Podstawy Technologii Satelitarnych Systemów Lokalizacyjnych GPS,
GLONASS
http://www.navi.pl/?mright=gps_artykuly_&mitem=podstawy
Autorzy
Piotr
NAVI
sp.
z
o.o.
Mariusz Figurski, Politechnika Warszawska
Grzegorz
NAVI sp. z o.o.
Zofia
Rzepecka,
ART
Olsztyn
Anna Tyranowska, CBK PAN
© 1998, NAVI sp. z o.o., Wszystkie prawa
WPROWADZENIE.
1.1 GPS i GLONASS
wieloma,
systemami
lub
maszynie
swoje
na powierzchni Ziemi i w
przestrzeni
kosmicznej,
GPS i rosyjski GLONASS
globalnym
i
GPS - Globalny System Lokalizacyjny i GLONASS - Globalny System Nawigacyjny
systemami satelitarnymi przeznaczonymi do szybkiego i
wyznaczania
anteny odbiornika w globalnym systemie
odniesienia.
odbierane
przez powszechnie
odbiorniki w
dowolnym momencie, bez ponoszenia
Warunki atmosferyczne
nie
na funkcjonowanie
i
wyznaczonej
pozycji. Liczba
jest nieograniczona. Odbiorniki
zazwyczaj z
miniaturowych anten
o charakterystyce
jednoczesny odbiór z
obszaru sfery niebieskiej.
pomiar musimy
sfery niebieskiej z punktu obserwacji. Przeszkody terenowe - drzewa,
budynki i konstrukcje
na drodze
mu dotarcie w
linii prostej do odbiornika. Jest to jedyne
w praktyce ograniczenie
korzystania z systemów.
Oba systemy
utworzone i
przez wojskowych. Oba
rozproszonego widma. Oba
poziomy
- Standardowy i Precyzyjny Serwis Pozycyjny, przeznaczone odpowiednio
dla
cywilnych i militarnych. W przypadku GPS
Standardowego Serwisu Pozycyjnego jest ograniczona poprzez intencjonalne
pogorszenie
o ile liczba
cywilnych odbiorników GPS
w milionach, odbiorniki systemu GLONASS nie
jeszcze powszechnie
stosowane. Systemowi temu daleko jeszcze do
i
daje

GPS. W
czasie, z uwagi na
GLONASS
przez umieszczane obecnie na orbicie satelity systemów IRIDIUM i GLOBSTAR,
pasma
przez ten
system.
mocarstw wobec cywilnych
systemów
dyrektywa Prezydenta Stanów Zjednoczonych z 26 marca 1996 roku oraz dekret
Premiera
Rosyjskiego
z
7
marca
1995
roku.
Dokument
deklaruje
kontynuacji Standardowego Serwisu
Pozycyjnego dla potrzeb pokojowych, cywilnych, naukowych i komercyjnych w
sposób
w skali
globu i bez pobierania
Zapowiada
w
od intencjonalnego pogarszania
Dokument rosyjski deklaruje zamiar
uruchomienia globalnego systemu
nawigacyjnego GLONASS dla potrzeb wojskowych i cywilnych
krajowych oraz cywilnych
zagranicznych. Zapowiada
zamiar
zawarcia
w ramach ICAO - International Civil Aviation Organization oraz
IMO - International Maritime Organization,
systemu
GLONASS jako elementu
globalnego systemu nawigacyjnego
dla
cywilnych.
1.2 Konstelacje satelitarne.
Segment kosmiczny GPS
z 24 satelitów, w tym 3 aktywnych satelitów
zapasowych. W praktyce,
satelitów przekracza zazwyczaj
Satelity rozmieszczone na
orbitach
po cztery na
na
20200 km.
orbit nachylone pod
55 stopni do
równika. Czas obiegu orbity jest równy
doby gwiazdowej. Obserwator na
Ziemi zaobserwuje
satelitów codziennie, o prawie tej samej
porze.
dnia powtarza
ona o cztery minuty
z powodu
doby
i gwiazdowej. Satelity rozmieszczone tak,
co najmniej 5 z nich powinno
widocznych z
punktu Ziemi z
0.9996. Taka konfiguracja
z
wyznaczenie
dowolnego miejsca na powierzchni Ziemi w dowolnym
momencie doby. Na nielicznych i niewielkich obszarach wyznaczenie pozycji
trójwymiarowej jest
w okresie nie
20 minut w
doby.
konstelacja satelitów GLONASS
24 obiektów rozmieszczonych na
trzech
orbitalnych o inklinacji 64.8 stopnia. Po skompletowaniu, na
1996 roku,
zestaw satelitów
przez okres
40 dni.
Pod koniec roku 1996 na orbicie
21 aktywnych obiektów. Na
powinno
8 równomiernie rozmieszczonych satelitów.
Orbity
i
na
19100 km. Okres obiegu wynosi
11h15m.
inaczej
w przypadku GPS, ruch satelitów nie jest
synchroniczny z okresem obrotu Ziemi,
manewrów orbitalnych
do

utrzymania
konfiguracji jest mniejsza. Przy takim okresie obiegu widok
konstelacji z
punktu na powierzchni Ziemi powtarza
co 5 dni. Co
najmniej 5 satelitów powinno
widocznych w
momencie doby, z
punktu na powierzchni Ziemi, w konfiguracji
wyznaczenie
pozycji.
1.3 Proces wyznaczania pozycji.
z satelitów
jest w
atomowych wzorców
czasu. Jej
jest
Parametry
satelitarnych skal czasu i parametry orbit satelitarnych wyznaczane
przez
Naziemne Centra
Informacje te
na
satelitów celem
dalszej retransmisji do
systemu. Najnowsza generacja satelitów GPS -
blok IIR, zaprojektowana
tak, by
funkcji stacji
naziemnych. Przewiduje
w
konstelacja satelitów GPS
autonomicznie przez okres kilku
bez istotnego
pogorszenia
serwisu.
Struktura
satelitarnego
odbiornikowi wyznaczenie czasu jaki
od momentu
do momentu odbioru i
w ten
sposób
a
Dane nawigacyjne
odbiornikowi do
satelity w momencie nadawania
do satelitów i ich
danymi do
wyznaczenia
odbiornika. Dla trójwymiarowego
odbiornika potrzebne
dane z czterech satelitów,
oprócz trzech
zegara odbiornika.
1.4
o rozproszonym widmie.
Widmo
nawigacyjnych GPS i GLONASS jest rozproszone na wskutek
dodatkowej modulacji
informacyjnego sekwencjami pseudolosowymi. Taka
struktura
uzyskanie
i
wyniku pomiaru
Poziom mocy
odbieranego jest wielokrotnie
od poziomu szumów
odbiornika.
odebrany jedynie przez
sekwencji pseudolosowej.
odebranego
przez lokalnie
istotnie
poziom mocy
i
poziom mocy
Ta zaleta technologii rozproszonego
widma nie ujawnia
w
we
powszechnie
odbiornikach GPS i GLONASS.
nawet te o
niewielkim poziomie mocy,
ogromnym
wzmocnieniem tor radiowy, zanim
do
stopni odbiornika
przez sekwencje
technologii rozproszonego widma jest
pracy wielu
nadajników w tym samym
z nadajników
wtedy
innej sekwencji pseudolosowej. System GPS wykorzystuje
w
W
systemie GLONASS korzysta
z jednej sekwencji pseudolosowej, a
z
satelitów nadaje swoje
w
kanale. Odbiornik tego systemu musi
bardziej
radiowy tor odbiorczy.
2. STRUKTURA GPS
W
GPS
trzy
segmenty:
•
kosmiczny,
•
nadzoru,
•
System ma charakter pasywny, transmisja
odbywa
jednokierunkowo, z
satelitów do
2.1 Segment kosmiczny
Segment kosmiczny GPS obejmuje
w
2.2 Segment nadzoru
Segment nadzoru
z
Stacji Nadzoru (MCS - Master Control
Station) w Bazie Powietrznych Falcon w Colorado Springs i stacji
na Hawajach, w Kwajalein, Diego Garcia i Ascesion. Wszystkie stacje
w anteny do
dwustronnej z satelitami. Stacje
biernie
wszystkie widoczne satelity. Dane ze stacji
do MCS gdzie wyznaczane efemerydy satelitów i parametry ich zegarów. MCS
okresowo
satelitom efemerydy i poprawki zegara w celu ich retransmisji w
depeszy nawigacyjnej.
2.3 Segment
Segment
z
wojskowych i cywilnych
odbiorników GPS zaprojektowanych tak, by
i
GPS.
to odbiorniki samodzielnie
lub wbudowane w inne
systemy. Zastosowania
wyznaczanie pozycji, transfer czasu, pomiary geodezyjne i wiele innych. Ze
na wielorakie zastosowania odbiorniki
funkcjami i
Burzliwy
rozwój techniki GPS
rozwojowi mikroelektroniki i elektronicznej
techniki obliczeniowej. Na
lat
odbiorcze
Globalnego Systemu Pozycyjnego
kilogramów,
kilkuset litrów.
w momencie, gdy
w
wytwarzaniu
scalonych
wykorzystanie cyfrowych technik
przetwarzania
We
odbiornikach
analogowe
wykorzystywane jedynie w celu wzmocnienia
Dla potrzeb cyfrowego
przetwarzania
wykorzystuje
specjalizowane
z
do
MHz.
tych
procesory o bardzo
przetwarzania danych.
jest
implementowanie w odbiornikach GPS oprogramowania wielozadaniowego
w czasie rzeczywistym.
odbywa
z
1 kHz.
najmniejsze i najprostsze odbiorniki,
przeznaczone dla potrzeb nawigacyjnych
nie
kilkaset gram i
trzymane w
3. POZIOMY
GPS
GPS zapewnia dwa poziomy
Serwis Pozycyjny (PPS -
Precise Positioning Service) oraz Standardowy Serwis Pozycyjny (SPS - Standard
Positioning Service). PPS zapewnia dane o pozycji i czasie o wysokiej
tylko dla autoryzowanych
SPS jest mniej
lecz
dla wszystkich
3.1
serwis pozycyjny - PPS
PPS dostarcza informacji o pozycji z
nie
16 metrów
(50%,3D) i informacji o czasie z
nie
100 nanosekund (1
sigma) w stosunku do czasu UTC(USNO) (Universal Coordinated Time US Naval
Observatory. PPS
jest jedynie dla autoryzowanych
i
przeznaczony
dla celów wojskowych. Do autoryzowanych
Zbrojne USA i NATO. O autoryzacji
decyduje Departament
Obrony USA.
do PPS kontrolowany jest dwiema metodami:
•
Ograniczony
(SA - Selective Availability) pozwala na zmniejszenie
pozycji i czasu
dla nieautoryzowanych
SA
poprzez wprowadzanie kontrolowanych
do
satelity i depeszy
satelitarnej. Departament Obrony
w czasie pokoju SA zmniejszy
pozycji dla
SPS do 100 metrów (95%, 2D).
•
Anti-spoofing (A-S) jest
bez
by
imitowanie
PPS przez nieprzyjaciela. Technika ta zmienia kod P,
go, w kod
oznaczony jako kod Y. Nie ma to
na odbiór kodu C/A. Klucz do szyfru
jest
autoryzowanym
im
SA i A-S. W ten sposób
oni
Odbiorniki PPS
kodu P(Y), kodu C/A lub obydwu.
uzyskiwana jest przy
kodu P(Y)
o
L1 i
L2.
w czasie propagacji
o
jest
do wyznaczenia poprawki jonosferycznej. Zazwyczaj odbiorniki PPS
kodu
C/A w celu inicjacji
satelitów i wyznaczenia
fazy
kodu P(Y).
3.2 Standardowy serwis pozycyjny - SPS
Standardowy serwis pozycyjny dostarcza informacji o pozycji z
nie
100 metrów (95%,2D) w
dwuwymiarowych i 156 metrów
(95%,3D) w
trójwymiarowych.
informacji o czasie
jest na nie
niz. 337 nanosekund (95%) w stosunku do skali

UTC(USNO). SPS przeznaczony jest
dla
cywilnych.
Wymieniona
zawiera
SA, który jest
SPS.
wyznaczenia pozycji przypomina
normalny z
zeru.
A-S
SPS
do kodu Y. Tak
SPS
nie
na
pomiarze kodu P, by
w propagacji
L1 i L2, a zatem
poprawki
jonosferycznej - kod C/A nadawany jest tylko na
L1. Typowy odbiornik
SPS do wyznaczenia poprawek jonosferycznych
modelu jonosfery
transmitowanego w depeszy satelitarnej, jest to procedura znacznie mniej
pomiar na dwóch
pozycji przy
SPS podana
na
tego punktu
modelowania jonosfery. Odbiorniki
geodezyjne
rozmaitych wyrafinowanych metod do
czasów propagacji, bez jawnej
transformacji kodu P do Y.
Sztucznie wprowadzone i niektóre naturalne ograniczenia
w
stopniu wyeliminowane przy
technik
Techniki te
na wykorzystaniu poprawek wyznaczanych przez precyzyjnie zlokalizowane
odbiorniki, zwane stacjami referencyjnymi. Poprawki
wprowadzane po pomiarze, lub w czasie rzeczywistym, w tym ostatnim wypadku do
ich transmisji wykorzystuje
radiowe. W
czasie przewiduje
upowszechnienie systemów dystrybucji poprawek
z
satelitów
komunikacyjnych.
4. CHARAKTERYSTYKA TECHNOLOGII GPS
od stosowanej techniki przetwarzania
i danych, rezultaty pomiarów
wykonywanych z wykorzystaniem
satelitów GPS
i
z kategorii cywilnych
GPS
wymieniono
4.1 Nawigacja w czasie rzeczywistym
Wyznaczanie w czasie rzeczywistym pozycji obiektów
morskich,
lotniczych, kosmicznych. Czas trwania pomiaru jest bardzo krótki, zazwyczaj nie
przekracza sekundy, typowa
jest
metrów, przy
wykorzystaniu technik
submetrowe. Uzyskane
informacje wykorzystywane
innymi dla potrzeb nawigacyjnych, w
systemach nadzoru ruchu obiektów.
4.2 Systemy informacji geograficznej.
Tworzenie baz informacji geograficznej, szybkie pomiary kartograficzne. Odbiorniki,
w odpowiednie oprogramowanie
informacji o
terenie skojarzonej z
Opracowanie informacji z odbiornika GPS ma
miejsce zazwyczaj po sesji pomiarowej, z wykorzystaniem danych zarejestrowanych
przez odbiornik i
Pojedynczy pomiar trwa od kilku do

