1. Wyjaśnij różnicę w budowie silnika jednofazowego, klatkowego, trójfazowego i pierścieniowego.
Silnik asynchroniczny (indukcyjny) – jest maszyną elektryczną zmieniającą energię elektryczną
w energię mechaniczną, w której wirnik obraca się z poślizgiem w stosunku do wirującego pola
magnetycznego wytworzonego przez uzwojenia stojana.
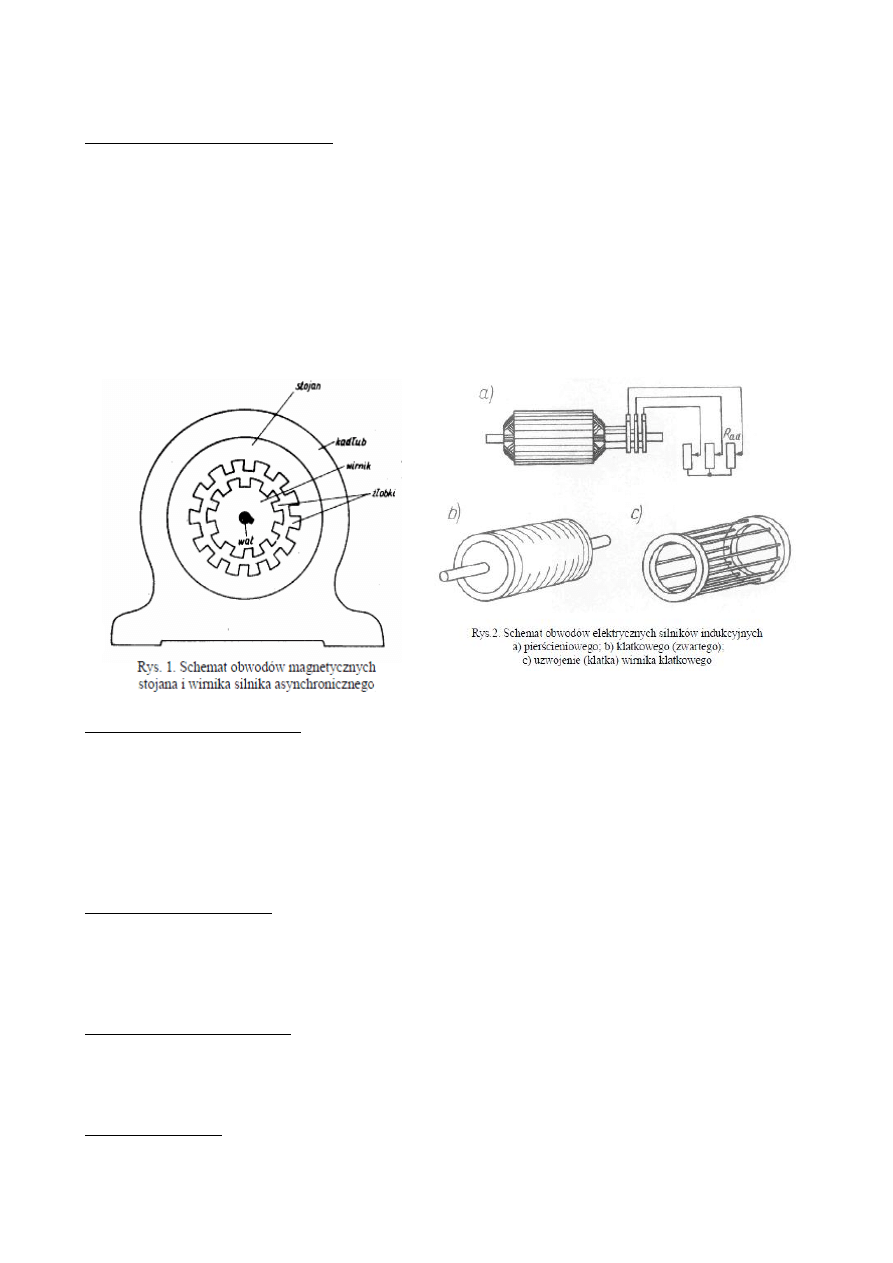
Czesc nieruchoma (stojan) ma kształt wydrażonego wewnatrz walca. W wewnetrznej przestrzeni stojana
znajduje sie częśd wirujaca maszyny zwana wirnikiem, również w kształcie walca. Obwód magnetyczny
stojana i wirnika jest wykonany w postaci rdzenia z blachy stalowej z dodatkiem krzemu, zwykle o grubosci
0.5
mm;
wirniki
dużych
maszyn
indukcyjnych
sa
wykonane
z
blach
o grubosci od 1 do 2 mm. Szczelina powietrzna miedzy stojanem i wirnikiem ma w maszynach małej mocy
wymiar od 0.1 do 0.5 mm, w dużych (powy2ej 20 kW) od 1 do 3 mm. Na wewnetrznej stronie rdzenia
stojana i zewnetrznej stronie rdzenia wirnika wykonane sa na całej długości specjalne rowki zwane
żłobkami, w których umieszczone sa uzwojenia. Elementy obwodu magnetycznego między żłobkami noszą
nazwę zębów.
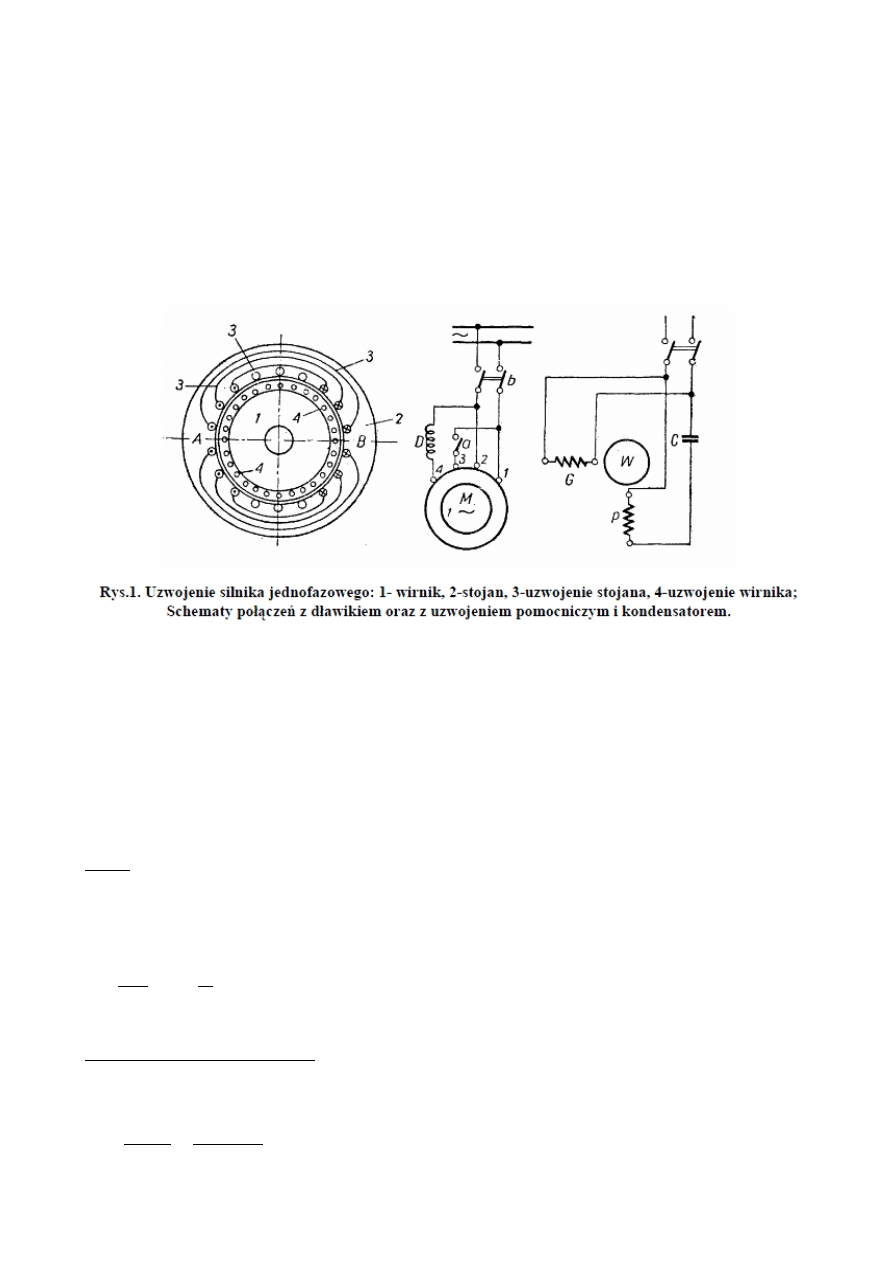
Silnik indukcyjny pierścieniowy - to taki, w którym do obwodu uzwojenia wirnika można przyłaczyc
dodatkowe elementy zwiekszajace rezystancje każdej fazy. Do tego służa umieszczone na wale wirnika
pierscienie slizgowe, do których przylegaja szczotki, połaczone z dodatkowymi zewnetrznymi elementami.
Taka
zmiane
rezystancji
obwodu
elektrycznego
wirnika
stosuje
sie
w celu przeprowadzenia rozruchu, regulacji predkosci lub hamowania silnika. Ze wzgledu na to, że
charakterystycznym elementem omawianego typu silnika są pierścienie ślizgowe, nazywa się go silnikiem
indukcyjnym pierścieniowym. Schemat obwodów elektrycznych silnika pierścieniowego z dodatkowymi
elementami rezystancyjnymi ilustruje rys. 2a.
Silnik indukcyjny klatkowy - jeżeli obwód elektryczny jest wykonany z nieizolowych pretów, to prety te
połaczone po obu stronach wirnika pierścieniami zwierającymi. Tym samym obwód wirnika jest zawsze
zwarty a zatem żadnych dodatkowych elementów przyłączad do niego nie można. Silnik taki nosi nazwe
silnika indukcyjnego zwartego, nazywany bywa też klatkowym ze wzgledu na to, że pręty wirnika połączone
pierścieniami tworza „klatkę” (rys.2c).
Silnik indukcyjny trójfazowy – najczęściej stosowany silnik indukcyjny, posiadający trójfazowe uzwojenie
stojana. Fazy uzwojenia w czasie pracy sa połaczone w gwiazde lub w trójkat. Po przyłaczeniu do sieci, w
trzech nieruchomych cewkach (fazach) stojana, przesunietych o 120
o
, płyna prady fazowe sinusoidalne o
wartosci chwilowej I
R
, I
S
, I
T
, przesuniete wzgledem siebie o 1/3 okresu.
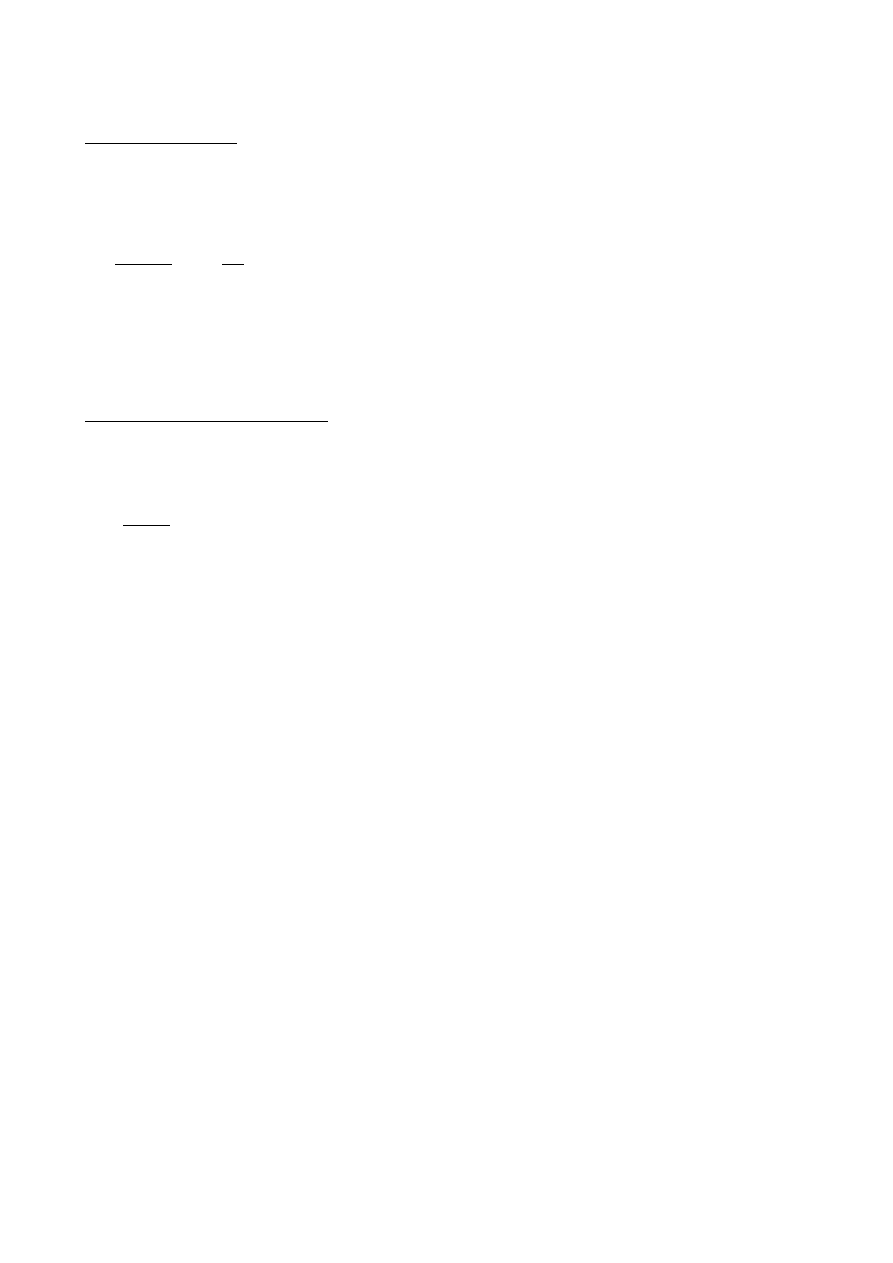
Silnik jednofazowy - składa się ze stojana i wirnika. Nieruchomy stojan jest wykonany
z izolowanych wzajemnie blach stalowych, charakteryzujących się wyciętymi żłobkami na swym
wewnętrznym obwodzie. W obszarze 2/3 wszystkich żłobków stojana jest umieszczone uzwojenie główne
(robocze) silnika, natomiast w pozostałej części znajduje się nawinięte uzwojenie fazy pomocniczej
(rozruchowej). Wirnik wykonany jest w formie klatki dla silników małych mocy lub pierścieni dla silników
dużej mocy. Uzwojenie główne zasilane jest wyłącznie napięciem jednofazowym - źródło prądu
sinusoidalnie zmiennego, wytwarzające w stojanie strumieo magnetyczny, zmienia się w czasie, w takt
zmian wywołującego go prądu, ale pozostający nieruchomo w przestrzeni. Wytworzone pole magnetyczne
jest polem magnetycznym pulsującym (oscylującym). W tych warunkach nieruchomy wirnik zachowuje się
tak jak uzwojenie wtórne transformatora, w którym indukuje się SEM powodując przepływ prądu w wirniku.
