
Temat ćwiczenia:
„Jednofazowy prostowniki filtr aktywny”
Prowadzący:
dr inż. Adam Penczek
2
I PRZEBIEG ZAJĘĆ
I.1 Jednofazowy prostownik-filtr aktywny – wstęp teoretyczny i badania
symulacyjne.
I.1.1 Wprowadzenie teoretyczne
Omówienie problematyki jakości energii elektrycznej oraz metod jej poprawy
I.1.2 Demonstracja działania układu rzeczywistego
Opis stanowiska laboratoryjnego
Rejestracja przebiegów za pomocą oscyloskopu
I.1.3 Opis modelu symulacyjnego 1 fazowego prostownika-filtru aktywnego z
bipolarną modulacją napięcia (PFA) wykonanego w Matlab Simulink
(do dyspozycji studentów bazowy projekt),
I.1.4 Badania symulacyjne dla różnych warunków pracy.
Materiały dodatkowe:
Pliki źródłowe MATLAB SIMULINK z modelem 1-fazowego PFA,
Penczek A. "Jednofazowy filtr aktywny ze stabilizacją napięcia
wyprostowanego oraz stałą częstotliwością przełączeń". Materiały konferencji
„II Ogólnopolskie Warsztaty Doktoranckie” Wydział Elektryczny Politechniki
Śląskiej w Gliwicach, PTETiS Oddział w Gliwicach. Istebna 22-25 X 2000.
Archiwum Konferencji PTETiS Vol. 9/2000 str. 81-88.
3
I.2 Jednofazowy prostownik-filtr aktywny – realizacja praktyczna
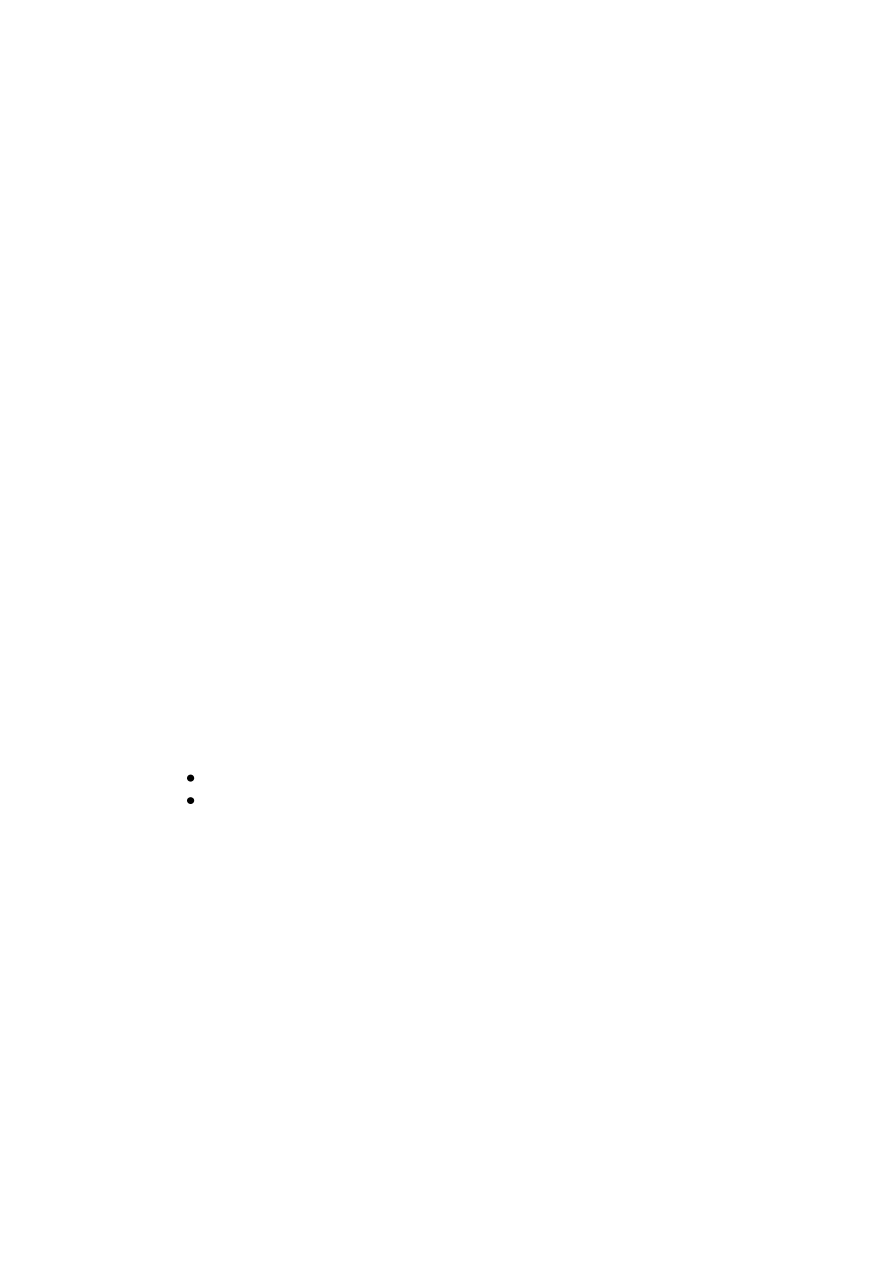
I.2.1 Omówienie i demonstracja podzespołów, z których zbudowane jest stanowisko
laboratoryjne:
a) część silnoprądowa
- układ mocy,
- aparatura stykowo załączająca,
- układ pomiaru sygnałów prądowych i napięciowych
b) część niskonapięciowa
- układy dopasowujące sygnały sterujące do poziomu sterowania tranzystorów
IGBT,
- moduły izolacji optycznej,
- układ kontroli napięcia wyprostowanego,
- układ bezoscylacyjnego załączenia urządzenia,
- sterownik mikroprocesorowy z procesorem DSP i układem CPLD
I.2.2 Omówienie problematyki związaniem ze stosowaniem układów
mikroprocesorowych do sterowania urządzeń energoelektronicznych.
