TYRYSTOROWY UKŁAD
PROSTOWNICZY 3T OBCIĄŻONY RLE –
PRZEWODZENIE CIĄGŁE
.
2
1
B
C
2
1
A
2
1
R
2
1
T1
B
C
2
1
.
2
1
T2
T3
E
L
A
2
1
schemat ideowy układu
L
e
D1
R
2
1
E
schemat zastępczy
dla przewodzenia pojedynczego tyrystora.
*Przebieg napięcia „u” oraz prądu „i”
odbiornika
L(di/dt)
E
pi
2pi
wt
pi/2
U
min
2
2
0
β
π
α
π
π
α
⋅
≤
≤
≤
≤
z
z
Dla obciążenia RLE równanie napięciowe
obwodu zastępczego w ustalonym stanie
ma postać:
t
d
di
L
Ri
E
t
U
zm
ω
ω
α
ω
+
+
±
=
+
)
sin(
Przy czym „+E” praca prostownika „-E”
praca falownika
*rozwiązaniem tego równania ma postać:
* prąd ma 2 składowe: sinusoidalna i
składową operatorowa tłumienia:
* wartość napięcia wyprostowanego
wyraża zależność –wartości średnia
wzoru definicyjny:
3
2
);
(
2
3
0
π
α
α
ω
π
α
=
=
⋅
=
∫
pgr
p
d
p
t
ud
U
gdzie: alfa z- kat opóźnienia wysterowania
tyrystorów
z
ϑ
- kat załączania tyrystora
z
α
=
z
ϑ
-(
3
2
π
π
−
);
w
w
ϑ
α =
-(
3
2
π
π
−
)
w
p
ϑ
α =
-
z
ϑ
=
w
α
-
z
α
Wartość średnia prądu odbiornika:
Wzoru definicyjny:
∫
=
p
t
id
I
d
α
ω
π
0
)
(
2
3
I
d
=
R
E
p
I
P
R
E
U
z
zm
d
−
⋅
=
−
α
π
π
cos
sin
- wartość skuteczna napięcia i prądu
obliczone sa zgodnie z wzorami
definicyjnymi:
2
1
0
2
)
(
2
3
=
∫
p
t
d
u
U
α
ω
π
2
1
0
2
)
(
2
3
=
∫
p
t
d
i
I
α
ω
π
- Zakres sterowalności tyrystora
min
0
β
π
α
⋅
≤
≤
z
przy
czym:
2
0
π
α ≤
≤
z
Oraz Ud>0 praca
prostownikowa
min
2
β
π
α
π
⋅
≤
≤
z
Wartość Ud<0 praca falownikowa;
z
α
π =
2
to Ud=0
z
β
- kat wyprzedzenia
wysterowania tyrystorów
Minimalny kat wyprzedzenia w pracy
falownikowej zabezpieczający przed
przewrotem falownika musi spełnić
równanie
δ
µ
α
π
β
+
>
−
=
max
min
z
Gdzie
µ
-kat komutacji;
δ
- kat
odpowiadający czasowi wyłączania
tyrystora
Nie spełnienie tego warunku
uniemożliwia wyłączenie, odzyskanie
przez przewodzący tyrystor
właściwości blokowania przed
punktem komutacji roboczej w pracy
falownikowej, tyrystor będzie
przewodzili nadal, ale pracował pod
wpływem napiec Ud+E
Dla pracy prostownikowej prąd
płynie, gdy
E
t
U
zm
>
ω
sin
Charakterystyka regulacyjna
opisująca zależność
z
do
d
U
U
α
cos
=
do
U
-maxymalna wartość średnia
napięcia (przy pełnym wysterowaniu
z
α
=0)
alfaz
pi
-1
Ud/Udo
praca
prostownikowa
praca
falownikowe
1
pi/2
TYRYSTOROWY UKŁAD
PROSTOWNICZY 3T OBCIĄŻONY
RLE – PRZEWODZENIE
PRZERYWANE
Schemat taki sam jak poprzednio, ale
L
E
R
2
1
e
D1
α
w =
α
p
+
α
z
α
w
f(
α
w,
tgφ,e
w
)
jeśli
α
z
rośnie
α
w
rośnie.
