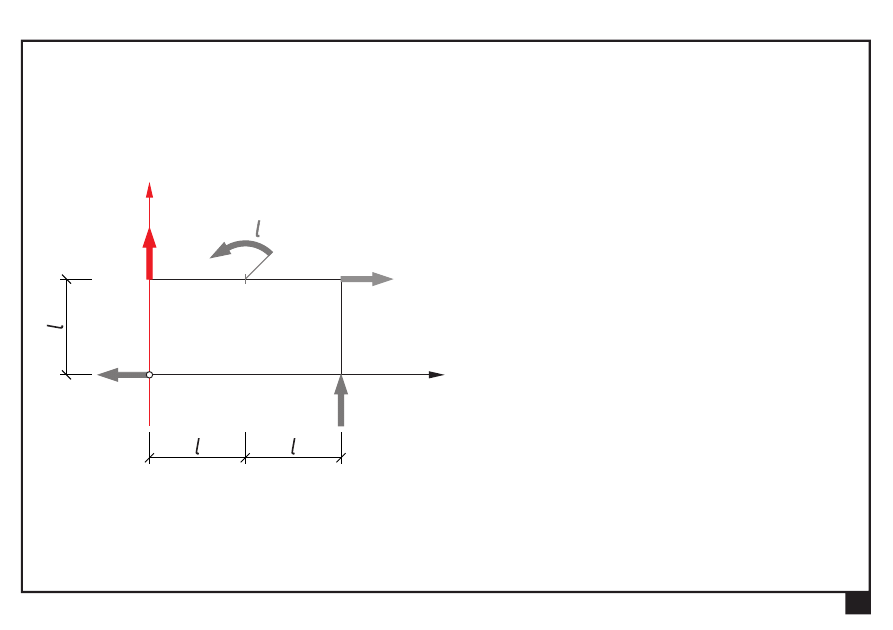
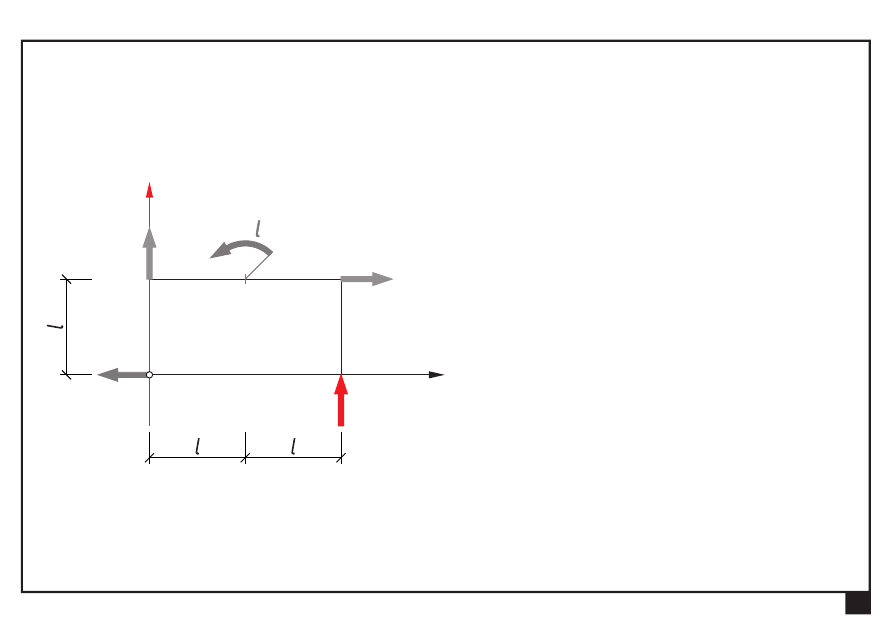
Dokonać redukcji płaskiego równoległego układu sił
3P
4P
P
2P
Płaskie układy obciążeń, redukcja i równowaga.
mechanika techniczna | statyka
2
Redukcja i równowaga płaskich układów obciążeń
Równoległy układ sił
Dokonać redukcji płaskiego równoległego układu sił
3P
4P
P
2P
x
O
y
Układ współrzędnych Oxy obieramy tak, aby oś y pokrywała się
z prostą działania jednej z sił
Płaskie układy obciążeń, redukcja i równowaga.
mechanika techniczna | statyka
2
Redukcja i równowaga płaskich układów obciążeń
Równoległy układ sił
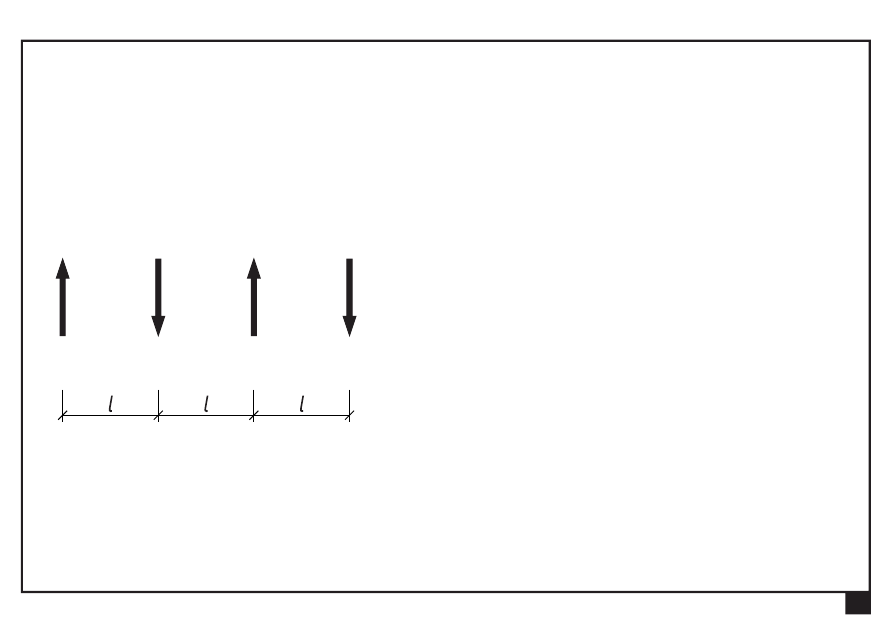
Dokonać redukcji płaskiego równoległego układu sił
3P
4P
P
2P
x
O
y
Proste działania wszystkich sił w układzie są równoległe
Płaskie układy obciążeń, redukcja i równowaga.
