ZAGADNIENIE TRASOWANIA POJAZDÓW Z OGRANICZENIAMI
CZASOWYMI ORAZ OGRANICZONĄ LICZBĄ POJAZDÓW.
METODA WYZNACZANIA GÓRNEGO OGRANICZENIA DLA
CAŁKOWITEJ LICZBY ODBIORCÓW
Tomasz AMBROZIAK, Renata PIĘTKA
Politechnika Warszawska
Wydział Transportu
Zakład Logistyki i Systemów Transportowych
ul. Koszykowa 75, 00-662 Warszawa
e–mail: pietkar@gazeta.pl
STRESZCZENIE
W artykule przedstawiono wprowadzenie do problemu trasowania pojazdów z ograniczeniami
czasowymi oraz ograniczoną liczbą pojazdów. Przedstawiono również metodę wyznaczania górnego
ograniczenia całkowitej liczby odbiorców możliwych do obsłużenia daną ograniczoną liczbą pojazdów.
1. WSTĘP
Wiele praktycznych problemów logistyki transportu i dystrybucji może być
sformułowanych jako zagadnienie trasowania pojazdów z ograniczeniami czasowymi.
Rozwiązaniem tego typu problemów jest znalezienie takiej organizacja przewozów, której
celem jest uzyskanie planu tras o minimalnym koszcie obsługującego zbiór odbiorców
ze znanymi popytami. Zakładamy, że każdy odbiorca jest przyporządkowywany do dokładnie
jednej trasy pojazdu, a całkowity popyt każdej z tras nie może przekraczać pojemności
pojazdu.
Większość proponowanych metod znalezienia ww. planu tras zakłada, że liczba
dostępnych pojazdów jest nieograniczona, a celem jest uzyskanie rozwiązania,
które minimalizuje ich liczbą i/lub całkowity koszt przejazdu. Jednakże w rzeczywistości
operatorzy transportowi dysponują ograniczonymi zasobami pojazdów.
POLITECHNIKA WARSZAWSKA
Wydział Transportu
Polska Akademia Nauk
Komitet Transportu
2. CHARAKTERYSTYKA PROBLEMU
2.1.
CHARAKTERYSTYKA
PROBLEMU
TRASOWANIA
POJAZDÓW