U
zm
sin (ωt +
α
z
) =E
±
Ri + ωL
t
d
di
ω
,przy czym”+E”praca prostownicza,
„-E”praca falownika
Wartość srednia napiecia
wyprostowanego
U
d
=
∫
∏
p
t
Udt
α
ω
0
)
(
2
3
-wzór definicyjny
wartoś srednia prądu
I
d
=
∫
p
t
d
α
ω
π
0
2
3
-wzór definicyjny
Wartośc skuteczna prądu i
napiecia obliczone są ze wzoru
I=
2
/
1
0
2
2
3
∫
p
t
d
i
α
ω
π
; U=
2
/
1
0
2
2
3
∫
p
t
d
u
α
ω
π
W obliczeniach przybliżonych tgφ=1,
impuls prądu można aproksymowac
dodatnim półokresem
Sinusoidy o wartości maksymalnej i
max
i czasie trwania α
p
I=
2
/
1
0
2
max
)
)
2
sin(
(
2
3
t
d
t
i
p
ω
ω
π
π
α
∫
−
-
-
π
α
p
i
3
2
max
(minus pomiędzy
nawiasem a pierwiastkiem
TYRYSTOROWY UKŁAD
PROSTOWNICZY 3T OBCIĄŻONY
RL – PRZEWODZENIE CIĄGŁE
Przebiegi napięcia:
Przebiegi prądu:
Równanie napięciowe:
sin(
)
zm
di
U
t z R i L
dt
ω ϑ
ω
ω
+
= ⋅ +
Wartość średnia napięcia
wyprostowanego definiujemy z :
0
3
2
( );
2
3
p
d
p
pgr
U
u d t
α
π
ω α α
π
=
⋅
=
=
ň
gdzie:
z
α
-kąt opóźnienia wysterowania
tyrystorów
z
ϑ
-kat załączania tyrystorów
Wartość średnia prądu: wzór
definicyjny
0
3
2
p
d
I
id
t
α
ω
π
=
ň
, dla 3T:
3
sin cos
3
d
d
zm
z
U
I
I
R
π
α
π
=
=
Wartości skuteczne napięcia i
prądu liczymy ze wzorów:
2
3
2
0
3
( ) ( )
2
I
i
t d
t
π
ω
ω
π
=
ň
2
3
2
0
3
( ) ( )
2
U
u
t d t
π
ω
ω
π
=
ň
Charakterystyka regulacyjna:
Układ może pracować w
charakterze prostownika z
d
U
>0 w przedziale 0<
z
α
<
2
π
Układ może pracować w
charakterze falownika z
d
U
<0 w
przedziale
2
π
<
z
α
<
π
Charakterystykę regulacyjną
opisuje zależność:
0
cos
d
z
d
U
U
α
=
TYRYSTOROWY UKŁAD
PROSTOWNIKOWY ST
OBCIĄŻONY RL –
PRZEWODZENIE PRZERYWANE
.
2
1
A
2
1
B
C
2
1
.
