Napędy Elektryczne
Studium Podyplomowe - Mechatronika
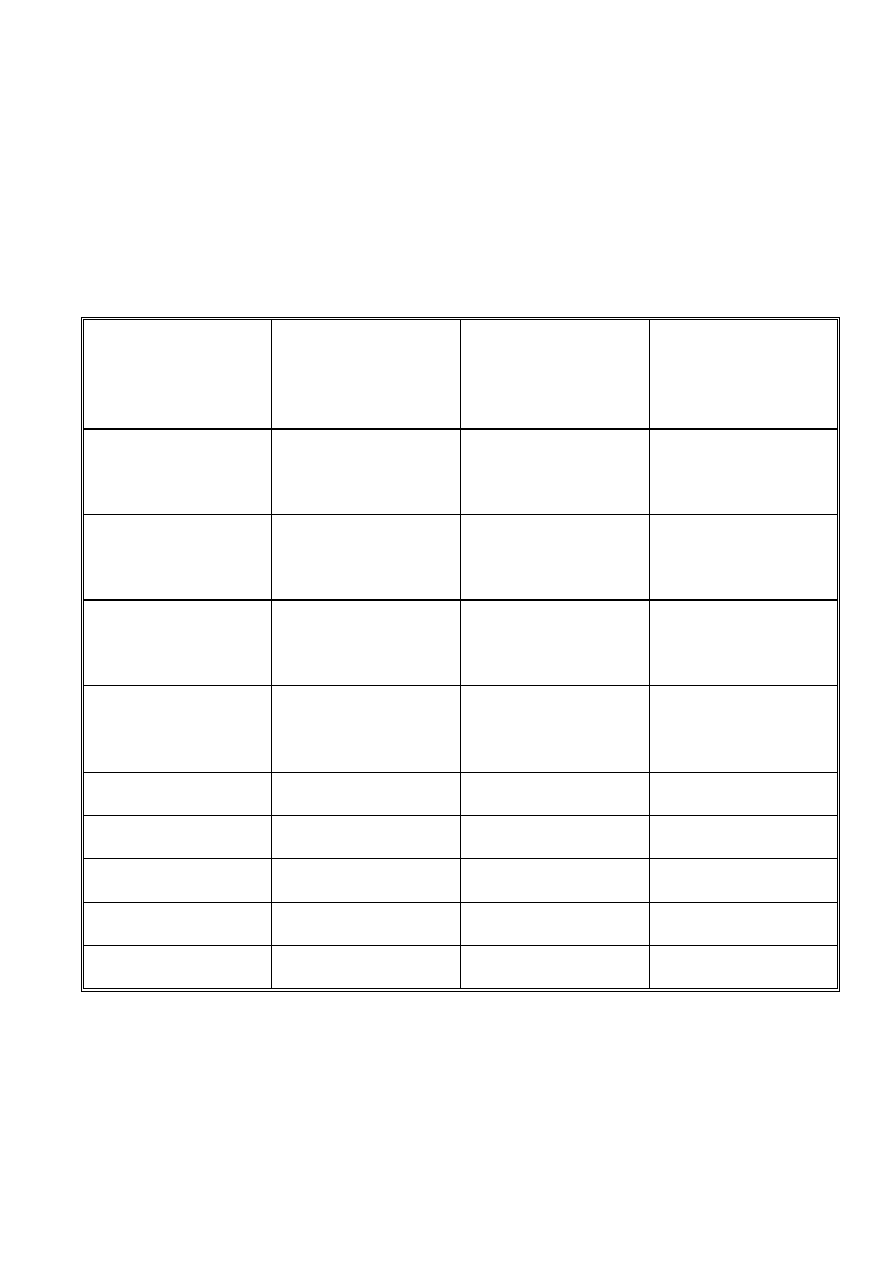
Napędy elektryczne i konkurencja
Napęd/
właściwości użyt-
kowe
Elektryczny
Pneumatyczny
Hydrauliczny
Rodzaj ruchu: obrót
liniowy
+++
+
, przekładnie
+
+++
+
+++
Gęstość mocy
[kW/kg]
0.1-0.2
do 2
2 – 10
20 - 50
Prędkość
[m/s]
0.5-1
do 10
1 – 2
do 15
0.1
Dokładność
liniowa [
m]
100
do 5
200 – 500
do 20
20
do 2
Koszt [100%]
100
30 – 80
200 - 300
Sprawność [%]
40 – 80
10 – 20
10 - 20
Ekologia/ hałas
+++/++
++/
+
-
/+++
Łatwość zabudowy
++
++
-
Miniaturyzacja [g]
0.1 – 10
5 – 30
100 - 500
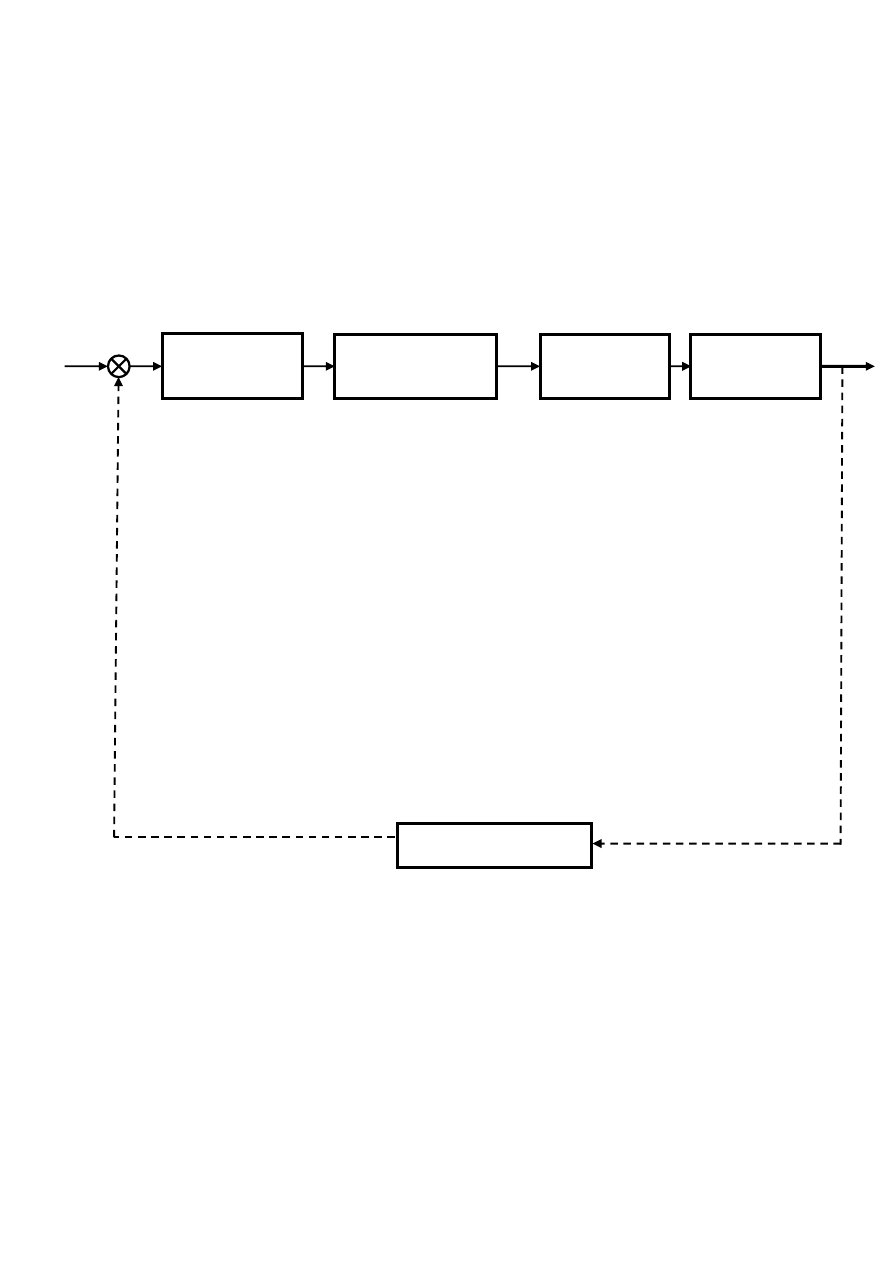
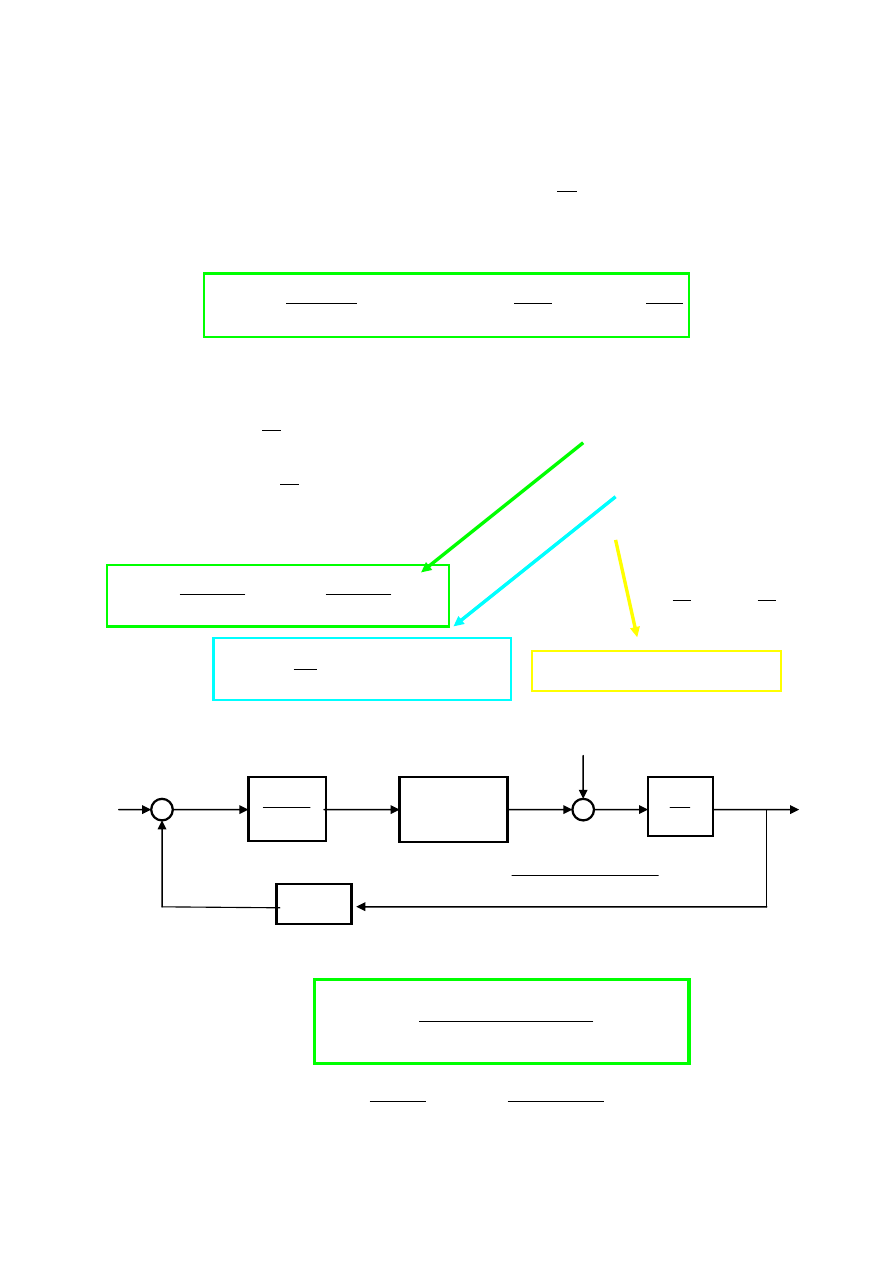
Struktura ogólna napędu elektrycznego
Układ regulacji
1. przekaźniki,
blokady
2. regulatory
prędkości i po-
łożenia
3. sterowniki po-
lem magne-
tycznym
Układ sterowania
el. wykonawczy
1. Zasilanie sieciowe
przełączalne
2. Sterowane zasila-
cze pr. =, falowni-
ki, softstart
3. Falowniki stero-
wane, komut. elek-
troniczne
Typ maszyny
elektrycznej
1. Silniki prądu
zmie
nnego
i
sta
łego
,
2. Silniki prądu
zmie
nnego
i
sta
łego krokowe
3. Silniki bez-
szczotkowe,
kompakt.
Wielkość wyj-
ściowa
1. prędkość
2. prędkość i/
lub położenie
3. położenie i
moment
Układ pomiarowy
1. Przekaźniki
2. Prądnice tachometryczne,
resolwery, przetworniki im-
pulsowe
3. resolwery, przetworniki
impulsowe, pomiar momen-
tu tensometr.