RESET
BLOKADY
PW
ST1
PP
RM82/12
V
Układ
Kontroli
Załączenia
I Wyłączenia
(UKZW)
Układ
Kontroli
Napięcia
Stałego
(UKNS)
GIZ
T.BLOK
OBCIĄŻENIE
DC
ST1
T
BLO
K
R
r
16
Cf
1,2mF
A
ST2
Lf
9m
H
ST1
B1
WS
F
N
LEM 1
SUS
LEM 2
SUC
ZASILACZ
STER. GIZ
F
(230V)
ST1
PP
PZ
ST2
N
ST1
KONFIGURACJA
STYKOW
ST2
natomiast reszta ze sterownikiem z zasilacza +/-15V
Wszystkie GIZ'y zasilane sa z przetwornicy (i UKNS)
LEM 3
SIS
LEM 4
SIF
Sterownik DSP
Układ Optoizolacji
ST2
PPDLH
A
/C
Generator Impulsów
Załączających
(GIZ)
Wejścia i Wyjścia Cyfrowe
PRZEKSZTAŁTNIK
NAPIĘCIA
R
d
A
B
U
Z(+)
OBCIĄŻENIE
AC
4
I.2.3 Demonstracja pracy urządzenia.
Demonstracja przebiegów oscyloskopowych prądu przed i po kompensacji za pomocą
jednofazowego filtru aktywnego dla obciążenia nieliniowego (mostek diodowy)
Pomiar jakości energii elektrycznej za pomocą miernika harmonicznych
Praca prostownika diodowego - pomiar jakości energii elektrycznej dla przebiegów
prądu przed i po kompensacji za pomocą filtru aktywnego;
(wydruki przebiegów oscyloskopowych, zanotowanie wyników pomiaru jakości energii
elektrycznej)
THD
Us
THD
Is
Zawartość harmonicznych prądu
PF
DPF
3
5
7
11
13