mechanika techniczna | statyka
2
Redukcja i równowaga płaskich układów obciążeń
Równoległy układ sił
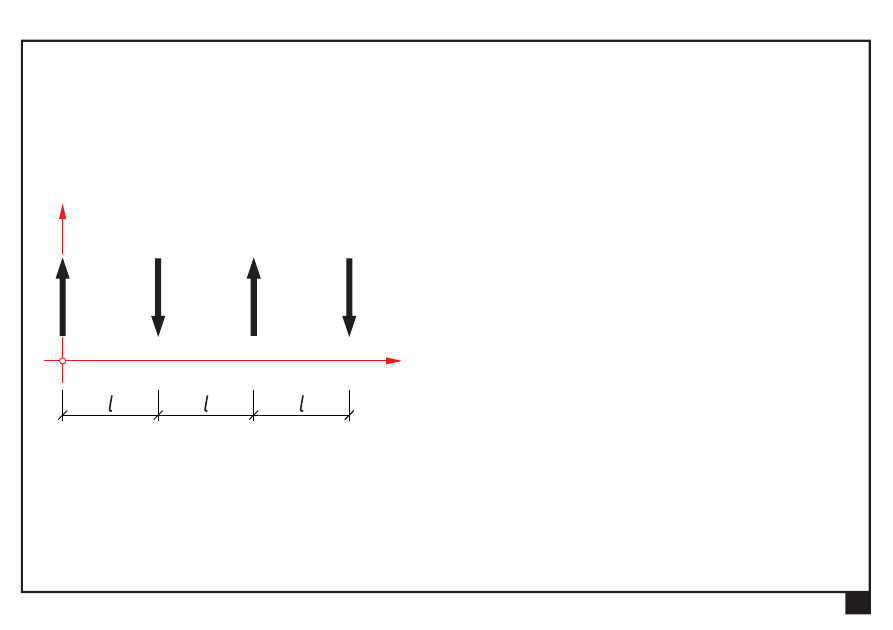
Dokonać redukcji płaskiego równoległego układu sił
3P
4P
P
2P
x
O
y
Wyznaczamy siłę ogólną S = S
y
:
= Σ
=
3
y
iy
S
P
P
Płaskie układy obciążeń, redukcja i równowaga.
mechanika techniczna | statyka
2
Redukcja i równowaga płaskich układów obciążeń
Równoległy układ sił
Dokonać redukcji płaskiego równoległego układu sił
3P
4P
P
2P
x
O
y
Wyznaczamy siłę ogólną S = S
y
:
= Σ
=
−
3
4
y
iy
S
P
P
P
Płaskie układy obciążeń, redukcja i równowaga.
mechanika techniczna | statyka
2
Redukcja i równowaga płaskich układów obciążeń
Równoległy układ sił
Dokonać redukcji płaskiego równoległego układu sił
3P
4P
P
2P
x
O
y
Wyznaczamy siłę ogólną S = S
y
:
= Σ
=
−
+
3
4
y
iy
S
P
P
P P
Płaskie układy obciążeń, redukcja i równowaga.
mechanika techniczna | statyka
2
Redukcja i równowaga płaskich układów obciążeń
Równoległy układ sił
Dokonać redukcji płaskiego równoległego układu sił
3P
4P
P
2P
x
O
y
Wyznaczamy siłę ogólną S = S
y
:
= Σ
=
−
+ −
=
3
4
2
y
iy
S
P
P
P P
P
Płaskie układy obciążeń, redukcja i równowaga.
mechanika techniczna | statyka
2
Redukcja i równowaga płaskich układów obciążeń
Równoległy układ sił
Dokonać redukcji płaskiego równoległego układu sił
S
x
O
y
Wyznaczamy siłę ogólną S = S
y
:
= Σ
=
−
+ −
= −
3
4
2
2
y
iy
S
P
P
P P
P
P
Płaskie układy obciążeń, redukcja i równowaga.
mechanika techniczna | statyka
2
Redukcja i równowaga płaskich układów obciążeń
Równoległy układ sił
Dokonać redukcji płaskiego równoległego układu sił
3P
4P
P
2P
x
O
y
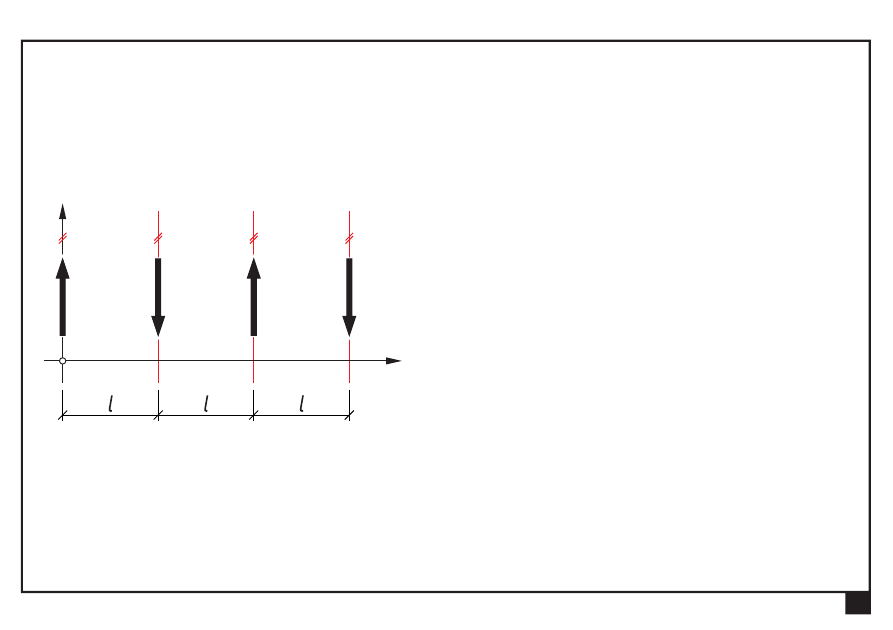
Wyznaczamy moment ogólny M
O
:
= Σ
= −
⋅
O
O
4
i
M
M
P l
Płaskie układy obciążeń, redukcja i równowaga.
mechanika techniczna | statyka
2
Redukcja i równowaga płaskich układów obciążeń
Równoległy układ sił
Dokonać redukcji płaskiego równoległego układu sił
3P
4P
P
2P
x
O
y
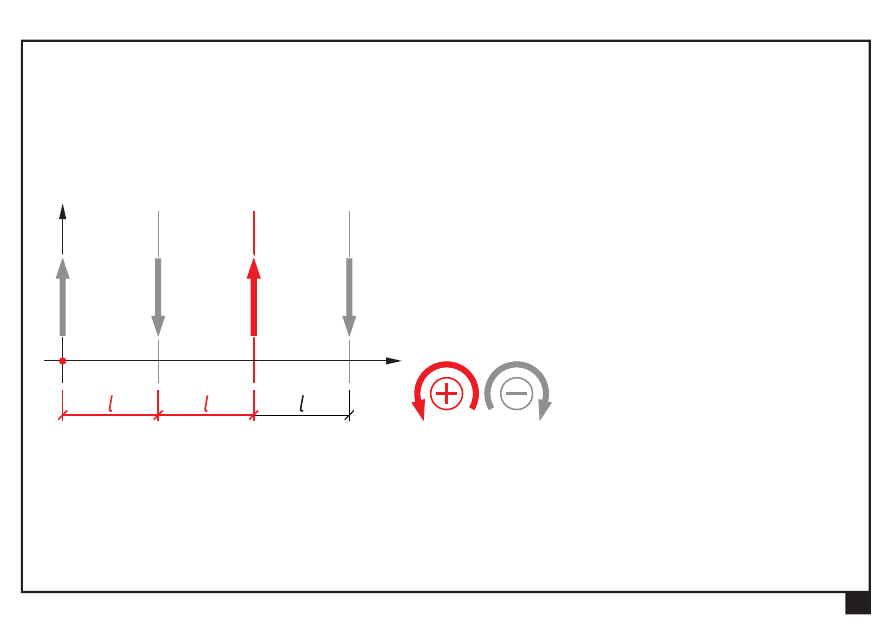
Wyznaczamy moment ogólny M
O
:
= Σ
= −
⋅ + ⋅
O
O
4
2
i
M
M
P l P
l
Płaskie układy obciążeń, redukcja i równowaga.
