Języki Programowania Robotów
AdeptOne V/V+
KOMUNIKACJA CYFROWE WE/WY
Instrukcje sterujące programem
Akademia Górniczo-Hutnicza
Wydział Inżynierii Mechanicznej i Robotyki
Języki Programowania Robotów
1
Podział Instrukcji sterujących
Akademia Górniczo-Hutnicza
Wydział Inżynierii Mechanicznej i Robotyki
Języki Programowania Robotów
2
¾
Bezwarunkowe
(
GOTO, CALL, CALLS)
¾
Przerwania (
WAIT , WAIT.EVENT, REACT, REACTI, REACTE,
HALT, STOP, PAUSE, BRAKE, BREAK, DELAY
)
¾
Logiczne (true , false)
¾
Warunkowe (IF...GOTO, IF...THEN...ELSE, CASE...value OF
)
¾
Pętle (FOR, DO...UNTIL, WHILE...DO)
Instrukcje bezwarunkowe
Akademia Górniczo-Hutnicza
Wydział Inżynierii Mechanicznej i Robotyki
Języki Programowania Robotów
3
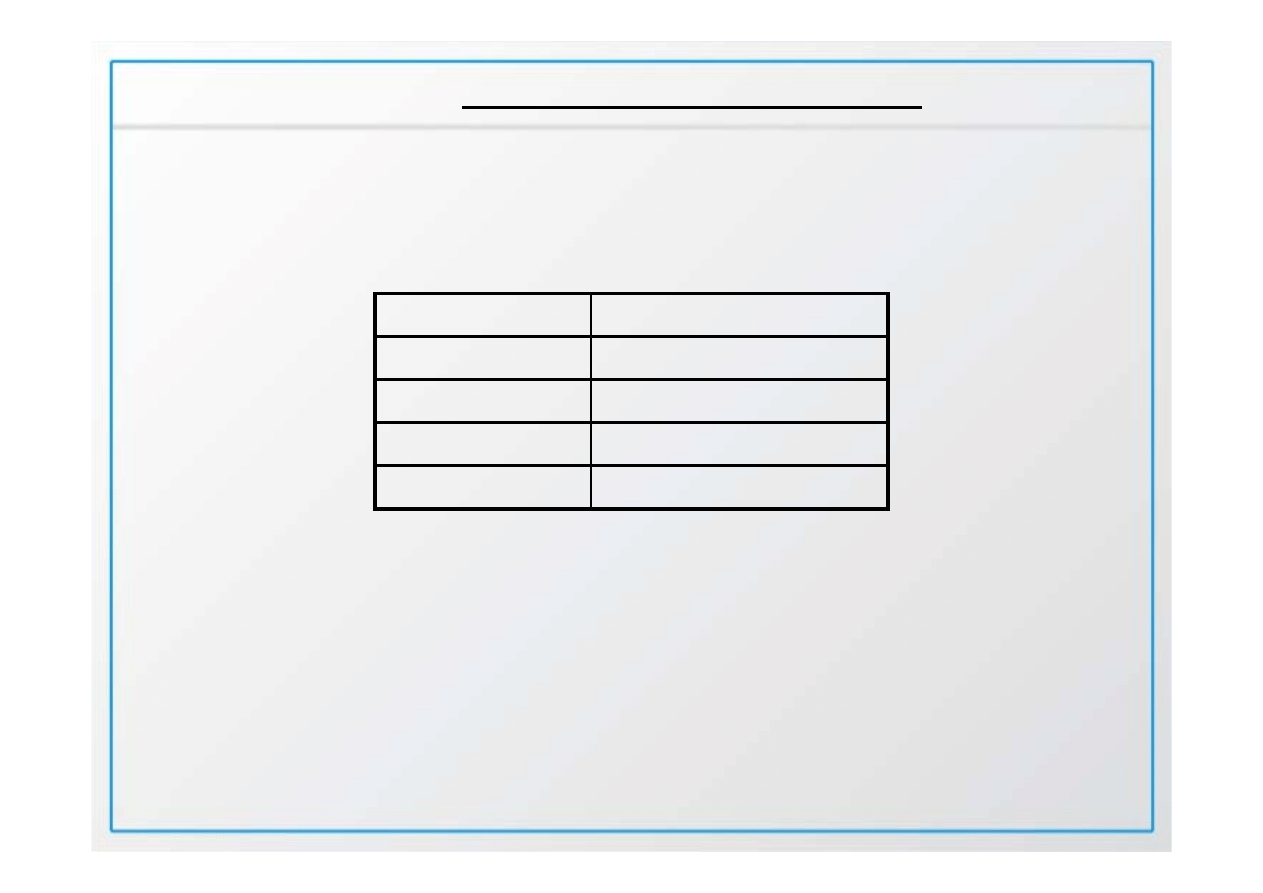
Krótki opis:
Komenda
Wywołanie podprogramu
CALLS
Wykonanie podprogramu
CALL
Polecenie skoku
GOTO
Są to instrukcje wykonywane zawsze niezależnie od żadnych parametrów
stanu robota
GOTO
Akademia Górniczo-Hutnicza
Wydział Inżynierii Mechanicznej i Robotyki
Języki Programowania Robotów
4
Polecenie to powoduje skok do zadanej lokalizacji
Składnia:
GOTO miejsce
Gdzie miejsce – lokalizacja skoku przed
lub za instrukcją goto
Przykład:
61 .
62 GOTO 100
63 .
64 .
65 100TYPE
-miejsce docelowe
66
.
CALL
Akademia Górniczo-Hutnicza