Przed
kompensacją
Po
kompensacji
Materiały dodatkowe:
- Dokumentacja do stanowiska dydaktycznego,
- Przebiegi oscyloskopowe uzyskane w trakcie części demonstracyjnej
- Penczek A., Dębowski L., Mondzik A. "Sterowanie strukturami energoelektronicznych filtrów
aktywnych z wykorzystaniem elastycznego sytemu z procesorem DSP i złożonym reprogramowalnym
układem logicznym FPGA" Materiały konferencyjne - V Konferencja Naukowa „Sterowanie w
Energoelektronice i Napędzie Elektrycznym” (SENE'2001) Pol. Łódzka Łódź-Arturówek 14-16
listopad 2001
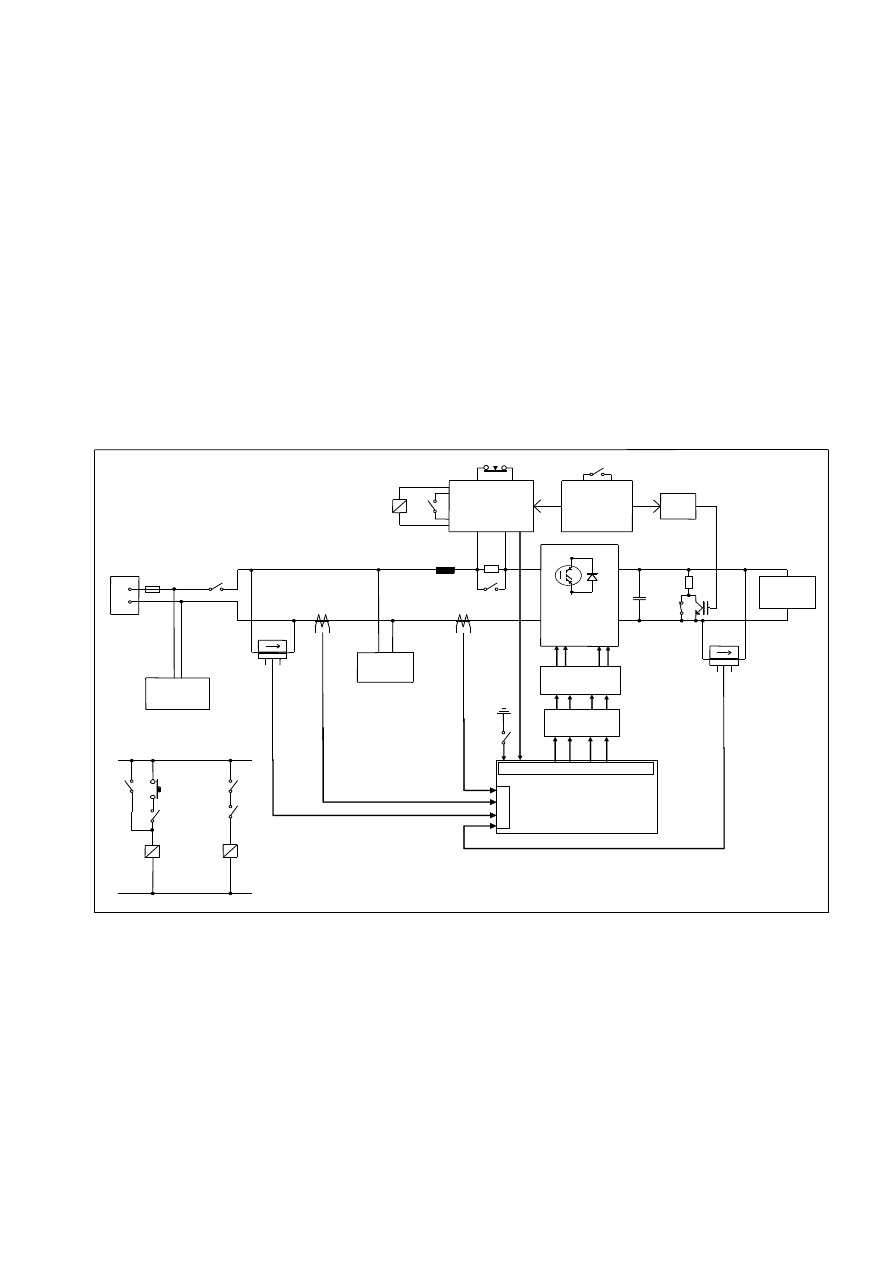
R=
1
1
5
u
s
~
i
s
i
F
i
obc
L
s
L=2mH
PFA
C=
3
,5
mF
Rys. 2 Konfiguracja układu pomiarowego:
5
II MATERIAŁY POMOCNICZE DO ZAJĘĆ
„Jednofazowy FA z bipolarną modulacją napięcia wyjściowego – teoria”
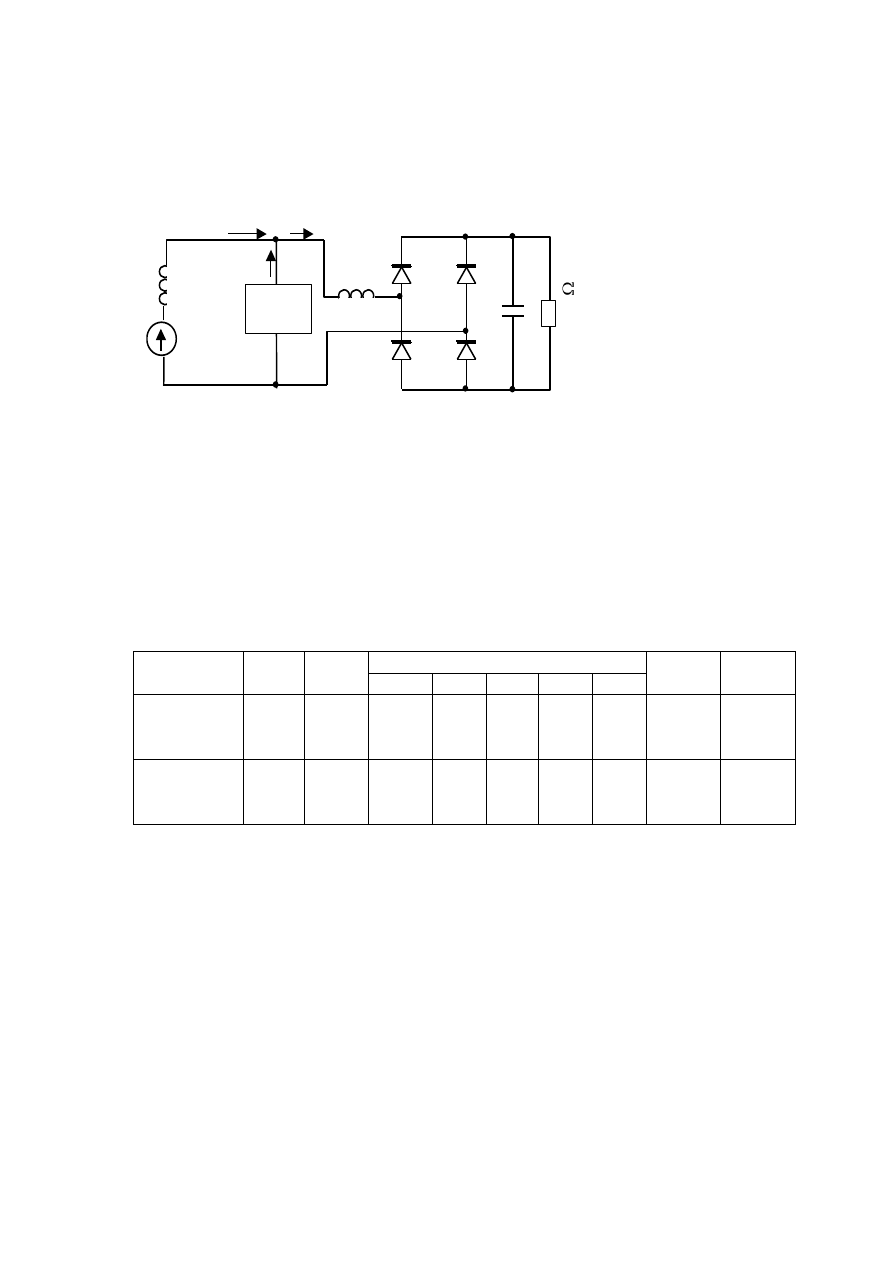
Na rys. 3 przedstawiono schemat blokowy podstawowej wersji prostownika-filtru
aktywnego pracującego z bipolarną modulacją napięcia z konwencjonalnym, histerezowym
regulatorem prądu. W przypadku filtru aktywnego pracującego w zamkniętym układzie
regulacji sygnałem zadającym dla przekształtnika jest składowa czynna prądu źródła.
