
Automatyka i Robotyka
2011/12
Fizyka 1
Materiały do wykładu 2
14 10 2011
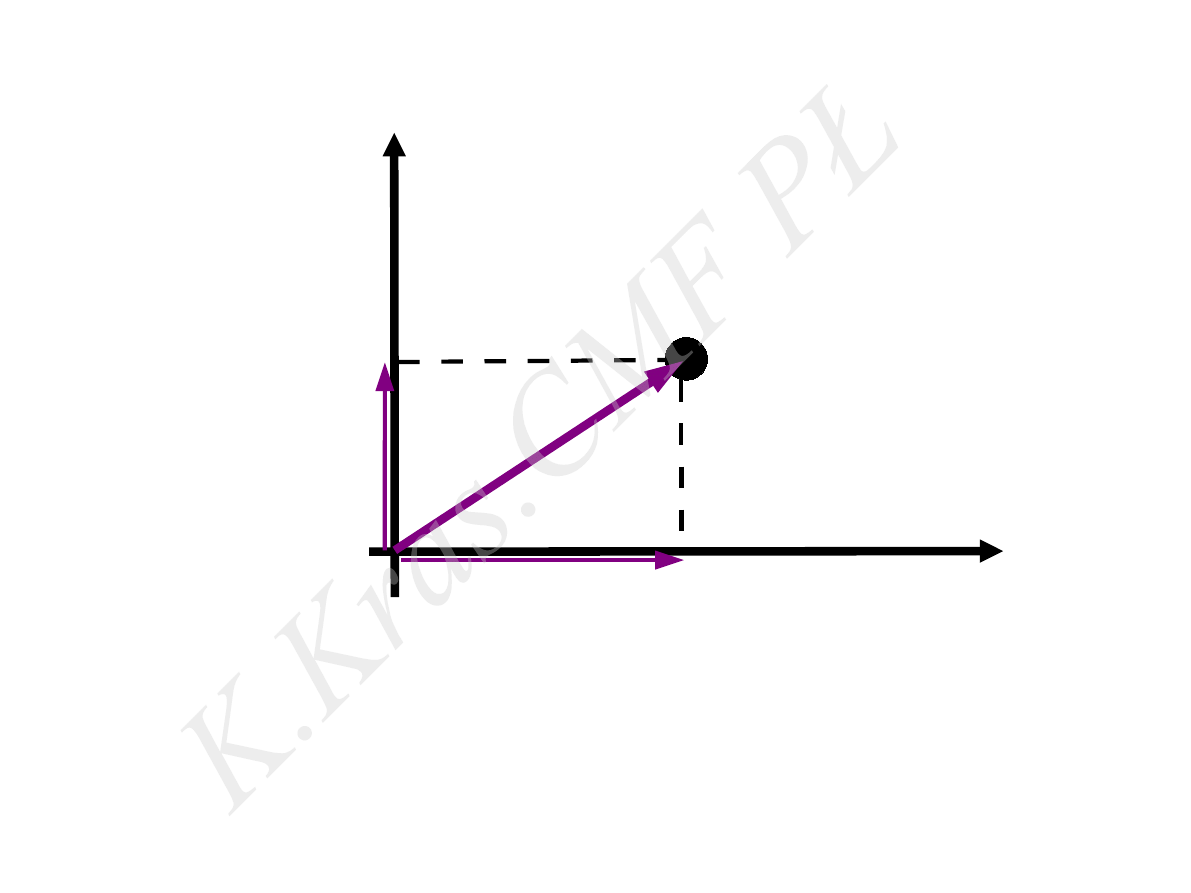
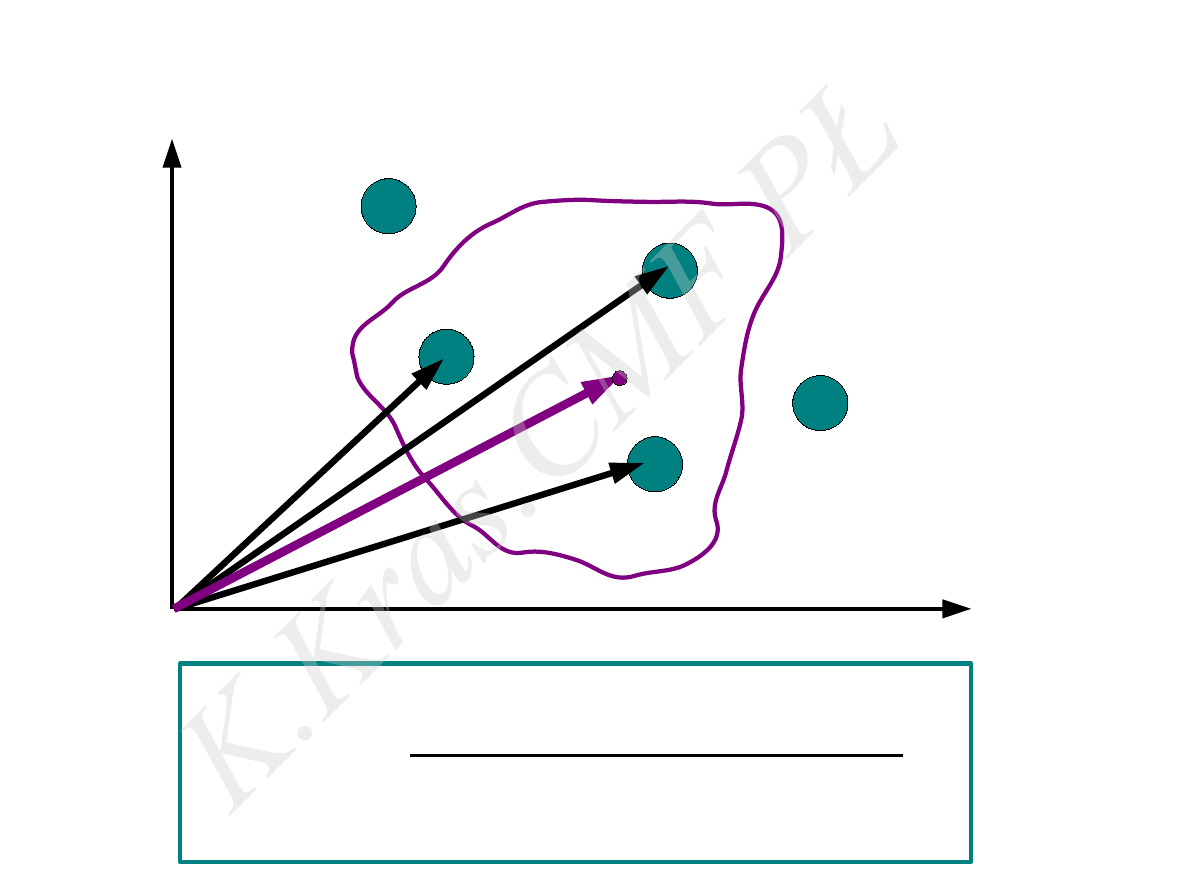
y
x
⃗r (t)
⃗
r
x
(
t )
⃗
r
y
(
t)
wektor położenia
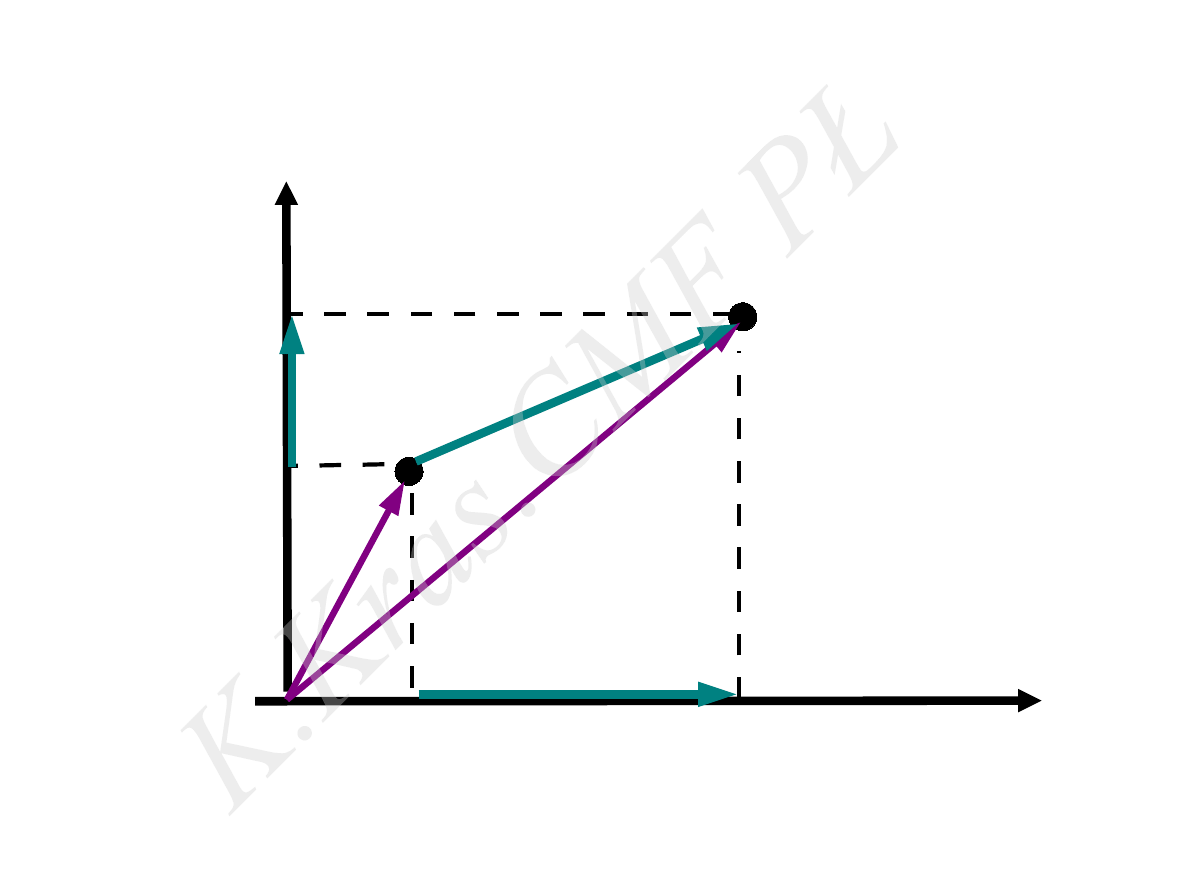
y
x
⃗
r
1
(
t)
⃗
r
2
(
t+Δ t)
⃗
Δ
r
⃗
Δ
r
x
⃗
Δ
r
y
wektor przemieszczenia
⃗
V =
d ⃗r
d t
=
d ⃗
r
x
dt
+
d ⃗
r
y
dt
+
d ⃗
r
z
dt
=
dx
dt
⃗i + dy
dt
⃗j + dz
dt
⃗k
⃗
V = ⃗
V
x
+ ⃗
V
y
+ ⃗
V
z
=
V
x
⃗i + V
y
⃗j + V
z
⃗k
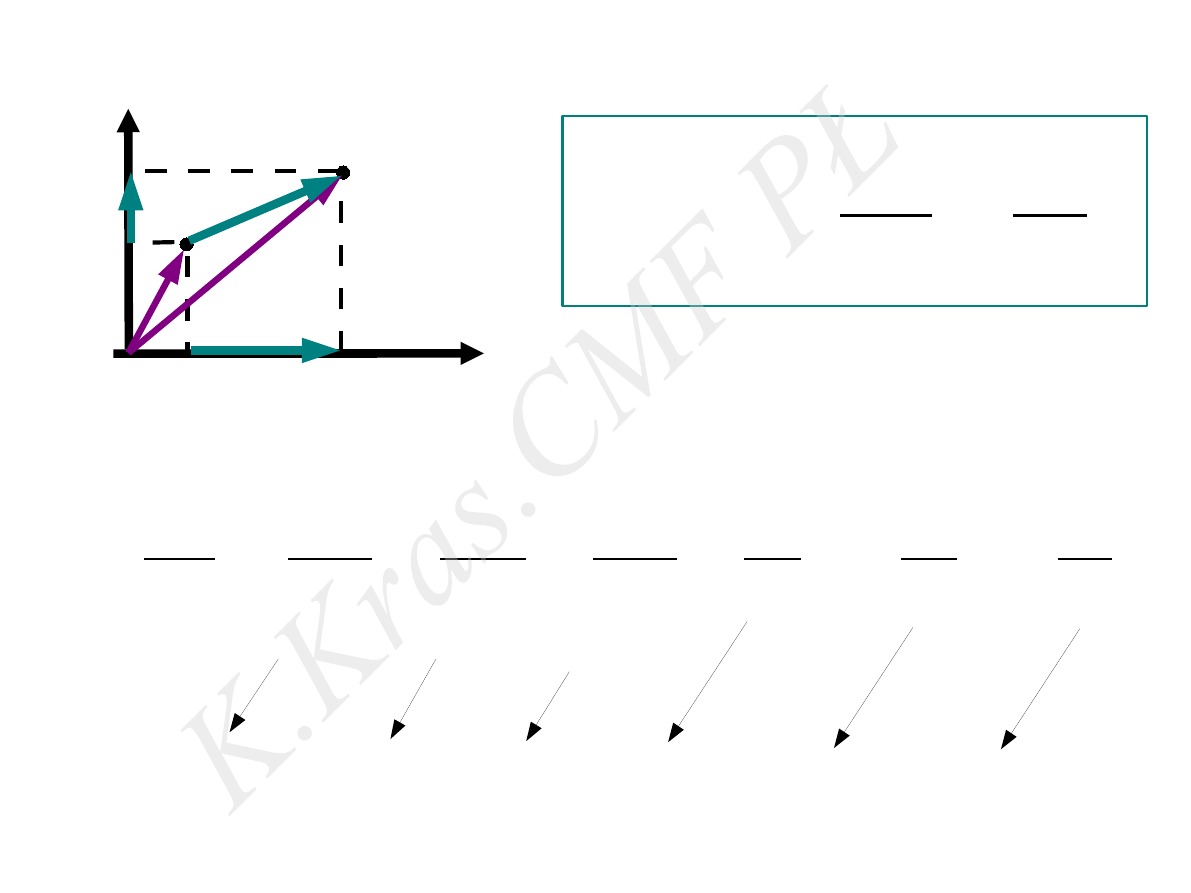
⃗
V = lim
Δ
t →0
Δ ⃗r
Δ
t
=
⃗
dr
d t
wektor prędkości
y
x
⃗
r
1
(
t)
⃗
r
2
(
t+Δ t)
⃗
Δ
r
⃗
Δ
r
x
⃗
Δ
r
y
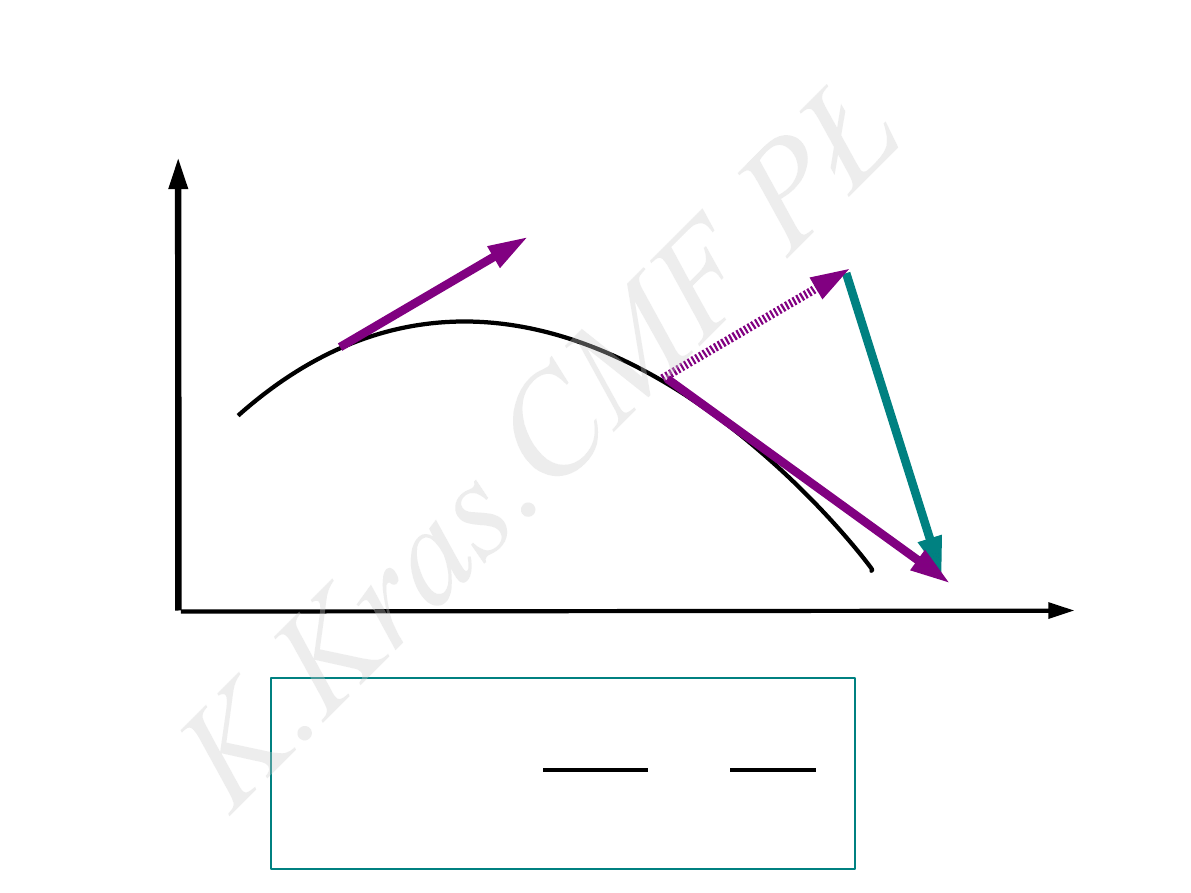
⃗
V (t )
⃗
V (t+Δ t)
Δ ⃗
V
⃗a = lim
Δ
t → 0
Δ ⃗
V
Δ
t
=
⃗
dV
d t
y
x
wektor przyspieszenia
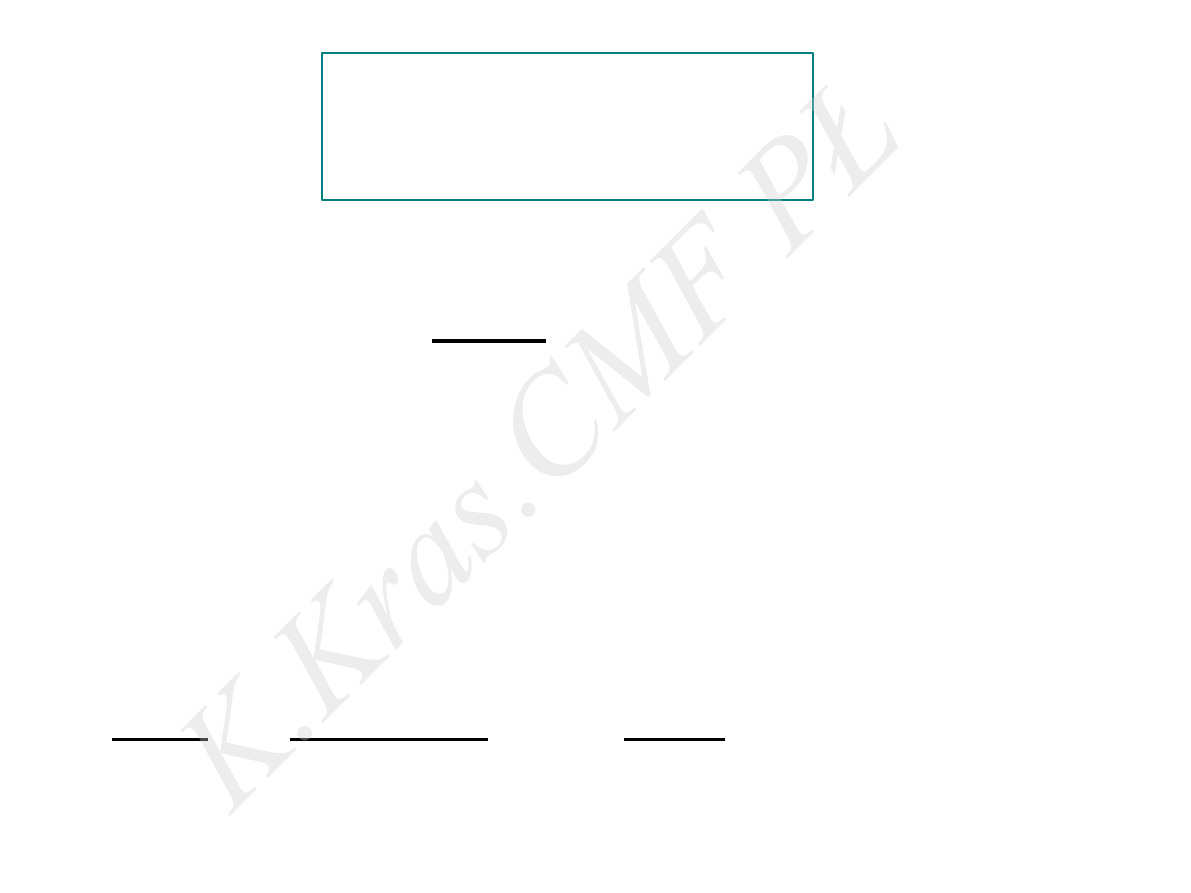