2
1
R
2
1
T2
T3
T1
B
C
2
1
A
2
1
L
L
R
2
1
e
D1
Równanie napięciowe obwodu w
ustalonym stanie pracy ma postać:
( )
t
d
di
L
R
t
U
L
t
m
ϖ
ϖ
ϑ
ϖ
⋅
+
=
+
⋅
)
sin(
2
Wartość średnia napięcia na
odbiorniku:
)
(
2
3
0
t
d
u
U
p
d
ϖ
π
α
∫
=
∫
+
−
+
−
=
⋅
=
W
ż
t
td
U
Ud
zm
α
π
π
α
π
π
ϖ
ϖ
π
3
2
3
2
sin
2
3
+
−
−
+
−
W
Z
zm
U
α
π
π
α
π
π
π
3
2
cos
3
2
cos
2
3
(
)
W
Z
zm
U
ϑ
ϑ
π
cos
cos
2
3
−
=
gdzie:
α
z
– kąt opóźnienia wysterowania tyrystorów
Z
ϑ
- kąt załączenia tyrystorów
−
−
=
3
2
π
π
ϑ
α
z
z
Z
W
Z
W
p
α
α
ϑ
ϑ
α
−
=
−
=
−
−
=
3
2
π
π
ϑ
α
W
W
wartość średnia prądu
∫
=
p
t
id
Id
α
ϖ
π
0
2
3
wartość skuteczna prądu i napięcia
obliczana jest ze wzorów
2
1
0
2
2
3
=
∫
p
t
d
i
I
α
ω
π
;
2
1
0
2
2
3
=
∫
p
t
d
u
U
α
ω
π
W obliczeniach przybliżonych dla tgφ
≥
1
impuls prądu moża aproksymować dodatnią
półfalą sinusoidy opisywaną wzorem:
≅
t
i
i
p
ω
α
π
sin
max
KOMUTACJA W TYRYSTOROWYCH
UKŁADACH PROSTOWNICZYCH
W skutek występowania indukcyjności
w obwodach prądowych fazowych
przejmowanie obciążenia od zaworu
kończącego przewodzenie przez zawór
rozpoczynający przewodzenie nie może
odbywać się skokowo. Występuje
przedział czasu, w którym jednocześnie
przewodzą dwa zawory, zawierające
źródło zasilania. W przedziale tym
następuje oddawanie energii pola
rozproszenia z obwodu zaworu
kończącego przewodzenie i
gromadzenie energii w obwodzie
zaworu występującego do pracy.
Proces ten nazywa się komutacja
(przetłaczanie się zaworów (diód). Gdy
jednocześnie przewodzą zawory 2 faz
ma miejsce komutacja prosta zwana
pojedyncza. Jeżeli w procesie
uczestniczą zawory 3 lub więcej faz ma
miejsce komutacja złożona. Czas
trwania komutacji, czyli czas, gdy prąd
płynie przez dwie fazy nazywamy
katem komutacji.
o
s
R
L
m
Π
−
≈
ω
γ
1
cos
L
S
- indukcyjność rozproszenia
R
O
- rezystancja obciążenia
(rysunek z końca)
Dla układu prostego (2 fazowego
można ułożyć następującego równania:
)
cos(
)
cos(
2
2
2
2
p
t
U
U
p
t
U
U
m
m
b
a
π
ω
π
ω
−
=
+
=
L
K
- indukcyjność komutacyjna –
indukcyjność równoważna układu po
stronie prądu przemiennego złożona z
indukcyjności rozproszenia
transformatora, sieci zasilającej ,
połączeń i dławików anodowych.
Pominięto rezystancje komutacyjna
oraz przyjęto zawory idealne.
Układ komutacji prostej może być
zastąpiony układem równoważnym, w
którym napięcie źródła jest równe
średniej arytmetycznej napiec
komutacyjnych faz a indukcyjności L
K
są połączone równolegle.
Wartość chwilowa napięcia
wyprostowanego w czasie komutacji:
dt
di
L
R
E
U
i
+
+
=
Dla uproszczenia zależności
opisujących proces komutacji
przyjmuje się założenie, że
indukcyjność obciążenia
∞
→
L
oraz
d
I
i
=
, wtedy:
(
)
2
2
2
b
a
U
U
U
+
=
po uwzględnieniu iż dla
z
t
α
ω =
oraz
d
ak
I
i
=
2
Przebiegi prądów fazowych:
)
cos
(cos
sin
)
cos
(cos
sin
2
2
2
2
t
p
L
U
i
t
p
L
U
I
I
z
k
m
bk
z
k
m
d
ak
ω
α
π
ω
ω
α
π
ω
−
=
−
−
=
Po uwzględnieniu w ostatnim wzorze
ze dla
γ
α
ω
+
=
z
t
i
d
bk
I
i
=
2
z
m
d
k
z
p
U
I
L
α
π
ω
α
γ
−
−
=
)
sin
arccos(cos
2
Kat komutacji zależy od parametrów
układu prostowniczego (
k
k
L
X
p
ω
=
,
) i jest funkcją
zmiennych obciążenia (
z
d
I
α
,
).
