Roboty przemysłowe
KRIM, AGH w Krakowie
1
Katedra Robotyki i Mechatroniki
Akademia Górniczo-Hutnicza w Krakowie
Wojciech Lisowski
5
Pomiar położenia i orientacji
Roboty przemysłowe

Roboty przemysłowe
KRIM, AGH w Krakowie
2
Zagadnienia:
Klasyfikacja metod pomiaru położenia i orientacji
Zasada pomiaru położenia i orientacji w metodach
referencyjnych
Czujniki pomiaru odległości stosowane
w metodach referencyjnych
Zastosowanie teodolitu do pomiaru położenia
i orientacji efektora
Zastosowanie systemu wizyjnego do pomiaru
położenia i orientacji efektora
Zastosowanie interferometru laserowego do
pomiaru położenia i orientacji efektora
Roboty przemysłowe
KRIM, AGH w Krakowie
3
Klasyfikacja metod wyznaczania pozycji efektora
METODY WYZNACZANIA
POZYCJI
CHWYTAKA/NARZĘDZIA
REFERENCYJNE
(LOKALNE)
GEODEZYJNE
(W CAŁEJ
PRZESTRZENI
ROBOCZEJ)
TRIANGULACYJNE
WIZYJNE
INTERFEROMETRYCZNE
Roboty przemysłowe
KRIM, AGH w Krakowie
4
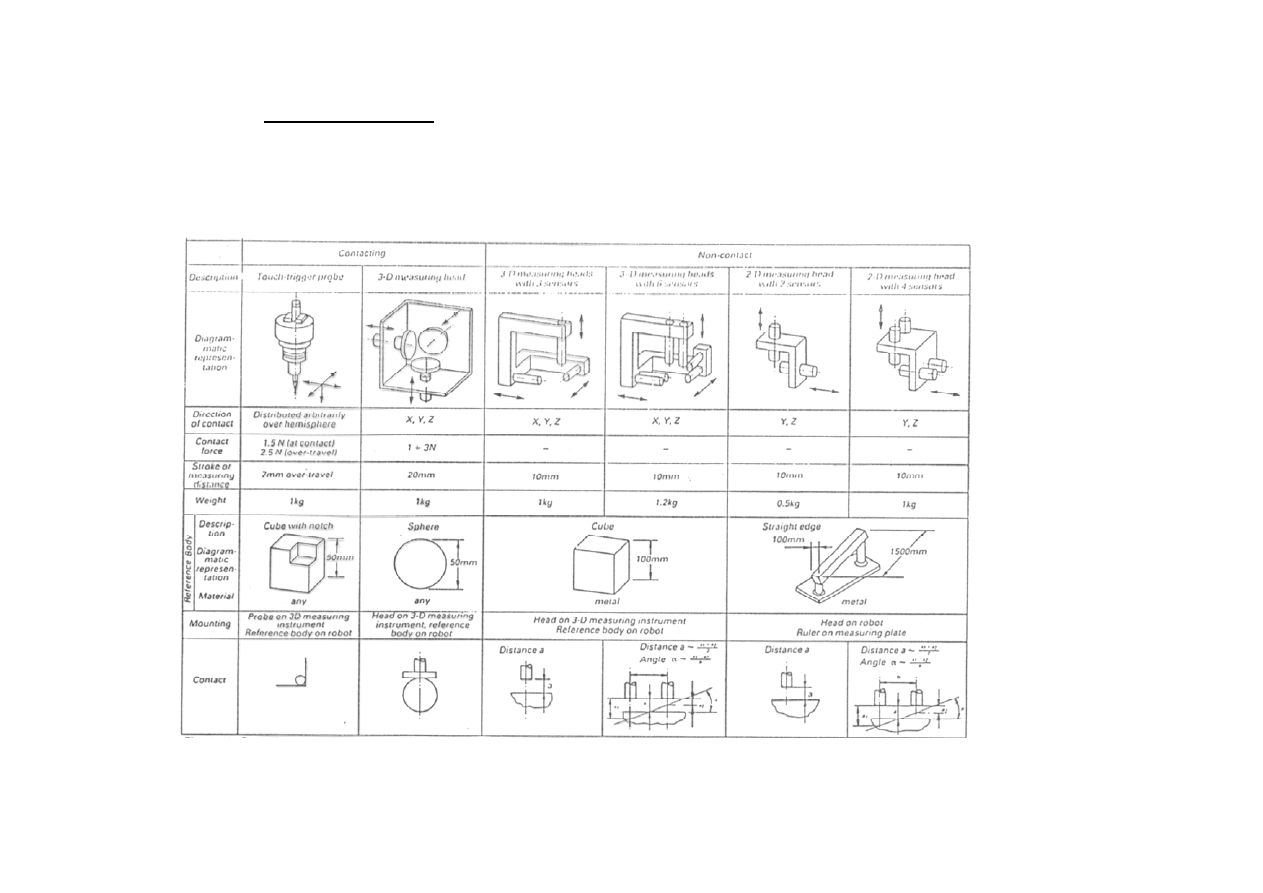
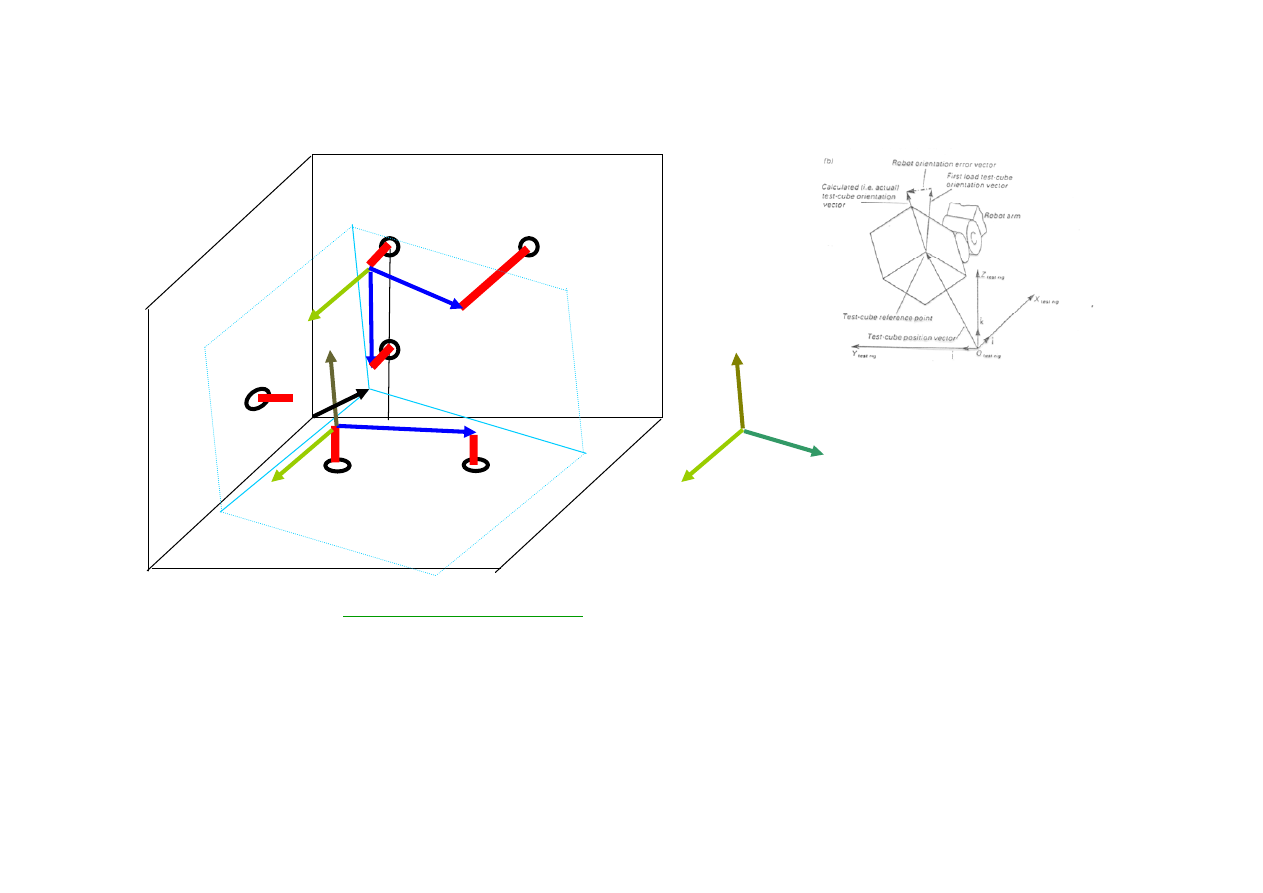
Koncepcje eksperymentalnego wyznaczania pozycji
Koncepcje eksperymentalnego wyznaczania pozycji
(Ranky)
Metody referencyjne pozwalają na wyznaczenie pozycji chwytaka/
narzędzia lokalnie w obszarze zamocowania modułu odniesienia.