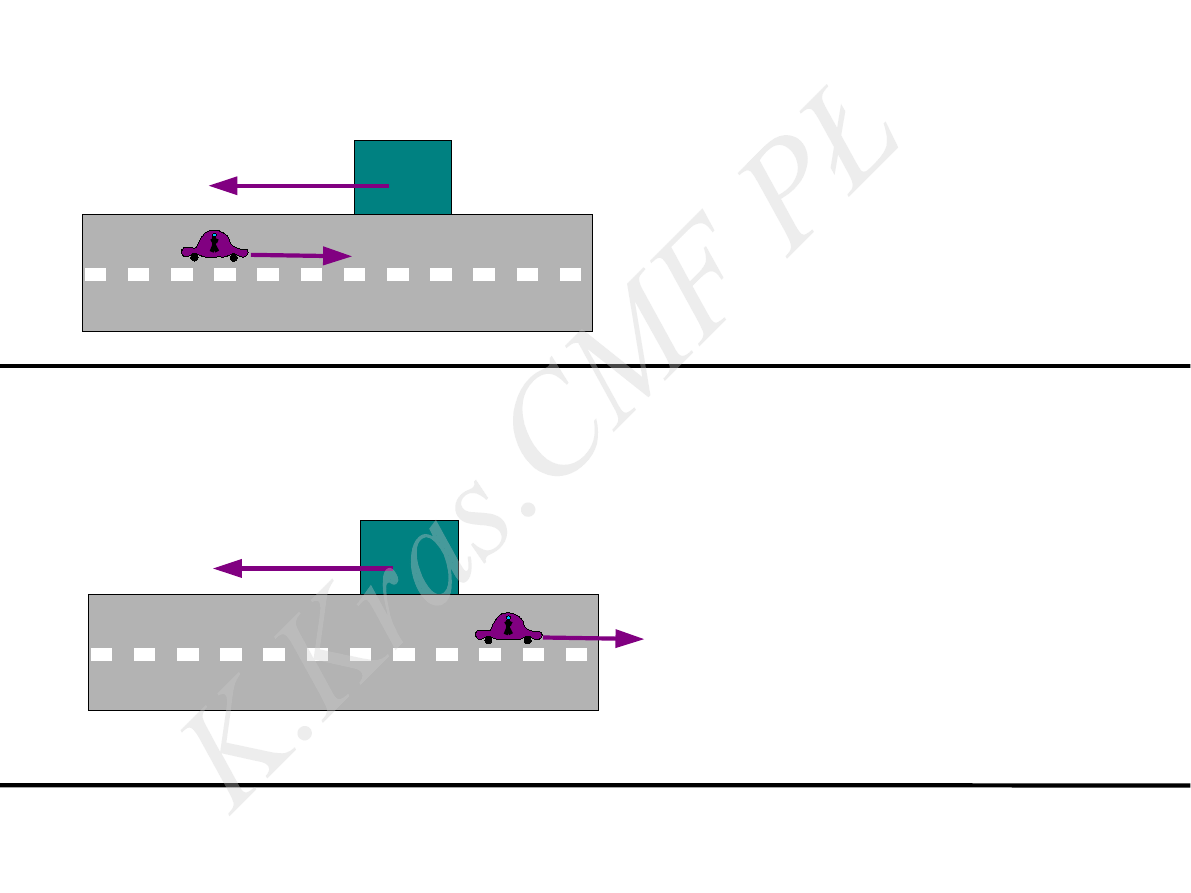
I zasada dynamiki
Ciało trwa w spoczynku
lub w ruchu jednostajnym prostoliniowym,
dopóki nie zadziała na niego siła, która
zmusi go do zmiany tego stanu

Układ odniesienia, względem którego
ciało
swobodne
spoczywa lub porusza się ruchem
jednostajnym prostoliniowym
to
układ inercjalny
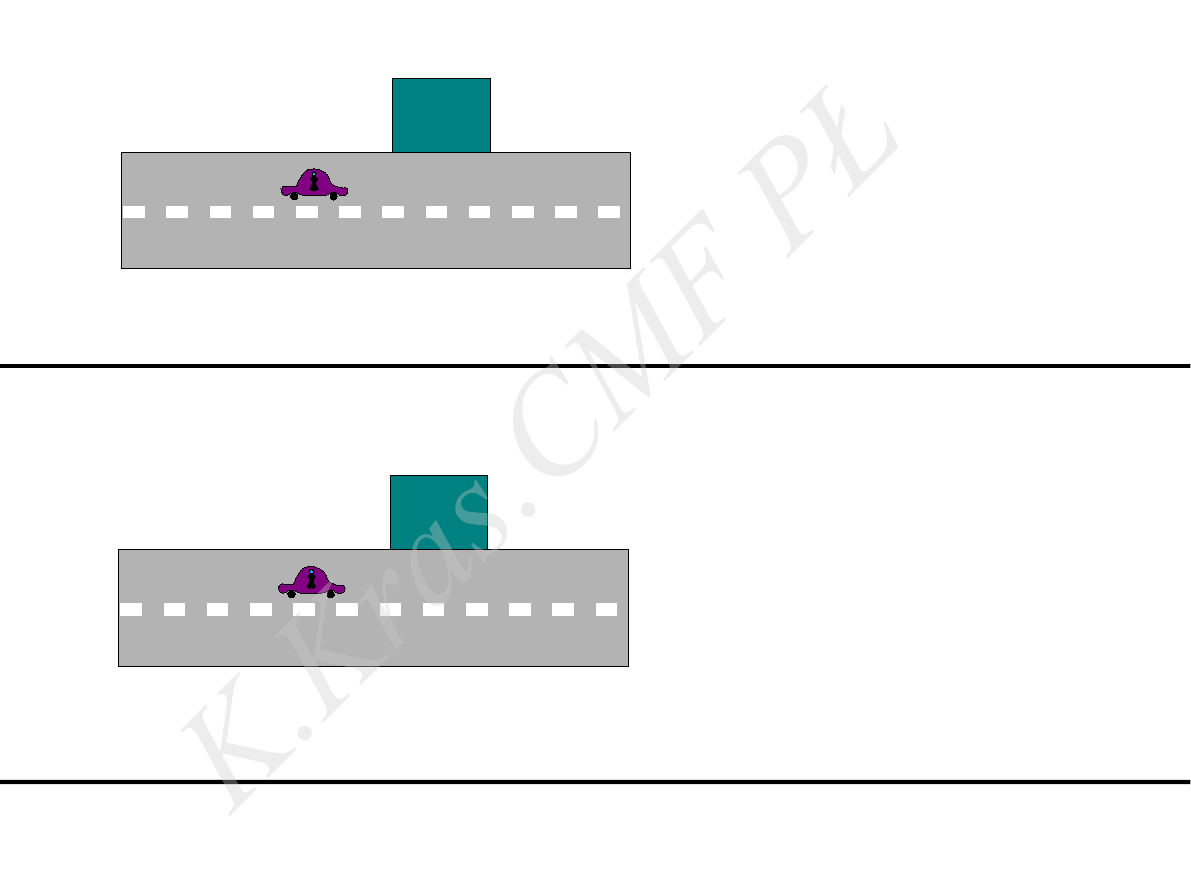
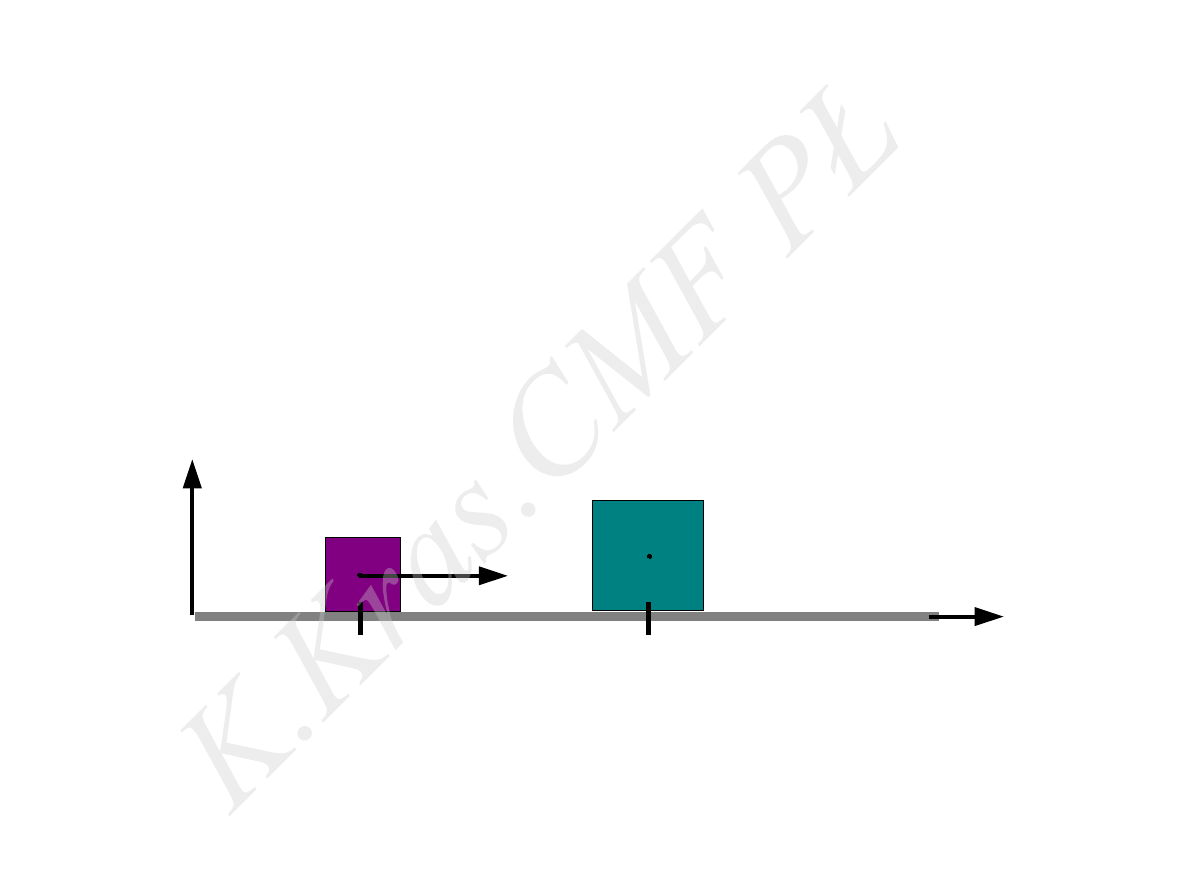
obiekt obserwowany –
dom
układ odniesienia -
samochód
siły( poziome), działające na dom –
brak
t =t
1
t =t
2
>
t
1
układ inercjalny
⃗
V =0
⃗
V =0
wynik obserwacji:
obiekt spoczywa
I zasada dynamiki
- spełniona
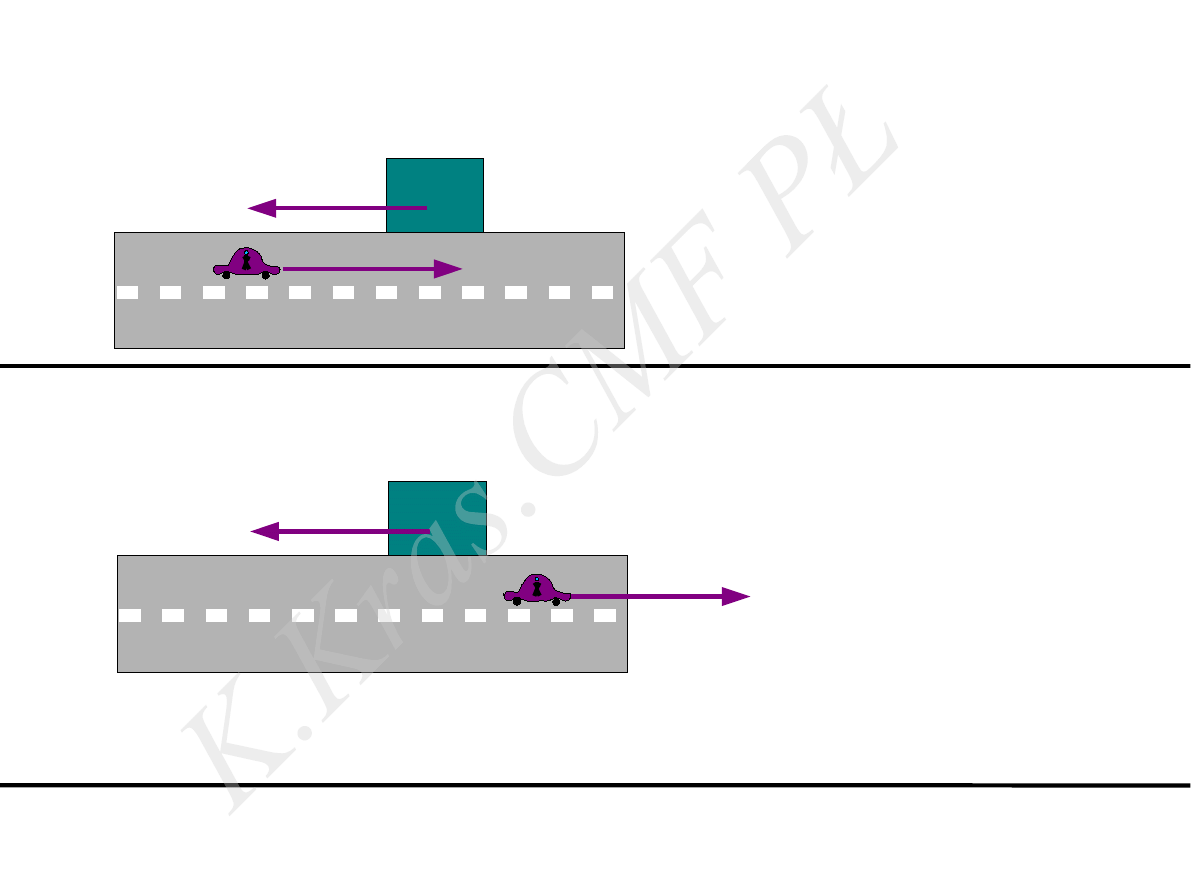
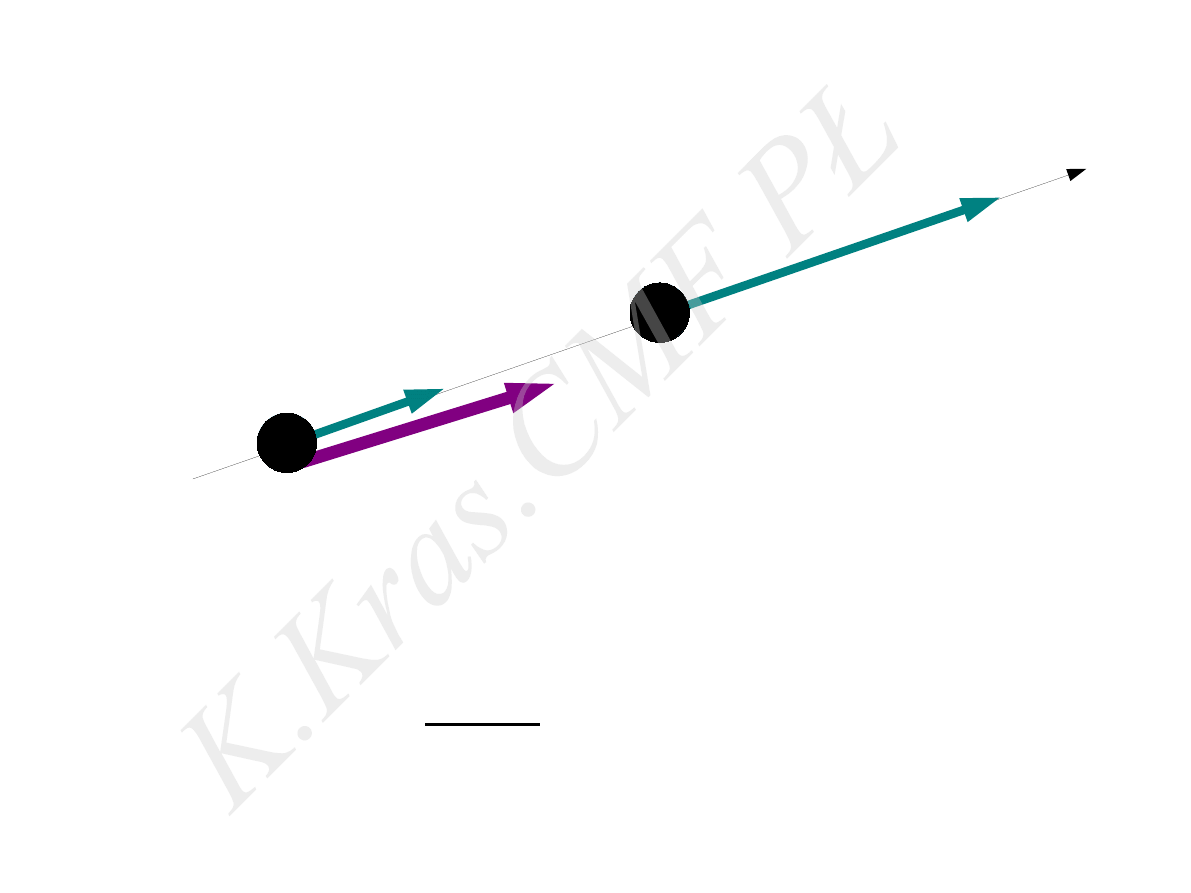
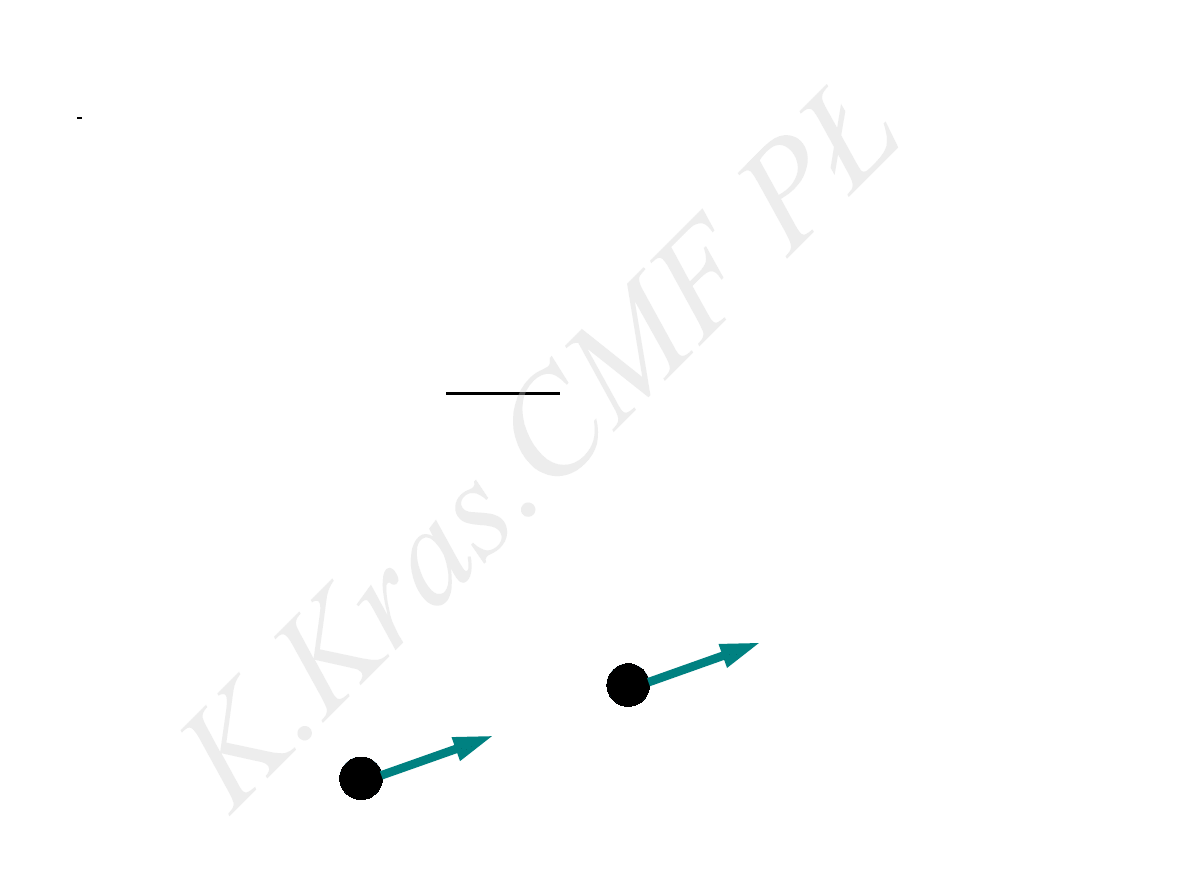