Zwiększa się przy zwiększaniu (
d
k
I
X
p
,
,
).
Komutacja zmienia przebiegi a tym
samym powoduje:
- Obniżenie wartości średniej napięcia
wyprostowanego
- Wzrost współczynnika kształtu
napięcia wyprostowanego
- Wydłużenie czasu przewodzenia
prądu przez zawór
- Zmniejsza wartość skuteczna prądu
uzwojenia
- Zmniejszenie sztywności
zewnętrznej prostownika
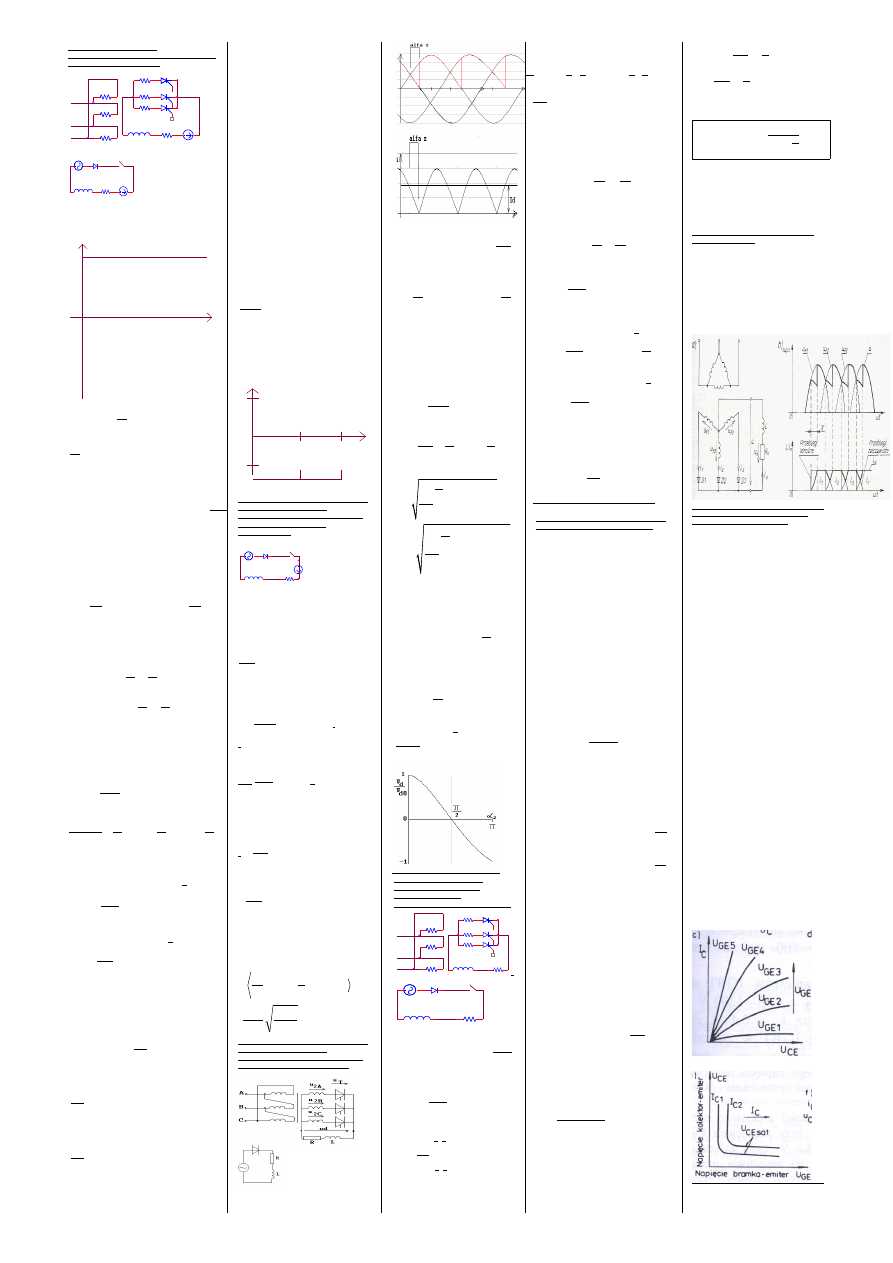
TRANZYSTOR IGBT – DZIAŁANIE I
PODSTAWOWE CHARAKTER.
