Józef Beluch, Robert Krzyżek, Stanisław Latoś
6.11. Obliczenie i wyrównanie sposobem przybliżonym ciągu
poligonowego sytuacyjnego obustronnie dowiązanego kątowo i liniowo
A. Wprowadzenie
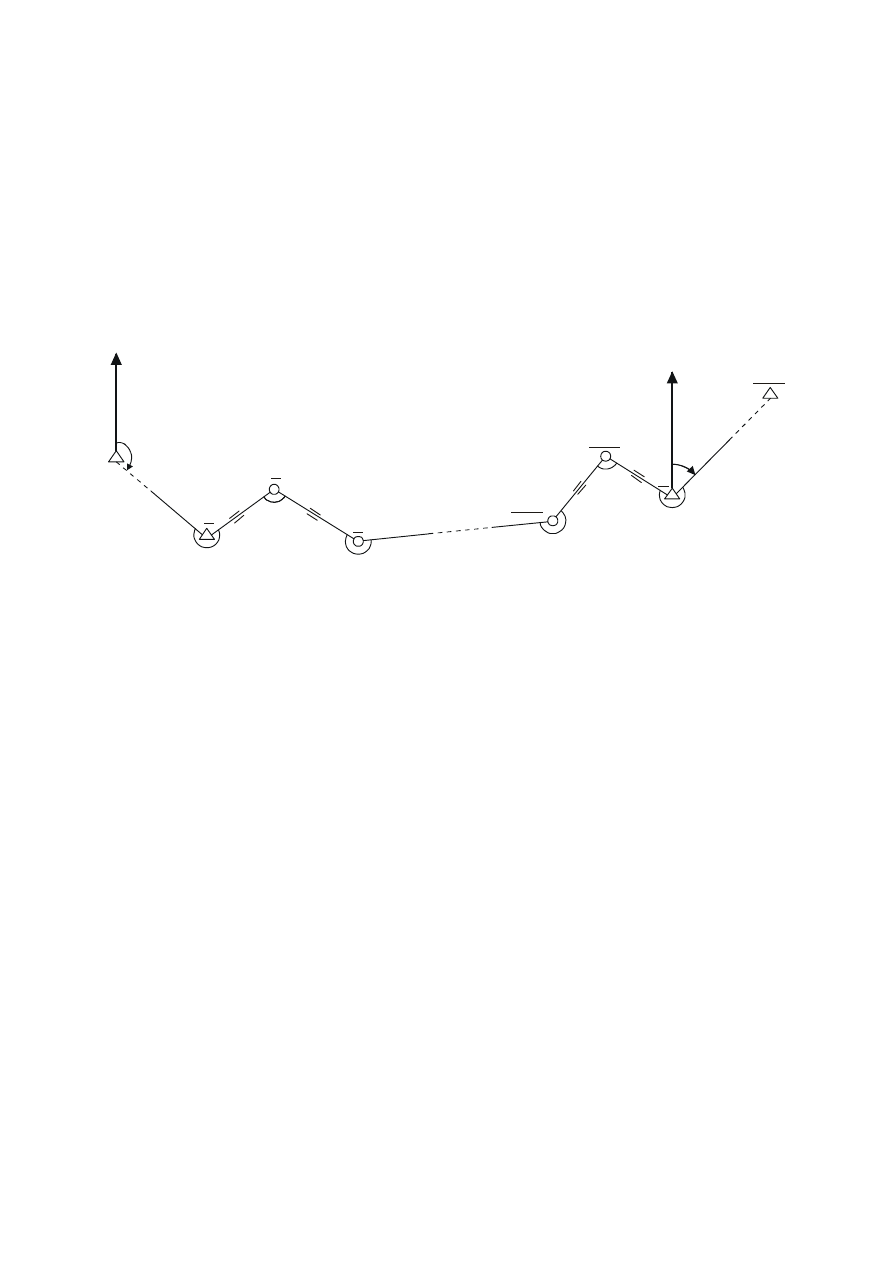
Ciąg poligonowy obustronnie nawiązany kątowo i liniowo wraz z oznaczeniami
przedstawiony jest na rysunku 6.38.
α
1
α
2
α
3
α
n
−2
α
n
−1
d
n
−2
α
n
d
1
d
2
d
n
−1
A
0
1
2
3
n-2
n-1
n+1
A
n
n
Rys. 6.38 Ciąg poligonowy obustronnie dowiązany
Obliczenie tego typu ciągu rozpoczynamy od wyznaczenia azymutu początkowego A
0
i
końcowego A
n
wzorami (6.1) – (6.3) i ich sprawdzenia wzorami (6.12) – (6.14).