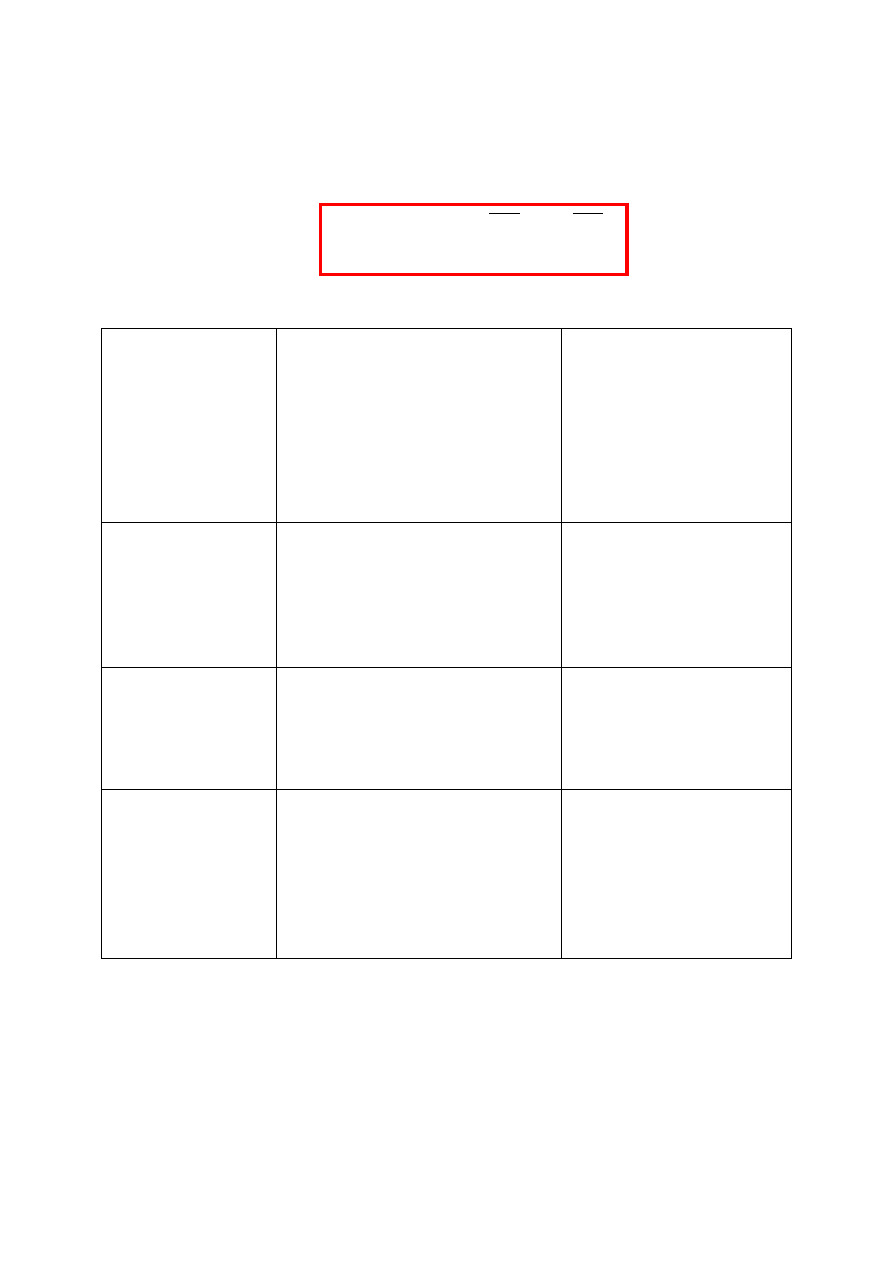
Silniki elektryczne – charakterystyka ogólna
Zasada działania
r
s
c
em
M
Silniki prądu sta-
łego
Zalety
mała masa
duży moment mechaniczny
wysoka sprawność
łatwa regulacja
wysokie obroty
Wady
zasilane przez pro-
stownik
koszt
konserwacja
hałas
praca dorywcza
Silniki prądu
zmiennego
zasilanie z sieci
bardzo trwałe
ciche
bezobsługowe
tanie
mały moment rozru-
chowy
trudna regulacja obro-
tów
ciężar
ograniczone obroty
Silniki krokowe
bezpośrednia kontrola
ciche
trwałe
zasilanie
mały moment mech.
duża masa
koszt
niska sprawność
Silniki bezszczot-
kowe
bardzo duży moment
mała masa
bardzo dobra regulacja
ciche
bezobsługowe
trwałe
wysokie obroty
drogie
zasilanie
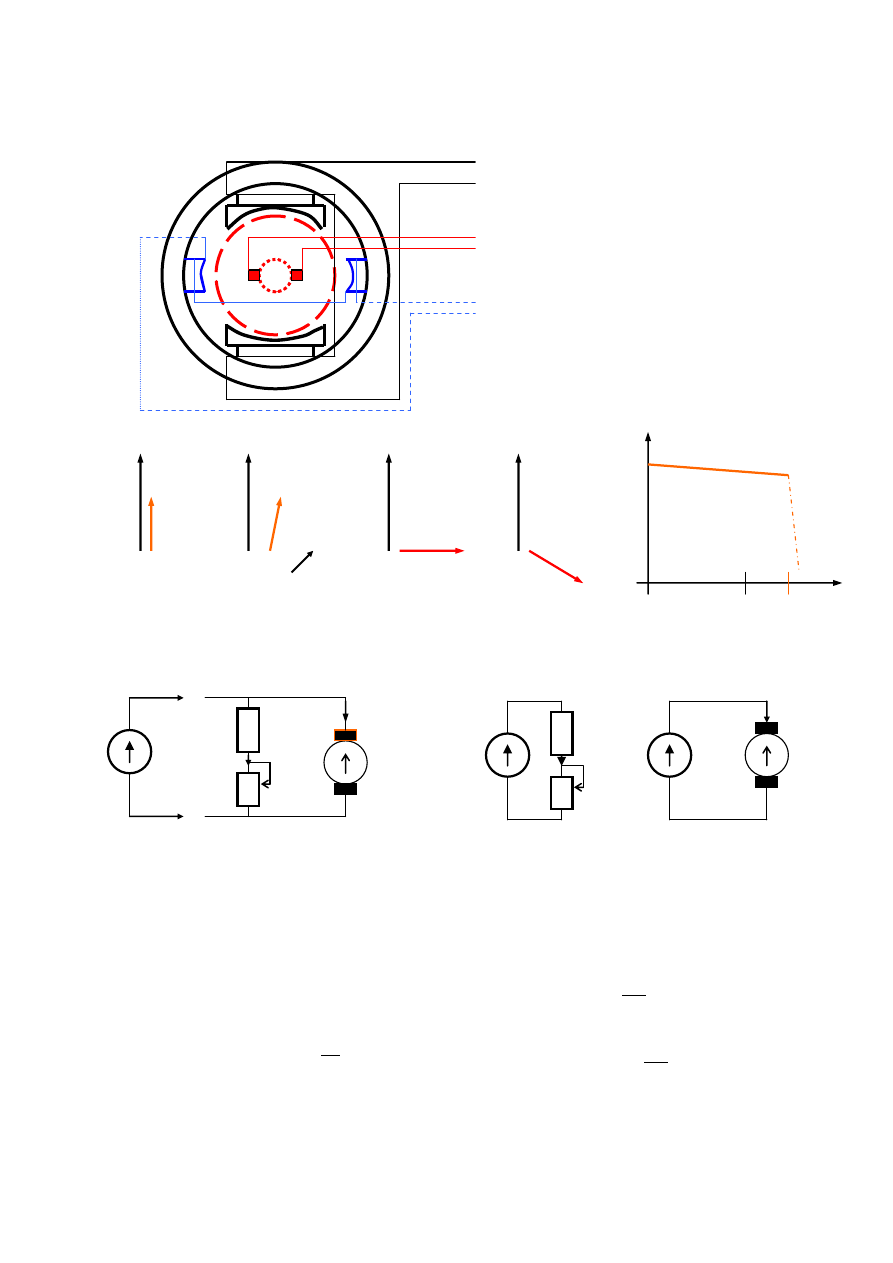
Silniki elektryczne prądu stałego
Silnik bocznikowy
Silnik obcowzbudny
Równania silnika
Wzbudzenie
Równania twornika
2
1
1
lub
.
)
(
E
E
U
I
dt
d
L
I
R
R
E
t
wzb
wzb
wzb
d
wzb
t
wzb
t
wzb
em
obc
em
wzb
t
t
t
t
t
I
c
c
M
dt
d
J
M
M
c
I
dt
d
L
I
R
U
3
3
2
'
s
w
w
Dużo zwojów cienkiego drutu
s
=z
s
I
s
I
s
płynie zawsze, I
s
powinno być małe
Mało zwojów grubego drutu
t
= z
t
I
t
I
t
wzrasta tylko przy obciążeniu, R
t
0
Strumień wytwarzany do korekcji pola tylko w
dużych silnikach
s
t
M
em
=0
s
t
M
em
s
t
M
em
=max
s
Silnik się zatrzymu-
je
t
n
M
em
0
M
nom
M
max
R
wzb
I
t
L
wzb
R
t
, L
t
I
wzb
SEM
R
d
wzb
t
R
wzb
I
t
E
1
L
wzb
E
2
R
t
, L
t
I
wzb
SEM
R
d
wzb
t
E
1
.
