Ćwiczenie 4
NAPĘD Z SILNIKIEM BEZSZCZOTKOWYM PRĄDU STAŁEGO
1.
CEL I ZAKRES ĆWICZENIA
Celem
ćwiczenia
jest
zapoznanie
się
z działaniem
i właściwościami
bezszczotkowego silnika prądu stałego z magnesami trwałymi BLDCM (ang.
Brushless DC Motor).
Zakres ćwiczenia obejmuje wyznaczenie charakterystyk statycznych układu
napędowego pracującego z różnymi wariantami sterowania oraz obserwację
przebiegów czasowych wybranych wielkości w stanach dynamicznych.
2.
WPROWADZENIE TEORETYCZNE
Silnik bezszczotkowy prądu stałego z
uwagi na konstrukcję należy do rodziny
maszyn synchronicznych wzbudzanych
magnesami trwałymi.
Maszyny te dzielą się na dwie grupy:
•
maszyny
o
sinusoidalnym
rozkładzie SEM rotacji, zwane
silnikami
synchronicznymi
z magnesami trwałymi (PMSM),
•
maszyny
z trapezowym
rozkładem SEM rotacji, zwane
silnikami
bezszczotkowymi
prądu stałego (BLDCM).
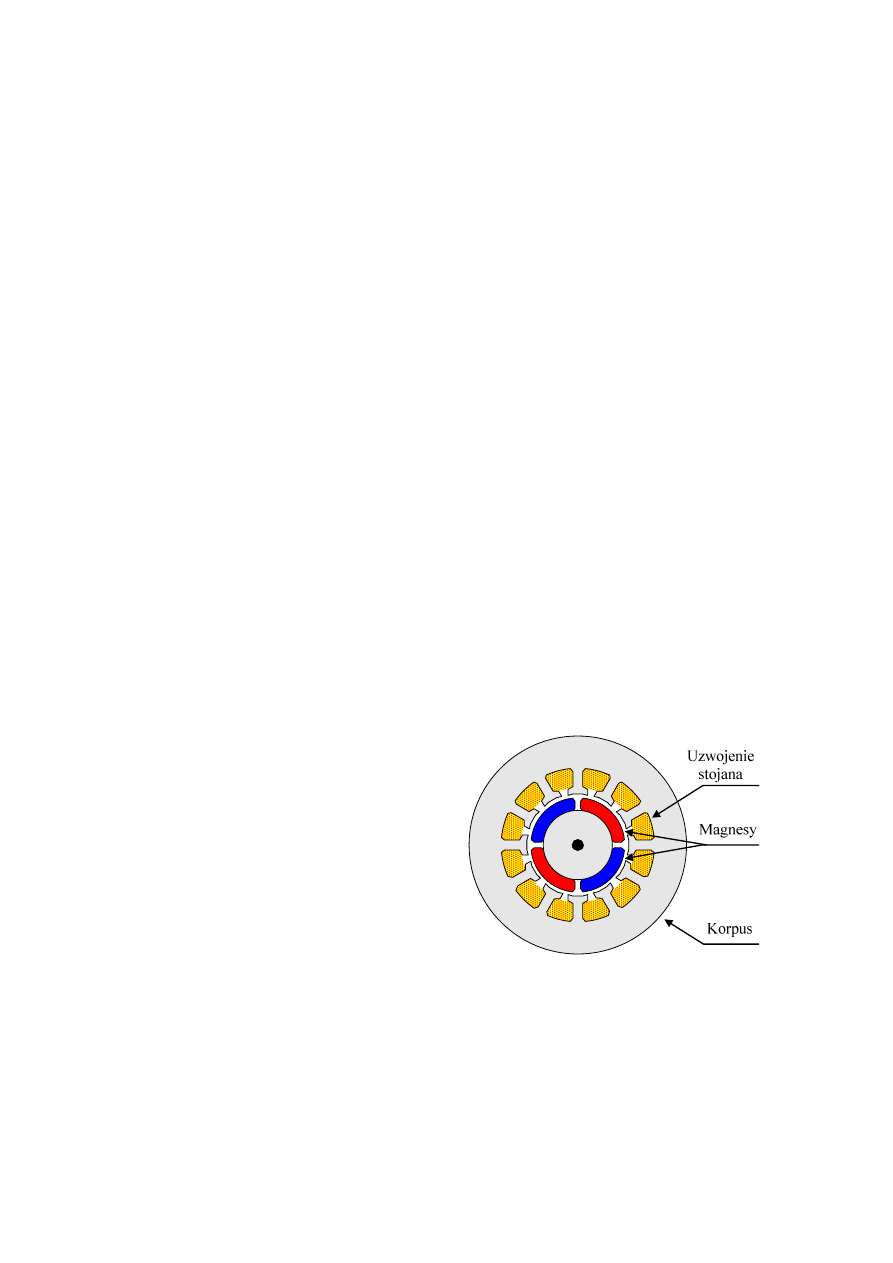
Rys. 4.1
Budowa silnika bezszczotkowego
BLDCM
Napęd elektryczny
2.1.