Wydział Inżynierii Mechanicznej i Robotyki
Języki Programowania Robotów
5
Polecenie wywołujące podprogram znajdującego się w pamięci
systemu
Składnia:
CALL program (arg_list)
program – nazwa programu
arg_list- argumenty przekazywane do niego
Przykład:
48 .
49 CALL check (locx, locy, length)
50 .
CALLS
Akademia Górniczo-Hutnicza
Wydział Inżynierii Mechanicznej i Robotyki
Języki Programowania Robotów
6
Polecenie to działa w identyczny sposób jak polecenie call
ponadto umożliwia ono dostęp do programów których nazwy są
przypisane w zmiennej typu string
Składnia:
CALLS program (arg_list)
program – nazwa programu
arg_list- argumenty przekazywane do niego
Przykład:
47 .
48 $program_name = $program_list[program_select]
49 CALLS $program_name(length, width)
50 .
Przerwania
Akademia Górniczo-Hutnicza
Wydział Inżynierii Mechanicznej i Robotyki
Języki Programowania Robotów
7
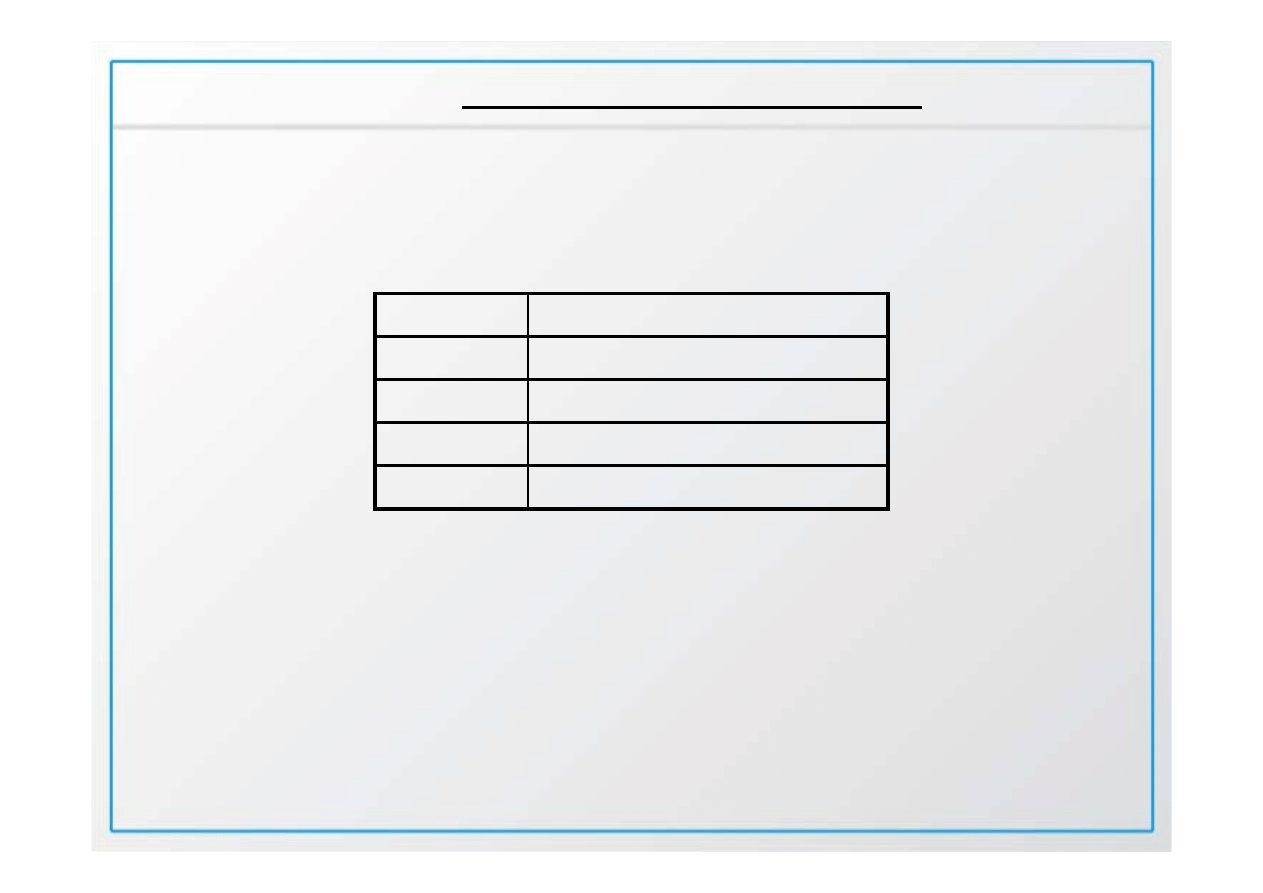
Instrukcje przerwań dla błędów systemowych
REACTE
Instrukcje przerwania programu lub podprogramu
HALT, STOP,
PAUSE
Instrukcje zatrzymania programu, robota
BRAKE, BREAK,
DELAY
Krótki opis:
Komenda
Instrukcje przerwań
REACT REACTI
Instrukcja oczekiwania
WAIT
WAIT.EVENT
Komendy służące do komunikacji robota z otoczeniem i jego reakcji np.
oczekiwanie na zewnętrzne czujniki
WAIT
Akademia Górniczo-Hutnicza