Oznacza to, że układ kontrolujący pracę filtru powinien tak sterować łącznikami aby
sumaryczny prąd źródła wymuszony przez obciążenie nieliniowe oraz filtr był sinusoidalny
i w fazie z napięciem zasilającym. Poniżej, w oparciu o [1] przedstawiono skrócone
wyprowadzenie zależności pozwalających na formalizację matematyczną metodyki
sterowania jednofazowym prostownikiem-filtrem aktywnym.
Ku
XT
KS
X
2
X
2
Ki
FDP
i
dDC
+
G
T2
+
G
i
Pref
(t)
(k
u
U
(0)
)
2
L
s
i
F
i
s
L
i
L
u
d
i
d
u
d
u
s
(t)
SUS
SIS
C
SUC
k
i
i
s
(t)
k
u
u
d
(t)
k
u
u
s
(t)
Obc.
DC
H
k
i
i
s
(t
)
STEROWNIK
x
G
+
G
-
i(t)
+
-
G
Obciążenia
AC
Regulator
histerezowy
SIS
k
i
i
F
(t
)
D3
T1
D1
T3
D2
T4
D4
i
c
Rys 3 Schemat blokowy prostownika-filtru aktywnego z bipolarną modulacją napięcia – wersja
podstawowa
6
Obwód silnoprądowy przedstawiony na rys.1 opisuje układu równań (II.1) gdzie jako
zmienne stanu przyjęto prąd źródła – i
s
oraz napięcia na kondensatorze - u
d ,
przy czym dla
modulacji bipolarnej zgodnie z =+/-1 (+1 gdy załączona para T3-T2; -1 gdy T1-T4)
dt
di
L
u
u
dt
di
L
d
s
s
(II.1)
C
i
i
i
dt
du
dDC
s
L
d
)
(
Zakładając, że zadawana wartość napięcia wyprostowanego wynosi U
0
, błąd regulacji
napięcia można przedstawić jako:
0
U
u
e
d
u
(II.2)
Zgodnie z przyjętym na początku założeniem, że sygnał prądu wzorcowego (i
Pref
) dla
przekształtnika jest sinusoidalny i współfazowy z napięciem zasilającym, można go zapisać
w postaci :
s
ef
u
G
i
Pr
gdzie G – konduktancja zastępcza obciążeń
(II.3)
Stąd otrzymuje się zależność na przebieg sygnału błędu prądu :
ef
s
i
i
i
e
Pr
(II.4)
Zgodnie z [1], powierzchnia przełączeń dokonywanych przez regulator histerezowy
realizujący sterowanie ślizgowe przedstawianym układem jest określona następująco :
0
u
u
i
i
e
K
e
K
(II.5)
gdzie:
K
i
, K
u
– współczynniki wagi błędu realizacji zadawanego w układzie regulacji prądu
źródła (e
i
) i napięcia wyprostowanego (e
u
)
Z zależności II.5 wynika, że przy założeniu, iż =0 jeden z błędów jest liniowo zależny od
drugiego. Oznacza to, że w opisywanym układzie drugiego rzędu do sterowania ślizgowego
możną wykorzystać tylko jedną niezależną zmienną stanu a z zerowania jej błędu uczynić
funkcję celu sterowania.
W związku z powyższym, w celu realizacji funkcji celu (prąd źródła powinien być
sinusoidalny i współfazowy z napięciem co oznacza eliminację składowej nieaktywnej) musi
być spełniony warunek:
7
s
s
i
Gu
i
e
(II.6)
Sygnały odpowiadający rzeczywistej wartości prądu i napięcia źródła są pomiarowo
dostępne. Do realizacji (II.6) konieczne jest więc wyznaczenie konduktacji zastępczej
obciążeń znajdujących się w układzie. Ze względu na losowy charakter zmian konduktancji
zastępczej w kolejnych okresach przebiegu napięcia, założono że prąd wzorcowy dla
prostownika-filtru aktywnego realizowany w n-tym okresie (i
Pref(n)
) będzie wyliczany
w oparciu o stałą wartość konduktancji zastępczej wynikającą z uśrednionej wartości mocy
czynnej obciążeń w poprzednim (n-1) okresie.
s
n
n
ef
u
G
i
)
1
(
)
(
Pr
(II.7)
2
0
2
)
(
1
s
T
Ls
d
Ls
s
s
U
dt
i
u
i
u
T
U
P
G
(II.8)
Wartość konduktancji zastępczej obciążeń w n-tym okresie przebiegu napięcia obliczono
korzystając równania bilansu energii na końcu okresu [1].
Całkowita energia dostarczana przez układ do obciążenia w okresie (n) wynosi:
W
W
W
W
n
s n
C n
L n
( )
( )
( )
( )
(II.9)
gdzie :
T
I
U
W
n
Sp
s
n
s
)
1
(
)
(
- energia dostarczona ze źródła w okresie (n)
(II.10)
I
Sp(n-1)
- skuteczna wartość prądu czynnego źródła określona
po okresie (n-1) i realizowana w (n) okresie.