Z OGRANICZENIAMI CZASOWYMI ORAZ OGRANICZONA ILOŚCIĄ
POJAZDÓW
W artykule omówiony zostanie problem trasowania pojazdów z ograniczeniami
czasowymi oraz ograniczoną liczbą dostępnych pojazdów polegający na rozwózce lub
zwózce towarów bądź osób, w zależności od rodzaju zagadnienia(np. przewozy z i do
szkoły). Zakładamy, że równoczesna zwózka i rozwózka nie jest dopuszczalna. Przykładowy
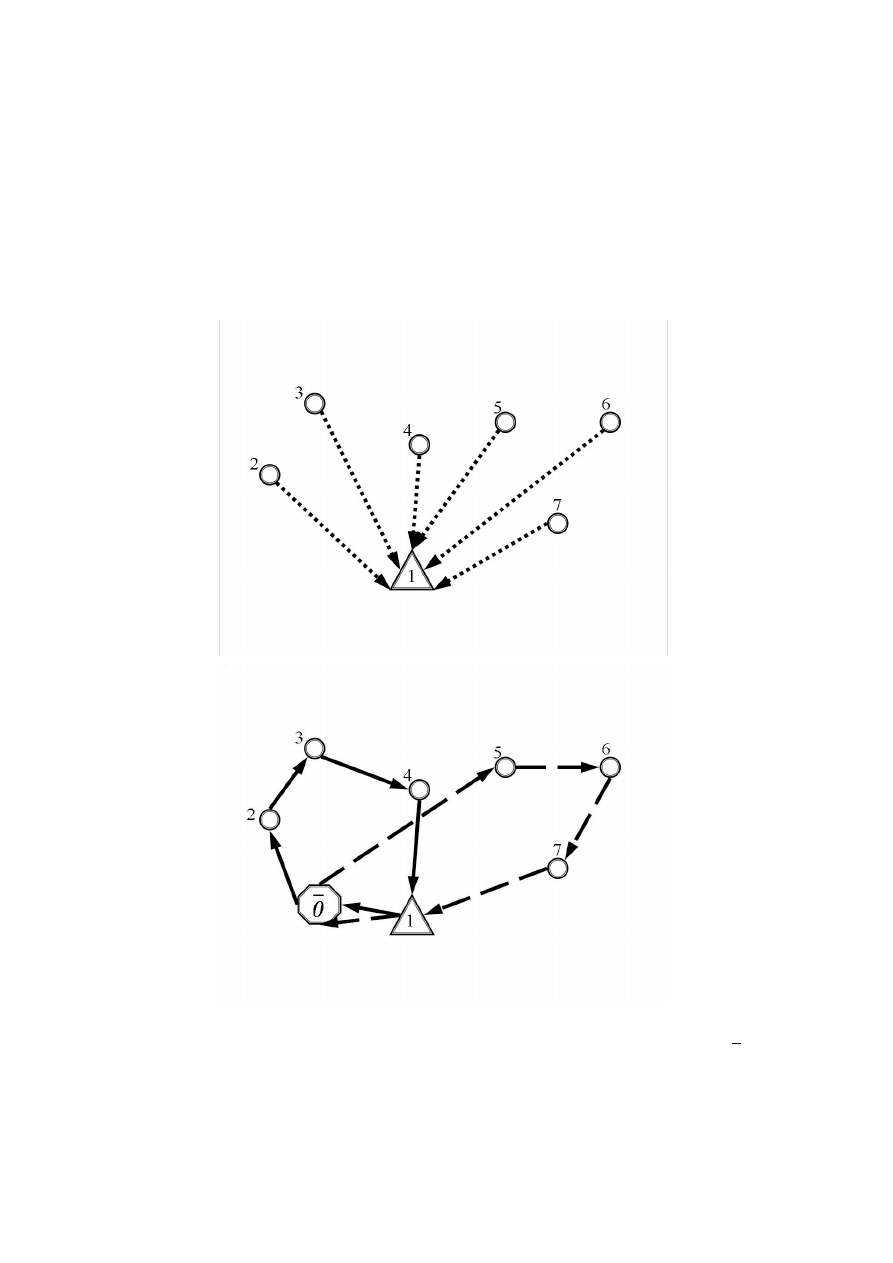
schemat problemu zwózki oraz przykład rozwiązania przedstawione został na rys. 1.
Rys. 1. Przykładowy problem zwózki z 7 odbiorcami wraz przykładowym rozwiązaniem. Wierzchołek
0
- baza,
wierzchołek 1 – wierzchołek końcowy.
Wyżej przedstawiony problem można sformułować następująco. Niech n będzie liczbą
odbiorców zgłaszających zapotrzebowanie na przewóz. Tworzymy zbiór N ={2,…, n+1}
numerów wierzchołków oznaczających poszczególnych odbiorców. Wierzchołek 1
reprezentować będzie punkt początkowy(w przypadku rozwózki) bądź punkt końcowy (w
przypadku zwózki) zlecenia, zaś 0 reprezentować będzie bazę pojazdów.
Dla każdego wierzchołka i∈ N mamy określony czas obsługi o
i
, który przykładowo
określać może czas potrzebny do wsiadania bądź wysiadania z pojazdu osób, zależny
chociażby w przypadku przewozu osób niepełnosprawnych od stopnia niepełnosprawności
pasażera.
Wielkość q
i
określa popyt każdego z odbiorców(przykładowo liczbę osób jaką należy
zabrać z i-tego wierzchołka). Zakładamy, że podział wielkości q
i
jest zabroniony. W związku
z tym popyt każdego odbiorcy musi być mniejszy niż największa dostępna pojemności
pojazdu:
max{ } max{ }
a
i
a
i
!
q
q
(2.1)
gdzie a określa typ dostępnego pojazdu.