Roboty przemysłowe
KRIM, AGH w Krakowie
5
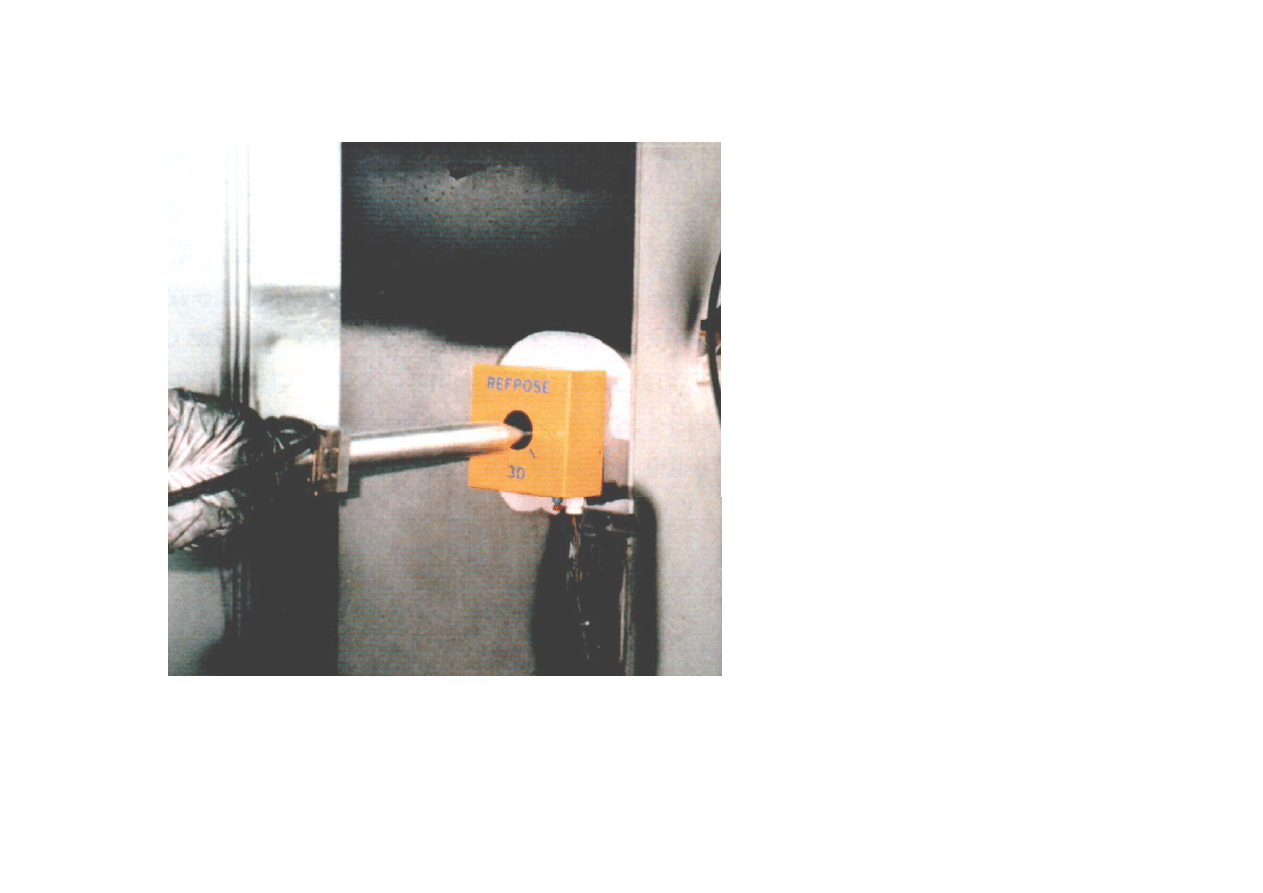
Przykład
Krypton, REFPOSE 3D
dokładność 0.1 mm
rozdzielczość 0.01 mm
szybkość pracy 100 Hz
zakres 10
×10×10 mm
Roboty przemysłowe
KRIM, AGH w Krakowie
6
P
1
P
2
P
3
P
4
P
5
P
6
n
1
n
2
n
3
O
P
Położenie – OP
Orientacja – n
1
, n
2
, n
3
Wymagana kalibracja głowicy pomiarowej w celu kompensacji
błędów wykonania kostki odniesienia oraz ustawienia czujników
Zastosowanie 9 czujników pozwala przeprowadzać częściową
autokalibrację (błędy kostki, ale nie czujników).
Wyznaczanie pozycji w metodzie kostki – 6 czujników
(Ranky)
Roboty przemysłowe
KRIM, AGH w Krakowie
7
TYP CZUJNIKA POMIARU
ODLEGŁOŚCI/
PRZEMIESZCZENIA
POMIAR
STYKOWY
ZAKRES
POMIAROWY
[mm]
ROZDZIELCZOŚĆ
[mm]
MECHANICZNY ZAGAROWY
TAK
50
0.001
LVDT
TAK
100
0.01
WIROPRĄDOWY
NIE
20
0.01
POJEMNOŚCIOWY
NIE
20
0.01
LASEROWY
NIE
100
0.001
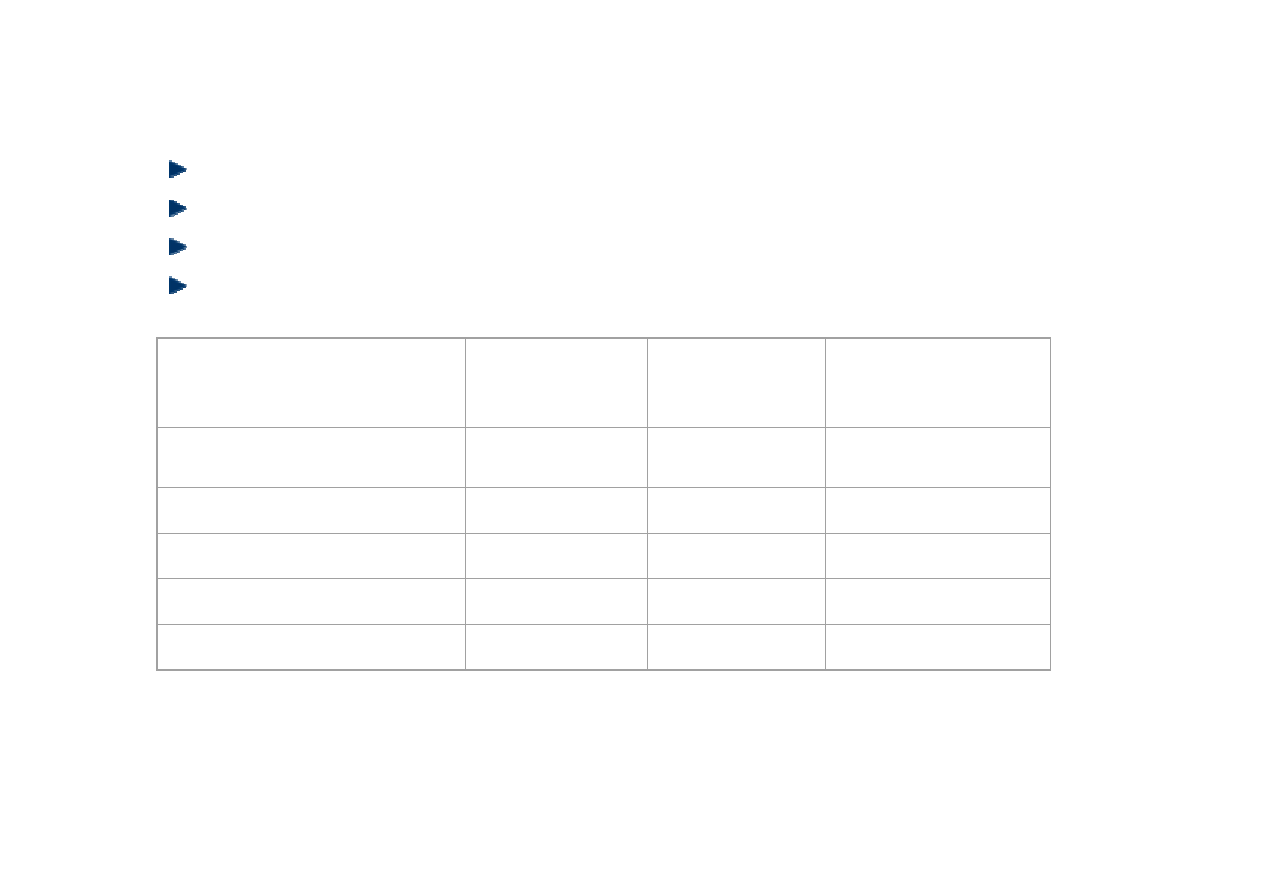
Do pomiaru odległości stosuje się czujniki:
zegarowe
LVDT (indukcyjne transformatorowe przetworniki położenia)
wiroprądowe, pojemnościowe, magnetostrykcyjne
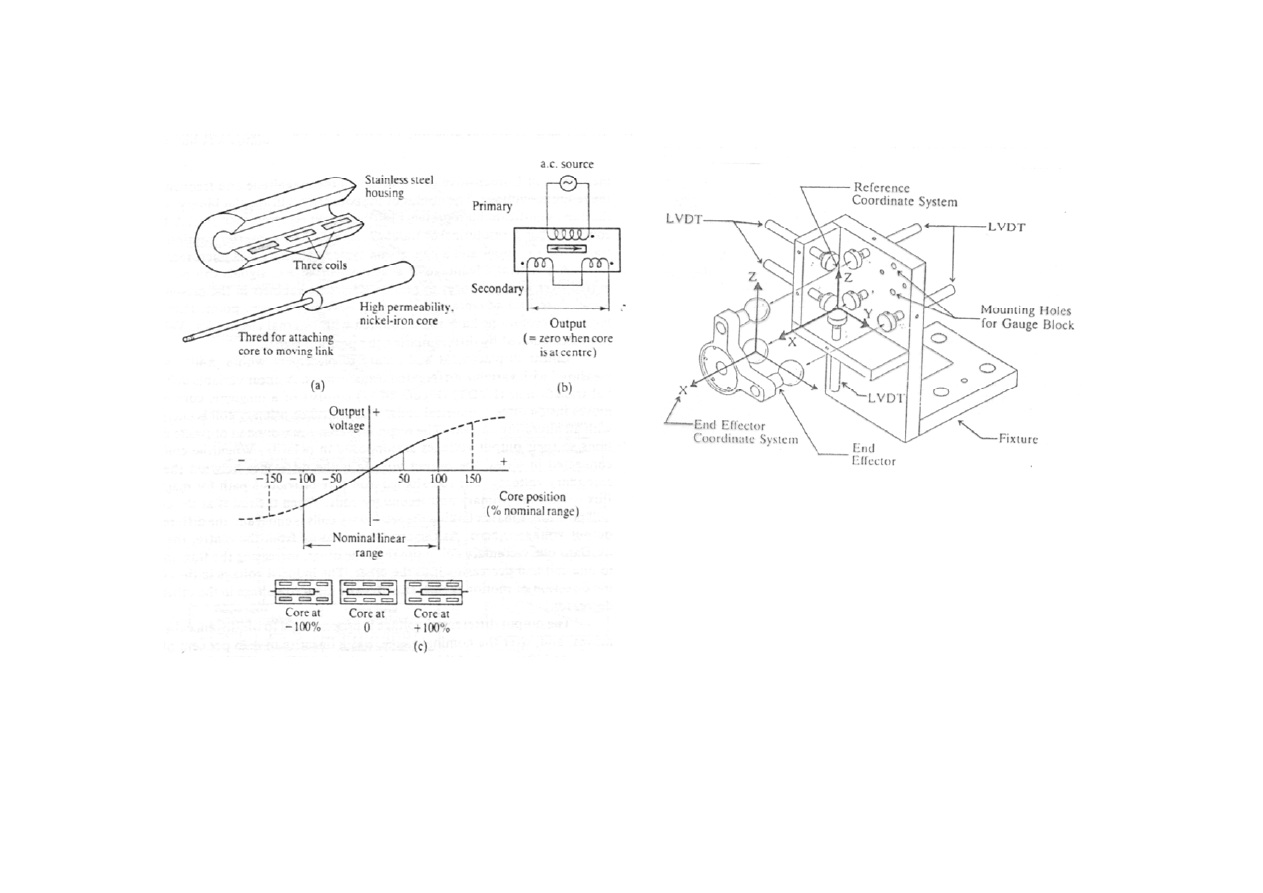
laserowe (dioda laserowa+element światłoczuły)
Dokładność pomiaru zależy od własności czujników i od cech