sekund, uzyskiwana
wyznaczenia pozycji jest
metra
lub lepsza.
4.3 Pomiary geodezyjne Static, Fast Static
Dla potrzeb geodezyjnych wyznacza
wektory o
do kilkuset
kilometrów, przy
pomiaru
wektora
kilku milimetrów.
Pomiar taki wykonuje
przy
pary odbiorników, czas wykonania pomiaru
wynosi,
od
odbiornikami i warunków
satelitów, do
minut. Pomiary wykonywane
GPS
dla pomiarów geodezyjnych wykonywanych metodami
tradycyjnymi a przy tworzeniu sieci
ze
na
i niskie koszty.
4.4 Pomiary geodezyjne Kinematic, Stop&Go
W pomiarach tego typu wykorzystuje
fakt, przemieszczenia anteny odbiornika
GPS, nie
kontaktu z
satelitarnymi
natychmiast
wyznaczone z
pomiar od punktu o znanych
pozycje kolejnych punktów z
z czasem pobytu na punkcie
sekund.
dla
przy wyborze odpowiedniego typu
jest sposób inicjalizacji pomiarów kinematycznych. Odbiorniki dwu-
inicjalizowane w locie (On-The-Fly), w praktyce oznacza
to, odbiornik
i
w trybie kinematycznym bez
potrzeby umieszczania anteny na punkcie o znanych
Dla inicjalizacji
odbiornika jedno-
jest umieszczenie anteny na
punkcie o znanych
W braku takiego punktu
jest
wykonanie pomiaru
Static lub Fast Static.
odbiornikami jedno i dwu-
jaskrawsze przy pomiarach wykonywanych na
i
odbiornika jedno-
wzrasta szybciej wraz ze wzrostem
od bazy
odbiornika dwu-
4.5 Real Time Kinematic
Jest to najbardziej zaawansowana technologia
Wymaga
radiowego
o
jednak
wyznaczanie pozycji w czasie rzeczywistym z
Jej
ograniczony jest do promienia kilkunastu
kilometrów od stacji bazowej.
4.6 Transfer czasu i
wzorcowej
Typowy odbiornik systemu GPS przeznaczony do dystrybucji czasu podaje aktualny
czas UTC(USNO) i emituje skojarzony impuls sekundowy, o
ze
UTC
lepszej od 0.5 mikrosekundy. Technika
"common view",
porównywanie zegarów z
do kilku nanosekund.

wykorzystuje
odbiorniki GPS do sterowania
dyscyplinowanego wzorca
Uzyskuje
10-12.
4.7 Wyznaczanie orientacji
Odbiornik GPS
z kilku anten
obiektu, np. przechylenia boczne i
samolotu.
4.8 Inne technologie
nie wyczerpuje wszystkich
cywilnego wykorzystania
systemu GPS.
specyficzne warunki wykonania pomiaru
uzyskanie
nietypowych dla danej techniki. Stosunkowo
w
realizacji jest np.
wyznaczanie
budowli, konstrukcji
z
z
kilku lub kilkunastu
Hz.
GPS znajduje obecnie zastosowanie w prawie wszystkich
gospodarki ze
szczególnym znaczeniem w: transporcie, telekomunikacji, energetyce, budownictwie,
gospodarce przestrzennej.
5.
GPS
emitowany przez satelity GPS ma
fali
kodowanej fazowo
•
informacyjnym, o
50 bitów na
•
pseudolosowym kodem C/A, taktowanym
1,023 MHz,
•
pseudolosowym kodem P, taktowanym
10,23 MHz,
•
pseudolosowym kodem Y, taktowanym
0.5 Hz.
Wszystkie
i fala
tworzone w oparciu o ten sam
wzorcowej.
fal
oznaczanych symbolami L1 i L2
odpowiednio 1575,42 i 1227,60 MHz.
nadawany na
L2 nie jest modulowany kodem C/A. Kod Y jest nadawany przy
systemie
zapobiegania intencjonalnym próbom
pracy
GPS,
terminem " Anti-spoofing".
z kodem C/A
z
kodami P i Y.
satelitarne
o widmie rozproszonym. Poziom mocy
satelitarnego jest o
30 dB
od poziomu szumów wzmacniacza
antenowego.
dwa czynniki
kod C/A (coarse/acquisition-
akwizycji zgrubnej) tylko na L2 oraz kod P (precise-
na L1 i L2. Minimalna
moc
odbieranego przez
odbiornika, gwarantowana w specyfikacji
systemu, wynosi:
•
160 dBW L1 C/A
•
163 dBW L1 P

•
166 dBW L2 P.
Zarówno kod P jak i C/A
odbiornikiem a
na kod P i C/A depesza nawigacyjna zawiera
innymi dane efemerydalne,
o parametrach zegara satelity, model
poprawki jonosferycznej.
5.1 Kod P(Y)
Kod P jest
267 dni,
z satelitów ma przypisany
jednotygodniowy segment tego kodu.
transmisji wynosi 10.23 MHz.
5.2 Kod C/A
Kod C/A
z 1023 bitów transmitowanych z
1.023 MHz,
sekwencja powtarza
co 1
z satelitów przypisany jest
inny kod C/A. Bity kodu nazywane chipami. Sekwencja dobrana jest tak by:
•
kody
satelitów nie
skorelowane
•
dla
satelity
autokorelacji
tylko jedno maksimum.
Cechy te
i
odbiór
nadawanych w tym
samym
5.3 Depesza nawigacyjna
informacyjnego zawiera
innymi:
•
Almanach - dane
aktualnego stanu systemu, w tym
elementy
orbitalne wszystkich satelitów, których
proces akwizycji,
•
-
elementy orbitalne satelity
do
wyznaczania czasu i pozycji.
Depesza nawigacyjna
jest na kod P i kod C/A.
transmisji wynosi
50 bitów na
ona z 25 ramek,
z 1500 bitów.
ramka podzielona jest na 5 podramek, po 300 bitów
Odebranie jednej ramki
danych zajmuje
30 sekund, a odebranie wszystkich 25 ramek zajmuje 12.5
minuty. Podramki 1,2 i 3
te same 900 bitów danych we wszystkich 25
ramkach,
to odbiornikowi odebranie krytycznych danych w
30
sekund. Dane depeszy nawigacyjnej uaktualniane co cztery godziny. Depesza
zawiera
o momencie transmisji Hand Over Word (HOW),
od
kodu C/A do
kodu P(Y), dane efemerydalne i dane
o zegarze oraz almanach (czyli zgrubne parametry ruchu i statusy dla wszystkich
satelitów w konstelacji). Dodatkowo transmitowane dane o "zdrowiu" satelitów,
do modelu
jonosferycznego,
obliczenie czasu UTC.
6.
ODBIORNIKA GPS
By
odbiornik GPS musi
i
satelitarne (by
i przyrosty
oraz
depesze

Rezultaty pomiaru
nazywane
ze
na
je, jednakowy dla wszystkich satelitów
spowodowany
zegara odbiornika.
6.1 Akwizycja
GPS
W procesie inicjacji odbiornika nawigacyjnego SPS wykonywane
innymi
•
przewidywanej konfiguracji satelitów, dopplerowskich
•
ustawienie
generatorów
fazowych,
•
przesuwanie serii pseudolosowych kodu C/A
wybranym satelitom
do momentu uzyskania korelacji z
satelitarnymi,
•
w momencie wykrycia korelacji
automatycznych mechanizmów
fazowych i kodowych,
•
synchronizacja bitowa
•
odbiór efemerydy,
•
wyznaczanie pozycji i poprawki czasu zegara odbiornika,
•
odbiór almanachu.
Dla
przewidywanej konfiguracji satelitów
jest
almanachu,
pozycji,
czasu.
odbiornik nie posiada
tych informacji, wyboru satelitów dokonuje
w sposób dowolny,
generatorów
fazowych wybierane kolejno z
zakresu
dopplerowskich.
Serie losowe przesuwane
z
przez
przewidywany stosunek
do szumu. W najbardziej niekorzystnym przypadku
prawie równa okresowi kodu C/A, w takim wypadku
korelacja zostanie uzyskana dopiero po kilku lub kilkunastu sekundach.
z
momentu korelacji, w takim wypadku przeszukiwanie
Po uzyskaniu synchronizacji kodu i
odbywa proces synchronizacji bitowej.
Wymaga on odbioru
sekwencji bitów,
co 6 sekund. Dla
potwierdzenia stanu synchronizacji bitowej
oczekuje
na kolejne
powtórzenie sekwencji
Okres
informacji efemerydalnej
do wyznaczenia pozycji i poprawki zegara wynosi 18 sekund, powtarza
ona co
sekund.
od momentu
odbiornika do momentu uzyskania
nawigacyjnego nazywamy czasem akwizycji. Wynosi on kilka lub
minut w
przypadku braku informacji
do
aktualnej konfiguracji
satelitów i skraca
do
sekund
te informacje znane. Nie

jednak krótszy od
30 sekund,
odbiór aktualnej efemerydy jest
Poziom
odbieranego przy powierzchni Ziemi jest
od poziomu szumu.
Do wydzielenia
nawigacyjnych odbiornik wykorzystuje
i korelacji. Typowe
na celu
rozpoczyna
od
widzialnych satelitów.
jest na podstawie
podanych przez
i czasu oraz
przechowywanego przez odbiornik almanachu. W sytuacji, gdy nie mamy uprzednio
zachowanego almanachu lub nie dysponujemy
odbiornik w
sposób systematyczny "przeszukuje niebo"
od
jakiegokolwiek satelity.
danego
odbiornik demoduluje
i odczytuje dane almanachu o wszystkich satelitach w konstelacji.
jest do
a
kodu
do
kodów C/A P.
te
by
i
satelity.
6.2
kodu C/A
kodu
jest do pomiarów
W
generowana jest replika kodu C/A satelity. W celu dopasowania odbieranego
i
generowanej repliki
dwie
•
repliki do
odbieranego
•
repliki do fazy odbieranego kodu.
W
zanim zacznie
proces
replika kodu nie
skorelowana z odbieranym kodem z powodu czasu potrzebnego
na
dotarcie do odbiornika i
skal czasu zegarów satelity i odbiornika. Odbiornik
odbieranego kodu C/A by
i w rezultacie
kodu.
6.3
odbiornika generuje
która
od
odbieranej
przede wszystkim z powodu
Dopplera.
Dopplera proporcjonalne jest do
odbiornikiem a
Aby
musi
najpierw
przez
kodu.
zmienia
tak
ona
zgodna z
odbieranej
i uzyskany zostanie stan synchronizacji
fazowej.
6.4 Odbiór danych
Proces odbioru danych rozpoczyna
po uzyskaniu synchronizacji
W
pierwszym etapie odbywa
proces synchronizacji
danych. Po uzyskaniu
synchronizacji bitowej dane
kolekcjonowane przez odbiornik. Wyrafinowana

metoda kontroli
informacji zapobiega
wykorzystania
danych.
6.5 Nawigacja
Odbiornik po odebraniu
czterech satelitów,
synchronizacji
kodowej i fazowej, odczytaniu depeszy nawigacyjnej jest gotów do
nawigacji. Zazwyczaj odbiorniki
dane o
i
raz na
Celem nawigacji jest obliczenie pozycji i
odbiornika oraz czasu w skali GPS. Czas jaki
momentem
i odebrania
jest wprost proporcjonalny do
a
odbiornikiem, jest
aby zarówno satelita jak i odbiornik
tego
samego czasu jako odniesienia. Odbiornik
zrekonstruowanej skali czasu GPS
do pomiaru momentu odbioru danych z satelity. W odbiorniku nie musi
wysokostabilny wzorzec jak na
wzorzec atomowy,
na
satelitach. Zamiast tego w odbiorniku znajduje
oscylator kwarcowy. Brak
skali czasu generowanej przez ten oscylator ze
GPS jest
korygowany w oparciu o rezultat pomiaru czterech
Odbiornik GPS
czterech
by
czterech
z czterema
niewiadomymi: trzema
odbiornika i
skali czasu odbiornika.
obliczana jest podobnie, lecz z
zamiast
Ostateczne
nawigacyjne jest zazwyczaj uzyskiwane
po wprowadzeniu rezultatów pomiaru do filtru Kalmana.
7.
OCENA
NAWIGACYJNEGO
Parametrami
przy charakteryzowaniu
pozycji wyznaczonej przez
odbiornik
•
SEP (Spherical Error Probable) - 50% pozycji wyznaczanych trójwymiarowo znajduje
w sferze o promieniu SEP,
•
CEP (Circular Error Probable) - 50% pozycji wyznaczanych dwuwymiarowo znajduje
o promieniu CEP.
Ocena przewidywanej
dokonywana jest zazwyczaj poprzez
•
UERE - estymowane odchylenie standardowe pomiaru
satelita-odbiornik,
parametr ten jest transmitowany przez
•
DOP -
pomiaru
do satelity z
wyznaczenia pozycji,
DOP
konfiguracji geometrycznej
satelity-odbiornik.
z segmentem kosmicznym i segmentem nadzoru poza
Wszystkie
traktuje
zazwyczaj jako losowe i
normalny.
DOP