.
tan
1
const
const
R
R
E
I
ustalony
S
wzb
d
wzb
wzb
obc
wzb
t
obc
wzb
t
M
c
c
R
M
c
U
1
0
2
3
2
2
'
'
Silnik obcowzbudny
obc
wzb
wzb
wzb
t
obc
wzb
M
E
c
c
R
M
c
E
2
1
1
0
2
3
2
2
1
Silnik bocznikowy
d
wzb
wzb
R
R
E
c
1
2
1
1
0
2
1
3
2
1
1
)
(
)
(
E
M
E
c
c
R
R
R
cM
cE
R
R
E
obc
d
wzb
t
obc
d
wzb
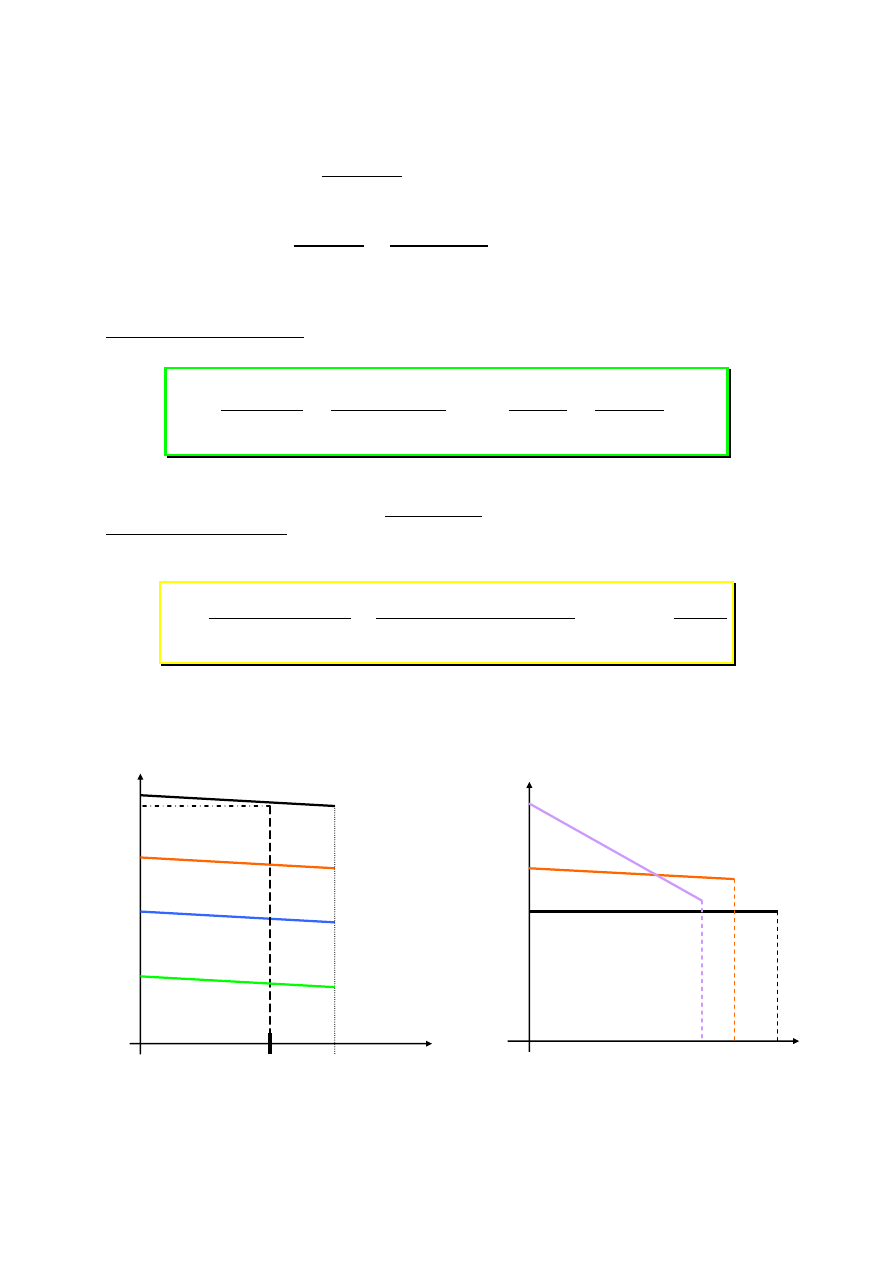
Regulacja prędkości obrotowej w silniku obcowzbudnym
Regulacja nap
ięciem zasilania
Regulacja strumieniem
n
n
wzbudzenia
U
1
R
d1
U
2
R
dn
U
3
R
d min
U
4
<
U
3
<
U
2
< U
1
0
M
obc
0
M
max1
M
maxn
M
max
Podstawowe parametry elektryczne silników prądu stałego
U
n
– napięcie nominalne [V]
I
n
– prąd nominalny [A] (przy nominalnym, długotrwałym obciążeniu
mech.)
I
max
– prąd maksymalny [A] (przy krótkotrwałym np. 0,5 s obciąże-
niu mech.)
M
n
– moment nominalny [Nm] (przy nominalnym, długotrwałym
obciążeniu mech.)
M
max
– moment maksymalny [Nm] (przy krótkotrwałym np. 0,5 s
obciążeniu mech.)