wieloczujnikowych głowic pomiarowych
Roboty przemysłowe
KRIM, AGH w Krakowie
8
Transformatorowy przetwornik położenia
(McKerrow)
Zastosowanie zestawu kul
wzorcowych
(Mooring)
Roboty przemysłowe
KRIM, AGH w Krakowie
9
Zastosowanie: czujników laserowych
(Tang)
Przykład:
Krypton REFCUBE 6D
, dokładność 0.1 mm,
rozdzielczość 0.02 mm, szybkość pracy 200 Hz,
warstwa przestrzeni pracy o grubości 10 mm
Roboty przemysłowe
KRIM, AGH w Krakowie
10
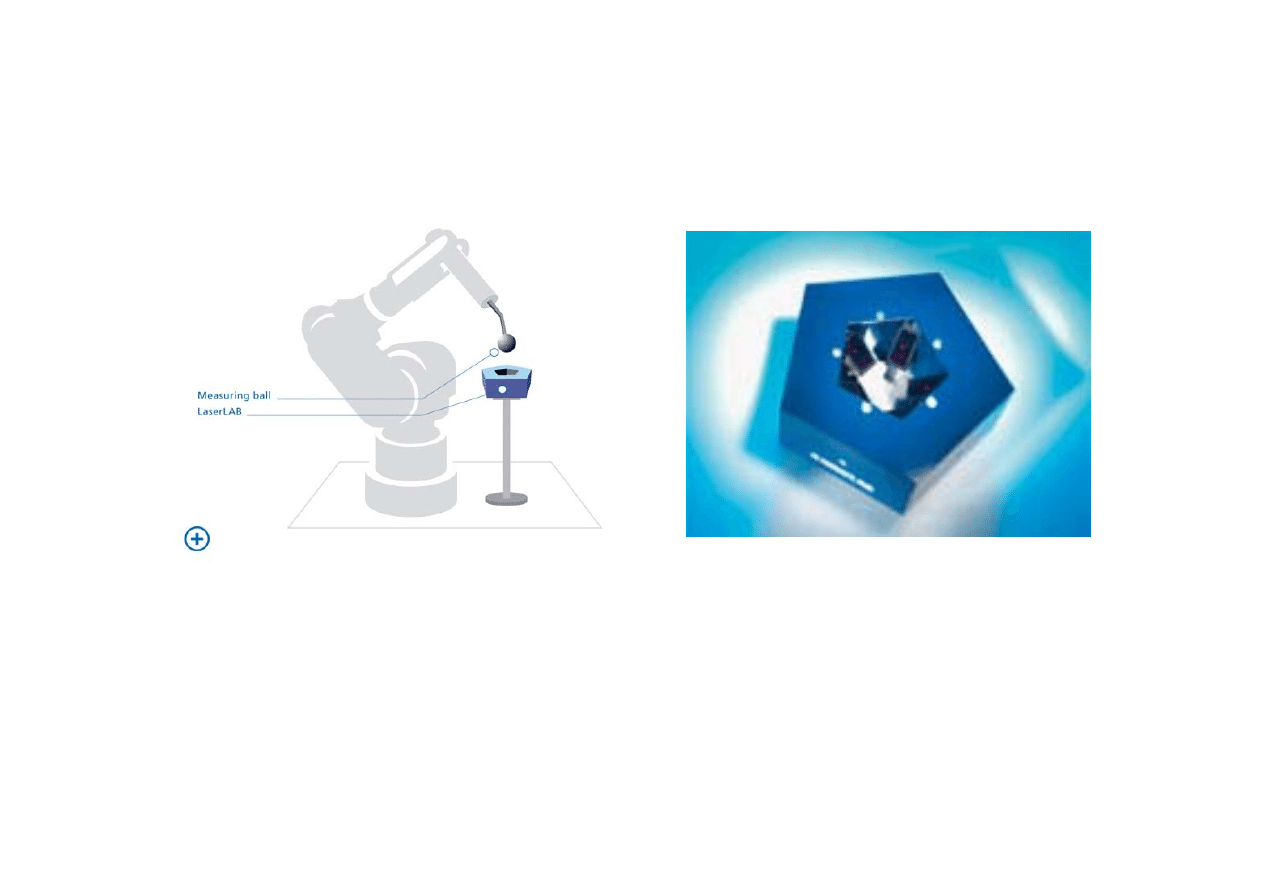
Przykład: Wiest AG,
LASERLAB 3D
5 czujników laserowych, dokładność 0.1 mm, 3D,
39.5mm ×38.5 mm × 36.5 mm
Zastosowanie: czujników laserowych

Roboty przemysłowe
KRIM, AGH w Krakowie
11
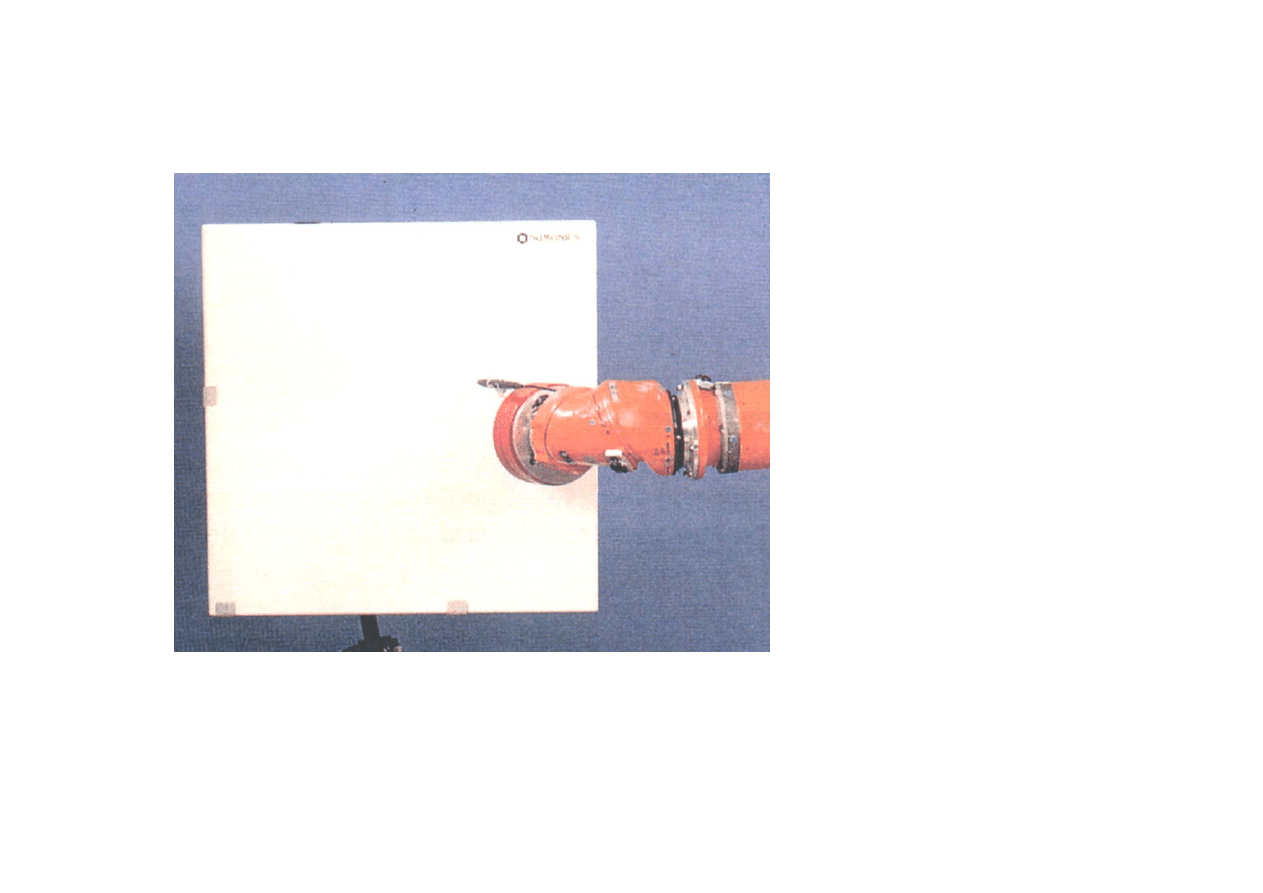
Zastosowanie systemów wizyjnych
Teconsult,
3D, ROSY, 2 kamery CCD
Roboty przemysłowe
KRIM, AGH w Krakowie
12
Krypton RODYM 2D
, dokładność 0.1 mm, rozdzielczość 0.01 m,
szybkość pracy 100 Hz, powierzchnia 0.5
×0.6 m
Wykorzystanie czujników wiroprądowych, magnetostrykcyjnych,
pojemnościowych i.t.p – trajektoria płaska
Roboty przemysłowe
KRIM, AGH w Krakowie
13
Grupa metod geodezyjnych pozwala na prowadzenie pomiaru
w znacznych obszarach przestrzeni roboczej.
