1
1. PODSTAWY PROJEKTOWANIA
UKŁADÓW CYFROWYCH
1.1. Wprowadzenie
Układy przełączające (logiczne) klasyfikuje się do układów sterowania cyfrowego. Układy te
przetwarzają sygnały dwuwartościowe w odróżnieniu od sygnałów ciągłych. Takie
dwuwartościowe sygnały nazywane są także sygnałami binarnymi lub zerojedynkowymi.
Działanie układów logicznych zwanych także automatami cyfrowymi, opisywane jest za
pomocą algebry Boole’a.
Układy logiczne dzielą się na kombinacyjne i sekwencyjne. W układach kombinacyjnych
wyjścia są określone jednoznacznie przez aktualne wejścia. W układach sekwencyjnych takie
same sygnały wejściowe mogą wywoływać inne stany wyjściowe. Tym samym aktualne
wyjścia, oprócz kombinacji wejść, są zależne także od poprzednich stanów wyjść. Ponieważ
poprzednie wyjścia są określone przez stany poprzednich wejść więc można powiedzieć, że
układy sekwencyjne są to układy zależne od aktualnych i poprzednich sygnałów wejściowych.
W układach sekwencyjnych występuje zatem, sekwencja zdarzeń (historia zdarzeń).
Uwzględnienie tej historii jest możliwe dzięki zastosowaniu w układzie elementów pamięci.
Realizacja układów sterowania logicznego wymaga zastosowania różnego rodzaju elementów
logicznych. Do grupy elementów logicznych, ze względu na kolejność ich zastosowania