Suma teoretyczna kątów w ciągu obustronnie nawiązanym wynosi:
- dla kątów lewych
[
α]
t
= A
n
– A
0
+ n
⋅ 180
0
(6.81)
- dla kątów prawych
[
β]
t
= A
0
– A
n
+ n
⋅ 180
0
(6.82)
Odchyłkę kątową wyznaczamy wzorami
t
p
α
−
α
α
f
=
[ ] [ ]
oraz
(6.83)
t
p
β
−
β
β
[ ] [ ]
f
=
gdzie
[ ] [ ]
p
p
,
β
α
- suma katów pomierzonych
Odchyłkę kątową można także liczyć jako różnicę azymutów ostatniego boku ciągu:
f
(6.84)
n
'
n
A
A
−
=
β
gdzie
1
[ ]
p
0
0
'
n
180
n
A
A
α
+
⋅
−
=
(6.85)
lub
[ ]
p
0
0
n
180
'
n
A
A
β
−
⋅
+
=
(6.86)
Obliczona odchyłka powinna spełniać warunek:
f
f
dop
β
β
≤
(6.87)
gdzie
n
m
0
dop
=
β
f
(6.88)
0
m - średni błąd pomiaru kąta.
W ciągach sytuacyjnych zakładanych w celu zagęszczenia osnowy pomiarowej pomiary
kątowe należy wykonać w taki sposób ażeby średni błąd:
)
(180
60
m
cc
''
0
≤
- dla ciągów o długości do 1,2 km,
)
(90
30
m
cc
''
0
≤
- dla ciągów o długości większej od 1,2 km.
Dopuszczalne odchyłki f
stabelaryzowane są w Instrukcji G-4 [11 ] zał. 2 str. 68.
dop
β
Jeżeli warunek (6.87) jest spełniony, to można przystąpić do rozrzucenia odchyłki
kątowej; przy czym wymieniona instrukcja dopuszcza możliwość przekroczenia wartości f
dla około 30% ciągów. W tym przypadku odchyłka nie może jednak przekroczyć podwójnej
wartości
.
dop
β
dop
f
β
Poprawki do poszczególnych ciągów powinny spełniać warunek:
0
f
v
.
.
.
v
v
n
2
1
=
+
+
+
+
β
β
β
β
(6.89)
przy założeniu
0
n
2
1
m
m
.
.
.
m
m
=
=
=
=
β
β
β
można przyjąć
i
n
2
1
v
v
.
.
.
v
v
β
β
β
β
=
=
=
=
stąd z równania warunkowego (6.89) wynika, że
0
f
v
n
i
=
+
⋅
β
β
a zatem
n
f
v
i
β
β
−
=
(6.90)
Z wzoru (6.90) wyprowadzamy wniosek, że w ciągu poligonowym odchyłkę kątową
rozrzuca się w formie jednakowej poprawki na każdy pomierzony kąt ze znakiem
przeciwnym do znaku odchyłki, a więc
2
i
i
v
+
β
=
β
i
β
gdzie
i
β - kąt wyrównany
Poprawki wpisuje się kolorem czerwonym w formularzach obliczeniowych nad
wartościami kątów pomierzonych.
Na podstawie kątów wyrównanych wylicza się azymuty wyrównane kolejnych boków
wzorami:
- dla kątów lewych
A
(6.91)
i
= A
i-1
+
α
i
- 180
0
- dla kątów prawych
A
0
(6.92)
i
= A
i-1
-
β
i
+ 180
Obliczenie kolejnych azymutów boków wykonywane jest sukcesywnie w oparciu o
azymut boku poprzedniego, aż do kontrolnego obliczenia azymutu końcowego A
n
:
A
0
n
= A
n-1
+
α
n
- 180
lub
(6.93)
A
0
n
= A
n-1
-
β
n
+ 180
który porównujemy z wartością tegoż azymutu wyliczoną ze współrzędnych (wartość ta
wpisana jest do formularza obliczeniowego).
