
1
Ćwiczenie 14
Wyznaczenie współczynnika tarcia tocznego
I. Zagadnienia do samodzielnego opracowania
1.
Tarcie statyczne i dynamiczne.
2.
Ruch obrotowy bryły sztywnej.
3.
Ruch harmoniczny tłumiony.
II. Wprowadzenie
Zjawisko wyst
ępowania oporów podczas ruchu ciała stałego nazywamy tarciem.
Tarcie pojawia si
ę przy poruszaniu się ciała w cieczy lub gazie i wtedy nazywamy je
tarciem wewn
ętrznym (lepkością), jak również przy kontakcie ciała z powierzchnią
innego ciała stałego (tarcie zewn
ętrzne), a wtedy w zależności od tego, czy ciała
przylegaj
ą bez ruchu, ślizgają się lub toczą jedne po drugich, mówimy o tarciu
przylegania, tarciu przy po
ślizgu i tarciu przy toczeniu.
Siła tarcia wewn
ętrznego (oporu lepkiego) jest przeciwnie skierowana do
pr
ędkości ruchu ciała i zależy od lepkości cieczy oraz rozmiaru i kształtu ciała oraz od
warto
ści prędkości, do której jest wprost proporcjonalna:
v
b
F
o
−
=
,
(1)
gdzie b jest współczynnikiem oporu lepkiego, zale
żnym od lepkości cieczy oraz
rozmiaru i kształtu ciała.
Tarcie zewn
ętrzne polega na powstawaniu oporu w płaszczyźnie zetknięcia,
podczas ruchu wzgl
ędnego dwóch stykających się ciał.
Wyró
żniamy siłę tarcia przy poślizgu, występującą podczas ruchu względnego
dwóch stykaj
ących się powierzchni, która jest proporcjonalna do nacisku ciała na
podło
że N.
N
f
T
k
k
=
(2a)
oraz sił
ę oporu przylegania, czyli siłę tarcia statycznego, występującą, gdy nie ma ruchu
wzgl
ędnego dwóch stykających się powierzchni, której wartość wynika z warunków
ruchu ciała (I lub II zasada dynamiki), ale która nie mo
że przekroczyć wartości
granicznej
gr
T
gr
s
T
T
≤
, gdzie
N
f
T
s
gr
=
(2b)
gdzie:
k
f - kinetyczny współczynnik tarcia (bezwymiarowy),
s
f - statyczny współczynnik tarcia (bezwymiarowy).
Z do
świadczenia wiadomo, że
k
s
f
f
>
. Współczynniki tarcia w pierwszym
przybli
żeniu nie zależą od siły nacisku na podłoże, ale zależą od rodzaju powierzchni
stykaj
ących się (gładkość powierzchni, temperatura, wilgotność, zanieczyszczenia).
Z zale
żności (2a) i (2b) widać, że obie siły tarcia zewnętrznego nie zależą od wielkości
stykaj
ących się powierzchni, a siła tarcia przy poślizgu nie zależy od prędkości poślizgu
(takie tarcie nazywamy tarciem suchym).
Podczas toczenia si
ę ciał występuje tarcie toczne. Toczenie jest złożeniem ruchu
post
ępowego i obrotowego. W dynamice ruchu obrotowego wielkościami
analogicznymi do sił s
ą momenty sił. Dlatego analogiem siły tarcia jest tutaj moment
2
siły tarcia
t
M . Tarcie toczne mo
żna scharakteryzować poprzez współczynnik tarcia
tocznego
f
t
:
N
f
M
t
t
=
(3)
gdzie:
M
t
- moment siły tarcia,
f
t
- współczynnik tarcia tocznego (maj
ący wymiar metra),
N - siła nacisku ciała na podło
że (obciążenie normalne).
Warto
ść współczynnika tarcia tocznego zależy od rodzaju materiałów,
chropowato
ści powierzchni, temperatury.