Zakładamy dodatkowo, że łączny popyt odbiorców jest znacznie większy
od największej dostępnej pojemność pojazdu:
1
2
max{ }
a
i
a
i
+
=
>>
!
n
q
Q
(2.2)
Zakładamy, że przewozy odbywać się będą uwzględniając w każdym i-tym zleceniu
następujące kryteria jakości:
-
dla każdego odbiorcy i∈ N obsługa w wierzchołku 1 nie może w przypadku rozwózki
rozpocząć się wcześniej niż wartość
ro
T
1
dla wierzchołka 1, zaś w przypadku zwózki
zakończyć później niż
pr
T
1
;
-
rzeczywisty czas jazdy każdego klienta nie może przekraczać maksymalnej wartości
max
,
1 i
t
dla rozwózki, a
max
1
,
i
t
dla zwózki, będącej pewną funkcją bezpośredniego czasu
jazdy t
1,i
(dla rozwózki) lub t
i,1
(dla zwózki) między wierzchołkiem 1 a wierzchołkiem
i∈ N (np. podwojonej wartości bezpośredniego czasu jazdy między tymi
wierzchołkami);
-
różnica („czas odchylenia”) pomiędzy rzeczywistym momentem odbioru(dowozu) a
pożądanym momentem odbioru(dowozu) nie może przekraczać ustalonej wartości
maksymalnej
max
od
t
.
Na podstawie podanych powyżej kryteriów jakości dla każdego i∈ N wyznaczamy,
okna czasowe [a
i
, b
i
], określające przedziały, w zakresie których należy rozpocząć/zakończyć
obsługę w i-tym wierzchołku.
Dla problemu rozwózki okna te wyznaczamy z następujących zależności:
- najwcześniejszy możliwy moment rozpoczęcia obsługi w wierzchołku 1
ro
T
a
1
1
=
(2.3)
- najpóźniejszy dopuszczalny moment rozpoczęcia obsługi w wierzchołku 1
max
1
1
od
t
a
b
+
=
(2.4)
- najwcześniejszy możliwy moment rozpoczęcia obsługi w wierzchołku i
i
i
t
a
a
,
1
1
+
=
(2.5)
- najpóźniejszy dopuszczalny moment rozpoczęcia obsługi w wierzchołku i
max
,
1
1
i
i
t
b
b
+
=
(2.6)
natomiast dla problemów zwózki zależności te są następujące:
- najpóźniejszy możliwy moment rozpoczęcia obsługi w wierzchołku 1
pr
T
b
1
1
=
(2.7)
- najwcześniejszy dopuszczalny moment rozpoczęcia obsługi w wierzchołku 1
max
1
1
od
t
b
a
!
=
(2.8)
- najwcześniejszy możliwy moment rozpoczęcia obsługi w wierzchołku i
1
,
1
i
i
t
a
a
!
=
(2.9)
- najpóźniejszy dopuszczalny moment rozpoczęcia obsługi w wierzchołku i
max
1
,
1
i
i
t
b
b
!
=
(2.10)
Na rys. 2. powyższe zależności zostały przedstawione graficznie dla obu przypadków.
Określony jest również dla każdej pary wierzchołków i,j∈ N ∪{ 0 ,1} ∧ (i≠j) czas
podróży t
i,j
oraz odległość d
i,j
między wierzchołkami i oraz j .
Zakładamy, że w bazie 0 z oknem czasowym
0
0
[ , ]
a b
mamy do dyspozycji A typów
pojazdów. Zbiór A={1,…, a,…, A} oznacza zbiór numerów typów pojazdów. Każdy pojazd
typu a charakteryzuje się pojemnością Q
a
∈
/{0}, oraz ustalonym kosztem eksploatacyjnym
a
c
określonym na jednostkę odległości. Niech zbiór P(a)={1
a
,…,L(a)
a
} określa zbiór
numerów pojazdów typu a, przy czym L(a) określa liczbę pojazdów typu a. Niech
P=
a !
U
A
P(a) będzie zbiorem numerów wszystkich dostępnych pojazdów.