•
GDOP - Geometrical Dilution of Precision, geometryczne rozmycie
ten jest odwrotnie proporcjonalny do
której
pozycje obserwowanych satelitów i odbiornika,
•
PDOP - Position Dilution of Precision, trójwymiarowe rozmycie
w
pierwszym
PDOP jest nieco mniejsza od GDOP,
•
HDOP - Horizontal Dilution of Precision, poziome rozmycie
•
VDOP - Vertical Dilution of Precision, pionowe rozmycie
•
TDOP - Time Dilution of Precision, rozmycie
czasu.
przewidywanej
odpowiedni
DOP przez UERE. Mniejsze
DOP
lepszym warunkom geometrycznym.
8. PARAMETRY ODBIORNIKÓW NAWIGACYJNYCH
Podstawowy zestaw parametrów odbiornika nawigacyjnego obejmuje:
•
wyznaczania pozycji, w trybie autonomicznym, ze
na S/A, jest
podobna dla wszystkich odbiorników, w trybie
mocno od typu
odbiornika i
stacji bazowej
•
wyznaczania
parametry modelu dynamicznego
•
wyznaczania czasu,
•
satelitów - minimum to cztery satelity, jednak w takiej sytuacji utrata
jednego z nich
satelity za horyzont,
powoduje
przerwanie
nawigacji trójwymiarowej (akwizycja
innego satelity i
powrót do nawigacji trójwymiarowej
do 2 minut),
to
nie
jest stosowane. Praktyczne minimum to 5 satelitów - mamy zawsze w zapasie jednego
Najlepszym
jest
wszystkich widocznych satelitów
(technika All-In-View), praktycznie do 12 satelitów.
•
dopuszczalna dynamika
którym poddany
odbiornik bez
zerwania
przez
i kodu ) -
dynamika
jest w aplikacjach lotniczych, w przypadku aplikacji morskich nie ma ona
znaczenia,
•
czas akwizycji - do pierwszego wyznaczenia pozycji
•
czas reakwizycji - do wznowienia pomiarów po chwilowym zaniku
satelitarnego,
•
odbiornika. Nie ma ona zasadniczego znaczenia dla
odbioru.
Prawie wszystkie konstrukcje
do odbioru
istotniejszym parametrem jest minimalny stosunek
do szumu, przy którym odbiornik
jeszcze
satelitarny. W warunkach ruchu, lub przy pracy pod
kryterium to
zaostrza
O ile problem ten nie
obecnie, w
pewne
z
mocy nadajników satelitarnych.
Moc emitowana przez obecnie
satelity bloku II jest czterokrotnie
od
mocy gwarantowanej w specyfikacji systemu.
z uwagi na
energii, nowe satelity bloku IIR
nadajników
do gwarantowanej, a
stosunek
do szumu gorszy
o
6 dB.
•
na
9.
MIERZONE PRZEZ ODBIORNIK GPS
pomiarowymi uzyskiwanymi z
satelitów GPS
•
o
od czasu propagacji
przez
wyznaczana w
oparciu o pomiary
z
kodem C/A lub P.
Pomiar
przy
z kodem P charakteryzuje
Typowa
pomiaru z
kodu C/A wynosi:
3-30m, z
kodu P: 0.3-3m.
z pomiarem przy
kodu C/A jest
300 metrów, kodu P 30 metrów.
te proste do
odbiorniki
pomiar
w oparciu o
pomiar
fazy fali
•
faza odtworzonej fali
Typowa
tego pomiaru jest
1 mm.
Pomiar fazy charakteryzuje
o
równej
fali
-
19cm. Gdy zastosowane
techniczne nie pozwala na
fali
z uwagi na system "Anti - Spoofing", pomiar
fazy na
L1
1/2
fali i zazwyczaj obarczony jest dodatkowymi
Usuwanie
w
pomiarach fazowych jest
procesem obliczeniowym, o komplikacji
z
odbiornikami.
•
zintegrowana faza odtworzonej fali
Jest to
analogiczna do
mierzona jednak ze znacznie
fali
ogranicza
nieoznaczonych do jednej,
z
fazy w momencie
pomiaru.
10. OGRANICZENIA
ODBIORNIKÓW
SYSTEMU GPS
10.1 Klasyfikacja
i poprawek GPS.
10.1.1
orbit
satelitarnych
(perturbacje
satelitarne):
-
pole
grawitacyjne
Ziemi,
-
opór
atmosfery,
- grawitacyjne
i
oraz innych
niebieskich,
-
promieniowania
-
skorupy
ziemskiej
i
oceaniczne,
-
elektromagnetycznych,
-
efekty
relatywistyczne.
10.1.2
propagacyjne:
-
refrakcja
jonosferyczna
i
troposferyczna,
-
szumy
atmosfery
i
kosmiczne,
-
interferencja
fal
wtórnych,
10.1.3
Aparatura
odbiorcza:
-
wzorców
-
szumy
odbiornika,
-
wariacje
centrum
fazowego
anten
GPS.
10.1.4
i
modeli zjawisk geofizycznych krótko i
-
skorupy
ziemskiej,
-
oceaniczne,
-
atmosferyczne,
-
model
ruchu
kontynentalnych.
10.1.5
Intencjonalne
ograniczenia
i
AS, Anti-Spoofing, system zapobiegania intencjonalnym próbom
pracy systemu,
SA,
Selective
Availability,
system
ograniczania
10.1.6
systematyczne
obserwacji
fazowych:
-
fazy,
-
fazy.
10.2 Równanie obserwacyjne
gdzie:
p
-
zmierzona
d
–
odbiornika
a
dt
–
offset
zegara
satelitarnego
dT
–
offset
zegara
odbiornika
dion
–
jonosferyczne
dtrop
–
troposferyczne
c
–
ep. –
pomiarowy
10.3 Równanie obserwacyjne fazy
gdzie:
-
zmierzona
faza
N
–
pomiaru
fazy
f
–
fali
e
-
pomiaru
fazy
d
–
odbiornika
a
dt
–
offset
zegara
satelitarnego
dT
–
offset
zegara
odbiornika
dion
–
jonosferyczne
dtrop
–
troposferyczne
c
–
ep. –
pomiarowy
10.4 Offset zegara satelitarnego dt
Offset zegara satelitarnego jest spowodowany
wzorców
satelitarnych do czasu GPS. Poprawki zegarów satelitów GPS
wyznaczane przez segment
kontrolny GPS na podstawie opracowania danych
ze stacji
wielomianu
retransmitowane przez satelity GPS do
w depeszy nawigacyjnej. Parametry te
obliczenie
poprawki zegara satelitarnego z
do pojedynczych metrów. Poprawka jest
obliczana
ze
wzoru:
gdzie:
a0,a1,a2
–
wielomianu
transmitowane
w
depeszy
satelitarnej.
t
–
moment
,
na
który
wyznaczamy
t0
–
epoka
poprawki.
W obliczeniach poprawki zegara satelity
efekty relatywistyczne
z ruchu wzorca
w polu grawitacyjnym Ziemi. Orbity satelitów GPS
mimo to zmiany
pola
grawitacyjnego
znaczenie dla wyznaczania poprawki zegara. Efekty relatywistyczne
kilku metrów. Wynikiem ruchu satelity w zmiennym polu
grawitacyjnym jest zmiana
wzorca,
jak i
satelity.
Poprawka
ta
obliczana
jest
ze
wzoru:
gdzie:
F
–
4.442809305
10-10
sec/
e
–
a
–
orbity
E – anomalia ekscentryczna
10.5 Offset zegara odbiornika dT
Offset skali czasu odbiornika dT wynika z braku synchronizacji zegara odbiornika do skali
czasu GPS. Jest on zwykle traktowany jako dodatkowa niewiadoma i w procesie
obliczeniowym prawie
usuwany. Fizyczna realizacja skali czasu odbiornika
charakteryzuje
niekiedy do
milisekund. Niektóre odbiorniki
okresowo
czasu w oparciu o
na
zegara. W przypadku obserwacji synchronicznych, takich
jakie wykonuje
innymi dla potrzeb geodezyjnych,
fizycznej realizacji skali
czasu odbiornika powoduje dodatkowe, nieusuwalne zaszumienie
pomiarowych. W
w
SA, residua podwójnych
kilkunastu centymetrów na
milisekund
fizycznej realizacji zegara.
10.6
troposferyczne.
troposferyczne wynika ze zmian
przy
przez
-
atmosfery
od powierzchni Ziemi do
10 km.
radiowe GPS, tak jak i inne
radiowe o
30 GHz, nie
zjawisku dyspersji przy
przez
co oznacza,
jest
od
fali radiowej. Troposfera powoduje
i dlatego wyznaczona poprawka troposferyczna jest odejmowana od
rejestrowanej
lub
fazy.
Znaczna
90%, jest spowodowana poprzez
fali elektromagnetycznej z suchym powietrzem, podczas gdy
10% przez
z
sucha
oszacowana z
od 2 –
5 % za
odpowiedniego modelu atmosfery.
mokra
troposferycznego
wyznaczana przy pomocy radiometrów mikrofalowych WVR (Water Vapor
Radiometer).
ich praktycznego wykorzystania jest ich wysoka cena oraz
Dlatego zazwyczaj
powodowany przez
atmosfery jest w
praktyce pomijany. Modele
troposferycznego
satelity nad horyzontem, jak
od parametrów
meteorologicznych w miejscu obserwacji -
i
W praktyce
zamiast wyników aktualnych pomiarów meteorologicznych
parametrów
standardowych.
10.7
jonosferyczny.
jonosferycznego jest jednym z
obiektywnych
wyznaczania pozycji.
warunków jonosferycznych, zarówno
dobowa jak i
powoduje, model
jonosferycznego transmitowany
przez
pozwala na
odpowiedniego
co
w 50 procentach.
jonosferycznego
w oparciu o rezultaty
pomiarów wykonywanych
na
L1 i L2. Wymaga to
odbiornika
Efekt jonosferyczny wynika z
jonosfery, górnej warstwy atmosfery
od
50 – 1000 km nad
Ziemi. Zjonizowane gazy w jonosferze,
w wyniku ultrafioletowego promieniowania
i
wiatru
fal elektromagnetycznych. Ta zmiana
jest
przeciwnie
w przypadku troposfery od
fali elektromagnetycznej.
Zjawisko
fali od
jest nazywane
W jonosferze, w przypadku fal elektromagnetycznych o
30 MHz,
fali ulega
podczas gdy faza fali przyspieszeniu.
tego
zjawiska
zmiany rejestrowanej fazy i
Efekty przyspieszenia fazy i

fali
w takim
lecz przeciwny znak.
efektu jonosferycznego jest proporcjonalna do liczby swobodnych elektronów TEC
(ang. Total Electron Content),
w jednostkowym
od
odbiornika do satelity.
z tego
wzorem:
TEC jest
wielu zmiennych czynników: pory dnia,
geograficznego i
zenitalnej satelity. Efekt jonosferyczny przybiera
w strefie równika magnetycznego. Obszar ten nie obejmuje Polski. Typowa
efektu jonosferycznego dla satelity GPS w zenicie
5 m lecz
nawet do
100m w okresach
lub burz jonosferycznych.
efektu jonosferycznego jest odwrotnie proporcjonalna do kwadratu
fali. Taka
wykorzystanie odbiorników
do
eliminacji
poprzez porównanie
PL1 i PL2, zmierzonych
odpowiednio
w
pasmach
L1
i
L2
zgodnie
z
wzorem:
W przypadku obserwacji fazowych eliminacja
jonosfery jest
zarówno za
odbiorników
z kodu P jak i bezkodowych.
fazowe
?ion
jest
wzorem:
W odbiornikach
poprawka obliczona jest za
modelu, którego parametry transmitowane przez
10.8
orbitalny.
orbitalny,
w postaci niejawnej w
d
antena satelity a
odbiorczej, jest rezultatem dwóch czynników. Po pierwsze, wyznaczenie i
predykcja orbit satelitów przez segment kontrolny obarczone
Po drugie,
systemu wprowadza
informacji orbitalnej transmitowanej w depeszy
satelitarnej.
informacji orbitalnej jest jednym z
polityki
Ograniczonego
S.A.
satelitów GPS, obliczonych z
danych z efemerydy
do 50m.
orbity jest
redukowany w metodach
wyznaczania pozycji. Jednak przy
punktami pomiarowymi –
setek kilometrów –
nie
wyeliminowanych
orbitalnych zaczyna
W przypadku precyzyjnych
z efemeryd precyzyjnych, które
po
12
godzinach po
obserwacji i
przez
placówki naukowe.
10.9
fazy.
pomiaru fazy N jest
ta
interpretowana jako
zintegrowanej fazy i
Jest to
dla
obserwowanego satelity.
N zachowuje
podczas pomiarów,
nie
zaburzenie procesu
satelitarnego.
takiego zaburzenia powoduje powstanie
fazy (ang.
Cycle Slip), czyli skokowej zmiany rejestrowanej fazy o
cykli. Wykrycie i
poprawienie
fazy jest krytyczne dla precyzyjnych pomiarów geodezyjnych z
wykorzystaniem obserwacji fazowych, w tym szczególnie techniki RTK.
10.10
pomiarowe
i fazy.