W wyniku oddziaływania pulsującego strumienia magnetycznego stojana na uzwojenia wirnika z prądem
powstają siły. Siły te znoszą się wzajemnie, wyniku, czego wirnik pozostaje nieruchomy – brak momentu
napędowego (rozruchowego), więc stosuje się w stojanie drugie uzwojenie tzw. fazą rozruchową
(kondensatorową lub oporową).
PODSUMOWANIE W DWÓCH ZDANIACH:
Silnik trójfazowy ma trójfazowe uzwojenie stojana, jednofazowy ma jednofazowe + faza rozruchowa, silnik
klatkowy ma uzwojenia wirnika połączone wewnętrznie, natomiast pierścieniowy ma uzwojenia wirnika
przyłączone do pierścieni ślizgowych przekazujących przez szczotki prąd na zewnątrz silnika.
2. Podad podstawową definicję kinematyczną silnika asynchronicznego (def. poślizgu i prędkości
wirowania pola wirnika; def. prędkości mechanicznej i prędkości synchronicznej stojana).
Poślizg – pojecie używane w przypadku silników indukcyjnych określajace różnicę pomiędzy prędkością
wirowania pola magnetycznego powstającego w stojanie n
S
(prędkością synchroniczną), a rzeczywista
prędkością obrotową silnika n (prędkością asynchroniczną), odniesioną do prędkości wirowania pola
magnetycznego
powstającego
w
stojanie
n
S,
wynikającą
z
liczby
par
biegunów
i częstotliwości prądu zasilającego:
𝑠 =
𝑛
𝑠
−𝑛
𝑛
𝑠
= 1 −
𝑛
𝑛
𝑆
Prędkośd wirowania pola wirnika – pod wpływem siły elektromotorycznej E
2S
w wirniku płynie prąd o
częstotliwości f
2
. Prąd ten wytworzy pole magnetyczne wirujące z prędkością obrotową synchroniczną n
2
względem obracającego się wirnika silnika:
𝑛
2
=
60 ∗ 𝑓
2
𝑃
=
60 ∗ 𝑓
1
∗ 𝑠
𝑃
= 𝑛
1
∗ 𝑠 = 𝑛
1
− 𝑛
Prędkośd mechaniczna - Po podłączeniu silnika indukcyjnego do napięcia prądu przemiennego wirnik wiruje
z prędkością mechaniczną n
m
mniejszą od prędkości synchronicznej n
S
. Jest to wynikiem istnienia oporów
ruchu, a wpływ na tę prędkośd ma rezystancja wirnika. Różnicę między
prędkością synchroniczną n
S
a mechaniczną n
m
opisujemy za pomocą wielkości zwanej poślizgiem s, więc
przekształcając wzór na poślizg:
𝑠 =
𝑛
𝑠
− 𝑛
𝑚
𝑛
𝑠
= 1 −
𝑛
𝑚
𝑛
𝑆
otrzymujemy następujący wzór na prędkośd mechaniczną n
m
:
𝑛
𝑚
= 𝑛
𝑠
(1 − 𝑠)
Prędkośd synchroniczna stojana - prędkośd wirowania pola magnetycznego powstającego
w stojanie silnika prądu przemiennego. Prad trójfazowy o czestotliwosci f
1
płynacy w trójfazowym
uzwojeniu stojana o P parach biegunów wytwarza pole magnetyczne wirujace wzgledem stojana
z predkoscia synchroniczna n
1
:
𝑛
1
=
60 ∗ 𝑓
1
𝑃
3. Podad definicję prądu stojana (wyprowadzid wzór).
Stojan ( magneśnica ) maszyny prądu stałego składa się z jarzma stalowego lub żeliwnego oraz biegunów,
na których umocowane są cewki wzbudzające. Prąd magnesujący I
m
, przepływający przez uzwojenia cewek
wzbudzających, wytwarza strumieo magnesujący Φ
m
, Który zamyka się przez rdzenie biegunów, jarzmo,
szczeliny powietrzne oraz rdzeo wirnika ( twornika). Strumieo ten dzieli się na dwa strumienie
przebiegające w dwóch równoległych obwodach magnetycznych.
Nie ma na razie wyprowadzenia. Nawet nie wiem do jakiego wzoru mam dojśd bo to pytanie jest chujowo
imho zadane....
jestem teraz w trakcie wyłuskiwania jakichkolwiek pasujących informacji z Przezdzieckiego
4. Wyprowadzid wzór na moment elektromagnetyczny silnika asynchronicznego.
Pole magnetyczne wirujące oddziałowuje na wirnik z mocą równą mocy prądu wytworzonego w
obwodzie wirnika, która może byd wyrażona wzorem:
P
2
=3 E
2
I
2
cos
φ
2
Moc tę można również przedstawid jako iloczyn momentu elektromagnetycznego przez prędkośd kątową
wirowania pola:
P
2
=M
ω
S
Z obydwu ostatnich wzorów otrzymuje się wzór na moment elektromagnetyczny w postaci:
M =
3⋅E
2
⋅I
2
⋅(cos
φ
2
)
ω
S
Jeżeli uwzględnimy, że zgodnie ze wzorem :
E
2
=k
2
Φ
f
1
SEM E
2
jest proporcjonalna do strumienia Φ, oraz wprowadzimy stałą:
c=
3⋅k⋅ f
1
ω
S
wówczas otrzymamy wzór na moment:
M =c Φ I
2
cos
φ
2
5) Wyprowadzid wzór na moment obrotowy silnika, przedyskutowad iloczyn I
2
R
-
moment rozruchowy.
- moment obrotowy różni się od momentu elektromagnetycznego o straty.
∆P – straty, 𝑃
2
=
2
2
2
2
2
m
2
– liczba faz
{
𝑃
1
− 𝑃
2
= 𝑃
𝑃
1
1
=
𝑃
2
2
𝑃
2
= 𝑃
1
2
1
𝑠 =
1
−
2
1
= 1 −
2
1
𝑃
2
= 𝑃
1
(1 − 𝑠) = 𝑃
1
− 𝑃
1
𝑠
f
1
=f
𝑃
1
− 𝑃
1
− 𝑃
1
𝑠 =
2
2
2
2
f – częstotliwośd sieci
1
𝑠 =
2
2
2
2
f
1
– częstotliwośd stojana
=
2
2
2
2
1
𝑠
=
1
𝑃
2
2
2
2
𝑓
1
𝑠
=
1
2
2
2
𝑓
1
𝑠
6) Wyznaczyd na podstawie wyprowadzonego wzoru na moment obrotowy w zależności od napięcia
zasilania i poślizgu krytycznego. Przedyskutowad zmiany momentu w funkcji poślizgu. Posłużyd się
wykresami.
{
=
2
2
2
2
1
𝑠
2
=
2
√
2
2
2
2
2
=
∗
𝑠
1
2
∗
=
2
=
2
∗
𝑠
=
2
1
2
1
𝑠
(
2
∗2
𝑠
2
2
2
2
∗2
𝑠
2
)
=
2
𝑃
2 𝑓
1
2
2
∗2
𝑠
𝑠
2
(
2
𝑠
2
2
∗2
)
=
2
𝑃
2 𝑓
1
2
1
2
2
𝑠 (
2
2
𝑠
2
2
∗2
)
{
=
𝑓
1
1
2
𝑠
2
2
2
2
∗2
𝑠
2
= 𝑓(𝑠)
1
=
1
= 𝑓(𝑠) = 𝑓( )
=
2
𝑓
1
1
𝑠
2
2
2
∗2
𝑠
2
W celu znalezienia poślizgu krytycznego należy policzyd pochodną momentu względem poślizgu i
przyrównad ją do zera.
𝑠
= 0
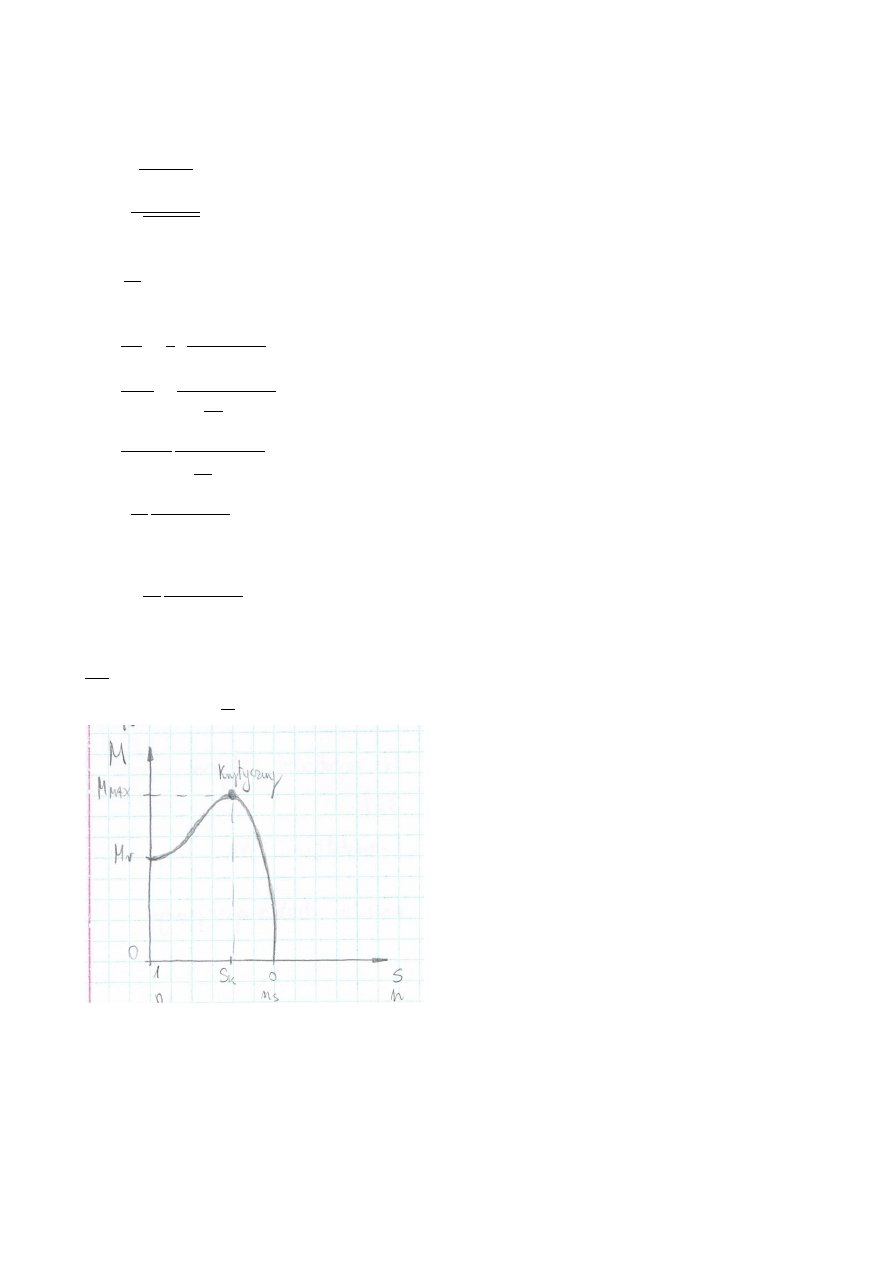
Otrzymujemy: 𝑠
=
Przy poślizgu s = 0 (n=n
s
idealny bieg jałowy) moment rozwijany przez maszynę równa się zeru. Natomiast
gdy poślizg s=1((n=0 – stan zwarcia) silnik rozwija moment rozruchowy M
r
.
Dla małych poślizgów, mniejszych od krytycznego mamy częśd krzywej zbliżona do linii prostej, zwaną
częścią stateczną. Częśd krzywej momentu leżąca za poślizgiem skutecznym jest zbliżona do hiperboli i
nazywana częścią niestateczną.
7. Omówid właściwości napędowe silnika asynchronicznego trójfazowego na przykładzie jego
charakterystyki mechanicznej.