W
C
U
U
C n
d n
d n
( )
(
)
( )
(
)
2
1
2
2
-zmiana energii kondensatora
(II.11)
W
L
I
I
L n
F n
F n
( )
(
)
( )
(
)
2
1
2
2
-zmiana energii pola magnetycznego dławika
(II.12)
i
F(n-1),
i
F(n)
-
chwilowe wart. prądu wejściowego na początku
okresów (n-1) i (n)
Zmiana ilości energii dostarczonej do obciążenia w okresie (n) w stosunku do energii
dostarczonej w (n-1) okresie wynosi:
)
(
2
)
(
2
)
(
2
)
(
2
)
1
(
2
)
(
2
)
1
(
)
1
(
)
(
n
F
n
F
n
d
n
d
n
Sp
n
Sp
s
i
i
L
U
U
C
I
I
TU
W
(II.13)
Po dokonaniu kolejnych iteracji, dla i
F(0)
=0, I
p(n-1)
=0, U
d(0)
=U
0
otrzymano:
2
)
(
2
)
(
2
0
)
(
2
)
(
2
n
F
n
d
n
Sp
s
i
L
U
U
C
I
TU
W
(II.14)
8
Po przekształceniu wzoru (II.14) otrzymuje się zależność określającą wartość skuteczną
składowej aktywnej prądu obciążenia:
]
2
)
(
2
[
2
)
(
2
)
(
2
)
0
(
)
(
n
F
n
d
d
s
s
n
Sp
i
L
U
U
C
U
f
I
(II.15)
gdzie: I
p(n)
-skuteczna wartość składowej czynnej prądu źródła w n-tym okresie
U
d(0)
- początkowa wartość napięcia wyprostowanego (zadawania w układzie
regulacji napięcia DC)
U
d(n)
-
wartość napięcia wyprostowanego na końcu n-tego okresu
f
s
,U
s
-
częstotliwość (f
s
=1/T ) oraz wartość skuteczna napięcia źródła
i
F(n)
–
wartość prąd dławika na końcu n-tego okresu
Z (II.15) wynika, że istnieje jednoznaczny związek pomiędzy, mierzonymi na końcu okresu,
napięciem wyjściowym prostownika filtru aktywnego i prądem dławika a wartością skuteczną
składowej czynnej prądu źródła w n-tym okresie przebiegu napięcia zasilania.
Korzystając z tej zależności skonstruowano sterownik przedstawiony na rys. 1, w którym na
bazie informacji o wartościach uchybu napięcia wyprostowanego oraz prądu filtru
mierzonych i zapamiętywanych w ekstrapolatorze (EXT) na końcu każdego okresu przebiegu
napięcia sieci, zostaje wypracowany sygnał proporcjonalny do konduktancji zastępczej G
wszystkich odbiorników zasilanych ze źródła (i
p
=Gu
s
). Po wymnożeniu, okresowo stałej
wartości G przez sygnał proporcjonalny do napięcia sieci uzyskuje się referencyjny przebieg
prądu, od którego w następnej kolejności odejmuje się sygnał proporcjonalny przebiegu prądu
źródła. Otrzymana w ten sposób różnica:
)
(
)
(
)
(
Pr
t
i
t
i
t
i
s
ef
(II.16)
jest za pomocą regulatora histerezowego tłumaczona na odpowiednie sekwencje przełączeń
elementów półprzewodnikowych.
Po uwzględnieniu współczynników torów pomiarowych, na podstawie zależności II.15
i II.16 otrzymano funkcję celu układu sterowania przedstawionego na rys. 1 :
I
k
i
k
u
k
K
k
i
K
k
U
U
i
s
i
s
us
i
n
F
u
ud
n
d
d
i
]
)
[(
2
2
)
(
2
2
)
(
2
)
0
(
(II.17)
gdzie :
k
i
-
współczynnik wzmocnienia separatora prądu SI
k
us
, k
ud
-
współczynniki wzmocnienia separatorów napięciowych SUS i SUC
K
u,
K
i
-
współczynniki wzmocnienia układu regulacji.
Przyjmując błąd śledzenia prądu I bliski zera, z zależności (II.17) otrzymuje się :
s
us
i
i
n
F
n
d
o
i
u
ud
s
u
k
K
k
i
U
U
k
K
k
i
2
)
(
2
)
(
2
2
)
(
(II.18)
9
Aby warunek ten był spełniony, współczynniki przy mierzonych wielkościach
w zależnościach (II.18) i (II.15) powinny być jednakowe :
k u
k K
k
f C
U
K
Cf k
U k k
us s
ud
u
i
s
s
u
s i
s
ud us
2
2 2
2
2
(II.19a)
i
us
s
s
i
s
s
s
us
i
i
k
k
U
L
f
K
U
L
f
u
k
K
k
2
2
2
(II.19b)
Tak dobrane wartości wzmocnień gwarantują otrzymanie wyniku odpowiadającego
rzeczywistej wartości obciążenia w poprzednim (n-tym) okresie.
Dla parametrów modelu prostownika filtru aktywnego przyjętych na początku rozdziału
(k
i
=0,4, k
ud
=0,015, k
us
0,025) współczynniki te wynoszą odpowiednio :
3
2
2
2
3
10
32
,
40
025
,
0
015
,
0
230
2
4
,
0
50
10
2
,
1
u
K
6
2
10
33
,
425
4
,
0
025
,
0
230
2
009
.