mechanika techniczna | statyka
2
Redukcja i równowaga płaskich układów obciążeń
Równoległy układ sił
Dokonać redukcji płaskiego równoległego układu sił
3P
4P
P
2P
x
O
y
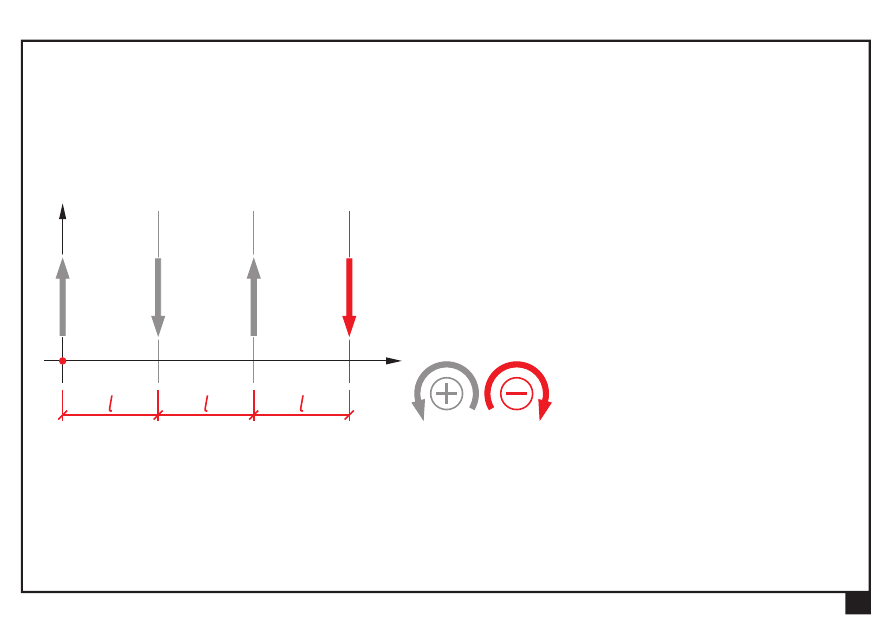
Wyznaczamy moment ogólny M
O
:
= Σ
= −
⋅ + ⋅ −
⋅
=
O
O
4
2
2
3
i
M
M
P l P
l
P
l
Płaskie układy obciążeń, redukcja i równowaga.
mechanika techniczna | statyka
2
Redukcja i równowaga płaskich układów obciążeń
Równoległy układ sił
Dokonać redukcji płaskiego równoległego układu sił
x
O
y
M
O
Wyznaczamy moment ogólny M
O
:
= Σ
= −
⋅ + ⋅ −
⋅
= −
O
O
4
2
2
3
8
i
M
M
P l P
l
P
l
Pl
Płaskie układy obciążeń, redukcja i równowaga.
mechanika techniczna | statyka
2
Redukcja i równowaga płaskich układów obciążeń
Równoległy układ sił
Dokonać redukcji płaskiego równoległego układu sił
S
x
O
y
M
O
Pośredni wynik redukcji do siły ogólnej S i momentu ogólnego M
O
Płaskie układy obciążeń, redukcja i równowaga.
mechanika techniczna | statyka
2
Redukcja i równowaga płaskich układów obciążeń
Równoległy układ sił
Dokonać redukcji płaskiego równoległego układu sił
x
O
y
a
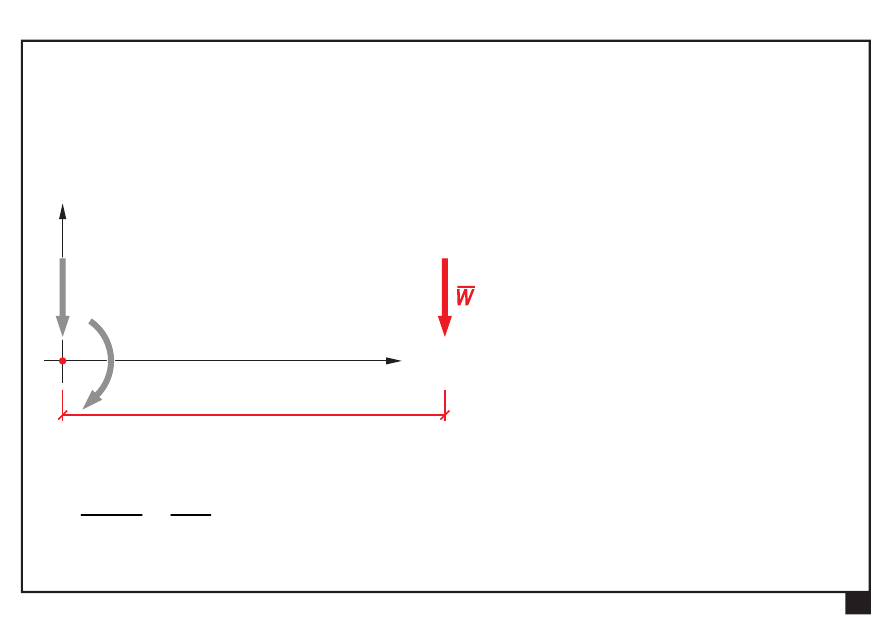
Odsuwamy siłę ogólną od bieguna O na odległość a
=
=
=
O
|
| 8
4
| |
2
M
Pl
a
l
S
P
oraz
=
W
S
Płaskie układy obciążeń, redukcja i równowaga.
mechanika techniczna | statyka
2
Redukcja i równowaga płaskich układów obciążeń
Równoległy układ sił
Dokonać redukcji płaskiego równoległego układu sił
3P
4P
P
2P
Wynik końcowy redukcji
Płaskie układy obciążeń, redukcja i równowaga.
mechanika techniczna | statyka
2
Redukcja i równowaga płaskich układów obciążeń
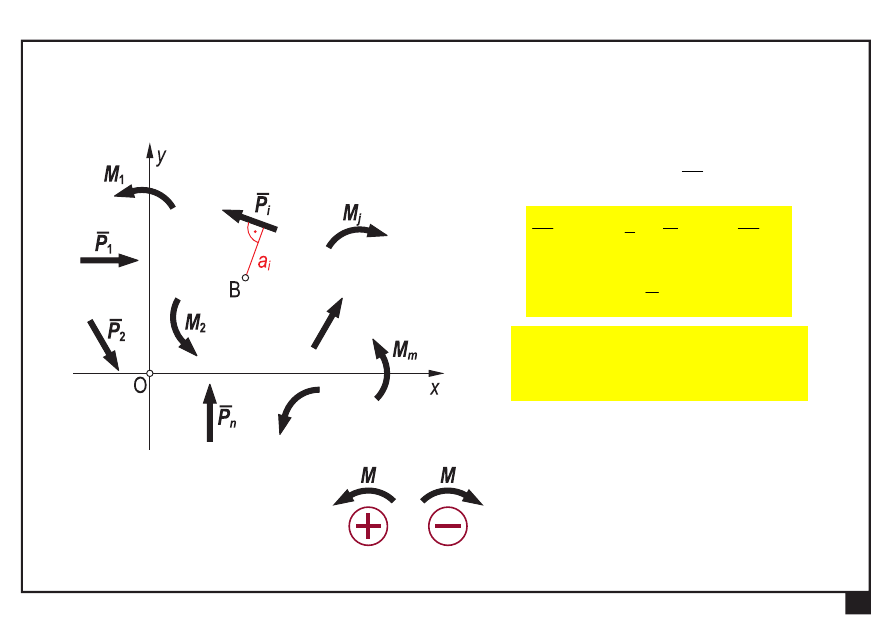
Dowolny układ obciążeń w płaszczyźnie xy
Płaskie układy obciążeń, redukcja i równowaga.
