Sztuczne sieci neuronowe
Małgorzata Kr towska
Katedra Oprogramowania
e-mail: mmac@ii.pb.bialystok.pl
Wykład 4: Algorytmy optymalizacji
Sztuczne sieci neuronowe
2
Plan wykładu
• Algorytmy gradientowe optymalizacji
– Algorytm najwi kszego spadku
– Algorytm zmiennej metryki
– Algorytm gradientów sprz onych
• Algorytmy doboru współczynnika uczenia
– adaptacyjny dobór współczynnika uczenia
– dobór współczynnika przez minimalizacj kierunkow
– reguła delta-bar-delta
– metoda gradientów sprz onych z regularyzacj
• Algorytmy heurystyczne
– algorytm Quickprop
– algorytm RPROP
Sztuczne sieci neuronowe
3
Uczenie z nauczycielem
• Minimalizacja funkcji celu E
• Zakładaj c ci gł funkcj aktywacji, minimalizacja odbywa si
metodami gradientowymi
• W ka dym kroku uczenia wyznacza si tzw. kierunek minimalizacji p
(W(k))
• Korekcja wag odbywa si według wzoru:
gdzie
η jest współczynnikiem uczenia z przedziału [0, 1].
))
(
(
)
(
)
1
(
k
W
p
k
W
k
W
η
+
=
+
Sztuczne sieci neuronowe
4
Algorytmy gradientowe optymalizacji
Algorytmy gradientowe bazuj na rozwini ciu w szereg Taylora funkcji
celu E(
W) w najbli szym s siedztwie znanego rozwi zania W=
[w
1
,w
2
, ..., w
n
]
T
(na starcie algorytmu jest to punkt pocz tkowy W
0
):
gdzie:
+
+
+
=
+
p
W
H
p
p
W
g
W
E
p
W
E
T
T
)
(
2
1
)]
(
[
)
(
)
(
T
n
W
E
W
E
W
E
E
W
g
∂
∂
∂
∂
∂
∂
=
∇
=
,
,
,
)
(
2
1
∂
∂
∂
∂
∂
∂
∂
∂
∂
∂
∂
∂
=
n
n
n
n
W
W
E
W
W
E
W
W
E
W
W
E
W
H
1
1
1
1
)
(
Sztuczne sieci neuronowe
5
Algorytmy gradientowe optymalizacji
• Punkt W=W
k
jest punktem optymalnym funkcji E(W), je li
– g(W
k
)=0
– hesjan H(W
k
) jest dodatnio okre lony
• W praktyce ( ze wzgl du na na sko czon dokładno oblicze ) zakłada
si , e punkt W
k
jest punktem optymalnym, je eli:
gdzie
τ przyj ta dokładno oblicze
(
)
(
)
(
)
)
(
1
)
(
1
)
(
1
)
(
)
(
3
1
1
k
k
k
k
k
k
k
k
W
E
W
g
W
W
W
W
E
W
E
W
E
+
≤
+
≤
−
+
≤
−
−
−
τ
τ
τ
Sztuczne sieci neuronowe
6
Ogólny algorytm optymalizacji
Zakładamy W
0
=W
k
• Test: je eli W
k
spełnia warunki testowe jest punktem optymalnym to
ko czymy obliczenia, w przeciwnym przypadku pkt. 2
• Wyznaczanie wektora kierunku poszukiwa p
k
w punkcie W
k
.
• Minimalizacja kierunkowa funkcji E(W) na kierunku p
k
w celu
wyznaczenia takiej warto ci
η
k
, aby E(W
k
+
η
k
p
k
) < E(W
k
)
• Wyznaczenie nowego rozwi zania W
k+1
=W
k
+
η
k
p
k
oraz odpowiadaj cej
mu warto ci E(W
k
), g(W
k
) ( i ew. H(W
k
)) i powrót do pkt 1.
Ró nice: wyznaczanie kierunku poszukiwa p oraz kroku
η.