0
50
i
K
Literatura :
[1] S.Piróg „Energoelektronika –Negatywne oddziaływanie.....” str.367
10
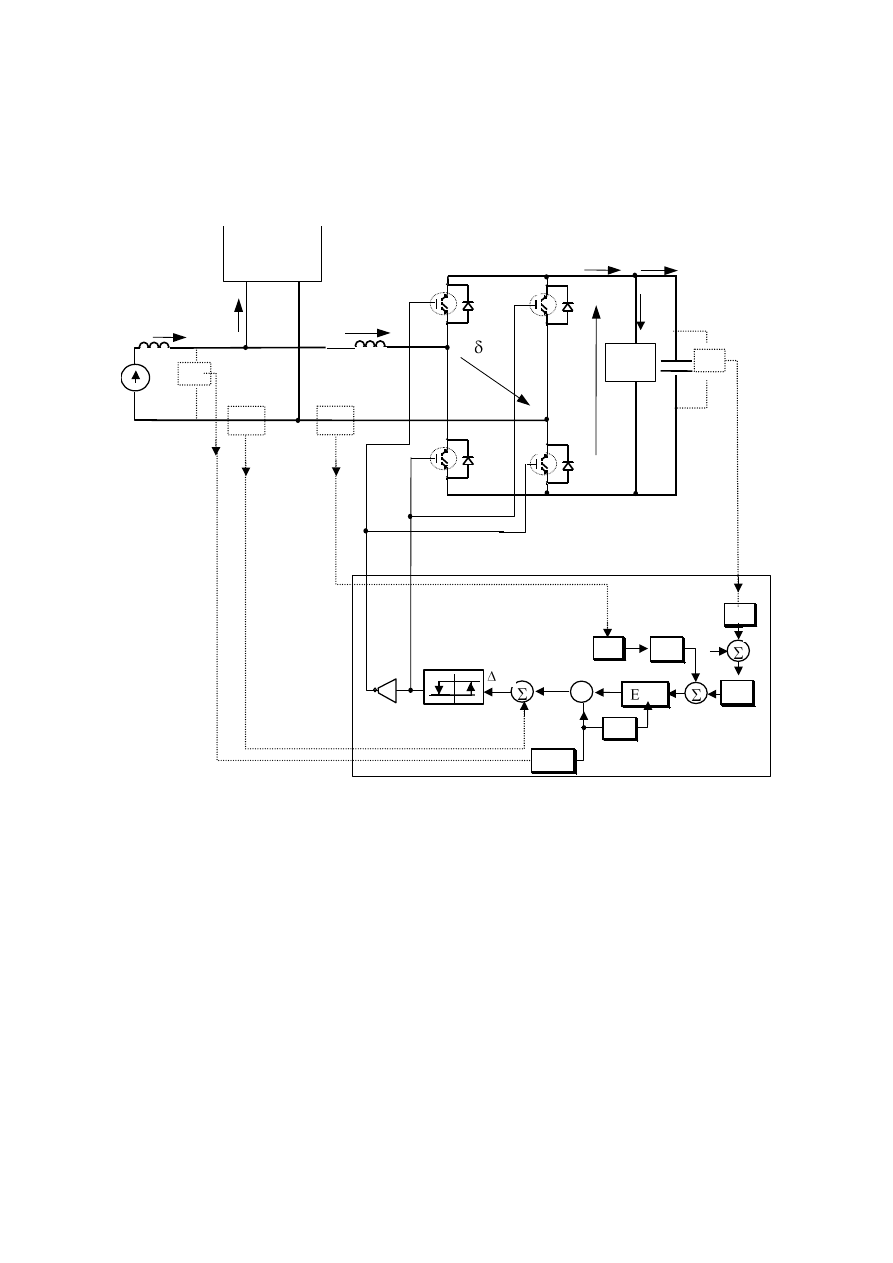
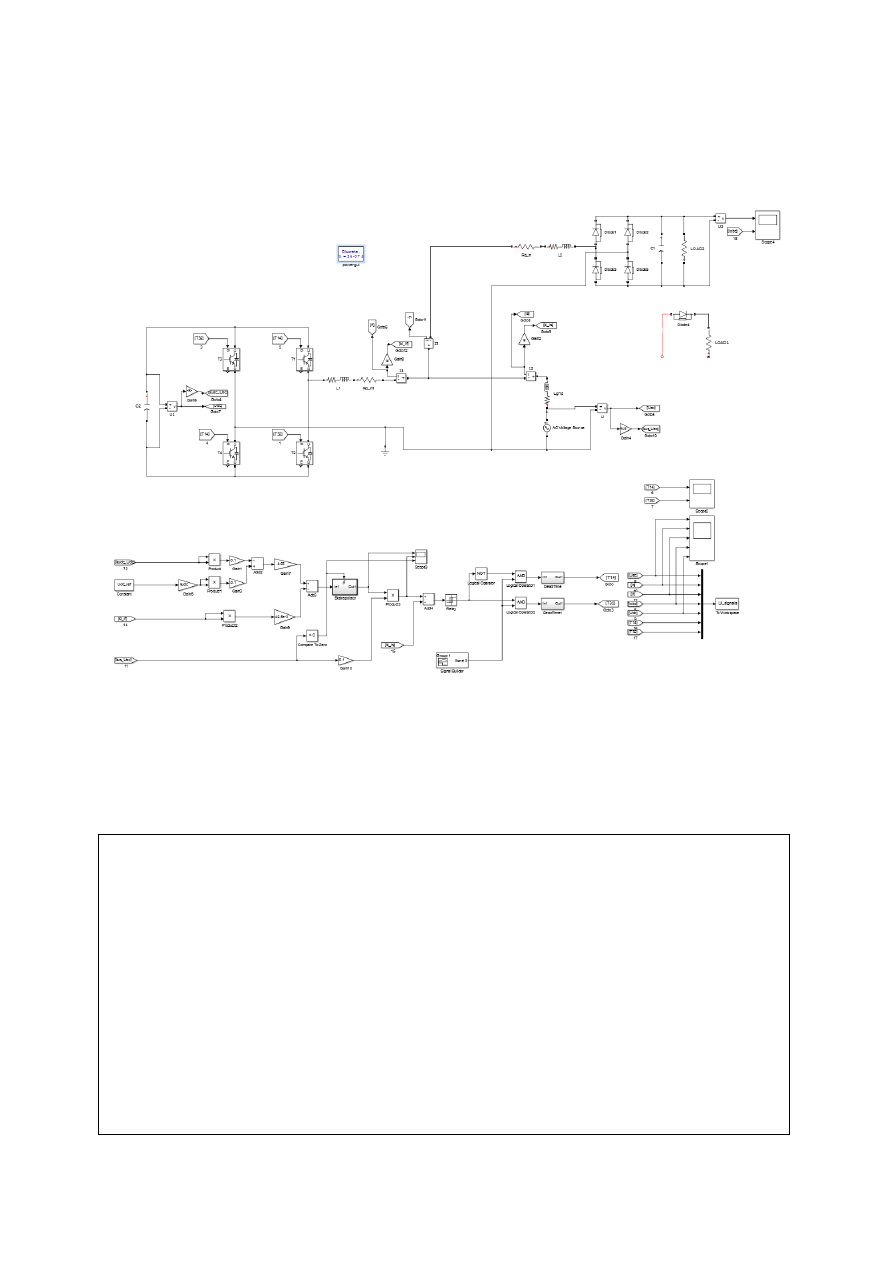
III BADANIA SYMULACYJNE – MODEL W MATLAB
SIMULINK
Rys 4 Schemat modelu prostownika- filtru aktywnego- MATLAB SIMULINK
PODSTAWOWE PARAMETRY UKŁADU:
%%Parametry systemu
Lf=9e-3;
% indukcyjnosć dławika invertera
R_Lf=100e-3;
%rezystancja dławika invertera
Deadtime=1e-6;
%czas martwy dla tranzystorów invertera
Udc_dbridge=240;
Rload=115;
% rezystor obciążenia nieliniowego
%Udc_dbridge=210;
%Rload=27.5;
% rezystor obciążenia nieliniowego
%% Układ sterowania
Udc_ref=650;
%napięcie Udc zadawane w układzie regulacji
ki=0.4;
% wzmocnienie toru pomiaru prądu
kus=0.025;
%
wzmocnienie toru pomiaru napięcia sieci
kudc=0.015;
%wzmocnieine toru pomiaru napięcia wyprostowanego
H=2*ki;
% strefa nieczułości regulatora histerezowego
11
IV WYTYCZNE DO SPRAWOZDANIA
W sprawozdaniu powinny być przedstawione następujące zagadnienia:
1
Opis teoretyczny:
- Filtracja aktywna : pojęcia podstawowe, definicja prądu biernego wg.
S.Fryzego.
- Zasada działania jednofazowego filtru aktywnego - opis
2
Badania symulacyjne
a) Przeprowadzić badania symulacyjne z obciążeniem nieliniowym w postaci
mostka diodowego (parametry jak na rysunku 2) dla 2 wartości rezystora w
obciążeniu po stronie DC: R=115 i R=27,5.