Zasada działania silnika BLDCM
Niniejsze ćwiczenie dotyczy silnika drugiego rodzaju. Konstrukcja silnika
bezszczotkowego jest odwrotna w stosunku do klasycznego silnika obcowzbudnego
(rys. 4.1).
a)
b)
B
A
C
U
DC
d
q
q
d
I
C
I
B
I
M
Ψ
e
γ
m
in
γ
γ
m
ax
ω
I
DC
Ψ
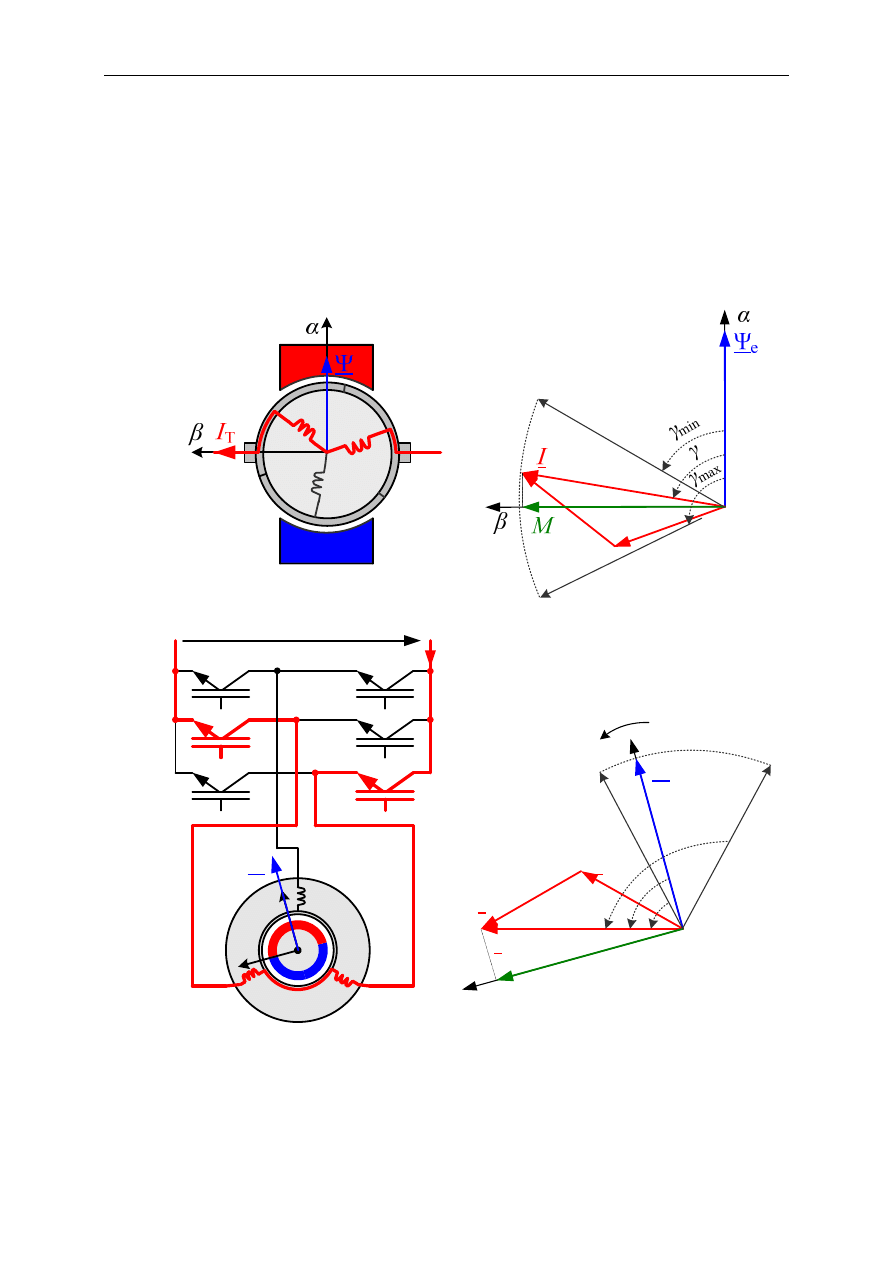
Rys. 4.2 Analogie między silnikiem prądu stałego z trzema działkami komutatora (a ) a silnikiem
BLDCM (b)
Napęd z silnikiem bezszczotkowym…
3
Rolę wzbudzenia pełnią magnesy trwałe umieszczone w wirniku, natomiast
twornik stanowi uzwojenie stojana rozłożone w żłobkach i połączone w trójkąt lub
gwiazdę. Umieszczenie w części wirującej maszyny magnesów trwałych zlikwidowało
kłopoty związane z dostarczeniem prądu do wirnika Brak komutatora mechanicznego
prowadzi do szeregu udogodnień: znacznie upraszcza konserwację, zwiększa
przeciążalność momentem, zmniejsza ilość zakłóceń elektromagnetycznych.
