Ćwiczenie 4: Energia sprężysta i hipotezy wytężeniowe,
wersja dla studentów
(opracowali: Z. Waszczyszyn i M. Kłos)
Wzory dla energii sprężystej
Energia sprężysta U, złożona z energii odkształcenia objętościowego
V
U i postaciowego
f
U
)
V
(
)
V
(
f
V
f
V
,
dV
dV
U
U
U
(1)
gdzie energia właściwa wynosi:
,
2
1
6
E
E
6
2
1
2
y
x
2
z
y
x
V
z
(2a)
2
zx
2
yz
2
xy
x
z
z
y
y
x
2
z
2
y
2
x
f
3
E
3
1
.
4
3
1
3
E
2
zx
2
yz
2
xy
x
z
z
y
y
x
2
z
2
y
2
x
(2b)
Przykład 1
(Krzyś i Życzkowski) [5], str. 94
Jak zmienia się stosunek energii:
U
/
U
f
i
U
/
U
v
dla pręta pryzmatycznego rozciąganego siłą P
w zależności od wartości współczynnika Poissona .
Stan naprężenia jednoosiowego
A
/
P
x
generuje:
v
f
,
,
v
f
.
Energia sprężysta pręta ze względu na stan naprężenia jednorodnego:
V
E
2
V
V
dV
dV
U
U
U
2
)
v
(
v
f
v
)
v
(
f
v
f
,
a więc stąd wynika:
V
V
U
v
f
.
Stosunek energii:
,
1
3
2
E
2
E
3
1
U
U
C
f
f
f
.
2
1
3
1
E
2
E
6
2
1
C
v
v
(3)
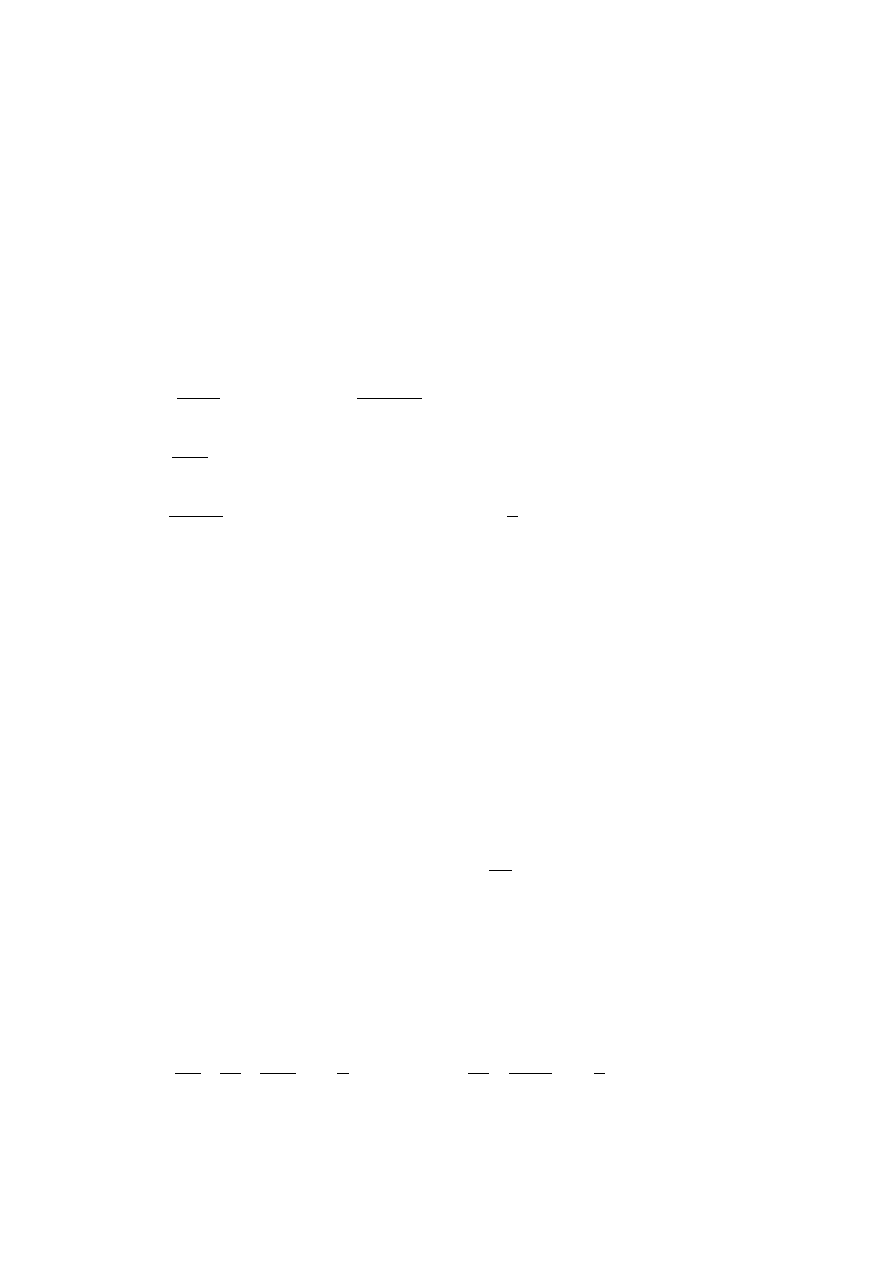
Na rys.1 podano zależności
f
C
i
v
C
0 0 . 5
1 . 0
C
f
C
f
C
C
2
3
1
3
Rys.1. Współczynniki
f
C i
v
C jako funkcje współczynnika Poissona
dla pręta swobodnie rozciąganego.