Wydrukować przebiegi prąd sieci, filtru, obciążenia; napięcie
kondensatora
Dokonać analizy przebiegu prądu sieci po kompensacji i prądu
obciążenia nieliniowego:
- wartość skuteczna,
- analiza FFT pod kątem zawartości harmonicznych niskich
rzędów (do 20),
- obliczyć współczynniki PF i DPF
b) Budowa modelu PFA z unipolarną modulacją napięcia
Na bazie modelu z modulacją bipolarną zbudować model z modulacją
unipolarną (w modulacji unipolarnej tranzystory T3 i T4 przetłaczane są z
częstotliwością sieciową sygnał z komparatora znaku, T1 i T2
odpowiadają za kształtowanie przebiegu prądu sygnał z układu regulacji)
Wykonać wszystkie analizy jak dla modelu z modulacją bipolarną
(pkt. a))
Dokonać porównania obydwóch rozwiązań pod kątem: przebiegu
napięcia wyjściowego falownika, skuteczności filtracji,
12
3. Analiza danych pomiarowych uzyskanych za pomocą rejestracji oscyloskopowej
a) Zamieścić zarejestrowane przebiegi w sprawozdaniu
b) Wykorzystując oprogramowanie Matlab Simulink, dokonać obróbki
przebiegów zarejestrowanych za pomocą oscyloskopu (dane w postaci
plików z rozszerzeniem csv trzeba zaimportować do przestzreni roboczej
MATLABA)
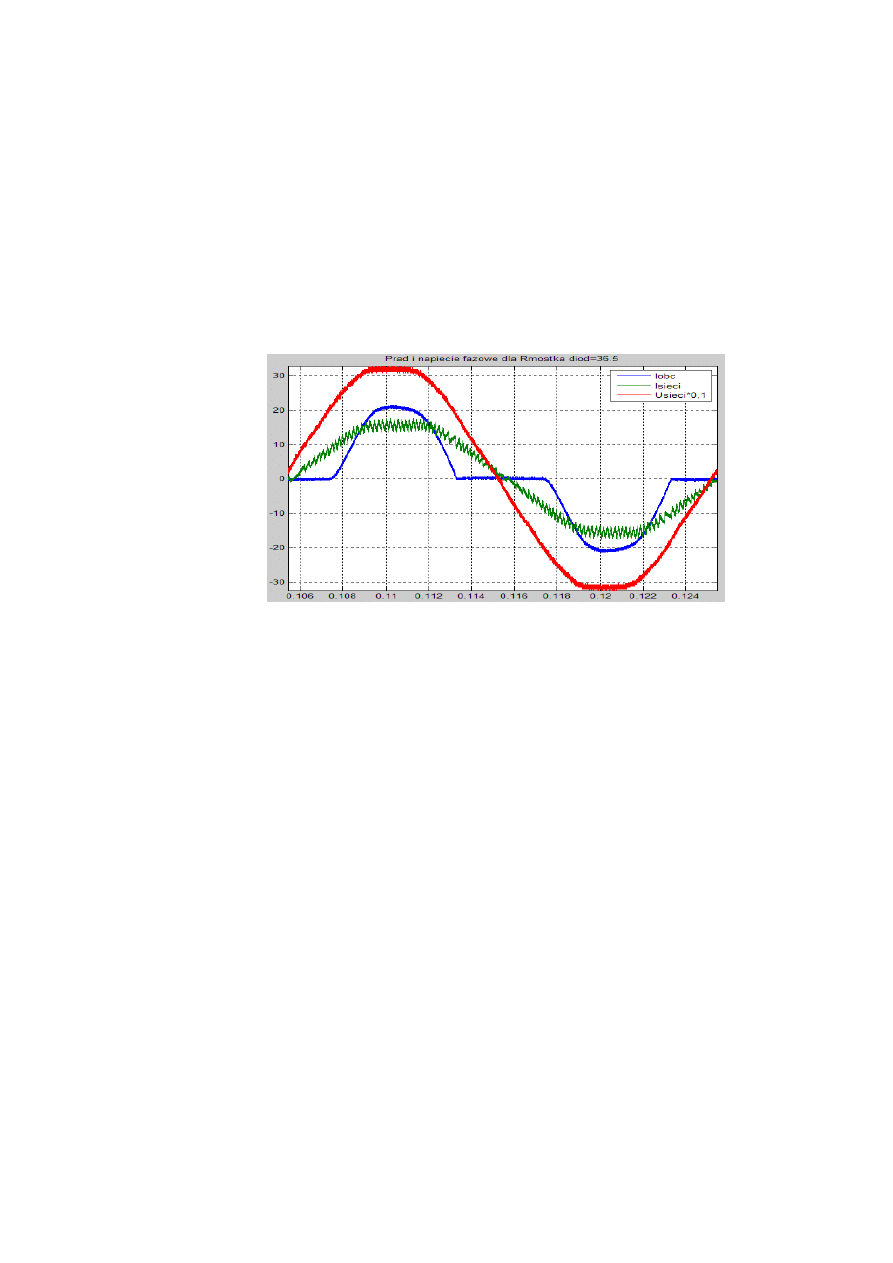
- wydrukować z pomocą funkcji plot przebiegi prądu i napięcia
Przykładowy rysunek z przebiegami uzyskanymi za pomocą oscyloskopu:
- przeprowadzić w Matlabie analizę FFT przebiegu napięcia i prądu pod