Mając azymuty wyrównane poszczególnych boków obliczamy przyrosty współrzędnych:
i
d
=
∆
;
i
i
cosA
X
i
i
i
sinA
d
Y
=
∆
(6.94)
które sprawdzamy wykonując obliczenia kontrolne wzorami:
X
i
C
S
Y
i
−
=
∆
(6.95)
C
S
+
=
∆
;
gdzie
(
)
0
i
i
45
A
sin
2
+
d
2
S
=
;
(
0
i
i
45
A
cos
d
2
2
C
+
=
)
(6.96)
Po obliczeniu i sprawdzeniu przyrostów sumujemy przyrosty i określamy odchyłki
[ ] [ ]
t
p
X
X
∆
−
∆
x
f
=
;
[ ] [ ]
t
p
y
Y
Y
f
∆
−
∆
=
(6.97)
2
2
x
f
f
f
+
=
(6.98)
y
L
gdzie
[
∆X]
p
, [
∆Y]
p
ch,
pomierzony
elementów
z
ych
wyznaczon
przyrostów
sumy
-
[
∆X]
t
, [
∆Y]
t
przyrostów
suma
na
teoretycz
-
∆X
t
= X
n
– X
1
3
(6.99)
∆Y
t
= Y
n
– Y
1
Sprawdzamy warunek
.
Ldop
L
≤
(6.100)
f
f
gdzie
(
)(
)
2
2
2
0
2
Ldop
c
L
n
12
2
n
1
n
m
L
+
+
+
ρ
.
u
f
+
=
(6.101)
L – długość ciągu,
u – współczynnik błędów przypadkowych pomiaru liniowego,
m
o
– średni błąd pomiaru kąta,
n – liczba boków w ciągu,
c = 0,10 – wpływ błędów położenia punktów nawiązania.
Należy zwrócić uwagę, że wzór (6.101) został podany dla odległości mierzonych
przymiarami wstęgowymi. Gdy pomiar długości boków poligonowych wykonywany jest
dalmierzami elektronicznymi wówczas w tym wzorze u
2
L należy zastąpić na
2
+ 2a
⋅b⋅10
-6
L.
Oznaczenia: a oraz b, są elementami występującymi we wzorze na średni błąd standardowy
pomiaru odległości dalmierzem elektronicznym
(
)
L
10
b
a
m
6
l
−
⋅
+
±
=
(6.102)
gdzie:
a – parametr o charakterze stałym w [mm]
b – współczynnik błędów zależnych od odległości l w [km].
Dla około 30% ciągów może być spełniony warunek
Ldop.
L
f
≤
(6.103)
2
f
Wartości odchyłki f
stabelaryzowane są w Instrukcji G-4 [11 ] zał. 3.
.
Ldop
Jeśli warunek (6.100) i (6.103) są spełnione to można przystąpić do rozrzucenia odchyłki
f
x
i f
y
0
na poszczególne przyrosty, w formie poprawek
i
i
x
v
∆
i
y
v
∆
Poprawki te powinny spełniać warunek:
v
v
1
f
v
.
.
.
x
x
x
x
1
-
n
2
=
+
+
+
+
(6.104)
∆
∆
∆
oraz
v
v
2
0
f
v
.
.
.
x
y
y
y
1
-
n
1
=
+
+
+
+
(6.105)
∆
∆
∆
Poszczególne przyrosty wyznaczone są z różnymi błędami średnimi. A zatem posiadają
też różne wagi. W związku z tym wyznaczenie poprawek poszczególnych przyrostów
wymagałoby rozwiązania równań warunkowych (6.104) i (6.105) z uwzględnieniem wag.
4
Średnie błędy przyrostów wyznaczymy na podstawie formy funkcji (6.94) przy założeniu,
że azymuty wyrównane w zaniedbywanym stopniu wpływają na wartości odchyłek f
x
i f
y
,
zatem
i
m
cos
m
=
;
i
d
i
X
A
∆
i
d
i
i
Y
m
A
sin
m
=
∆
(6.106)
Wagi definiowane są ogólnym wzorem
2
i
2
0
i
m
m
p
=
Przyjmując m
o
= 1 otrzymamy w rozpatrywanym przypadku
2
i
d
i
2
i
X
m
A
cos
∆
1
p
=
;
2
i
d
i
2
i
Y
m
A
sin
1
p
=
∆
(6.107)
Ze ścisłego rozwiązania równań warunkowych (6.104) i (6.105) z uwzględnieniem wag
wynika, że:
∑
−
=
−
∆
1
n
1
j
1
Xj
x
x
p
=
f
k
;
∑
−
=
−
∆
=
1
n
1
j
1
j
Y
y
y
p
f
k
(6.108)
stąd
x
1
n
1
j
1
Xj
1
i
X
x
1
X
i
X
f
p
p
p
∑
−
=
−
∆
−
∆
−
∆
∆
−
=
i
k
v
⋅
−
=
;
y
1
n
1
j
1
Yj
1
i
Y
y
1
i
Y
i
Y
f
p
p
k
p
v
∑
−
=
−
∆
−
∆
−
∆
∆
−
=
⋅
−
=
(6.109)
gdzie
1
m
A
cos
p
=
;
2
i
d
i
2
i
X
−
∆
2
i
d
i
2
1
i
Y
m
A
sin
p
=
−
∆
(6.110)
zatem
x
1
n
1
j
2
j
d
j
2
2
i
d
i
2
X
f
m
A
cos
m
A
cos
∑
−
=
∆ i
V
−
=
;
y
1
n
1
j
2
j
d
j
2
2
i
d
i
2
i
Y
f
m
A
sin
m
A
sin
V
∑
−
=
∆
−
=
(6.111)
Należy zaznaczyć, że wzory (6.111) są ogólną formą wzorów na wyznaczenie poprawek
przy przybliżonym wyrównaniu ciągów poligonowych.