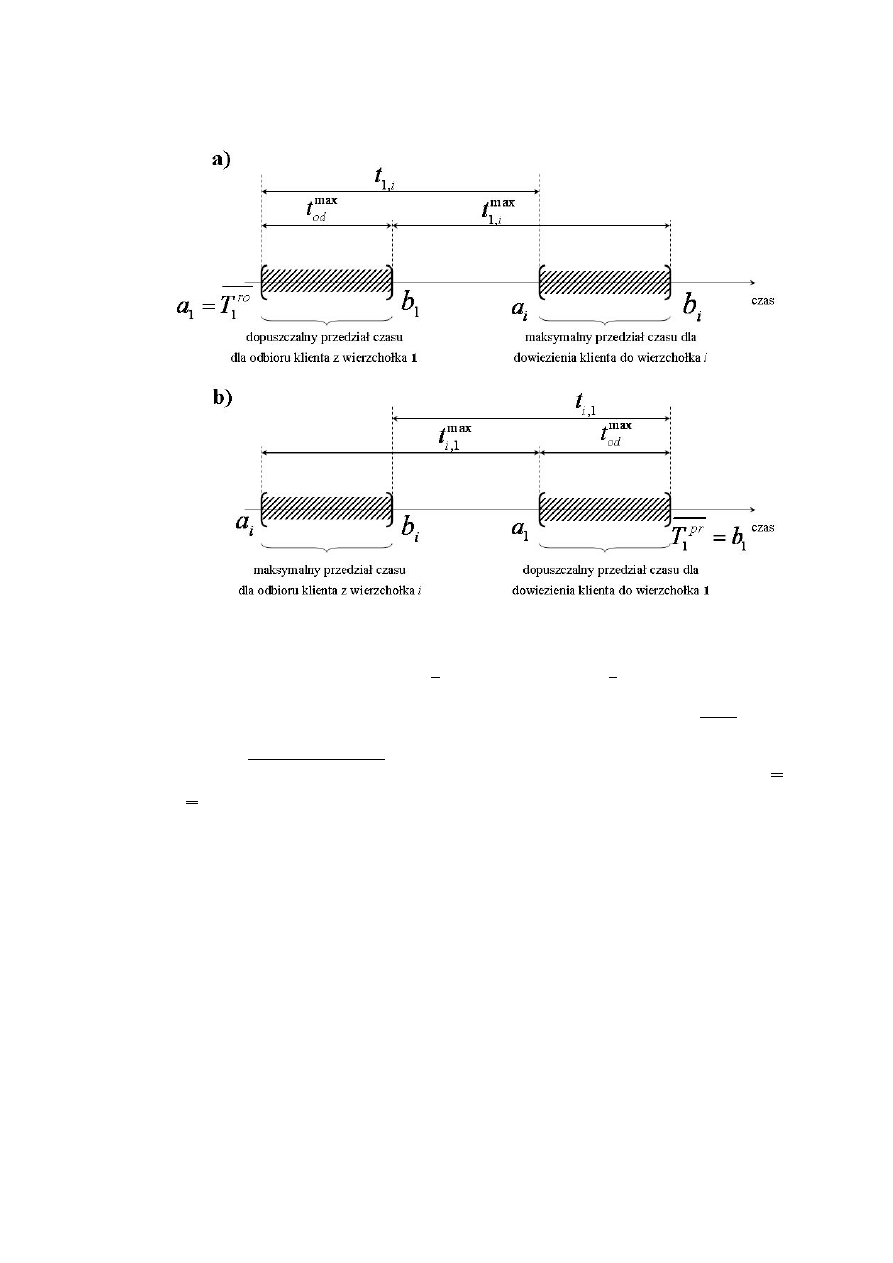
Rys. 2. Schemat okien czasowych: a) przypadek rozwózki; b) przypadek zwózki.
Ciąg wierzchołków T = 〈 1, i
1
,…, i
m
, 0 〉(rozwózka) lub T = 〈0 , i
1
,…, i
m
, 1 〉(zwózka)
gdzie i
1
,…, i
m
jest m-elementowym ciągiem liczb ze zbioru N nazywać będziemy trasą. Zbiór
tras mających tę własność, że każdy wierzchołek występuje dokładnie raz w jednej z tras
nazywać będziemy planem przewozów.
Zadaniem jest uzyskanie takiego planu przewozów składającego się maksymalnie z
P
tras(gdzie
P
moc zbioru P równa liczbie dostępnych pojazdów), spełniającego następujące
ograniczenia:
-
każda trasa rozpoczyna się/kończy w bazie i kończyć/rozpoczynać w wierzchołku 1;
-
każdy wierzchołek(odbiorca) obsługiwany jest dokładnie raz;
-
całkowity popyt wszystkich odbiorców obsługiwanych na trasie nie przekracza
pojemności pojazdu przypisanego do tej trasy;
-
obsługa w każdym punkcie musi rozpocząć się/zakończyć w przedziale czasu
określonym oknem czasowym;
-
liczba użytych do przewozów pojazdów nie może przekraczać dostępnej ilości.