Najwcześniej zastosowano metody triangulacyjne polegające na
śledzeniu wybranego punktu chwytaka/narzędzia z 2 lub 3 modułów
pomiarowych, których położenie wzajemne oraz względem robota
jest również wyznaczane doświadczalnie.
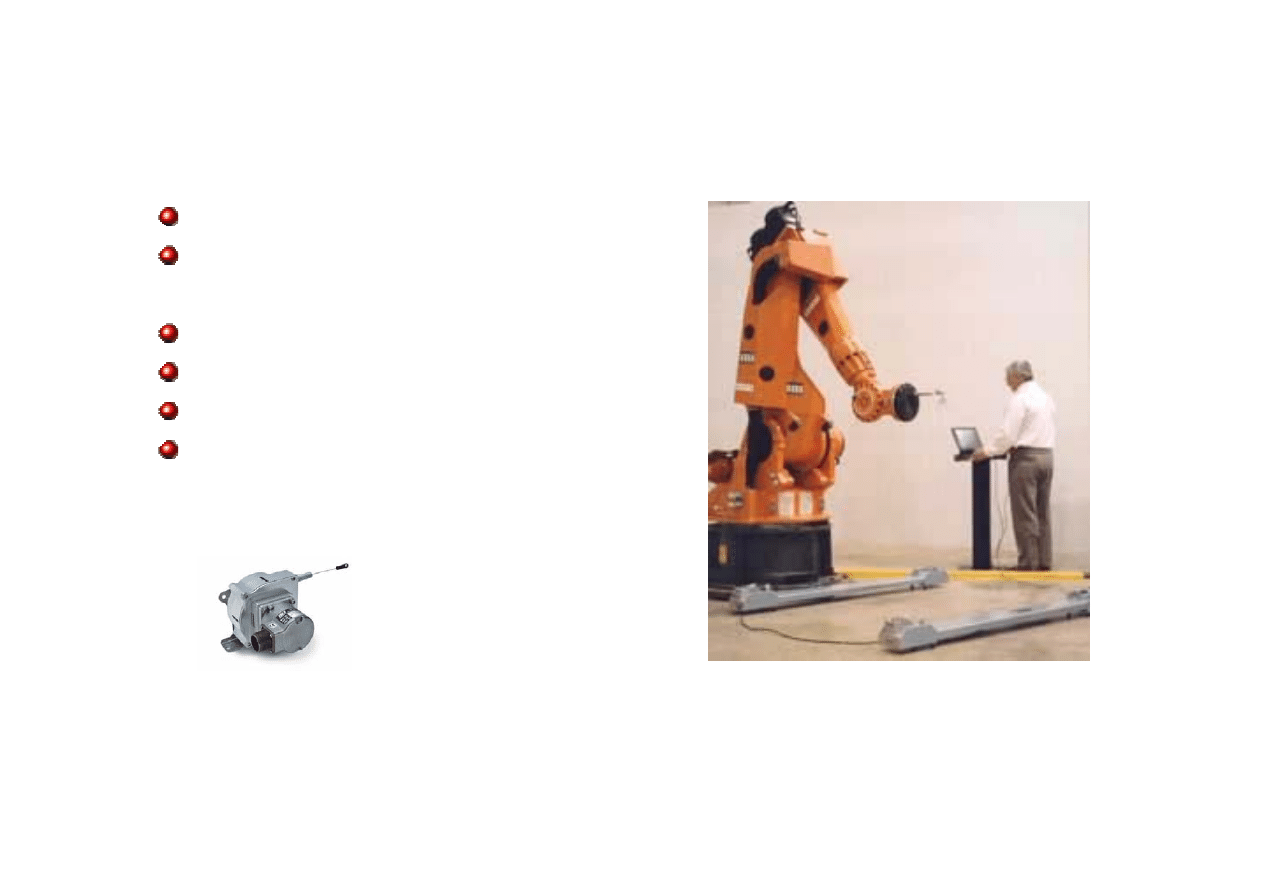
Powszechnie stosuje się
teodolity
,
W ograniczonym zakresie wykorzystuje się
przetworniki cięgnowe.
Wyznaczenie pozycji wymaga określenia orientacji przestrzennej
osi optycznych teodolitów lub długości pomiarowej cięgien
Roboty przemysłowe
KRIM, AGH w Krakowie
14
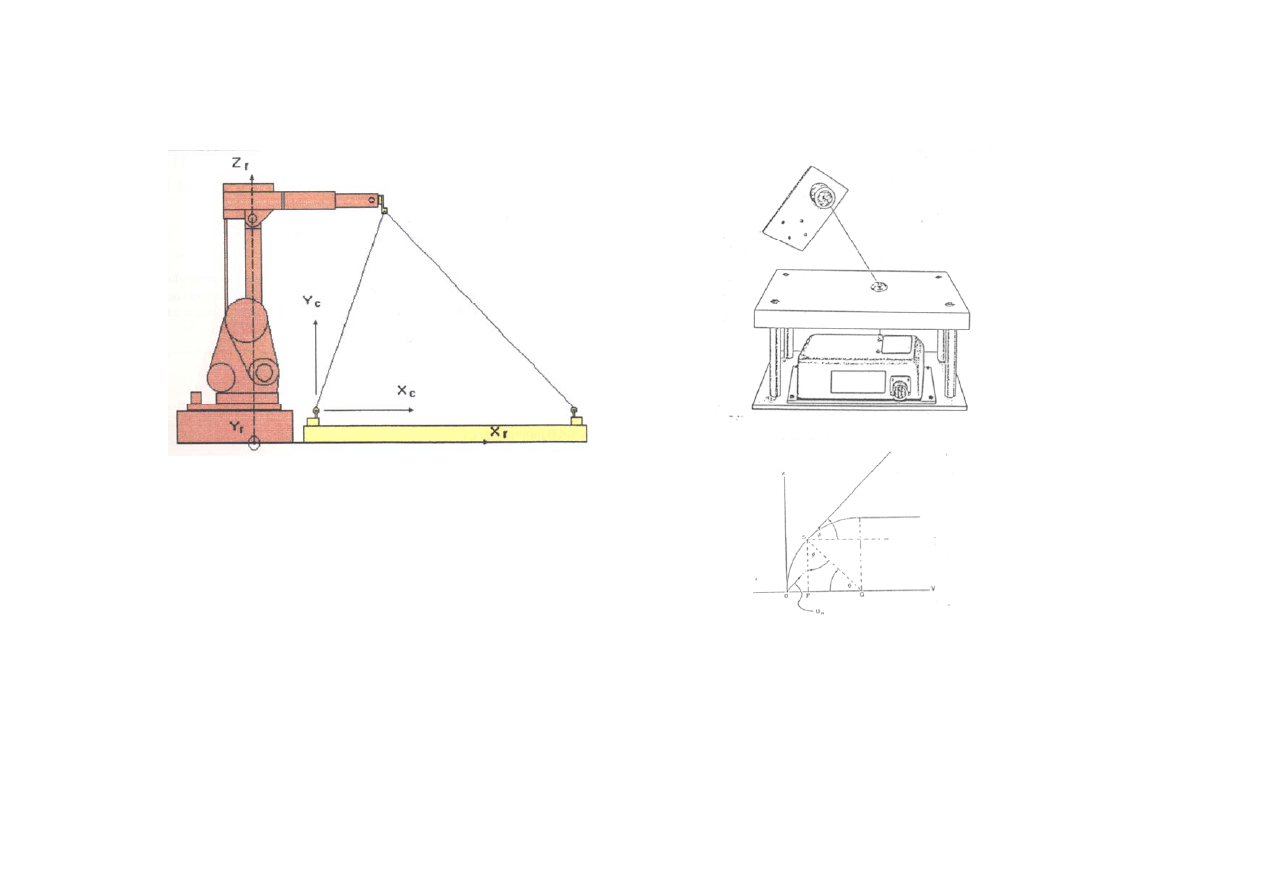
Płaski przetwornik cięgnowy (2D)
Krypton, RODYM CABLE 2D,
dokładność 0.1 mm,
rozdzielczość 0.02 mm, szybkość
pracy 2000 Hz, długość cięgien
1.5 m
Przetwornik przestrzenny (3D)
(Driels)
Roboty przemysłowe
KRIM, AGH w Krakowie