Dla pomiarów odległości wykonywanych przymiarami wstęgowymi, na przykład w
wyrobiskach górniczych, można przyjąć
i
d
u
m
=
(6.112)
i
d
Wprowadzając (6.112) do wzorów (6.111) otrzymamy
x
1
n
1
j
j
2
j
i
2
X
f
A
cos
d
A
∑
−
=
∆
i
i
cos
d
V
−
=
;
y
1
n
1
j
j
2
j
i
2
i
i
Y
f
A
sin
d
A
sin
d
V
∑
−
=
∆
−
=
(6.113)
lub uwzględniając związki (8.94) dojdziemy do postaci
5

x
1
n
1
j
j
j
i
X
f
A
cos
X
A
X
∑
−
=
∆
∆
i
i
cos
V
∆
−
=
;
y
1
n
1
j
j
j
i
i
i
Y
f
A
sin
Y
A
sin
Y
V
∑
−
=
∆
∆
∆
−
=
(6.114)
Dla wszystkich poprawek określonego ciągu wyrażenia
x
1
n
1
j
j
j
q
A
cos
X
∆
∑
−
=
x
f
=
;
y
1
n
1
j
j
j
y
q
A
sin
Y
f
=
∆
∑
−
=
(6.115)
są stałe stąd można napisać
i
i
cos
V
∆
−
=
;
i
x
X
A
X
q
∆
i
i
y
i
Y
A
sin
Y
q
V
∆
−
=
∆
(6.116)
Z wyprowadzonych wzorów wynika, że wartość poprawek przyrostów zależy między
innymi od azymutu boku dla którego poprawki do przyrostów są liczone.
Dla ciągu prostoliniowego można przyjąć
A
A
2
1
A
A
.
.
.
1
-
n
≈
≈
≈
≈
(6.117)
stąd
A
cos
A
cos
A
cos
A
cos
.
.
.
1
-
n
2
1
≈
≈
≈
≈
(6.118)
oraz
A
sin
A
sin
A
sin
A
sin
.
.
.
1
-
n
2
1
≈
≈
≈
≈
Uwzględniając te założenia we wzorach (6.113) oraz (6.114) otrzymamy
x
1
n
1
j
j
X
d
∑
−
=
∆
i
i
f
d
V
−
=
;
y
1
n
1
j
j
i
i
Y
f
d
d
V
∑
−
=
∆
−
=
(6.119)
oraz
x
1
n
1
j
j
i
X
f
X
X
∑
−
=
∆
∆
i
V
∆
−
=
;
y
1
n
1
j
j
i
i
Y
f
Y
Y
V
∑
−
=
∆
∆
∆
−
=
(6.120)
Otrzymaliśmy wzory, które powszechnie są stosowane w praktyce geodezyjnej. Różne
wyrażano poglądy w publikacjach, w sprawie stosowania formy (6.119) lub (6.120). Na
podstawie dokonanego wyprowadzenia można stwierdzić, że obie formy są jednakowo
słuszne ale tylko przy założeniu prostoliniowego przebiegu ciągu.
Dla przyjętego założenia obie formy są także równoważne gdyż do postaci (6.120)
możemy dojść podstawiając we wzorach (6.119) za d
i
:
i
i
A
cos
X
i
d
∆
=
lub
i
i
i
A
sin
Y
d
∆
=
W przypadku pomiaru odległości dalmierzem elektromagnetycznym przyjmuje się
najczęściej, że średnie błędy pomiaru są jednakowe, czyli
6
m
m
d
1
-
n
d
2
d
1
d
m
m
.
.
.