Zasada działania silnika BLDCM zostanie opisana przez porównanie do silnika
obcowzbudnego
z trzema
wycinkami
komutatora
(rys. 4.2).
Moment
elektromagnetyczny jest iloczynem wektorowym strumienia magnetycznego i prądu
twornika, stąd maksymalny moment powstaje, gdy kąt pomiędzy wektorami
strumienia i prądu wynosi 90
o
. W silniku obcowzbudnym ustawienie to zapewnia
komutator (rys. 4.2a ).
Odpowiednie przesunięcie między strumieniem a prądem zapewnione jest
w silniku bezszczotkowym (rys. 4.2b) przez odpowiednie zasilenie uzwojenia stojana.
W tym celu stosuje się przekształtnik energoelektroniczny, zwany komutatorem
elektronicznym, którego zadaniem jest przełączanie napięcia stałego pomiędzy
uzwojeniami. Zawsze zasilane są dwa uzwojenia, trzecie pozostaje odłączone.
W wersji podstawowej struktura przekształtnika zawiera trzy półmostki tranzystorowe
(po jednym dla każdej fazy), tworzące grupy: anodową i katodową. Chwile przełączeń
zaworów muszą być zsynchronizowane z aktualnym położeniem wirnika. Ze względu
a)
b)
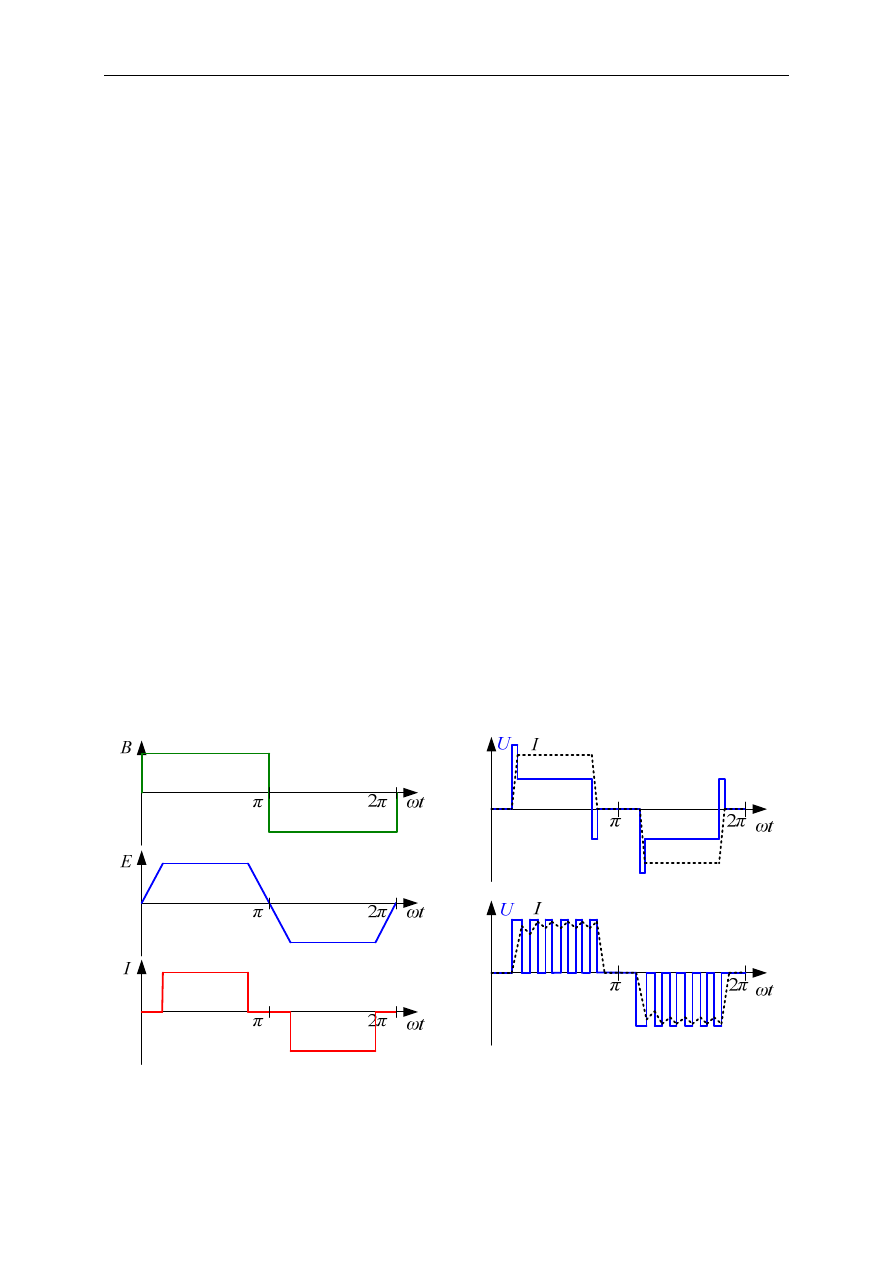
Rys. 4.3 Rozkład indukcji magnetycznej B, SEM
rotacji E oraz prądu I w silniku BLDCM
Rys. 4.4 Przebieg napięcia U i prądu I jednej fazy
stojana w przypadku zasilania z falownika prądu (a)
lub z falownika napięcia z modulacją MSI (b)
Napęd elektryczny
na trapezowy rozkład SEM rotacji wystarczająca jest informacja o położeniu wirnika
z dokładnością do 60
o
. W tym celu stosuje się hallotronowe czujniki położenia wirnika
(CPW). Na podstawie sygnałów z CPW układ logiczny steruje pracą zaworów
przekształtnika.