15
Przetworniki cięgnowe
Problemy konstrukcyjne:
wydłużanie się cięgien
wpływ bezwładności mas (enkoder,
bęben, cięgno)
oddziaływanie siłowe na efektor
szybkość zwijania cięgna
wyprowadzenie cięgna z głowicy
jak objąć całą PR, niebezpieczeństwo
kolizji cięgna z robotem
i urządzeniami towarzyszącymi
Dynalog, Inc.,
3D
(BEI)
Roboty przemysłowe
KRIM, AGH w Krakowie
16
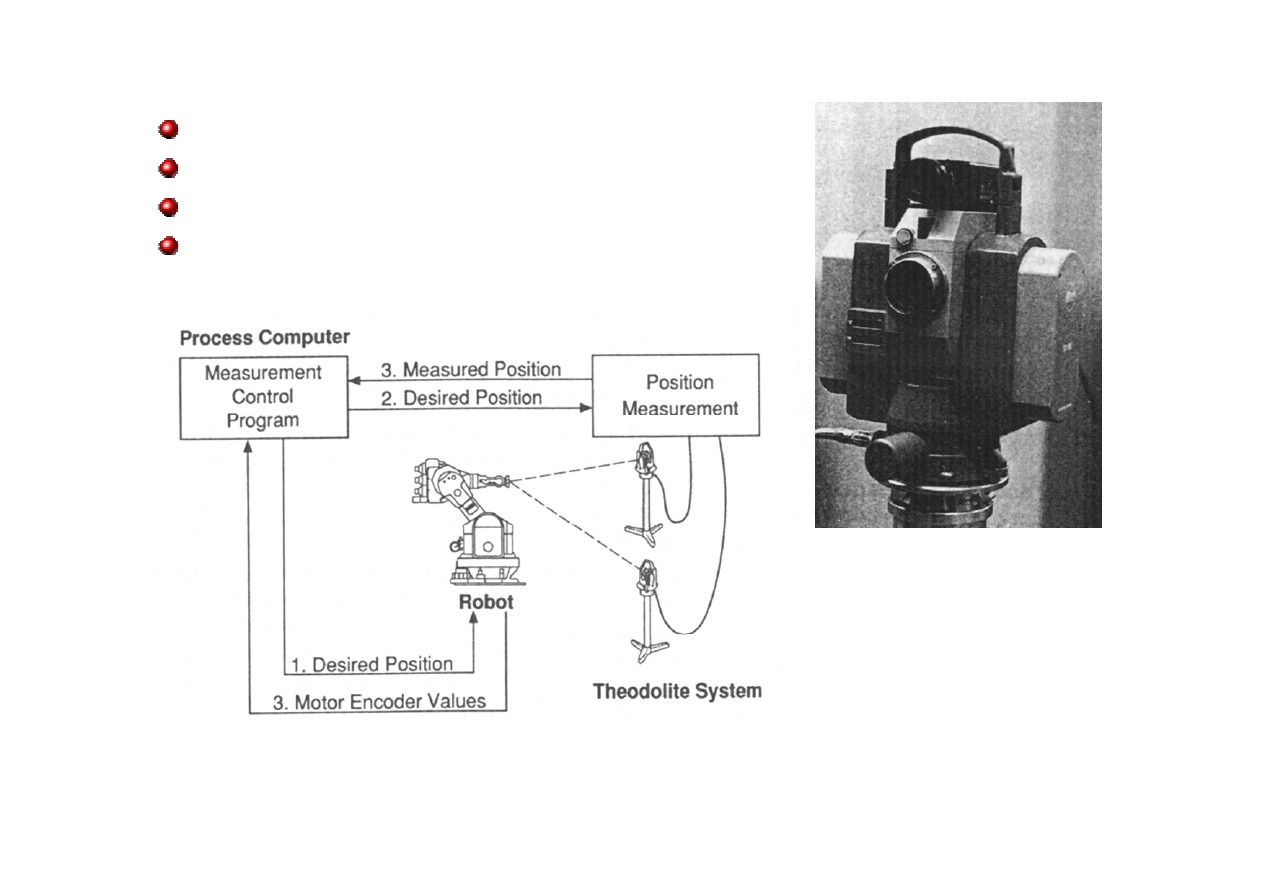
Teodolity
z napędami 2 osi obrotu
skomputeryzowane
sterowane w układzie zamkniętym
wyposażone w oprogramowanie
analizujące obraz.
(Meyer)
(Albright)
Roboty przemysłowe
KRIM, AGH w Krakowie
17
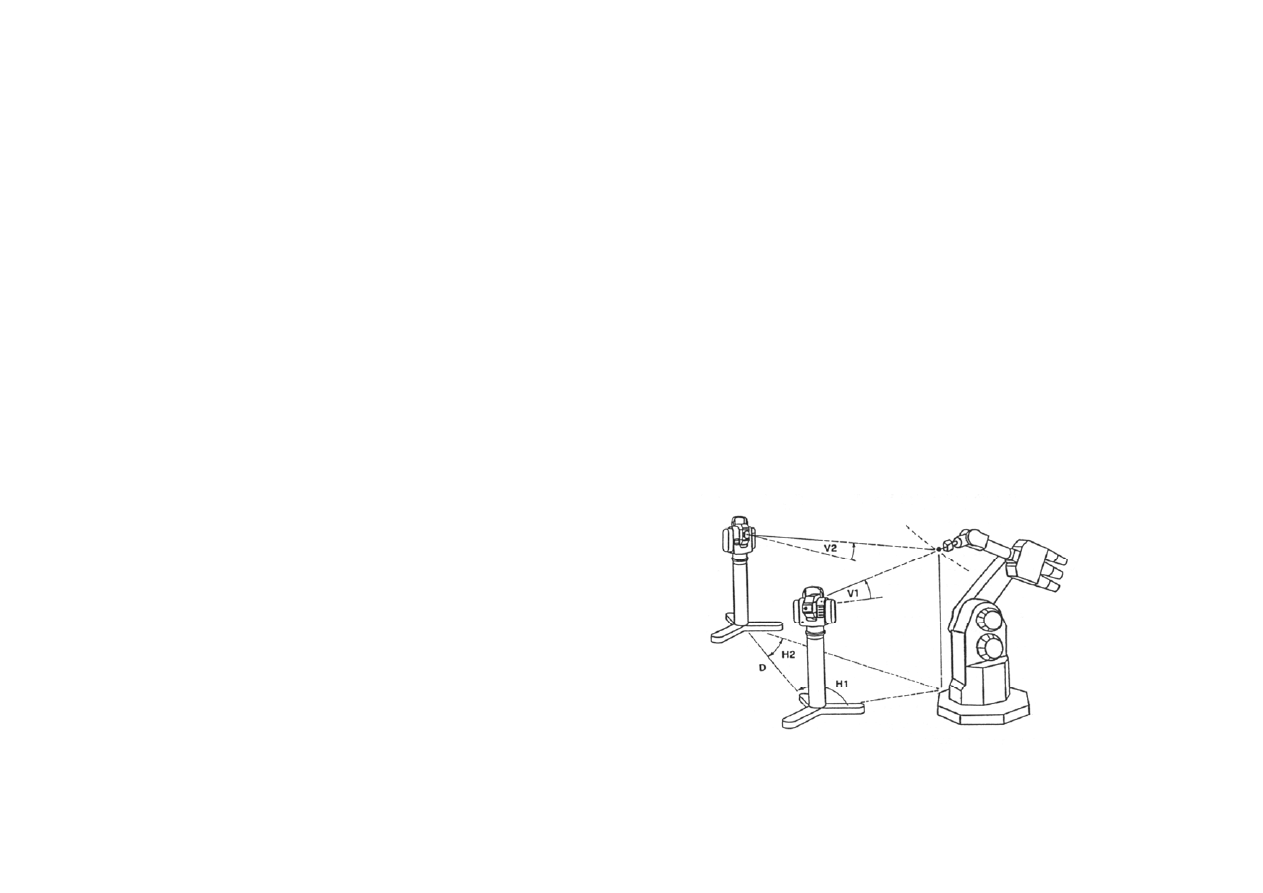
Pomiar odbywa się w spoczynku.
(Kyle)
Przejście do następnego punktu trajektorii jest zautomatyzowane lub
ręcznie przez operatora przy pomocy joystika.
