DATA: Ćwiczenie
nr 7
PROTOTYPOWANIE UKŁADÓW ELEKTRONICZNYCH
LonWorks – Realizacja regulatora dla silnika prądu stałego
Maciej Rosół, Katedra Automatyki AGH, e-mail: mr@ia.agh.edu.pl
1
Cel ćwiczenia
Celem ćwiczenia jest realizacja wybranego algorytmu sterowania silnikiem prądu stałego w
rozproszonym systemie sterowania utworzonym z wykorzystaniem sieci LonWorks.
2
Przebieg ćwiczenia
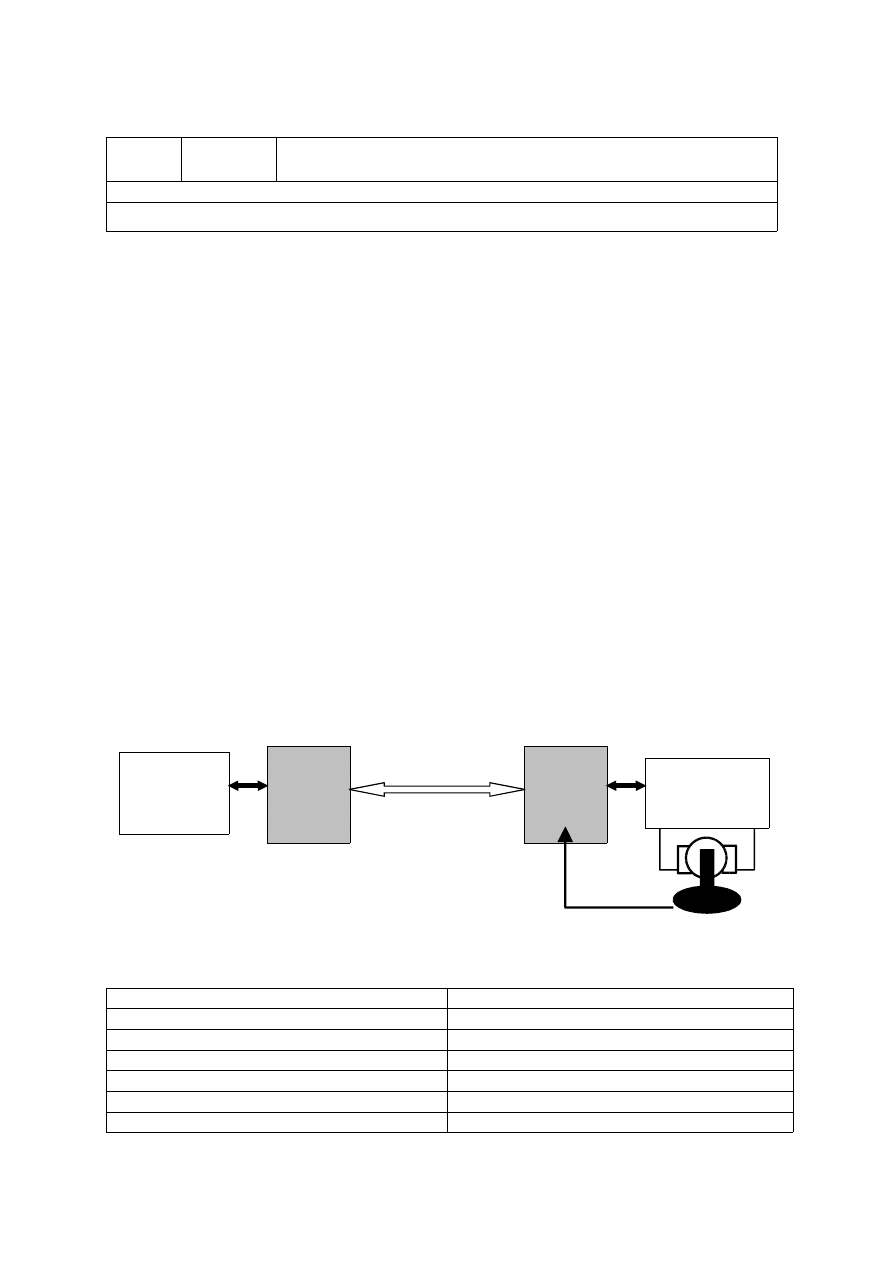
W ramach zajęć należy zrealizować strukturę sterowania przedstawioną na rys. 1. Obiektem
sterowania jest silnik prądu stałego podłączony do węzła 2 sieci LonWorks poprzez element
mocy. Element ten sterowany jest sygnałem PWM. Pomiar położenia wału silnika
dokonywany jest z wykorzystaniem enkodera inkrementalnego, którego sygnały pomiarowe
podłączone są do węzła 2. Do węzła 1 podłączony jest moduł GIZMO-3 zawierający m.in.
potencjometry, przyciski i zespół wyświetlaczy 7-segmentowych.
Należy zrealizować dwa zadania spełniających następujące założenia:
Zadanie 1. Śledzenie
Kąt obrotu potencjometru enkoderowego z modułu Gizmo-3 musi być zgodny z kątem
obrotu wału silnika DC.
Aktualna wartość położenia kątowego wału silnika ma być wyświetlana na
wyświetlaczach modułu Gizmo-3.
Zadanie 2. Należy zrealizować regulator stabilizujący prędkość obrotową lub położenie wału
silnika DC na ustalonej wartości. Wartość zadaną należy ustawiać z węzła 1 i wyświetlać
aktualne położenie lub prędkość wału silnika na wskaźnikach LCD modułu GIZMO-3.
Przyporządkowanie wyprowadzeń enkodera inkrementalnego i elementu mocy do
wyprowadzeń Neuron Chip’a.
3
Enkoder inkrementalny
4
Neuron Chip
Fala A
I0_4
Fala B
IO_5
5
Końcówka mocy
Neuron Chip
Sterowanie PWM
IO_0
Kierunek DIR
IO_1
Stop BRAKE
IO_2
Węzeł
1
Węzeł
2
BackPlane 1.25Mbit/s
GIZMO-3
Końcówka
mocy PWM
Enkoder
Pomiar położenia
wału silnika DC

UWAGI !!!
1. Realizacja obydwóch zadań wymaga przeliczenia ilości impulsów z enkoderów
inkrementalnych na jednostki kąta obrotu wału silnika. Dla potencjometru enkoderowego
znajdującego się na Gizmo-3 ilość impulsów na obrót wynosi 200, natomiast dla enkodera
zamontowanego na wale silnika – 1000.
2. W pierwszym etapie zadania 2 algorytm regulatora należy uruchomić na węźle 2. Węzeł 1
służy jako zadajnik i monitor zmiennych procesowych. Należy zastanowić się nad ilością i
typem zmiennych sieciowych oraz rodzajem wykorzystanych obiektów wejścia/wyjścia.
3. W drugim etapie zadania 2 algorytm regulatora należy uruchomić na węźle 1 tworząc
sprzężenie zwrotne poprzez sieć LonWorks. Należy uwzględnić zmianę i ilość zmiennych
sieciowych.
Wyszukiwarka
Podobne podstrony:
04 08 Lowiectwo cw7
POK cw7
cw7 (zginanie)
cw7 sprawozdanie
cw7, NAUKA, Politechnika Bialostocka - budownictwo, Semestr III od Karola, Technologia Betonu, beton
cw7 pk
sprawko ćw7
cw7
Lista cw7
cw7 5
Ćw7 wprowadzenie
cw7 BCD 2 7SEG
cw7 gi dzienne matoprwynbad
CW7 (5)
motor, Prawo, prawo karne
cw7 (3)
więcej podobnych podstron