Trapezowy kształt siły elektromotorycznej rotacji determinuje kształt prądu, jakim
należy zasilić uzwojenia stojana. Aby uzyskać największy i najbardziej wygładzony
przebieg momentu, prądy fazowe powinny mieć kształt prostokątny i nakładać się
na płaskie obszary SEM rotacji (rys. 4.3). W rzeczywistości kształt prądu jest zbliżony
do prostokątnego i zależy od rodzaju zasilania (źródło prądu lub falownik napięcia
MSI – rys. 4.4).
2.2.
Sterowanie prędkością silnika BLDCM
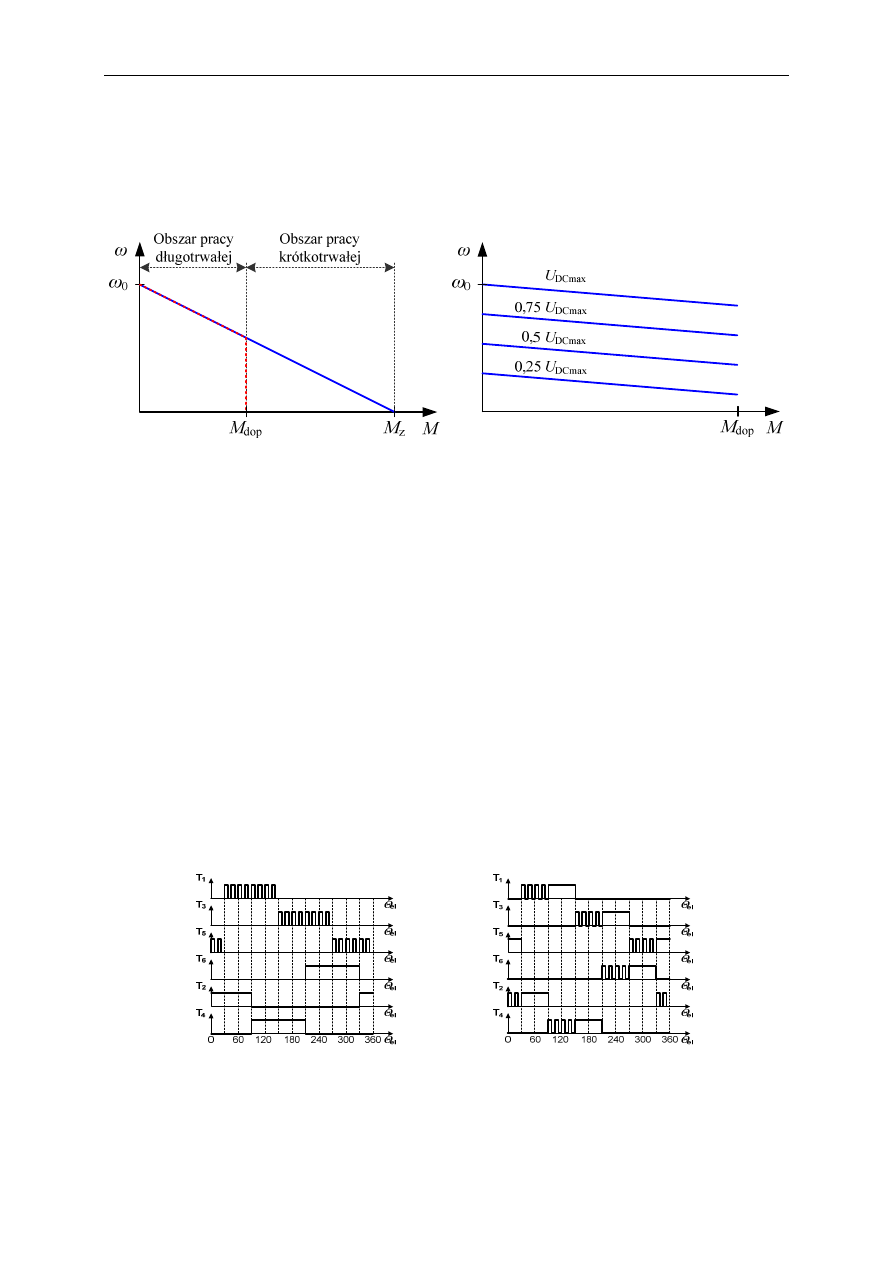
Właściwości ruchowe silnika BLDCM określa charakterystyka zewnętrzna
(moment w funkcji prędkości – rys. 4.5.). Podobnie jak w klasycznym silniku prądu
stałego jest ona prostoliniowa. Początek i koniec określają odpowiednio: prędkość
biegu jałowego ω
0
oraz moment zwarcia M
z
. Dowolny punkt na charakterystyce
opisuje następująca zależność:
−
⋅
=
z
0
1
M
M
ω
ω
,
(4.1)
gdzie: ω – prędkość, M – moment elektromagnetyczny,
Wyróżniamy dwa obszary pracy: obszar pracy długotrwałej oraz obszar pracy
krótkotrwałej. Charakterystyka elektromechaniczna (zaznaczona czerwoną przerywaną
linią na rysunku 4.5) stanowi granicę obszaru pracy długotrwałej. Rysunek 4.5b
przedstawia wpływ napięcia zasilającego na charakterystykę zewnętrzną. Widoczna
jest możliwość sterowania prędkością za pomocą napięcia przyłożonego do uzwojeń
stojana.
Napięcie zasilające silnik można regulować na dwa podstawowe sposoby:
za pomocą dodatkowego przekształtnika DC/DC i z komutatorem elektronicznym
w topologii falownika prądu, lub poprzez modulację szerokości impulsów MSI