Wydział Inżynierii Mechanicznej i Robotyki
Języki Programowania Robotów
8
Komenda ta oznacza oczekiwanie programu na spełnienie
warunku
Składnia:
WAIT wyrażenie
Gdzie wyrażenie – funkcje przy której
spełnieniu program ruszy dalej
Przykład:
WAIT SIG(1032, -1045)
–oczekiwanie aż na wejściu 1032 będzie
jedynka a na wejściu 1045 zero
WAIT TIMER(1) > 10
-oczekiwanie aż timer 1 osiągnie wartość
większą od 1
WAIT.EVENT
Akademia Górniczo-Hutnicza
Wydział Inżynierii Mechanicznej i Robotyki
Języki Programowania Robotów
9
Komenda ta wykonuje oczekiwanie programu
Przykład:
WAIT.EVENT , 3.7
–oczekiwanie na zdarzenie przez 3.7 sekundy
program rusza dalej gdy minie czas lub
nastąpi zdarzenie
SET.EVENT
-zawiesza działanie programu aż do czasu
nastąpienia zdarzenia zdefiniowanego
poleceniem SET.EVENT
REACT, REACTI
Akademia Górniczo-Hutnicza
Wydział Inżynierii Mechanicznej i Robotyki
Języki Programowania Robotów
10
Polecenia te służą monitorowaniu danego kanału w trakcie
wykonywania programu i ewentualnemu jego przerwaniu po
wystąpieniu sygnału przy czym polecenie REACT powoduje
przerwanie po wykonaniu danej komendy a REACTI natychmiastowo
zatrzymuje roboto i rozpoczyna skok
Składnia:
REACT signal_number, program, priority
signal_number – sygnał zprzedziału od
1001 do 1012
lub od 2001 do 2008.