Widać, że dla
5
.
0
będzie
0
C
v
, gdyż materiał jest nieściśliwy i w pręcie pojawi się tylko
energia odkształcenia postaciowego.
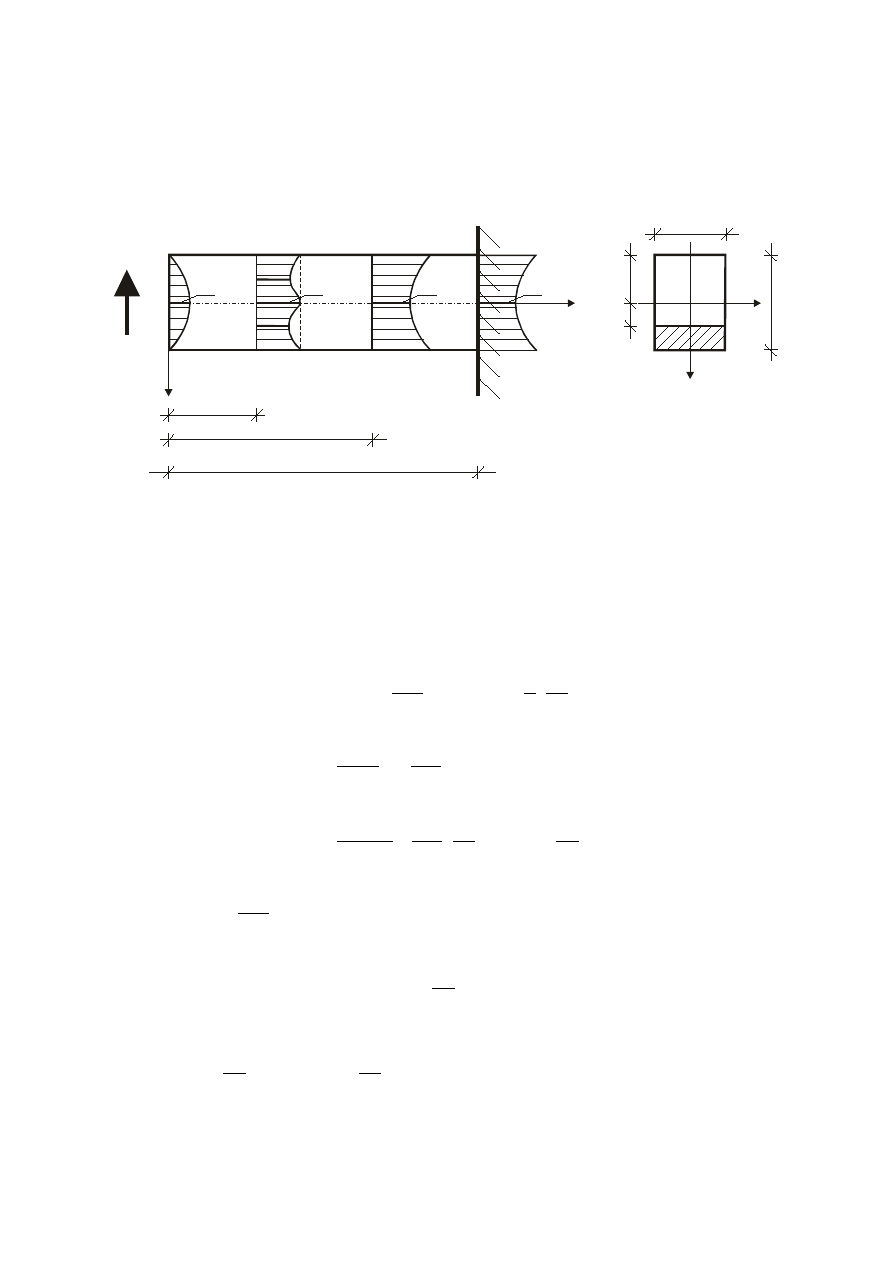
Przykład 2 (Krzyś i Życzkowski [5], str. 96
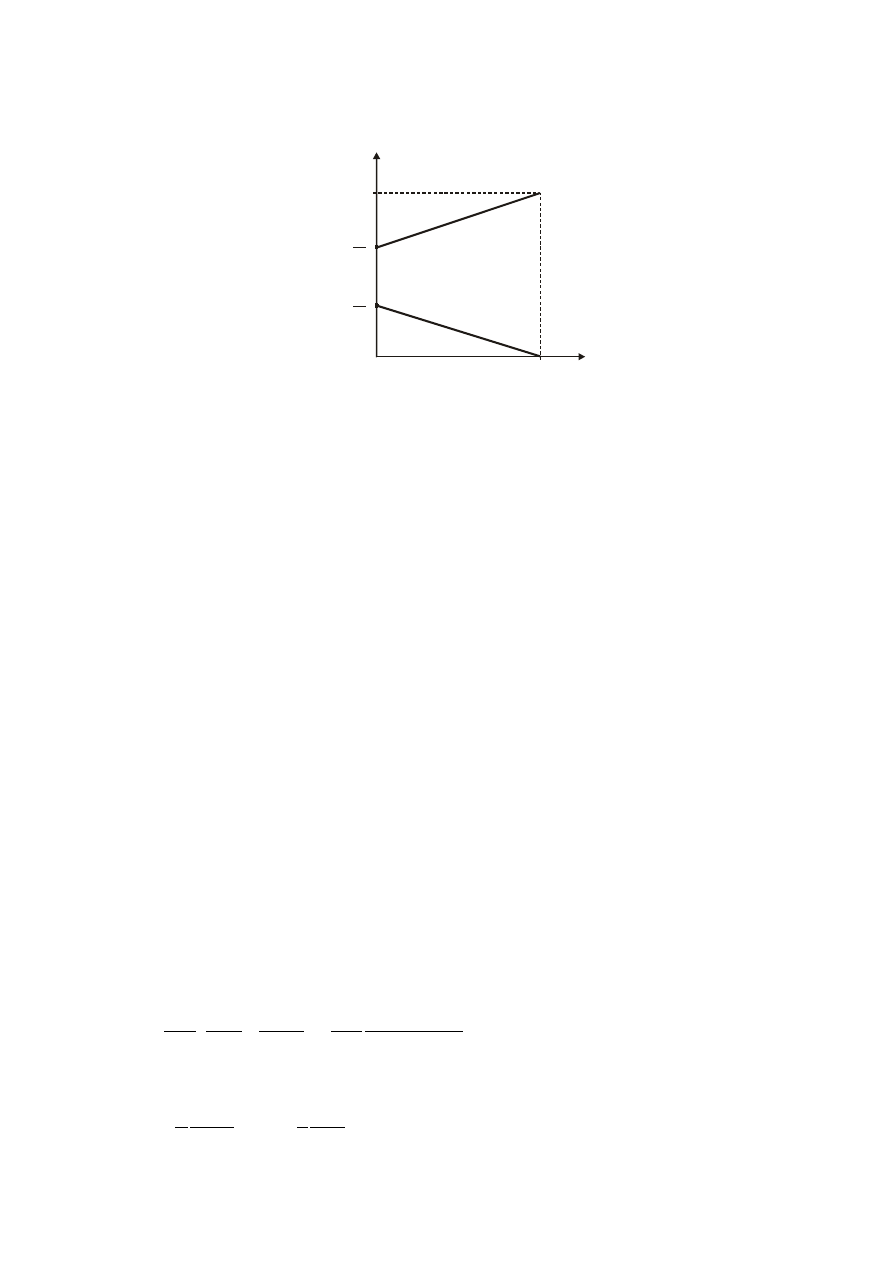
Pręt pryzmatyczny ściskany siłą P umieszczony w dopasowanej tuleji, idealnie gładkiej (nie
występują siły tarcia między prętami i tuleją). Zbadać jak się zmieniają współczynniki
f
C
oraz
v
C
.
W pręcie występuje jednoosiowy stan odkształcenia
0
,
0
,
0
zx
yz
xy
z
y
x
,
(4)
oraz przestrzenny stan naprężeń, rys.2a
z
y
x
,
y
,
(5)
a, więc:
z
y
(6)
Zamiast prowadzić obliczenia w naprężeniach możemy obliczenia wykonać znacznie prościej
korzystając ze wzorów (2) wyrażonych przez odkształcenia:
v
f
,
2
1
1
1
2
E
2
1
1
1
2
6
E
2
x
2
x
(7)
stąd wynikają współczynniki:
.