mechanika techniczna | statyka
2
Redukcja i równowaga płaskich układów obciążeń
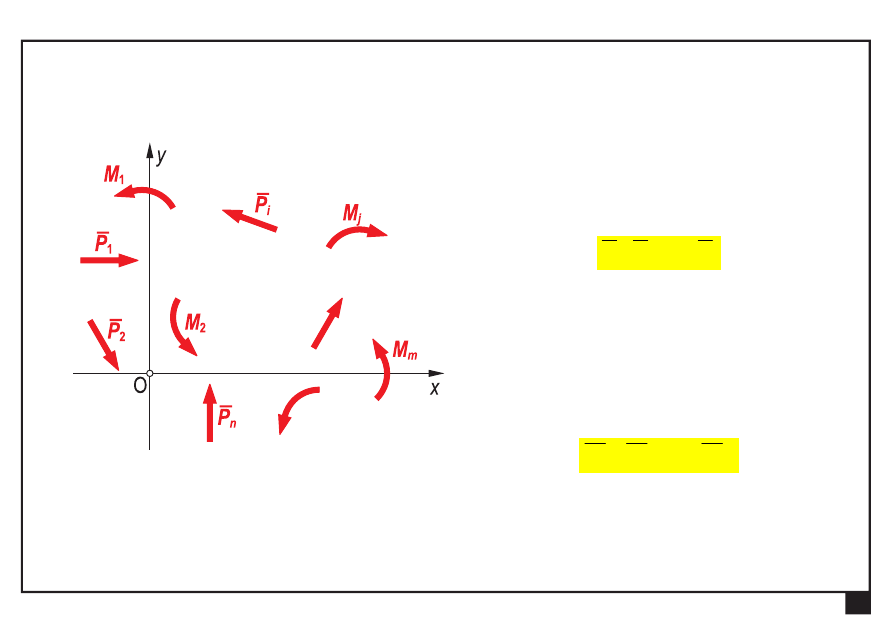
Dowolny układ obciążeń w płaszczyźnie xy
zbiór sił
(wektory liniowe)
n
P
P
P
...,
,
,
2
1
i/lub
momentów par sił
(wektory swobodne)
m
M
M
M
...,
,
,
2
1
Płaskie układy obciążeń, redukcja i równowaga.
mechanika techniczna | statyka
2
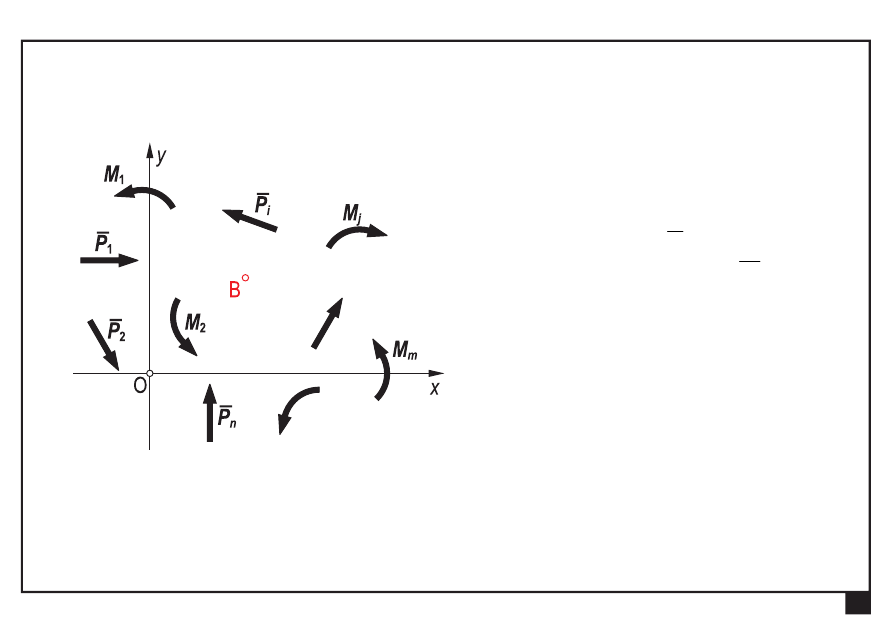
Redukcja i równowaga płaskich układów obciążeń
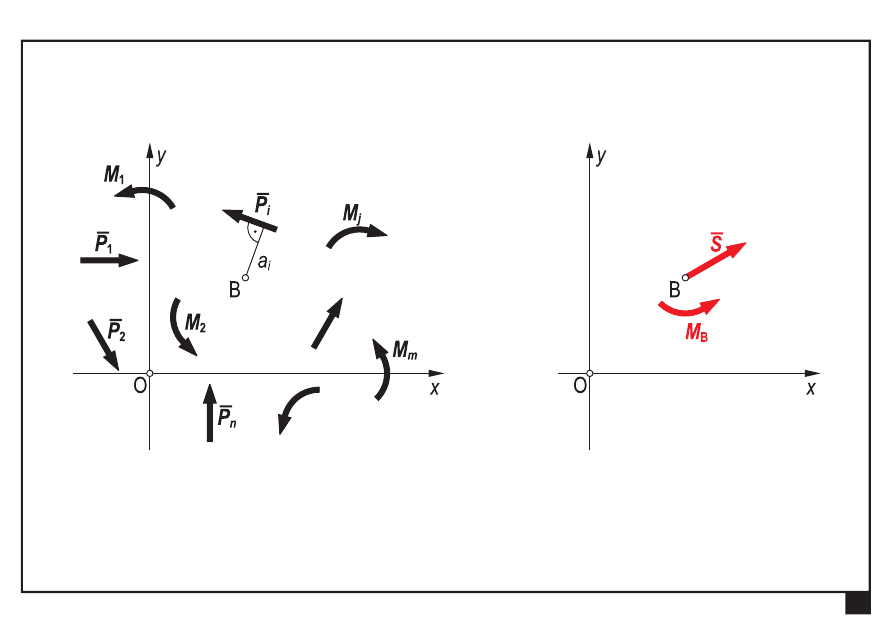
Dowolny układ obciążeń w płaszczyźnie xy
redukuje się wstępnie
do bieguna B,
do siły ogólnej S
i momentu ogólnego
O
M
Płaskie układy obciążeń, redukcja i równowaga.