zaworami komutatora elektronicznego w topologii falownika napięcia FN-MSI.
Regulację poprzez dodatkowy przekształtnik DC/DC stosuje się głównie w układach
bardzo małej mocy oraz w przypadku zasilania silników BLDCM wysokoobrotowych,
w których częstotliwość przełączeń wynikająca ze zmian położenia wirnika jest na tyle
duża, że trudne staje się „nałożenie” dodatkowej wyższej częstotliwości związanej
z potrzebą modulacji szerokości impulsów napięcia zasilającego silnik. W drugim
Napęd z silnikiem bezszczotkowym…
5
rozwiązaniu komutator pełni dwie funkcje: synchronizacji z polem wirnika i regulacji
napięcia wyjściowego (i wynikającej z tego prędkości obrotowej).
a)
b)
Rys. 4.5 Charakterystyka zewnętrzna ω = f(M) (a), wpływ napięcia zasilającego (b)
W zależności od wykorzystania zaworów komutatora stosuje się różne odmiany
sterowania wykorzystujące modulację szerokości impulsów. Rysunek 6 przedstawia
dwa przykładowe rozwiązania: realizację procesu modulacji jedynie w tranzystorach
grupy anodowej (strategia typu 120Q+, rys. 4.6a) oraz realizację modulacji
z wykorzystaniem
wszystkich
tranzystorów
przez
pierwszą
połowę
czasu
przewodzenia (strategia typu 60Q+, rys.
4
.
6
b). Innymi rozwiązaniami są: regulacja
napięcia z wykorzystaniem zaworów grupy katodowej (120Q-), regulacja napięcia
w każdym z tranzystorów przez drugą połowę ich czasu przewodzenia (60Q-) lub
z wykorzystaniem wszystkich tranzystorów z modulacją realizowaną w całym okresie
ich przewodzenia (sterowanie bipolarne).