kątem zawartości harmonicznych niskich rzędów (do 15)
- przeprowadzić w Matlabie analizę FFT przebiegu prądu sieci pod kątem
zawartości składowych wysokich częstotliwości (do 15kHz)
c) Porównać wyniki praktyczne i symulacyjne (dla modelu z modulacją
unipolarną)
Na jednym rysunku zamieścić przebiegi uzyskane z symulacji i rzeczywiste
4. Podsumowanie i wnioski.
Obciążenie
Wyszukiwarka
Podobne podstrony:
Instrukcja do zad proj 13 Uklad sterowania schodow ruchom
MSIB Instrukcja do Cw Lab krystalizacja
Instrukcja do MHDD
Instrukcja do cwiczenia 1
Instrukcja do programu WSPR
Instrukcja do ćw 18 Montaż i demontaż magazynu składowania MPS
Instrukcja do VirtualPneumoLab2
Instrukcje do ćwiczeń 2013
Instrukcja do ćw 06 Sterowanie pracą silnika indukcyjnego za pomocą falownika
Ćw.1 Wybrane reakcje chemiczne przebiegające w roztworach wodnych ćwiczenie 1, Chemia ogólna i żywno
instrukcje do
Instrukcja do zad proj 10 Podstawowe funkcje logiczne z z
Biofizyka instrukcja do cw nr 23
Biofizyka instrukcja do cw nr 0 Nieznany (2)
INSTRUKCJA do ćwiczenia pomiar temperatury obrabiarek v3 ver robocza
instrukcja 06, sem 3, Podstawy elektrotechniki i elektroniki, Laboratoria, instrukcje do cwiczen 201
instrukcje do ćw mięso, mięso
Instrukcja do ćw 15 Montaż i uruchomienie układu nawrotnego silnika indukcyjnego
Instrukcja do cwiczenia 2
więcej podobnych podstron