Na wst
ępie rozpatrzmy toczącą się po płaszczyźnie poziomej kulę o masie m i
promieniu
r, na któr
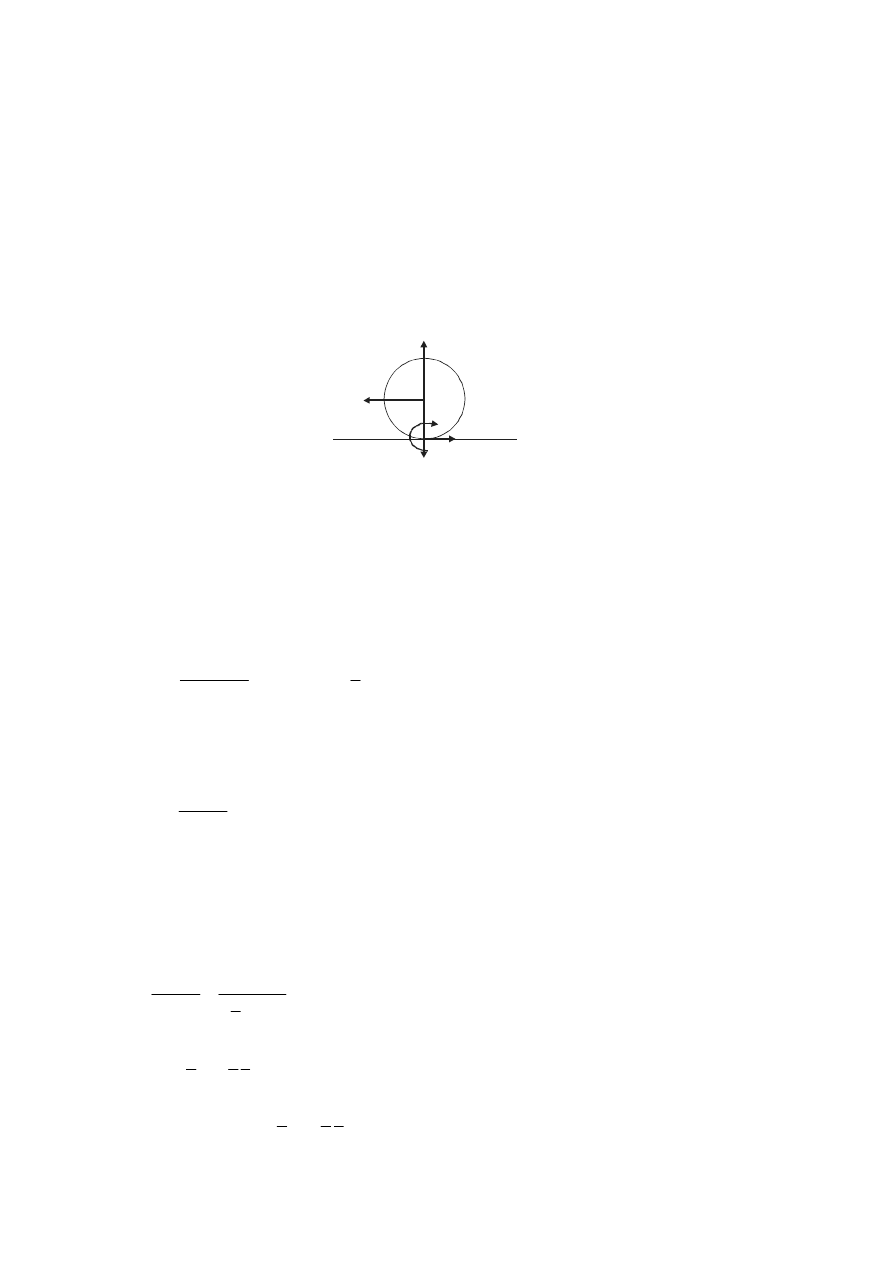
ą działa zewnętrzna pozioma siła F (rys.1).
.
Q
F
F
R
M
t
T
s
Rys. 1. Siły i momenty sił działaj
ące na toczącą się kulę
Z warunku równowagi sił w pionie wynika,
że pionowa siła reakcji podłoża F
R
jest równa sile ci
ężkości
mg
Q
F
R
=
=
. Z równania (3) otrzymujemy warto
ść momentu
tarcia tocznego
mg
f
F
f
M
t
R
t
t
=
=
. Siła
F, je
żeli jest wystarczająco duża, zapewnia
ruch przy
śpieszony środka masy kuli oraz przyśpieszony ruch obrotowy kuli. Ze
wszystkich sił tylko siła
F daje niezerowy moment wzgl
ędem punktu styku z podłożem i
dlatego przy
śpieszenie kątowe wyznaczone dzięki II zasadzie dynamiki dla ruchu
obrotowego jest równe:
J
M
rT
t
s
−
=
ε
,
2
5
2
mr
J
=
gdzie
J jest momentem bezwładno
ści kuli.