Stała napięciowa [V/s
-1
]- określa przyrost obrotów twornika przy
zmianie napięcia zasilania twornika (w stanie ustalonym przy
zadanym strumieniu wzbudzenia)
wzb
t
t
t
t
t
c
I
dt
d
L
I
R
U
2
0
0
t
t
I
I
dt
d
wzb
n
t
c
U
t
n
U
c
Stała momentowa [Nm/A]- określa przyrost prądu twornika silnika
przy zmianie momentu obciążenia mechanicznego (w stanie
ustalonym przy zadanym strumieniu wzbudzenia)
t
wzb
em
I
c
M
3
const
wzb
t
em
m
I
M
c
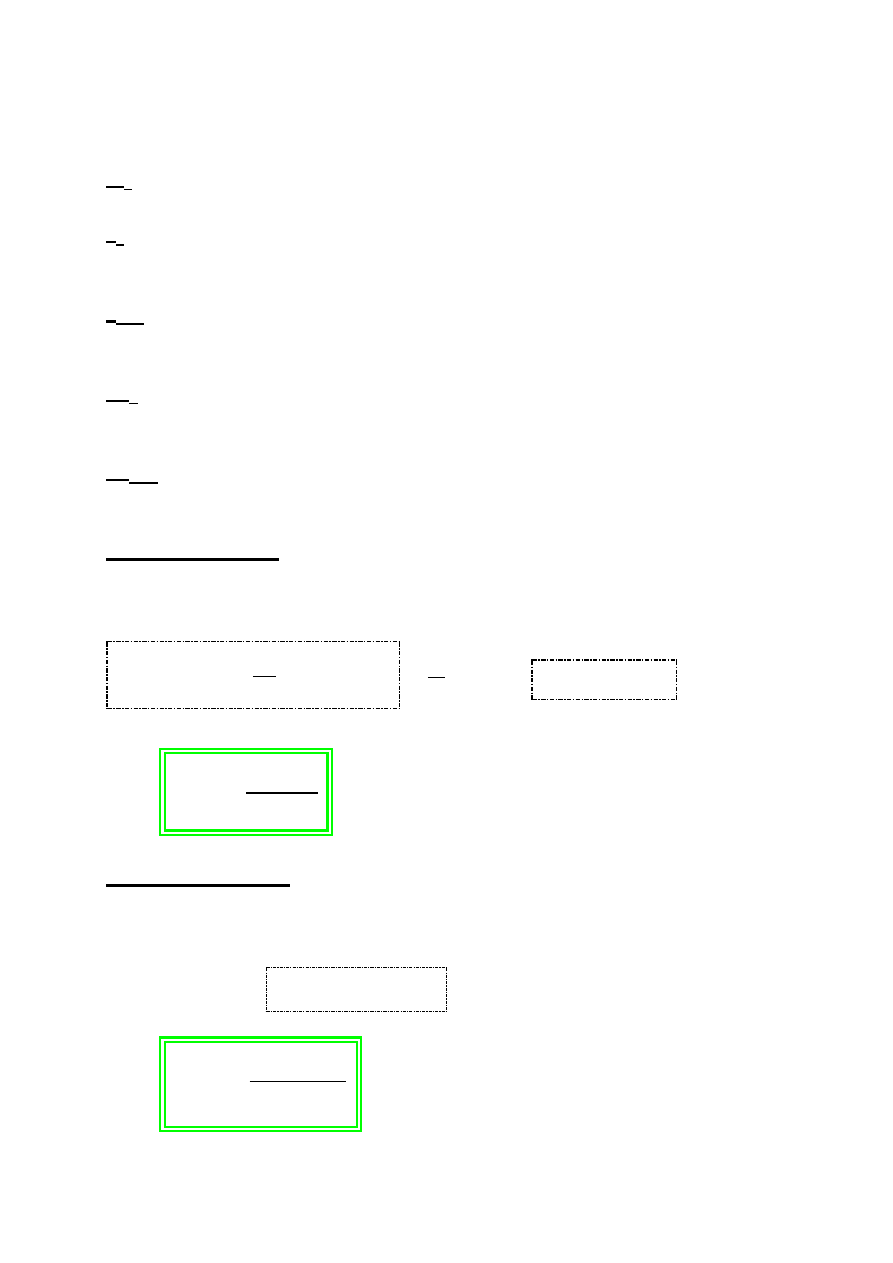
Rozruch silników prądu stałego
0
)
50
10
(
,
d
n
t
t
roz
t
R
gdy
I
R
U
I
N
rozr
I
I
3
2
1
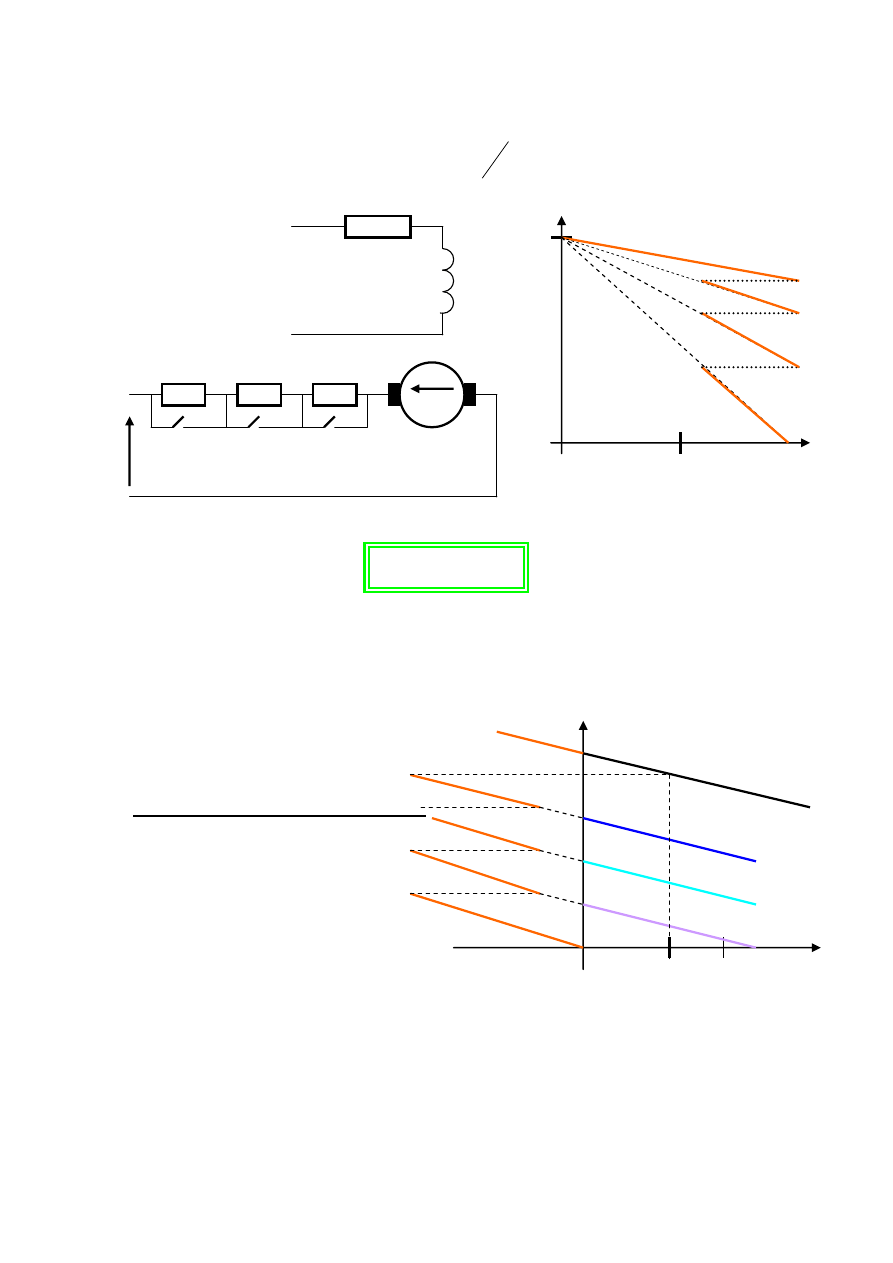
Hamowanie silnika prądu stałego
1. Praca generatorowa przy
zmniejszaniu napięcia zasilania
R
wzb
, L
wzb
wzb
R
1
R
2
R
3
R
t
, L
t
E
U
t
Q
1
Q
2
Q
3
N
M
o
M
c I
t
R
1
+R
2
+R
3
R
1
+R
2
R
1
R
d
=0
M<0
M
obc
M
N
M
I
t
<0
I
t
>0
U
N
U
1
< U
N
U
2
< U
1
U
3
< U
2
Zmniejszanie napięcia zapewnia
ograniczenie prądu twornika i nie-
wielkie straty,
mały moment hamujący przy n
0
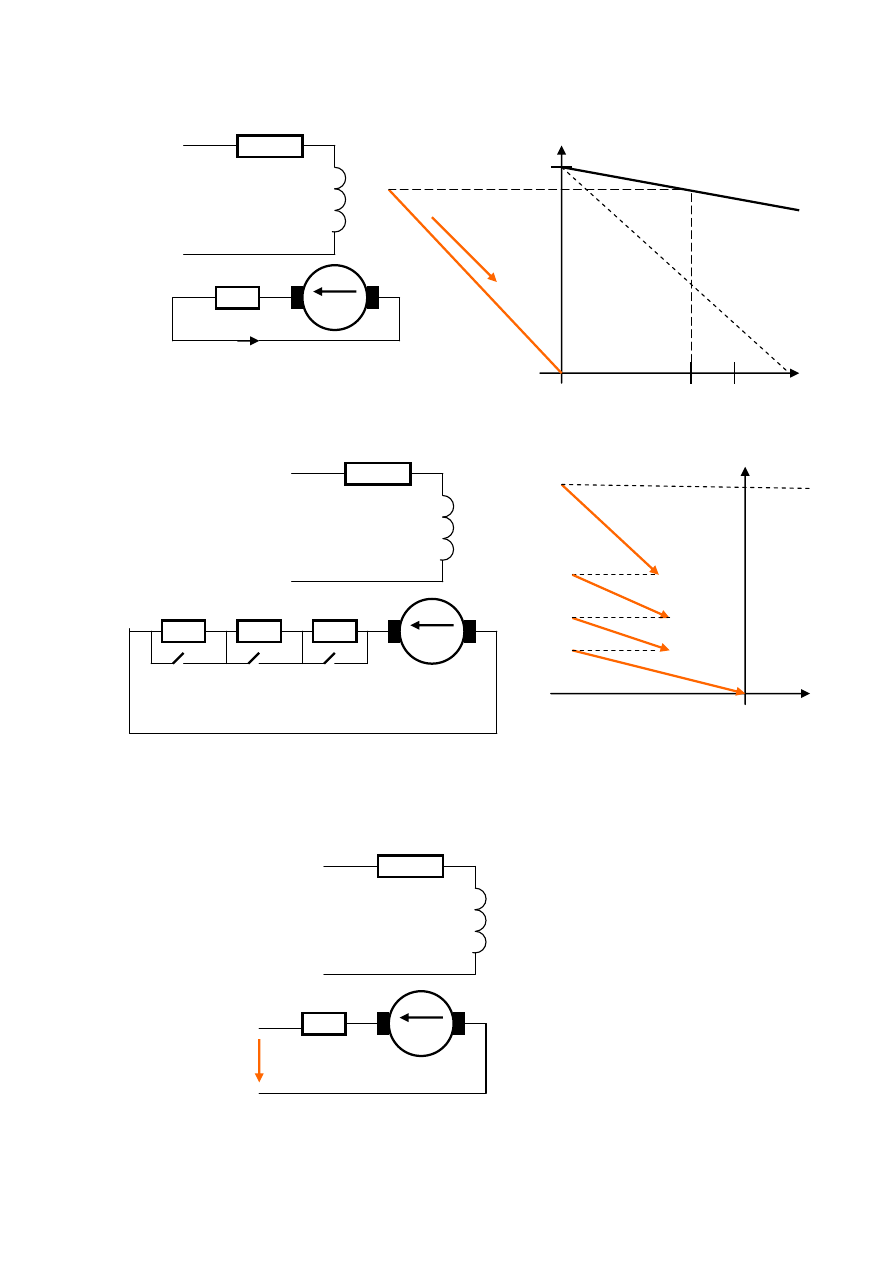
2. Hamowanie dynamiczne
2’. Z zastosowaniem oporników rozruchowych
3. Hamowanie przeciw-
włączeniowe
R
wzb
, L
wzb
wzb
M
o
M
N
R
h
=0
R
t
, L
t
R
h
I
t
E
Niski moment hamujący dla n
0
R
h
>>0
R
wzb
, L
wzb