pomiaru
od odbiornika i
w
od 1
do 3m dla kodu C/A i od 10 do 30 cm dla kodu P.
pomiaru fazy jest zazwyczaj nie
kilka milimetrów. Wysoka
pomiaru fazowego
wykorzystana do filtrowania szumu pomiarowego
oba
rodzaje obserwacji.
10.11 Interferencja fal wtórnych.
Interferencja fal wtórnych,
na skutek
(ang. multipath), powoduje
rejestrowanej fazy i
interferencji fal wtórnych jest szczególnie
dla pomiaru
powodowany tym zjawiskiem
w
skrajnych przypadkach
chipu kodu, czyli 293m dla kodu C/A i 29.3m dla
kodu P. Teoretyczna
fazy spowodowanego
nie przekracza
pojedynczej
fali, jednak
centymetrowe
wyznaczenie
W takim przypadku nie otrzymamy
Skonstruowanie anten i
elektronicznych które
odporne na
jest
obecnie jednym z
problemów
przed konstruktorami
GPS.
10.12
i
centrów fazowych anten GPS
Problem nie pokrywania
rzeczywistego centrum fazowego anteny satelitarnej z punktem
teoretycznym jest znany nie od dzisiaj. Odpowiednie poprawki uzyskuje
podczas procedur
kalibracyjnych, a
po sprawdzeniu wprowadza
do opracowanych wyników
pomiaru.
problemu
w
gdy przeprowadzono i
opracowano precyzyjne pomiary GPS na
odbiornikami
producentów. W skrajnych wypadkach,
anteny
typów na
mierzonego wektora o
kilku
kilometrów
systematycznego
10 cm. W
za pierwszymi
do systematycznych
laboratoryjnych.
wszystkie anteny
GPS
centrum fazowego w
od kierunku z jakiego
dociera do nich
satelitarny, czyli od jego azymutu i
Wykazano
centrum fazowego przemieszcza
dla
L1 i L2 tej samej
anteny. Dla najlepszych anten
przemieszczenia pionowego
11 mm dla L1 i
8 mm dla L2. Poziome przemieszczenia
na poziomie 1 mm i
je
Obecnie
dobrych programów
do opracowania obserwacji geodezyjnych zawiera
wbudowane modele powierzchni
fazy dla anten
producentów.
11. SYSTEMY
Wiele
przy stosowaniu odbiorników GPS
poprzez wykonywanie pomiarów metodami
Ich realizacja
na:
- wprowadzaniu do odbiornika w czasie rzeczywistym poprawek do pomiarów, dostarczanych
przez równolegle
odbiornik systemu GPS o znanych
anteny,
transmitowanych
np.
- dokonaniu korekcji przez program
a posteriori rezultaty pomiarów
wykonanych przy
pary odbiorników: ruchomego i bazowego, o znanych
anteny.
Przy stosowaniu metod
w
stopniu
wspólne dla
pary
lub
grupy
odbiorników.
to
innymi:
-
spowodowane
jonosferycznego i troposferycznego,
-
efemeryd,
w
tym
systemem
SA,
-
zegara satelity,
efemeryd, w tym
systemem SA.
Serwis
bywa
o informacje na temat aktualnego stanu systemu.
11.1
technik
kodowych
Podstawowym celem technik
( ang. DGPS - Differential GPS) jest
i
poprawienie
w systemie. Kodowa technika
GPS pozwala
na
od 0,5 do 5m. W porównaniu z pomiarem autonomicznym jest to
bardzo
poprawa.
11.2 Zasady techniki
kodowej
Technika DGPS opiera
na odbiorniku referencyjnym umieszczonym w punkcie o znanych
DPGS czerpie swój
z faktu,
obserwowane przez dwa
odbiorniki
w tym samym obszarze
skorelowane.
swego
odbiornik bazowy
poprawki do swych pomiarów. Poprawki te
rzeczywistym wynikiem pomiaru a wynikiem obliczonym na podstawie
znanego
Mierzona
np.
lub zintegrowana faza
Odbiornik referencyjny jest
stacji referencyjnej umieszczonej w obszarze gdzie
istnieje zapotrzebowanie na
serwis pozycyjny.
techniki
o pomiary fazowe, stosuje
w geodezji,
do
pomiarowych, w rezultacie uzyskujemy
wzajemne.
Korzysta
przy tym z pierwszych, drugich i trzecich
pomiarowych
uzyskanych w tym samym czasie i/lub z tego samego satelity.
11.3 Systemy
w czasie rzeczywistym
Poprawki
formatowane i
Odbiornik bazowy wraz z nadajnikiem
poprawek
DGPS. Odbiornik
odbiera poprawki i
je w swoje obliczenia nawigacyjne. W 1983 Radio Technical Commission for Maritime
Service (RTCM)
komitet SC-104 w celu ustanowienia standardu transmisji
poprawek
i
formatów
danych.
11.3.1
Stacja
referencyjna
Typowa
stacja
referencyjna
z:
-
odbiornika
GPS
z
-
procesora
danych,
-
nadajnika
z
Odbiornik GPS
w stacji powinien
i
wszystkie satelity
ponad horyzontem. Przy obecnej konstelacji oznacza to odbiornik 12
z satelitów powinien
od momentu
do momentu
za
horyzont. Poprawki powinny
transmitowane zaraz po stwierdzeniu odpowiedniego
poziomu
do
szumu
i
ustabilizowaniu
filtrów
kodu
i
Stacja referencyjna powinna
kodu pomiarami
które
mniej
zaszumione.
Stacja referencyjna ma
poprzez porównanie pomiarów
ze

do satelity, natychmiastowej detekcji
danych. Powinna
ona
o zaistnieniu takiej sytuacji odbiorniki ruchome
Sytuacja ta jest niezmiernie
prawdopodobna, lecz
jest,
satelita
zacznie
dane zanim stacja kontrolna
mu nowy status
"zdrowia".
jonosferyczne nie powinno
modelowane przez
-
blisko stacji referencyjnej
takie samo
jak stacja i
poprawki
je
-
daleko od stacji,
o tym
i
stacji) i
sami
obserwowane przez siebie i
takie jest lepsze
modelowanie przez
modelu od
stacja-odbiornik, a zatem
jego
troposferyczne
nie powinno
modelowane przez
- dla satelitów
10 stopni elewacji jest ono mniejsze od jednego metra - dla aplikacji
nawigacyjnych
nie
ma
ono
znaczenia
- w przypadku
blisko stacji referencyjnej poprawka wyeliminuje
je
oddaleni od stacji, w
na
znacznie
od
stacji
1000 m)
swój model
troposfery
warunki atmosferyczne
i warunki atmosferyczne
na stacji referencyjnej dla których
przewiedziano
w
standardzie
RTCM-104
typu
15.
Dla
nawigacyjnych nie ma potrzeby stosowania na stacji zegara atomowego,
wystarczy
oscylator kwarcowy. Wynika to z faktu,
zegara powoduje
poprawek o
dla nich
która z kolei nie
wyznaczania pozycji w odbiorniku ruchomym. Jest to
tylko w sytuacji, gdy odbiornik
ruchomy w danym
poprawek wyznaczonych na
Dlatego
jest by odbiornik ruchomy nie
poprawek dla pewnych
satelitów na podstawie
ich zmian a dla innych
otrzymanych na dany
moment poprawek
w ten sposób
w swe
zegara stacji
referencyjnej. W
sytuacjach wysokostabilny zegar jest jednak
-
transfer
czasu,
-
radiowych o
transmisji - odbiornik ruchomy
poprawek
wyznaczonych
na
momenty,
- odbiorniki ruchome
w terenie o ograniczonej
sfery niebieskiej -
odbiorniki z wysokostabilnymi zegarami i
poprawkami
mogli przez pewien czas
trójwymiarowe
tylko
trzema satelitami
pojawi
czwarty; nie jest to jednak zalecane.
11.3.2
z
elementów:
-
odbiornika
GPS
z
-
procesora
danych,
-
odbiornika
radiowego
poprawek
z
Na odbiornik ruchomy nie
szczególnych
jego konstrukcja
powinna
dostosowana do przeznaczenia i oczekiwanej
W
to
odbiorniki:
-
- jedno lub kilku
technik sekwencyjnych,
multipleksowania
-
uzyskiwane na podstawie danych ze wszystkich satelitów lub
najlepszego
zestawu,
-
dowolne
czujniki.
Dla polepszenia
odbiornik
pomiary fazy
typów od 18 do 21
Real Time Kinematic, stosowana
technika on-the-fly
szybkie
przy
pomiarach
fazy.
11.3.3
transmisyjne
transmisyjne
i
Istnieje tylko
jeden warunek:
transmisji powinna
co najmniej 50 baud. Z punktu
widzenia odbiornika ruchomego rodzaj
nie ma znaczenia tak
jak dostarcza ono
poprawek. W przypadku DGPS
publicznie
powinno
standardowe i jego
parametry ogólnie
W instalacjach prywatnych
jest kodowanie
a tym samym ograniczenie
tylko do
autoryzowanych.
11.3.4
radiowych
dla
transmisji
poprawek
-
Niskie
i
Pasmo niskiej
(LF)
od 30 do 300 kHz natomiast pasmo
od 300 kHz do 3 MHz. Na
tych
m.in.
morskie
i
lotnicze
latarnie
kierunkowe.
US Coast Guard
systemu swych latarni kierunkowych do transmisji poprawek w
standardzie RTCM.
latarni jest modulowana
MSK, która wymaga
minimalnego pasma dla danej
transmisji, nie powoduje
w pracy
normalnych odbiorników
z
latarni, oraz odporna jest na
atmosferyczne.
wynosi w praktyce ponad 150 kilometrów na morzu i 20 do 100
kilometrów w
transmisji wynosi od 50 do 100 bitów na
Obecnie
na prawie
USA
poprawki
w tym
systemie.
na polskim
trzy stacje
poprawki
na falach
doskonale
one
jednak ich
na
nie
przekracza
kilometrów.
Komercyjne
ustanowione
w górnym zakresie pasma MF na
bliskich 2 MHz. Systemy te przeznaczone
do
morskich
FSK, jeden ton przypisany jest zeru a drugi jedynce.
te
z
AX.25.
wynosi 400 kilometrów na morzu i 50 na
-
Fale
krótkie.
Pasmo fal krótkich
od 3 do 30 MHz. Komunikacja w tym
opiera
przede wszystkim na odbiciach od jonosfery
transmisji do
kilometrów.
Problem
jednak zaniki
a
pasma, które
interferencje. W niektórych rejonach
komercyjne
HF DPGS podobne
do
w
rejonie
2
MHz.
-
Fale
ultrakrótkie.
Pasmo wysokiej
od 30 do 300 MHz natomiast pasmo
ultrawysokiej
od 300 MHz do 3 GHz. Komunikacja na tych
pasmach przy
nadajników naziemnych w zasadzie ograniczona jest do linii
W
jednak troposfera przenosi fale nieco poza horyzont optyczny.
Dla
gdy obydwie anteny
na
10 metrów maksymalny
transmisji wynosi 26 kilometrów.
ten
nieznacznie
na morzu,
natomiast
na
mniejszy ze
na
terenu i
budowle.
retransmiterów. Dane
z
modulacji FSK i
AX.25 przy
1200, 2400 i 9600
bitów
na
z
sieci telefonii komórkowej.
one jednak ograniczenia innych systemów UHF/VHF, takie jak ograniczony
na przeszkody terenowe, a ponadto koszty ich
sieci komercyjnych i publicznych
radiowych. Istnieje
transmisji danych na ich
System ten jest wykorzystywany w wielu miastach USA i
Kanady.
-
satelitarna.
satelitarnych jest pokrycie
obszarów. Obecnie
komercyjne systemy oparte o satelity Inmarsat i Landsat. Opracowywane
systemy
oparte na satelitach niskich orbit (LEO).
ich w porównaniu z systemami opartymi na
satelitach geostacjonarnych jest mniejszy rozmiar i koszt odbiornika.
11.4 Odmiany technologii
11.4.1
Poprawki
do
lecz niekiedy
jest obliczanie poprawek jako
a
stacji bazowej. Poprawki te
dodawane do pozycji
obliczanej przez odbiornik ruchomy.
to jest pozornie prostsze, jednak
wyznaczonej pozycji silnie
od wykorzystanych do jej wyznaczenia satelitów.
Odbiornik referencyjny
i
poprawki do pozycji obliczonej z
kombinacji
satelitów.
11.4.2
Poprawki
do
jest obliczanie poprawek do
Poprawki te
przez
a
na podstawie efemerydy i
stacji bazowej. Odbiornik ruchomy dodaje
poprawki
do
swoich
pomiarów
Stacja bazowa powinna
wszystkie widoczne satelity i
dla nich poprawki
temu nie dochodzi do sytuacji, gdy odbiornik ruchomy nie
z powodu zbyt
liczby satelitów z poprawkami.
obserwowane przez
i odbiornik ruchomy
skorelowane do
400-500
km.
Poprawki otrzymywane przez odbiornik ruchomy zawsze
ze
na czas potrzebny do ich obliczenia i czas transmisji.
jest
tego
która nie
pogorszenia
Dynamika zmian SA
do 0.2 m/s,
po 5 sekundach poprawki obarczone
1 m.
1 m za graniczny dopuszczalny
poprawki wymagane jest co najmniej jedno
uaktualnienie na 5 sekund. Wymaganie to
oprócz poprawek
zmian
Wtedy poprawka w momencie
obliczona
w
sposób:
gdzie oznacza
do
t0 jest momentem na który obliczona
poprawka, a t -t0
traktowane jako wiek poprawki. Przy zastosowaniu tej metody
poprawki
po
30
sekundach
do
1,5
m.
W praktyce,
oszacowanie nie zawsze pozostaje prawdziwe. Kilkumetrowe
odchylenia od pozycji nominalnej zazwyczaj
widoczne
po
10 sekund
od
epoki
poprawek.
Poprawki
transmitowane
w
dwojaki
sposób:
Ze stacji bazowej do odbiornika ruchomego -
spotykana sytuacja. Odbiornik
ruchomy
sam
oblicza
Odbiornik ruchomy transmituje surowe dane nawigacyjne do stacji bazowej, która oblicza
odbiornika ruchomego.
takiemu
obliczenia dokonywane przez
odbiornik ruchomy
uproszczeniu, prostsza
i jego konstrukcja. Metoda
ta wykorzystana jest w systemach automatycznej lokalizacji pojazdów (AVL - Automatic
Vehicle
Location).
11.4.3
Pomiar
kodu
pomiarami
fazy
Typowy
losowy pomiaru kodu ma
jednego procenta
fali. Dla kodu C/A oznacza to
trzech metrów. Natomiast dla kodu P
30
cm,
kod
ten
jest
jednak
tylko
autoryzowanym.
W przypadku pomiarów fazy
jest
milimetra. Problemem jest jednak
a
w momencie
pomiaru,
z
liczby cykli. Pomiary kodu nie
tej
-
do satelity
jest
znana.
cechy
obydwu
typów
pomiarów.
czyli:
-
lecz
zaszumienie - w przypadku pomiarów kodu,
-
tylko przyrostów
lecz minimalne zaszumienie - w przypadku
pomiarów
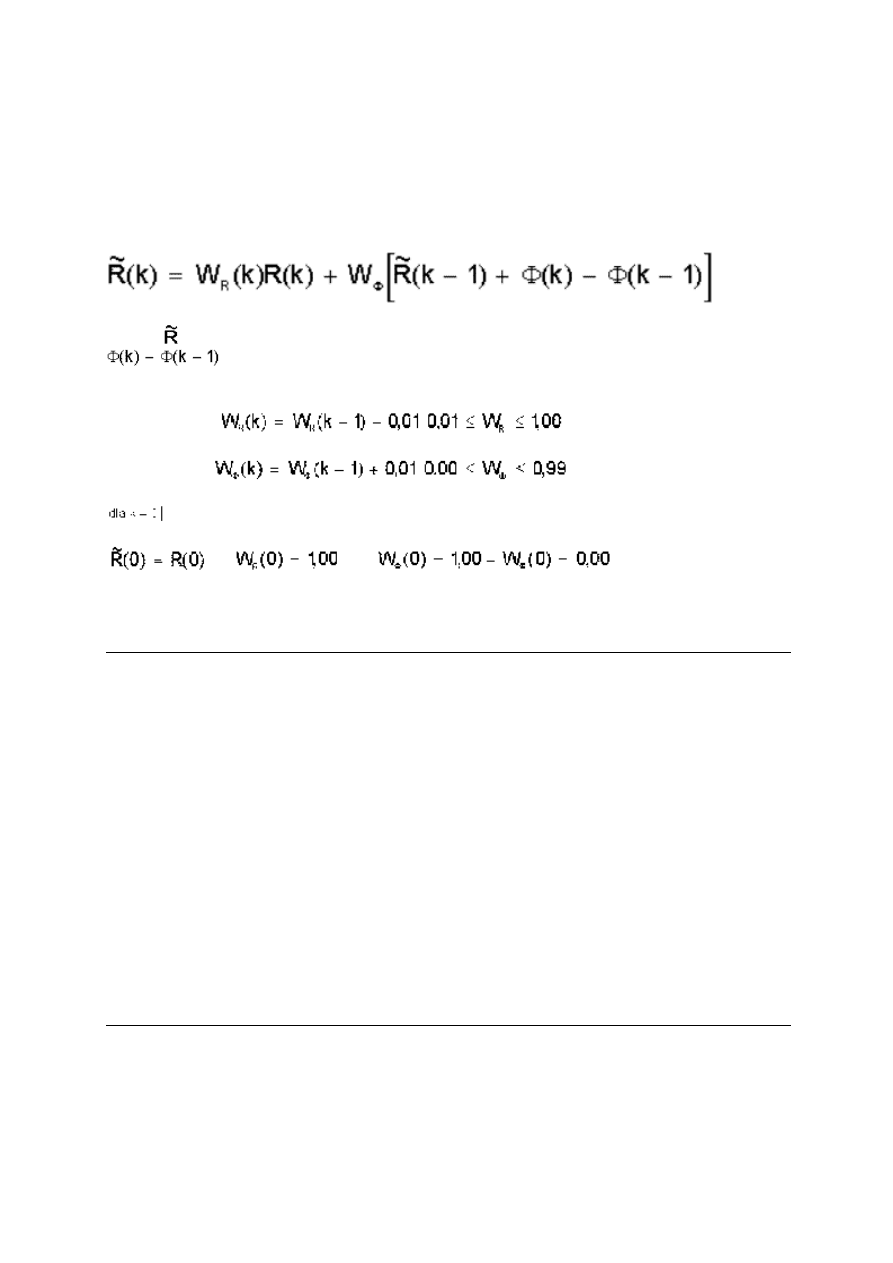
otrzymujemy nowy typ pomiaru - pomiar kodu
pomiarem
praktycznej realizacji
jest
filtru rekursywnego w którym
waga fazy jest
a waga kodu zmniejszana.
w
momencie
k
ma
gdzie
jest
R jest
jest zmierzonym przy
fazy
przyrostem
do satelity.
Wagi
w
granicach:
11.4.4
Pomiary
kinematyczne
w
czasie
rzeczywistym
Pomiary fazy
w trybach
precyzji milimetrowej.
Pomiary te
rutynowo
do precyzyjnego
z
technik
statycznych, kinematycznych i pseudokinematycznych. Wszystkie te metody
zainicjowania pomiarów w punkcie o znanych
lub zainicjowania przez
kilkuminutowy pomiar w
punkcie. Ostatnie
powstaniem
techniki "on-the-fly" nie
procesu inicjalizacji i
uzyskanie
centymetrowej. Pomiary
wykonywane
w czasie rzeczywistym
i
wtedy
Real-Time
Kinematic.
Standard RTCM przewiduje dla pomiarów RTK
typu 18 do 21. Konieczna jest
jednak
uaktualniania
poprawek:
0.5
do
2
sekund.
Dekorelacja przestrzenna ogranicza
centymetrowej do
kilku,
kilkunastu kilometrów
a odbiornikiem ruchomym.
11.4.5
Pomiary
w
czasie
rzeczywistym
i
postprocessing
W przypadku, gdy pomiar w czasie rzeczywistym nie jest konieczny, istnieje
zapisywania danych generowanych przez odbiornik ruchomy i odbiornik referencyjny.
obliczane jest w
momencie na podstawie zapisanych
danych.
tej metody jest rezygnacja z
radiowego.
11.5
DGPS
Ze
na pokrywany obszar
kilka metod dystrybucji poprawek.
11.5.1
Pojedyncza
stacja
referencyjna
Pojedyncza stacja dostarcza poprawek
w obszarze o promieniu
300 km. W
praktyce obszar ten jest zazwyczaj mniejszy ze
na ograniczenia
transmisji.
11.5.2
Rozszerzony
DGPS
Rozszerzony DGPS obejmuje
stacji referencyjnych. Odbiornik ruchomy
poprawek
z
stacji.
11.5.3
LADGPS
-
Lokalny
GPS
Tak jak w przypadku rozszerzonego DGPS, LADGPS obejmuje
stacji referencyjnych. W
tym przypadku jednak odbiornik ruchomy oblicza
poprawki jako
poprawek transmitowanych przez
stacje referencyjne,
to
stacjami
bez
zmniejszenia
precyzji.
11.5.4
WADGPS
-
GPS
dla
obszaru
WADGPS ( Wide Area DGPS ) jest
obszaru na którym poprawki
a przez to zmniejszenie liczby stacji bazowych potrzebnych do pokrycia danego
regionu
Poprawki
efekt wielu
ich spada wraz ze wzrostem
od stacji bazowej.
stosowane w
WADGPS polega na analizie poszczególnych
i modelowaniu ich zmian, a
poprawek dla
z satelitów do
stosuje
te poprawki
od stacji bazowej. WADGPS wymaga rozszerzenia
obecnego
standardu
RTCM-104.
W
WADGPS
rozrzuconych po
stacji kontrolnych, które
swe obserwacje do stacji
Stacja
poprawki i
je do
Efekt
stacji bazowej i
efemerydy
ze wzrostem
tak
w przypadku WADGPS
stacji
kontrolnych powinny
znane
a efemerydy obliczane przez
powinny
od efemeryd zdegradowanych przez SA. Te nowe
efemerydy
WADGPS. Ze
na
dla
punktów
jonosferyczne, powinno
ono modelowane, estymowane i
do
pod
stacja bazowa
powinna
w
odbiornik
by
pomiar
jonosferycznego.
jest
wykorzystanie
ze wzorca atomowego.
redukuje to zaburzenia zegara odbiornika i
lepsze estymowanie
zegara
satelity (SA oprócz degradowania
efemeryd degraduje
zegara
satelity).
WADGPS ma
zniesienia
SA na
terenie oraz pokonania
przestrzennych
DGPS. Szczególne
daje tu wykorzystanie do
transmisji
poprawek
satelitów
geostacjonarnych,
takich
jak
Inmarsat.
11.5.5
Technika
pseudosatelitów
Transmisja poprawek DGPS odbywa
zazwyczaj przez specjalnie do tego celu
przeznaczone
od L1 czy L2. Technika
pseudosatelitów opiera
na odmiennym
pseudosatelity
tej samej
modulacji, sposobu kodowania jak
rzeczywistych satelitów. Kody
poszczególnych pseudosatelitów
co kody satelitów
od nich
i wybrane tak by
niski
korelacji z nimi. Transmitowana depesza
zawiera
innymi
poprawki
poprawki w ten sposób unika
stosowania oddzielnej anteny,
danych i interfejsu. Ponadto odbiornik
dodatkowe pomiary
do
pseudosatelity.
Technika ta ma jednak
- propagacja
o
L1
ograniczona jest do linii
W konsekwencji
ona stosowana z
powodzeniem dla aplikacji lotniczych, w przypadku aplikacji morskich, a tym bardziej
ograniczona
jest
do
obszaru.
Standard RTCM-104 rezerwuje dla pseudosatelitów
typu 8 i 12 - odpowiednio
almanach i parametry stacji.
tych typów nie
jednak jeszcze ustalone ( w
wersji 2.1 standardu ).
11.6 Standard RTCM SC-104
Najszerzej stosowanym standardem transmisji poprawek jest standard zdefiniowany przez
Radio Technical Commision For Marine Services. W technologii RTK, ze
na
transmisji danych stosuje
inne, bardziej
formaty informacji, nie one jednak
Format RTCM SC-104 zawiera 63
typy
przedstawione w
tabeli.
Nr typu Aktualny status
Nazwa depeszy
1
Ustalona
Poprawki
DGPS
2
Ustalona
Poprawki delta-
DGPS
3
Ustalona
Parametry stacji referencyjnej
4
Wycofana
Geodezyjna
5
Ustalona
Status konstelacji
6
Ustalona
Ramka zerowa
7
Ustalona
Almanachy latarni morskich
8
Próbna
Almanachy pseudosatelitów
9
Ustalona
Poprawki
dla indywidualnych satelitów
10
Rezerwowa
Poprawki
kodu P