a)
b)
Rys. 4.6 Sygnały sterujące tranzystorami podczas regulacji prędkości metodą 120Q+ (a)
oraz 60Q+ (b)
Napęd elektryczny
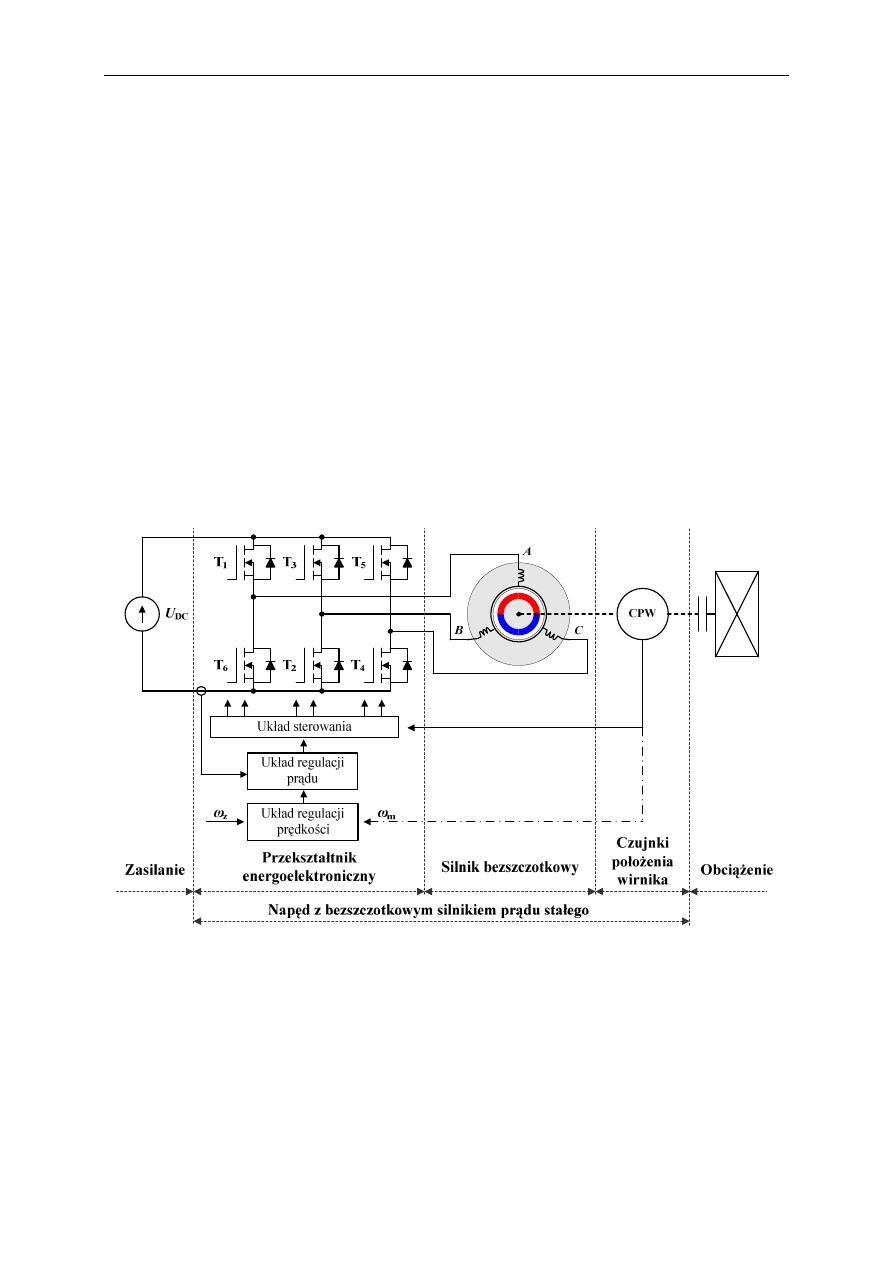
Schemat
układu
napędowego
z silnikiem
bezszczotkowym
BLDCM
przedstawiono na rysunku 4.7. Regulacja prędkości może odbywać się w układzie
otwartym (zmiana napięcia za pomocą zmiany wypełnienia sygnałów sterujących
tranzystorami) lub zamkniętym (struktura kaskadowa z wewnętrznym regulatorem
prądu silnika i zewnętrznym regulatorem prędkości). Pierwsze rozwiązanie nie
wymaga stosowania sprzężenia zwrotnego od prędkości, jednak nie zapewnia
stabilizacji prędkości przy zmianach obciążenia silnika. W przypadku układu
zamkniętego konieczna jest informacja o prędkości obrotowej z dodatkowego czujnika
prędkości (np. enkodera) lub odtworzenie prędkości z sygnału z hallotronowego
czujnika położenia wału. W ostatnich latach rozwijane są także metody sterowania
umożliwiające
zrezygnowanie
z czujnika
położenia
wirnika
(tzw. metody
bezczujnikowe), w których do wyznaczania położenia i prędkości wykorzystuje się
inne sygnały (np. napięcia i prądy).
Rys. 4.7
Schemat blokowy układu napędowego z silnikiem bezszczotkowym prądu stałego BLDCM
Podsumowując, do zalet silnika bezszczotkowego prądu stałego należą:
•
duża niezawodność, długie okresy pomiędzy przeglądami,
•
duża dynamika – mała bezwładność wirnika z magnesami trwałymi,
•
sztywna charakterystyka moment-prędkość,
Napęd z silnikiem bezszczotkowym…
7
•
małe zakłócenia elektromagnetyczne – brak iskrzenia na styku szczotka-
komutator,
•
dobry stosunek mocy do objętości – konieczność odprowadzania ciepła
tylko ze stojana umożliwia zmniejszenie gabarytów silnika,
•
duża przeciążalność momentem.