mechanika techniczna | statyka
2
Redukcja i równowaga płaskich układów obciążeń
Dowolny układ obciążeń w płaszczyźnie xy
siła ogólna S
y
y
x
x
n
i
i
S
S
P
S
e
e
1
+
=
=
=
=
=
n
i
ix
x
P
S
1
=
=
n
i
iy
y
P
S
1
Płaskie układy obciążeń, redukcja i równowaga.
mechanika techniczna | statyka
2
Redukcja i równowaga płaskich układów obciążeń
Dowolny układ obciążeń w płaszczyźnie xy
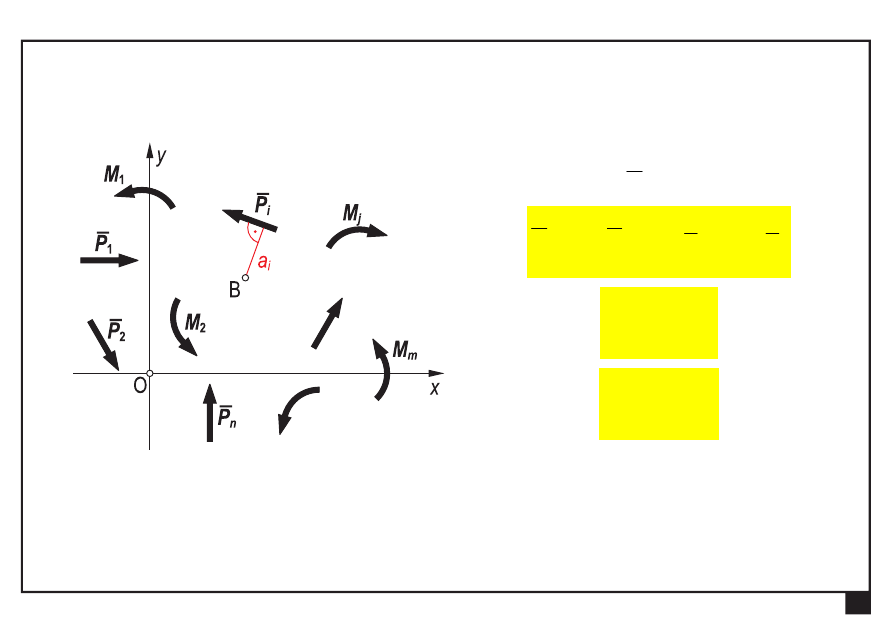
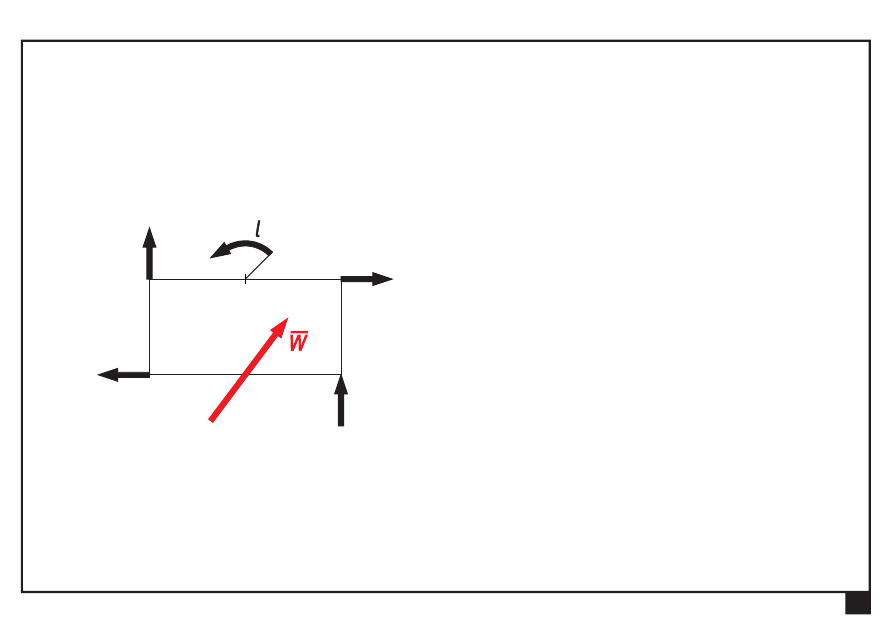
moment ogólny
B
M
z
z
m
j
j
n
i
i
i
M
M
P
r
M
e
B
1
1
B
=
=
+
×
=
=
=
=
=
±
+
±
=
m
j
j
n
i
i
i
z
M
a
P
M
1
1
B
)
(
)
(
Płaskie układy obciążeń, redukcja i równowaga.
mechanika techniczna | statyka
2
Redukcja i równowaga płaskich układów obciążeń
Dowolny układ obciążeń w płaszczyźnie xy
Płaskie układy obciążeń, redukcja i równowaga.
mechanika techniczna | statyka
2
Redukcja i równowaga płaskich układów obciążeń
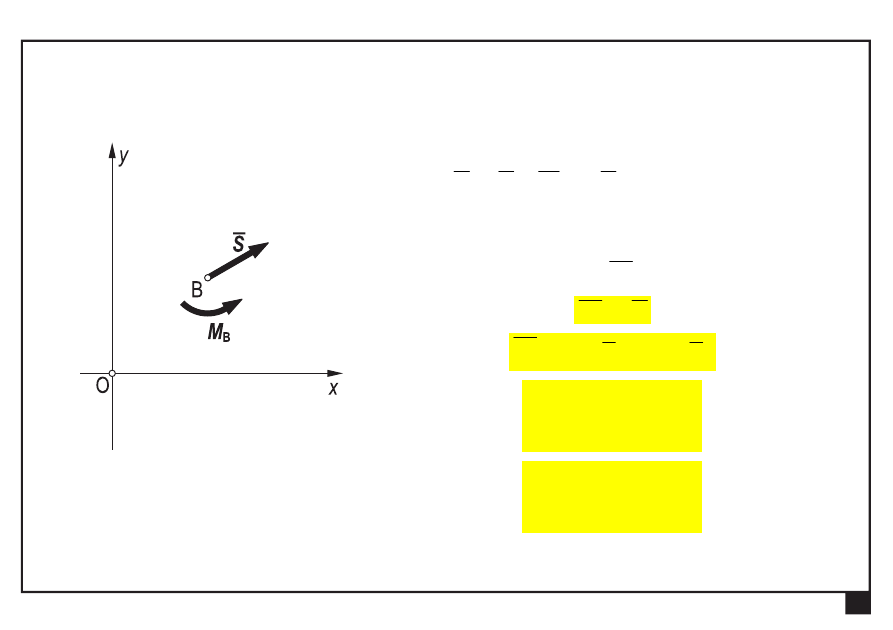
Dowolny układ obciążeń w płaszczyźnie xy
jeśli
0
≠
S
,
0
B
≠
M
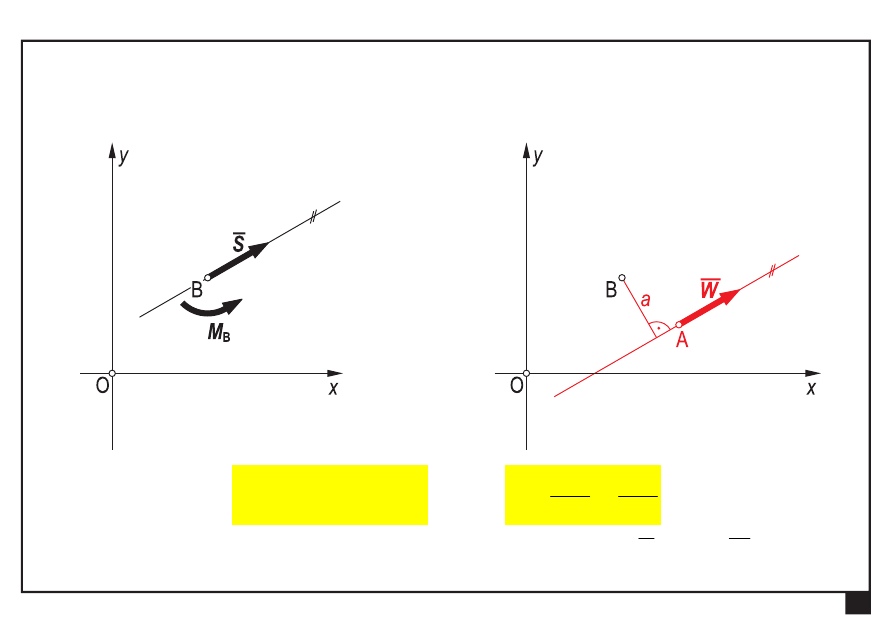
to można
wyznaczyć taki biegun redukcji A,
że w wyniku otrzymamy
tylko wypadkową
W
S
W
=
y
y
x
x
W
W
W
e
e
+
=
=
=
=
n
i
ix
x
x
P
S
W
1
=
=
=
n
i
iy
y
y
P
S
W
1
Płaskie układy obciążeń, redukcja i równowaga.