program - miejsce docelowe skoku
priority – priorytet nastawiany od 1 do 127
Przykład
Akademia Górniczo-Hutnicza
Wydział Inżynierii Mechanicznej i Robotyki
Języki Programowania Robotów
11
40 REACT -1001, alarm, 10
-zdefiniowanie przerwania
41
42 ; REACT
-uruchomienie oczekiwania na przerwanie
43
44 MOVE a
45 MOVE b
50 MOVE e
51
52
53
54 IGNORE -1001
-wyłączenie oczekiwania na przerwanie
55 .
REACTE
Akademia Górniczo-Hutnicza
Wydział Inżynierii Mechanicznej i Robotyki
Języki Programowania Robotów
12
Wykonuje przerwanie w chwili nastąpienia błędu np. systemu lub
robota
Składnia:
REACTE trouble
trouble
–nazwa błędu
HALT STOP PAUSE
Akademia Górniczo-Hutnicza
Wydział Inżynierii Mechanicznej i Robotyki
Języki Programowania Robotów
13
¾
Polecenie
Halt
powoduje zakończenie aktualnie wykonywanego
programu bez możliwości powrotu
¾
Polecenie
stop
służy do zakończenia aktualnie wykonywanej pętli i
rozpoczęcia podprogramu od początku lub użyte bezpośrednio w
głównej części programu powoduje jego zakończenie działa jak halt
¾
Pause
polecenie to również zamyka podprogram lecz nie kasuje
zmiennych systemowych użytych w tym podprogramie co może być
wykorzystane przy jego poprawianiu
BREAKE BRAKE DELAY
Akademia Górniczo-Hutnicza
Wydział Inżynierii Mechanicznej i Robotyki
Języki Programowania Robotów
14
¾
Polecenie
BREAKE
powoduje zatrzymanie się programu do czasu
wykonania kolejnej następującej pod nim lini
¾
Polecenie
BRAKE
zatrzymuje ruch robota bez względu na
położenie w którym się on znajduje
¾
DELAY
polecenie zatrzymuje ruch robota na pewien okres czasu
np. zamknięcia chwytaka
KANAŁY CYFROWE WE-WY
Akademia Górniczo-Hutnicza
Wydział Inżynierii Mechanicznej i Robotyki
Języki Programowania Robotów
SIGNAl; SIG; SIG.INS
SIGNAL
Instrukcja włączająca/wyłączająca zewnętrzne
cyfrowe kanały wyjściowe i wewnętrzne sygnały
programowe.