Do wad zalicza się:
•
konieczność stosowania przekształtnika energoelektronicznego,
•
tętnienia momentu, wynikające głównie ze zjawiska komutacji,
•
gorsze
właściwości
podczas
pracy
z najmniejszymi
prędkościami
(w porównaniu do maszyny synchronicznej z magnesami trwałymi).
Silniki BLDCM znajdują zastosowanie np. w napędach trakcyjnych ze względu
na stosunkowo wysoką przeciążalność, dużą objętościową i masową gęstość mocy.
Zakres mocy obejmuje wartości od kilku watów do dziesiątek kilowatów.
3.
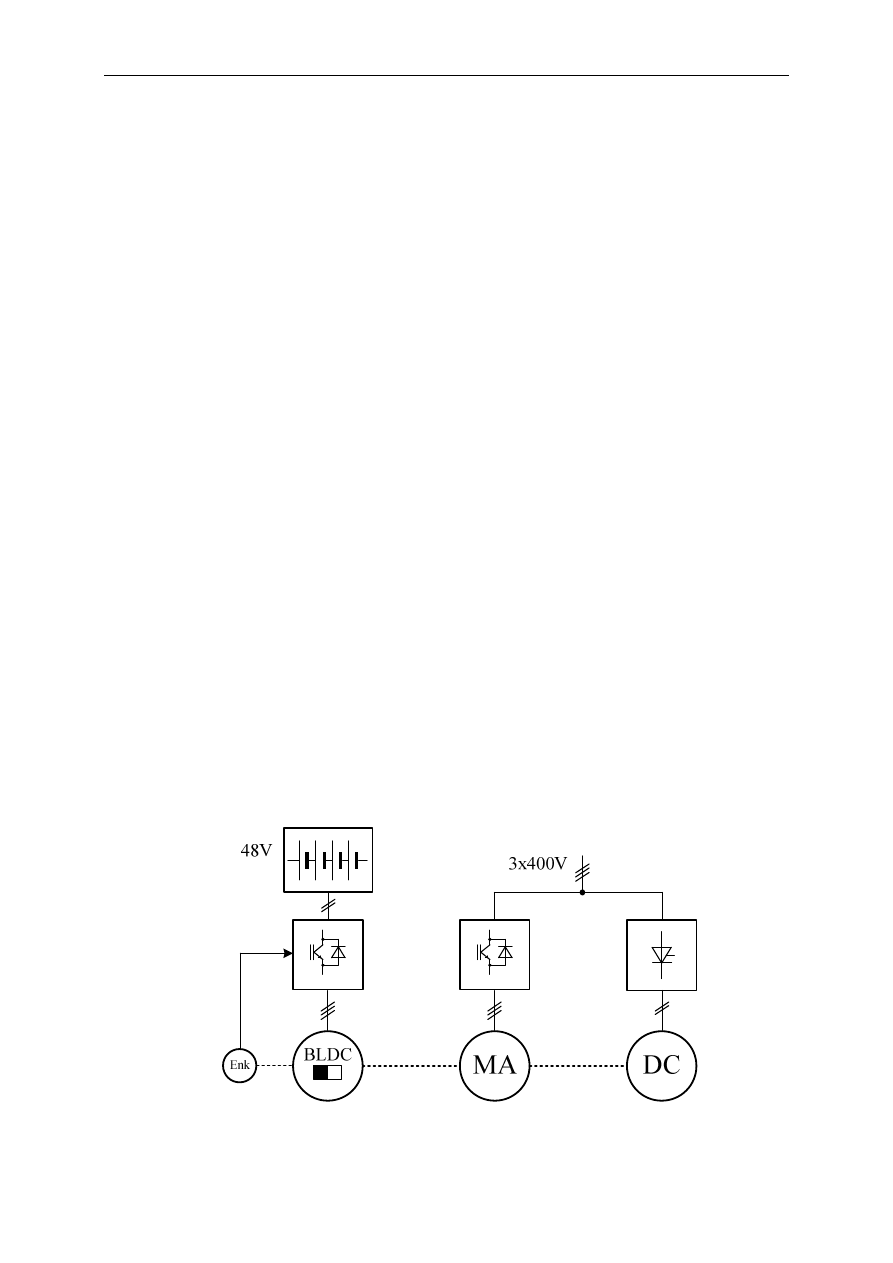
STANOWISKO LABORATORYJNE
Ćwiczenie odbywa się na uniwersalnym stanowisku laboratoryjnym (rys. 4.8),
umożliwiającym badanie silnika bezszczotkowego zarówno z trapezową (BLDCM),
jak i z sinusoidalną (PMSM) SEM rotacji. Ponadto na stanowisku znajdują się: silnik
prądu stałego i silnik asynchroniczny, które mogą służyć w charakterze obciążenia
silnika bezszczotkowego. Badany silnik zasilany jest z baterii akumulatorów
trakcyjnych poprzez dedykowany przekształtnik energoelektroniczny (komutator
elektroniczny).