Sztuczne sieci neuronowe
7
Algorytm najwi kszego spadku
Ograniczenie do liniowego przybli enia funkcji E(W) w najbli szym
s siedztwie znanego rozwi zania W:
aby E(W
k+1
)<E(W
k
) wystarczy aby [g(W
k
)]
T
p < 0
Wektor kierunkowy w metodzie najwi kszego spadku przyjmuje posta :
p
k
=-g(W
k
)
)
(
)]
(
[
)
(
)
(
2
h
O
p
W
g
W
E
p
W
E
T
+
+
=
+
Sztuczne sieci neuronowe
8
Algorytm najwi kszego spadku
• Podej cie klasyczne
• Metoda momentu
Uwagi:
– na płaskich odcinkach
(dla =0.9 oznacza to 10 krotne przyspieszenie procesu uczenia)
– pozwala na wyj cie z minimów lokalnych
– nale y kontrolowa warto E
k
k
k
W
W
W
∆
+
=
+1
k
k
p
W
η
=
∆
)
(
1
−
−
+
=
∆
k
K
k
k
W
W
p
W
α
η
k
k
p
W
α
η
−
=
∆
1
Sztuczne sieci neuronowe
9
Algorytm najwi kszego spadku
Wykres wpływu działania momentu na proces uczenia
• Metoda „weight decay”
zabezpiecza przez zbytnim wzrostem wag
k
k
k
W
p
W
β
η
−
=
∆
k
k
k
W
p
W
β
η
−
=
∆
Sztuczne sieci neuronowe
10
Algorytm zmiennej metryki (quasi-Newtona)
Kwadratowe przybli enie funkcji E(W) w s siedztwie znanego
rozwi zania W
k
:
kierunek p jest wyznaczony ze wzoru:
Problemy:
– wymóg dodatniej okre lono ci hesjanu w ka dym kroku
Rozwi zanie
– zastosowanie przybli enia hesjanu przy u yciu metody zmiennej metryki
)
(
)
(
2
1
)]
(
[
)
(
)
(
3
h
O
p
W
H
p
p
W
g
W
E
p
W
E
T
T
+
+
+
=
+
)
(
)]
(
[
1
k
k
k
W
g
W
H
p
−
−
=
Sztuczne sieci neuronowe
11
Algorytm zmiennej metryki (quasi-Newtona)
Przybli enie hesjanu polega na modyfikacji hesjanu z kroku poprzedniego
o pewn poprawk , która powoduje, e aktualna warto hesjanu G(W
k
)
przybli a krzywizn funkcji celu E zgodnie z zale no ci :
G(W
k
)(W
k
-W
k-1
)=g(W
k
)-g(W
k-1
)
Na podstawie powy szego zało enia mo na otrzyma wzory okre laj ce
hesjan w kroku k-tym:
gdzie s
k
=W
k
-W
k-1
;
r
k
=g(W
k
)-g(W
k-1
);
V
l
=[G(W
k
)]
-1
.
k
T
k
T
k
k
k
k
T
k
k
k
T
k
T
k
k
k
T
k
k