Składnia:
SIGNAL nr_sygnalu, ..., nr_sygnalu
nr_sygnalu – cyfrowe wyjścia 1-8 i 33-512 i
wewnętrzne sygnału programowe 2001-2512;
Przykład:
SIGNAL –reset, 4;
Wyłączenie sygnału przypisanego do zmiennej
reset i włączenie sygnału na cyfrowym wyjściu 4
SIGNAL –1, 4, 2010;
Wyłączenie sygnału na cyfrowym wyjściu 1,
włączenie na 4 i włączenie programowego sygnału
2010
SIG.INS
Funkcja sprawdzająca czy dane zewnętrzne
cyfrowe złącze WE/WY jest podłączone lub czy
dane złącze programowe jest dostępne dla
systemu. Dla gotowego (dostępnego) kanału
cyfrowego WE/WY zwraca TRUE (-1) a dla nie
wykrytego FALSE (0.0)
Składnia:
SIG.INS (nr_sygnalu)
nr_sygnalu – dowolny nr sygnału, bez znaczenia
na jego znak.
przykład
in.sig
= 1012
IF NOT SIG.INS(in.sig) THEN
TYPE "Cyfrowe WE/WY nr ", in.sig,
"nie jest
zainstalowane"
END
SIG
Funkcja sprawdza w jakim stanie (wysokim/niskim)
są podane WE/WY.
Funkcja zwraca TRUE (-1) gdy wszystkie
sprawdzane WE/WY są w stanie zgodnym z
zapisanym w argumentach, bez znaku dla
włączonego i z „-„ dla wyłączonego, natomiast
zwraca FALSE (0.0) gdy którykolwiek z portów jest
w innym stanie niż zapisany.
Składnia:
SIG (nr_sygnalu, ..., nr_sygnalu)
nr_sygnalu – nr sprawdzanego WE/WY
1-8 i 33-512 dla cyfrowych WY,
1001-1012 i 1033 -1512 dla cyfrowych WE,
2001-2512 dla programowych WE/WY.
Przykład
Załóżmy że:
WE 1001 jest Włączone
WE 1004 jest Wyłączone
SIG(1001) ; Zwraca –1.0 (TRUE)
SIG(1004) ; Zwraca 0.0 (FALSE)
SIG(–1004) ; Zwraca –1.0 (TRUE)
SIG(1001,1004) ; Zwraca 0.0 (FALSE)
SIG(1001,–1004) ; Zwraca –1.0 (TRUE)
IOSTAT
Zapewnia informacje o stanie ostatniej
operacji I/O. Funkcja zwraca 1 gdy
wykonana operacja zakończyła się
pomyślnie, 0 gdy jeszcze nie skończyła się i
wartości < 0 dla standartowych błędów V+
Składnia:
IOSTAT (lun, mode)
lun – numer urządzenia, które chcemy
sprawdzić
mode – opcjonalny parametr trybu
zwracanych informacji, standartowo 0
Przykład:
Dyski różnią się od wszystkich innych
urządzeń tym, że pozwalają na otwieranie
plików. Każdy program może mieć otwarty
jednocześnie wiele plików na tym samym
bądź na różnych dyskach. Język V/V+
posiada obsługę błędów dzięki czemu może
kontynuować pracę mimo wystąpienia
błędów I/O. Sukces bądź nieudane
wykonanie operacji zapisywane jest w
funkcji IOSTAT.
Na przykład wywołanie funkcji IOSTAT(5)
zwróci nam wartość ostatniej operacji IO.
Wartości:
1 – operacja zakończona sukcesem
0 – operacja jeszcze się nie zakończyła
<0 – wystąpił błąd - numer błędu definiuje
nam jakiego typu błąd wystąpił
Wartości logiczne
Akademia Górniczo-Hutnicza
Wydział Inżynierii Mechanicznej i Robotyki
Łukasz Ziomka
Paweł Orisz
Języki Programowania Robotów
27
W języku V/V+ wyrażenie logiczne może mieć wartość true albo false.
Gdy dane wyrażenie logiczne jest prawdziwe przyjmuje ono wartość
true, a zapisie liczbowym wartość –1.
Gdy dane wyrażenie logiczne jest fałszywe przyjmuje ono wartość
false, a w zapisie liczbowym wartość 0.