stała prędkość
układ inercjalny
t =t
1
t =t
2
>
t
1
⃗
V ≠0
⃗
V ≠0
obiekt obserwowany –
dom
układ odniesienia -
samochód
siły( poziome), działające na dom –
brak
wynik obserwacji:
obiekt porusza się ruchem
jednostajnym prostoliniowym
I zasada dynamiki
- spełniona
stała prędkość
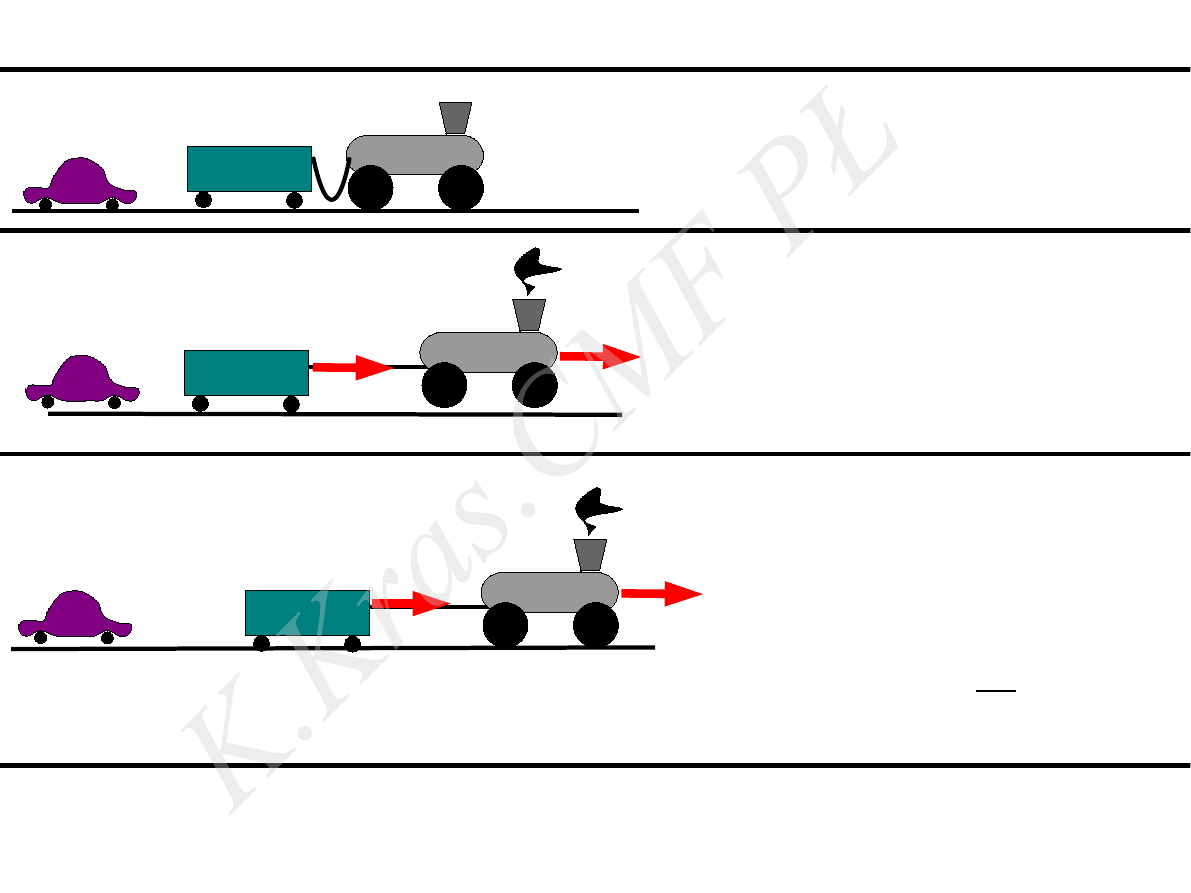
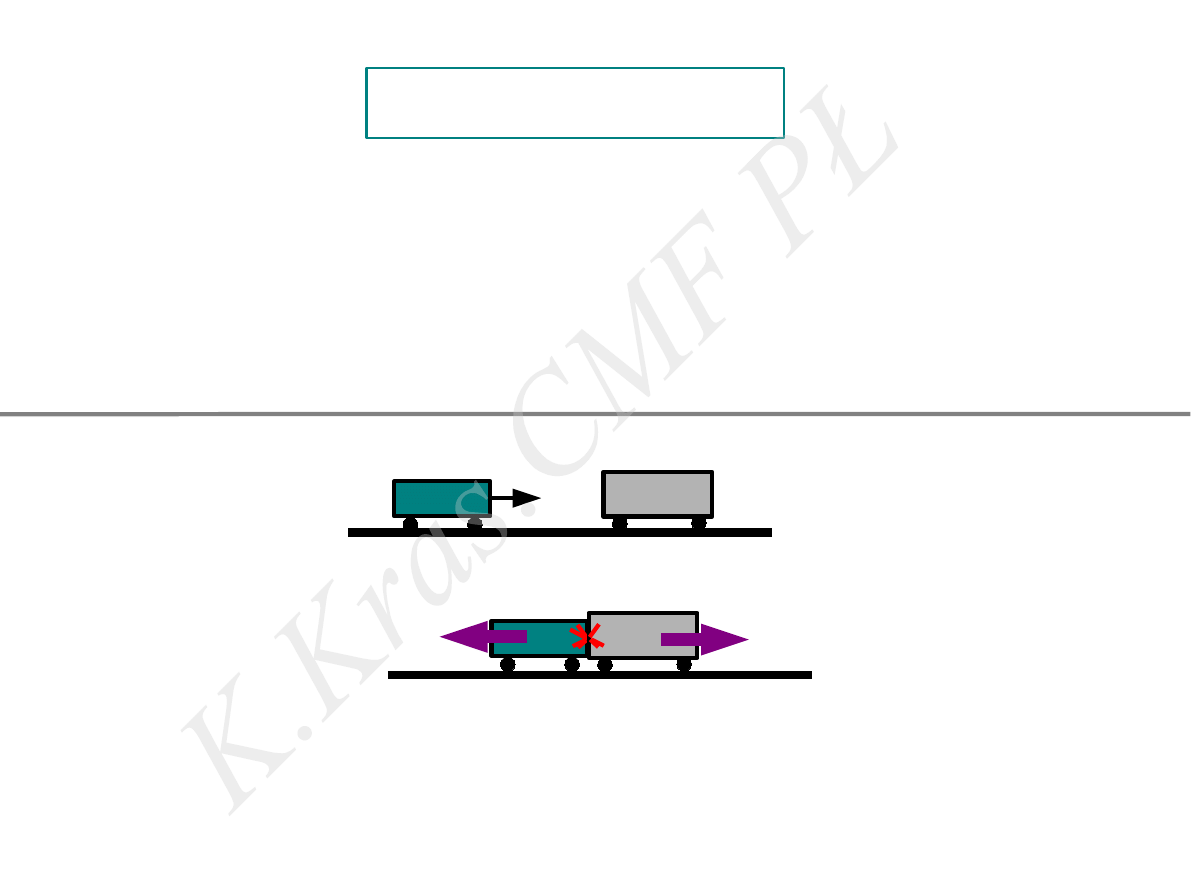
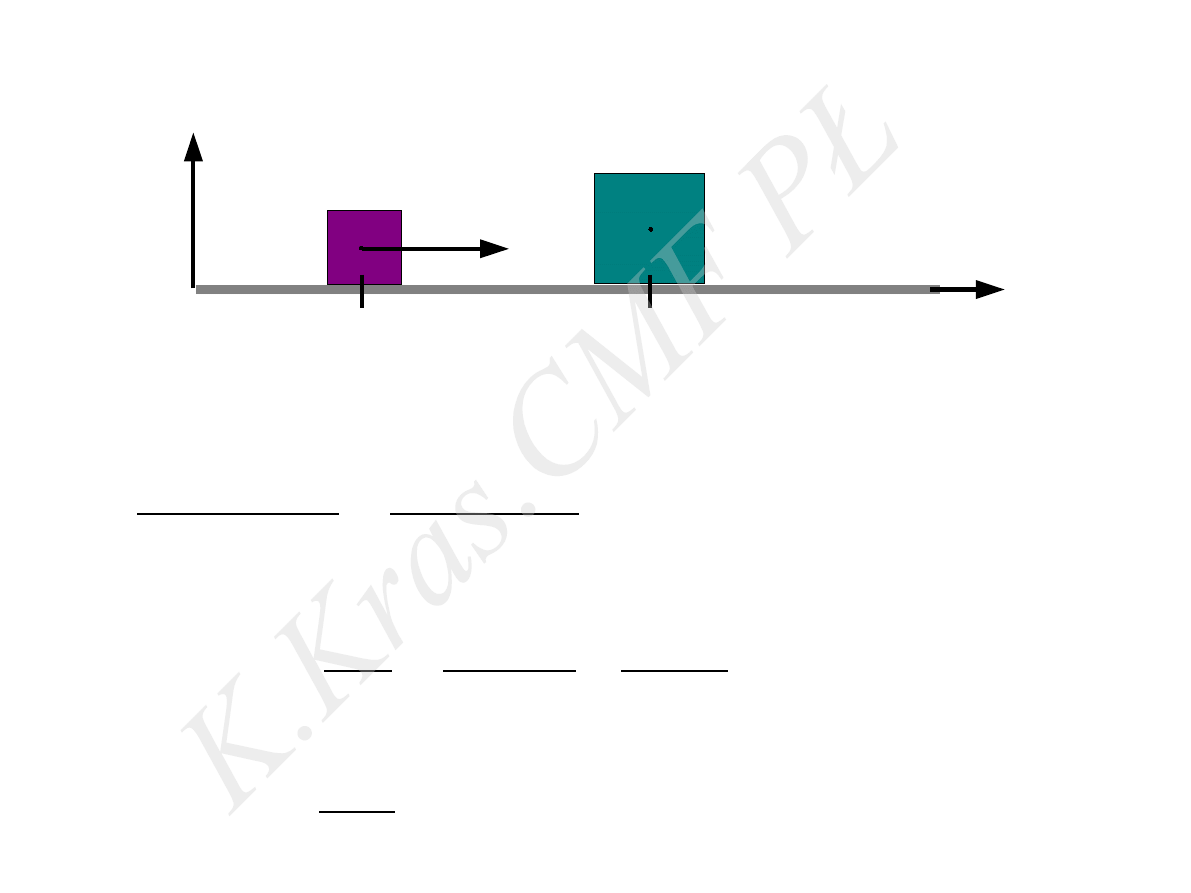
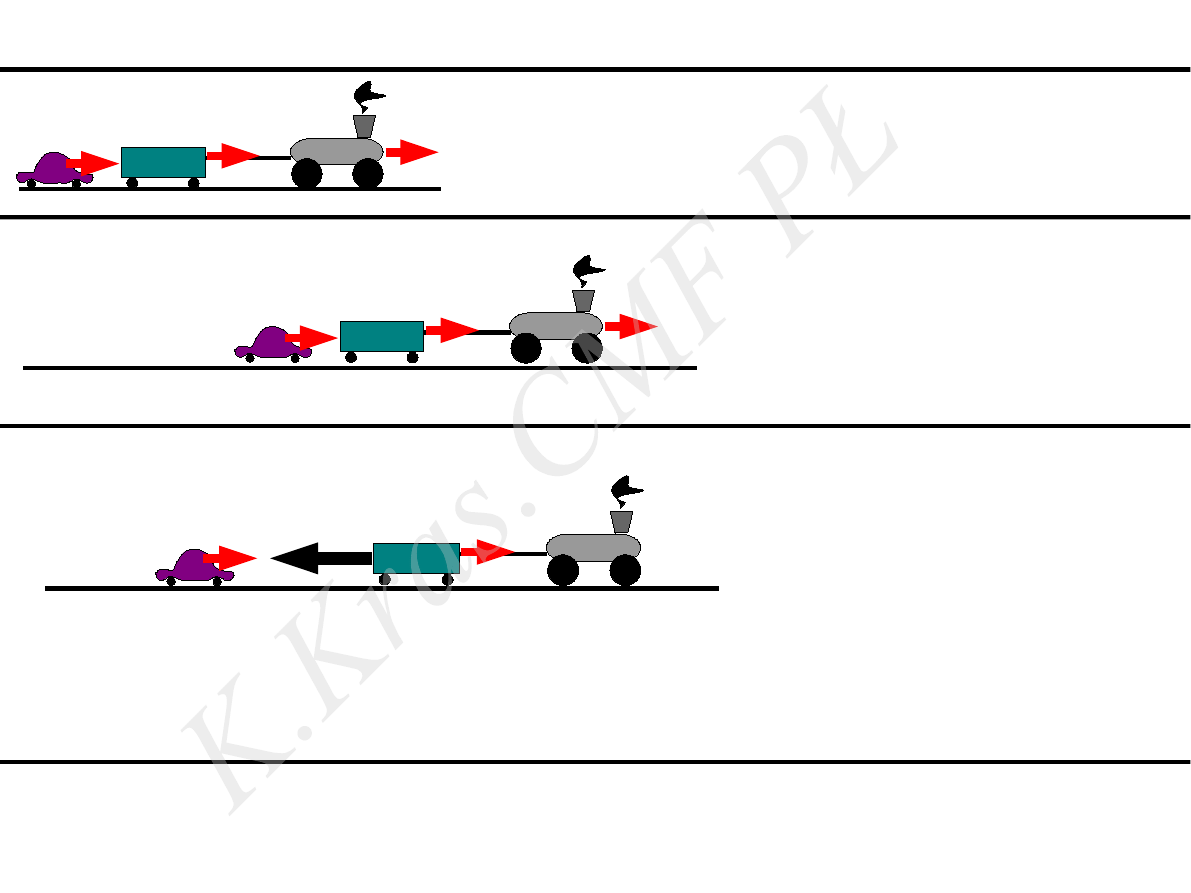
m
układ odniesienia -
samochód
, obiekt obserwowany -
wagon
⃗b =
⃗
F
m
przyspieszenie wagonu
względem
samochodu
⃗
F ≠0
m
⃗b
⃗
F ≠0
m
⃗a
⃗b
siła( pozioma), działająca na wagon –
działa
wynik obserwacji:
obiekt porusza się
z przyspieszeniem
układ inercjalny
II zasada dynamiki
-
spełniona
II zasada dynamiki
d ⃗p
d t
= ⃗
F