Na ruch post
ępowy środka masy kuli, oprócz siły F, wpływa także pozioma siła
reakcji podło
ża T
s
(siła tarcia statycznego). Dlatego II zasada dynamiki dla ruchu
post
ępowego ma postać
m
T
F
a
s
−
=
Je
żeli założymy, że nie występuje poślizg (
N
f
T
T
s
gr
s
=
<
), to ruch post
ępowy musi
by
ć „dopasowany” do ruchu obrotowego w tym sensie, że obowiązuje zależność między
przy
śpieszeniem liniowym i kątowym
r
a
ε
=
Dopasowanie to jest mo
żliwe dzięki odpowiedniej wartości siły tarcia statycznego T
s
.
Zestawiaj
ąc powyższe równania
r
mr
M
rT
m
T
F
t
s
s
2
5
2
−
=
−
mo
żna wyznaczyć wartość siły tarcia statycznego:
t
r
s
M
F
T
1
7
5
7
2
+
=
(4)
Siła wypadkowa działaj
ąca na kulę jest zatem równa:
t
r
s
w
M
F
T
F
F
1
7
5
7
5
−
=
−
=
(5)
3
Otrzymane wyra
żenie na siłę wypadkową jest praktyczne, tzn. po podzieleniu przez
mas
ę można bezpośrednio obliczyć przyśpieszenie środka kuli.
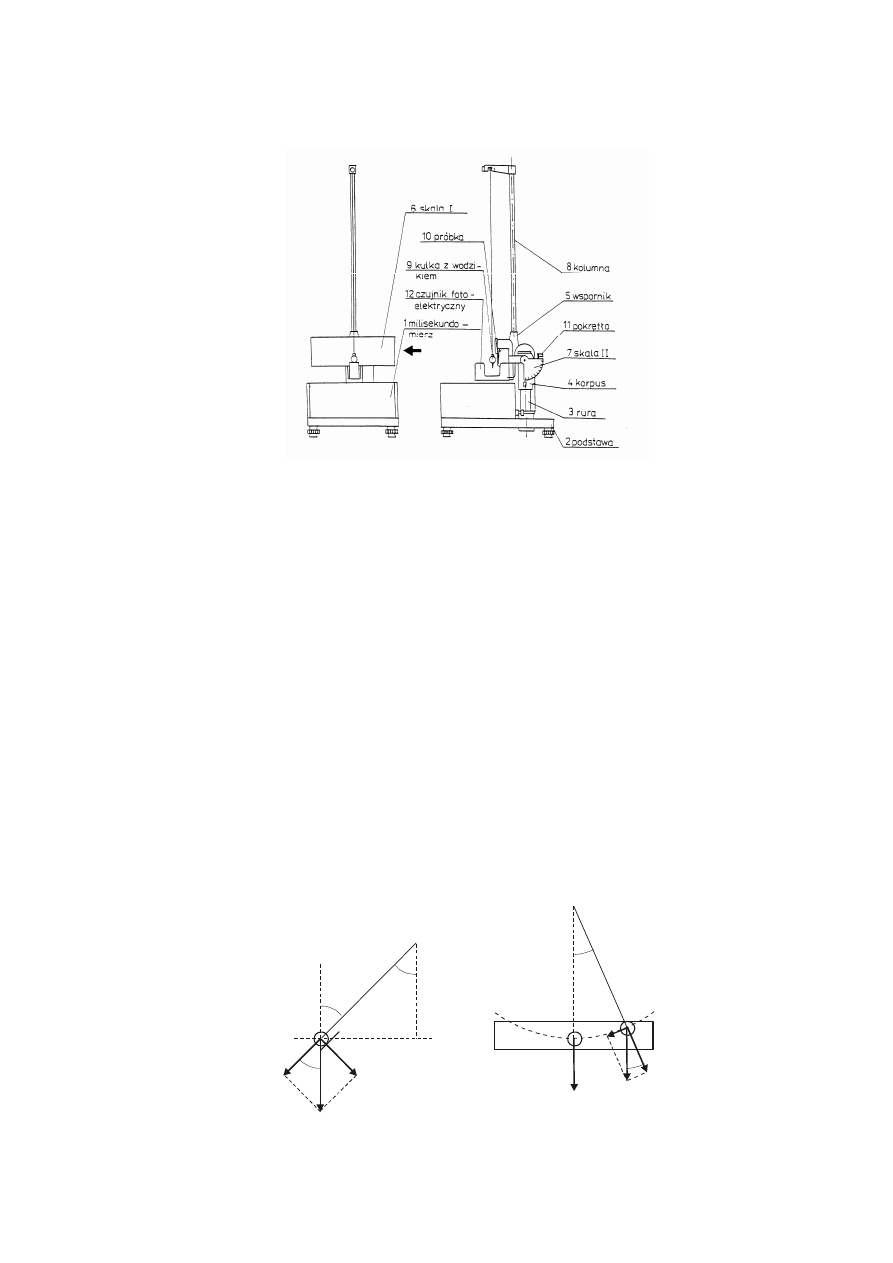
Rys. 2. Schemat pomiarowy do wyznaczania współczynnika tarcia tocznego
Układ pomiarowy przedstawiony jest na rys. 2. Zasadniczym elementem
przyrz
ądu jest wahadło nachylne składające się z nici, do której zamocowana jest kulka
z wodzikiem (9) oraz wspornik (5), gdzie po prowadnicach wsuwa si
ę badaną próbkę
(10), czyli metalow
ą płytkę, po której toczy się kulka. Pokrętło (11) służy do pochylenia
kolumny (8) wahadła wraz z płytk
ą (10), w celu wykonywania zasadniczych pomiarów
współczynnika tarcia tocznego. W czasie drga
ń wahadła następuje proces mierzenia
czasu po przyci
śnięciu przełącznika W2. Proces liczenia trwa do momentu przyciśnięcia
przeł
ącznika W3. W czasie pomiaru przyrząd musi być dokładnie wypoziomowany przy
pomocy nó
żek o regulowanej wysokości. Do pomiaru średnicy kulki użyć suwmiarki
lub
śruby mikrometrycznej.
