200 PRZEGL!D ELEKTROTECHNICZNY (Electrical Review), ISSN 0033-2097, R. 86 NR 10/2010
Lech GRODZKI
Bialystok Technical University - Faculty of Electrical Engineering
Constant-current driving of the RGB LED
Abstract. LED RGB driving circuit should allow to stabilise the chosen colour of light according to the changing working conditions. Usually it is done
by the PWM control of the monochrome diode components. Some new integrated circuits widen the methods of LED control. Those ICs, working
under processor control, realise the constant-current supplying of LED diodes. The paper contains the description of main properties of such
integrated circuits and some results of realised research works on their application features.
Streszczenie. Uk!ady steruj"ce diodami LED RGB powinny umo#liwia$ stabilizowanie barwy emitowanego %wiat!a przy zmieniaj"cych si&
warunkach zewn&trznych. Zwykle wykorzystuje si& do tego sygna!y PWM. Nowoczesne uk!ady scalone umo#liwiaj" zastosowanie tak#e sterowania
sta!opr"dowego. Artyku! zawiera prezentacj& wybranych uk!adów tego typu, ich cech u#ytkowych i w!a%ciwo%ci aplikacyjnych.
Ci!g"o-pr!dowe sterowanie diod! LED RGB
Keywords: constant-current LED RGB driving, LED group working, microcontrollers
S!owa kluczowe: sta!opr"dowe sterowanie diod LED RGB, praca grupowa diod LED, mikrokontrolery
LED RGB driving
The main aims of LED RGB driving circuit are the
controlling the value of luminance flux and its colour. They
are two basic features of LED RGB diode, as a light source
illuminating architectural elements, art objects, etc. To
achieve
the
changes
of
these
parameters,
the
monochromatic components of RGB diode should be
controlled. The main electrical factors deciding about the
work of RGB diode are forward currents flowing by
component diodes. By controlling of these currents we can:
!
change the ratios between monochromatic luminance
fluxes !
R
, !
G
, !
B
to change the colour of resultant flux;
!
change total luminous flux by simultaneous changes
forward currents I
FR
, I
FG
and I
FB
in component diodes;
!
correct the influences on brightness and luminance
colour such environment factors as ambient temperature
or ageing the LED diode as a semiconductor devices.
Very popular method of LED luminance control is
applying the pulse width modulation. It is based on human
eyesight sense features: integrating light pulses and limited
fast event notification. By appropriate selecting the duty
cycle coefficients it is possible to control total luminance flux
as the sum of monochrome
component fluxes:
(1)
B
G
R
"
"
"
"
#
#
$
The same principle is used to control the LED RGB colour -
the changes of ratios between component luminance fluxes
!
R
, !
G
, !
B
result in the colour changes.
PWM controlled LED RGB drivers can be built using
analog circuits [1], microcontrollers [2] and even FPGA
devices [3]. Unquestionable disadvantage of described
above method is the necessity of simultaneous, multi-
channel generating rectangle waveforms with suitable high
frequency and adjustable duty cycle coefficients. Therefore,
the appearance of new solutions in driving LED devices is
worthy of notice.
Constant-current IC drivers - general characteristic
Texas Instruments offers a several ICs, dedicated to
constant-current driving of 16 LED diodes, with separate
forward current correction. There are the chips: TLC5922,
TLC5923 and TLC5924. They have some common features
[4, 5, 6], like:
!
16 output channels, each with controlled current source
with the current range 0-80 mA and accuracy ±1%;
!
7-bit current correction coefficient, separately for each
channel;
!
individual switching of output channels;
!
IC supply voltage range: 3,0-5,5 V;
!
LED device supply voltage up to 17 V, what allows to
control LED connected in series;
!
serial synchronous SPI interface, with speed up to
30 MHz, allowing supervising controller to control the
work of IC driver;
!
input of common blanking all the output channels;
!
the possibility of cascading IC devices on SPI bus.