dla m = const.
d ⃗p
d t
=
d (m ⃗
V )
d t
=
m
d ⃗
V
d t
=
m⃗a = ⃗F
⃗
F ≠0 ⇒
d ⃗p
dt
≠
0 ⇒ ⃗p≠const
⃗p
⃗p
⃗
F
II zasada dynamiki
⃗
F =0 ⇒
d ⃗p
dt
=
0 ⇒ ⃗p=const
zasada zachowania pędu
⃗p
⃗p
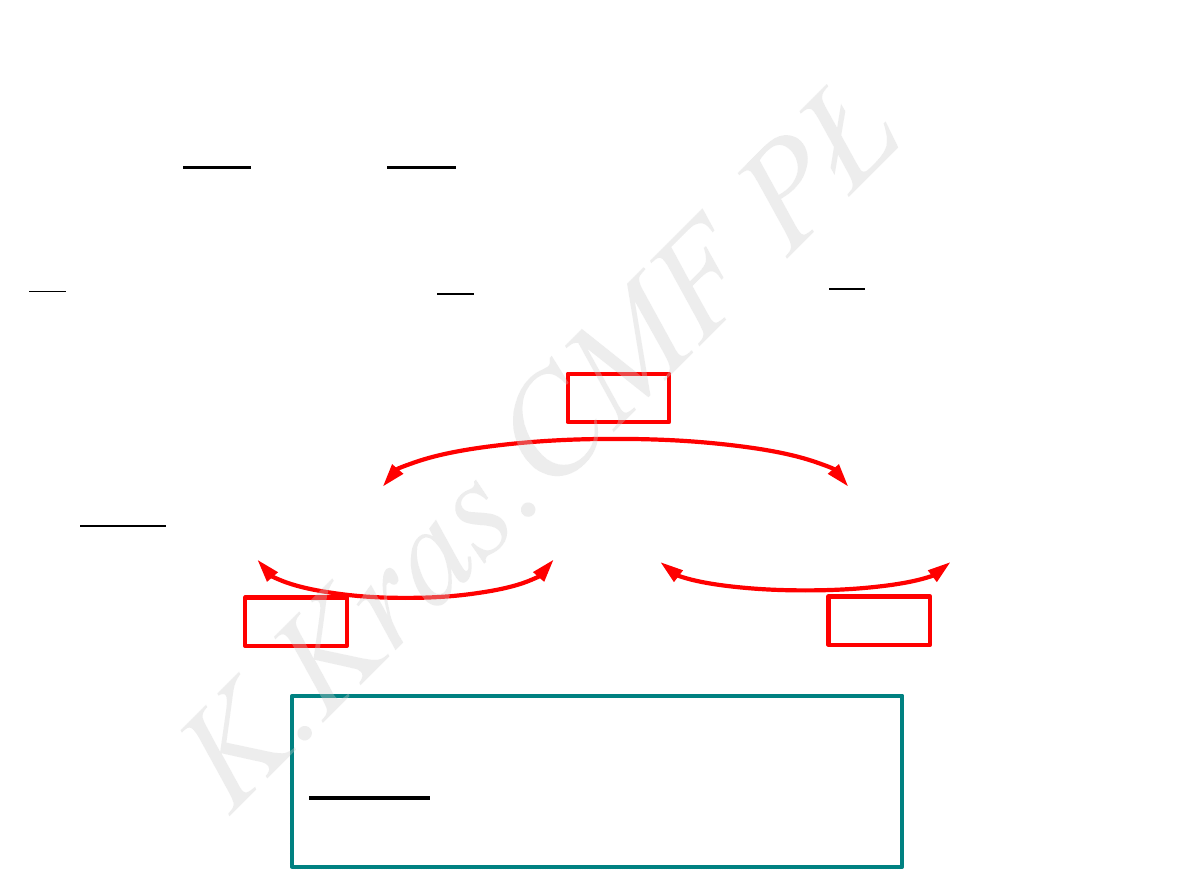
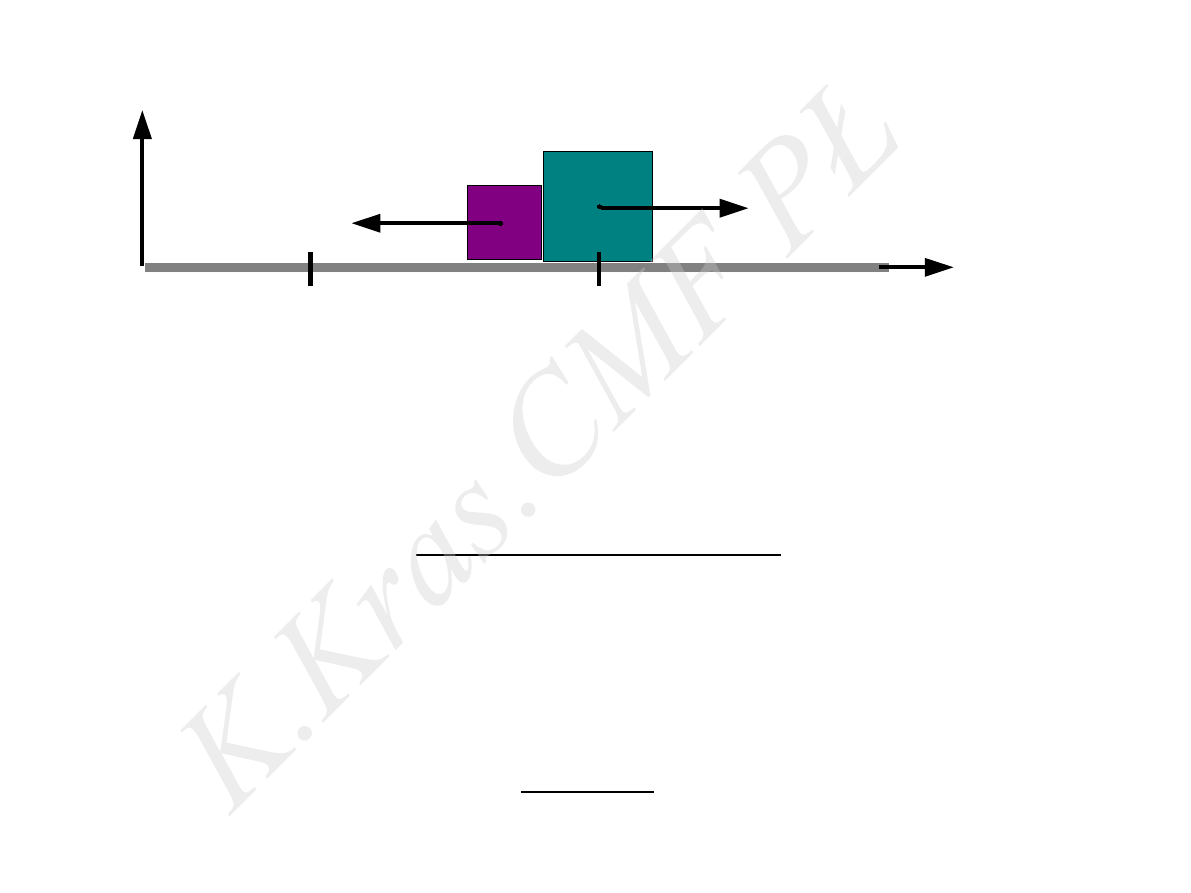
III zasada dynamiki
⃗
F
i j
= − ⃗
F
j i
V
⃗
F
21
⃗
F
12
1
2
1
2
1
⃗
F
21
= − ⃗
F
12
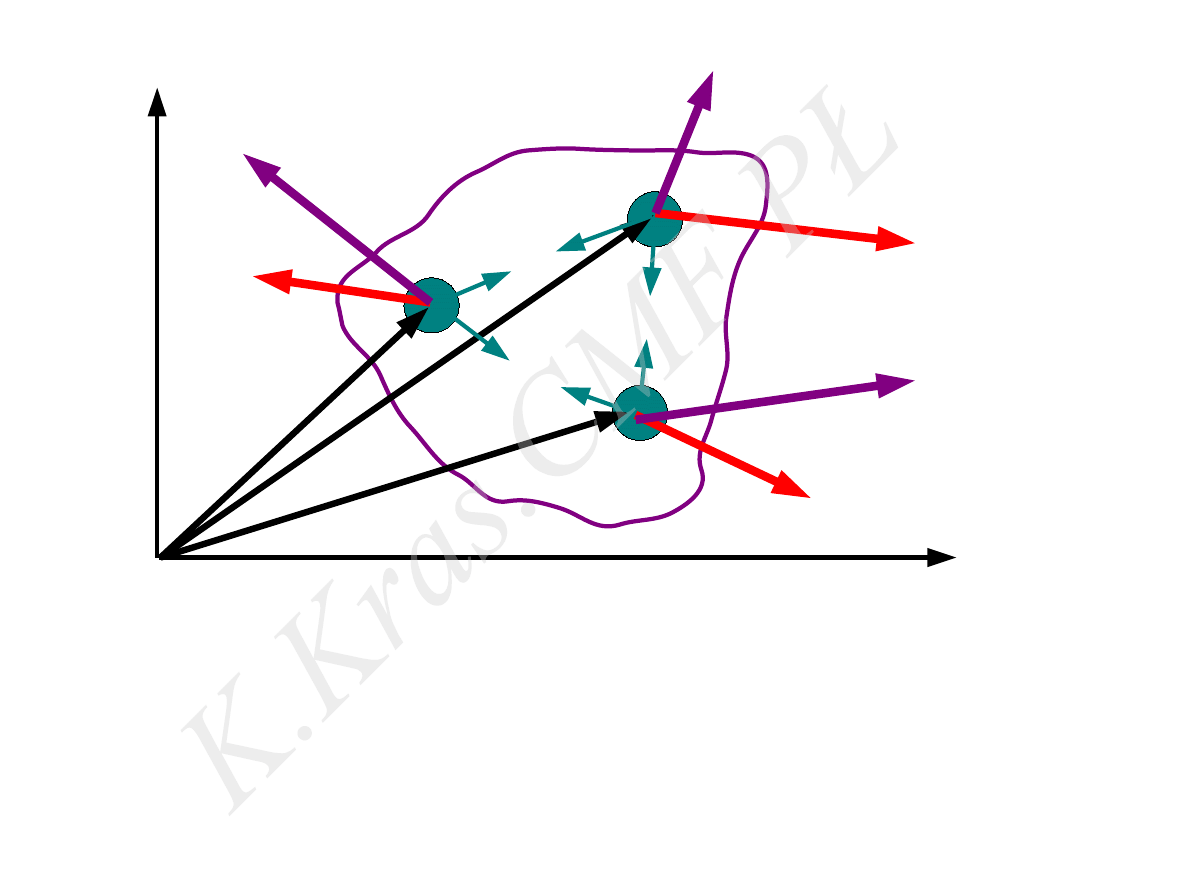
x
y
⃗
r
1
⃗
r
2
⃗
r
3
m
1
m
2
m
3
środek masy układu punktów materialnych
⃗
R
środek
masy
⃗
R =
m
1
⃗
r
1
+
m
2
⃗
r
2
+
m
3
⃗
r
3
m
1
+
m
2
+
m
3

d
d t
⃗
R =
d
d t
(
m
1
⃗
r
1
+
m
2
⃗
r
2
+
m
3
⃗
r
3
m
1
+
m
2
+
m
3
)
⃗
V
u
=
m
1
⃗
V
1
+
m
2
⃗
V
2
+
m
3
⃗
V
3
m
1
+
m
2
+
m
3
M
u
=
m
1
+
m
2
+
m
3
ruch środka masy układu
prędkość środka masy układu
masa układu

⃗
P
u
=
M
u