1
1
3
1
C
,
1
2
1
3
2
C
v
f
(8)
Na rys. 2b pokazano zależności
f
C
oraz
v
C
. W przeciwieństwie do pręta swobodnego, pręt
skrępowany tuleją dla
5
.
0
ma C
v
= 1.0 , gdyż nie może się odkształcić czysto postaciowo i
zachowuje się jak idealnie sztywny.
x
x
x
x
x
y
y
Rys. 2a
0 0 . 5
1 . 0
0 . 6 6 7
0 . 3 3 3
C
f
C
f
C
C
Rys. 2b
Rys.2:a) ściskanie pręta w dopasowanej tuleji, b) współczynniki
f
C
oraz
v
C
.
Przykład 3 (Krzyś i Życzkowski [ ], s. 99)
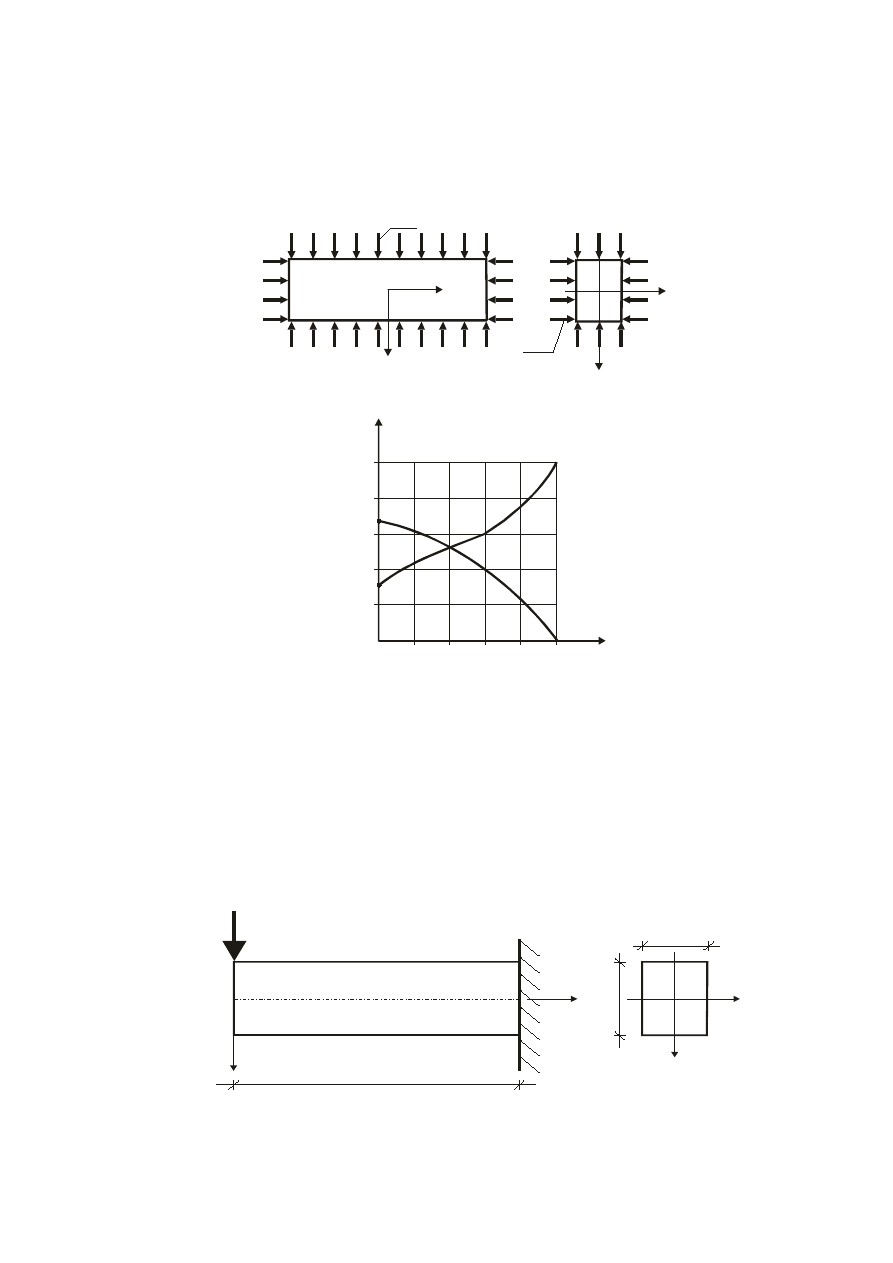
Obliczyć wartość energii odkształcenia postaciowego i objętościowego dla podanej belki,
przyjmując wzory z wytrzymałości materiałów i niżej podane dane.
b = 1 cm, h = 2 cm, l = 20 cm, P = 10KN, E = 210 GPa, = 0.3 .
x
b
y
z
h
P
l
y
Rys. 3
Wzory z wytrzymałości materiałów
x
,
xy
.