Except the common features, presented ICs have some
differences each other, as it is shown in table 1.
Table 1. Selected feature differences of TLC5922/23/24
Feature
TLC5922 TLC5923 TLC5924
operation temperature range -20÷85°C -40÷85°C -40÷85°C
LED open detection and
indication
-
+
+
over-temperature indication
-
+
+
maximum LED supply
voltage U
LEDMAX
17 V
17 V
16 V
pre-charge FET circuit
-
-
+
Autonomous work of IC drivers
Presented IC drivers are able to work autonomous,
without supervising microcontroller, but in that case they
would drive the LEDs with a stable forward current, the
same for all output channels. Then, the only method of
changing the forward currents is to change external resistor
R
IREF
. That discrete element is placed between the power
ground and built-in band gap with a typical value of 1,24 V.
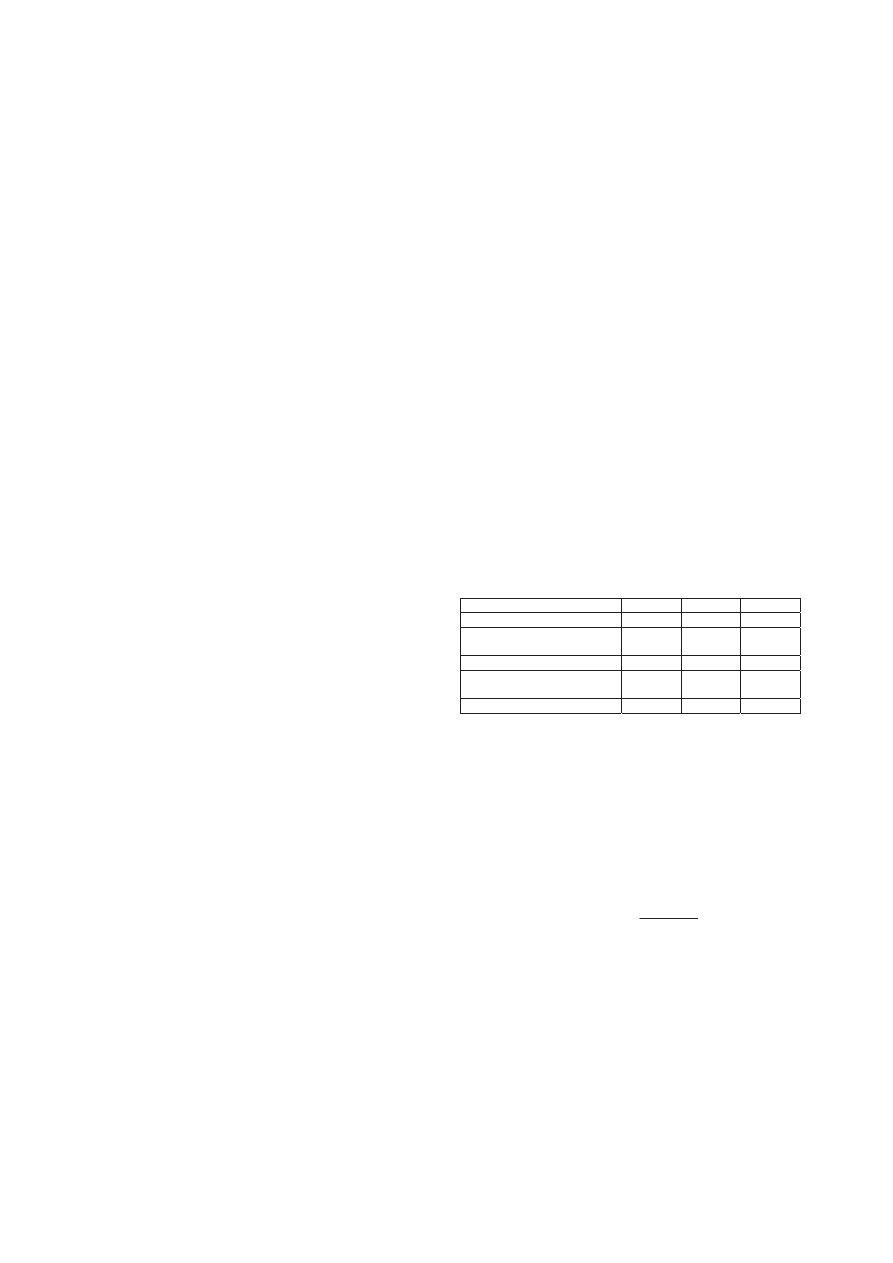
The maximum output current per channel can be calculated
by formula 2.