-
czas pracy pojazdu nie może przekraczać danej wartości maksymalnej(np.
dopuszczalny czas pracy kierowców);
gdzie funkcja celu:
-
maksymalizuje całkowitą liczbę obsługiwanych odbiorców;
-
minimalizuje całkowitą liczbę odbiorców obsługiwanych później (jeśli dozwolone);
-
minimalizuje całkowity czas trwania zwłoki (jeśli dozwolone);
-
minimalizuje całkowitą liczbę użytych pojazdów;
-
minimalizuje całkowitą odległości przejazdu.
Jednym z możliwym sposobów uchwycenia tak wielokryterialnego celu jest
zdefiniowanie funkcji kosztów będącej sumą kosztów odpowiadających poszczególnym
kryteriom z przypisaniem im odpowiednich wag. Jednakże, określenie poprawnych wag może
stać się trudne (lub wręcz niemożliwy), a wynikowa funkcja stanie się bezsensowna
do zinterpretowania.
Innym z podejść do problemu jest zdefiniowanie hierarchicznej struktury kosztów
jak zaproponowano w [1]. Dla przykładu, obsłużenie większej liczby odbiorców jest zawsze
lepsze niezależnie od liczby użytych pojazdów. Zaproponowana hierarchiczna struktura
kosztów odpowiadała w malejący kolejność pierwszeństwa przedstawionej powyżej liście
celów. Dla dokładniejszego opisu hierarchicznej struktury kosztów odsyłamy do publikacji
Lau H.C., Sim M., Teo K.M. [1].
2.2. METODA WYZNACZANIA GÓRNEGO OGRANICZENIA DLA CAŁKOWITEJ
LICZBY ODBIORCÓW
Do wyznaczania górnego ograniczenia dla całkowitej liczby odbiorców, którzy mogą być
obsłużeni ograniczoną liczbą pojazdów w problemach trasowania pojazdów z ograniczeniami
czasowymi Lau H.C., Sim M., Teo K.M. [1] zaproponowali sformułowanie w postaci zadania
programowania całkowitoliczbowego. Sformułowanie takie dzięki swojej prostocie jest
w stanie zapisać problemy dużych rozmiarów, nie jest jednak na tyle uproszone aby jego
wynik odbiegał znacznie od poszukiwanego rozwiązania optymalnego.
Przykładowo dla problemu rozwózki w zastosowanym sformułowaniu będzie brało się
pod uwagę ograniczenia pojemności pojazdów, jaki i ograniczenia czasu narzucone przez
najpóźniejsze momenty powrotu każdego pojazdu do bazy. W tym przypadku górne
ograniczenie liczbą odbiorców możliwych do obsłużenia jest wynikiem rozwiązywania
następującego sformułowania programowania całkowitoliczbowego.
Niech P =
a !
U
A
P(a) będzie zbiorem numerów wszystkich dostępnych pojazdów, zaś
N
c
=N∪{
0
,1} będzie zbiorem numerów wierzchołków reprezentujących odbiorców
wyłączając wierzchołek bazy oraz wierzchołek początkowy. Zdefiniujmy wielkość
,
min
i
j i j
r
t
=
dla i,j∈ N
c
∧ (i≠j), określającą czas przejazdu z wierzchołka i do najbliższego
sąsiada i jest dolnym ograniczeniem czasu przejazdu z wierzchołka i do każdego innego
wierzchołka.
Niech
,0
i
i
i
i
w
b o
t
=
+
+
dla i∈ N
c
oznacza moment powrotu do bazy po obsłużeniu odbiorcy
w wierzchołku i jako ostatniego odbiorcy, przy czym obsługa odbiorcy i rozpoczęło się
w najpóźniejszym momencie rozpoczęcia obsługi. Bez utraty uogólnienia załóżmy,
że wszystkie wartości w
i
nie przekraczają okna czasowego dla bazy.
Niech G={g
1
, g
2
,…,
P
g
} będzie listą
P
niepowtarzalnych odbiorców, dla których w
i
≥w
j
dla wszystkich i∈ G ∧ j∉ G. Zakładamy, że wszystkie pojazdy są identyczne, a
P
elementów
zbioru G reprezentują najpóźniejsze możliwe momenty powrotu do bazy dla każdego z
P
pojazdów, dla wykonalności rozwiązania.
Zmienną decyzyjną oznaczamy przez
P
!
"
p
,
1,
0,
i p
je¿eli wierzcholek
jest obslugiwany przez pojazd ,
x
w przeciwnym razie
!