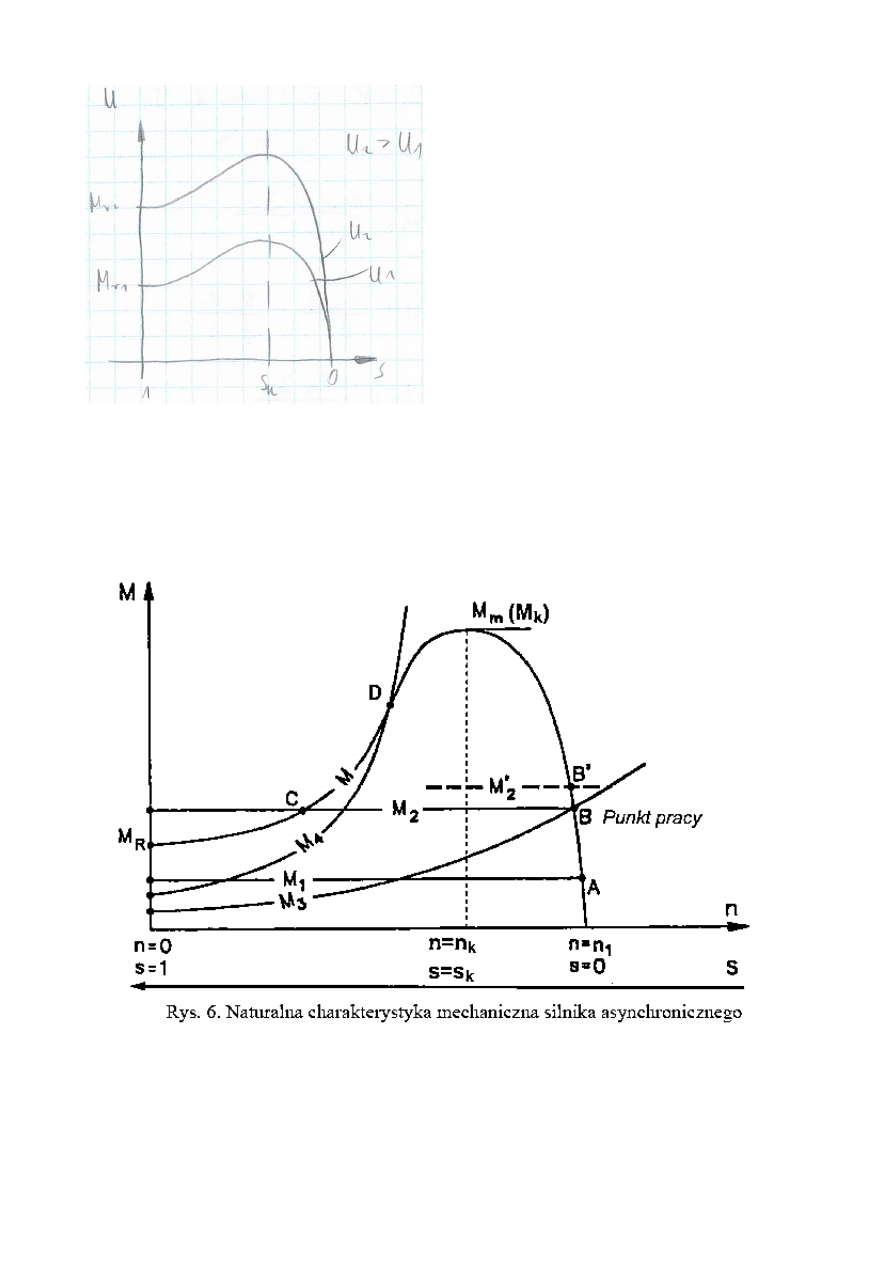
Jeżeli moment obciążenia silnika M1 W chwili włączenia go do sieci jest mniejszy od
początkowego momentu rozruchowego MR, to wirnik zaczyna się obracad w kierunku
wirowania pola magnetycznego.
Gdy obciążenie jest stałe w całym zakresie prędkości, to prędkośd wzrasta, aż do
wartości, przy której moment obciążenia równy jest momentowi silnika, czyli do punktu
przecięcia się charakterystyki mechanicznej silnika i charakterystyki obciążenia momentem
M1 (punkt A). Wzrost prędkości następuje w okresie rozruchu silnika, zgodnie z ogólnym
równaniem dynamiki:
Przy obciążeniu silnika momentem M2 prosta M2 ma z krzywa momentu silnika dwa punkty
wspólne: B i C (rys. 6). Punkt B jest punktem pracy stabilnej, gdyż w razie, jakiejkolwiek chwilowej zmiany
charakterystyki silnika lub obciążenia układ ponownie wróci do pracy w punkcie B, jeżeli zniknie przyczyna
zmiany charakterystyki. Jeżeli np. moment obciążenia chwilowo wzrośnie do wartości M’2, to wirnik
zostanie przyhamowany, moment silnika wzrośnie i nowy stan pracy ustali się w punkcie B’. Jeżeli moment
obciążenia z powrotem zmniejszy się do wartości M2, to prędkośd wzrośnie, moment silnika zmniejszy się i
układ powróci do pracy w punkcie B. Tak się zachowa układ przy dowolnym stałym obciążeniu w całym
zakresie charakterystyki silnika od s=0 do s=sk, te cześd charakterystyki nazywa się częścią stabilna.
Inaczej zachowuje się silnik pracujący w punkcie C. Jeżeli obciążenie wzrosło to silnik zmniejszy
prędkośd. Ale przy mniejszej prędkości moment silnika jeszcze się zmniejsza, a zatem gdy obciążenie
powróci do poprzedniej wartości, to silnik się zatrzyma. Zakres prędkości charakterystyki od s=1 do s=sk jest
zakresem pracy niestabilnej silnika (dla stałych obciążeo).
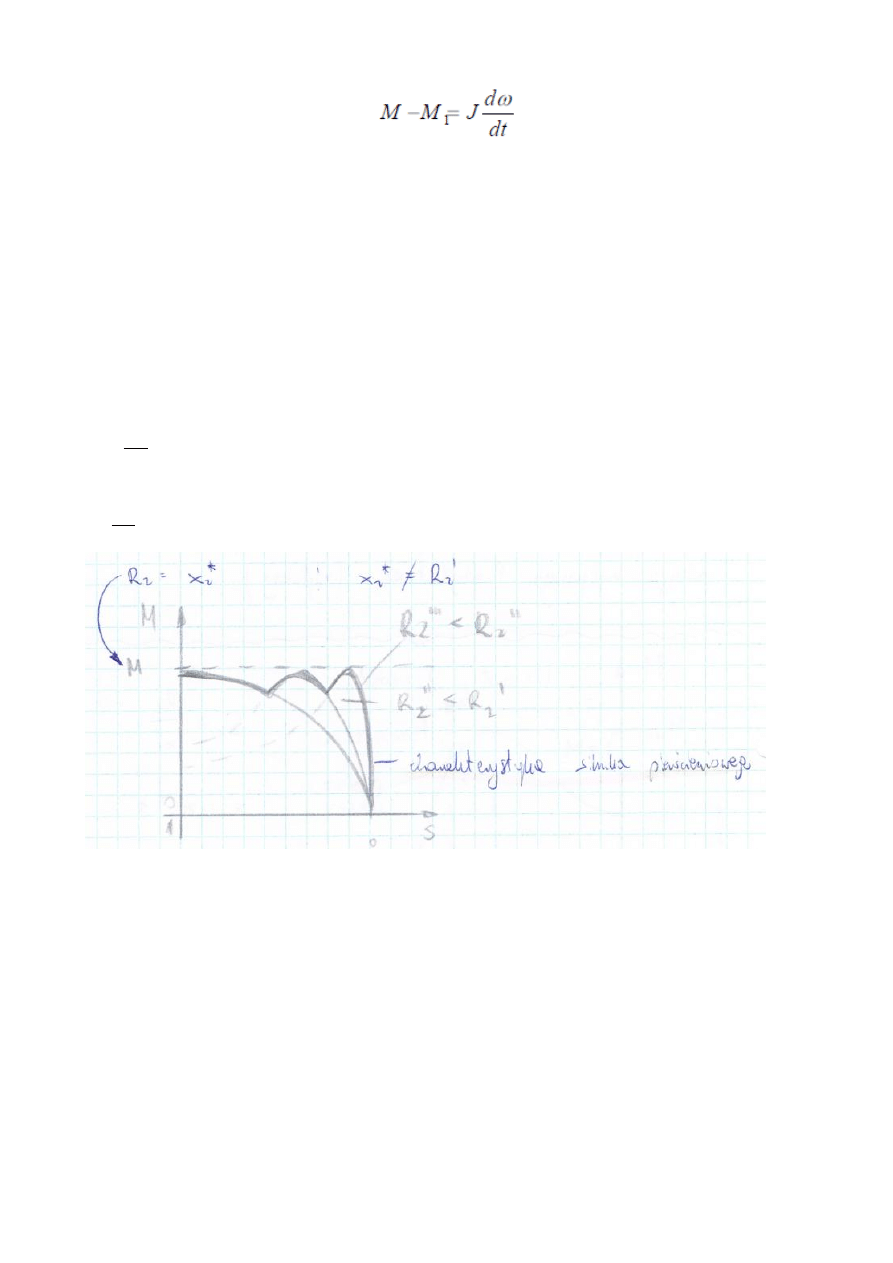
8. Wyjaśnid i narysowad charakterystykę mechaniczną pierścieniowego silnika asynchronicznego.
2
*
2
k
R
S
X
Dla
1
k
S
2
*
2
1
R
X
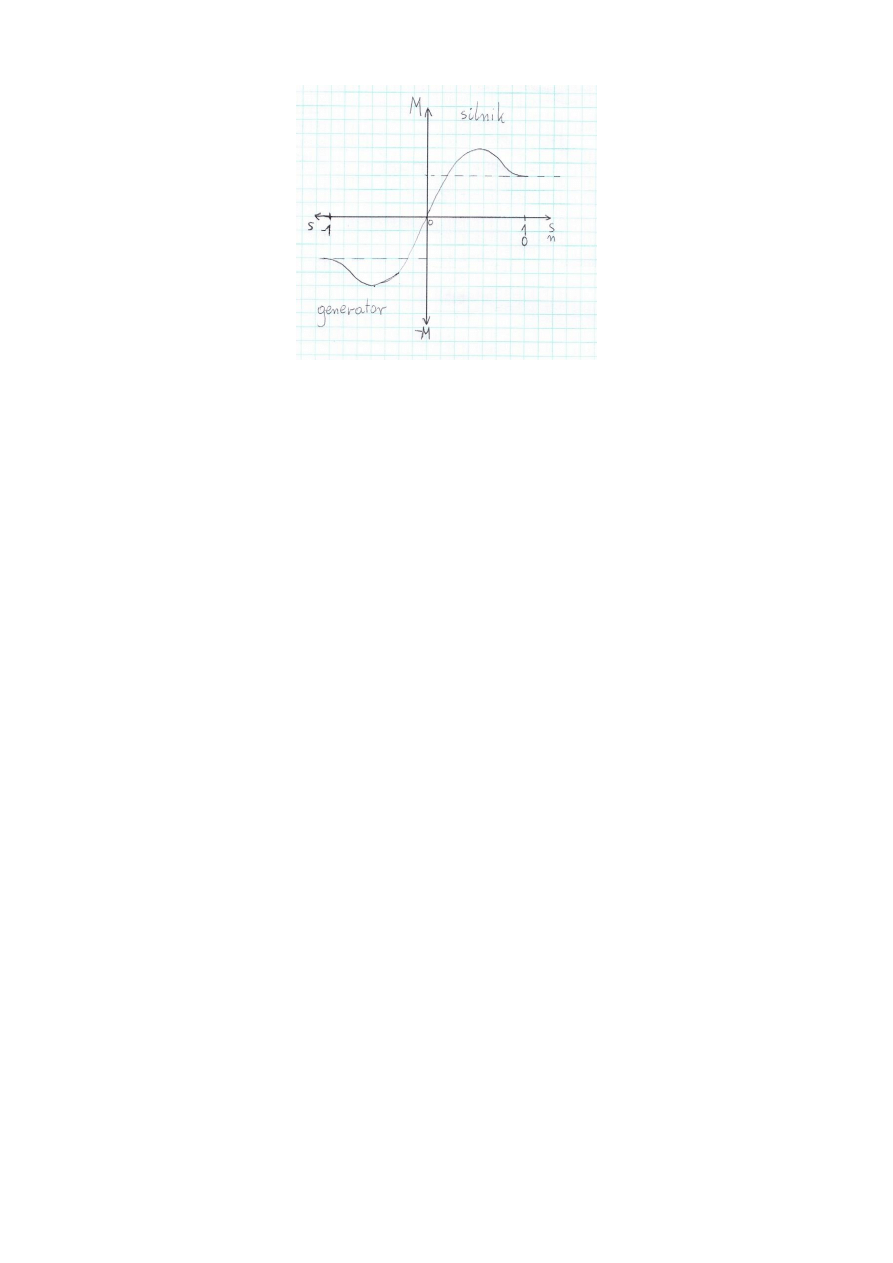
9. Silnik asynchroniczny pobiera energie elektryczną, którą przekształca w ruch obrotowy silnika. Gdy wirnik
maszyny jest napędzany przez inną maszynę wirującą np. przez turbinę – mamy do czynienia z pracą
prądnicową. Napięcie U na zaciskach jest mniejsze od sem E o spadek napięcia na rezystancji obwodu
wewnętrznego R
at
. Napięcie na zaciskach prądnicy wynosi:
U = E - R
at
* I
t
Prąd I
t
ma zwrot zgodny z e zwrotem E, natomiast moment M
e
jest skierowany przeciwnie do kierunku
prędkości obrotowej n (prędkości kątowej ω).
Dla pracy silnikowej napięcie na zaciskach równe jest:
U = E + R
at
* I
t
Hamowanie odzyskowe silnika bocznikowego zachodzi wówczas, gdy jest on napędzany z prędkością
większą od prędkości idealnego stanu jałowego. Kierunek prądu zmienia się wówczas na przeciwny niż przy
pracy silnikowej i maszyna oddaje energię elektryczną do sieci.
Hamowanie przeciwprądem (zwanego też hamowaniem przez przeciwwłączenie) dokonuje się przez
przełączenie napięcia zasilania wirnika lub przez napędzanie silnika w kierunku przeciwnym do tego, jaki
występuje przy pracy silnikowej. Po dojściu do prędkości n=0 należy silnik odłączyd od sieci, ponieważ
działający moment stara się obrócid wirnik w przeciwną stronę.