W przypadku, gdy istnieje potrzeba określenia wartości logicznej
wyrażenia o wartości innej niż 0 lub –1, to:
- wyrażenie przyjmie wartość logiczną 0, gdy jego wartość liczbowa
jest równa 0
- wyrażenie przyjmie wartość logiczną –1, gdy jego wartość liczbowa
jest różna od 0
Operatory porównania
Akademia Górniczo-Hutnicza
Wydział Inżynierii Mechanicznej i Robotyki
Języki Programowania Robotów
28
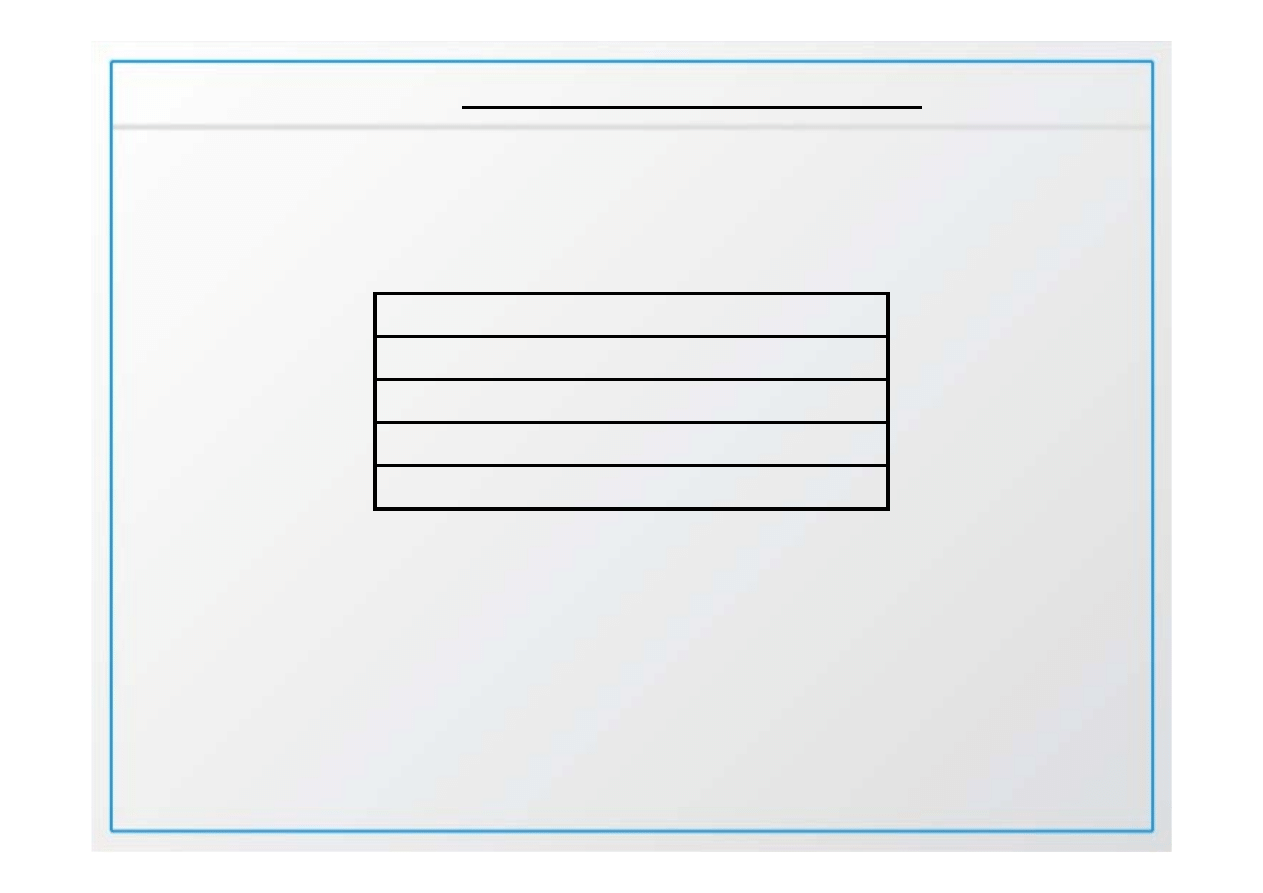
OPIS
SYMBOL
różny
<>
równy
==
mniejszy niż...