"
= #
$
i N
p
(2.11)

Znaleźć maksimum funkcji
ƒ(x) =
i,p
p
i
x
!
!
" "
c
P
N
→ max
(2.12)
spełniającej ograniczenia:
,
1
i p
i
p
x
!
!
"
#
$
c
N
P
(2.12)
,
i p
i
p
i
x
q
Q
!
!
"
#
$
%
c
P
N
(2.13)
,
0
(
)
i p
i
i
g
p
i
x
o
r
r
w
!
!
"
#
+
+
$
%
c
p
P
N
(2.14)
Ograniczenia (2.12) zapewnia, że wszyscy odbiorcy muszą być przyporządkowywani
co najwyżej do jednego pojazdu. Ograniczenia (2.13) zapewnia, że pojemność każdego
z pojazdów nie jest przekroczona. Ograniczenia (2.14) narzuca, że dla każdego pojazdu,
najwcześniejszy możliwy moment powrotu do bazy nie może przekraczać najpóźniejszego
możliwego momentu powrotu (narzuconego przez G).
Zauważmy, że w tym sformułowaniu, zignorowane zostało całkowicie rozpatrywanie
ograniczeń okien czasowych i rzeczywistego czasu przejazdu pomiędzy dwoma
wierzchołkami. Będzie ono więc mniej efektywne dla problemów z wąskimi oknami
czasowymi.
3. WNIOSKI
Występowanie w problemach trasowania pojazdów ograniczeń na czas pracy
pojazdów, godzin otwarcia bazy i pożądanych czasów obsługi odbiorców znacząco
komplikuje problem. W rzeczywistych problemach mamy jednak do czynienia jeszcze
dodatkowo z ograniczoną liczbą pojazdów, będących w dyspozycji przewoźników.
Konsekwencją tak wielu ograniczeń może być trudność w skonstruowaniu planu
dopuszczalnego, zwłaszcza, kiedy w problemie ograniczenia czasu są restrykcyjne.
Wyznaczenie górnego ograniczenia dla całkowitej liczby odbiorców, którzy mogą
być
obsłużeni
ograniczoną
liczbą
pojazdów
w
problemach
trasowania
z ograniczeniami czasowymi pozwala na wstępne określenie możliwości realizacji
założonych przez przewoźnika zadań.
LITERATURA
[1] Lau H.C., Sim M., Teo K.M.: Vehicle routing problem with time windows and limited number of
vehicles,
European Journal of Operational Research 148 (2003) 559–569.
[2] Savelsbergh M.W.P., Sol M.: The general pickup and delivery problem. Transportation Science
29 (1995).
[3] Solomon M. M., Desrosiers J.: Time window constrained routing and scheduling problems.
Transportation Science 22 (1988)
[4] Piasecki S. Optymalizacja systemów przewozowych. Wydawnictwa Komunikacji i Łączności.
Warszawa 1973.
[5] Ambroziak T., Piętka R. Metoda wyznaczania suboptymalnej organizacji przewozów
terminowych. Materiały Konferencyjne VIII. Konferencji Logistyki Stosowanej "TOTAL
LOGISTIC MANAGEMENT" Zakopane 2004.
[6] Piętka R. Zagadnienie przewozów terminowych. Sformułowanie zadania optymalizacyjnego,
metoda rozwiązania. Zeszyty Naukowe Politechniki Śląskiej Nr 1621 Transport 52 (2004).
VEHICLE ROUTING PROBLEM WITH TIME WINDOWS
AND A LIMITED NUMBER OF VEHICLES.
METOD OF DETERMINING AN UPPER BOUND FOR THE TOTAL NUMBER OF CUSTOMERS.
ABSTRACT
This paper introduces a variant of the vehicle routing problem with time windows where a limited number of vehicles
is given. There is also presented the method of
determining an upper bound for the total number of customers that
can be served by a given fixed number of vehicles.
Wyszukiwarka
Podobne podstrony:
poster 040
P18 040
pf 07s038 040
PaVeiTekstB 040
p37 040
C 040
p03 040
VA 040 Drills, STW
mat bud 040 (Kopiowanie) (Kopiowanie)
2010 03, str 040 044
040
04 2005 040 042
P26 040
p08 040
p35 040
040
Operacja 040, /zakład/
p14 040
P24 040
więcej podobnych podstron