(2)
IREF
OUTMAX
R
V
,
I
40
24
1
%
$
The value of R
IREF
should not be smaller than 600 #. The
above relation is illustrated by figure 1.
The second way of controlling the LED devices,
connected to autonomous working IC driver, is the usage of
input terminal BLANK, which high logic level switches off
simultaneously all output channels.
In addition, TLC5923/24 devices have output signal
XERR, informing about detection of their malfunction, like
open LED circuit or over-temperature condition of IC.
TLC5924 chip has also built-in pre-charge FET circuit,
that enables an improvement in image quality of the
dynamic-drive LED display. That circuit uses LED supply
PRZEGL!D ELEKTROTECHNICZNY (Electrical Review), ISSN 0033-2097, R. 86 NR 10/2010 201
voltage U
LED
provided to selected terminal of driver
package. If the current-carrying capacity of single output
channel, equal 80 mA, is insufficient, there is a possibility of
parallel connecting several
outputs. That solution is
recommended by manufacturer in one of the application
notes [7]. In that case the resultant maximum current of
paralleled outputs is calculated by formula:
(3)
OUTMAX
OUTN
I
N
I
%
$
500
1000
1500
2000
2500
3000
R
IREF
[ ]
&
I
OUTMAX
[mA]
Fig.1. The relation between the value of external resistor R
IREF
and
maximum output current I
OUTMAX
Because presented IC drivers have 16 current outputs
each, then to drive POWER LED RGB, it is possible to
group outputs into 3 groups, with 5 paralleled outputs per
each group. In such circuit, the maximum forward current of
monochromatic components would be equal 400 mA.
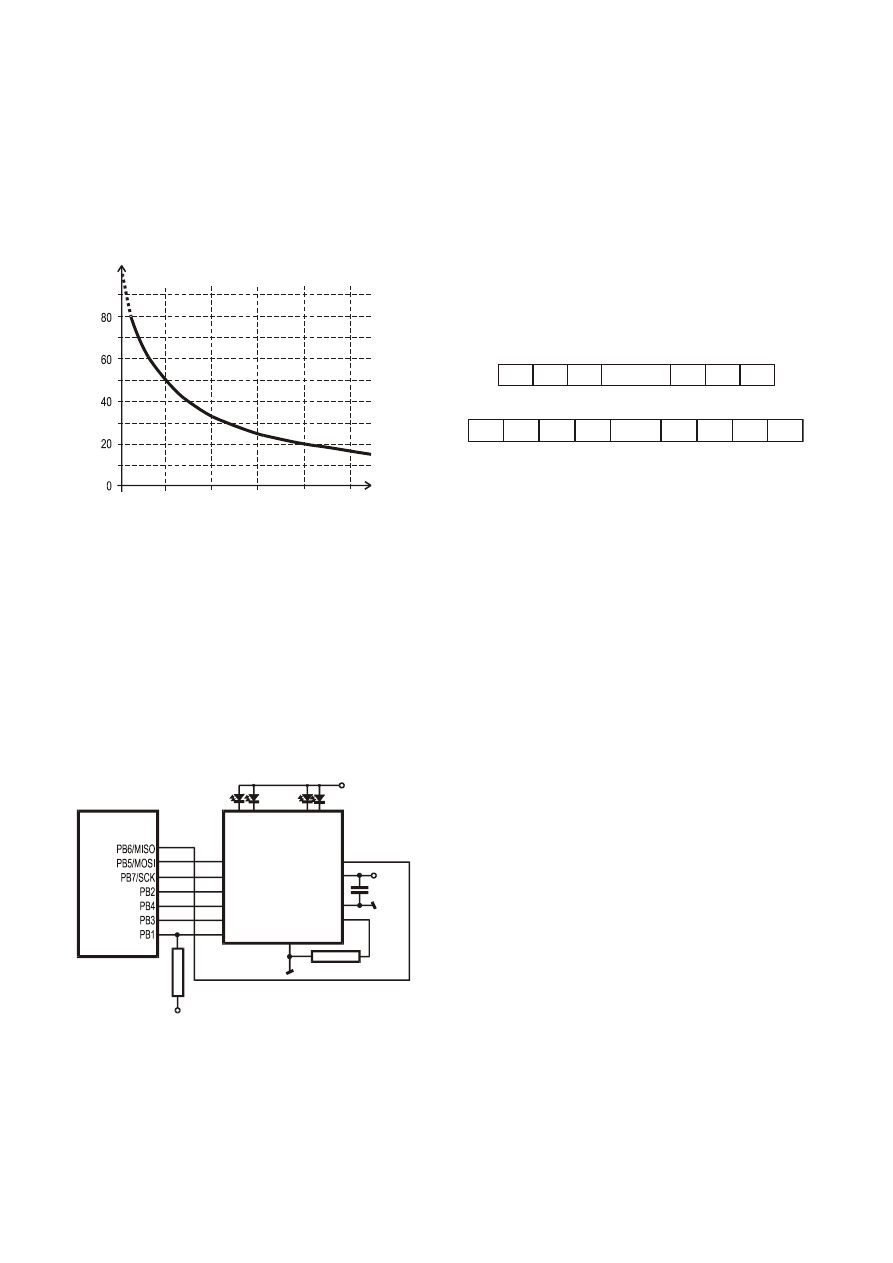
Co-operation with microprocessor system