(powstania), można zaliczyć:
Układy SSI (Small Scale Integration)
-
elementy stykowe - przekaźnikowe,
-
bramki logiczne,
Układy MSI (Medium Scale Integration)
-
multipleksery, demultipleksery i kodery,
Układy LSI (Large Scale Integration)
-
programowalne matryce logiczne PAL/GAL (Programmable Array Logic/ Generic Array
Logic),
-
programowalne sterowniki logiczne PLC (Programmable Logic Controller).
1.2. Analityczny zapis schematu układu przekaźnikowego
Wielkości wyjściowe (obwody wyjściowe) uzależnione są zwykle od kilku wielkości
wejściowych. Interesują nas dwa stany elementów wejściowych: załączania i wyłączania.
Tworzenie odpowiedniej funkcji celu sterowania zależy od zestyków, które w zależności od
swego stanu i sposobu połączeń tworzą bądź zwarcie, bądź przerwę.
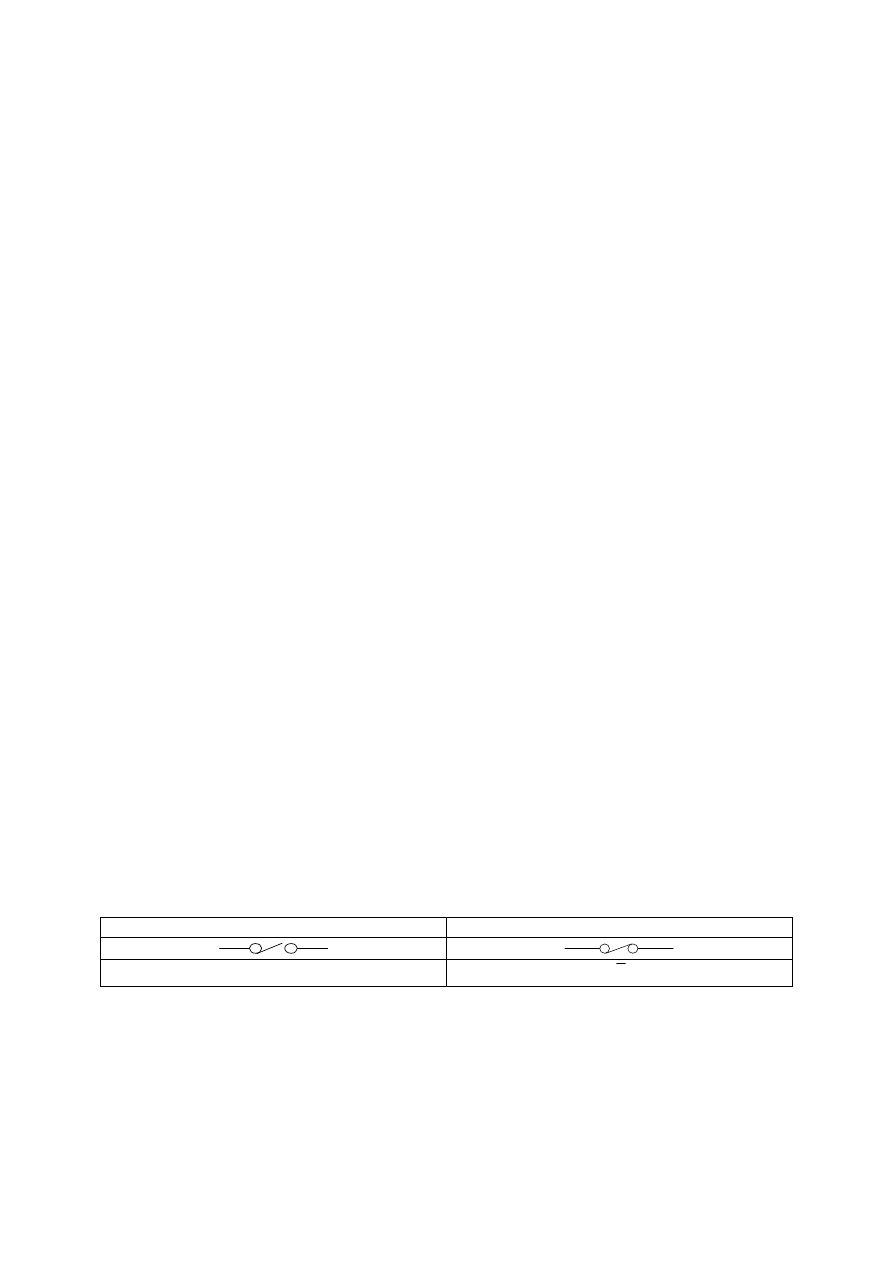
Tablica 1.1. Przedstawienie graficzne elementów stykowych (przekaźnikowych)
stan styków normalnie otwarty (zwierne)
stan styków normalnie zamknięty (rozwierne)
a
a
Dla analitycznego zapisu schematu układu przełączającego przyjmuje się zasadę, że styki
połączone szeregowo przedstawione są w postaci iloczynu literowych styków, zaś styki
połączone równolegle tworzą sumę tych oznaczeń.
Tak więc układ załączający cewkę przekaźnika F i złożony np. z szeregowo połączonych