<
większy niż...
>
mniejszy lub równy
<= lub =<
większy lub równy
>= lub =>
Operatory logiczne
Akademia Górniczo-Hutnicza
Wydział Inżynierii Mechanicznej i Robotyki
Języki Programowania Robotów
29
OPIS
SYMBOL
negacja
NOT
koniunkcja
AND
alternatywa
OR
różnica symetryczna
XOR
Bitowe operatory logiczne
Akademia Górniczo-Hutnicza
Wydział Inżynierii Mechanicznej i Robotyki
Języki Programowania Robotów
30
OPIS
SYMBOL
koniunkcja bitowa
BAND
alternatywa bitowa
BOR
bitowa różnica symetryczna
BXOR
negacja bitowa
COM
Priorytet operatorów
(logicznych i arytmetycznych)
Akademia Górniczo-Hutnicza
Wydział Inżynierii Mechanicznej i Robotyki
Języki Programowania Robotów
31
NOT, COM
- (minus jednoargumentowy)
*, /, MOD, AND, BAND
+, -, OR, BOR, XOR, BXOR
==, <= (=<), >= (=>), <, >, <>
Operatory w tym samym wierszu posiadają jednakowy priorytet.
Operatory z wiersza położonego wyżej niż dany wiersz posiadają wyższy priorytet.
W przypadku niejasności co do kolejności wartościowania wyrażenia należy
stosować nawiasy ().
Przykłady wyrażeń logicznych
Akademia Górniczo-Hutnicza
Wydział Inżynierii Mechanicznej i Robotyki
Języki Programowania Robotów
32
Y > 34
NOT (Y >= 17)
X == 12
X AND Y
(X AND Y) OR (var01 >= var02)
Warunkowe instrukcje sterujące
Akademia Górniczo-Hutnicza
Wydział Inżynierii Mechanicznej i Robotyki
Języki Programowania Robotów
33
IF wyrażenie GOTO etykieta
________________________________
IF wyrażenie THEN
instrukcje
END
________________________________
IF wyrażenie THEN
instrukcje_1
ELSE
instrukcje_2
END
Warunkowe instrukcje sterujące
Akademia Górniczo-Hutnicza
Wydział Inżynierii Mechanicznej i Robotyki
Języki Programowania Robotów
34
CASE wartość_wejściowa OF
VALUE val01,val02,...,val0n:
instrukcje_0
VALUE val11,val12,...,val1m:
instrukcje_1
...
VALUE valx1,valx2,...,valxy:
instrukcje_x
ANY
instrukcje
END
Instrukcja CASE przyjmuje jako wartość wejściową
wartość_wejściowa
(liczba rzeczywista lub całkowita) i
w kolejnych blokach VALUE sprawdzany jest warunek:
wartość_wejściowa == valpq
Jeżeli warunek jest spełniony dla jakiejkolwiek wartości
valpq
znajdującej się w danym bloku VALUE to
wykonywane są instrukcje (
instrukcje_p
), aż do
napotkania kolejnego bloku VALUE, ANY lub do końca
struktury CASE zakończonej instrukcją END.
wartość_wejściowa
jest testowana w każdym bloku
VALUE!!!
W przypadku, gdy wyrażenie
wartość_wejściowa == valpq
nie przyjęło w żadnym bloku VALUE wartości logicznej
true, wykonywane są instrukcje
instrukcje
znajdujące
się po słowie ANY, aż do końca struktury CASE
zakończonej instrukcją END.