The proper application circuit of TLLC5922/23/24
devices
uses
the
connection
with
supervising
microcontroller. Allowable supply voltage of ICs (3,3V - 5V)
lets for collaboration with either older or up-to-date
microcontrollers. The example circuit, with AVR controller,
is shown in figure 2.
!
SIN
SCLK
MODE
XLAT
BLANK
XERR
SOUT
VCC
GND
IREF
O
U
T
0
O
U
T
1
:
:
:
O
U
T
14
O
U
T
15
P
G
N
D
U
LED
R
IREF
U
CC
100nF
ATmega8515
TLC5923
U
CC
Fig.2.
Typical
application
-
connection
with
supervising
microcontroller
For co-operation between LED IC drivers and controller
the built-in SPI-slave interface is used. Using this interface
the supervising microcontroller can transfer to IC driver:
16-bit switching word, which bits switch on or off
independently all output channels (Fig.3a);
112-bit word, called dot-correction word, containing
sixteen 7-bit length coefficients DC
X
, programming each of
the 16 output current I
OUTX
(Fig.3b).
For distinguishing those both transmissions the
additional control input terminal, called MODE, is used.
Each transfer ends with the pulse on latching input XLAT.
The rising edge on XLAT input causes storing the serial
transferred data in appropriate internal register. Moreover,
TLC5923 and TLC5924 devices allow read out 16-bit error
word. It depends on reading the states of LED open
detection circuits in output channels, during falling edge of
XLAT signal into internal shifting register. That shifting
register can be read via serial data output SOUT using
sixteen clocking pulses on SCK input. According to SPI
standard, the simultaneous writing of switching word and
reading of error word is possible, too.