=
=
=
=
Uwzględniając to założenie we wzorach (6.111) otrzymamy
x
1
n
1
j
j
2
i
2
X
f
A
cos
∑
−
=
∆ i
A
cos
V
−
=
;
y
1
n
1
j
j
2
i
2
i
Y
f
A
sin
A
sin
V
∑
−
=
∆
−
=
(6.121)
lub przyjmując
x
1
n
1
j
j
2
A
cos
∑
−
=
x
h
f
=
;
y
1
n
1
j
j
2
y
h
A
sin
f
=
∑
−
=
(6.122)
dojdziemy do postaci
i
cos
V
−
=
;
i
2
x
X
A
h
∆
i
2
y
i
Y
A
sin
h
V
−
=
∆
(6.123)
Przyjmując założenia (6.117) i (6.118) słuszne dla prostoliniowego przebiegu ciągu
otrzymamy na podstawie wzorów (6.121)
1
n
X
−
∆
f
V
x
i
−
=
;
1
n
f
V
y
i
Y
−
−
=
∆
(6.124)
Wynika stąd wniosek, że odchyłki sum przyrostów w ciągach o przebiegu
prostoliniowym w których pomiar odległości wykonywany był dalmierzem
elektromagnetycznym można by rozrzucać jednakowo na każdy przyrost.
Po obliczeniu poprawek
wybranymi wzorami sprawdzamy czy spełniają one
równania warunkowe (6.104) i (6.105).
Y
X
V
i
V
∆
∆
Poprawki wpisywane są do formularza obliczeniowego kolorem czerwonym nad
poszczególnymi przyrostami z dokładnością zapisu przyrostów.
Współrzędne wyrównane poszczególnych punktów liczone są wzorami:
1
i
i
X
−
−1
i
X
X
∆
+
=
1
i
i
i
Y
−
−1
Y
Y
∆
+
=
(6.125)
gdzie
1
-
i
1
i
Y
,
X
∆
∆
−
- przyrosty wyrównane.