Wyprowad
źmy wzór, z którego będziemy mogli wyznaczyć współczynnik tarcia
tocznego. W tym celu skorzystamy z zastosowanego w
ćwiczeniu wahadła nachylnego
(kulki z wodzikiem 9) o ci
ężarze Q, które pochylone jest pod kątem
β
wzgl
ędem pionu
(rys. 3a). Na podstawie rozkładu sił otrzymamy składow
ą ciężaru wahadła wzdłuż
kierunku najwi
ększego spadku na płaszczyźnie próbki
s
Q i składow
ą prostopadłą do tej
płaszczyzny
w
Q :
β
cos
Q
Q
s
=
(6)
β
sin
Q
Q
w
=
(7)
α
α
Q
s
Q
s1
Q
s2
Q
s
β
β
Q
w
Q
s
Q
β
a)
b)
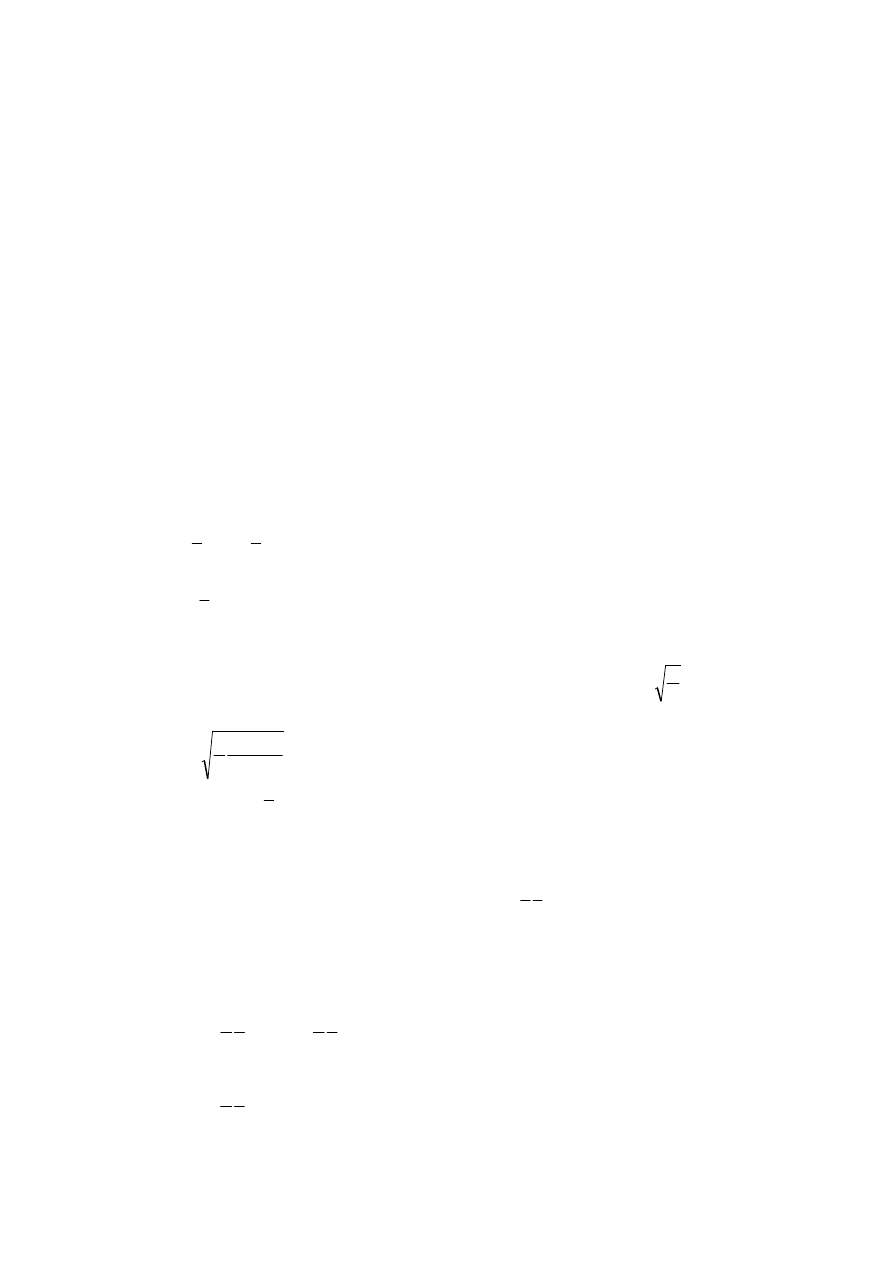
4
Rys. 3. Rozkład siły ci
ężkości działającej na kulkę wahadła znajdującą się na pochylonej płaszczyźnie
Po odchyleniu wahadła (kulki 9) od poło
żenia równowagi o kąt
o
α
(rys. 3b) kulka
zaczyna toczy
ć się po badanej próbce (10) pod wpływem składowej siły
2
s
Q
. Zgodnie
z rozkładem sił otrzymamy wyra
żenie na tę składową, słuszne dla dowolnego kąta
α
:
β
α
α
cos
sin
sin
2
Q
Q
Q
s
s
=
=
dla małych k
ątów
α
α
≈
sin
, otrzymamy zatem zale
żność przybliżoną:
β
α
cos
2
Q
Q
s
=
(8)
Ze wzgl
ędu na to przybliżenie należy dążyć do tego, aby amplituda wahań
o
α
nie
przekraczała paru stopni.
Rozpatrzmy ruch obrotowy wahadła wzgl