Tranzystor bipolarny z izolowaną bramką jest
sterowany napięciowo tranzystorem MOS. Ma
dużą szybkość przełączania i mała rezystancję
baz-emiter.
Współczesny tranzystor IGBT zawiera kilka
tysięcy elementarnych struktur tranzystorowych,
połączonych równolegle na jednym podłożu.
Działanie:
Stan przewodzenia IGBT opisują statyczne
charakterystyki wyjściowe. Są one podobne do
charakterystyk tranzystora BJT. Prąd kolektora
jest funkcją ciągłą napięcia kolektor – emiter
U
CE
oraz napięcia bramka – emiter U
GE
.
Charakterystyczne parametry stanu
przewodzenie są: - prąd ciągły stały (DC)
kolektora I
C
, -powtarzalny szczytowy prąd
kolektora I
CRM
, średni prąd kolektora I
C(AV)M
,
-napięcie przewodzenia kolektor-emiter U
CEsat
.
Stany przełączania są ilustrowane przebiegami
napięć i prądów. Mamy 2 fazy zaniku prądu
kolektora i
C
. W pierwszej fazie następuje szybki
spadek i
C
(czas opadania t
f
) do wartości ok.
0,1I
C
, w drugiej stromość opadania prądu jest
zdecydowanie mniejsza (czas t
Z
), faza ta
stanowi tzw. „ogon prąd wyłaczanego”.
Czas wyłączania IGBT bywa definiowany w
dwojaki sposób, jako:
-czas t
off
, liczony od chwili zaniku napięcia
bramki do chwili osiągnięcia przez prąd
kolektora wartości 0,1I
C
-lub czas (t
off
+t
Z
), liczony do chwili osiągnięcia
przez prąd kolektora wartości 0,01I
C
, jest on
istotny dla wysokich częstotliwości pracy.
Czas t
off
jest sumą 2 czasów: magazynowania t
s
(od chwili zaniku napięcia bramki do
rozpoczęcia procesu opadania prądu kolektora)
oraz czas t
f
opadania prądu kolektora.
Czas załączania t
on
składa się z czasów:
opóźnienia t
d
i narastania prądu t
r
.
Czas t
d
, liczony od podania dodatniego napięcia
na bramkę do rozpoczęcia narastania prądu
kolektora.
Do prawidłowej pracy IGBT w przekształtniku
wymagana jest zazwyczaj szybka dioda
prostownicza, bocznikująca zaciski kolektor-
emiter. W tym celu wykonywane są moduły
elektroizolowane, zawierające oba elementy w
jednej obudowie
Wyszukiwarka
Podobne podstrony:
eie2, EKONOMIA, Rok 2, Ekonomia Integracji europejskiej
EiE2 egzamin
sciaga eie2, EKONOMIA, Rok 2, Ekonomia Integracji europejskiej
SPRAWOZDANIE transformator, SiMR, LAB EiE2
Ściąga EiE2, studia, stare, New Folder (3), sem3, Eie, sem4
EIE2 2termin
eie2, EKONOMIA, Rok 2, Ekonomia Integracji europejskiej
więcej podobnych podstron