zestyków zwiernego a i rozwiernego
b
−
można zapisać:
2
−
=
b
a
F
(1.1)
Takie potraktowanie zagadnienia i symbolika pozwalająca na uproszczony zapis, zapożyczone
są z logiki matematycznej. Prawa charakterystyczne dla algebry logiki nazywane są algebrą
Boole’a.
1.3. Podstawowe prawa algebry Boole’a
George Boole (1815-1864) matematyk angielski sprecyzował matematyczne reguły analizy
zdań logicznych. Podstawą w tym zakresie stanowi tzw. rachunek zdań oparty na koncepcji, że
zdania logiczne muszą być określone wyłącznie jako prawdziwe lub fałszywe. Określenie
prawda i fałsz stanowią, historycznie biorąc, pierwszy rodzaj klasyfikacji binarnej używany w
opisie elementów dwustanowych. Aparat matematyczny (algebra Boole’a) wykorzystuje logikę
dwustanową zerowo-jedynkową.
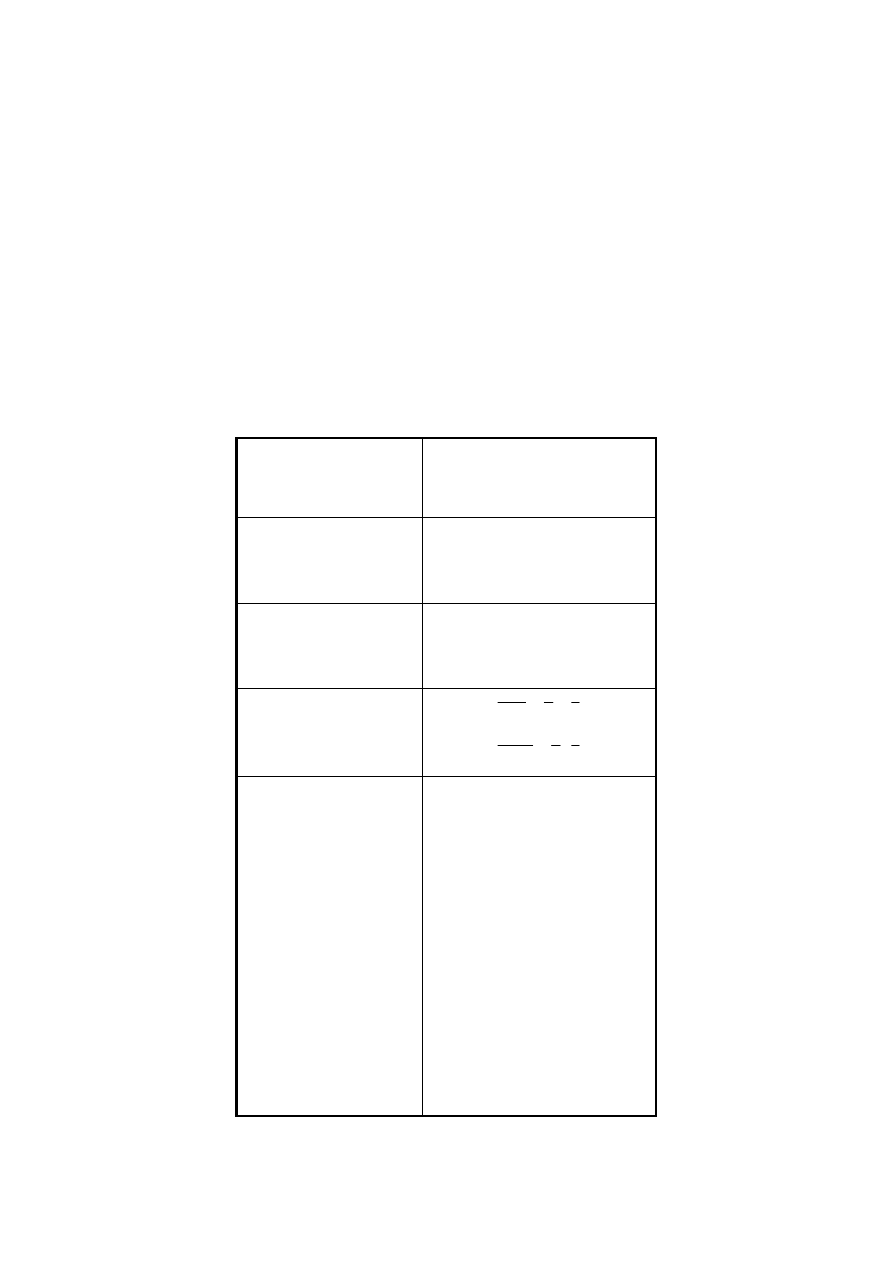
Tablica 1.2. Podstawowe prawa algebry Boole’a.
Prawa przemienności
a
b
b
a
⋅
=
⋅
a
b
b
a
+
=
+
Prawa łączności
c
b
a
c
b
a
⋅
⋅
=
⋅
⋅
)
(
)
(
c
b
a
c
b
a
+
+
=
+
+
)
(
)
(
Prawa rozdzielności
)
(
)
(
)
(
c
a
b
a
c
b
a
⋅
+
⋅
=
+
⋅
)
(
)
(
)
(
c
a
b
a
c
b
a
+
⋅
+
=
⋅
+
Prawa de Morgana
b
a
b
a
+
=
⋅
b
a
b
a
⋅
=
+
Prawa tożsamościowe
a
a
a
=
⋅
a
a
a
=
+
0
=
⋅
−
a
a
1
=
+
−
a
a
a
a
=
⋅
1
1
1
=
+
a
0
0
=
⋅
a
a
a
=
+
0
3
a
a =
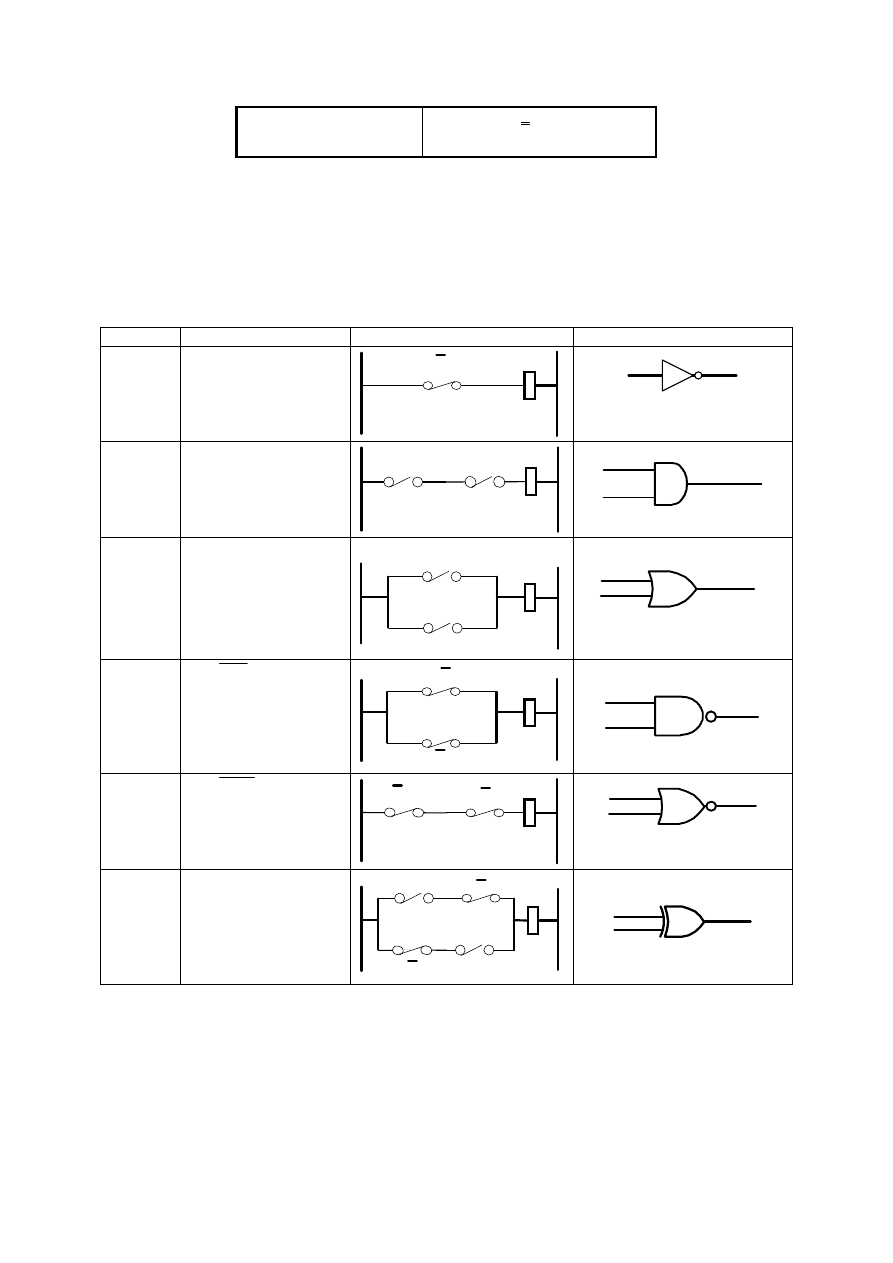
1.4. Podstawowe funkcje logiczne