ędem punktu zawieszenia. Wszystkie
wyznaczane poni
żej momenty sił będziemy liczyć względem tego punktu.
Składowa
w
Q jest równowa
żona przez siłę reakcji podłoża, składowa
1
s
Q nie daje
momentu siły wzgl
ędem punktu zawieszenia, widać więc, że składowa
2
s
Q
pełni rol
ę
siły zewn
ętrznej z rozpatrywanego wcześniej wstępnego przykładu z toczącą się kulą.
Gdyby tarcie toczne nie wyst
ępowało (
0
=
t
M
), to po uwzgl
ędnieniu siły tarcia
statycznego, mogliby
śmy wyznaczyć wypadkową dwóch sił
2
s
Q
i
s
T , korzystaj
ąc ze
wzorów (5) i (8):
β
α
cos
7
5
2
7
5
Q
Q
F
s
w
=
=
a na tej podstawie - moment tej siły wypadkowej wzgl
ędem punktu zawieszenia
β
α
cos
7
5
RQ
M
−
=
(9)
zale
żny od kąta wychylenia
α
i odpowiedzialny za ruch drgaj
ący wahadła nachylnego.
Przez porównanie z przypadkiem zwykłego wahadła matematycznego, gdzie
analogiczny moment siły jest równy
α
Q
R
M
−
=
, a jego okres -
g
R
T
π
2
=
, mo
żna
napisa
ć wzór na okres wahadła nachylnego:
g
R
T
β
π
cos
5
7
2
=
(10)
Współczynnik
5
7
stoj
ący w powyższym wzorze jest odbiciem faktu, że kulka
toczona pod wpływem jakiej
ś siły będzie miała mniejsze przyśpieszenie, niż nie
obracaj
ące się ciało o tej samej masie.