Z wzorów (2) na energię właściwą
2
6
2
1
x
v
E
,
2
2
3
3
1
xy
x
f
E
(9)
Podstawiamy (9) do wzoru (2):
3
l
I
P
E
6
2
1
dx
dy
y
x
b
I
P
E
6
2
1
dx
dy
dz
y
x
I
P
E
6
2
1
dz
y
x
dy
dx
I
P
E
6
2
1
dV
y
x
I
P
E
6
2
1
U
3
z
2
2
/
h
2
/
h
2
l
0
2
2
z
2
2
/
b
2
/
b
2
/
h
2
/
h
2
l
0
2
2
z
2
2
/
b
2
/
b
2
2
2
/
h
2
/
h
l
0
2
z
2
)
v
(
2
2
2
z
2
v
(10)
3
3
2
2
1
3
2
bh
l
P
E
U
v
kNm
833
.
0
l
h
10
9
1
bh
l
P
E
1
3
4
dV
y
4
h
4
3
dV
y
x
I
P
E
3
1
U
2
3
3
2
)
V
(
2
2
2
)
V
(
2
2
2
z
2
f
Całkowita energia i współczynniki
V
C i
f
C
U = 0.960 kNm ,
C
V
= 0.132, C
f
= 0.868 .
Wzory dla hipotez wytężeniowych
1). Hipotezy naprężeniowe:
G: Galileusza
r
1
k
,
(11)
TG: Tresci - Guesta
r
3
1
k
.
(12
2). Hipotezy odkształceniowe:
SV: Saint–Venanta
r
3
2
1
k
.
(13)
3). Hipotezy energetyczne
HMH: Hubera - Misesa – Hencky`ego
2
zx
2
yz
2
xy
x
z
z
y
y
x
2
z
2
y
2
x
1
3
3
2
2
1
2
3
2
2
2
1
2
0
3
(14)
B: Burzyńskiego
2
HMH
2
z
y
x
2
z
y
x
0
4
1
1
2
1
(15)
Przykład 4
(Krzyś i Życzkowski [5], str. 123)
Stan naprężenia w punkcie jest określony następującymi danymi:
a)
3
.
0
,
0
,
MPa
10
yz
zx
xy
z
y
x
b)
3
.
0
,
0
,
MPa
10
yz
zx
xy
z
y
x
Przypadek a)
Dla hipotezy HMH możemy od razu obliczyć
HMH
Dla pozostałych hipotez najpierw liczymy naprężenia główne
MPa
1
.
4
,
MPa
10
,
MPa
1
.
24
3
2
1
Dalej liczymy:
G
TG
SV
HMH
Dla hipotezy Burzyńskiego przyjmujemy:
1
(stal):
MPa
5
.
24
HMH
B
6
.
3
(żeliwo):
B
Przypadek b)
MPa
1
.
24
,
MPa
10
,
MPa
1
.
4
3
1
2
Wyniki dla różnych hipotez
Wyniki dla a)

MPa
G
1
.
4
24.1 MPa
MPa
1
.
28
1
.
24
1
.
4
TG
28.1 MPa
MPa
3
.
14
1
.
24
10
3
.
0
1
.
4
SV
22.3 MPa
1
MPa
5
.
24
B
HMH
24.5 MPa
MPa
6
.
27
6
.
3
B
6.02 MPa
Przykład 5
(Krzyś i Życzkowski [5], str. 128
Dla przypadku czystego ścinania określonego jednym naprężeniem porównać naprężenia
zastępcze wynikające z hipotez.
Według hipotezy
max
:
2
0
Według hipotezy Hubera:
.
3
0
W porównaniu z hipotezą Hubera, która – jak wykazuje doświadczenie – najlepiej odpowiada
rzeczywistemu zachowaniu się materiałów elastoplastycznych, hipoteza
max
daje wynik o
6
.
15
3
3
2
% za wysoki (na korzyść pewności).
Przykład 6
(Krzyś i Życzkowski [5], str. 125
Dla stanu naprężenia o charakterystycznym stosunku
1
:
2
:
4
:
:
3
2
1
określić dopuszczalne
wartości naprężeń zastępczych za pomocą TG i HMH przyjmując:
a) stal o naprężeniach dopuszczalnych
,
3
.
0
,
MPa
0
.
120
k
k
c
r
b) żeliwo o naprężeniach dopuszczalnych
3
.
0
,
MPa
3
.
33
k
,
MPa
0
.