Automatyczne ustawianie ogniskowej może służyć do zgrubnego
oszacowania odległości
Odczyt na podstawie kątów (rozdzielczość około 0.1 sekundy
kątowej) jakie tworzy oś optyczna teodolitu z kierunkami odniesienia
gdy jest ona nakierowana na cel.
Poziomnica pozwala wyznaczyć kierunek pionowy, od którego
odmierzane są kąty (najczęściej oprogramowanie usuwa przechylenie
automatycznie z wyników pomiaru).
Możliwy pomiar orientacji
Pomiar zaczyna kalibracja zespołu
teodolitów
Roboty przemysłowe
KRIM, AGH w Krakowie
18
(Kyle)
Problemy pomiarowe:
kąty między osiami optycznymi teodolitów powinny być bliskie
prostemu a odległości celu od teodolitów małe
refrakcja (nieprostoliniowa droga promienia świetlnego)
stabilność zamocowania (drgania, efekty cieplne, luzy)
Roboty przemysłowe
KRIM, AGH w Krakowie
19
Leica,
Total Station TDA5005
Pomiar położenia: 0.3 mm/m
Pomiar odległości: 0.2 mm/m
Zasięg 500 m
(Leica Geosystems)
Krypton, RODYM LTD 500 3D (Leica),
dokładność 0.01 mm/m,
rozdzielczość 0.0012 mm, 0.14 ”, obrót w płaszczyźnie poziom.
±235°
obrót w płaszczyźnie pion.
±45°, zasięg 0-35 m
Przykłady:
Roboty przemysłowe
KRIM, AGH w Krakowie
20
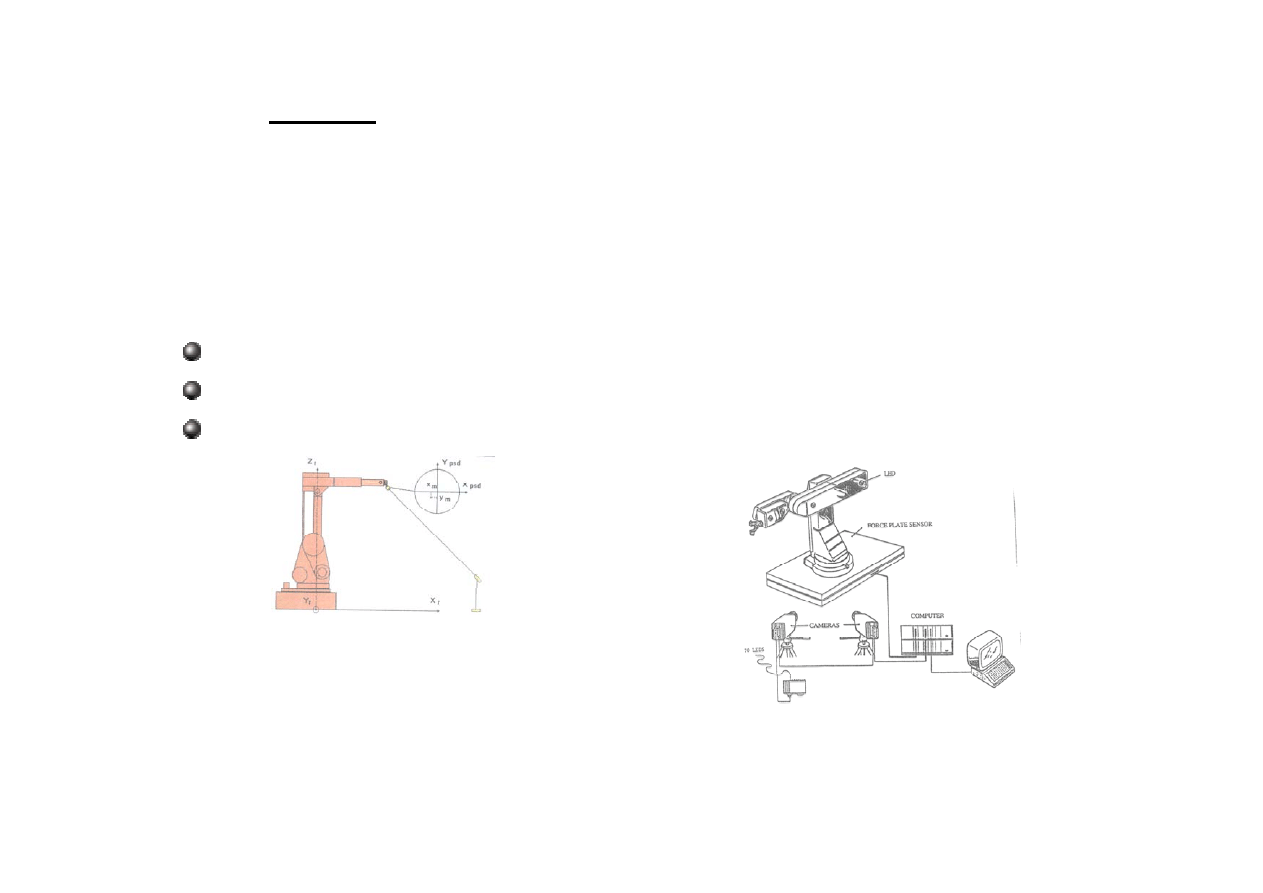
Metody wizyjne
- komputerowa analiza obrazu z wielu kamer
- do efektora jest mocowany w odpowiedni sposób zespół diod, których
położenie jest śledzone przez zespół kamer o znanym położeniu