mechanika techniczna | statyka
2
Redukcja i równowaga płaskich układów obciążeń
Dowolny układ obciążeń w płaszczyźnie xy
a
S
a
W
M
⋅
=
⋅
=
B
S
M
W
M
a
B
B
=
=
odległość a odkładamy z uwzględnieniem zwrotów S oraz
B
M
Płaskie układy obciążeń, redukcja i równowaga.
mechanika techniczna | statyka
2
Redukcja i równowaga płaskich układów obciążeń
Dowolny układ obciążeń w płaszczyźnie xy
jest w równowadze, jeśli siła ogólna jest równa zeru
i moment ogólny jest równy zeru
0
=
S
,
0
B
=
M
0
=
x
S
0
1
=
=
n
i
ix
P
Suma rzutów sił na oś x jest równa zeru
0
=
y
S
0
1
=
=
n
i
iy
P
Suma rzutów sił na oś y jest równa zeru
Płaskie układy obciążeń, redukcja i równowaga.
mechanika techniczna | statyka
2
Redukcja i równowaga płaskich układów obciążeń
Dowolny układ obciążeń w płaszczyźnie xy
jest w równowadze, jeśli siła ogólna jest równa zeru
i moment ogólny jest równy zeru
0
=
S
,
0
B
=
M
0
B
B
=
=
z
M
M
0
1
B
=
=
n
i
i
M
,
0
)
(
)
(
1
1
=
±
+
±
=
=
m
j
j
n
i
i
i
M
a
P
Suma momentów względem punktu B jest równa zeru
3 RRS (trzy równania równowagi statycznej)
Płaskie układy obciążeń, redukcja i równowaga.
mechanika techniczna | statyka
2
Redukcja i równowaga płaskich układów obciążeń
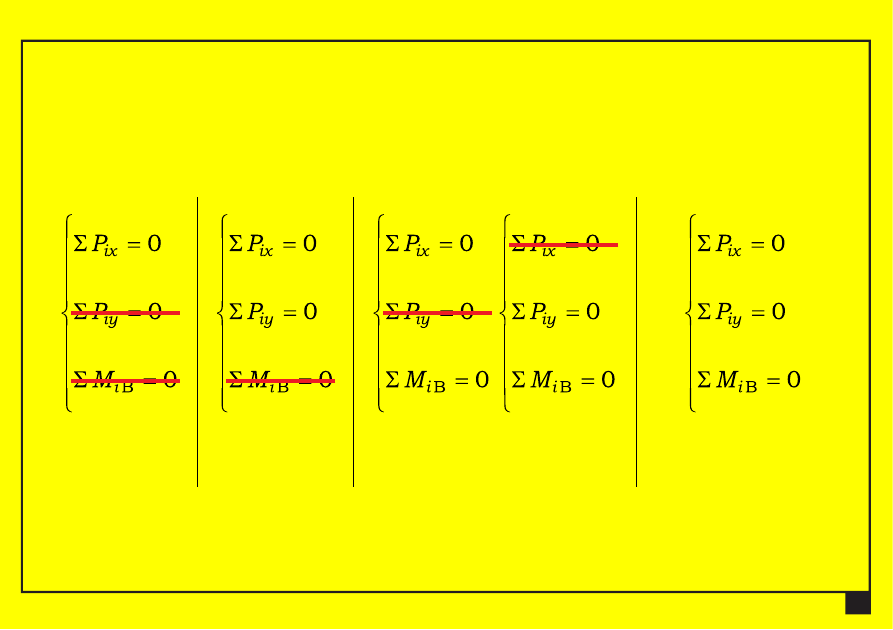
Dowolny układ obciążeń w płaszczyźnie xy
jest w równowadze, jeśli
suma rzutów sił na oś x
jest równa zeru
suma rzutów sił na oś y
jest równa zeru
suma momentów względem
dowolnego punktu jest równa zeru
1
1
B
1
0
0
0
n
ix
i
n
iy
i
n
i
i
P
P
M
=
=
=
=
=
=
B
0
0
0
ix
iy
i
P
P
M
Σ
=
Σ
=
Σ
=
B
0
0
0
X
Y
M
Σ
=
Σ =
Σ
=
3 RRS (trzy równania równowagi statycznej)
Płaskie układy obciążeń, redukcja i równowaga.