Kontrole obliczenia współrzędnych stanowi wyliczenie współrzędnych n-tego punktu
wzorem
n
1
n
1
n
n
X
X
=
−
−
X
X
∆
+
=
n
1
n
1
n
n
Y
Y
=
−
−
Y
Y
∆
+
=
(6.126)
i porównanie wyników ze współrzędnymi X
n
, Y
n
- danymi katalogowymi tego punktu.
B. Przykład
7
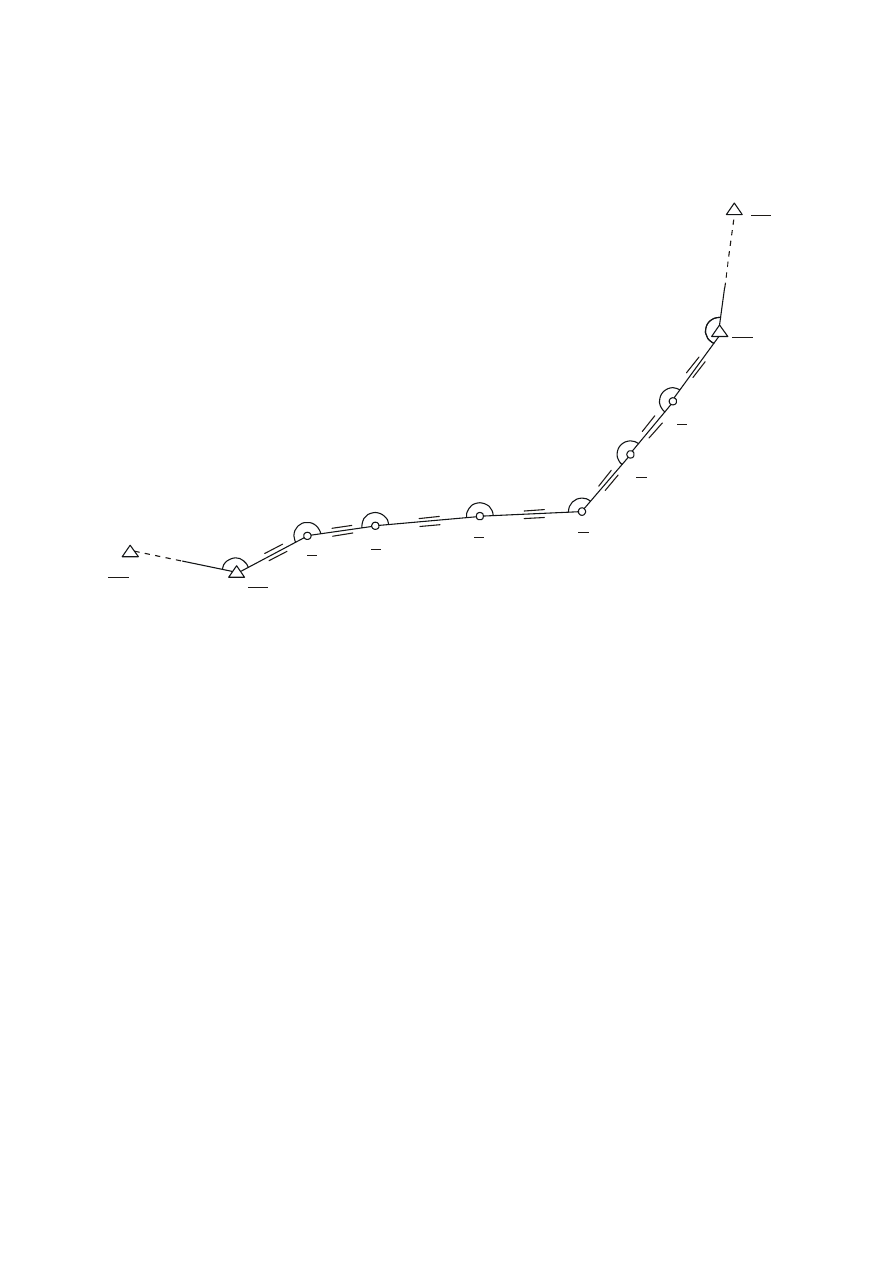
Obliczyć i wyrównać ciąg poligonowy dwustronnie dowiązany – przedstawiony na
rysunku 8.39 w którym odległości pomierzono przymiarem wstęgowym. Poprawki do
przyrostów należy obliczyć tradycyjnymi wzorami (6.119).
54
58
1
2
3
4
5
6
74
86
Rys. 6.39 Szkic ciągu sytuacyjnego do przykładu obliczeniowego
Realizacja
Dane do obliczeń i wyniki obliczeń zestawiono w tabeli 6.6.
8
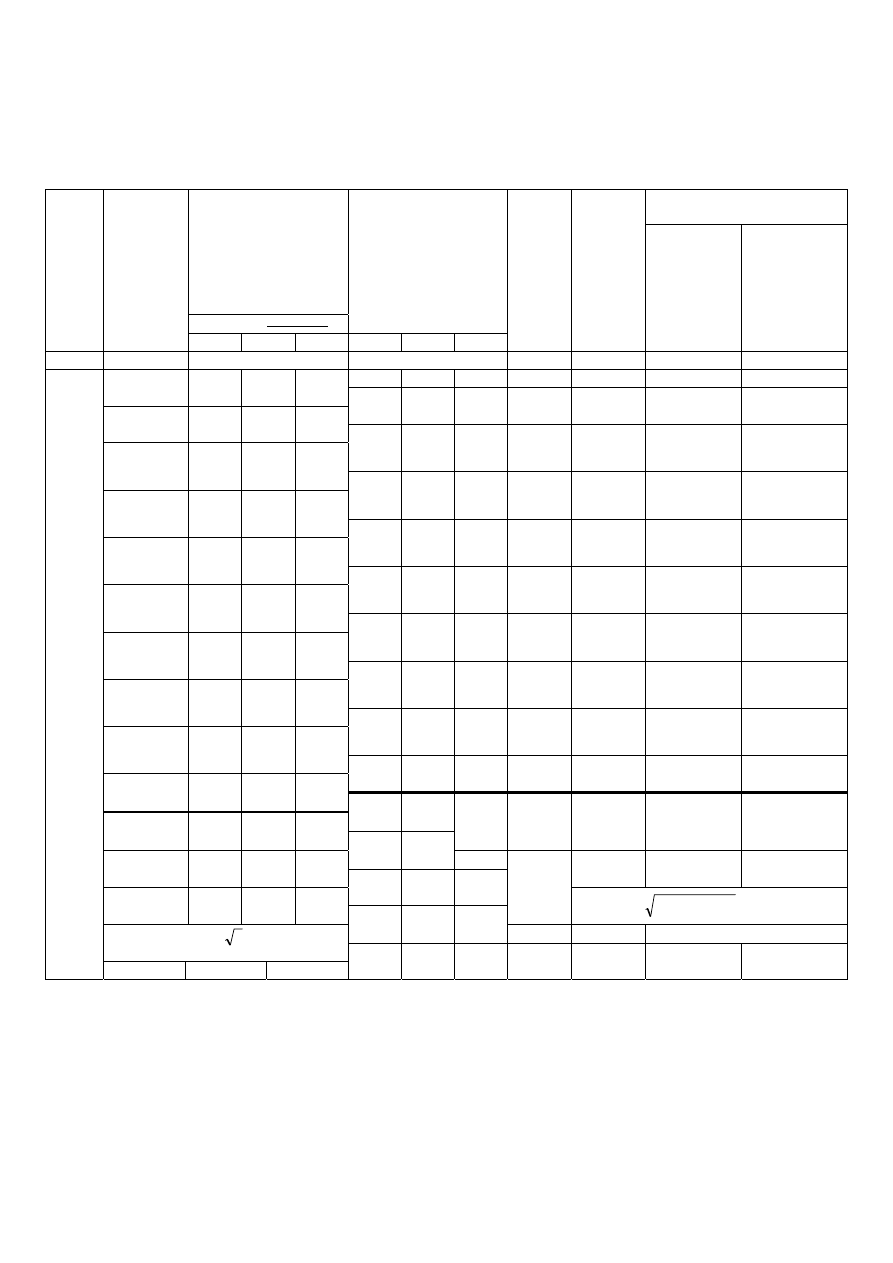
Tabela 6.6
Część I
Przybliżone obliczenie i wyrównanie ciągu sytuacyjnego obustronnie dowiązanego
Azymuty
Przyrosty
180
0
A
t
= A
t-1
+
α -
200
g
180
0
Średnie wartości kątów
Poprawki
A
t
= A
t-1
-
β +
200
g
α - lewe β - prawe
Numer
ciągu
Numery
punktów
nawiązania
poligono-
g
c
cc
g
c
cc
Zredu-
kowane
boków l
CosA
t
SinA
t
∆x =
t
∆y =
t
1
2
3
4
5
6
7
8
54
100
72
85
58
167
90
-10
40
0,473 038
68
63
15
172,80
0,881 042
+1
81,74
152,24
1
220
94
-10
77
89
57
82
140,04
0,162 975