120
k
r
c
Według hipotezy TG (Coulomba – Guesta)
r
k
3
1
uwzględniając
,
4
1
1
3
otrzymujemy
3
2
1
zatem dla stali
,
MPa
160
1
,
MPa
80
2
,
MPa
40
3
dla żeliwa zaś
,
MPa
4
.
44
1
,
MPa
2
.
22
2
,
MPa
1
.
11
3
Według hipotezy HMH
r
k
1
3
3
2
2
1
2
3
2
2
2
1
,
uwzględniając
1
2
2
1
,
1
3
4
1
otrzymujemy:
r
2
1
2
1
2
1
2
1
2
1
2
1
k
4
1
8
1
2
1
16
1
4
1
,
1
2
3
czyli
,
51
.
1
1
r
k
,
76
.
0
2
r
k
,
38
.
0
3
r
k
a więc dla stali
MPa
2
.
181
1
,
,
MPa
6
.
90
2
,
MPa
3
.
45
3
dla żeliwa zaś
MPa
3
.
50
1
,
,
MPa
15
.
25
2
,
MPa
6
.
12
3
Przykład 7.
(wg Krzysia i Życzkowskiego [5], s. 130)
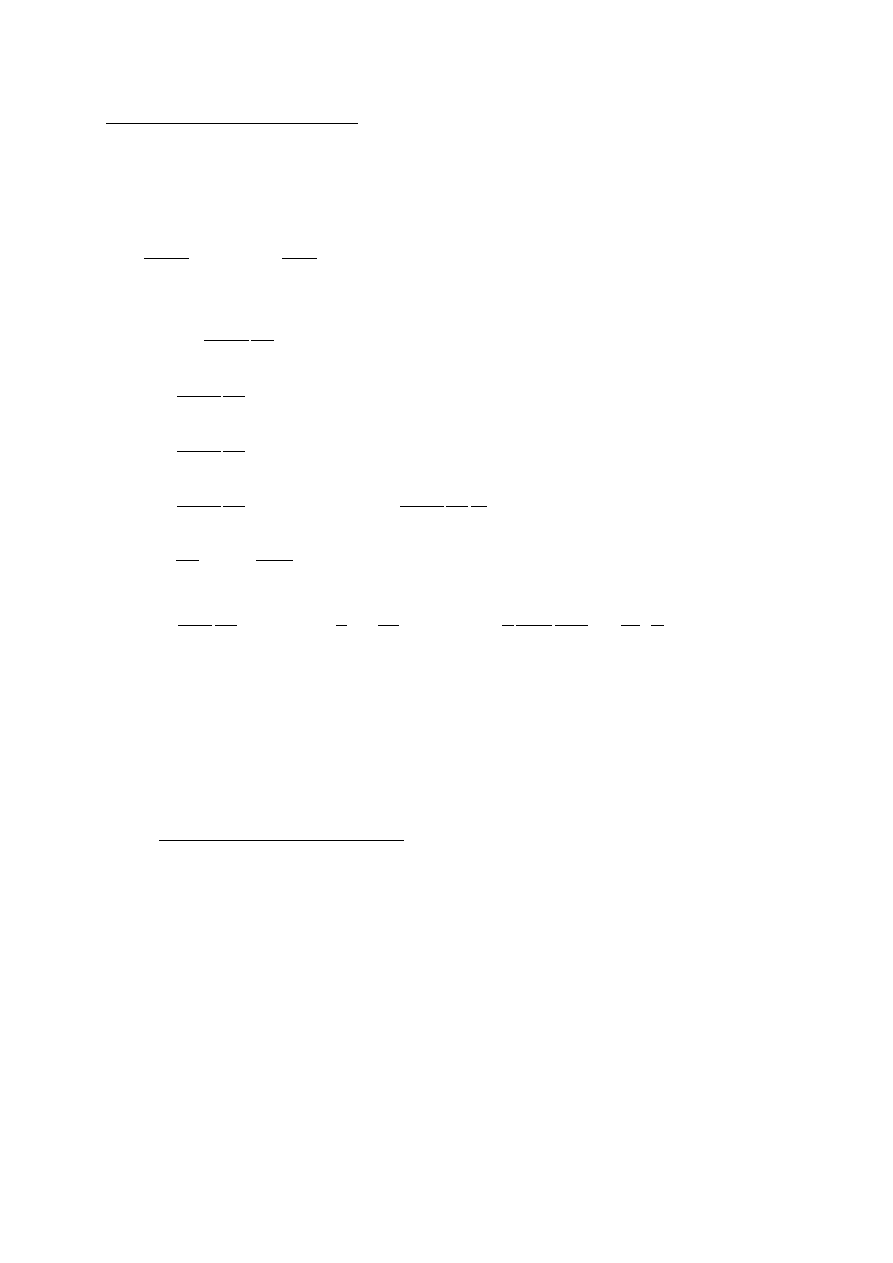
Dla belki wspornikowej o schemacie jak na rysunku wyznaczyć odległość x
, która rozróżnia
obszary dla których naprężenia zredukowane są maksymalnie na osi belki (y=0) lub we
włóknach skrajnych (y = h/2)
x
b
y
z
y
=
y
P
l
- y
d
y
d
y
0
0
0
1
y
2
y
y
3
3
0
0
0
g
0
d
y
=
1
y
=
2
0
g
0
0
0
g
0
0
x
*
x
* *
g
d
d
y
h
=
2
y
Rys. 4
L = 1.0 cm
E = 210 GPa
H = 20 cm
E = 2.10 - 10
3
MPa
B = 6 cm
- Pole sił wewnętrznych
P
x
Q
,
Px
x
M
- Charakterystyki przekroju
2
2
z
2
2
z
y
4
h
2
b
)
y
(
S
,
1
bh
I
,
bh
A
(16)
- Pola naprężeń
Fxy
2
xy
bh
P
12
y
I
)
x
(
M
3
z
x
(17)
2
2
2
2
3
z
z
xy
y
4
h
F
y
4
h
bh
P
6
b
I
)
y
(
QS
(18)
gdzie:
3
bh
P
6
F
a) Hipoteza HMH
2
2
2
2
2
2
2
2
0
y
4
h
3
y
x
4
F
3
(19)
Stąd równania
ścinanie
2
2
2
zginanie
2
2
2
0
y
4
h
3
y
x
4
F
(19.1)
Rozumowanie: Szukamy takiego
*