Dodajmy teraz do rozwa
żań ruchu kulki tarcie toczne. Ze wzoru (5) widać, że siła
wypadkowa działaj
ąca na kulkę zmniejszy się o wartość
t
r
M
1
7
5
, (bo o tyle zwi
ększy się
siła tarcia statycznego, przeciwstawiaj
ąca się ruchowi). Wartość tę można traktować
jako sił
ę hamującą, skierowaną przeciwnie do kierunku ruchu wahadła, wynikającą
z istnienia momentu tarcia tocznego
t
M . Moment tej siły wzgl
ędem punktu
zawieszenia jest równy:
N
f
r
R
M
r
R
M
t
t
h
1
7
5
1
7
5
=
=
a po podstawieniu siły
w
Q , danej wzorem (7), za sił
ę nacisku N, otrzymujemy:
β
sin
1
7
5
Q
f
r
R
M
t
h
=
(11)
5
Ten stały, co do warto
ści hamujący moment siły, skierowany jest przeciwnie do
kierunku obrotu wzgl
ędem punktu zawieszenia. Podczas ruchu wahadła w lewo moment
hamuj
ący jest skierowany w prawo i dlatego spowoduje on przesunięcie położenia
równowagi wahadła w prawo o k
ąt
ε
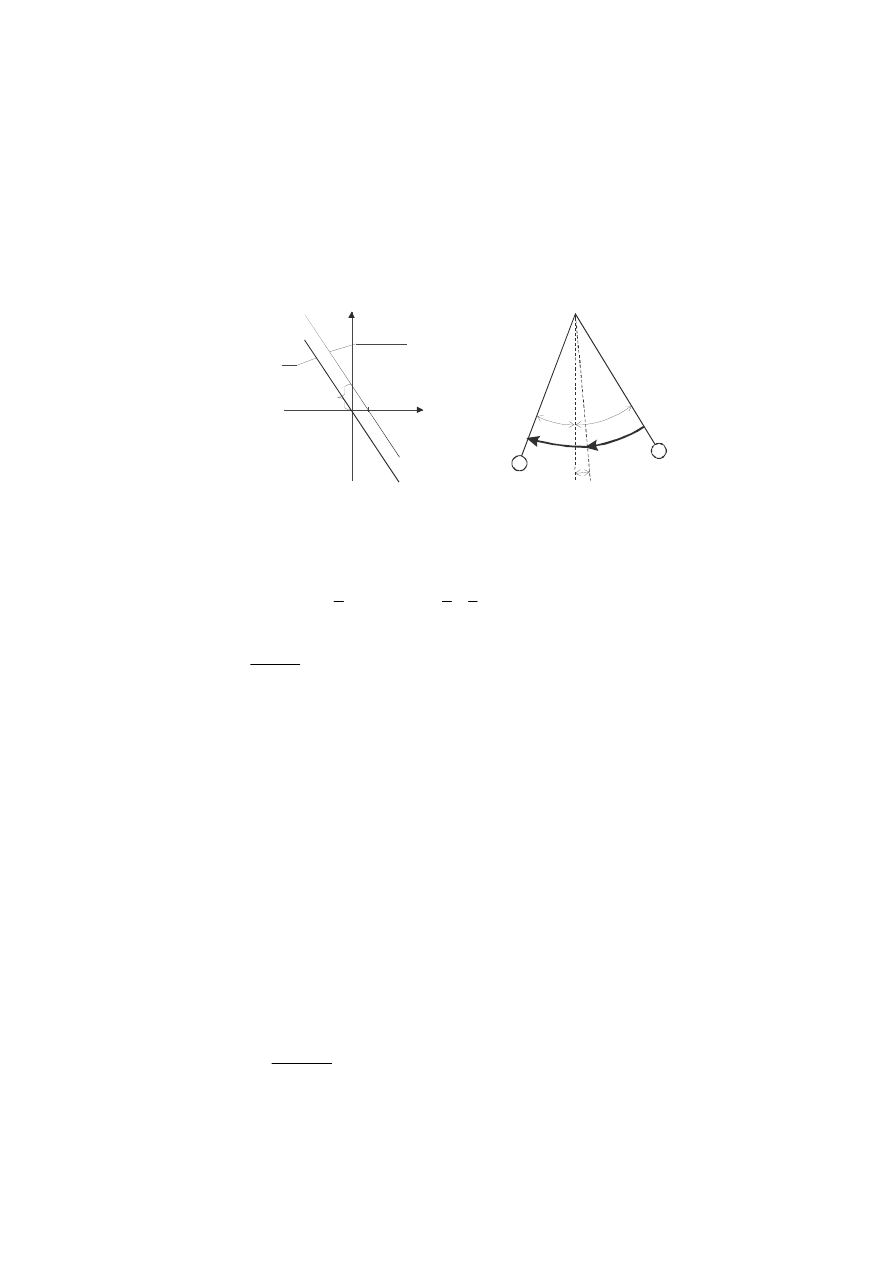
, co wynika z wykresu na rys. 4. Na wykresie tym,
przedstawiaj
ącym zależność momentów sił od kąta obrotu, momenty sił kierujące kulkę
w prawo s
ą dodatnie. Widać, że dopóki kulka nie zmienia kierunku, jej ruch podlega
tym samym prawom, co zwykły ruch drgaj
ący (bez tarcia), pod wpływem wypadkowego
momentu siły
w
M proporcjonalnego do wychylenia
ε
α
−
z poło
żenia równowagi
ε
α
=
(rys. 4).