wzb
R
1
R
2
R
3
R
t
, L
t
E
Q
1
Q
2
Q
3
I
t
< 0
.
R
1
+R
2
+R
3
R
1
+R
2
R
1
R
d
=0
R
wzb
, L
wzb
wzb
E
U
t
R
h
Energia rozpraszana w R
h
,
Duże straty,
R
h
10 =- 20 R
t
Właściwości dynamiczne silników prądu stałego
Obwód wzbudzenia
:
)
(
)
(
)
(
)
(
)
(
)
(
s
I
sL
s
I
R
s
U
t
I
dt
d
L
t
I
R
t
U
wzb
wzb
wzb
wzb
wzb
wzb
wzb
wzb
wzb
wzb
wzb
wzb
wzb
wzb
wzb
wzb
wzb
wzb
wzb
R
L
T
R
k
s
U
sT
k
s
I
,
1
),
(
1
)
(
Obwód twornika
(przy założeniu że
wzb
=cons.)
)
(
)
(
)
(
)
(
'
)
(
)
(
)
(
)
(
)
(
)
(
)
(
)
(
)
(
)
(
)
(
)
(
)
(
)
(
)
(
3
3
3
2
2
s
I
c
s
M
t
I
c
t
c
t
M
s
sJ
s
M
s
M
t
dt
d
J
t
M
t
M
s
c
s
I
sL
s
I
R
s
U
t
c
t
I
dt
d
L
t
I
R
t
U
t
wzb
em
t
wzb
t
wzb
em
obc
em
obc
em
wzb
t
t
t
t
t
wzb
t
t
t
t
t
)
(
)
(
1
)
(
2
s
sL
R
c
s
U
sL
R
t
I
t
t
wzb
t
t
t
t
t
t
t
t
t
R
L
T
R
k
,
1
))
(
)
(
(
1
)
(
s
M
s
M
sJ
s
obc
em
)
(
)
(
3
s
I
c
s
M
t
wzb
em
Schemat blokowy silnika obcowzbudnego lub z magnesami trwałymi
G
U
(s)
),
(
1
)
(
2
s
U
T
T
s
sT
k
s
t
t
m
m
U
wzb
t
m
wzb
U
c
c
k
J
T
c
k
2
3
2
2
,
1
t
t
sT
k
1
wzb
c
3
sJ
1
wzb
c
2
-
M
obc
U
t
I
t
M
em
+
+
-
SEM
)
(
)
1
(
)
(
2
3
2
3
s
U
c
c
sT
sJ
c
k
s
t
wzb
t
wzb
t
G
M
(s)
),
(
1
)
(
2
s
M
T
T
s
sT
k
s
obc
t
m
m
M
wzb
M
c
c
k
2
3
2
1
t
t
wzb
t
t
t
m
t
m
m
R
L
L
c