Hamowanie dynamiczne polega na tym, że obwód wirnika odłącza się od sieci i zwiera przez, odpowiednio
dobraną rezystancje, uzwojenie wzbudzenia zaś jest nadal włączone do sieci. Zewnętrzny moment
działający na wał silnika wytwarza energię w postaci prądu, który przekształcany jest w ciepło na danym
rezystorze.
Bez paniki, obrazki muszą się wczytad ;p
12. Omówid i narysowad charakterystykę napięciowo-prądową prądnicy prądu stałego samowzbudnej i
obcowzbudnej.
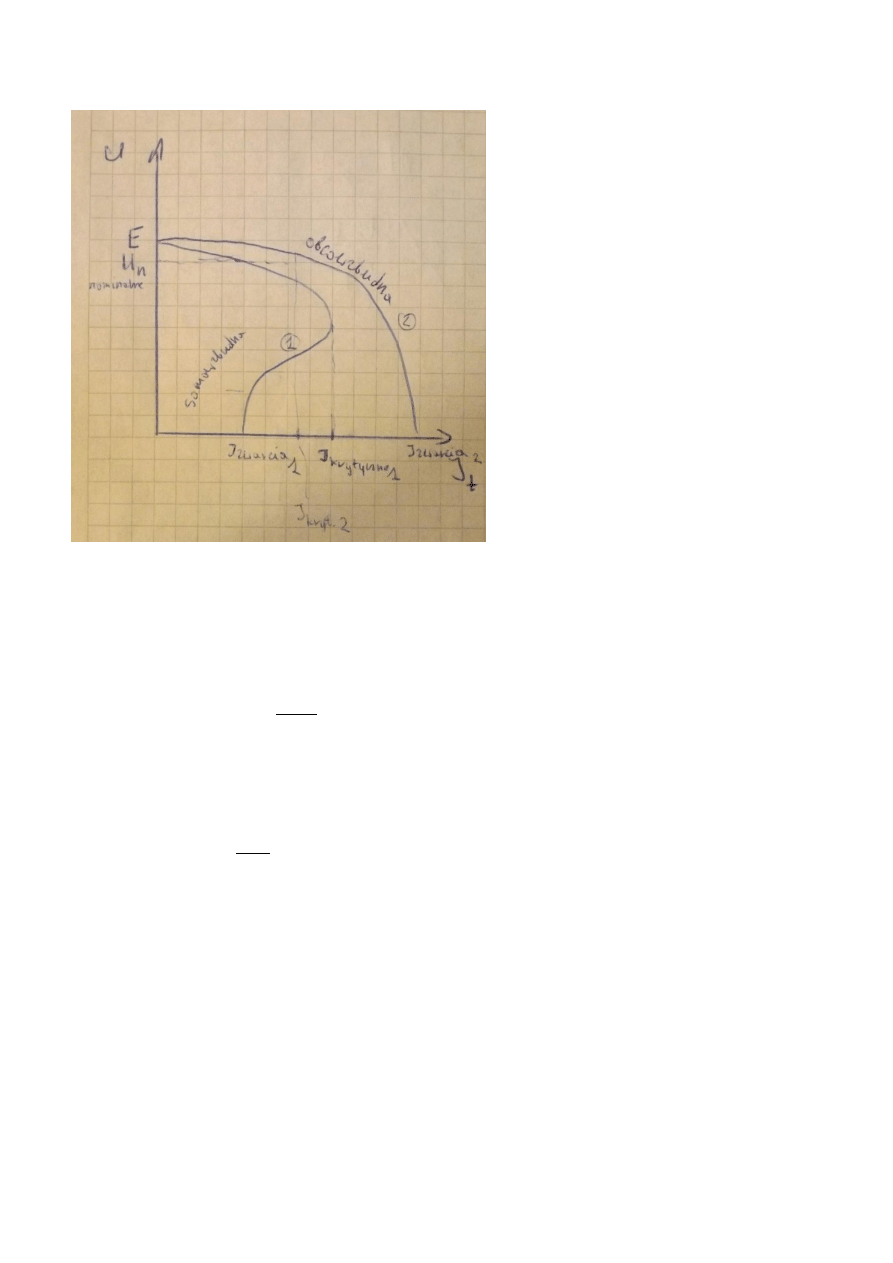
Obniżenie się wartości napięcia na zaciskach prądnicy samowzbudnej wraz ze wzrostem prądu obciążenia
jest związane z:
oddziaływaniem twornika – prąd twornika I
t
wywołuje strumieo magnetyczny, który zmniejsza sem.
ze spadkiem napięcia na rezystancji twornika
ze zmniejszeniem się prądu magnesującego – drobne zmniejszenie napięcia U sprawi że zmniejszy
się prąd magnesujący I
f
(ten w stojanie) w wyniku zależności
Spowoduje to zmniejszenie się strumienia indukcji magnetycznej ϕ a zatem i sem E, co prowadzi do
ponownego zmniejszenia napięcia U, ponieważ: U = E – RI (dla prądnicy)
Przy znacznych przeciążeniach prądnicy spadek napięcia może byd tak duży, że przy dalszym zmniejszaniu
rezystancji odbiornika R
zewn
w obwodzie zewnętrznym prądnicy prąd
nie wzrasta lecz spada, gdyż wartośd U maleje szybciej niż wartośd R
zewn
.
Samowzbudzenie
Jeżeli istnieje magnetyzm szczątkowy, to pod wpływem niewielkiego strumienia remanencji ϕ
R
w
obracającym się ze stałą prędkością obrotową uzwojeniu twornika indukuje się niewielka sem E
R
, zwana
napięciem remanencji E
R
= cϕ
R
n. W stanie biegu jałowego w obwodzie: uzwojenie wzbudzenia – uzwojenie
twornika popłynie niewielki prąd, wytwarzając znów niewielki strumieo magnetyczny. Jeśli strumieo ten ma
R
R
U
I
f
f
zewn
R
U
I
ten sam zwrot co strumieo remanencji, to wypadakowy strumieo wzrośnie i w uzwojeniu powstanie
większa sem E. Wzrost ten spowoduje wzrost prądu magnesującego, a zatem i strumienia i zjawisko to
będzie się powtarzad, aż do ustalenia się w tworniku sem E.
Ja to widzę tak:
1. Prąd wzbudzania wytwarza strumieo ϕ
R
2. Strumieo indukuje siłę elektromotoryczną E (bez pola remanencji by się nie dało?)
3. W obwodzie zamkniętym popłynie na razie niewielki prąd, który zwiększy strumieo ϕ
R
4. Wszystko od nowa aż do ustalenia się sem.
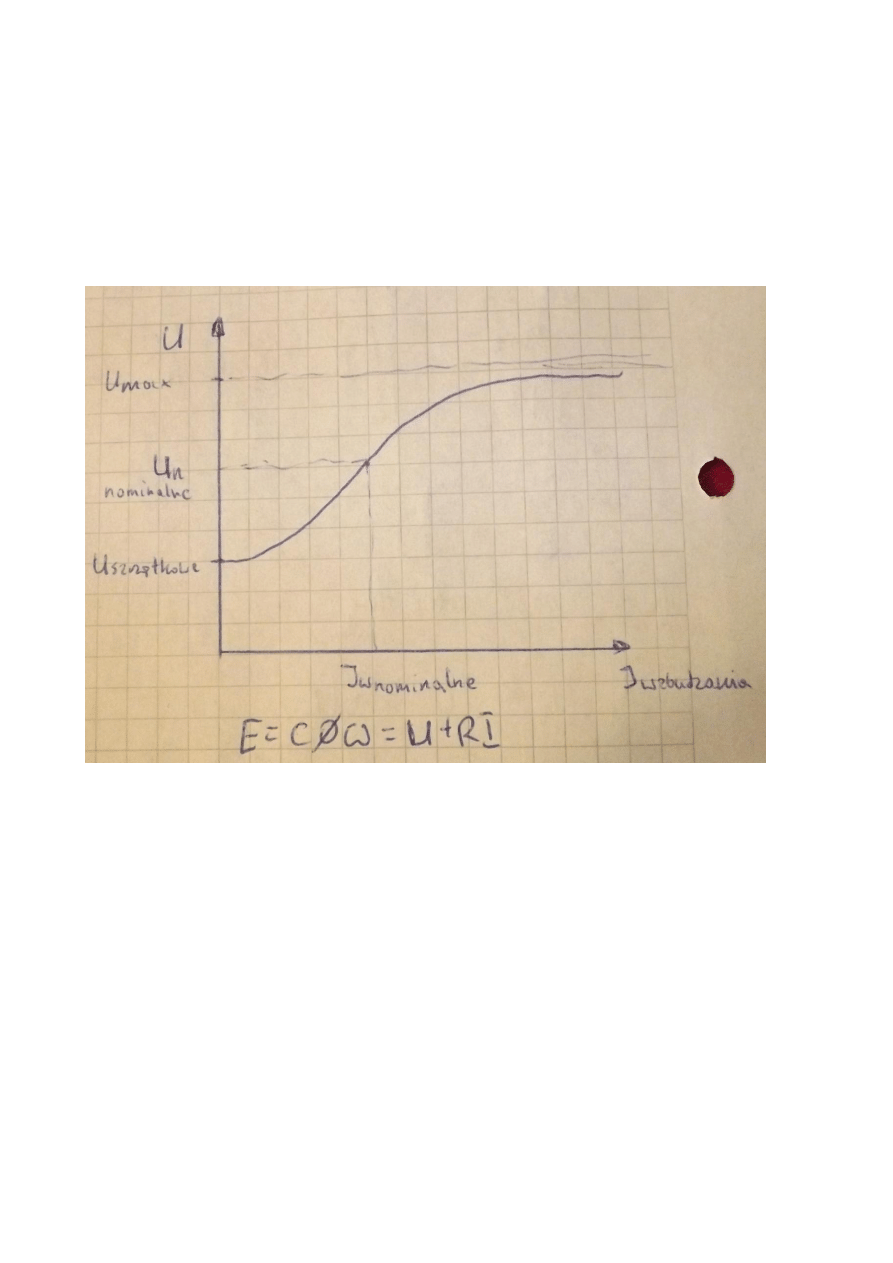
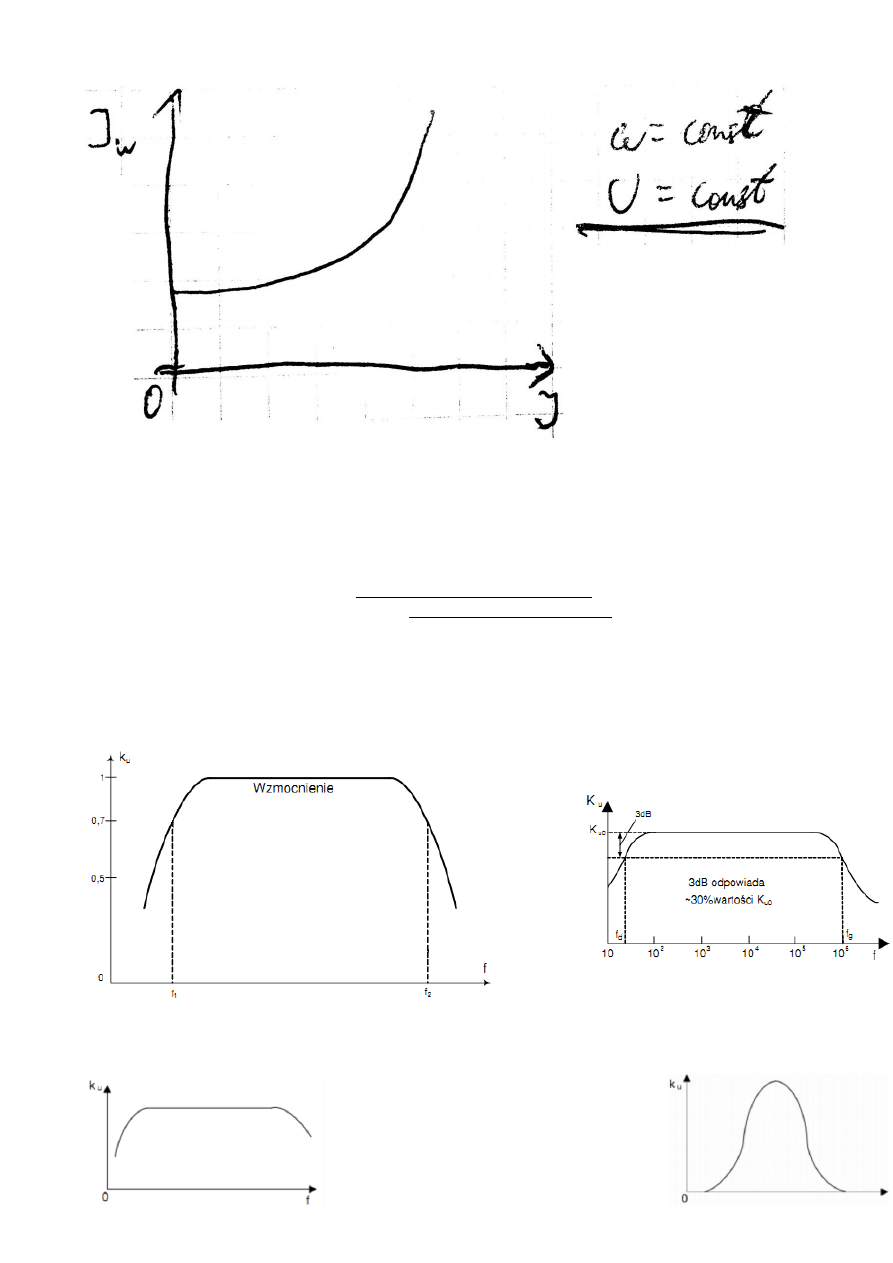
13. Omówid charakterystykę regulacyjną prądnic prądu stałego.
Charakterystyką regulacyjną prądnicy jest zależnośd prądu wzbudzenia I
w
od prądu obciążenia I przy stałej
prędkości obrotowej wirnika ω i przy stałym napięciu U na zaciskach prądnicy. Określa ona możliwośd
stabilizacji napięcia U dla różnych wartości prędkości obrotowej ω. Przy wzroście ω trzeba zmniejszyd
strumieo ϕ, żeby utrzymad stałą wartośd siły elektromotorycznej E:
E=cΦω
15) Narysowad i omówid charakterystyki fazowe i amplitudowe wzmacniacza. Odnieśd to do
charakterystyki napięciowej lub prądowej punktu pracy wzmacniacza.