x , dla którego naprężenie zredukowane od zginania we włóknach
skrajnych jest równe naprężeniu zredukowanemu od ścinania dla osi obojętnej, a więc:
,
h
16
3
x
16
h
3
4
h
x
4
2
2
*
4
2
2
(20)
stąd
h
433
.
0
h
16
3
x
*
(21)
Wartość naprężenia maksymalnego naprężenia zredukowanego wynika z (2) lub (1):
A
P
6
.
2
bh
P
2
3
3
4
h
3
F
2
h
y
,
x
0
y
,
x
2
*
0
*
0
(22)
Obliczanie
*
*
x jest bardziej złożone, gdyż wymaga wyznaczenia położenia ekstremów
.
0
y
y
,
0
y
3
2
1
Równania (19.1) rozpisujemy do postaci
,
h
16
3
y
x
4
h
2
3
y
3
s
4
2
2
2
4
2
(23)
gdzie:
.
F
/
s
0
Poszukujemy punktów istnienia ekstremów z równania
0
y
s
2
0
x
4
h
2
3
2
y
12
y
y
x
4
h
2
3
2
y
12
2
2
2
2
2
3
(24)
i stąd pierwiastki:
,
0
y
1
0
x
4
h
2
3
y
6
2
2
2
(25)
Będziemy mieli
0
y
y
3
1
jeśli wyraz wolny będzie równy zeru, a więc:
0
x
4
h
2
3
2
2
h
612
.
0
h
8
3
x
*
*
(26)
Wartość maksymalnego naprężenia zredukowanego jest osiągana dla
2
h
y
i zgodnie z (17) wynosi:
A
P
67
.
3
bh
P
3
3
2
h
h
8
3
bh
P
12
2
h
y
,
x
3
0
(27)
b) hipoteza TG
4
2
2
0
4
(28)
stąd:
2
2
2
2
2
2
0
y
4
h
4
y
x
4
F
(29)
A
P
3
2
h
,
x
0
,
x
,
h
5
.
0
x
*
0
*
0
*
(30)
Zamiast równania (23) otrzymujemy:
4
h
y
x
2
h
2
y
4
s
2
2
2
2
4
2
(31)
stąd:
0
y
x
2
h
4
y
12
0
y
s
2
2
3
2
(32)
,
h
707
.
0
h
2
1
x
(33)
A
P
25
.
4
2
h
y
,
x
*
*
0
(34)
Przykład 8
(wg Krzyś i Życzkowski [ 5 ], s.128
Belka stalowa o przekroju kołowym obciążona jest na swobodnym końcu siłą P jak na rys.2.