11
Rezerwowa
Delta poprawki kodu C/A L1 i L2
12
Rezerwowa
Parametry pseudosatelitów
13
Próbna
Parametry
naziemnych
14
Rezerwowa
Depesza pomocnicza geodezyjna
15
Rezerwowa
Depesza jonosferyczna (troposferyczna)
16
Ustalona
Depesza specjalna
17
Próbna
Almanach efemeryd
18
Próbna
Nieskorygowane pomiary fazy
19
Próbna
Nieskorygowane pomiary
20
Próbna
Poprawki fazy
RTK
21
Próbna
Poprawki
RTK
22-58
Niezdefiniowane
59
Próbna
Depesza prywatna
60-63
Rezerwowe
11.6.1
Typ
1
-
Poprawki
GPS
Jest to podstawowy typ
Zawiera
i
Z
jest parametr IOD (Issue of Data),
moment na który wyznaczono
i parametry zegara satelity, na podstawie których z
kolei wyznaczona jest poprawka dla tego satelity. Odbiornik ruchomy
tylko
do
o
tym
samym
IOD.
11.6.2
Typ
2
-
Poprawki
delta-
Poprawki te przeznaczone dla odbiorników które nie
nowych efemeryd zaraz po
otrzymaniu. Stacja referencyjna dekoduje efemerydy natychmiast,
sytuacje gdy IOD danych przez
i IOD danych
przez odbiornik
ruchomy
wtedy obarczone dodatkowym
z
danych.
Sytuacji takiej zapobiega
poprawki delta-
poprawki
wyznaczonej na podstawie danych o starym IOD i wyznaczonej na podstawie danych o
nowym IOD oraz delta-
poprawki
zmian
tego typu ma sens tylko gdy transmitowana jest wraz z
typu 1.
Odbiornik ruchomy oblicza
do
jako
poprawki
transmitowanej w
typu 1 i poprawki delta-
z typu 2.
11.6.3
Typ
3
-
Parametry
stacji
referencyjnej
ta zawiera
ECEF anteny stacji referencyjnej z
podane
w
WGS-84.
11.6.4
Typ
4
-
Parametry
geodezyjne
ta przeznaczona
dla pomiarów geodezyjnych z
zintegrowanych
pomiarów
Obecnie
ona wycofana i w
wersji standardu wykorzystana
do
innych celów. Jej
18 i 21.
11.6.5
Typ
5
-
Status
konstelacji
ta zawiera dane
odbiorników ruchomych.
na nie, dla
z satelitów: "zdrowie" takie jak transmitowane w depeszy nawigacyjnej,
obserwowany przez
stosunek
do szumu dla danego satelity,
zezwolenie na
do nawigacji danego satelity
transmituje on
o braku
"zdrowia",
o
przewidywanej
utracie
"zdrowia"
przez
11.6.6
Typ
6
-
Ramka
zerowa
ta nie zawiera
parametrów.
ona
do
transmisji, transmitowana w momencie, gdy inne
nie
jeszcze gotowe, lub
do utrzymania synchronizacji przez odbiorniki ruchome. Pole danych tej
jest
zer
i
jedynek.
11.6.7
Typ
7
-
Almanach
latarni
morskich
ta zawiera almanach latarni morskich
w stacje
DGPS.
Almanach zawiera dane o:
latarni,
pokrywanym obszarze, typie
modulacji, sposobie kodowania i „zdrowiu”. Informacje te wykorzystane
przez
odbiornik
ruchomy
do
wyboru
optymalnej
stacji
referencyjnej.
11.6.8
Typ
8
-
Almanach
pseudosatelitów
ta wspiera
pseudosatelitów. Zawiera ona:
pseudosatelity,
przypisany mu kod Golda, czteroznakowy identyfikator,
o „zdrowiu”. Cel jej
transmisji
jest
taki
sam
jak
w
przypadku
typu
7.
11.6.9
Typ
9
-
Poprawki
dla
podzbioru
satelitów
ta zawiera takie same poprawki jak
typu 1. Nie zawiera ona jednak
poprawek dla wszystkich satelitów lecz dowolnego podzbioru. Przeznaczona jest ona dla
powolnych
radiowych w
skokowo
Odbiornik
poprawki nie
skompletowana zostanie
typu 1. Ponadto
wzrost
zaburzy odbiór poprawek tylko dla
pewnego podzbioru satelitów, a nie dla wszystkich jak by to
miejsce w przypadku
typu 1.
tego typu stosowana
wraz z
typu
1 dla
poprawek dla satelitów o
wysokiej
zmian
Stosowanie tej
ogranicza
posiadania zegara o
poprawki
czas
odniesienia.
11.6.10
Typ
10
-
Poprawki
dla
kodu
P
ta
ma poprawki
otrzymane dla pomiarów kodu P na
L1 i L2. Jej
w obecnej wersji standardu nie jest ustalona.
11.6.11
Poprawki
dla
kodu
C/A
L2
ta zarezerwowana jest dla poprawek
do pomiarów kodu C/A na
L2, w wypadku gdyby
satelity taki kod
Jej format
podobny
do
formatu
typu
1.
11.6.12
Typ
12
-
Parametry
stacji
pseudosatelitów
ta
ma offset zegara stacji pseudosatelitów oraz
fazowego jej anteny nadawczej. Jej format w obecnej wersji standardu nie jest ustalony.
11.6.13
Typ
13
-
Parametry
naziemnego
ta zawiera
i szacunkowy
naziemnego
poprawek.
Zawiera ona
o statusie
jest on równy jeden
transmisji
typu 16
dalsze
(np. planowane
pogoda
przerwy w transmisji ).
11.6.14
Typ
14
-
Dodatkowe
informacje
geodezyjne
i
format
do
ustalenia.
11.6.15
Typ
15
-
jonosferyczna
(
troposferyczna
)
Ostateczny format tej
nie
jeszcze ustalony.
ona
parametry
modelu jonosfery,
te same co podane w ICD-GPS-200 lecz oparte na bardziej
aktualnych danych. Parametry troposfery
i
11.6.16
Typ
16
-
specjalna
ta zawiera dowolny tekst w
kodzie ASCII,
ona
lub
wydrukowana.
11.6.17
Typ
17
-
Almanach
efemeryd
17 zawiera efemerydy satelitów. Nadawana jest na wypadek gdyby IODC ( Issue
of Data, Clock ) nie
IODE ( Issue of Data, Ephemeris ). W takiej sytuacji stacja
referencyjna
poprawki na podstawie starych efemeryd. Transmitowane
efemerydy
szybkie skorzystanie z poprawek odbiornikowi
w
systemie.
11.6.18
Typy
18
-
21
-
RTK
18 - 21
informacje przeznaczone przede wszystkim dla
pomiarów geodezyjnych. Typ 18 zawiera nieskorygowane pomiary fazy
natomiast typ 19 zawiera nieskorygowane pomiary
typu 20 i 21
odpowiednio: poprawki do fazy
i poprawki do
21 jest podobna do
1, lecz zawiera dodatkowe
informacje
o
danych.
11.6.19
Typy
22
-
58
-
Niezdefiniowane
22
do
58
obecnie
niezdefiniowane.
11.6.20
Typ
59
-
prywatna
59 zarezerwowana jest dla operatorów stacji referencyjnych, którzy chcieliby
swym
specjalne
11.6.21
Typy
60
-
63
-
Zarezerwowane
60 - 63 zarezerwowane dla celów testowania nowych typów
11.7 Redukcja
w technikach
w
technologii
GPS
-
ograniczony
-
SA,
-
efemeryd,
-
zegara
satelity,
-
jonosferyczne,
-
troposferyczne,
-
odbiór
odbitych,
-
szum
kodu
i
11.7.1
Ograniczony
Segment nadzoru ma
celowego
w sygnale transmitowanym
przez
satelity.
Wprowadzane
zaburzenie
dwie
- proces epsilon: zmieniane
parametry efemerydy by
satelity
-
amplituda
do
100m,
okres:
godziny,
- proces delta: zaburzana jest
zegara satelity co powoduje
w
momentu
transmisji
-
amplituda
do
50m,
okres:
minuty.
Klucz
zaburzenia
jest tylko autoryzowanym
nieautoryzowani
Obserwowany
SA na pomiar
jest taki sam dla
temu
poprawka
eliminuje
SA
Problemem jest
zmian SA, co powoduje
dekorelacji czasowej.
Powoduje
to
transmisji
poprawek.
11.7.2
jonosferyczne
w propagacji
zmienia
zazwyczaj od 20-30 metrów w
do 3-6
metrów w nocy. Stanowi to problem dla odbiorników
na jednej
(
L1, kod C/A ). Odbiorniki
na dwóch
to
Efekt
jonosferycznego wykazuje
Wraz ze
wzrostem
odbiornika ruchomego od stacji bazowej wzrasta
dróg, które
w
jonosferze
do
z
tych
odbiorników.
Przyjmuje
jonosferyczne jest
kompensowane do
250
km.
11.7.3
troposferyczne
to powstaje w dolnych warstwach atmosfery. Wynosi ono do 3 metrów.
jest od temperatury,
i
Jest ono prawie
kompensowane.
11.7.4
efemeryd
ten jest
rzeczywistym
satelity a
przewidzianym na podstawie danych orbitalnych satelity.
ten wynika z
modelu ruchu satelity oraz nieprzewidywalnych perturbacji. W
SA jest on
mniejszy
3 metry. Poprawka
eliminuje ten
prawie
11.7.5
zegara
satelity
rzeczywistym czasem GPS a wskazaniem zegara satelity. Obserwator
ruchomy i stacja referencyjna
taki sam
zegara satelity,
czemu jest on