0,986 630
+2
22,82
138,17
2
199
87
-10
82
89
45
54
227,26
0,164 878
0,986 314
+2
37,47
+1
224,15
3
207
97
-11
58
97
43
01
273,39
0,040 357
0,999 185
+2
11,03
+1
273,17
4
150
77
-10
42
48
20
33
246,85
0,726 779
0,686 872
+2
179,40
169,55
5
199
52
-10
02
47
72
25
223,51
0,731 946
0,681 363
+2
163,60
152,29
6
200
46
-10
92
48
19
07
277,40
0,726 915
0,686 728
+2
201,65
190,50
74
170
82
-10
52
19
01
49
86
Σα
p
=
1518
29
45
[ l ] 1561,25
[
∆x]
p
= 697,71
[
∆x]
t
= 697,84
[
∆y]
p
= 1300,07
[
∆y]
t
= 1300,09
Σα
t
=
1518
28
64
f
f
y
= -0,02
f
α
=
+
81
m
13
,
0
02
,
0
13
,
0
f
2
2
l
±
=
+
=
f
l dop
=
±0,34 m
cc
c
cc
55
2
8
90
f
dop
=
=
α
x
= -0,13
l sinA
l cosA
długości
wych
i punktów
9
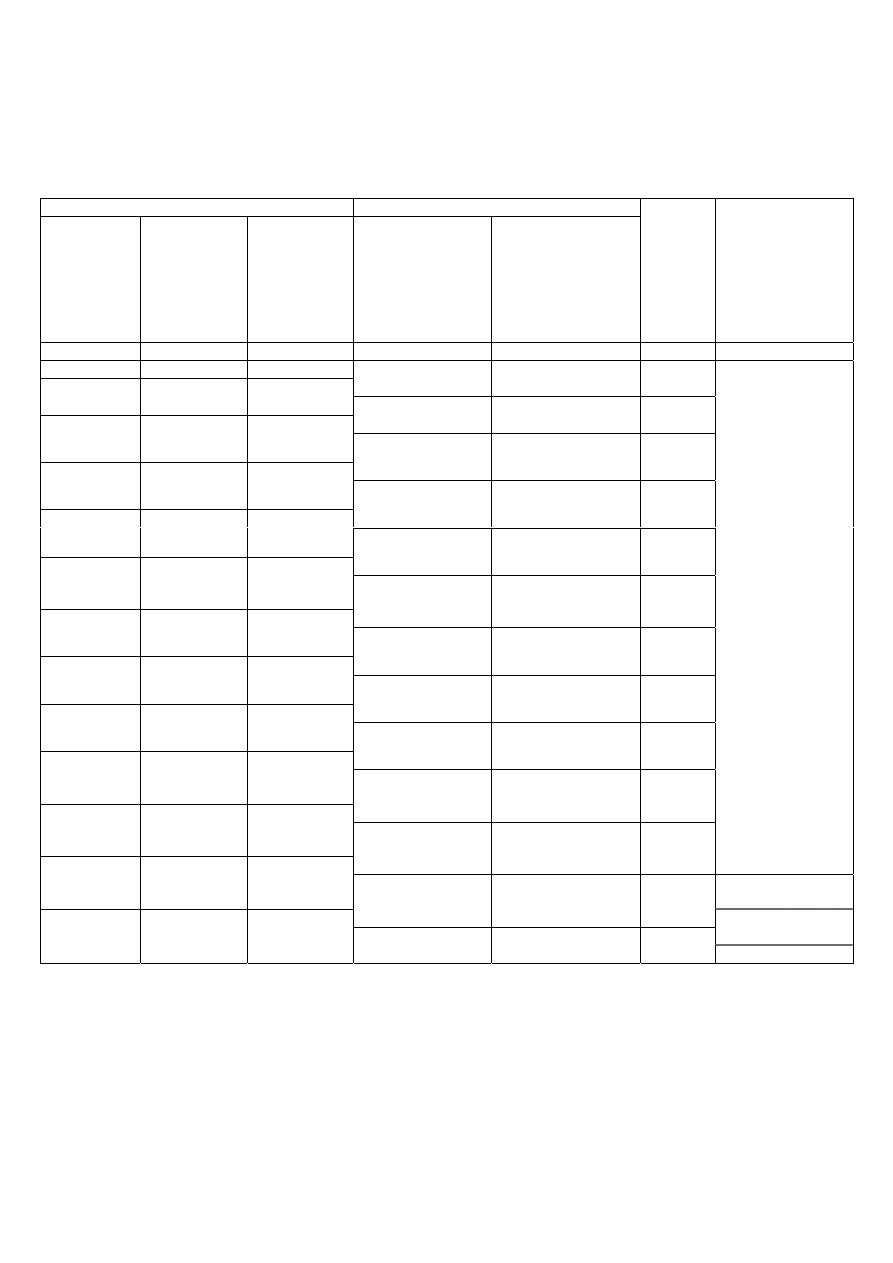
Tabela 6.6 cd.
Część II
Przybliżone obliczenie i wyrównanie ciągu sytuacyjnego obustronnie dowiązanego
Obliczenia kontrolne
Współrzędne
sin(A+50
g
)
0,7071
⋅ l
cos(A+50
g
)
s
c
∆x
’
= s+c
∆y
’
= s-c
X
Y
Numer
punktu
Obliczenia
U W A G I
9
10
11
12
13
14
15
3 933,42
6 510,87
54
3899,09
9 510,67
58
0,957 479
122,19
-0,288 503
116,99
-35,25
81,74
152,24
3 980,84
9 662,91
1
0,812 894
99,02
-0,582 412
80,49
-57,67
22,82
138,16
4 003,68
9 801,08
2
0,814 016