Fig.3. Control words for TLC5922/23/24 devices:
a - 16-bit switching word; b - 112-bit dot correction word with
coefficients DC
X
The open-drain (OD) output XERR is used to report
detected malfunctions in TLC5923/24 chips. The circuit-
break at least in one off enabled output channels or over-
temperature condition of IC structure pulls down that output.
Open-drain configuration allows to connect many such
outputs to a single line, to inform the microcontroller about
working errors of many LED drivers. This line can be either
periodically checked by microcontroller or used as its
external interrupt.
Especially useful, using supervising microcontroller, is
the possibility of individual output current adjustment. Each
of the 16 channel has its own 7-bit coefficient word DC
X
,
which value determines the actual output current of it. The
current adjustment range is from 0 mA up to I
OUTMAX
,
defined by external resistor R
IREF
(formula 2). That
adjustment range is divided into 128 equal steps. It means,
that if I
OUTMAX
is equal 80 mA the value of adjustment step is
equal 625 $A. This is a satisfied value for precise control of
RGB LED component currents. By appropriate changes of
coefficients DC
X
, we can control the LED brightness with
simultaneous stabilising the ordered colour of luminance.
Because LED devices are non-linear semiconductor
elements, brightness control can't be achieved by simple
scaling of DC
X
coefficients for monochrome components. In
that
case
additional
calculations,
using
working
characteristics ! = f(I
F
) for each monochrome component,
are necessary.
During driving POWER RGB LED with connected in
parallel N output channels, due to higher working currents,
we achieve very wide adjustment range of component
currents I
FR
, I
FG
, I
FB
. Because each of paralleled output
currents I
OUTX
, according to value of DC
X
coefficient, can
have independently any of 128 values from the range
<0 mA ; I
OUTMAX
>, the resultant currents can be adjusted in
the range <0 mA ; N · I
OUTMAX
>, in N · 128 steps each -
formula 4.
(4)
'
$
%
$
N
X
OUTX
X
)
GCB
(
FR
I
DC
I
1
DC15.6 . . . DC15.0 DC14.6
DC1.0 DC0.7
DC0.0
. . .
. . .
OUT15 OUT14 OUT13
OUT2 OUT1 OUT0
. . .
a)
b)
202 PRZEGL!D ELEKTROTECHNICZNY (Electrical Review), ISSN 0033-2097, R. 86 NR 10/2010
Selected results of tests
Data sheets of presented IC drivers states, that
maximum frequency of serial interface clocking signal is
equal 30 MHz. In practice, data transfer can have either
software or hardware implementation. The second one is
possible, if used microcontroller have built-in SPI-master
interface. The suitable testing software, written in machine
language, had been prepared for test circuit from figure 2.
Programmes were debugged and tested in IDE AVRStudio.
The realised tests with supervising microcontroller
ATmega8515, clocked frequency 10 MHz, allow to estimate
transfer execution times of most important control
operations for TLC5922/23/24. The results are presented in
table 2. The utilization of high level programming language
(like C) can cause little longer service times. It depends on
either applied programming techniques or selected compiler
optimization options.
Table
2.
Execution
times
of
software
and
hardware
implementations the main control operations for TLC5922/23/24
devices
Operation
Implementation
software
hardware
16b control word transfer
22,3 $s
9,1 $s
112b dot-correction word transfer
144,1 $s
82,1 $s
16b control word transfer with
simultaneous read out the error word
(doesn't match TLC5922)
25,7 $s
9,7 $s
switching the LED group using BLANK
signal
0,3 $s
0,3 $s
minimum SPI clocking period
0,4 $s
0,2 $s
The analysis of the table 2 contents leads to a
conclusion that: the usage of hardware SPI interface
increases the LED driver speed twice. Using hardware SPI
interface it's possible to update switching word to 100000
times per second, and current adjustment word can be
transferred about 10000 times per second. There are quite
satisfied values, according to human eyesight sense
perception ability. So if we don't operate with maximum
possible speed, we have free processor time, which can be
used for additional calculations, needed for example to
appropriate correction of current coefficients DC
X
during
brightness control.