ε
α−ε
0
α−ε
0
α−2ε
0
b)
α
0
α
ε
a)
M=M+M
w
h
M
M
M
h
Rys. 4. Wychylenie w lewo: a)momenty sił działaj
ące na wahadło, b) schemat ruchu
Przesuni
ęcie kątowe położenia równowagi wahadła można obliczyć z warunku
równowagi momentów
żądając, aby w tym położeniu moment wypadkowy był równy
zeru
0
sin
cos
1
7
5
7
5
=
+
−
=
+
=
β
β
α
Q
f
R
RQ
M
M
M
t
r
h
w
z czego dostajemy k
ąt równowagi:
r
f
t
β
ε
α
tg
=
≡
(12)
Na rys. 4 przedstawiono ruch wahadła w lewo, po wychyleniu w prawo o k
ąt
α
o
od linii najwi
ększego spadku na pochyłej płytce (linia ta widoczna jest na rysunku jako
linia pionowa). Wida
ć, że ruch jest symetryczny wokół chwilowego położenia
równowagi
ε
α
=
, a amplituda jest równa
ε
α
=
0
α
. Powoduje to jednak,
że największe
wychylenie kulki w lewo, licz
ąc od linii największego spadku, będzie równe
ε
α
2
0
−
.
Po osi
ągnięciu tego największego wychylenia kulka zaczyna poruszać się w prawo,
a wtedy moment hamuj
ący
h
M
, wynikły z tarcia tocznego, szybko zmienia kierunek, co
powoduje ustalenie si
ę nowego położenia równowagi
ε
α
−
=
. Dlatego ruch w prawo
jest analogiczny do poprzedniej fazy ruchu, a najwi
ększe wychylenie w prawo, licząc od
linii najwi
ększego spadku, zmniejsza się znów o kąt
ε
2
, co daje ł
ączną zmianę o kąt
ε
4
, w porównaniu z pocz
ątkowym wychyleniem
ε
α
α
4
1
0
=
−
.
Dalej ruch przebiega podobnie i dla n-tego maksymalnego wychylenia zachodzi:
)
4
(
0
ε
α
α
n
n
=
−
(13)
Wyznaczaj
ąc z tej zależności
ε
i podstawiaj
ąc do równania (12), dostajemy wzór,
dzi
ęki któremu można obliczyć współczynnik tarcia tocznego
n
r
f
n
o
t
4
ctg
α
α
β
−
=
(14)
gdzie: r - promie
ń kulki w milimetrach,
α
o
- k
ąt początkowego wychylenia wahadła [rad],
α
n
- k
ąt odczytany po n „okresach” drgań wahadła [rad],
6
n
- liczba pełnych wahni
ęć,
β
- k
ąt nachylenia wahadła odczytany na skali bocznej.
Z przedstawionych powy
żej praw, jakim podlega ruch wahadła nachylnego
z uwzgl
ędnieniem tarcia tocznego, wynika też, że skoro poszczególne wahnięcia można
traktowa
ć jako swobodne, to znaczy bez tarcia tocznego, ale za to z przemieniającym się
cyklicznie poło
żeniem równowagi
ε
α
±
=
, to okres drga
ń wahadła nie zależy od
wielko
ści tarcia tocznego. Na skutek zmian położenia równowagi zmienia się tylko
amplituda wychyle
ń, a okres wahadła swobodnego nie zależy od amplitudy (dla
niewielkich wychyle
ń).
Warto zauwa
żyć, że wszystkie powyższe rozważania nie uwzględniają ruchu
precesyjnego kuli, spowodowanego zmian
ą kierunku osi obrotu kuli w trakcie ruchu
wahadła. Zmiany tego kierunku b
ędą tym mniejsze, im mniejsza będzie amplituda
waha
ń. Dlatego należy tym bardziej dążyć do tego, aby amplituda ta nie przekraczała
paru stopni.
III. Wykonanie ćwiczenia
1.
Zwróci
ć uwagę, aby próbki (płaskie płytki) i kulki były czyste.
2.