i orientacji
Problemy zastosowania:
jak objąć całą przestrzeń roboczą?
rozmiary diod
opóźnienie wprowadzane w czasie obróbki obrazu (w czasie ruchu)
(Raucent)
Krypton, REFLINE 2D/3D
, dokładność 0.03 mm,
rozdzielczość 0.005 mm, zakres przemieszczeń
20mm
×20mm×10m
Możliwość pracy z przetwornikiem cięgnowym (3D)
Roboty przemysłowe
KRIM, AGH w Krakowie
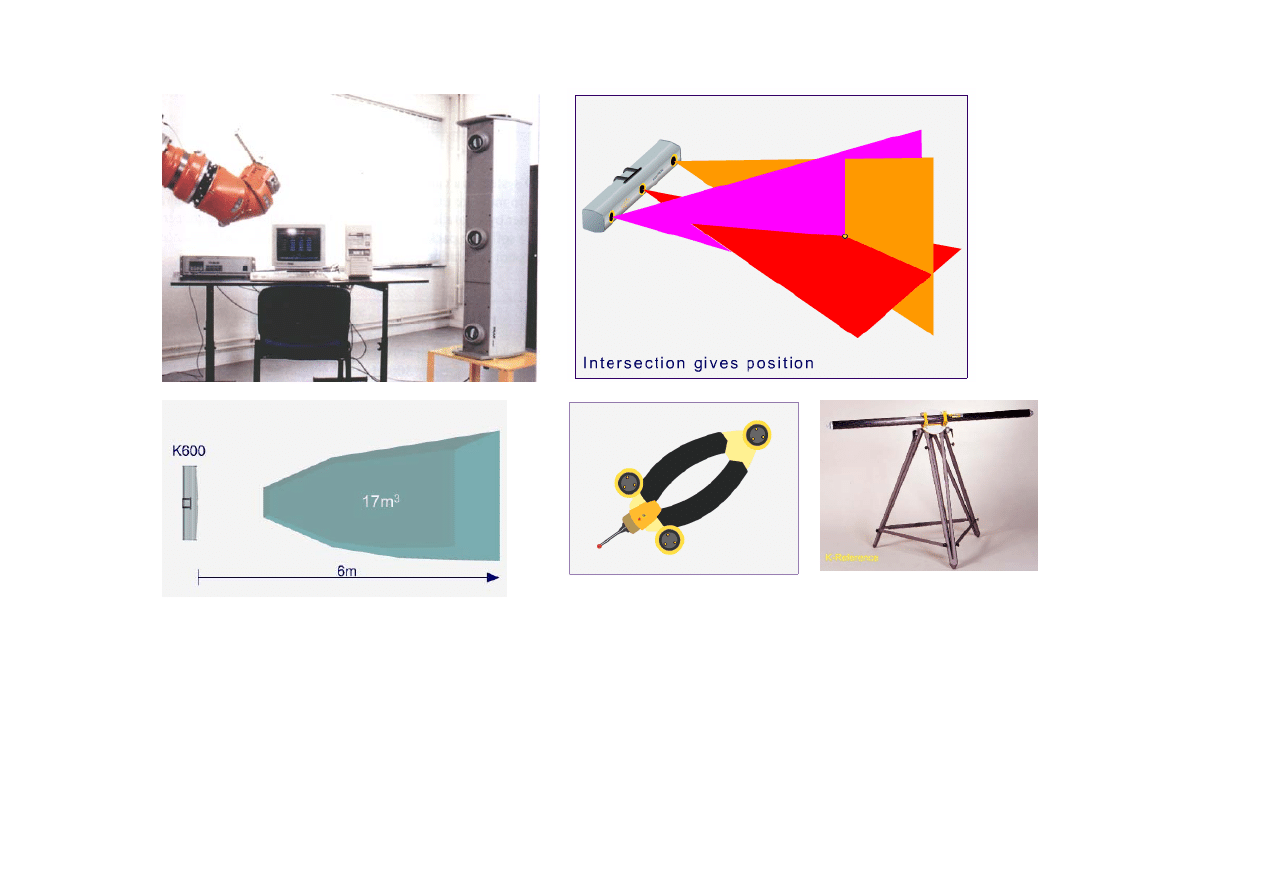
21
Metris (Krypton) K600
, dokładność 0.06 mm/m, rozdzielczość 0.002
mm, obrót w poziomie 360º, w pionie
±60 º, szybkość pracy 600 Hz
Roboty przemysłowe
KRIM, AGH w Krakowie
22
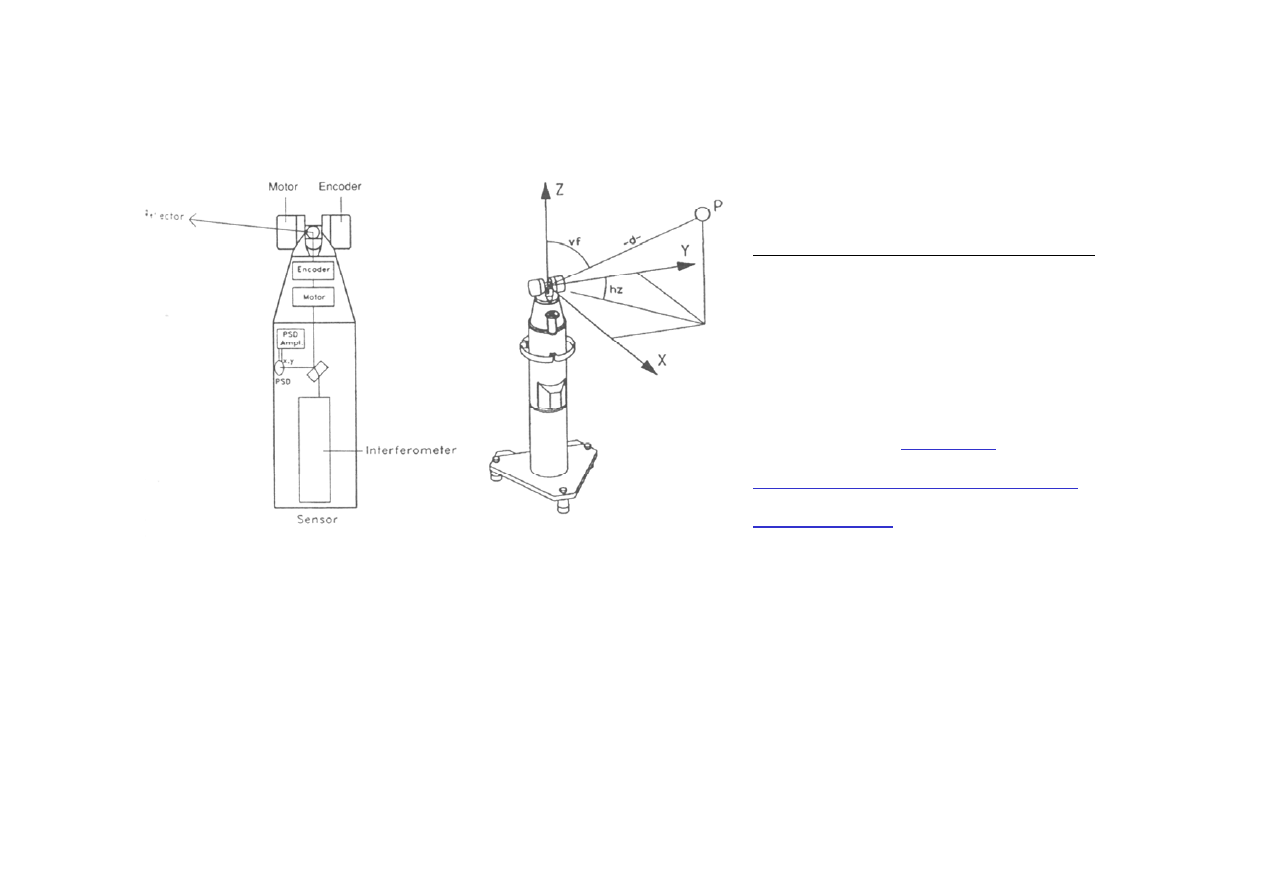
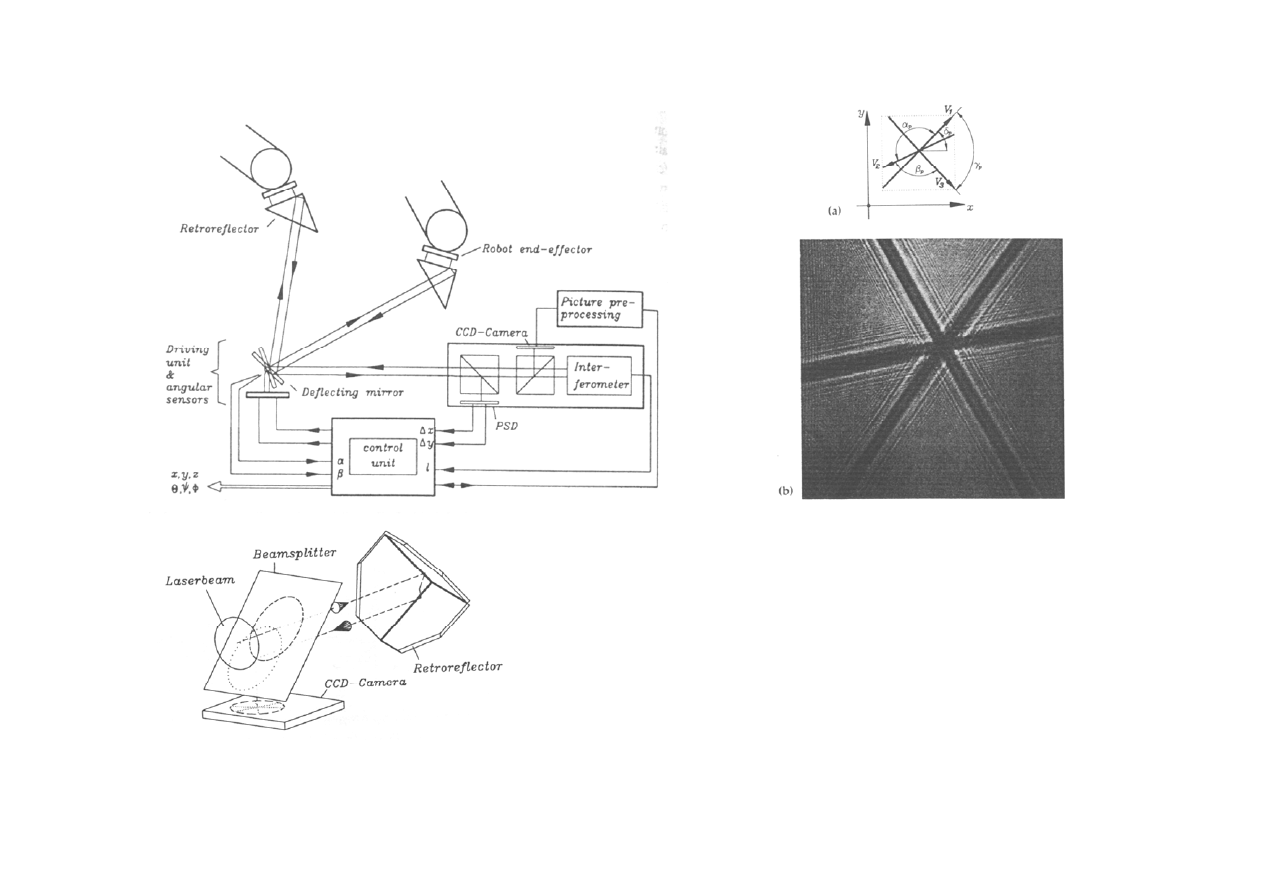
Metody interferometryczne
przez laser, odbitego od zwierciadła (ang. retroreflector) zamocowanego
do kołnierza kiści manipulatora i docierającego do interferometru oraz
orientacji zwierciadła pośredniego
, odbijającego wiązkę światła w
kierunku zwierciadła zamocowanego do manipulatora.
Zastosowanie
interferometru laserowego
pozwala wykorzystać w
pomiarze
pojedynczy
moduł pomiarowy
dzięki
równoczesnemu
pomiarowi
zmiany
długości drogi promienia
świetlnego
emitowanego
(Kyle)
Roboty przemysłowe
KRIM, AGH w Krakowie
23
Wyznaczanie położenia i orientacji
(Prenninger)
Dokładność pomiaru do 0.5 długości fali.
Zasięg około 20 m
Zakres kątów: poziomo – kąt pełny,
pionowo
±45
o
Prędkość śledzenia: promieniowo 1m/s,
stycznie 2 m/s.