kompensowany.
11.7.6
Odbiór
odbitych
Nieskorelowany
odbiornikiem ruchomym a
- nie jest
eliminowany.
11.7.7
Szum
kodu
i
Nieskorelowany
odbiornikiem ruchomym a
- nie zostanie
wyeliminowany.
12. Wybrane techniki geodezyjne
12.1 Metoda statyczna
Najszerzej
i najbardziej
jest technika obserwacji statycznych.
innych
jest to metoda typu postprocessing,
pomiary
fazowe.
Zapewnia ona
do
w pomiarach GPS,
pozycjonowania.
punktów wyznaczonych
2-5 mm,
wymaga ona jednak
jednoczesnych obserwacji na obu punktach.
Ogólny algorytm,
stosowany do obliczania przyrostów pomierzonego wektora
trójwymiarowego w sesji statycznej
w wielu podstawowych publikacjach
GPS. Tutaj przedstawimy go w ogólnych zarysach.
punktów obliczane
na podstawie zmierzonych
do przynajmniej 4
satelitów. Na podstawie
po jednym dla
satelity dla danej epoki
obserwacyjnej, obliczane
obu pomierzonych punktów oraz
poprawki zegarów obu odbiorników, tak jak w metodzie autonomicznej. Ten etap
wykonywany jest przez procesor
odbiornika. W kolejnym kroku wykonywane
obliczenia
(jeden z punktów wektora zostaje
za
i uzyskuje
obliczone poprzednio), z wykorzystaniem pomiarów fazowych.
tzw. potrójne
z pomiarów fazowych,
czemu parametry ambiguity
Parametry ambiguity to
cykli,
z
a
w momencie
pomiarów.
tych niewiadomych obliczane
w trakcie dalszego opracowania pomiarów
fazowych. Na podstawie potrójnych
obliczane
danego wektora, z
dla
0.5 - 1 m.
punktu obliczanego
na tym
etapie poprawione.
program oblicza tzw. podwójne
z pomiarów fazowych.
z wyrazów równania obserwacyjnego sprowadzany jest do postaci liniowej, przy
zastosowaniu standardowej procedury
w szereg Taylora i
tylko
pierwszych wyrazów
Przy
problemu pozycjonowania na
podstawie pomiarów fazowych w sesjach statycznych wektor niewiadomych zawiera
przyrosty
dla wektora
obie stacje oraz wspomniane
parametry
ambiguity.

obserwacje przeprowadzono na stacjach A i B, do satelitów i, j, k, l oraz
A
za
a
i za
odniesienia. Macierz
H
liniowych dla omawianego przypadku (2 stacje i 4 satelity) przy jednej epoce obserwacyjnej
z trzech wierszy i
kolumn
trzy równania i 6 niewiadomych do
wyznaczenia). Po wprowadzeniu kolejnych epok obserwacyjnych uzyskuje
obserwacji.
macierz
H, zdefiniowany wektor niewiadomych X oraz dany wektor
obserwacji, otrzymane równania
z wykorzystaniem metody najmniejszych
kwadratów. Na tym etapie
parametry ambiguity obliczane jako liczby rzeczywiste
typu „float”). W kolejnym kroku
próba
ambiguity do
liczb
i
ich za
znane. Poszukiwany jest taki zestaw ambiguity,
przy którym RMS
kwadratowy, „Root Mean square error”)
jest
minimalny. Badane
zestawy liczb
otrzymanych poprzez zmiany o +1 lub -1
otrzymanych w
typu „float”. Po wybraniu odpowiedniego zestawu liczb
przeprowadzane jest ostateczne
przyrosty
typu „fixed”).
typu „float” zwykle
5-10
cm,
a
dla
typu
„fixed”
nie
1
cm.
Tradycyjnie, metoda statyczna stosowana jest do aplikacji precyzyjnych, jak wyznaczanie
punktów geodezyjnych wysokich klas, do badania
punktów,
i
deformacji
powierzchni
terenu
lub
obiektów
tu
o
metodzie pozycjonowania, zwanej
(ang. „Rapid Static”). Metoda ta
stosowana,
mamy do
dyspozycji odbiorniki z kodem precyzyjnym „P”. Dodatkowe ograniczenia to
satelitów
(minimum 5, zalecane
oraz
wyznaczanego wektora (nie powinna
10 km).
wszystkie te warunki
milimetrowe
na podstawie 10-15 -minutowych sesji obserwacyjnych.
12.2 Metoda RTK
Technika RTK („Real-Time Kinematic”) wykorzystuje pomiary fazowe. Pozycjonowanie
daje
1-2 cm, przy bardzo krótkich czasach obserwacji. Technika
ta
wymaga odbiornika umieszczonego na stacji referencyjnej, o znanych
oraz odpowiedniego
z odbiornikami ruchomymi.
W technice RTK stacja referencyjna emituje informacje
pomiarów fazowych
(surowe pomiary fazowe oraz poprawki). Czas, jaki jest potrzebny na
tak
wysokich
wyznaczenia
od
satelitów (minimum 5)
oraz od
do stacji referencyjnej (maksymalnie 10 km).
informacji
musi
przynajmniej
9600
Algorytmy stosowane w technice RTK
odpowiednie
w bardzo
krótkim czasie, na podstawie niewielkiej liczby obserwacji (krótki czas obserwacji). Znanych
i stosowanych w praktyce jest wiele
metod
te wymogi. Wiele
z tych algorytmów wykorzystuje np. filtr Kalmana,
(w
dynamicznych
poprzez tzw. macierz
w
których niewiadomymi
trójwymiarowe odbiornika ruchomego, ewentualnie
jego
i przyspieszenie, parametry ambiguity oraz
jonosferyczne.

13.
ODNIESIENIA,
wyznaczane przez odbiorniki GPS
podawane w
odniesienia. Podstawowym
odniesienia dla techniki GPS jest World Geodetic
System 84.
stosowane
to: geograficzne, ECEF XYZ, Universal
Transverse Mercator.
odniesienia i
powinny
spójne z
z której
korzystamy. Niektóre nowe polskie opracowania topograficzne wykonywane
w
WGS 84. Na niektórych polskich mapach morskich
geograficzne
naniesiono
poprawek -
do
WGS 84. W
jednak, polskie
mapy wykonane
w
1942 i 1965. Stosunkowo proste jest przeliczenie
podawanych przez odbiornik GPS na
w
1942.
Przeliczenie na
w
1965
w oparciu o
transformacji, której jawna
nie jest podawana do publicznej
komercyjne programy
do
65 w oparciu o
punktów wspólnych. Szczególnego znaczenia problem
nabiera w pomiarach geodezyjnych i geodynamicznych.
13.1
odniesienia,
i osnowy geodezyjne.
odniesienia
elipsoida lub geoida,
zasadniczo odmienny
charakter i cechy. Geoida zdefiniowana jest jako powierzchnia ekwipotencjalna, która
zawiera
poziom mórz. Jest ona
jednoznacznie
i
fizycznie
w toku klasycznych pomiarów geodezyjnych.
geoida nie
ma równania matematycznego w
i deterministycznej postaci. W
od
niej,
regionalna lub lokalna elipsoida odniesienia jest
i
za to
prostymi
matematycznymi.
W metodach satelitarnych geoida ani
inna powierzchnia ekwipotencjalna nie
Natomiast przez ruch orbitalny satelitów
staje
masy Ziemi (wspólne ognisko orbit) jako naturalny
odniesienia,
metodom naziemnym, inne
metod satelitarnych
stosownie
i
takiego
geocentrycznego, dla którego
np.
WGS 84.
13.2 Dyskusja strategii analizy sieci GPS.
Satelity systemu GPS wykorzystywane do pomiarów
wektora na powierzchni Ziemi.
systemu GPS nad technikami laserowymi SLR (
Satellite Laser Ranging ) jest
utworzenia globalnej sieci stacji permanentnych, na
punktach której prowadzi
obserwacje 25 satelitów systemu GPS.
tego
systemu
wysokie orbity (ok. 20000 km nad
Ziemi), które
tego
z centrum masy Ziemi. Natomiast pomiary geocentryczne
mierzone w systemie SLR
na przestrzeni kilkunastu lat,
one
i
niskim orbitom
satelitów obserwowanych w tym systemie, czyli znacznie lepiej nadaje
do zdefiniowania
i
skali
odniesienia.
Realizacja ziemskiego
odniesienia wymaga zdefiniowania skali, orientacji i
Skala definiowana jest przez
w standardach IERS
c oraz
grawitacji GM.
utworzymy odpowiednio
pod

geometrycznym
stacji permanentnych
z
wówczas
takie stacje, które
foremny
dalszych
(polyhedron). W konsekwencji Ziemia sztywna, która jest realizowana poprzez
tego
w
od aktualnego
masy,
naziemna
odniesienia
natomiast realizowana poprzez
(lub geocentryczne
tego
i
linii
bazowych.
Stosowane
w zasadzie dwa
w przypadku analizy obserwacji GPS:
-
z
wykorzystaniem
punktów
fundamentalnych,
-
bez
wykorzystania
punktów
fundamentalnych.
W pierwszym przypadku
kilku wybranych stacji
z
zdefiniowanym
odniesienia. Aby
pojedynczego punktu nie
trzeba
wektorów do wszystkich
w sieci punktów, lecz tylko do
dowolnych trzech stacji
(kolinearnych).
pozycje tych trzech stacji
precyzyjnie wyznaczone, wtedy pozycje
punktów w tak skonstruowanej sieci
wówczas
o przeniesieniu
na punkty nowo wyznaczane,
które
odniesienia zdefiniowany przez punkty fundamentalne.
takie redukuje
stopni swobody do 9.
punktami fundamentalnymi
liczba stopni swobody
zredukowana do 6.
Oznacza to,
w
przypadku
jest
jako
3
na pierwszej stacji, dwu na drugiej i tylko jednej na trzeciej. Z
praktycznego punktu widzenia
z przynajmniej trzech
permanentnych stacji globalnych. Prostota tej metody niestety niesie za
pewne
Niektóre
stacji globalnych, które
jako
wyznaczone
które
przeniesione do
na celu wyznaczenie
stacji, parametrów orbit
satelitarnych i elementów orientacji Ziemi. Innym problemem
z
jest przypadek realizacji stabilnego systemu odniesienia w stosunku do
poszczególnych epok pomiarowych np. w przypadku analiz czasowych zmian
w tym czasie jedna lub
stacji fundamentalnych zostanie wykluczonych z
a na ich miejsce
inne,
to
innego systemu
odniesienia. Innymi
takiego
bardzo trudna do
utrzymania.
Dla
tych problemów zalecana jest inna strategia analizy sieci. Mianowicie
swobodne
wszystkimi stacjami sieci w
Wymagane jest
równomierne rozmieszczenie stacji
w sieci, co daje
rotacyjna
zorientowana
prawdziwego
tak jak realizowane to jest w modelu grawitacyjnym. Nie
ona jednak
zorientowana
realizowanego przez
a priori, tak jak w
poprzednim przypadku. Metoda ta nazywana jest
„Fiducial Free” lub „Free
Network” czyli
swobodne wyrównanie sieci. Rezultaty takiego
swobodnego wyrównania
przetransformowane do
zdefiniowanego
odniesienia, takiego np. jak ITRF.
tej metody jest fakt,
jest wolne od
poszczególnych stacji. Staje
to istotne w przypadku
transformacji do predefiniowanego
odniesienia, ale z drugiej strony
tego typu
negatywnie na sam proces transformacji.
je
bez
powtarzania
procesu analizy. W tym przypadku
dobrze widoczne
w
wektorów.