Wyznaczyć punkty, w których naprężenie zastępcze – według hipotezy energii odkształcenia
postaciowego – osiąga maksymalną wartość. Rozkład naprężeń przyjąć według teorii
elementarnej.
x
P
x
y
z
b ( y )
x z
x y
I
Rys. 5
Rozwiązanie:
Belka narażona jest na równoczesne zginanie i ścinanie. Zgodnie z teorią elementarną,
naprężenia od zginania wynoszą
z
z
x
I
y
M
(35)
od ścinania zaś (dla punktów na obwodzie koła) zgodnie z rys
cos
r
2
)
y
(
b
,
cos
xy
,
2
2
2
r
y
1
cos
,
3
3
I
z
cos
3
r
2
S
(patrz tablice)
2
z
I
z
xy
cos
A
Q
3
4
)
y
(
b
I
S
Q
,
r
y
1
A
Q
3
4
2
2
2
xz
2
xy
(36)
gdzie
.
r
A
,
4
r
I
,
P
Q
Px
M
2
4
z
z
Po podstawieniu obliczonych naprężeń do wzoru na naprężenie zredukowane
2
2
0
3
i
podnosząc stronami do kwadratu otrzymujemy:
ścinanie
2
2
4
2
2
zginanie
8
2
2
2
2
2
0
r
y
1
r
3
P
16
r
y
x
P
16
.
r
3
P
16
y
r
3
1
r
x
r
P
16
4
2
2
2
2
4
2
4
2
2
2
0
(37)
Oznaczając
C
r
3
P
16
B
r
3
1
r
x
r
P
16
4
2
2
2
4
2
4
2
2
(38)
możemy napisać
.
C
By
2
2
0
(39)
a) Gdy
,
0
B
czyli
0
r
3
1
r
x
2
4
2
,
577
.
0
3
3
r
r
x
(40)
naprężenie zastępcze osiąga największą wartość we włóknach skrajnych, tj. dla
r
y
i po
podstawieniu do wzoru (4) wynosi:
z
z
3
0
W
M
4
r
Px
)
r
,
x
(
(41)
gdzie
4
r
W
3
z
jest wskaźnikiem zginania. A zatem gdy
r
x
577
.
0
, dla wytężenia belki
rozstrzygający jest moment zginający.
b) Gdy B = 0, czyli
,
577
.
0
3
3
r
r
x
(42)
wówczas naprężenie zastępcze liczone ze wzoru (4) we wszystkich punktach na obwodzie przekroju
ma tę samą wartość
C
2
0
3
4
2
0
r
P
(43)
lub inaczej
,
3
W
M
max
z
z
0
(44)
gdzie
z
z
W
M
określa maksymalne naprężenie od zginania w rozpatrywanym przekroju, tj. dla
,
r
y
a
A
Q
3
4
max
(45)
maksymalne naprężenie od ścinania w linii obojętnej, tj. dla
.
0
y
c) Gdy wreszcie
,
0
A
czyli
,
577
.
0
3
3
r
r
x
(46)
naprężenie zastępcze przyjmuje największą wartość dla
.
0
y
, tj. w linii obojętnej, z uwagi na
zginanie i wynosi ze wzoru (4)
0
,
x
0
.
3
3
A
Q
3
4
3
r
P
4
0
,
x
max
2
0
(47)
Zatem jedynie gdy
,
577
.
0
r
x
o wytężeniu belki decyduje jej ścinanie.
Wyszukiwarka
Podobne podstrony:
ogniwo metanolowe by Slupski, Energetyka AGH, semestr 5, V Semestr, Konwersja Energii, LABORKI, Ćwi
ĆWICZENIA PRZESYŁ I DYSTRYBUCJA ENERGII ELEKTRYCZNEJ
Ćwiczenie to obudzi uśpioną energię życiową, bibliografia wschodu, bibliografia wschodu
Ćwiczenia 7 weryfikacja hipotez statystycznych
Ćwiczenie (37), 1.Hipoteza de Brogliea, 1
Metrologia - Pomiar mocy i energi elektrycznej, II ElektrycznyGrupa ćwiczeniowa 5
Odnawialne źródła energii drugi cykl ćwiczeń
praca energia, AGH górnictwo i geologia, II SEM, Fizyka I, ćwiczenia
Qi - energia zdrowia, Qi Gong - Tai Chi - ćwiczenia medytacyjno-uzdrawiające
Ćwiczenia równoważne- hipoterapia, HIPOTERAPIA, Hipoterapia (pościągane)
Ćwiczenia ułatwiaj±ce skupienie uwagi i energii
Ogniwo paliwowe metanolowo - powietrzne, Energetyka AGH, semestr 5, V Semestr, Konwersja Energii, L
Straty energii 13 14 1, Prywatne, EN-DI semestr 4, Elektroenergetyka, wykład + ćwiczenia
cw testowanie hipotez2, Ćwiczenia 7
Przykłady hipotez do przetestowania, Psychologia, Statystyka, psychometria, ćwiczeniówki
więcej podobnych podstron