⃗
V
u
=
m
1
⃗
V
1
+
m
2
⃗
V
2
+
m
3
⃗
V
3
pęd środka masy układu ciał
x
y
m
1
m
2
m
3
⃗
F
21
⃗
F
12
⃗
F
31
⃗
F
23
⃗
F
13
⃗
F
32
⃗
F
z1
⃗
F
z2
⃗
F
z3
⃗
p
3
⃗
p
2
⃗
p
1
⃗
F
12
, ⃗
F
13
, ⃗
F
21
, ⃗
F
23
, ⃗
F
31
, ⃗
F
32
siły wewnętrzne układu
⃗
P
u
= ⃗
p
1
+ ⃗
p
2
+ ⃗
p
3
⃗
F
z1
, ⃗
F
z2
, ⃗
F
z3
siły zewnętrzne
pęd układu
ruch środka masy układu ciał
d
d t
⃗
P
u
=
d
d t
(
m
1
⃗
V
1
+
m
2
⃗
V
2
+
m
3
⃗
V
3
)
d
d t
(
m
1
⃗
V
1
)
= ⃗
F
21
+ ⃗
F
31
+ ⃗
F
z1
d
d t
(
m
2
⃗
V
2
)
= ⃗
F
12
+ ⃗
F
32
+ ⃗
F
z2
d
d t
(
m
3
⃗
V
3
)
= ⃗
F
13
+ ⃗
F
23
+ ⃗
F
z3
d ⃗
P
u
d t
= ⃗
F
21
+ ⃗
F
31
+ ⃗
F
z1
+ ⃗
F
12
+ ⃗
F
32
+ ⃗
F
z2
+ ⃗
F
13
+ ⃗
F
23
+ ⃗
F
z3
Σ=
0
d ⃗
P
u
d t
= ⃗
F
z1
+ ⃗
F
z2
+ ⃗
F
z3
Σ=
0
Σ=
0

zasada zachowania pędu układu ciał
układ odosobniony
∑
i=1
i=n
⃗