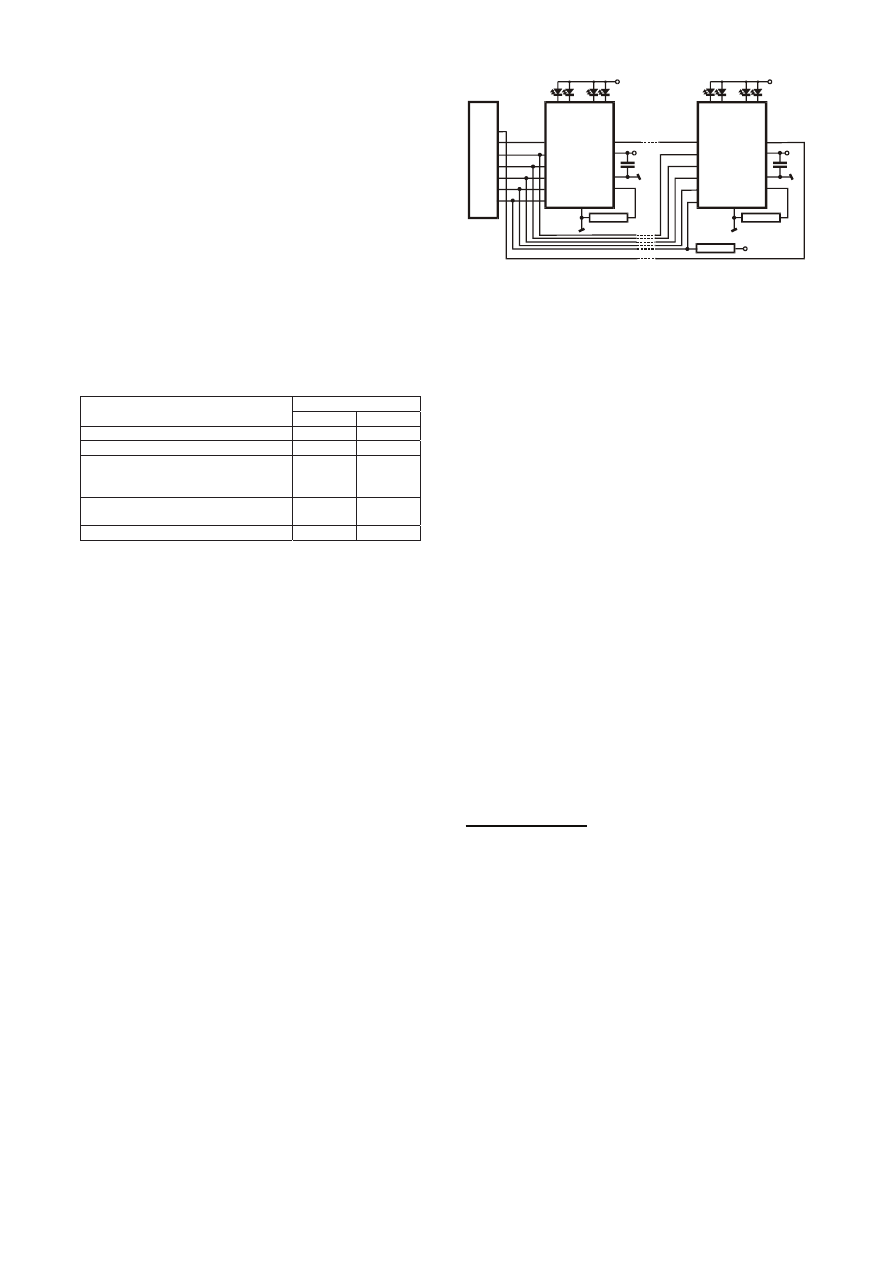
The possible high speed of LED driver service via
hardware SPI is an important observation due to sometimes
a big number of controlled drivers. Microcontroller
supervising of few or more drivers like TLC5922/23/24
becomes easier, because these chips can be cascaded on
SPI bus, as it's shown in figure 4.