k
T
k
k
k
r
s
s
r
V
V
r
s
r
s
s
s
r
s
r
V
r
V
V
1
1
1
1
1
−
−
−
−
+
−
+
=
Sztuczne sieci neuronowe
12
Algorytm zmiennej metryki (quasi-Newtona)
• warto startowa V
0
=1
• pierwsza iteracja zgodnie z algorytmem najwi kszego spadku
• odtwarzana macierz hesjanu jest w ka dym kroku dodatnio okre lona
(st d g(W
k
)=0 odpowiada rozwi zaniu problemu optymalizacji)
• metoda uwa ana za jedn z najlepszych metod optymalizacji funkcji
wielu zmiennych
Wady:
• stosunkowo du a zło ono obliczeniowa (n
2
elementów hesjanu)
• du e wymagania co do pami ci przy przechowywaniu macierzy hesjanu
Sztuczne sieci neuronowe
13
Metoda gradientów sprz onych
• rezygnacja z bezpo redniej informacji o hesjanie
• nowy kierunek poszukiwa ma by ortogonalny i sprz ony z poprzednim
kierunkami p
0
, p
1
, ..., p
k-1
, st d:
co mo na upro ci do postaci:
współczynnik sprz enia (g
k
=g(W
k
)):
Zbiór wektorów p
i
jest wzajemnie sprz ony wzgl dem macierzy H, je eli
−
=
+
−
=
1
0
)
(
k
j
j
kj
k
k
p
W
g
p
β
1
1
)
(
−
−
+
−
=
k
k
k
k
p
W
g
p
β
1
1
1
1
)
(
−
−
−
−
−
=
k
T
k
k
k
T
k
k
g
g
g
g
g
β
j
i
Hp
p
j
T
i
≠
= ,
0
Sztuczne sieci neuronowe
14
Metoda gradientów sprz onych
• metoda mniej skuteczna od metody zmiennej metryki, ale bardziej
skuteczna ni metoda najwi kszego spadku
• stosuje si j do optymalizacji przy bardzo du ej liczbie zmiennych
• ze wzgl du na bł dy zaokr gle w trakcie zatraca si własno
ortogonalno ci mi dzy wektorami kierunków minimalizacji. Po
wykonaniu n iteracji przeprowadza si jej ponowny start ( w I kroku
zgodnie z algorytmem najwi kszego spadku)
Sztuczne sieci neuronowe
15
Metody doboru współczynnika uczenia
Po okre leniu wła ciwego kierunku p
k
minimalizacji, nale y dobra
odpowiedni warto współczynnika uczenia, aby nowy punkt W
k+1
le ał mo liwie najbli ej minimum funkcji E(W) na kierunku p
k
k
k
k
k
p
W
W
η
+
=
+1
Sztuczne sieci neuronowe