F
zi
=
0 ⇒
d ⃗
P
u
d t
=
0 ⇒ ⃗
P
u
=
const
x
y
m
M
⃗
V
0
0
l
Przykład 1.
x
y
m
M
⃗
V
0
0
l
Przed zderzeniem.
x
m
=
V
0
t
x
M
=
l
x
u
=
m x
m
+
M x
M
m+M
=
m V
0
t+M l
m+M
V
u
=
d x
u
dt
=
m V
0
+
0
m+M
=
m V
0
m+M
prędkość środka masy
układu przed zderzeniem
a
u
=
d V
u
dt
=
0
przyspieszenie środka masy
układu przed zderzeniem
x
y
m
M
⃗
F
0
l
Zderzenie
⃗
F
τ−
czas zderzenia
m V
0
+Δ
p
m
=
m V
k
m V
0
−
F τ = m V
k
M 0+Δ p
M
=
M V
k
M 0+F τ = M V
k
m V
0
=
M 0 = m V
k
+
M V
k
= (
m+M )V
k
V
k
=
mV
0
(
m+M )
prędkość ciał po zderzeniu
x
y
m
M
⃗
V
k
0
l
Po zderzeniu
x
m+M
=
l+V
k
t
V
u
=
d ( x
m+ M
)
dt
=
V
k
=
mV
0
m+M
prędkość środka masy
układu po zderzeniu
a
u
=
d V
u
dt
=
0
przyspieszenie środka masy
układu po zderzeniu
y
h
0
y
h
0
V
1
V
2
Przykład 2
.