Współczynniki K
u
i Ki nazywane są odpowiednio współczynnikami wzmocnienia napięciowego i
wzmocnienia prądowego lub w skrócie wzmocnieniem napięciowym lub prądowym. W wielu przypadkach
ważna jest zależnośd współczynnika wzmocnienia od częstotliwości przy sinusoidalnym napięciu lub prądzie
wejściowym. Zależnośd taka zwie się charakterystyką częstotliwościową wzmacniacza (charakterystyka
częstotliwościowa bywa określana także jako charakterystyka amplitudowa). Wzmocnienie napięciowe,
prądowe czy mocy wzmacniaczy często określa się w jednostkach miary logarytmicznej decybelach (dB).
Przy określonej częstotliwości lub w określonym paśmie charakterystyka amplitudowa ma maksimum
równe K
u0
. Dwie częstotliwości, przy których wzmocnienie ulega zmniejszeniu o pewną wartośd są
nazywane częstotliwościami granicznymi: dolną f
d
i górną f
g
. We wzmacniaczach elektronicznych przyjęto
określad częstotliwości f
d
i f
g
na poziomie, przy którym wzmocnienie ulega zmniejszeniu do wartości
K
u0
/ √2 (co w mierze logarytmicznej odpowiada zmniejszeniu o 3 dB).
Wzmacniacze prądu zmiennego mogą
wykazywad stałą wartośd współczynnika wzmocnienia w szerokim (wzmacniacz szerokopasmowy) lub
wąskim zakresie częstotliwości (wzmacniacz selektywny lub rezonansowy).
ch. częstotliwościowa pasmowa
ch. częstotliwościowa
selektywno-rezonansowa
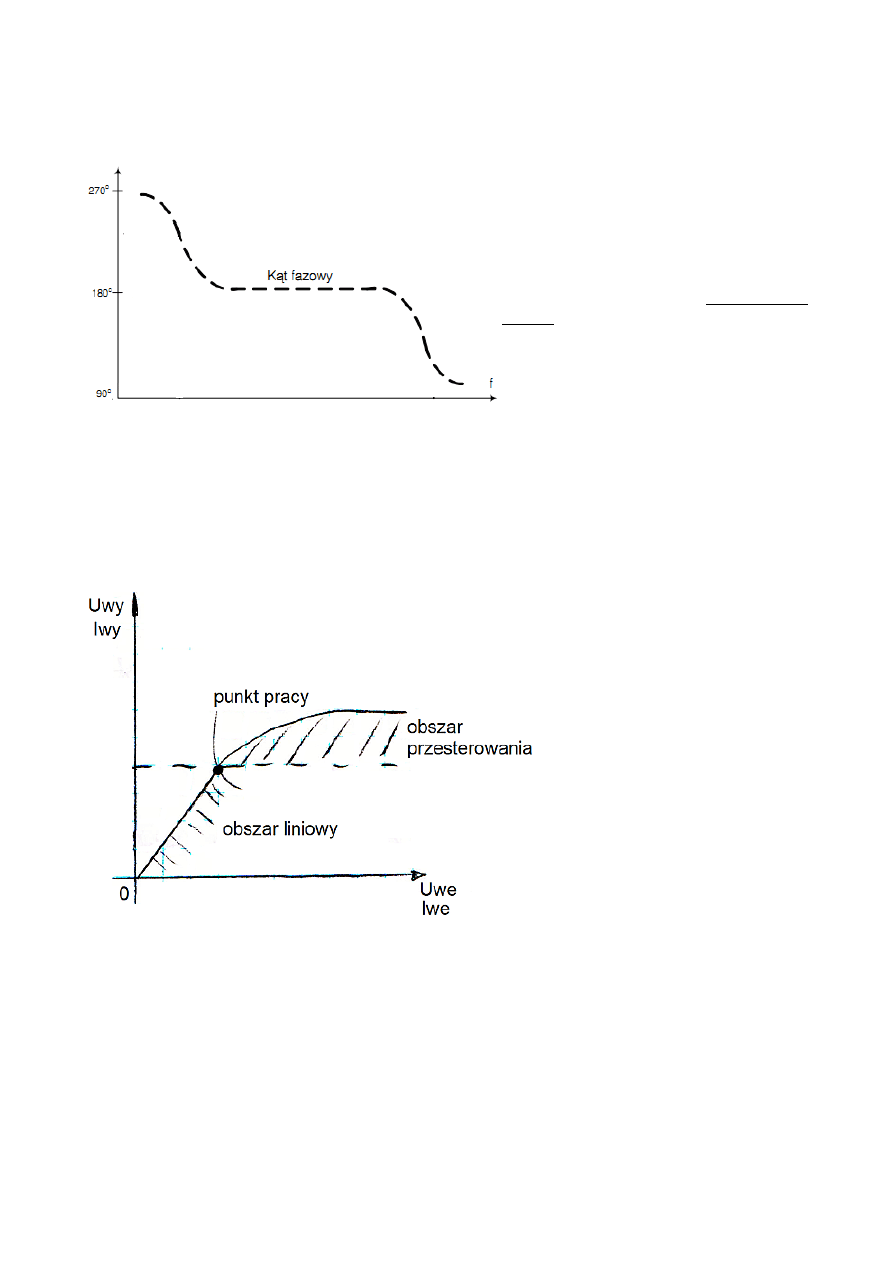
Jeżeli napięcie wejściowe zmienia się w
sposób sinusoidalny, to napięcie wyjściowe
jest w stosunku do napięcia wejściowego
przesunięte w fazie o kąt φ, który jest zależny
od częstotliwości napięcia wejściowego.
Zależnośd kąta przesunięcia fazowego od
częstotliwości nosi nazwę charakterystyki
fazowej wzmacniacza.
Pomiędzy wielkościami wejścia a wyjścia istnieją zależności:
U
wy
= K
U
U
we
I
wy
= K
I
I
we
Zależnośd wielkości wyjściowej od wielkości wejściowej U
2
= f (U
1
) lub I
2
= f (I
1
) nosi nazwę
charakterystyki sterowania wzmacniacza (lub ch. wzmocnienia). Charakterystyka ta powinna byd liniowa,
jednak wskutek nieliniowości charakterystyki lamp lub tranzystorów ulega ona zakrzywieniu przy większych
amplitudach. Wzmacniacze wykorzystuje się przeważnie w zakresie ich liniowej charakterystyki, przy
których współczynniki wzmocnienia są stałe, niezależne od wartości wielkości wejściowej. Napięcie, które
ogranicza obszar liniowego zastosowania wzmacniacza nazywa się napięciem przesterowania.
16) Omówid sprzężenie zwrotne przy przeanalizowaniu sygnału sprzężenia zwrotnego przy jego znaku
dodatnim i ujemnym.
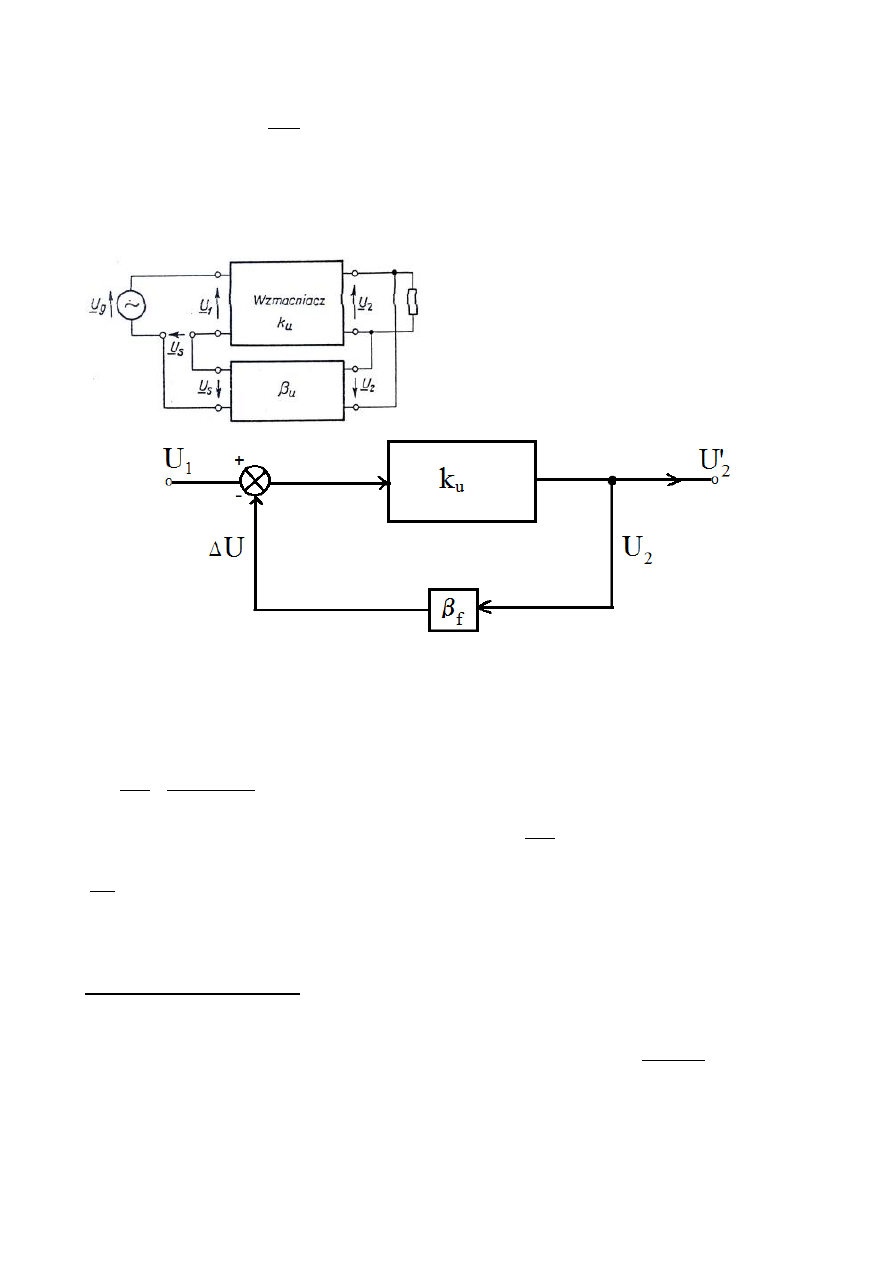
Proste układy wzmacniające posiadają szereg niekorzystnych właściwości. Można je polepszyd stosując
sprzężenie zwrotne. Polega ono na skierowaniu części energii z obwodu wyjściowego do jego obwodu
wejściowego.
W prostym układzie wzmacniającym (bez sprzężenia zwrotnego) współczynnik wzmocnienia
napięciowego wynosi:
k
u
=
U
wyj
U
wej
Wzmacniacz ze sprzężeniem zwrotnym otrzymuje się w ten sposób, że do zacisków wyjściowych
przyłącza się nowy obwód, zwany obwodem sprzężenia zwrotnego, za pomocą którego częśd napięcia
wyjściowego doprowadza się do zacisków wejściowych.
<- schemat blokowy z instrukcji do laborek
U
1
' = U
1
- ΔU
Przy napięciu U
2
na prawych zaciskach obwodu sprzężenia, na lewych zaciskach otrzymujemy napięcie
ΔU = U
2
· β
f
β
f
to współczynnik wzmocnienia wzmacniacza w pętli (współczynnik sprzężenia zwrotnego).
k
u
=
U
2
'
U
1
'
=
U
2
'
U
1
−
β
f
U
2
'
Współczynnik sprzężenia układu ze sprzężeniem zwrotnym:
k
u
'=
U
2
'
U
1
k
u
'
k
u
=1−
β
f
k
u
'
Można wyróżnid dwa przypadki:
1) dodatnie sprzężenie zwrotne
Napięcie sprzężenia zwrotnego dodaje się w zgodnej fazie do napięcia wejściowego:
β
f
> 0
sgn β
f
= 1
0 < | 1 - β
f
k
u
| < 1
β
f
k
u
' → 1
k
u
' > k
u
Wzmocnienie wzmacniacza z dodatnim sprzężeniem zwrotnym określa wzór
k
u
'=
k
u
1−
β
f
k
u
.
Wypadkowe wzmocnienie k
u
' jest większe niż wzmocnienie układu bez sprzężenia (następuje
zwiększenie wzmocnienia układu). Mianownik ułamka jest wielkością zespoloną i w szczególnym przypadku,
gdy k
u
β
f
= 1 + j0 wzmocnienie wzmacniacza staje się nieskooczone. Oznacza to, że na jego wyjściu pojawi
się sygnał przy braku zewnętrznego sygnału wejściowego lub że wartośd sygnału wejściowego będzie
niezależna od zewnętrznego źródła sygnału. Układ znajduje się w stanie generacji.
Dodatnie sprzężenie zwrotne może łatwo wprowadzid układ w zakres przesterowania.
2) ujemne sprzężenie zwrotne
Napięcie sprzężenia zwrotnego ma fazę przeciwną niż napięcie wejściowe (odejmuje się):
β
f
< 0
sgn β
f
= -1
| 1 - β
f
k
u
| >1
β
f
k
u
' → -1
k
u
' < k
u
Jeśli β
f
< 0, to wzmocnienie wzmacniacza z ujemnym sprzężeniem zwrotnym można określid wzorem
k
u
'=
k
u
1+
β
f
k
u
. Wypadkowe wzmocnienie k
u
' jest mniejsze niż wzmocnienie układu bez sprzężenia
(następuje zmniejszenie wzmocnienia układu).