Roboty przemysłowe
KRIM, AGH w Krakowie
24
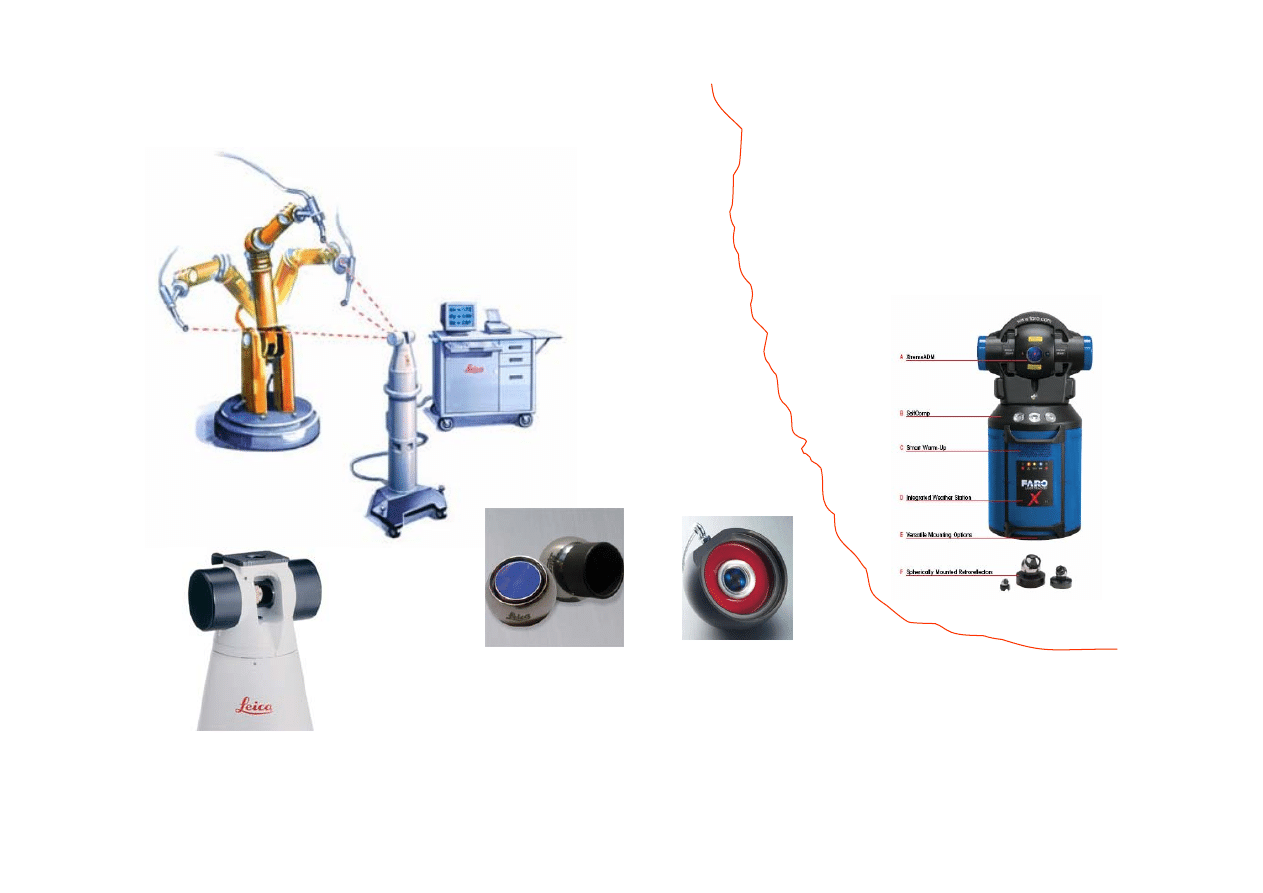
Przykłady implementacji
(ABB)
Leica Geosystems
Laser Tracker LTD 500
Dokładność 0.01 mm/m
Zasięg 40 m
cat eye ± 60°
730 g, d 75 mm
(retro)reflector ± 50°
7g, d 12 mm
Faro
Laser Tracker X,
Dokładność 0.01 mm/m.
Zasięg 70 m, 10 kHz
Roboty przemysłowe
KRIM, AGH w Krakowie
25
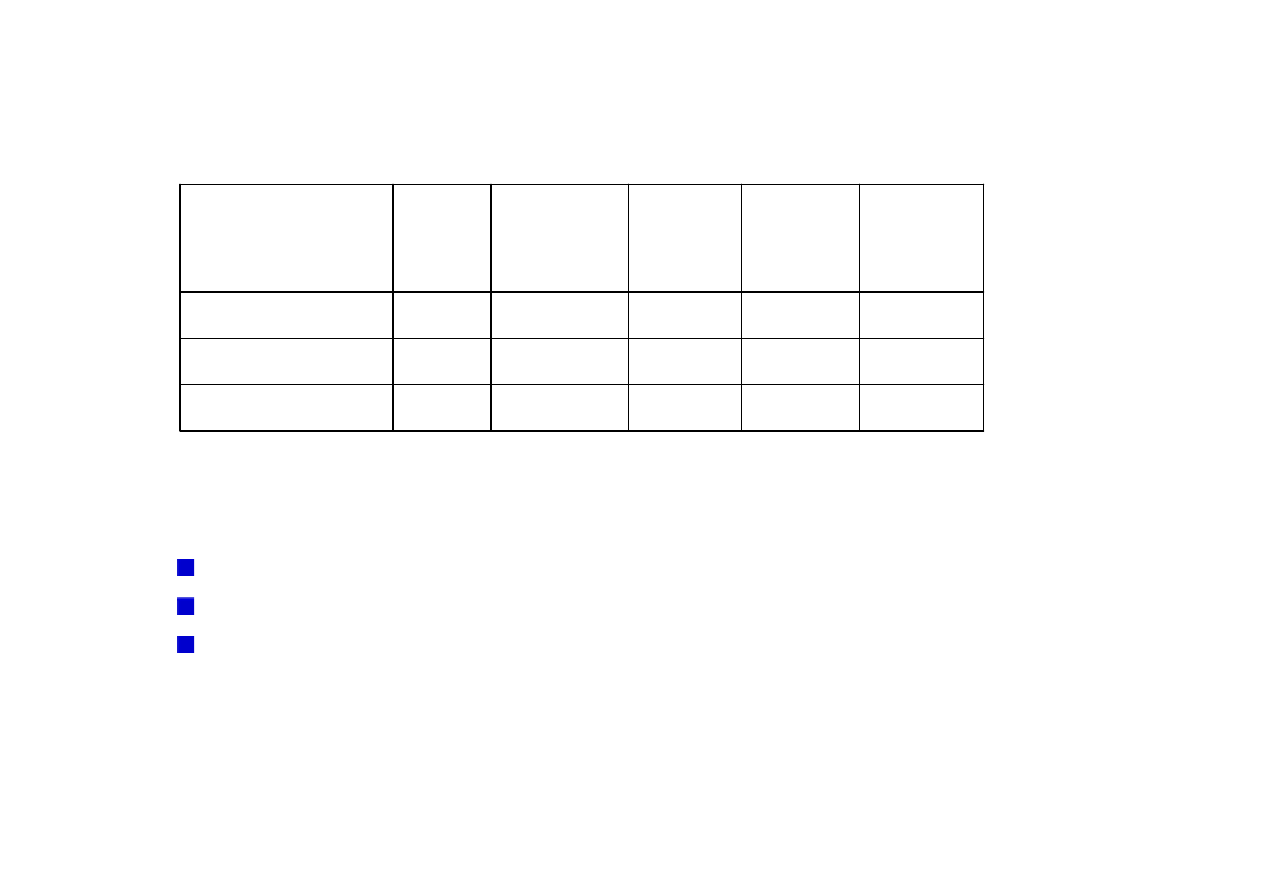
Systemy pomiarowych stosowanych w metodach geodezyjnych
Tendencja rozwoju systemów pomiarowych:
umożliwienie przeprowadzenia pomiaru:
w możliwie najbardziej zautomatyzowany sposób
w rzeczywistym otoczeniu pracy robota
w czasie ruchu manipulatora.
0.01
TAK
TAK
TAK
NIE
INTERFEROMETR
0.05
TAK
TAK
TAK
NIE
SYSTEM WIZYJNY
0.01
NIE
TAK
TAK
NIE
TEODOLIT
Dokładność
[mm/m]
Pomiar w
ruchu
Dowolna
trajektoria
Wyznaczanie
orientacji
Pomiar
stykowy
Typ układu pomiaru
odległości
przemieszczenia
Wyszukiwarka
Podobne podstrony:
5 Pomiar położenia i orientacji
2 Opis położenia i orientacji efektora w przestrzeni trójwymiarowej
2 Opis położenia i orientacji efektora w przestrzeni trójwymiarowej
Pomiary błędów położenia , kierunkowości zespołów maszyn i urządzeń technologicznych wykres 2
sprawozdanie pomiary bledow ksztaltu i polozenia osi otworow gniazd lozyskowych
Pomiary błędów położenia , kierunkowości zespołów maszyn i urządzeń technologicznych sprawko 5
Pomiary błędów położenia , kierunkowości zespołów maszyn i urządzeń technologicznych sprawko 7
pomiary odchyłek kształtu i położenia sprawozdanie
POMIARY ORIENTUJĄCE, GEODEZJA(14)
Pomiary odchyłek kształtu i położenia, Sprawozdania
Pomiary błędów położenia , kierunkowości zespołów maszyn i urządzeń technologicznych sprawko 2
Pomiary błędów położenia , kierunkowości zespołów maszyn i urządzeń technologicznych sprawko 6
Pomiary błędów położenia , kierunkowości zespołów maszyn i urządzeń technologicznych sprawko 4
Pomiary błędów położenia , kierunkowości zespołów maszyn i urządzeń technologicznych wykres 1
3 2 Orientowanie pomiarów geodezyjnych ppt
Pomiary błędów położenia , kierunkowości zespołów maszyn i urządzeń technologicznych sprawko 1
Pomiary wymiarów, położenia i przemieszczeń 2
więcej podobnych podstron