c
JR
T
T
T
T
T
a
b
s
4
4
0
4
,
2
2
3
2
2
2
,
1
G
IU
(s)
),
(
1
)
(
2
s
U
T
T
s
sT
sk
s
I
t
t
m
m
U
I
t
wzb
U
I
c
c
J
k
2
3
2
G
IM
(s)
),
(
1
)
(
2
s
M
T
T
s
sT
k
s
I
obc
t
m
m
M
I
t
t
wzb
M
I
k
c
k
3
1
U
t
t
M
obc
t
I
t
I
t
I
t
t
t
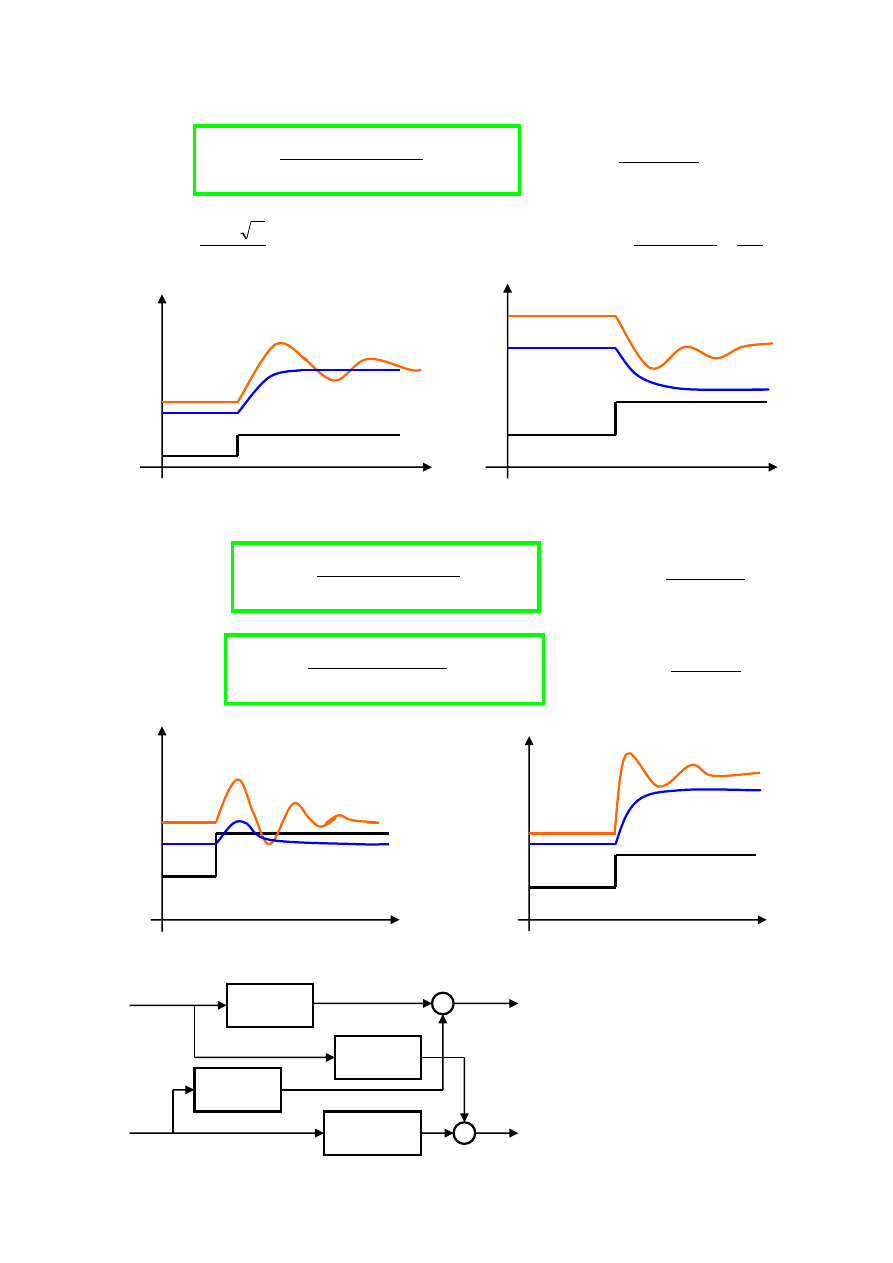
T
m
>4T
t
,
T
m
<4T
t
T
m
>4T
t
,
T
m
<4T
t
G
U
(s)
G
IU
(s)
G
M
(s)
G
IM
(s)
U
t
M
obc
I
t
Uproszczony
schemat blokowy
maszyny prądu
stałego
Poprawa właściwości dynamicznych silników pr. stałego
Zmniejszenie wartości stałych czasowych:
T
wzb
:
wzb
wzb
wzb
R
L
T
duża liczba zwojów cienkiego drutu, dla zmniejszenia
strat i poprawy sprawności,
zastąpienie przez stałe magnesy T
wzb
= 0,
typowe wartości T
wzb
100
– 300 ms (!)
T
t
:
t
t
t
R
L
T
mała liczba zwojów, duże prądy chwilowe, uzwojenia
bez obwodu magnetycznego,
typowe wartości T
t
3
– 15 ms
T
m
:
wzb
t
m
c
c
JR
T
2
3
2
mała bezwładność J
, silne pole magnetyczne
wzb
, uzwo-
jenia o małej liczbie zwoi grubego drutu R
t
,
typowe wartości T
m
20
– 300 ms
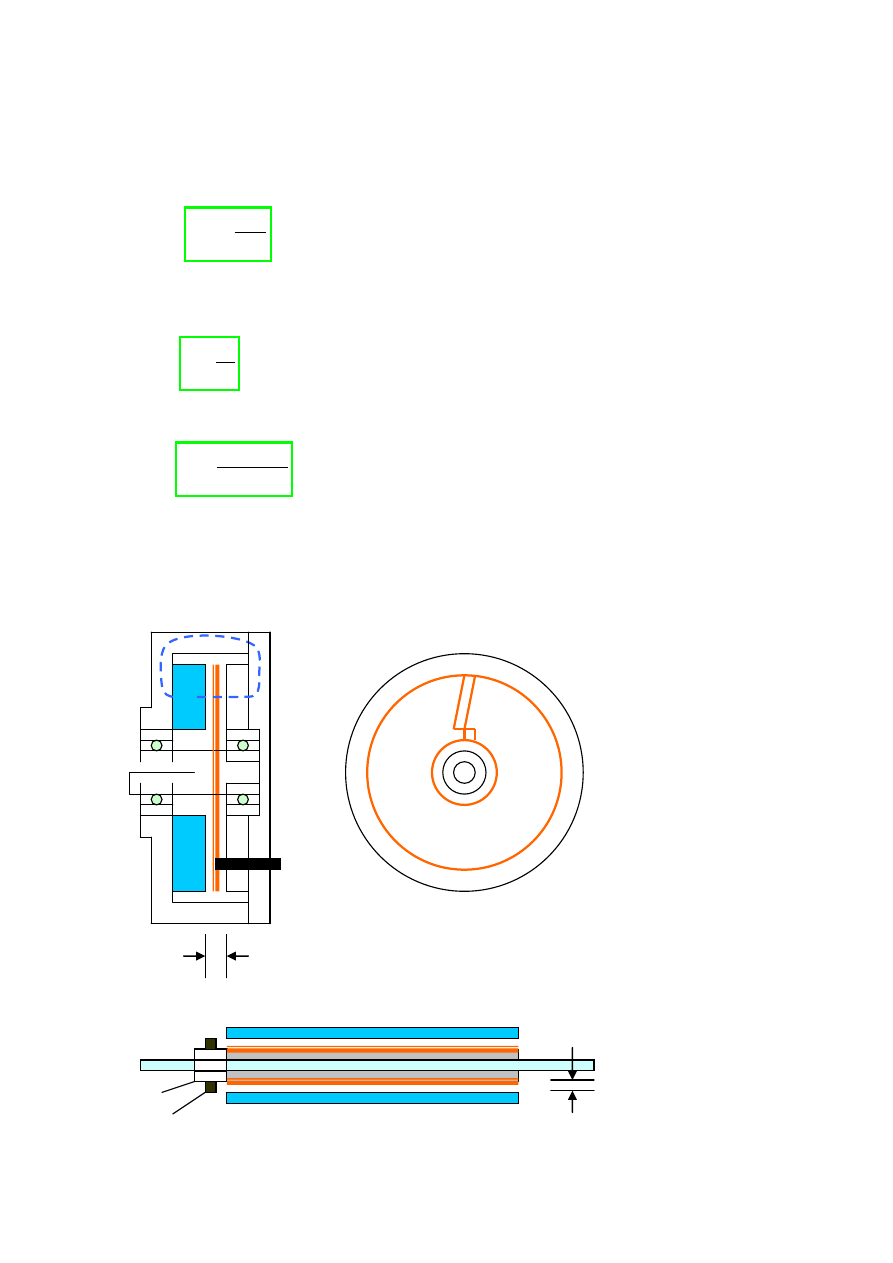
Silniki tarczowe
Silniki wysoko-
obrotowe o wąskim wale, n
10 000
– 20 000 obr/min
-1
N S
N S
1.5
– 2 mm
Wirnik w formie płaskiej, lekkiej tarczy –
duży moment, mała bezwładność,
Zalety: małe J, b.