Ujemne sprzężenie zwrotne stosuje się w celu stabilizacji pracy wzmacniacza. Odgrywa ono ważną rolę,
gdyż parametry poszczególnych egzemplarzy danego typu tranzystorów są na ogół różne i zależą one od
czynników takich jak punkt pracy temperatura, czas (starzenie). Stosuje się je przede wszystkim we
wzmacniaczach, których głównym zadaniem jest utrzymanie stałej i ściśle określonej wartości wzmocnienia
niezależnie od czynników zakłócających.
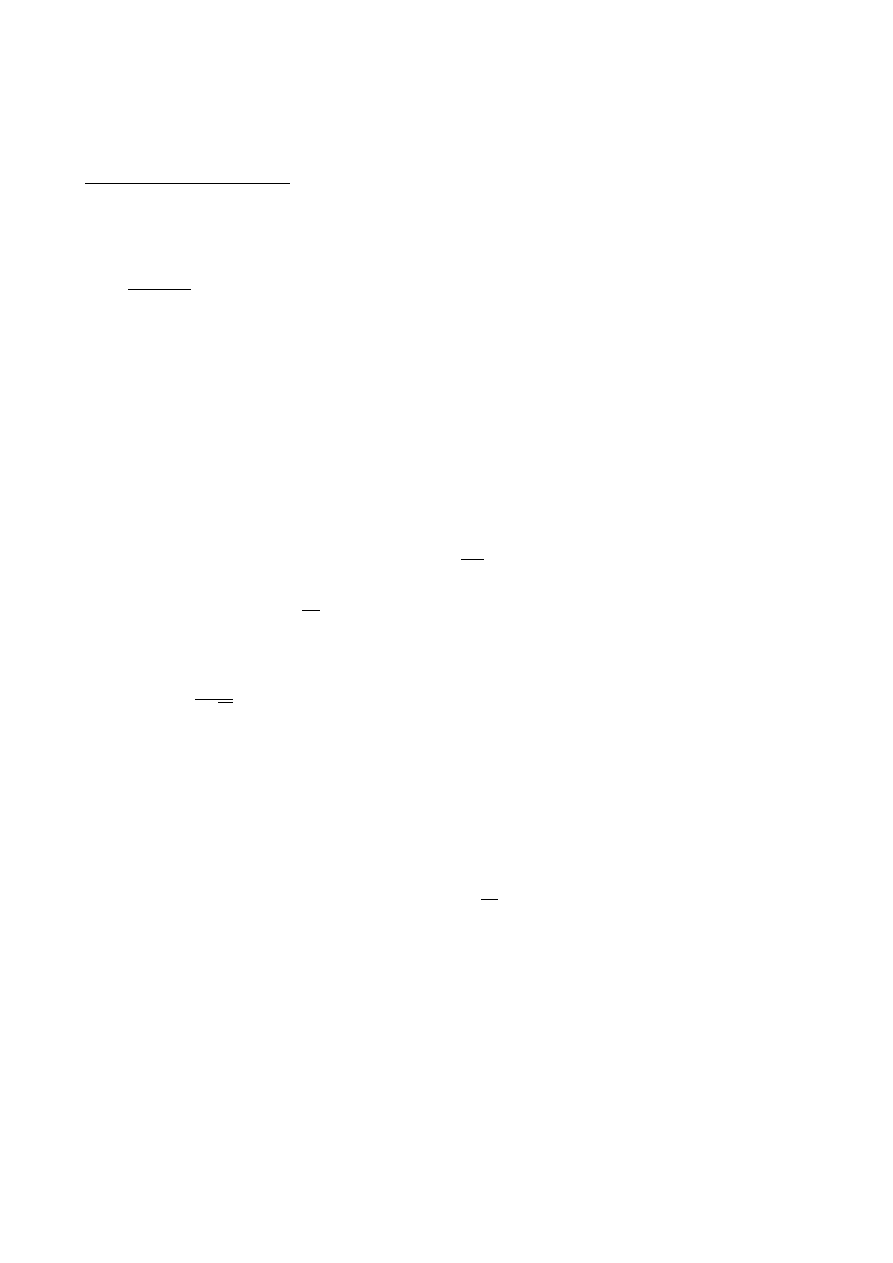
17) Narysowad schemat i omówid działanie rezonansowego generatora przebiegów sinusoidalnych.
Źródłem drgao w generatorach sinusoidalnych jest najczęściej obwód rezonansowy, złożony z równolegle
połączonych indukcyjności L i pojemności C. Ładunki zgromadzone w kondensatorze powodują powstanie
pola elektrycznego o energii określonej wzorem:
=
2
. Ładunki zgromadzone na kondensatorze
powodują przepływ prądu przez cewkę. Prąd ten wytworzy strumieo magnetyczny, w którym będzie
zmagazynowana energia
𝑚
=
2
. Cewka staje się źródłem prądu ładującego kondensator. Prąd w
obwodzie LC będzie miał charakter okresowo zmienny. Z powodu rezystancji obwodu, częśd energii będzie
się za każdym razem zamieniad na ciepło, aż do wyczerpania energii. Powstaną drgania gasnące. Okres
drgao T jest tutaj wielkością stałą. Częstotliwośd drgao f=1/T zależy od parametrów obwodu i określona jest
zależnością 𝑓 =
1
2 √
. Aby otrzymad drgania niegasnące konieczne jest uzupełnienie strat energii poprzez
dodatnie sprzężenie zwrotne w obwodzie LC wskutek istnienia rezystancji R przewodów i cewki
indukcyjnej.
Konieczne jest przy tym spełnienie dwóch warunków:
Warunek amplitudy, określający potrzebną wartośd współczynnika sprzężenia zarotnego niezbędna
do potrzymania stałej amplitudy drgao
=
1
Warunek fazy, który mówi, że suma przesunięd fazowych wzmacniaczy i obwodu sprzężenia
zwrotnego musi byd równa zeru.
W zależności od realizacji układu sprzężenia rozróżnia się trzy zasadnicze układy generacyjne: układ
Meissnera, układ Colpitsa oraz układ Harleya.
Opisy do rysunków:
a) Schemat obwodu rezonansowego RC
b) Powstawanie drgao gasnących w obwodzie rezonansowych
c) Schemat blokowy generatora ze sprzężeniem zwrotnym.
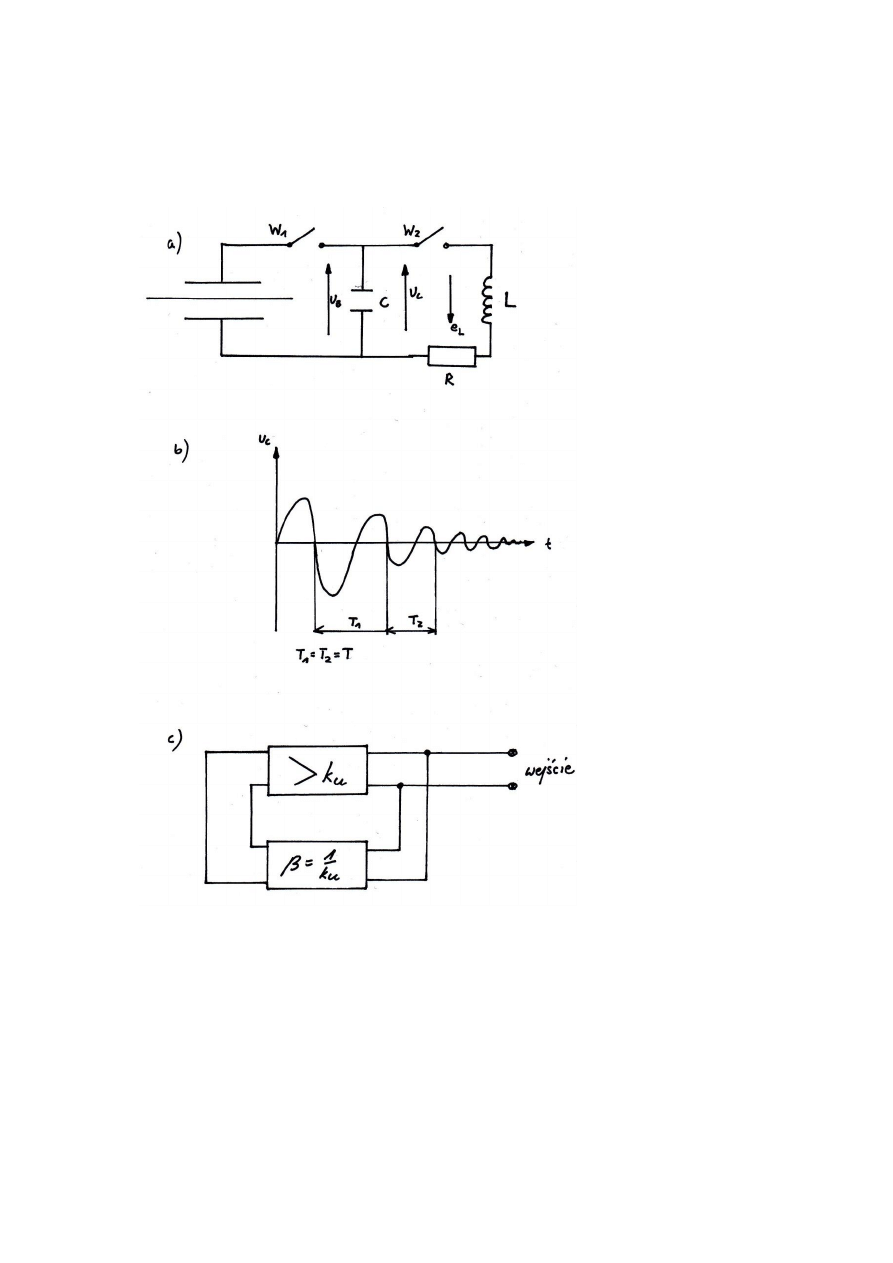
18) Narysowad i omówid działanie relaksacyjnego generatora impulsów piłokształtnych.
Drgania relaksacyjne są to drgania o przebiegu wolno narastającym, a następnie szybko zanikającym, tzw.
piłokształtnym. Prosty układ przedstawiony jest na rysunku obok. Po zamknięciu wyłącznika W napięcie na
kondensatorze wzrasta wg. Krzywej wykładniczej tym wolniej, im większa jest rezystancja R, ograniczając
prąd ładowania. Po osiągnieciu pewnego napięcia następuje szybkie rozładowanie kondensatora i spadek
napięcia na jego okładzinach . Pros ten cyklicznie się powtarza. Częstotliwośd drgao relaksacyjnych można
regulowad przez zmianę parametrów R i C układu. Największe zastosowanie takie generatory znajdują w
układach lamp oscyloskopowych i kineskopowych.