m
1
m
2
m
1
+
m
2
y
h
0
V
1
V
2
m
1
m
2
y
1
=
h+V
1
t−
g t
2
2
y
2
=
h−V
2
t−
g t
2
2
y
u
=
m
1
y
1
+
m
2
y
2
m
1
+
m
2
=
h+
(
m
1
V
1
−
m
2
V
2
)
t
m
1
+
m
2
−
g t
2
2
V
u
=
d y
u
dt
=
m
1
V
1
−
m
2
V
2
m
1
+
m
2
−
g t
a
u
=
d V
u
dt
= −
g
prędkość środka masy układu
przyspieszenie środka masy układu
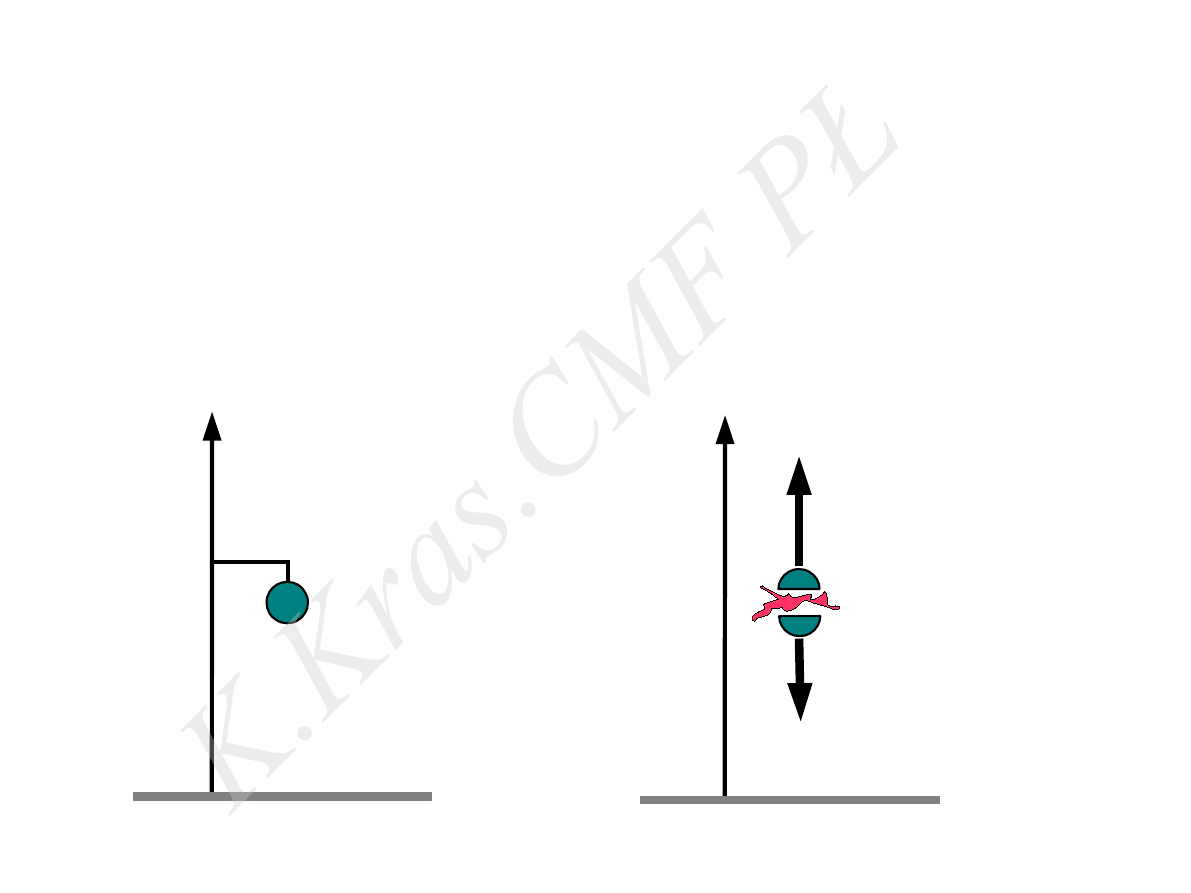
⃗g
M
m
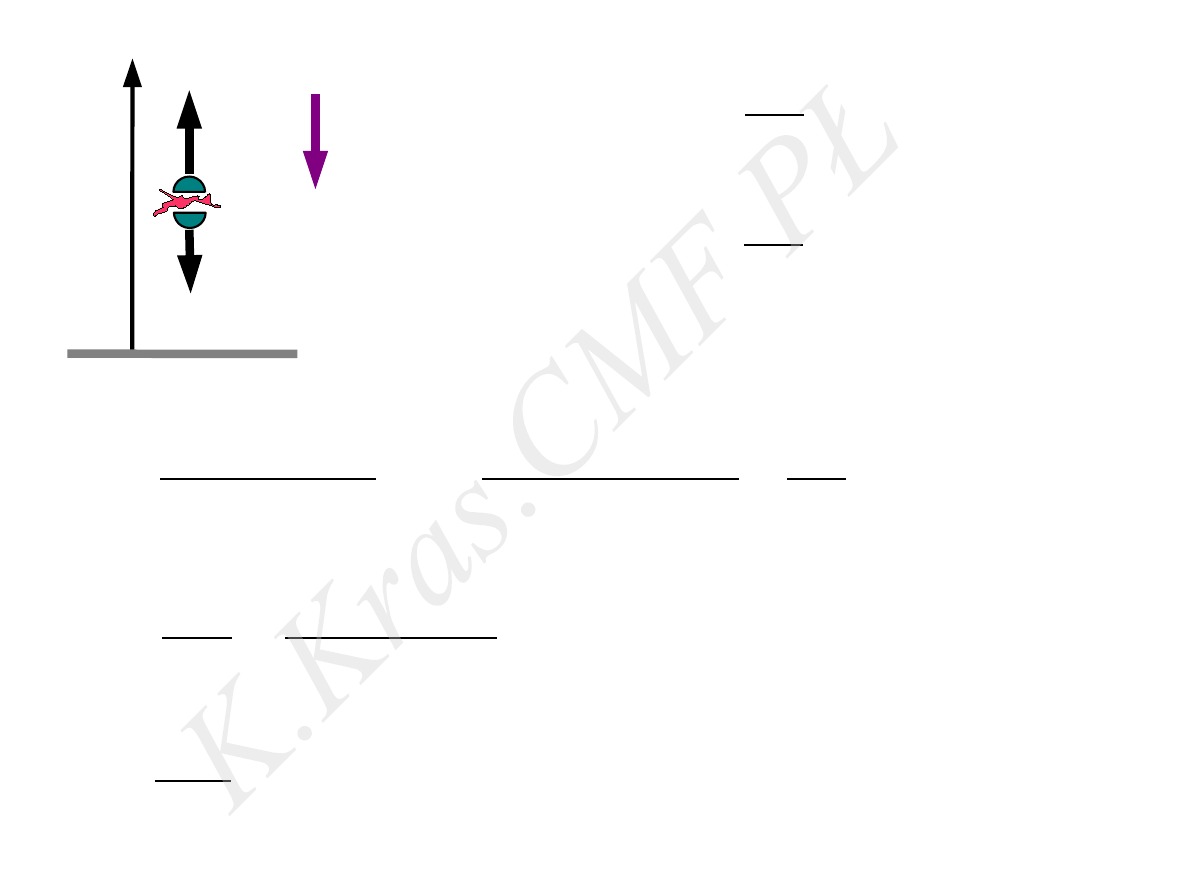
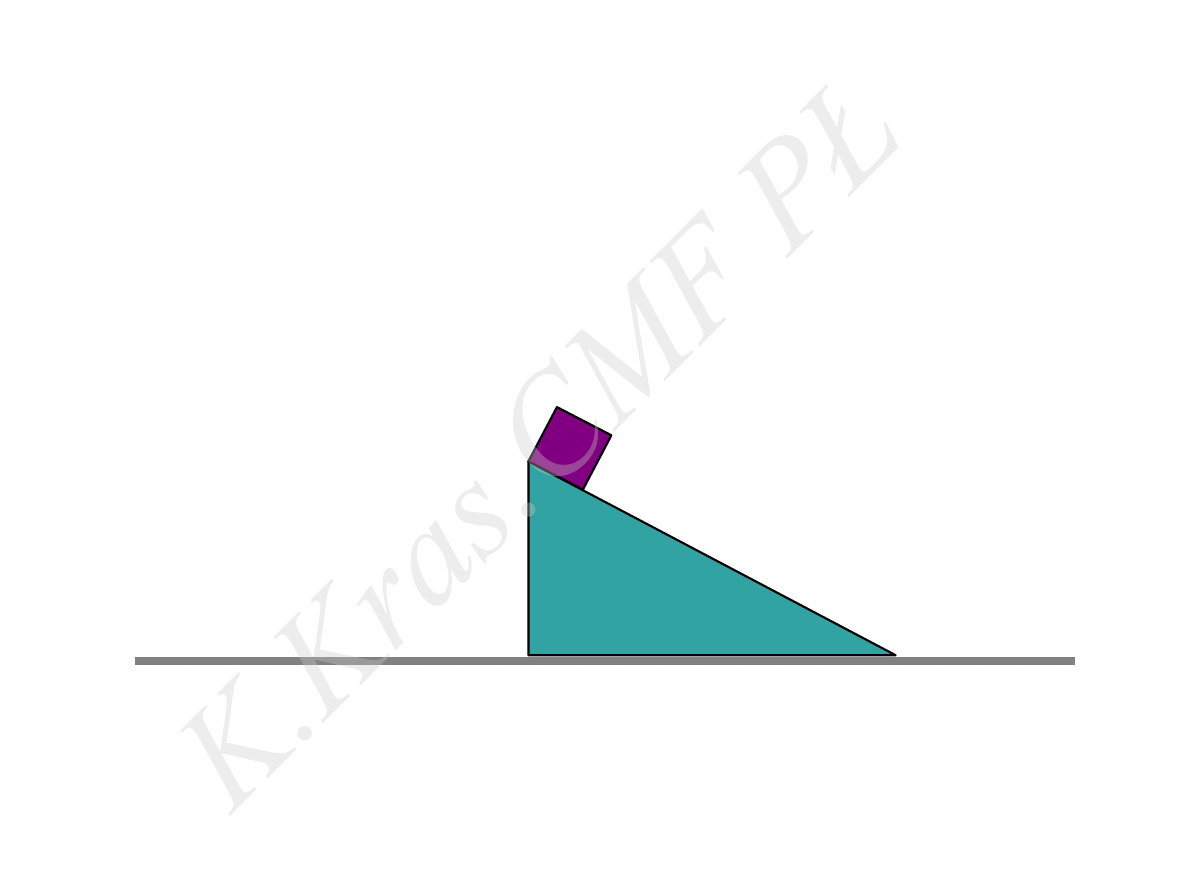
Przykład 3
.
l
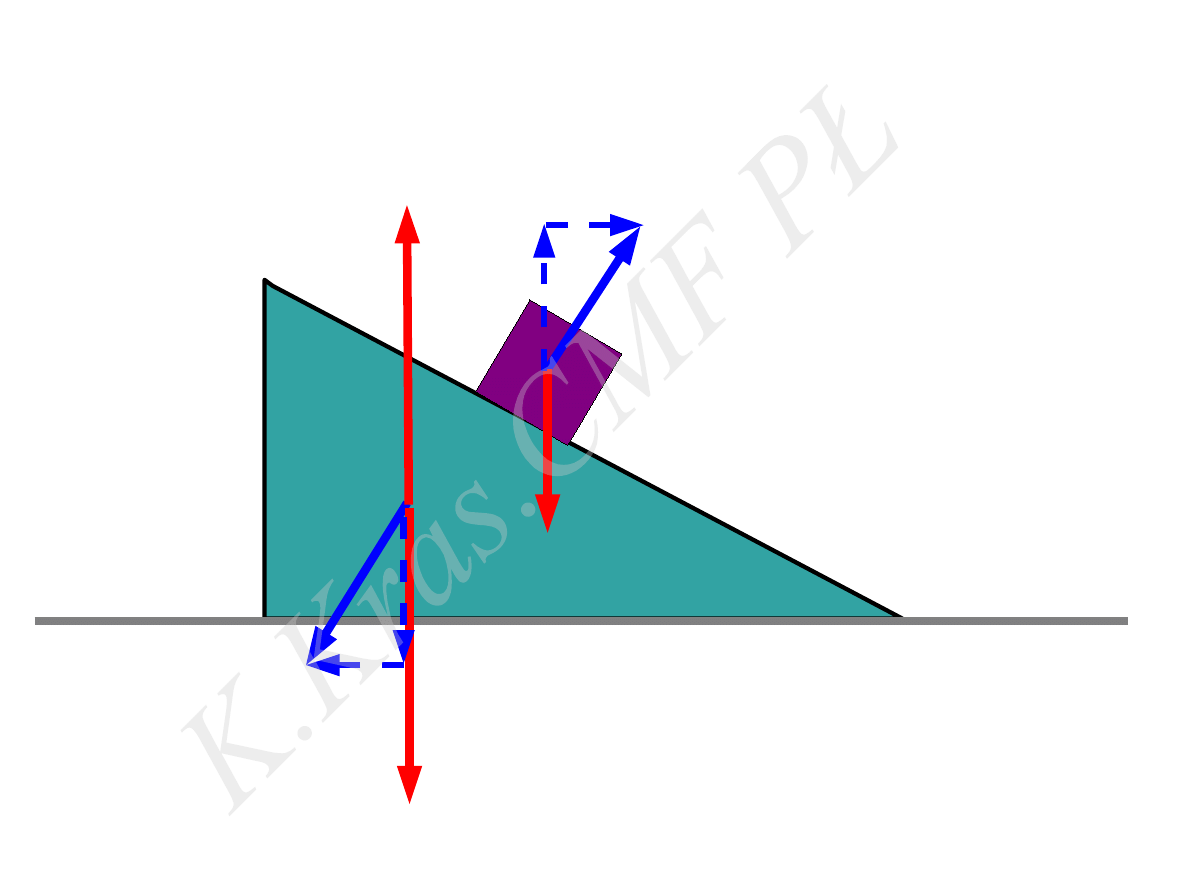
⃗
R
1
⃗
R
1
⃗
mg
⃗
R
2
⃗
Mg
siły wewnętrzne
siły zewnętrzne
układ: m i M
l
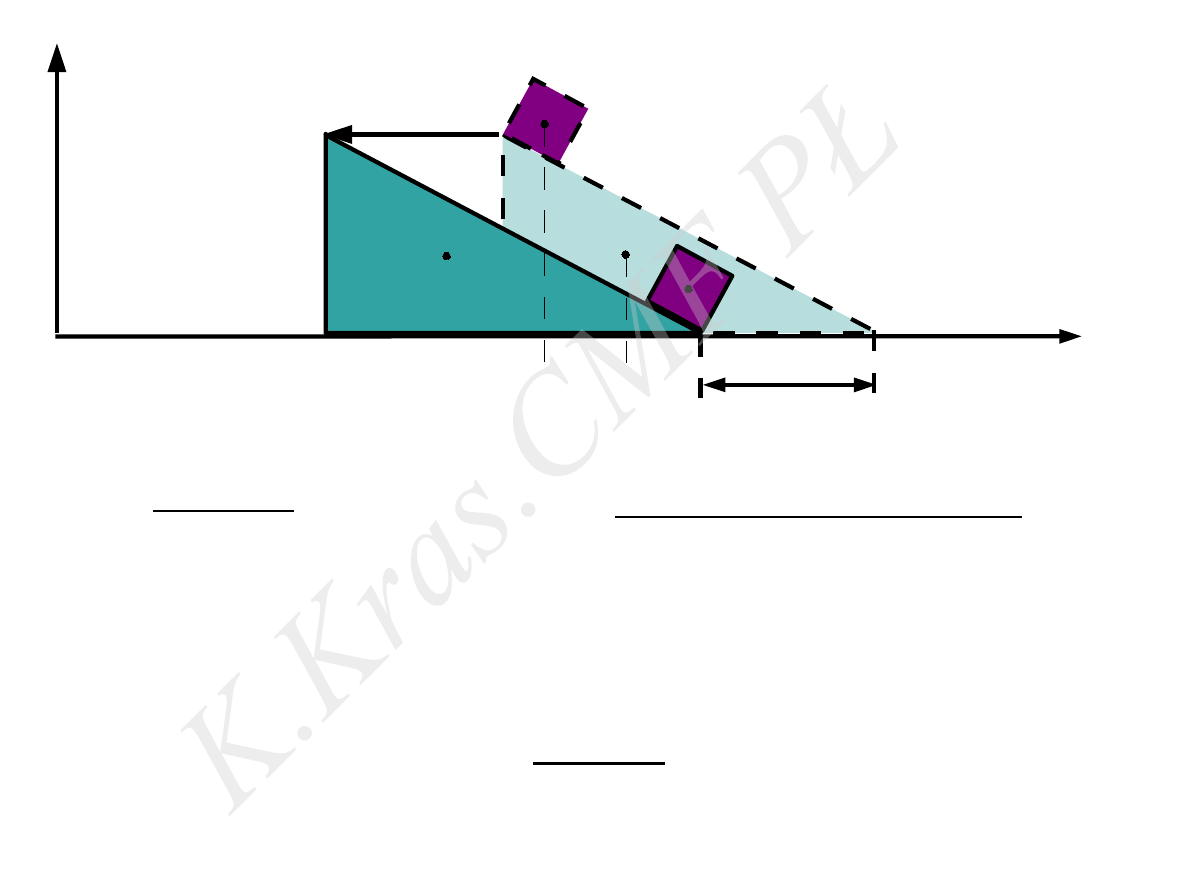
M
m
x
y
M
m
a
b
l
s
M
x
ś0
=
ma+Mb
m+M
0
x
śk
=
m(a+l−s
M
)+
M (b−s
M
)
m+M
x
ś0
=
x
śk
s
M
=
m
m+M
l
s
M
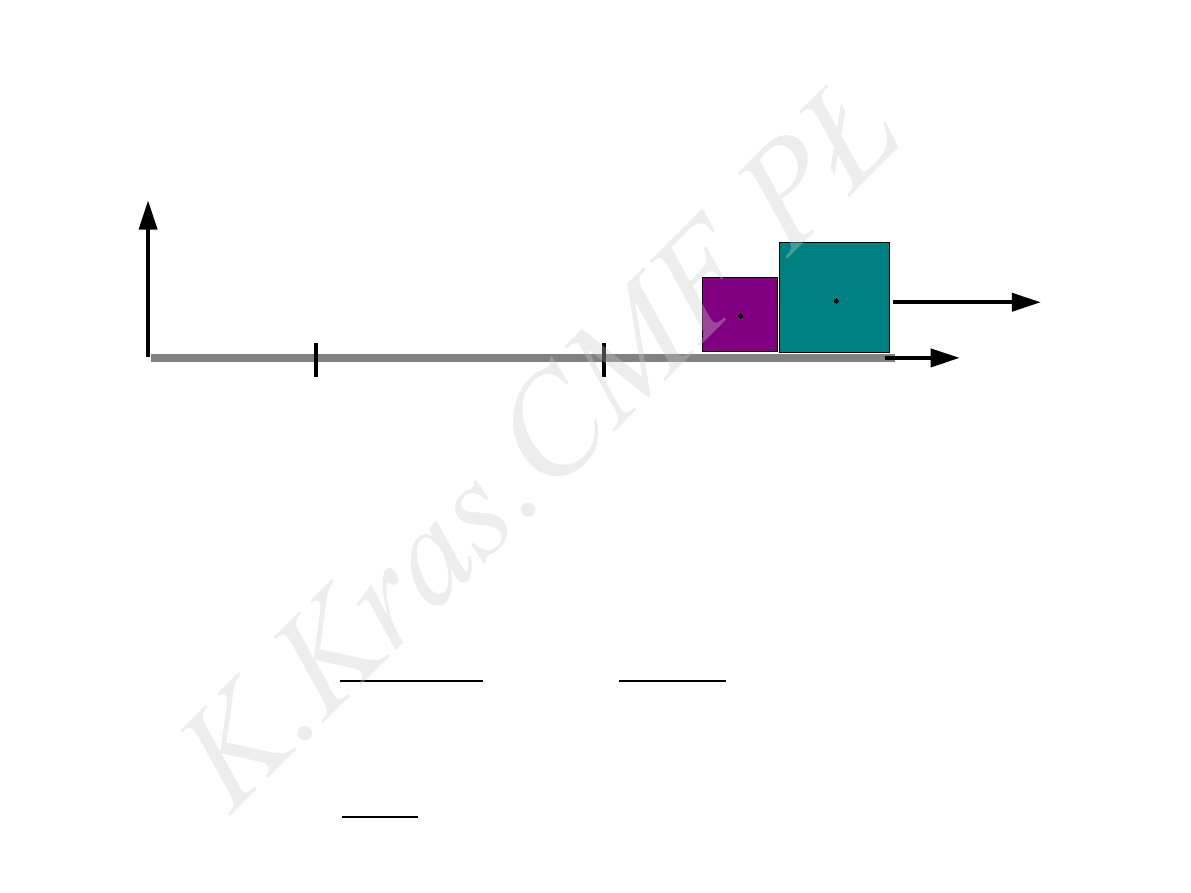
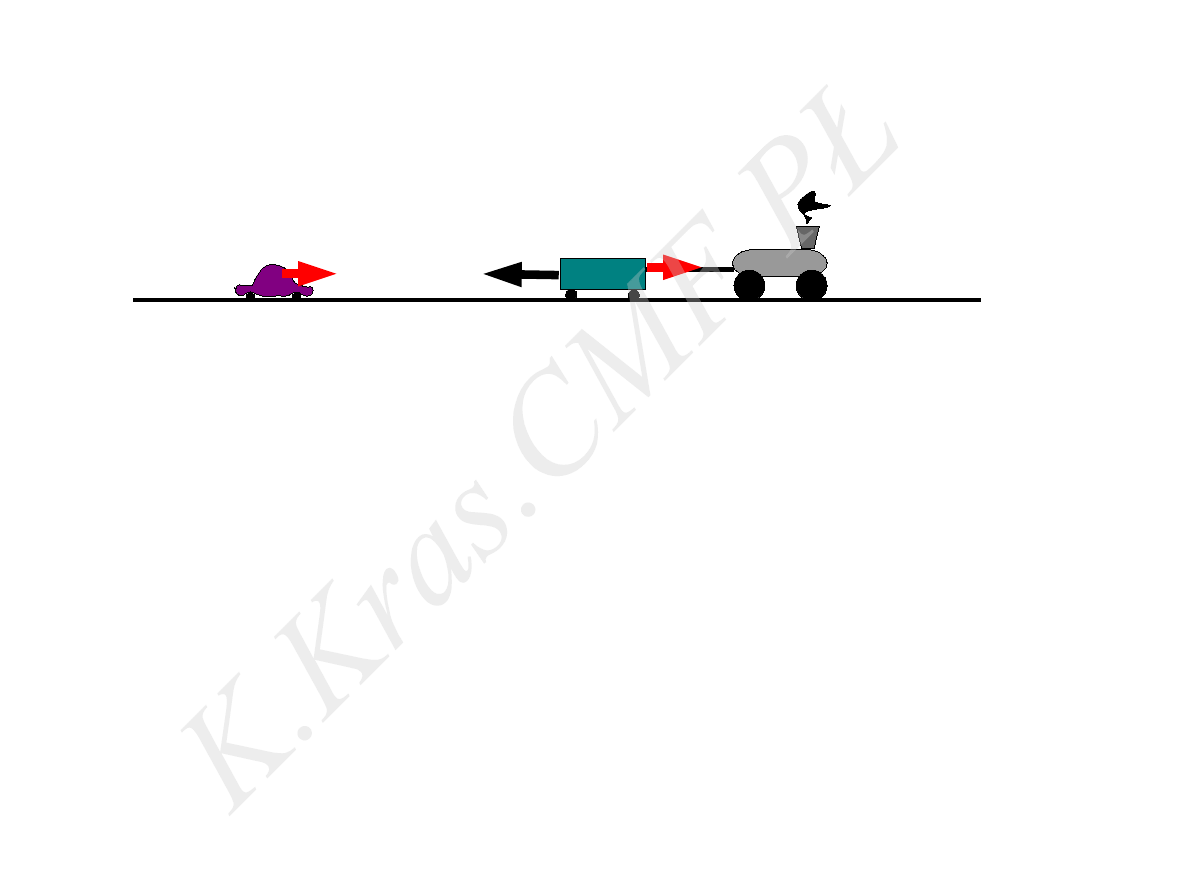
układ nieinercjalny
przyspieszenie
przyspieszenie
t =t
1
t =t
2
>
t
1
obiekt obserwowany –
dom
układ odniesienia -
samochód
siły( poziome), działające na dom –
brak
wynik obserwacji:
obiekt porusza się
z przyspieszeniem
⃗b ≠0
⃗b ≠0
I zasada dynamiki –
NIE spełniona
układ odniesienia -
samochód
, obiekt obserwowany -
wagon
⃗b
m
⃗b
⃗b
m
⃗b
⃗b
siła( pozioma), działająca na wagon
– działa
wynik obserwacji:
obiekt spoczywa
II zasada dynamiki –
NIE spełniona
układ nieinercjalny
⃗
F
m
⃗
B =−m ⃗b
⃗b
⃗
F
⃗
F
B - siła bezwładności
⃗
F
m
⃗
B =−m ⃗b
m⃗a = ⃗F +⃗B = 0
⃗a = 0
⃗b
⃗a = przyspieszenie wagonu wzgl. samochodu
układ nieinercjalny