mała L
w
,
Wady: duże straty
strumienia,
mniejsza
sprawność,
N
S
N
S
Komutator
Szczotki
Magnesy trwałe
Uzwojenia naklejo-
ne na wirniku,
1,5
– 2 mm
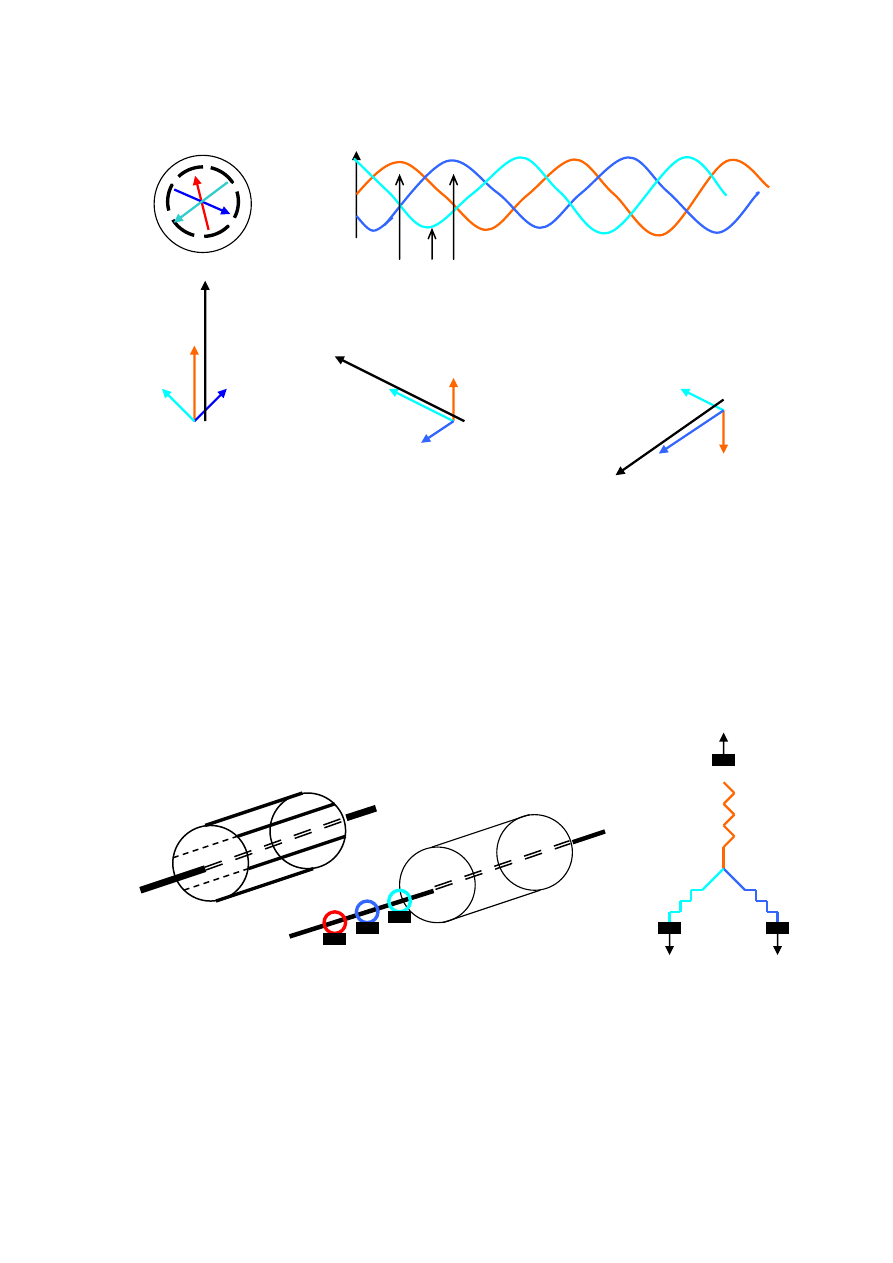
Silniki prądu zmiennego – asynchroniczne (indukcyjne)
Konstrukcja stojana zawiera po p
– par nabiegunników dla każdej z 3 faz:
p=1
– 1 obrót pola na 1 okres zmienności: n
s
= 3000 obr/min
-1
, n
n
= 2850 obr/min
-1
p=2
– 1/2 obrotu pola na 1 okres zmienności: n
s
= 1500 obr/min
-1
, n
n
= 1420 obr/min
-1
p=3
– 1/3 obrotu pola na 1 okres zmienności: n
s
= 1000 obr/min
-1
, n
n
= 950 obr/min
-1
p=4
– 1/4 obrotu pola na 1 okres zmienności: n
s
= 750 obr/min
-1
, n
n
= 720 obr/min
-1
p=6
– 1/6 obrotu pola na 1 okres zmienności: n
s
= 500 obr/min
-1
, n
n
= 485 obr/min
-1
p=8
– 1/8 obrotu pola na 1 okres zmienności: n
s
= 375 obr/min
-1
, n
n
= 365 obr/min
-1
Konstrukcja wirnika
t
I II III
R
S
T
I.
w
R
II.
w
R
T
S
T
III.
T
S
w
R
S
Klatkowy
Pierścieniowy
Uzwojenia faz wirnika
pręty aluminiowe lub
miedziane, jedna czasem
dwie klatki
Wyszukiwarka
Podobne podstrony:
Zagad NE09, Politechnika Wrocławska, PWR - W10- Automatyka i Robotyka, Sem3, Elektro, Podstawy elekt
pytania napędy elektryczne ciąg 1 OgarnijTemat com
Napędy elektryczne
01 wstepny elektrycznyid 3080 Nieznany
62 MT 01 Fale elektromagnetyczne
sc5 druk, Politechnika Wrocławska, PWR - W10- Automatyka i Robotyka, Sem3, Elektro, Podstawy elektro
SC3, Politechnika Wrocławska, PWR - W10- Automatyka i Robotyka, Sem3, Elektro, Podstawy elektrotechn
MASZYNY, MECHATRONIKA, IV Semestr, Maszyny i Napędy Elektryczne
Sprawko napedy elektryczne gr 3 7 zespol 1(1)
pytania napędy elektryczne ciąg 1
18P, Politechnika Lubelska, Studia, Studia, sem VI, semestr 6, napędy elektryczne
sprawko jakies, Studia, Napędy elektryczne, od marcina, ne, 1Napędy elektryczne, Napędy elektryczne,
Zadanie 1 warianty, AiR WIP, V semestr, NEMAR Napędy elektryczne maszyn i robotów
pytania napędy elektryczne ciąg 1
Napędy elektryczne notatki
Eegzamin zagadnienia cz1, Politechnika Wrocławska, PWR - W10- Automatyka i Robotyka, Sem3, Elektro,
więcej podobnych podstron