13.3 Charakterystyka i organizacja IGS
W 1994r. system GPS
w
prowadzenia
obserwacji o
geodezyjnych w skali
globu,
10-7, a w przypadku
sieci o bokach
setek kilometrów nawet 10-8 m. Tak
permanentne obserwacje GPS.
takie pozwala na widoczne
zmniejszenie
pasywnych systemu oraz, poprzez
orbit
satelitarnych,
aktywnych
(AS,
SA).
Wzrost liczby stacji permanentnych na kuli ziemskiej w pierwszej
lat
oraz
spadek ceny odbiorników
powstanie
ich
Jest
IGS
(International GPS Service for Geodynamics)
Geodynamiczna GPS.
W ramach niej
opracowanych wiele standardów, metod pomiarowych oraz kampanii
obserwacyjnych GPS. W skali globalnej IGS koordynuje
stacji pomiarowych
w
„Fiducial Network”,
stacje z punktami pomiarowymi o
znanych
na których
odbiorniki GPS w trybie
tych stacji w
przypadków
jest alternatywnymi technikami
pomiarowymi: VLBI, LLR lub SLR. Zgodnie z
IGS nazywane
one Core
Stations (COR).
punkty, których
wyznaczane. Wykorzystuje
obserwacje kodowe i fazowe na
L1 i L2. W procesie wyrównania
stacji COR traktowane jako punkty odniesienia i na ich podstawie, w ramach
odniesienia wyliczane
punktów oraz
poprawione elementy orbit satelitarnych.
w ten sposób przeniesienie przez
wysokiej
punktów COR na
punktów nowo
wyznaczanych.
stanu z 1998r, w ramach
IGS archiwizowane obserwacje z ponad 200 stacji
globalnych,
regionalnych
i
lokalnych.
Wprowadzono
jednolity
format
danych
obserwacyjnych, nawigacyjnych i meteorologicznych,
od typu odbiornika
(RINEX). Podobnie
z wyznaczanymi efemerydami precyzyjnymi satelitów GPS,
które zapisywane w formacie SP3.
one informacje o
satelitów GPS w
geocentrycznym oraz poprawki zegarów w
15 minutowych. Ogromna
danych rejestrowanych wymaga
organizacji archiwizowania danych oraz ich
opracowania. W tym celu
zorganizowane centra zbierania danych czterech kategorii:
-
operacyjne
-
dane
poszczególnych
stacji
permanentnych,
- lokalne -
i
dane z kilkunastu stacji permanentnych na
terenie
np.
Europy
- regionalne -
zbierania i archiwizacji danych GPS z kilkunastu stacji permanentnych
oraz
centrów
lokalnych,
czasem
one
zwane
„kontynentalnymi”,
- globalne -
zbierania i archiwizacji oraz
danych z
kuli ziemskiej
oraz
produktów
centrów
przetwarzania
danych,
Opracowaniem danych z sieci permanentnej IGS zajmuje
kilka centrów analitycznych,
które
fragmenty sieci globalnej IGS (ok. 60 do 90 stacji).
wszystkie
na poziomie
normalnych, w konsekwencji czego uzyskuje
globalne
IGS.
Poza wyliczaniem
stacji
w
sieci
IGS zajmuje
-
odniesienia
ITRF,
-
opracowaniem
efemeryd
precyzyjnych
GPS
i
GLONASS,

-
wyznaczaniem
parametrów
ruchu
obrotowego
Ziemi,
-
opracowywaniem
map
stanu
jonosfery.
pozwala
-
zmiany
deformacji
Ziemi
w
skali
globalnej
regionalnej,
-
perturbacji
orbit
satelitarnych,
- zachowanie
modeli w opracowaniu obserwacji GPS.
13.4 Charakterystyka
ETRS
Z praktycznego punktu widzenia pomiarów geodezyjnych z
technik satelitarnych w
sposób naturalny wykorzystuje
a nawet identyczne z
WGS-84.
W czasie XIX Zgromadzenia Generalnego
Unii Geodezji i Geofizyki w
1987r. w Vancouver
w ramach Komisji X (Sieci Kontynentalne)
Asocjacji Geodezji
EUREF (European Reference Frame).
Zadaniem podkomisji EUREF
opracowanie zasad tworzenia nowego jednolitego
odniesienia dla Europy z wykorzystaniem technik VLBI, LLR, SLR i GPS.
systemu EUREF stanowi geocentryczny
globalny definiowany przez ITRS
(International Terrestrial Reference System). Ze
na wzajemne ruchy jednostek
tektonicznych,
za
zmiany
stacji,
odnoszenia
do
epoki. Taka reprezentacja
ITRS, w postaci zbioru
na
np. 1989.0, nosi
odniesienia ITRF-89 (International
Terrestrial Reference Frame). Na terenie Europy znajduje
stacji GPS, SLR i
VLBI, które
system europejski (ETRS - European Terrestrial Reference System),
ich
ITRF w zakresie ograniczonym do kontynentu
europejskiego w postaci zbioru
stacji
w ten sposób tzw. ETRF
(Europen Terrestrial Reference Frame). Nie
lokalnych zmian tektonicznych, a
pod
jedynie ruchy
kontynentalnych,
ETRF-89, sztywno
z naszym kontynentem
ITRF w
granicach
1-3
cm
rocznie.
Podstawowe
cele
ETRS:
- odnoszenie wyników pomiarów geodezyjnych GPS do tego samego
w jakim
wykonane
pomiary,
-
baz
danych
dla
kartograficznych,
-
ujednolicenie
w
zakresie
nawigacji
lotniczej,
i
morskiej.
wymaga problem niewielkich
ITRF i ETRF.
w
ETRF
wyznaczane z
która jest
ograniczona przez ruch
kontynentalnych. Aby
ten nieuchronny efekt,
ETRF jest czasowo synchronizowany z
ITRF. Odbywa
to przez ponowny pomiar
na stacjach EUREF w celu ich
do ITRF. Wynika z tego nowy zbiór obserwacji i
wyników w postaci katalogu
stacji EUREF, aktualny dla danej epoki i
realizacji
ITRF. W ten sposób, w wyniku okresowych aktualizacji
ETRF,
tym
a
jego
przez
stacji
EUREF i
globalnym ITRF, w którym
satelitów GPS, jest
okresowo redukowana.
niewielka
w wielu praktycznych
zastosowaniach
bez
strat na

13.5 Realizacja
EUREF
EUREF
93 stacje
kraje Europy Zachodniej
(kraje EWG) oraz kraje skandynawskie, Austria i Szwajcaria. Do obserwacji wykorzystywano
odbiorniki GPS
firm. Ze
na rozmaite problemy obserwacyjne, w tym fakt,
w ówczesnym czasie system GPS
w fazie eksperymentalnej, tylko 89 stacji
do
i
ich
W roku 1990 do sieci
EUREF
punkty na Islandii, Grenlandii i Spitsbergenie,
w roku 1991 do sieci
obszar
wschodnich
Niemiec,
i
ówczesnej
W
roku 1992 EUREF
rozszerzony na terytorium Polski. Do
wytypowano 11 punktów równomiernie rozmieszczonych na terenie Polski: Borowiec,
Grybów, Zubowice, Rogaczew, Studnice,
Borowa Góra, Czarnkowo, Masze,
Lamkówko
i
Rozewie.
W chwili obecnej
EUREF obejmuje w zasadzie wszystkie
europejskie (bez
Rosji). Od 1996 roku problem realizacji
EUREF
w
przez
EUREF. W chwili obecnej
ona
z ponad 70 stacji rozmieszczonych
niejednorodnie na platformie euroazjatyckiej. Jest ona
sieci globalnej
IGS, co zapewnia
ITRF, a tym samym pozwala dynamicznie
ETRF i ITRF. Dla zapewnienia poprawnego
tego zadania zorganizowano specjalne rozproszone centrum przetwarzania
danych którego filarem jest centrum CODE
w Instytucie Astronomii Uniwersytetu
w Bernie.
tego
utworzenie kilku centrów obliczeniowych
fragmenty sieci EUREF.
z centrów jest
przekazywanie
tygodniowych do ostatecznego
w centrum CODE.
Ostateczne wyniki wyrównania sieci EUREF
w tym
po dwóch
tygodniach od daty
obserwacji. Wszystkie one
w centrum CODE lub
z centrów EUREF. W Polsce jest to centrum WUT
w Instytucie
Geodezji
i Astronomii Geodezyjnej Politechniki Warszawskiej.
13.6 EUREF w Polsce.
Przedstawiony
reprezentowany przez punkty EUREF
przeniesiony na obszar
pomiarami.
transformacji
do dotychczas stosowanego
odniesienia. W dniu dzisiejszym
ETRF
przygotowany do optymalnego wykorzystania przez
sieci na
terenie Polski, gdzie
punktami
25-40 km.
od roku 1993 do roku 1996
Topograficznego WP
pomierzona i opracowana
satelitarna ok. 600 punktów, która w
i
jest porównywalna z
POL-REF. Czyli ostatecznie na terenie Polski istnieje
wyznaczonych ponad 1000 punktów, których
normy europejskiej sieci
EUREF. Do tej
grupy punktów
polskich stacji
permanentnych.
liczby tego typu stacji
w wielu przypadkach
wykonywania obserwacji geodezyjnych tylko jednym
odbiornikiem.
14. Transfer czasu i
wzorcowej za
GPS