m a = F −B = 0
dynamiczne równanie ruchu wagonu względem samochodu
Document Outline
- Slajd 1
- Slajd 2
- Slajd 3
- Slajd 4
- Slajd 5
- Slajd 6
- Slajd 7
- Slajd 8
- Slajd 9
- Slajd 10
- Slajd 11
- Slajd 12
- Slajd 13
- Slajd 14
- Slajd 15
- Slajd 16
- Slajd 17
- Slajd 18
- Slajd 19
- Slajd 20
- Slajd 21
- Slajd 22
- Slajd 23
- Slajd 24
- Slajd 25
- Slajd 26
- Slajd 27
- Slajd 28
- Slajd 29
- Slajd 30
- Slajd 31
- Slajd 32
Wyszukiwarka
Podobne podstrony:
Fizyka 2, Elektrotechnika AGH, Semestr II letni 2012-2013, Fizyka II - Wykład, EGZAMINY z zeszłych l
Egz1DDD-2010, Elektrotechnika AGH, Semestr II letni 2012-2013, Fizyka II - Wykład, EGZAMINY z zeszły
Fizyka 2, Elektrotechnika AGH, Semestr II letni 2012-2013, Fizyka II - Wykład, EGZAMINY z zeszłych l
Egz1CCC-2010, Elektrotechnika AGH, Semestr II letni 2012-2013, Fizyka II - Wykład, EGZAMINY z zeszły
zag-2010, Elektrotechnika AGH, Semestr II letni 2012-2013, Fizyka II - Wykład, EGZAMINY z zeszłych l
Fizyka 2, Elektrotechnika AGH, Semestr II letni 2012-2013, Fizyka II - Wykład, EGZAMINY z zeszłych l
Program wykładu Fizyka II
fizyka egzamin II sem, Akademia Morska, 1 rok, Fizyka, FIZYKA1, Fizyka, Semestr 2, Wykład
Program wykładu Fizyka II 2014 2015
fizyka skrypt z wykładów sem II
Program wykładu Fizyka II
fizyka skrypt z wykładów sem II
Program wykładu Fizyka II 2014 2015
ASD od z Sawanta II Wykład17 6
II wyklad Interakcje i rodzaje wiedzy
więcej podobnych podstron