16
Stały współczynnik uczenia
• Stały współczynnik uczenia
– stosuje si głównie w poł czeniu z metod najwi kszego spadku
– sposób najmniej efektywny, gdy nie uzale nia warto ci współczynnika od
od wektora gradientu oraz kierunku poszukiwa
p w danej iteracji
– algorytm ma skłonno utykania w minimach lokalnych
– cz sto dobór współczynnika odbywa si oddzielnie dla ka dej warstwy,
przyjmuj c
gdzie n
i
liczba wej i-tego neuronu w warstwie
≤
i
n
1
min
η
Sztuczne sieci neuronowe
17
Adaptacyjny dobór współczynnika uczenia
• zmiany współczynnika uczenia dopasowuj si do aktualnych zmian
warto ci funkcji celu w czasie. Warto bł du
ε w i-tej iteracji:
okre la strategi zmian warto ci współczynnika uczenia.
• Przyspieszenie procesu uczenia uzyskuje si poprzez ci głe zwi kszanie
współczynnika
η sprawdzaj c jednocze nie czy nie zacznie wzrasta w
porównaniu z bł dem obliczonym przy poprzedniej warto ci
η
(
)
=
−
=
M
j
j
j
d
y
1
2
ε
Sztuczne sieci neuronowe
18
Adaptacyjny dobór współczynnika uczenia
Adaptacja współczynnika uczenia:
gdzie:
ε
i-1
,
ε
i
- bł d odpowiednio w (i-1)-szej iteracji oraz w i-tej iteracji
η
i-1
;
η
i
- współczynnik uczenia w kolejnych iteracjach
k
w
- dopuszczalny współczynnik wzrostu bł du
ρ
d
- współczynnik zmniejszania warto ci
ρ
i
- współczynnik zwi kszaj cy warto
Przykładowe warto ci współczynników: k
w
= 1,04;
ρ
d
=0.7;
ρ
i
= 1.05
≤
>
=
−
−
+
1
1
1
i
w
i
i
i
i
w
i
d
i
i
k
gdy
k
gdy
ε
ε
ρ
η
ε
ε
ρ
η
η
Sztuczne sieci neuronowe
19
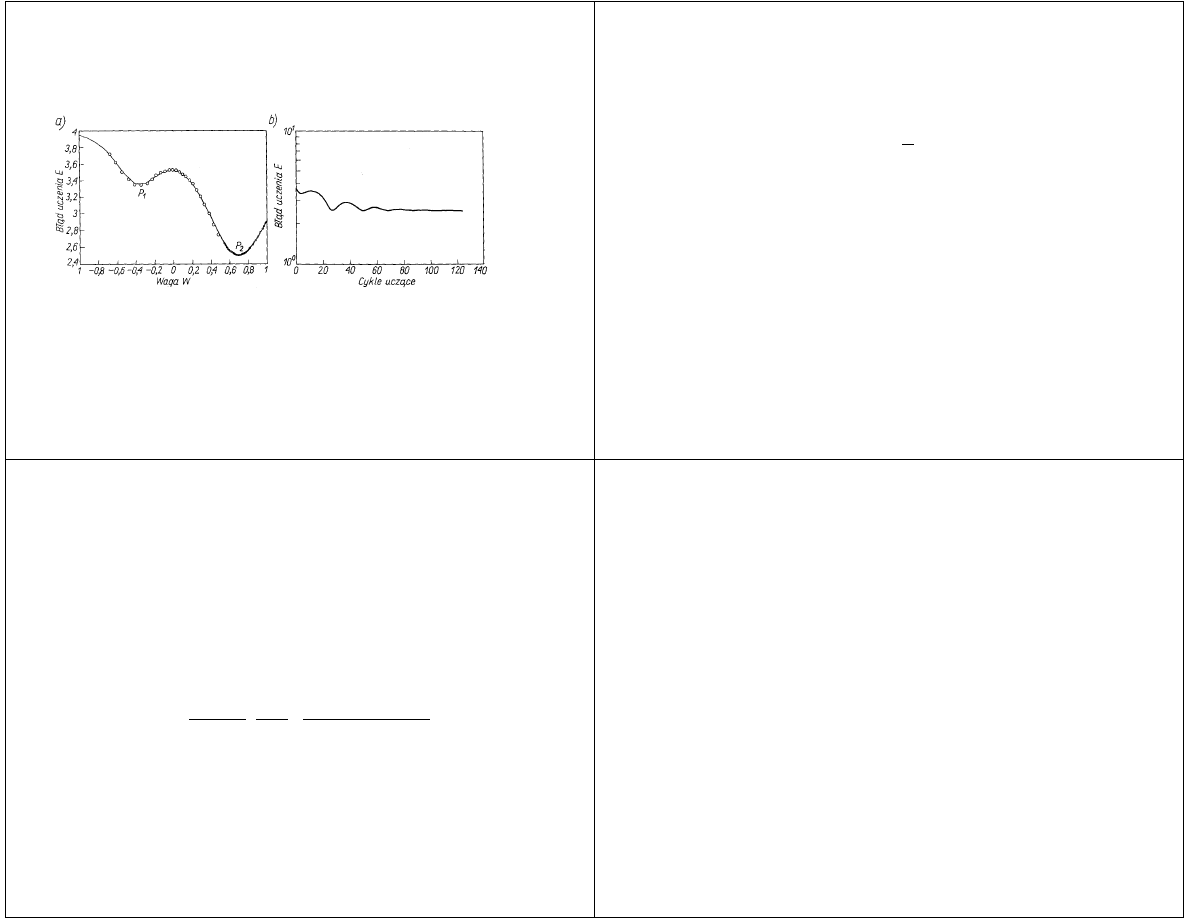
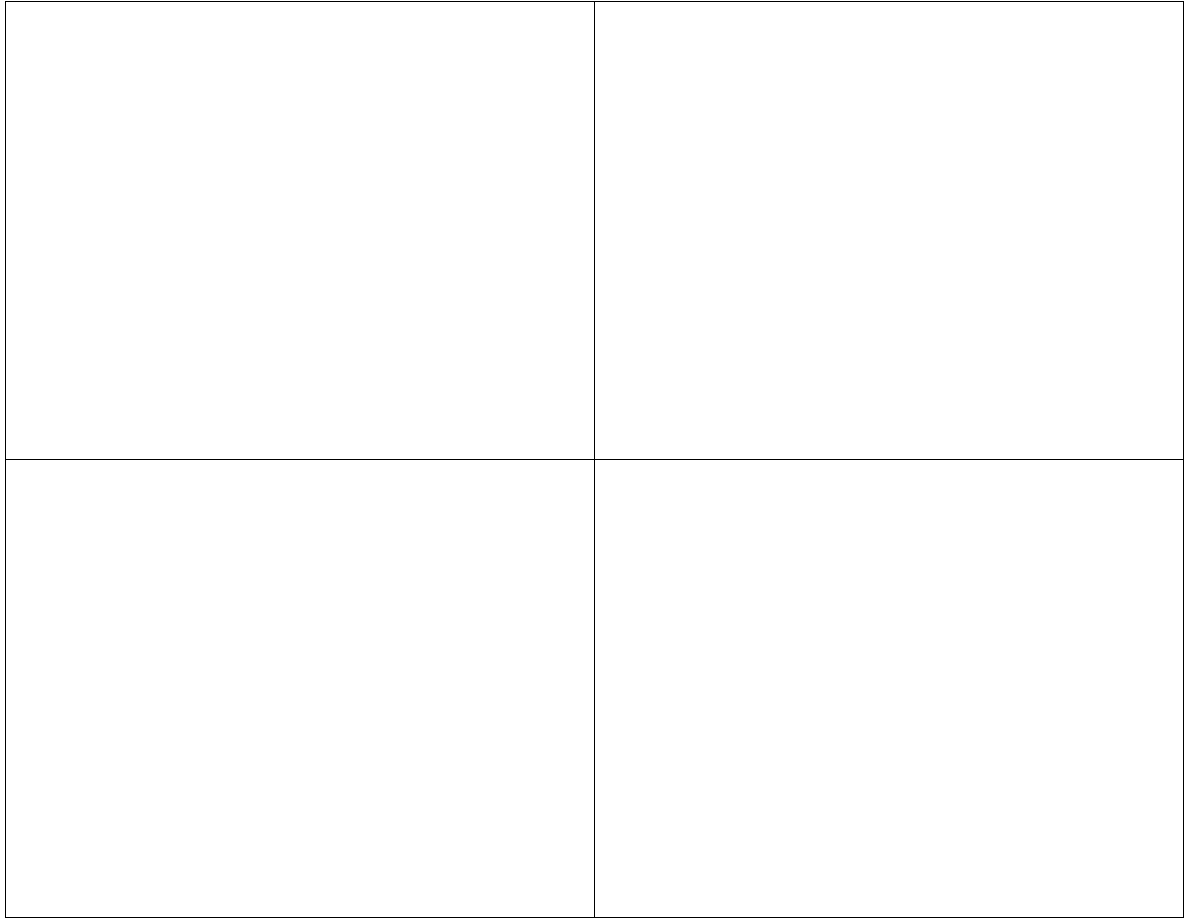
Adaptacyjny dobór współczynnika uczenia
Wpływ adaptacyjnego doboru współczynnika uczenia na proces uczenia
Sztuczne sieci neuronowe
20
Dobór współczynnika uczenia przez
minimalizacj kierunkow
• Polega na minimalizacji kierunkowej funkcji celu na wyznaczonym
wcze niej kierunku p
k
.