Podstawowe funkcje logiczne, z których tworzy si
ę
układy kombinacyjne, przedstawiono w
tablicy 1.3. W tablicy tej podano równowa
ż
ne schematy układów bramkowych i
przeka
ź
nikowych
Tablica 1.3. Podstawowe schematy przekaźnikowe i ich odpowiedniki bramkowe
Opis
Wzór Boole’a
Schemat przekaźnikowy
Schemat bramkowy
NOT
−
=
a
F
F
a
a
F
AND
b
a
F
⋅
=
F
b
a
a
b
F
OR
b
a
F
+
=
F
b
a
a
b
F
NAND
b
a
F
⋅
=
F
a
b
a
b
F
NOR
b
a
F
+
=
F
a
b
a
b
F
EXOR
b
a
F
⊕
=
=
−
−
+
b
a
b
a
F
b
a
a
b
a
b
F
Wyszukiwarka
Podobne podstrony:
Podstawy Automatyki Lab 10 CW1 Układy przełączające oparte na elementach stykowych
Podstawy Automatyki Lab 2010 CW1 Układy przełączając…
Podstawy-Automatyki-Lab-2010-CW1-Układy-przełączając…
Podstawy Automatyki Lab 2014 CW1 Układy przełączające oparte na elementach stykowych
Podstawy Automatyki Lab 10 CW3 Układy sekwencyjne elektroniczne
Podstawy Automatyki Lab - 2010 - CW2, Układy kombinacyjne
Podstawy Automatyki Lab 2010 CW2 Układy kombinacyjne
Podstawy Automatyki Lab 10 CW2 Układy kombinacyjne oparte na elektronicznych układach TTL
PODSTAWY AUTOMATYKI lab 1
Podstawy Automatyki Lab 2014 CW3 Badania regulatora dwupołożeniowego
Podstawy Automatyki Lab - 2010 - CW6, Badanie regulatora
Podstawy Automatyki Lab 10 CW6 ?danie regulatora PID
więcej podobnych podstron