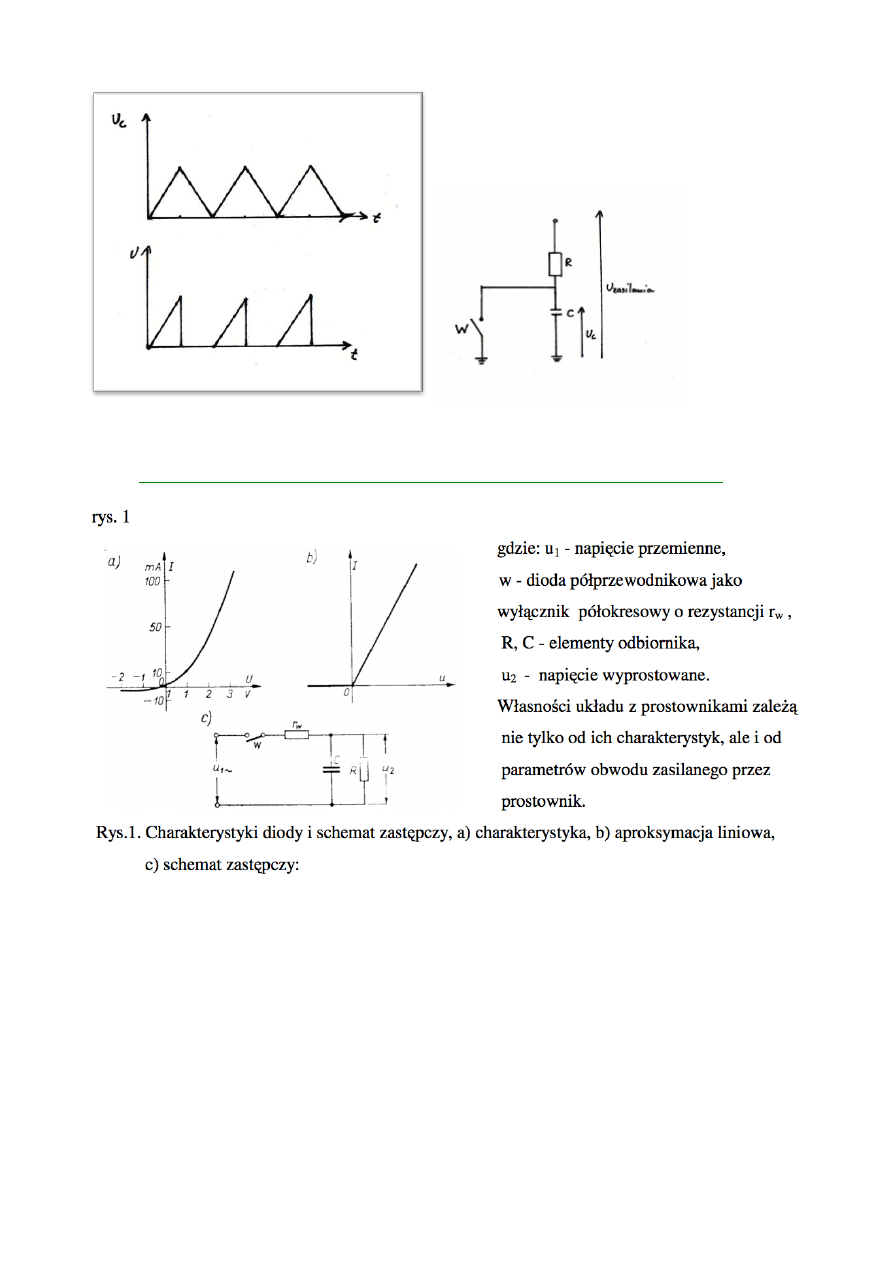
19. Narysowad i omówid charakterystykę prądowo-napięciową diody normalnej i Zenera.
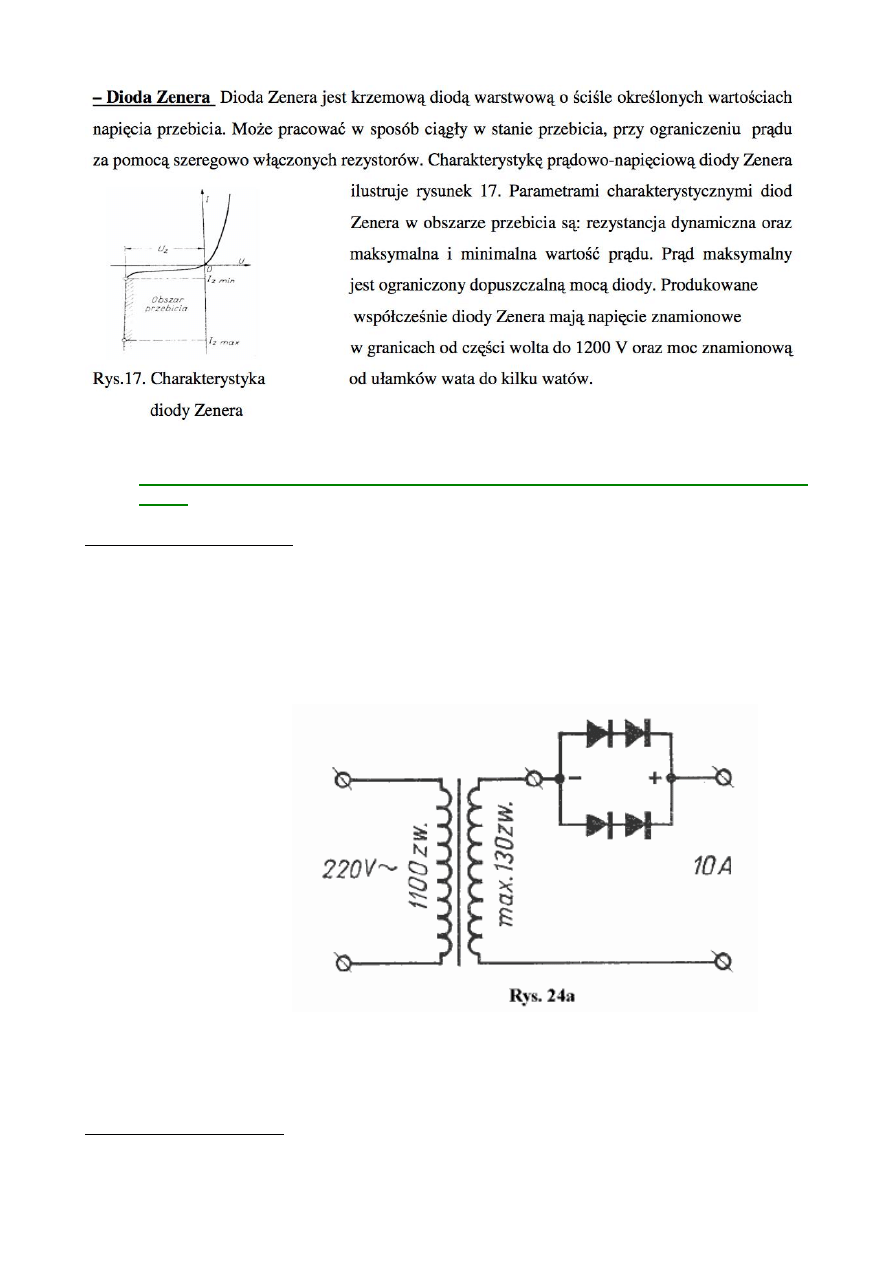
20) Narysowad i omówid prostowanie jedno i dwu połówkowe. Omówid mostek trójfazowy i mostek
Gretza.
Prostowanie jednopołówkowe
Najprostszym prostownikiem jest pojedyncza dioda prostownicza wpięta w układ napięcia przemiennego.
Pomimo prostoty takiego układu jest on bardzo rzadko stosowany z uwagi na występowanie
dużego tętnienia napięcia wyjściowego. Dodatkowo, energia dostarczana przez źródło wykorzystywana jest
tylko przez pół okresu - podczas drugiej połowy okresu napięcie jest po prostu blokowane i prąd w układzie
nie płynie. Wprowadza to niesymetrię obciążenia układu prądu przemiennego, co jest niekorzystne dla sieci
prądu przemiennego. Z powyższych powodów rozwiązanie stosowane tylko w układach niewielkiej mocy.
Rozwiązanie
to
jest
powszechnie stosowane w
zasilaczach
impulsowych
małych mocy.
Rys. 24a – Prostowanie
jednopołówkowe
Prostowanie dwupołówkowe
Prostowniki dwupołówkowe umożliwiają wykorzystanie mocy źródła napięcia przemiennego przez cały
okres. Napięcie wyjściowe takiego prostownika charakteryzuje się mniejszymi tętnieniami niż w przypadku
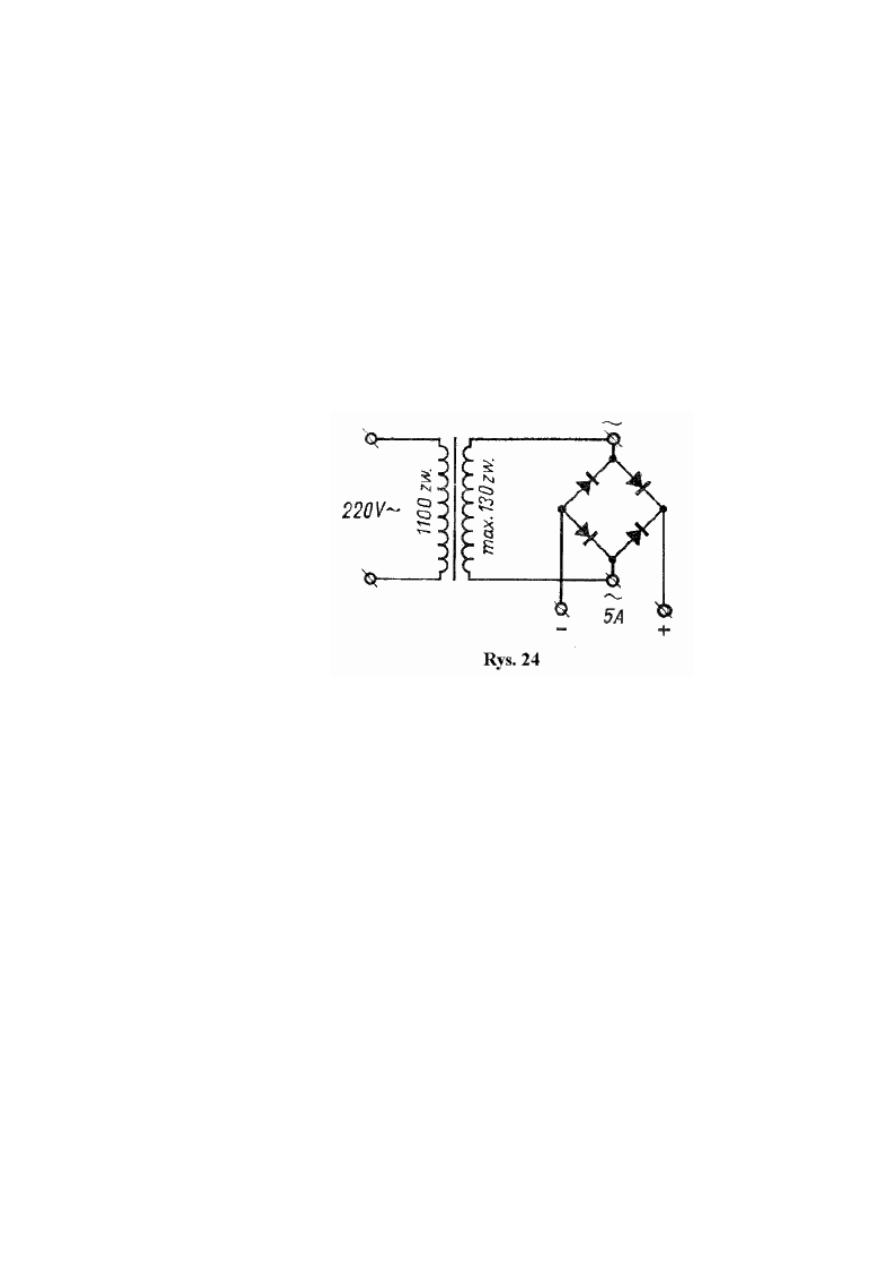
prostowników jednopołówkowych. Jedyną wadą jest to, że układ elektryczny jest nieznacznie bardziej
skomplikowany. Układ mostkowy, tzw. mostek Graetza, wykorzystuje cztery diody prostownicze, i pozwala
na prostowanie napięcia z dowolnego źródła przemiennego. Istnieje również konstrukcja oparta na dwóch
diodach, jednak wymaga ona specjalnego zasilania - uzwojenie wtórne transformatora musi byd podzielone
na dwie jednakowe części. Obecnie układy takie stosuje się niezwykle rzadko, ponieważ koszt dzielonego
uzwojenia jest znacznie większy niż koszt diod użytych w układzie mostkowym.
Obecnie jednym z najczęściej stosowanych prostowników jednofazowych jest mostek Graetza. Proces
prostowania napięcia przebiega w dwóch etapach. W pierwszej połówce okresu przewodzą tylko dwie diody
tak jak to pokazano na rysunku obok (pozostałe dwie diody są spolaryzowane zaporowo). W drugiej
połówce okresu sytuacja ulega odwróceniu - przewodzą dwie pozostałe diody . Napięcie wejściowe jest
napięciem przemiennym czyli zmienia swój kierunek na dodatni i ujemny, natomiast układ mostka jest tak
skonstruowany, że napięcie wyjściowe jest jednokierunkowe - płynie tylko w kierunku dodatnim (patrz
również rysunek powyżej). Pomimo faktu, że napięcie wyjściowe prostownika jest jednokierukowe to jednak
nie jest ono napięciem stałym i wykazuje znaczne tętnienie - dlatego też prostowniki najczęściej stosuje się z
odpowiednimi filtrami
dolnoprzepustowymi wygładzający
mi przebieg.
Rys. 24 – Prostowanie
dwupołówkowe
Mostek Graetza to pełnookresowy prostownik z czterech diod prostowniczych połączonych w specyficzny
układ prostujący prąd przy wykorzystaniu obu połówek napięcia przemiennego (prostownik
dwupołówkowy). W układzie takim niezależnie od kierunku przepływu prądu na wejściu prąd na wyjściu
płynie zawsze w tę samą stronę. W określonej chwili dwie z tych diod pracują przy polaryzacji w kierunku
przewodzenia, a dwie w kierunku zaporowym; przy zmianie kierunku prądu wejściowego te pary zamieniają
się rolami. Mostek ten jest czwórnikiem - ma dwa zaciski wejściowe (napięcie przemienne) oraz dwa zaciski
wyjściowe.
Mostki prostownicze Graetza mogą byd produkowane w postaci scalonej lub budowane z niezależnych diod.
Współcześnie konstruowany jest prawie wyłącznie na krzemowych diodach półprzewodnikowych. Dawniej
produkowano
mostki
wykorzystując prostowniki
diody germanowe i prostowniki
kuprytowe (tylko w zastosowaniach bardzo małej mocy, np. w układach pomiarowych)
Ze względu na kłopoty z zabezpieczeniem obwodów żarzenia przed przebiciem do katod, prostowniki w
układzie Graetza niezwykle rzadko były budowane na lampach; lampowe prostowniki dwupołówkowe
budowano niemal wyłącznie przy użyciu dwóch diod lampowych albo jednej duodiody z dwiema anodami.
Rozwiązanie takie wymagało uzwojenia transformatora zasilającego z wyprowadzonym odczepem ze środka.