• Cel: takie dobranie warto ci η
k
aby nowy punkt W
k+1
=W
k
+
η
k
p
k
odpowiadał minimum funkcji celu na danym kierunku
– Je eli η
k
odpowiada dokładnie minimum funkcji na danym kierunku p
k
to
pochodna kierunkowa w punkcie W
k+1
=W
k
+
η
k
p
k
musi by równa 0
• W praktyce wyznaczony punkt W
k+1
odpowiada tylko w przybli eniu
rzeczywistemu punktowi minimalnemu na danym kierunku.
Sztuczne sieci neuronowe
21
Dobór współczynnika uczenia przez
minimalizacj kierunkow
W celu „regulacji” dokładno ci wyznaczenia współczynnika uczenia
wprowadza si współczynnik 0<
γ
2
<1, który stanowi ułamek pochodnej
funkcji celu na kierunku p
k
w punkcie wyj ciowym W
k
.
Algorytm pozwalaj cy na wyznaczenie optymalnej warto ci
η
k
przeprowadza si dopóty, dopóki spełnione s nast puj ce warunki:
oraz
przyj cie 0
≤ γ
1
≤ γ
2
< 1 gwarantuje jednoczesne spełnienie obu tych
warunków.
[
]
[
]
k
T
k
k
T
k
k
k
p
W
g
p
p
W
g
)
(
)
(
2
γ
η
≥
+
[
]
k
T
k
k
k
k
k
k
p
W
g
W
E
p
W
E
)
(
)
(
)
(
1
η
γ
η
≥
−
+
Sztuczne sieci neuronowe
22
Minimalizacja kierunkowa
• Metody bezgradientowe
– informacje o warto ciach funkcji celu
– wyznaczanie minimum poprzez kolejne podziały zało onego na wst pie
zakresu warto ci wektora W
• Metody gradientowe
– wykorzystuj zarówno warto funkcji jak te jej pochodn wzdłu
wektora kierunku p
k
.
– znaczne przyspieszenie wyznaczenia minimum na danym kierunku
informacja o kierunku spadku)
Sztuczne sieci neuronowe
23
Przykład metody bezgradientowej
• Metoda bazuje na aproksymacji funkcji celu na kierunku p
k
, a nast pnie
wyznacza minimum otrzymanej w ten sposób funkcji jednej zmiennej
η
• Wielomian aproksymuj cy:
P(
η)=a
2
η
2
+a
1
η +a
0
gdzie a
2
,a
1
,a
0
- współczynniki wielomianu okre lane w ka dym cyklu
optymalizacyjnym
• Wyznaczanie współczynników wielomianu
– wybór trzech dowolnych punktów W
1
, W
2
, W
3
le cych na kierunku p
k
, tzn.