mechanika techniczna | statyka
2
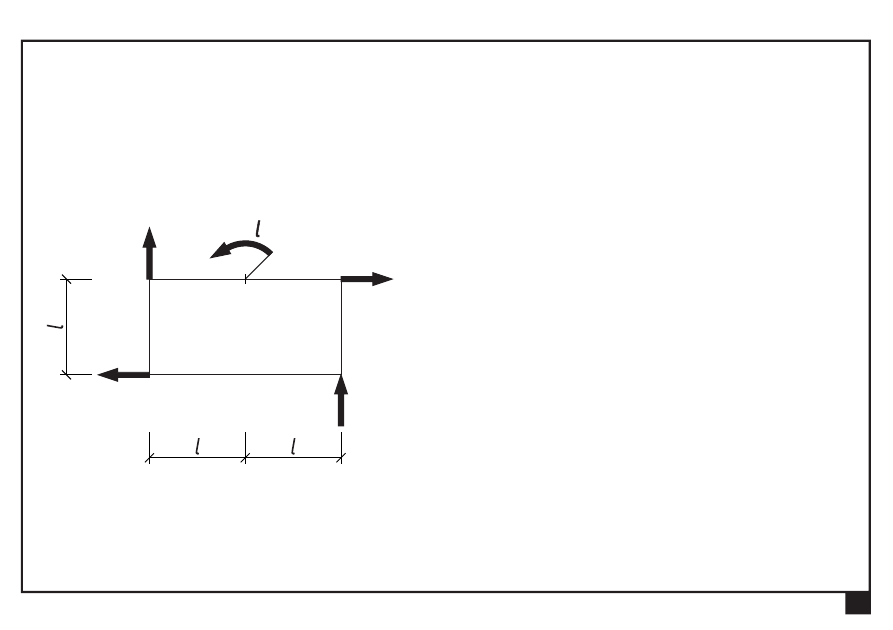
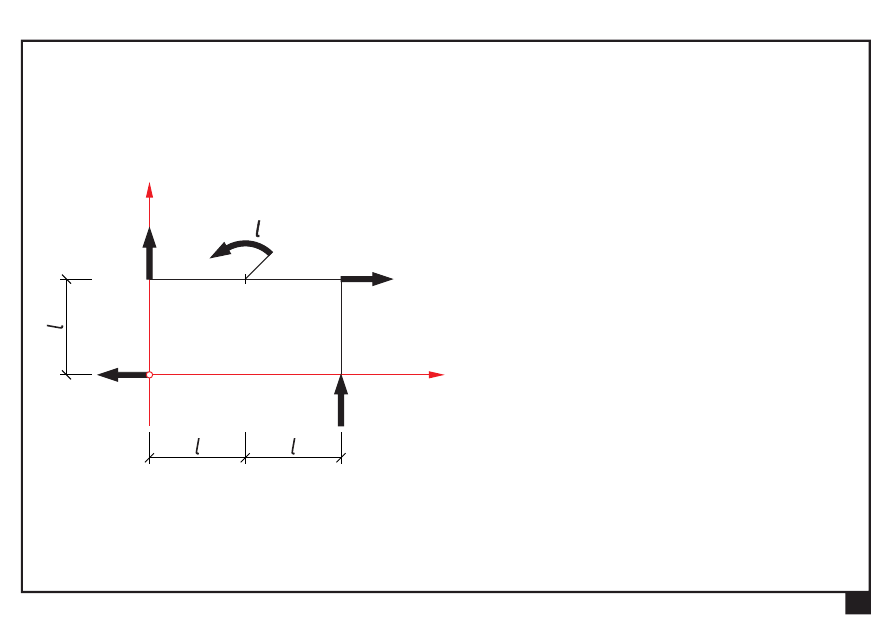
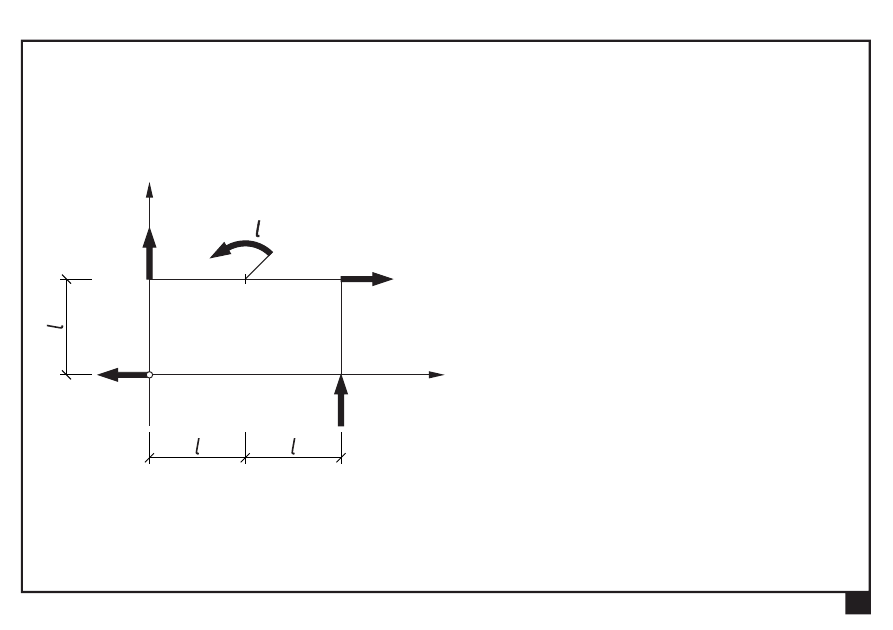
Redukcja i równowaga płaskich układów obciążeń
Do rozwiązywania dowolnych płaskich układów obciążeń
można wykorzystać różne kombinacje
3RRS
, np.:
B
0
0
0
ix
iy
i
P
P
M
Σ
=
Σ
=
Σ
=
A
B
0
0
0
ix
i
i
P
M
M
Σ
=
Σ
=
Σ
=
A
B
0
0
0
iy
i
i
P
M
M
Σ
=
Σ
=
Σ
=
A
B
C
0
0
0
i
i
i
M
M
M
Σ
=
Σ
=
Σ
=
przy czym punkty A, B i C nie mogą być współliniowe
Płaskie układy obciążeń, redukcja i równowaga.
mechanika techniczna | statyka
2
Redukcja i równowaga płaskich układów obciążeń
Pamiętając
3RRS
można rozwiązać każdy z poznanych
płaskich układów sił lub obciążeń
kolinearny
układ sił
zbieżny
układ sił
równoległy
układ sił
dowolny
układ obciążeń
Rachunek wektorowy. Pojęcia podstawowe. Aksjomaty statyki.
mechanika techniczna | statyka
2
Redukcja i równowaga płaskich układów obciążeń
Dowolny układ obciążeń w płaszczyźnie xy
Dokonać redukcji płaskiego dowolnego układu obciążeń
3P
4P
P
2P
P
Rachunek wektorowy. Pojęcia podstawowe. Aksjomaty statyki.
mechanika techniczna | statyka
2
Redukcja i równowaga płaskich układów obciążeń
Dowolny układ obciążeń w płaszczyźnie xy
Dokonać redukcji płaskiego dowolnego układu obciążeń
3P
4P
P
2P
x
y
O
P
Obieramy układ współrzędnych Oxy
Rachunek wektorowy. Pojęcia podstawowe. Aksjomaty statyki.
mechanika techniczna | statyka
2
Redukcja i równowaga płaskich układów obciążeń
Dowolny układ obciążeń w płaszczyźnie xy
Dokonać redukcji płaskiego dowolnego układu obciążeń
P
3P
4P
P
2P
x
y
O
Wyznaczamy składowe S
x
, S
y
siły ogólnej S:
Rachunek wektorowy. Pojęcia podstawowe. Aksjomaty statyki.
mechanika techniczna | statyka
2
Redukcja i równowaga płaskich układów obciążeń
Dowolny układ obciążeń w płaszczyźnie xy
Dokonać redukcji płaskiego dowolnego układu obciążeń
P
3P
4P
P
2P
x
y
O
Wyznaczamy składowe S
x
, S
y
siły ogólnej S:
= Σ
= −
x
ix
S
P
P
Rachunek wektorowy. Pojęcia podstawowe. Aksjomaty statyki.