Pętla FOR
Akademia Górniczo-Hutnicza
Wydział Inżynierii Mechanicznej i Robotyki
Języki Programowania Robotów
35
FOR licznik = val_start TO val_stop [STEP krok]
instrukcje
END
[ ] – oznacza, że instrukcja nie jest wymagana
Na początku pętli, zmiennej
licznik
zostaje przypisana wartość
val_start
. Zmienna
val_stop
określa
maksymalną (minimalną, gdy występuje zmniejszanie licznika w każdej iteracji) wartość licznika,
dla której pętla FOR będzie wykonana.
Ostatnia iteracja nastąpi wtedy, gdy zmienna
licznik
osiągnie wartość
val_stop
(jest to pętla z
warunkiem wejścia).
Domyślnie wartość
krok
(czyli o ile zmieniana jest wartość zmiennej
licznik
po wykonaniu iteracji)
wynosi 1. Wówczas nie ma potrzeby stosowania wyrażenia
STEP 1
Wartość zmiennej
krok
może być liczba dodatnią lub ujemną, całkowitą lub rzeczywistą.
Pętla WHILE ... DO
Akademia Górniczo-Hutnicza
Wydział Inżynierii Mechanicznej i Robotyki
Języki Programowania Robotów
36
WHILE wyrażenie DO
instrukcje
END
Jest to pętla z warunkiem wejścia.
Pętla jest wykonywana w przypadku, gdy wartość logiczna wyrażenia
wyrażenie
wynosi true. W
innym przypadku program przechodzi do następnej instrukcji po słowie END.
Pętla DO ... UNTIL
Akademia Górniczo-Hutnicza
Wydział Inżynierii Mechanicznej i Robotyki
Języki Programowania Robotów
37
DO
instrukcje
UNTIL wyrażenie
Jest to pętla z warunkiem wyjścia, czyli wykonywana jest przynajmniej jeden raz.
Następna iteracja jest wykonywana tylko w przypadku, gdy wartość logiczna wyrażenia
wyrażenie
wynosi true. W innym wypadku pętla zostaje przerwana i zostanie wykonana pierwsza instrukcja
znajdująca się za pętlą.
Instrukcje: EXIT oraz NEXT
Akademia Górniczo-Hutnicza
Wydział Inżynierii Mechanicznej i Robotyki
Języki Programowania Robotów
38
Instrukcje te mają zastosowane we wszystkich trzech pętlach.
EXIT
Jeżeli wewnątrz pętli zostanie wykonana instrukcja EXIT, to następuje natychmiastowe przerwanie
iteracji i pętli. Następnie wykonywana jest pierwsza instrukcja znajdująca się po bloku pętli.
NEXT
Jeżeli wewnątrz pętli zostanie wykonana instrukcja NEXT, wówczas następuje przerwanie
bieżącej iteracji i przejście do kolejnej iteracji. Czy zostanie wykonana iteracja zależy od rodzaju
pętli. W przypadku pętli:
¾
FOR będzie sprawdzana wartość licznika.
¾
WHILE ... DO będzie sprawdzana wartość wyrażenia warunkowego.
¾
DO ... UNTIL przed przejściem do kolejnej iteracji będzie sprawdzona wartość logiczna
wyrażenia po instrukcji UNTIL.
Wyszukiwarka
Podobne podstrony:
Podstawy programowania 1 W2 id Nieznany
narodowy program zdrowia 2 id 3 Nieznany
cw 2 programowanie procesu id 1 Nieznany
Program socjoterapeutyczny id 3 Nieznany
programowanie niskopoziomowe id Nieznany
MOO programowanie kwadratowe id Nieznany
podstawy programowania java id Nieznany
FANUC podstawy programowania id Nieznany
Program umiarkowany id 395519 Nieznany
Narodowy Program Zdrowia1 id 31 Nieznany
program praktyk informatyka id Nieznany
Narodowy Program Zdrowia id 314 Nieznany
Program cw3 id 395618 Nieznany
Programowanie GUI id 395885 Nieznany
Program zjazdu id 395614 Nieznany
Program cw2 id 395617 Nieznany
więcej podobnych podstron