Przy pomocy regulowanych nó
żek wypoziomować przyrząd, traktując wahadło
(kulk
ę z wodzikiem 9) jako pion.
3.
Wcisn
ąć przycisk W1, klawiszem W2 sprawdzić wyzerowanie milisekundomierza.
4.
Po zamocowaniu (przez wkr
ęcenie) kulki z wodzikiem 9 i próbki 10 w prowadnicy
sprawdzi
ć, czy wodzik wahadła przecina strumień światła czujnika
fotoelektrycznego. Po przyci
śnięciu przełącznika W2 przyrząd gotowy jest do
pomiaru czasu i liczby wahni
ęć. Proces mierzenia zaczyna się w momencie, gdy
uprzednio wychylona kulka przechodzi przez poło
żenie równowagi, a kończy się po
przyci
śnięciu przełącznika W3 i przejściu przez położenie równowagi.
5.
W celu wykonania zasadniczych pomiarów pochyli
ć ramię przyrządu z próbką o kąt
o
15
=
β
, kulk
ę wychylić z położenia równowagi o kąt
0
α
około
o
6
5
÷
(odczyt
k
ąta na skali). Puścić kulkę, aby toczyła się po próbce.
6.
Milisekundomierzem mierzy
ć czas t drgań wahadła dla liczby n pełnych wahnięć
(przyjmuj
ąc na przykład
5
=
n
). Odczyta
ć także kąt
n
α
po n wahni
ęciach.
7.
Powtórzy
ć pomiar czasu t i kąta
n
α
dla innych warto
ści kątów
0
α
oraz
β
.
8.
Wykona
ć kilka serii pomiarów dla różnych kulek i próbek. Zmiany kulek dokonuje
si
ę przez wykręcenie kulki z gwintu wodzika i wkręcenie nowej.
Tabela pomiarowa
2R
β
n
0
α
n
α
T
t
t
f
t
t
f
f
∆
±
[ ]
[ ]
[ ]
[ ]
[ ]
[ ]
[ ]
[ ]
[ ]
9.
Wykona
ć obliczenia współczynnika tarcia tocznego f
s
oraz okresu waha
ń T (
n
t
T
=
)
,
dla ka
żdego badanego przypadku. Wykonać obliczenia okresu wahań T, ze
wzoru (10), dla ka
żdego kąta nachylenia
β
, jako długo
ść wahadła przyjąć R=l+r
gdzie l=0.46 m.

7
10.
Przeprowadzi
ć dyskusję błędów licząc błąd maksymalny
t
f
∆
metod
ą różniczki
zupełnej. Obliczy
ć błąd względny procentowy współczynnika tarcia. Wyniki podać
w formie:
(
)
[mm]
.
t
obl
t
t
f
f
f
∆
±
=
11.
We wnioskach porówna
ć także zależność okresu wahadła od wielkości tarcia
(mierzonego odpowiednimi współczynnikami) dla rozpatrywanego przypadku tarcia
suchego (niezale
żnego od prędkości) i dla przypadku tarcia (oporu) lepkiego (ruch
harmoniczny tłumiony).
Literatura
M. Le
śniak, Fizyka. Laboratorium, wydanie II, Oficyna Wydawnicza PRz, 2002
J. Massalski, M. Massalska, Fizyka dla in
żynierów, t.1, WNT, Warszawa 1980
R. Resnick, D. Halliday, Fizyka, t. I, PWN, Warszawa 1997
I. W. Sawieliew, Kurs Fizyki, t.1, PWN, Warszawa 1994
Wyszukiwarka
Podobne podstrony:
14(45) Proces Tworzenia oprogramowaniaid 15602 ppt
LEP BY TVN MED, Zestaw LEP - TVN MED - PEDIATRIA III, Zestaw LEP: Zestaw losowy (2008-03-29 14:45:57
14 45
ParaOrdnance P 14 45 Explosionszeichnung
14 45
WSM 16 14 45 pl
45 14
14 - Spotkanie 1 prezentacja 2, fm, 45 sekundowa prezentacja, sekrety, teczka fm
45 (14)
45 Arkuszy ćwiczeniowych Matura angielski rozmowy sterowane, Arkusz ćwiczeniowy 14, Arkusz ćwiczenio
3x08 (45) W krzemieniowce, Książka pisana przez Asię (14 lat)
45 14
Pacewicz O nadużyciach seksualnych wobec dzieci str 13 14,21 45
2009 05 30 14;57;45
akumulator do rover 45 saloon rt 14 16 18
akumulator do rover 45 rt 14 16 18
Prez 14 09 45
więcej podobnych podstron