W
1
=W+
η
1
p
k
;
W
2
=W+
η
2
p
k
;
W
3
=W+
η
3
p
k
;
(W - poprzednie rozwi zanie);
– E
1
=E(W
1
); E
2
=E(W
2
); E
3
=E(W
3
); wówczas
P(
η
1
)= E
1
; P(
η
2
)= E
2
; P(
η
3
)= E
3
;
– Rozwi zuj c układ równa otrzymujemy współczynniki wielomianu
• Porównuj c pochodn wielomianu do zera otrzymujemy
η
mi
n
=(-a
1
/2a
2
)
• Po okre leniu s sprawdzane warunki. Je li algorytm ma by kontynuowany to
wybiera si kolejne punkty le ce na kierunku p
k
w pobli u punktu W+
η
mi
n
p
k
.
Sztuczne sieci neuronowe
24
Inne metody doboru współczynnika uczenia
• Reguła delta-bar-delta
– jest metod adaptacyjn opracowan dla kwadratowej definicji funkcji celu
i metody najwi kszego spadku
– ka dej wadze W
ij
jest przyporz dkowany indywidualnie dobrany
współczynnik uczenia
– Wada: du a zło ono obliczeniowa
– Zaleta: przyspieszenie procesu uczenia i zwi kszenie prawdopodobie stwa
osi gni cia minimum globalnego
• Metoda gradientów sprz onych z regularyzacj
– odmiana zwykłej metody gradientów sprz onych ł cz c jednocze nie
wyznaczanie kierunku p oraz optymalnego kroku
Sztuczne sieci neuronowe
25
Algorytm Quickprop
• odmiana algorytmu gradientowego zawiera elementy metody
newtonowskiej i wiedzy heurystycznej
• zawiera elementy zabezpieczaj ce przez utkni ciem w płytkim
minimum lokalnym (ze wzgl du na nasycenie neuronu)
• Zmiana wagi w k-tym kroku
• Zalety: szybka zbie no dla wi kszo ci trudnych problemów
• kilkusetkrotne przyspieszenie procesu uczenia (w porównaniu z
algorytmem najwi kszego spadku)
• małe prawdopodobie stwo utkni cia w minimum lokalnym
)
1
(
)
(
))
(
(
)
(
−
∆
+
+
∂
∂
−
=
∆
k
W
k
W
W
k
W
E
k
W
ij
k
ij
ij
ij
k
ij
α
γ
η
Sztuczne sieci neuronowe
26
Algorytm RPROP
(ang. Resilent backPROPagation)
gdzie
– a=1.2; b=0.5
η
min
;
η
max
- minimalna i maksymalna warto współczynnika uczenia (10
-6
; 50)
Zalety
– przyspieszenie procesu uczenia w obszarach gdzie nachylenie funkcji celu
jest niewielkie
∂
∂
−
=
∆
ij
k
ij
ij
W
k
W
E
k
W
))
(
(
sgn
)
(
)
(
η
(
)
(
)
<
−
>
−
=
−
−
−
h
przypadkac
h
pozostalyc
w
k
S
k
S
dla
b
k
S
k
S
dla
a
k
ij
ij
ij
k
ij
ij
ij
k
ij
k
ij
)
1
(
min
)
1
(
max
)
1
(
)
(
0
)
1
(
)
(
,
max
0
)
1
(
)
(
,
min
η
η
η
η
η
η
ij
ij
W
k
W
E
k
S
∂
∂
=
))
(
(
)
(
Wyszukiwarka
Podobne podstrony:
Optymalizacja Cw 3 Zadanie programowania nieliniowego bez ograniczeń algorytmy optymalizacji lokaln
B8 Algorytmy optymalizacji w dyskretnych systemach produkcyjnych
Algorytm optymalny i algorytm RPT
PRACA PRZEJŚCIOWA OPTYMALIZACJA PROCESÓW ENERGETYCZNYCH POPRZEZ ZASOTOWANIE NOWOCZESNYCH ALGORYTMÓW
PracaMag optymalizacja algorytmów warstwy sterowania, komputery, sieci komputerowe
PRACA PRZEJŚCIOWA OPTYMALIZACJA PROCESÓW ENERGETYCZNYCH POPRZEZ ZASOTOWANIE NOWOCZESNYCH ALGORYTMÓW
Układy Napędowe oraz algorytmy sterowania w bioprotezach
5 Algorytmy
5 Algorytmy wyznaczania dyskretnej transformaty Fouriera (CPS)
Optymalizacja LP
Zasady ergonomii w optymalizacji czynności roboczych
Tętniak aorty brzusznej algorytm
Algorytmy rastrowe
Algorytmy genetyczne
Teorie algorytmow genetycznych prezentacja
Algorytmy tekstowe
więcej podobnych podstron