160,70
-0,580 843
130,81
-93,34
37,47
224,15
4 041,17
10 025,24
3
0,735 067
193,31
-0,677 994
142,10
-131,06
11,04
273,16
4 052,22
10 298,42
4
0,999 602
174,55
0,028 219
174,48
4,92
179,40
169,55
4 231,64
10 467,97
5
0,999 360
158,04
0,035 767
157,94
5,65
163,59
152,29
4 395,26
10 620,26
6
0,999 596
196,15
0,028 416
196,07
5,57
201,64
190,50
4 596,93
10 810,76
74
7 464,10
11 693,55
86
Obliczył
Zofia Biedroń
imię i nazwisko
1987 - 05 - 05
data i podpis
pomocnicze
10
Wyszukiwarka
Podobne podstrony:
obliczenia do projektu czyjeś
Obliczenia do programu podstawowego sygnalizacji trójfazowej
Obliczenia do sprzegla Ł O
Obliczenia do Projektu
Obliczenia do kotłownMareki
obliczenia do ćw 26
obliczenia do laborek 1 cz1
Obliczenia do Nr i Noc
Obliczenia do sprzegla Sz P
tabela z obliczeniami do projektu 2
OBLICZENIA do projektu
OBLICZENIA do licznika
Obliczenia do?
Obliczenia do Projektu 70H7 e8, POLITECHNIKA WARSZAWSKA
obliczenia do sprawozdania bez czerwonego
Obliczenia do sprawka by P, Mechanika i Budowa Maszyn PWR MiBM, Semestr I, Fizyka, laborki, sprawozd
OBLICZENIA DO WYIESIENIA PROJEKTU W TERENIE, studia, rok III, geo inż, od Marzeny
więcej podobnych podstron