Rys. 4.8 Schemat układu laboratoryjnego

Napęd elektryczny
4.
PRZEBIEG ĆWICZENIA
Program
ćwiczenia
obejmuje
przebadanie
właściwości
statycznych
i dynamicznych układu napędowego z silnikiem bezszczotkowym prądu stałego.
Właściwości statyczne określone są grupą odpowiednich charakterystyk, wliczając
w to najważniejszą - charakterystykę mechaniczną n = f(M). W ćwiczeniu należy
wyznaczyć następujące charakterystyki:
•
dla sterowania w układzie otwartym – regulacja napięcia metodą PWM:
n = f(M), I
S
= f(M), U
BAT
= f(M),
•
dla sterowania w układzie zamkniętym (praca z nadrzędnym regulatorem
prędkości): D = f(M), I
S
= f(M), U
BAT
= f(M), gdzie D - wypełnienie.
W celu uzupełnienia opisu właściwości statycznych należy dla obu przypadków
zarejestrować wybrane przebiegi napięć i prądów silnika.
W celu przebadania właściwości dynamicznych napędu należy zaobserwować
przebiegi prędkości i prądu podczas rozruchu i nawrotu oraz podczas skokowej
zmiany momentu obciążenia.
W sprawozdaniu z przeprowadzonego ćwiczenia należy zamieścić wyniki
przeprowadzonych pomiarów (zgodnie z poleceniem prowadzącego, w postaci
tabelarycznej i wykreślnej) oraz otrzymane przebiegi czasowe. Wyniki badań,
np. różnice w odniesieniu do modelu teoretycznego, należy skomentować we
wnioskach.
5.
LITERATURA
1.
Dote Y., Kinoshita S.: Brushless Servomotors, Fundamental and Applications,
Clarendon Press, Oxford, 1990
2.
Glinka T.: Mikromaszyny elektryczne wzbudzane magnesami trwałymi,
Wydawnictwo Politechniki Śląskiej, Gliwice, 1995.
3.
Miller T.J.E.: Brushless Permanent-Magnet and Reluctance Motor Drives,
Clarendon Press, Oxford, 1989.
4.
Krishnan R.: Electric Motor Drives, Modeling, Analysis and Control, Prentice
Hall, New Jersey, 2001.
5.
Zawirski K.: Sterowanie silnikiem synchronicznym o magnesach trwałych,
Wydawnictwo Politechniki Poznańskiej, 2005
Wyszukiwarka
Podobne podstrony:
Badanie silnika obcowzbudnego prądu stałego, SILNIKI ELEKTRYCZNE, Napęd elektryczny
Sprawozdanie Silnik wykonawczy prądu stałego
antal,elektrotechnika, Silnik bocznikowy prądu stałego
Silnik szeregowy prądu stałego , LABORATORIUM MASZYN ELEKTRYCZNYCH
dudziński,układy napędowe,Charakterystyki mechaniczne silnika szeregowego prądu stałego
Maszyny Elektryczne 2 (sem IV) Zasada działania silnika i prądnicy prądu stałego
5 Silnik bocznikowy pradu stalego
fizyka, Zastosowanie silnika elektrycznego prądu stałego, Zastosowanie silnika elektrycznego pr&scar
Silnik Elektryczny prądu stałego
Badanie silnika szeregowego prądu stałego, Studia, sprawozdania, sprawozdania od cewki 2, Dok 2, Dok
SILNIK BOCZNIKOWY- 3.2 moje, Inzynieria Materiałowa, I semestr, Elektrotechnika, elektrotechnika, 3.
23 Sposoby regulacji predkosci obrotowej silnika bocznikowego pradu stalego
sprawko elektronika silnik szeregowy pradu stalegoMODIFIX
10 Silnik obcowzbudny pradu stalego zasilany z przeksztaltnika tranzystorowego
3, Inzynieria Materiałowa, I semestr, Elektrotechnika, elektrotechnika, 3.2 BADANIE SILNIKA BOCZNIKO
Silnik szeregowy prądu stałego, ۞ Nauka i Technika, Elektrotechnika, Maszyny elektryczne
dudziński,układy napędowe,Metody i układy hamowania elektrycznego silnika obcowzbudnego prądu stałeg
więcej podobnych podstron