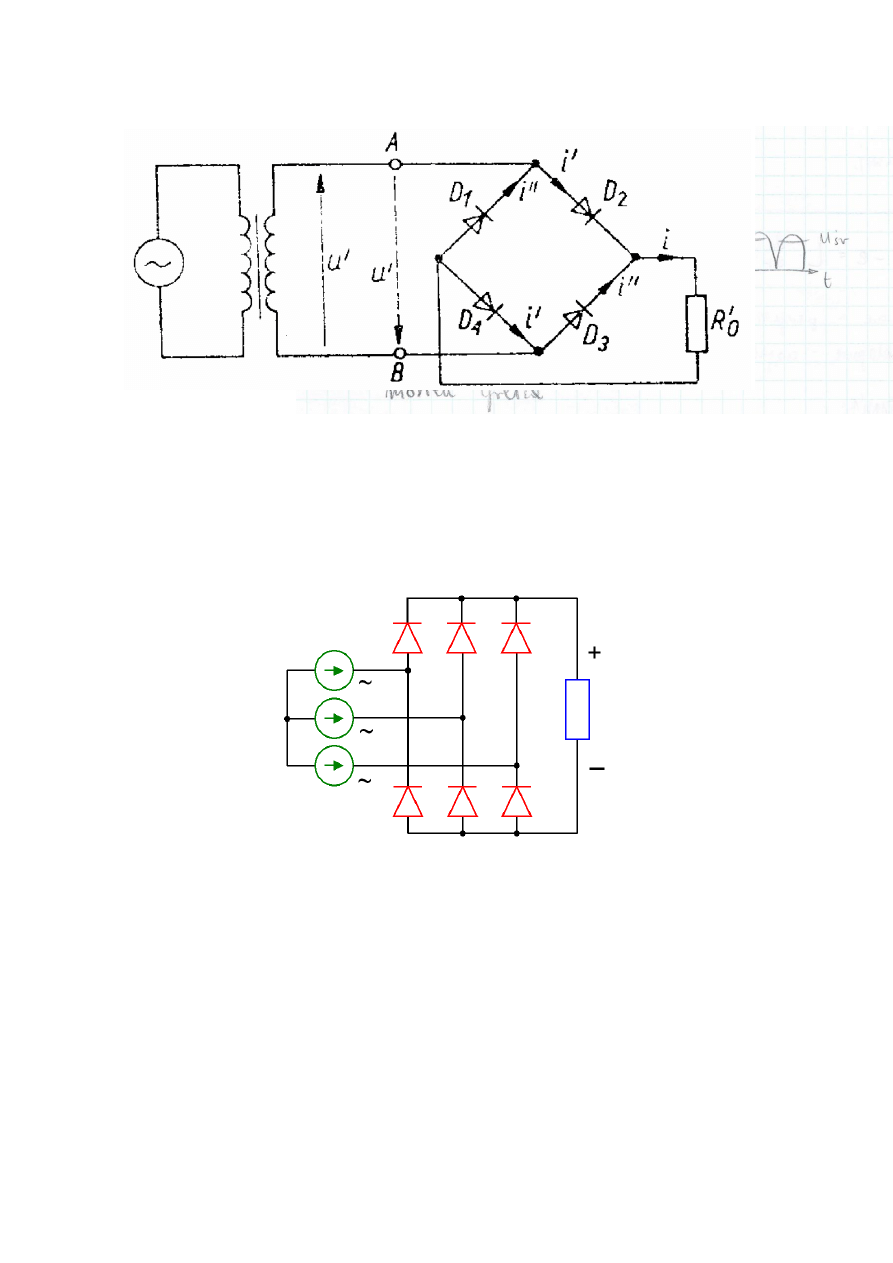
Mostek trójfazowy
Trójfazowy mostek prostowniczy jest rozszerzeniem idei mostka Graetza – z tą różnicą, że połączone są trzy
gałęzie równoległe do których odpowiednio podłączone jest napięcie zasilania. Zasada działania jest
identyczna do jednofazowego mostka Graetza opisanego powyżej.
Mostki prostownicze stosuje się również w układach wielofazowych. Mostek wielofazowy jest rozszerzeniem
układu jednofazowego – liczba gałęzi odpowiada liczbie faz układu wielofazowego.
21. Narysowad i omówid schemat prostownika sterowanego jednofazowego.
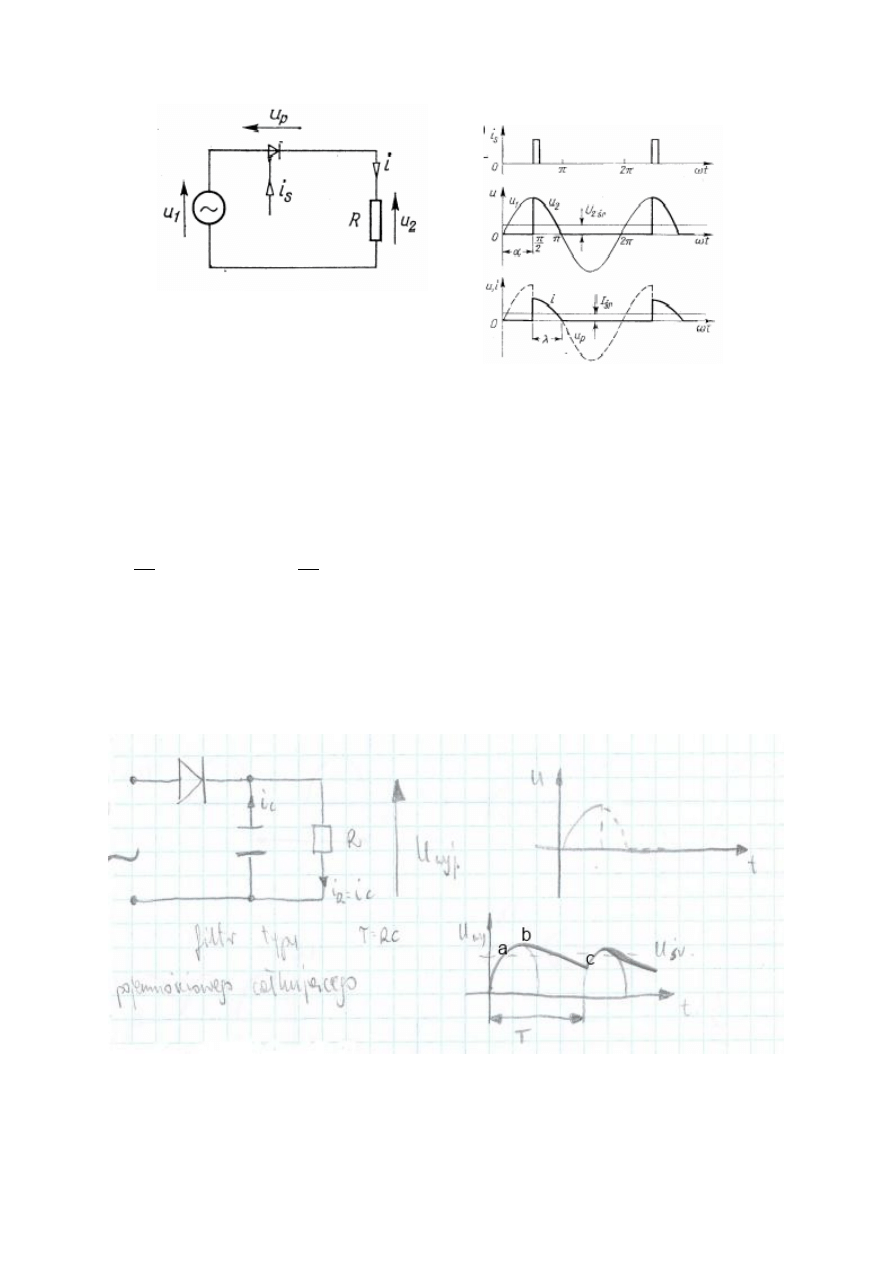
Przy braku impulsów sterujących w obwodzie bramki tyrystor nie przewodzi prądu. Wyzwolenie tyrystora
impulsem prądowym może nastąpid tylko w czasie dodatniej półsinusoidy napięcia. Z rysunku wynika, że im
wcześniej nastąpi wyzwolenie tyrystora, tym większe są średnie wartości prądu i napięcia wyprostowanego.
Tyrystor może byd wysterowany najwcześniej w chwili odpowiadającej początkowi dodatniej półfali
napięcia zasilającego. Kąt liczony od tej chwili do chwili wyzwolenia tyrystora nazywa się kątem opóźnienia
włączenia. Dla czasu przechodzenia sinusoidy napięcia przez zero, tyrystor przechodzi w stan zaporowy i
może byd włączony impulsem sterującym przy dodatniej półfali napięcia następnego cyklu. Zmieniając kąt
opóźnienia można regulowad wyprostowane od zera do pełnej wartości średniej, jak w przypadku
prostownika niesterowanego. Średnią wartośd napięcia dla danego kąta oblicza się z zależności:
U
2śr
= 1
2π
∫
α
π
U
m
sinωtd (ωt )= 1
2π
U
m
(1+cosα)
22. Narysowad i omówid schematy filtrów: pojemnościowego i indukcyjnego oraz narysowad
charakterystykę (w funkcji czasu) napięciową z zaznaczeniem oceny zmiany współczynnika tętnieo
napięcia.
Prostownik jednopołówkowy z filtrem pojemnościowym
W dodatnim półokresie napięcia zasilającego kondensator ładuje się w przedziale czasowym od a do b. Gdy
wartośd chwilowa napięcia przemiennego na uzwojeniu wtórnym transformatora będzie mniejsza niż
napięcie stałe na kondensatorze, wtedy dioda przestaje przewodzid i prąd ładowania nie płynie. W
przedziale czasowym od b do c kondensator rozładowuje się i dostarcza energię do obciążenia. Począwszy
od punktu c cykl powtarza się. Wartośd tętnieo zależy od wartości C, R'
o
i rezystancji diody w kierunku
przewodzenia.
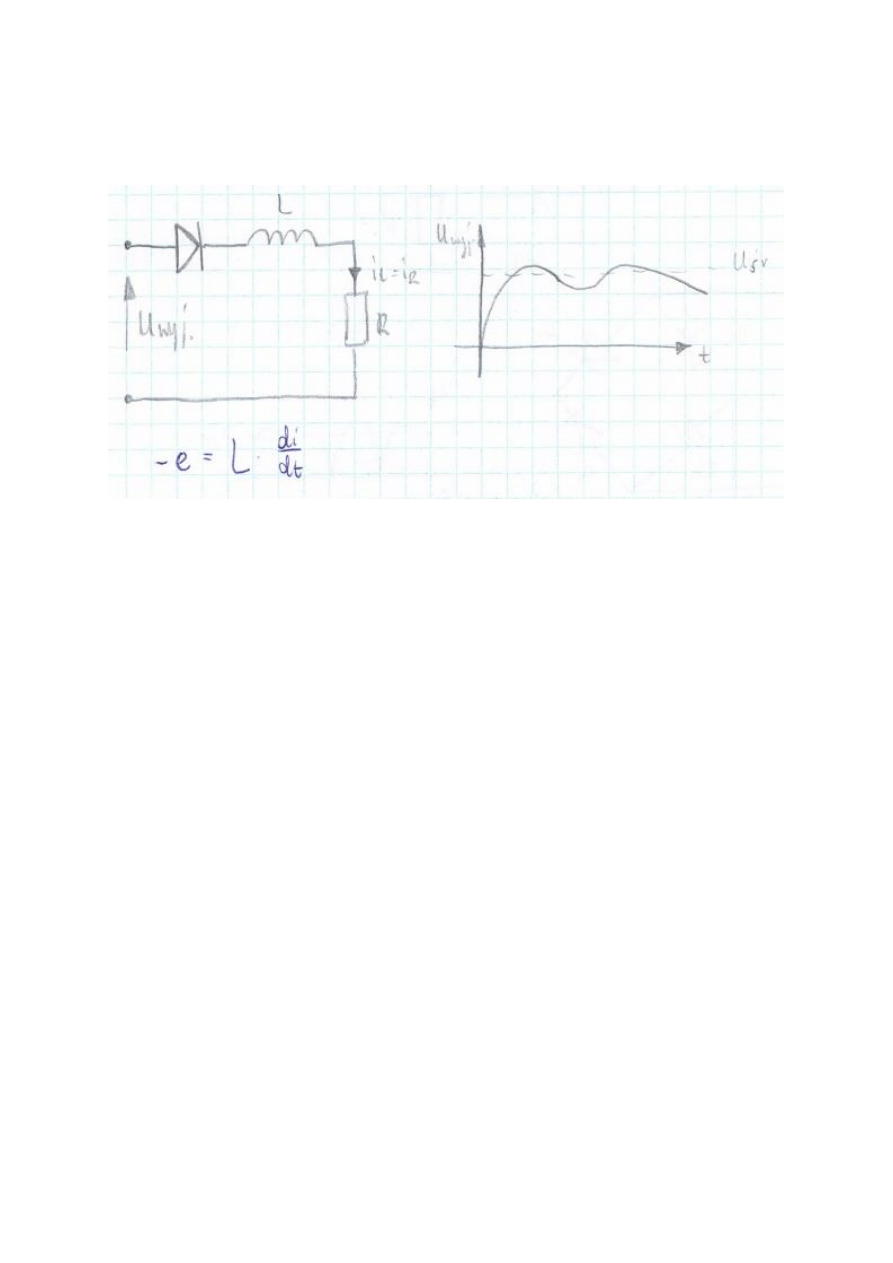
Prostownik jednopołówkowy z filtrem indukcyjnym
Działanie filtru indukcyjnego polega na magazynowaniu energii w polu magnetycznym dławika
indukcyjnego gdy chwilowa wartośd prądu w obwodzie narasta i oddawaniu zmagazynowanej energii gdy
chwilowa wartośd prądu maleje. W dławiku indukcyjnym indukuje się siła elektromotoryczna, która zawsze
przeciwdziała zmianom chwilowej wartości prądu płynącego przez dławik.
Gdy chwilowa wartośd prądu ma tendencję do wzrostu indukowana siła elektromotoryczna hamuje ten
wzrost i jednocześnie magazynowana jest energia w polu magnetycznym. Kiedy wartośd chwilowa prądu
maleje to energia pola magnetycznego oddawana jest do obwodu, a indukowana siła elektromotoryczna
powoduje podtrzymanie przepływu prądu. W rezultacie zmniejszają się tętnienia prądu odbiornika.
Wyszukiwarka
Podobne podstrony:
Egzamin zaoczne
Pytania egzaminacyjneIM
ANALIZA WYNIKÓW EGZAMINU GIMNAZJALNEGO DLA UCZNIÓW KLAS III
zadania egzaminacyjne
Egzamin 2008 2009
Egzamin poprawkowy I 2009 2010
Egzamin II ze statystyki luty 2007
312[01] 01 122 Arkusz egzaminac Nieznany (2)
Egzamin praktyczny Zadanie Nr 4
konta egzaminacyjne id 246765 Nieznany
EGZAMIN PKM2 pytania2011
na co nalezy zwrocic uwage przygotowujac uczniow do nowego ustnego egzaminu maturalnego
Egzamin z RP2 31 stycznia 2009 p4
piot egzamin
Egzamin 2005 1(1)
więcej podobnych podstron