mechanika techniczna | statyka
2
Redukcja i równowaga płaskich układów obciążeń
Dowolny układ obciążeń w płaszczyźnie xy
Dokonać redukcji płaskiego dowolnego układu obciążeń
P
3P
4P
P
2P
x
y
O
Wyznaczamy składowe S
x
, S
y
siły ogólnej S:
= Σ
= − +
=
4
3
x
ix
S
P
P
P
P
Rachunek wektorowy. Pojęcia podstawowe. Aksjomaty statyki.
mechanika techniczna | statyka
2
Redukcja i równowaga płaskich układów obciążeń
Dowolny układ obciążeń w płaszczyźnie xy
Dokonać redukcji płaskiego dowolnego układu obciążeń
P
3P
4P
P
2P
x
y
O
Wyznaczamy składowe S
x
, S
y
siły ogólnej S:
= Σ
=
y
iy
S
P
P
Rachunek wektorowy. Pojęcia podstawowe. Aksjomaty statyki.
mechanika techniczna | statyka
2
Redukcja i równowaga płaskich układów obciążeń
Dowolny układ obciążeń w płaszczyźnie xy
Dokonać redukcji płaskiego dowolnego układu obciążeń
P
3P
4P
P
2P
x
y
O
Wyznaczamy składowe S
x
, S
y
siły ogólnej S:
= Σ
= +
=
3
4
y
iy
S
P
P
P
P
Rachunek wektorowy. Pojęcia podstawowe. Aksjomaty statyki.
mechanika techniczna | statyka
2
Redukcja i równowaga płaskich układów obciążeń
Dowolny układ obciążeń w płaszczyźnie xy
Dokonać redukcji płaskiego dowolnego układu obciążeń
x
y
O
Składowe S
x
, S
y
siły ogólnej S są równe:
=3
x
S
P
,
= 4
y
S
P
Rachunek wektorowy. Pojęcia podstawowe. Aksjomaty statyki.
mechanika techniczna | statyka
2
Redukcja i równowaga płaskich układów obciążeń
Dowolny układ obciążeń w płaszczyźnie xy
Dokonać redukcji płaskiego dowolnego układu obciążeń
x
y
O
α
Wyznaczamy siłę ogólną S i kąt nachylenia:
=
+
=
+
=
2
2
2
2
(
)
( )
(3 )
(4 )
5
x
y
S
S
S
P
P
P
Rachunek wektorowy. Pojęcia podstawowe. Aksjomaty statyki.
mechanika techniczna | statyka
2
Redukcja i równowaga płaskich układów obciążeń
Dowolny układ obciążeń w płaszczyźnie xy
Dokonać redukcji płaskiego dowolnego układu obciążeń
x
y
O
α
Wyznaczamy siłę ogólną S i kąt nachylenia:
α
=
=
≈
°
arctg (
) arctg (4 /3) 53,13
y
x
S S
Rachunek wektorowy. Pojęcia podstawowe. Aksjomaty statyki.
mechanika techniczna | statyka
2
Redukcja i równowaga płaskich układów obciążeń
Dowolny układ obciążeń w płaszczyźnie xy
Dokonać redukcji płaskiego dowolnego układu obciążeń
P
3P
4P
P
2P
x
y
O
Wyznaczamy moment ogólny M
O
:
= Σ
=
⋅
O
O
3
2
i
M
M
P
l
Rachunek wektorowy. Pojęcia podstawowe. Aksjomaty statyki.
mechanika techniczna | statyka
2
Redukcja i równowaga płaskich układów obciążeń
Dowolny układ obciążeń w płaszczyźnie xy
Dokonać redukcji płaskiego dowolnego układu obciążeń
P
3P
4P
P
2P
x
y
O
Wyznaczamy moment ogólny M
O
:
= Σ
=
⋅ −
⋅
O
O
3
2
4
i
M
M
P
l
P l
Rachunek wektorowy. Pojęcia podstawowe. Aksjomaty statyki.
mechanika techniczna | statyka
2
Redukcja i równowaga płaskich układów obciążeń
Dowolny układ obciążeń w płaszczyźnie xy
Dokonać redukcji płaskiego dowolnego układu obciążeń
P
3P
4P
P
2P
x
y
O
Wyznaczamy moment ogólny M
O
:
= Σ
=
⋅ −
⋅ +
=
O
O
3
2
4
2
4
i
M
M
P
l
P l
Pl
Pl
Rachunek wektorowy. Pojęcia podstawowe. Aksjomaty statyki.
mechanika techniczna | statyka
2
Redukcja i równowaga płaskich układów obciążeń
Dowolny układ obciążeń w płaszczyźnie xy
Dokonać redukcji płaskiego dowolnego układu obciążeń
x
y
O
M
O
Pośredni wynik redukcji do siły ogólnej S i momentu ogólnego M
O
Rachunek wektorowy. Pojęcia podstawowe. Aksjomaty statyki.
mechanika techniczna | statyka
2
Redukcja i równowaga płaskich układów obciążeń
Dowolny układ obciążeń w płaszczyźnie xy
Dokonać redukcji płaskiego dowolnego układu obciążeń
x
y
O
a
Odsuwamy siłę ogólną od bieguna O na odległość a
=
=
=
O
|
| 4
4
| |
5
5
M
Pl
a
l
S
P
oraz
=
W
S
Rachunek wektorowy. Pojęcia podstawowe. Aksjomaty statyki.
mechanika techniczna | statyka
2
Redukcja i równowaga płaskich układów obciążeń
Dowolny układ obciążeń w płaszczyźnie xy
Dokonać redukcji płaskiego dowolnego układu obciążeń
3P
4P
P
2P
P
Końcowy wynik redukcji
Rachunek wektorowy. Pojęcia podstawowe. Aksjomaty statyki.
mechanika techniczna | statyka
2
Bibliografia
Klasztorny M., Niezgoda T., Mechanika ogólna. Podstawy teoretyczne,
zadania z rozwiązaniami
, OW PW, Warszawa 2006.
Klasztorny M., Mechanika ogólna, DWE, Wrocław 2005.
Wyszukiwarka
Podobne podstrony:
61 MT 02 Kolka profilowane
60 MT 02 Odbiornik sieciowy
59 MT 02 Czarodziejska szkatula
59 MT 02 Lamiglowka warsztatowa
63 MT 02 Lamiglowka
62 MT 02 Wykrawacz uniwersalny
60 MT 02 Wyroby z drutu
58 MT 02 Stabilizator napiecia
59 MT 02 Na wszystko jest sposób
58 MT 02 Przechowywanie negatywow
61 MT 02 Miniaturowy odbiornik
65 MT 02 Usprawnienia warsztatowe
59 MT 02 Próbnik
mt 02
59 MT 02 Oprawa piły
64 MT 02 Drut
62 MT 02 Podzespoly radiotechniczne
61 MT 02 Ciecie szkla
MT 02 1999 Hybrydowa Toyota
więcej podobnych podstron