14.1 Jednostka Czasu
Oparta
o
stabilne
zjawiska
okresowe.
Jednostek,
International
System
of
Units
(SI).
1s = 9 192 631 770 okresów
promieniowania
z
dwoma nadsubtelnymi poziomami stanu podstawowego atomu cezu 133.
14.2
Skala Czasu Atomowego
Skala,
zdarzenia,
oparta
o
czasu.
International Atomic Time (TAI),
Skala Czasu Atomowego ustanowiona
przez Bureau International de l’Heuere, tworzona w oparciu o odczyty zegarów atomowych
w
laboratoriach, zgodna z
sekundy SI,
odchylenie
od
nominalnej mniejsze od 2*10-14.
14.3 Skala Czasu UTC
Czas uniwersalny, Coordinated Universal Time (UTC). UTC = TAI + n sekund. Sekundy
dodawane
dla
uzyskania
z
czasem
UT1.
Czas uniwersalny realizowany w laboratorium k - UTC(k), np. UTC(USNO). Docelowa
z UTC lepsza od 0.1 mikrosekundy.
14.4 CZAS
Czas
- zazwyczaj lokalna skala czasu UTC np. UTC(GUM),
o
15, 30 lub 60 minut odpowiednio do strefy czasowej, z ewentualnie
wprowadzanym czasem letnim. W Polsce od 1998 roku jednoznacznie zdefiniowane
okres
czasu letniego.
14.5 Tradycyjne Metody Powszechnej Dystrybucji Czasu
Radiowe
0,1 - 0,5s, nie
do automatyzacji.
Radiowe systemy na falach
DCF, OMA, HBG, RBU,
1-10 ms,
ograniczony
od warunków propagacji,
dobowa.
14.6 Tradycyjne Metody
Porównywania Zegarów
radiowe na falach
1-100 mikrosekund, ograniczony
LORAN-C,
0,1-1
mikrosekundy,
ograniczony
Metoda telewizyjna,
0,1-0,5 mikrosekundy,
od
stacji telewizyjnych, ograniczony
14.7 Konfiguracja Odbiornika do Dystrybucji Czasu
14.8 Tradycyjne Metody
Porównywania Zegarów
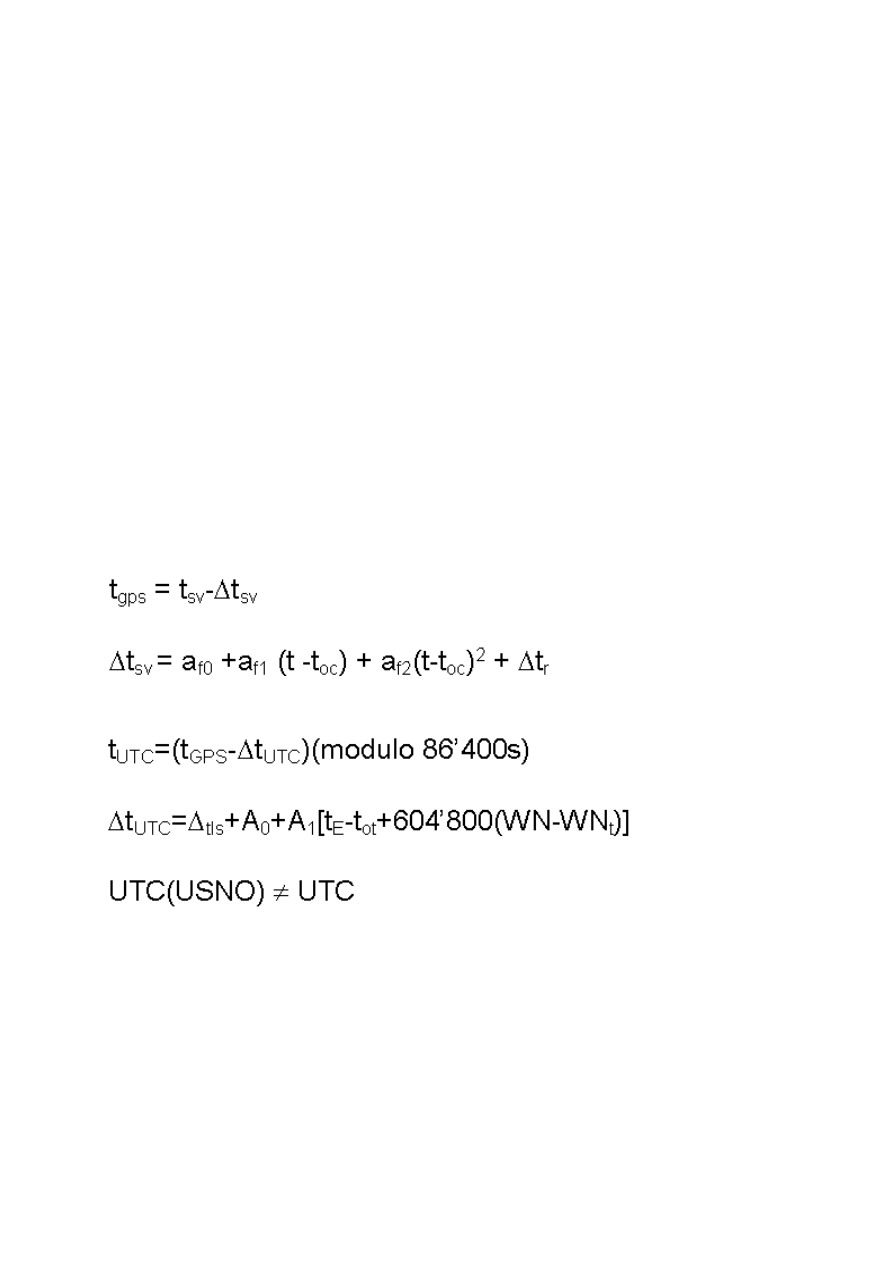
Zegar
0,1
-
0,5
mikrosekundy.
Dwukierunkowa transmisja satelitarna,
100 ps, drogie
i eksploatacja.
14.9 Transfer Czasu przy Pomocy Technologii GPS
Globalny
od czynników
/warunki propagacji, warunki atmosferyczne/.
Natychmiastowa
Natychmiastowa aktualizacja /sekundy
14.10 Transfer Czasu przy Pomocy Technologii GPS
automatyzacji
od
polityki
DOD
dla
dystrybucji
czasu:
100-500
ns
dla
skal
czasu:
10-50
ns
dla
czasu: 10-14
14.11
do skali czasu GPS
Odbiornik wyznacza moment w skali czasu GPS w oparciu o
momentu w skali
czasu
satelity
14.12
do skali czasu UTC(USNO)
14.13 Pomiar Faz: Kodu i
Pomiar fazy kodu:
chipu 1 mikrosekunda, oczekiwana precyzja 10 ns. Jednoznaczny.
Pomiar fazy
okres 0.63 ns, oczekiwana precyzja 6.3 ps. Brak
Pomiar
fazy
co
do
liczby
cykli
nx0.63ns.
Odchylenie standardowe dla blisko zlokalizowanych odbiorników: 2.5mm==8.3ps.
pomiaru
zachowana na przestrzeni wielu dób.
14.14
Dystrybucja Czasu za
GPS
< 397 ns:
gwarantowana dla 95% czasu obserwacji. Pomiar natychmiastowy.
=
167
ns:
obserwowane
odchylenie
standardowe.
Pomiar
natychmiastowy.
< 60ns: deklarowane odchylenie standardowe w trybie TRAIM. Po 60 minutach, przy
znanych i
14.15 Charakterystyka Common View
•
Warunek 1: wymagana
tych samych satelitów.
•
Warunek 2:
wymiana danych.
•
Warunek 3: specjalizowany odbiornik.
•
5-10 ns na obszarze europejskim ( odchylenie standardowe).
•
Czas trwania pomiaru: 13 minut.
14.16 Procedura Common View
Pomiar wykonywany jest z
1/s. Grupy 15 pomiarów wyrównywane
wielomianem
drugiego
Rezultaty uzyskane dla wszystkich 15 sekundowych grup wyrównywane
liniowo.
W
SA dobre rezultaty
jedynie dla kompletnych zbiorów danych.
14.17
Jonosferyczne
Zmienne
w
granicach
30-100
ns
Modelowane
w
odbiornikach
redukowane
w
technikach
Mierzone w odbiornikach
14.18
- Common View, Pomiar
Kodowy
Szacowany
1ns
jonosferyczne 2, z
modelu transmitowanego
troposferyczne
0.5, z
modelu
Szumy pomiaru
1.5
Odbicia
2
aparatury
0.5, w
kilku godzin
Pozycja satelity
0.1, znana z
20cm
Pozycja stacji
0.5, znana z
10cm
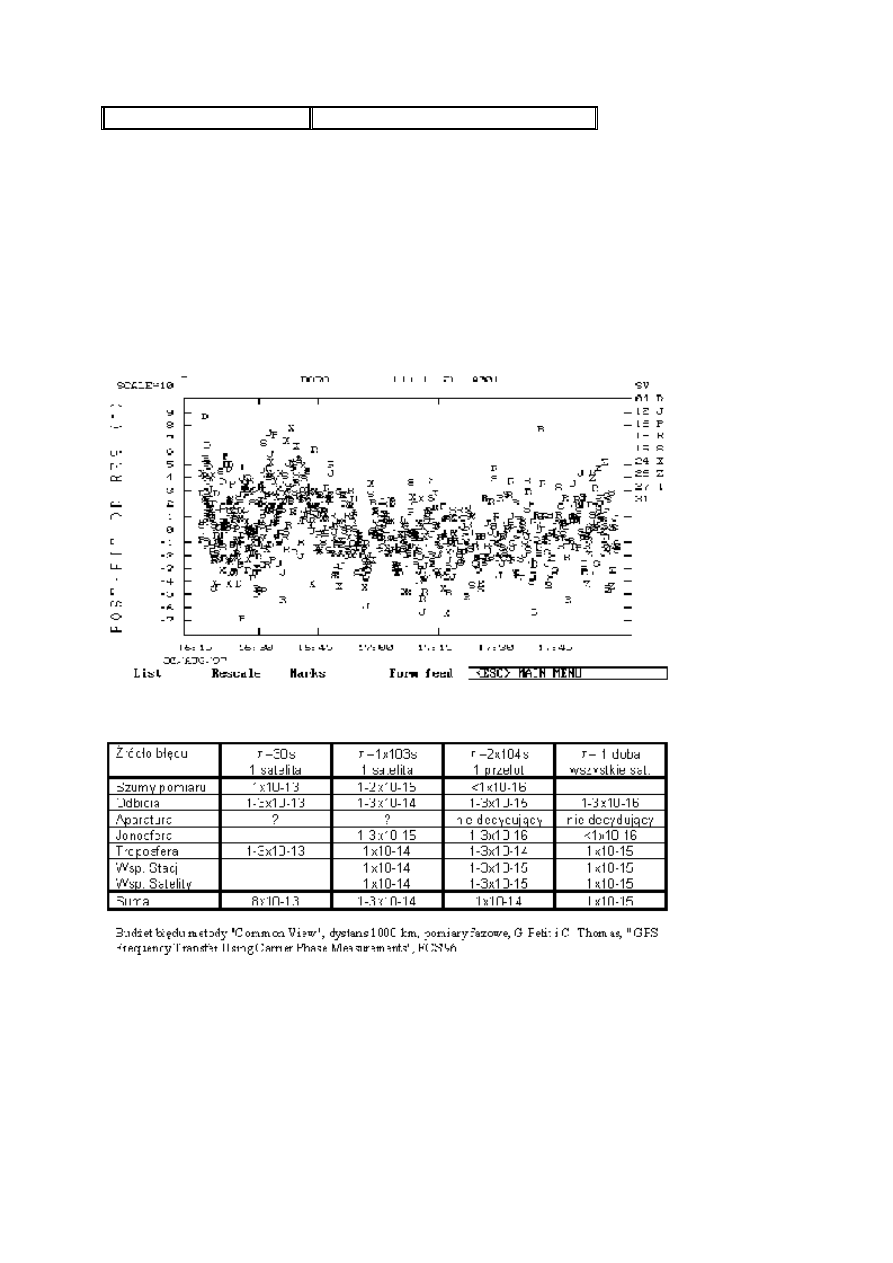
Suma
3.3
14.19 Pomiary Geodezyjne
Pomiary
geodezyjne:
oparte
o
pomiar
fazy
Podwójne
czasu wybranego satelity
przez
odbiorniki + efekt geometryczny + poprawki +
14.20 Residua obserwacji geodezyjnych.
Sigma=
2.5
mm
=
8.3
ps
14.21
- Pomiar
Fazowy
14.22
Porównania
- Metody
15. NIEKTÓRE CYWILNE ZASTOSOWANIA GPS
•
Archeologia - ewidencja stanowisk, mapy stanowisk.
•
Banki - dystrybucja
czasu.

•
Budownictwo
- wytyczania, nadzór
•
Drogownictwo - automatyczna ewidencja
automatyczna rejestracja stanu
nawierzchni.
•
Energetyka - ewidencja obiektów, przebiegu tras, dystrybucja czasu, synchronizacja
zegarów.
•
Fotogrametria - rejestracja
kamery w momencie wykonywania
wyznaczanie
markerów.
•
Geodezja - wyznaczanie
i wektorów z
praca w czasie rzeczywistym, wytyczanie.
•
Geologia - ewidencja zasobów, mapy zasobów, nawigacja.
•
Geodynamika - badania ruchu wirowego Ziemi, analiza ruchu bieguna,
ruchu kontynentów, definicja
odniesienia.
•
Górnictwo - rejestracja
gruntu, nawigacja platform wiertniczych.
•
Hydrologia - nadzór
ewidencja obiektów, szybka aktualizacja map.
•
ruchu drogowego - automatyczna rejestracja przebiegów, tras, czasów
oczekiwania, natychmiastowa lokalizacja miejsc wypadków,
w ruchu,
automatyczne tworzenie "zielonej fali" dla pojazdów uprzywilejowanych.
•
Kartografia -
map.
•
Kolejnictwo - ewidencja tras, obiektów, nadzór nad ruchem pojazdów, automatyczna
rejestracja przebiegów, dystrybucja
czasu.
•
- ewidencja zasobów, nawigacja w czasie oprysków, inteligentne
dozowanie w czasie oprysków.
•
Lotnictwo - nawigacja, badanie
radarów, precyzyjne
•
Melioracja - aktualizacja map, nawigacja.
•
Meteorologia - Sondowanie jono i troposfery.
•
Ochrona mienia - automatyczna lokalizacja obiektów.
•
dróg - ewidencja obiektów, ewidencja
mapy
•
Ochrona
- automatyczna ewidencja
mapy obszarów
•
Radiokomunikacja - mapy
nadajników, wyznaczanie teoretycznych
nadajników, projektowanie radiolinii.
•
- mapy przebiegów, ewidencja obiektów, ewidencja
nawigacja
•
Rolnictwo Precyzyjne - dawkowanie nawozów, cieczy opryskowych.

•
Policja - automatyczna lokalizacja pojazdów, dokumentacja miejsca
•
Ratownictwo - lokalizacja miejsc katastrof, odszukiwanie rozbitków.
•
Rolnictwo - zbieranie informacji o zasobach, plonach stowarzyszonych z
inteligentne opryski,
•
- ewidencja
nawigacja.
•
- automatyczna lokalizacja obiektów, ewidencja
lokalizacja
na
obszarach -
lasy, automatyczne tworzenie "zielonej fali".
•
Taksówki - automatyczna lokalizacja pojazdów, informacja o miejscu
•
Telekomunikacja - paszportyzacja, lokalizacja obiektów, aktualizacja przebiegu tras
kablowych.
•
Transport - automatyczna lokalizacja obiektów, nadzór nad przewozem
niebezpiecznych, informacja o miejscu
•
Miejska - ewidencja zasobów.
•
- nawigacja, monitorowanie
Podstawy
Technologii
Satelitarnych
Systemów
Lokalizacyjnych
GPS,
GLONASS
Wyszukiwarka
Podobne podstrony:
Ortyl, Podstawy technologii che Nieznany
PODSTAWY TECHNOLOGII 1 id 36842 Nieznany
3 Podstawy fizyki polprzewodnik Nieznany (2)
Ekologiczne podstawy systemu ws Nieznany
Podstawowe informacje o planowa Nieznany (4)
Podstawy Technologii Okrętów Pytania
Podstawy programowania komputer Nieznany
FANUC podstawy programowania id Nieznany
PODSTAWY(1) id 368892 Nieznany
Badanie podstawowych ukladow cy Nieznany (2)
1 Podstawowe pojeciaid 9565 Nieznany (2)
Laboratorium Podstaw Fizyki id Nieznany
intuicja podstawowa id 219277 Nieznany
podstawy obliczen chemicznych i Nieznany
Podstawy Technologii Okrętów Dodatkowe nr 3D (3)
Podstawy techniki mikroprocesor Nieznany
Sprawozdanie nr 3 (3), sem II, Podstawy Technologii Okrętów - Wykład.Laboratorium, Laboratorium nr 3
więcej podobnych podstron