SIN
SCLK
MODE
XLAT
BLANK
XERR
SOUT
VCC
GND
IREF
O
U
T
0
O
U
T
1
:
O
U
T
14
O
U
T
15
P
G
N
D
MISO
MOSI
SCK
PB2
PB4
PB3
PB1
U
LED
R1
U
CC
C1
U1
UD1
SIN
SCLK
MODE
XLAT
BLANK
XERR
SOUT
VCC
GND
IREF
O
U
T
0
O
U
T
1
:
O
U
T
14
O
U
T
15
P
G
N
D
U
LED
Rn
U
CC
Cn
UDn
U
CC
(C
Fig.4. Cascading TLC5922/23/24 LED drivers on SPI bus
Conclusion
Constant current driving of LED RGB diodes becomes
the alternative solution to the usually used driving circuits,
like switching supplying or PWM control. It is possible due
to new specialized integrated circuits - LED drivers,
provided controllable constant current. Presented in the
paper idea of adjusting monochrome component currents of
RGB diode, can be also widened to quad-colour LEDs,
which become to be more often applied in illuminating by
the reason of better colour rendering. Presented in the
paper ICs from Texas Instruments are not a unique devices,
also other firms offer constant current drivers.
Presented results are the part of research work No S/WE/1/06.
REFERENCES
1. Gilewski M., Karpiuk A.: Elektroniczna stabilizacja parametrów
%wietlnych LED RGB. Przegl"d Elektrotechniczny, 84 (2008),
nr 8, 194-198.
2. Wojtkowski W.: Wykorzystanie sprz&towych bloków PWM
mikrokontrolerów AVR do regulacji jasno%ci %wiecenia diod
LED du'ej mocy. Przegl"d Elektrotechniczny, 85 (2009), nr 11,
306-309.
3. Wojtkowski W.: Wielokana!owa regulacja jasno%ci %wiecenia
diod LED z wykorzystaniem uk!adów programowalnych FPGA.
Przegl"d Elektrotechniczny, 85 (2009), nr 11, 310-312.
4. Texas Instruments: TLC5922 LED driver. Datasheets on
www.ti.com. 2009.
5. Texas Instruments: TLC5923 16-channel LED driver with dot
correction. Datasheets on www.ti.com. 2005.
6. Texas Instruments: TLC5924 16-channel LED driver with dot
correction and pre-charge FET. Datasheets on www.ti.com.
2006.
7. Day M.: LED driver - Paralleled Outputs Provide High-Current
Outputs. Application report on www.ti.com. 2006.
Author: dr in#. Lech Grodzki, Politechnika Bia!ostocka, Wydzia!
Elektryczny, ul. Wiejska 45D, 15-351 Bia!ystok, E-mail:
lgrodzki@we.pb.edu.pl
Wyszukiwarka
Podobne podstrony:
Constant current driving of the LEDs group
Constant current driving of the LEDs group
fitopatologia, Microarrays are one of the new emerging methods in plant virology currently being dev
Melin E The Names of the Dnieper Rapids in Chapter 9 of Constantine Porphyrogenitus De administrando
Geoffrey de Villehardouin Memoirs or Chronicle of The Fourth Crusade and The Conquest of Constantin
THE GHOST SHIP Current state of research and project plan for maritime
Future Of The Dollar As World Reserve Currency Forbes
Aspden The Theory of the Proton Constants (1988)
Real world anti virus product reviews and evaluations the current state of affairs
A Kandzia ANZUS the history, current situation and perspectives of the strategic partnership betwee
Constance E Cumbey The Hidden Dangers Of The Rainbow
Aspden The Theory of the Gravitation Constant (1989)
Led Zeppelin Houses of the Holy
The law of the European Union
więcej podobnych podstron