
1
PODSTAWOWE POJĘCIA
WYTRZYMAŁOŚCI MATERIAŁÓW
1. Przedmiot i zakres wytrzymałości materiałów
Wytrzymałość materiałów jest nauką o
trwałości spotykanych w praktyce ty-
powych elementów konstrukcji
(ciał odkształcalnych), poddanych działaniu ob-
ciążenia zewnętrznego (sił i momentów). Jej podstawą są
prawa i zasady mecha-
niki ogólnej
, w której badane ciała są rozpatrywane jako elementy sztywne. Bada-
nia doświadczalne wykazują, że takie bezwzględnie sztywne elementy maszyn nie
istnieją i przy działaniu obciążeń zewnętrznych każde ciało odkształca się. Wy-
trzymałość materiałów uwzględnia zdolność ciał stałych do odkształcania i
zaj-
muje się badaniem oraz ustalaniem zależności odkształceń od sił zewnętrz-
nych
, działających na rozpatrywane elementy konstrukcyjne.
Podstawowe zadania wytrzymałości materiałów to określenie, czy dana konstruk-
cja nie ulegnie zniszczeniu na skutek oddziaływującego na nią obciążenia oraz jak
się odkształci na skutek działania tych obciążeń.
W wytrzymałości materiałów dokonujemy podstawowych uproszczeń, które doty-
czą samego materiału i opisu kształtu ciała.
Materiał
jednorodny
ciała to taki, którego interesujące nas właściwości fizyczne
są takie same w każdej jego części. Jeżeli ciało nie spełnia tego warunku, to jego
materiał uważamy za
niejednorodny
. Z pojęcia jednorodność wynika, że w
uproszczonym modelu materiał wypełnia objętość ciała w sposób ciągły. Przy ana-
lizie takiego ciała można wówczas stosować pojęcia i cały aparat analizy matema-
tycznej, jak różniczkowanie i całkowanie.
Materiały rzeczywiste
, które moją takie same właściwości fizyczne bez względu
na rozpatrywany kierunek nazywamy
izotropowymi
, a materiały, które moją różne
właściwości fizyczne w zależności od kierunku nazywamy
anizotropowymi.
Większość analizowanych zagadnień w wytrzymałości materiałów rozpatruje się
przy założeniu
idealnej sprężystości
materiału, gdzie wywołane obciążeniem od-
kształcenia znikają całkowicie po zaprzestaniu działania obciążenia Przeciwień-
stwem ciała idealnie sprężystego jest
ciało idealnie plastyczne
, tzn. takie, którego
odkształcenia wywołane obciążeniem mają charakter trwały. Należy zaznaczyć, że
w rzeczywistości ciała idealnie sprężyste oraz idealnie plastyczne nie istnieją.
2
2. Siły zewnętrzne, wewnętrzne i naprężenia
Siły stanowią obciążenie ciał rzeczywistych. Przy izolowaniu rozpatrywanego cia-
ła od innych, pierwotnie z nim połączonych ciał, zastępuje się ich działanie na to
ciało siłami, które nazywamy
zewnętrznymi
. Siły zewnętrzne występują jako tzw.
siły czynne
obciążające ciało i jako reakcje więzów, tzw. siły bierne, uzupełniają-
ce układ sił czynnych do układu będącego w równowadze.
Siły wewnętrzne
rów-
nież tworzą układ zrównoważony i dlatego nie można ich wyznaczyć z warunków
równowagi całego ciała. Siły te stanowią oddziaływania między poszczególnymi
elementami ciała.
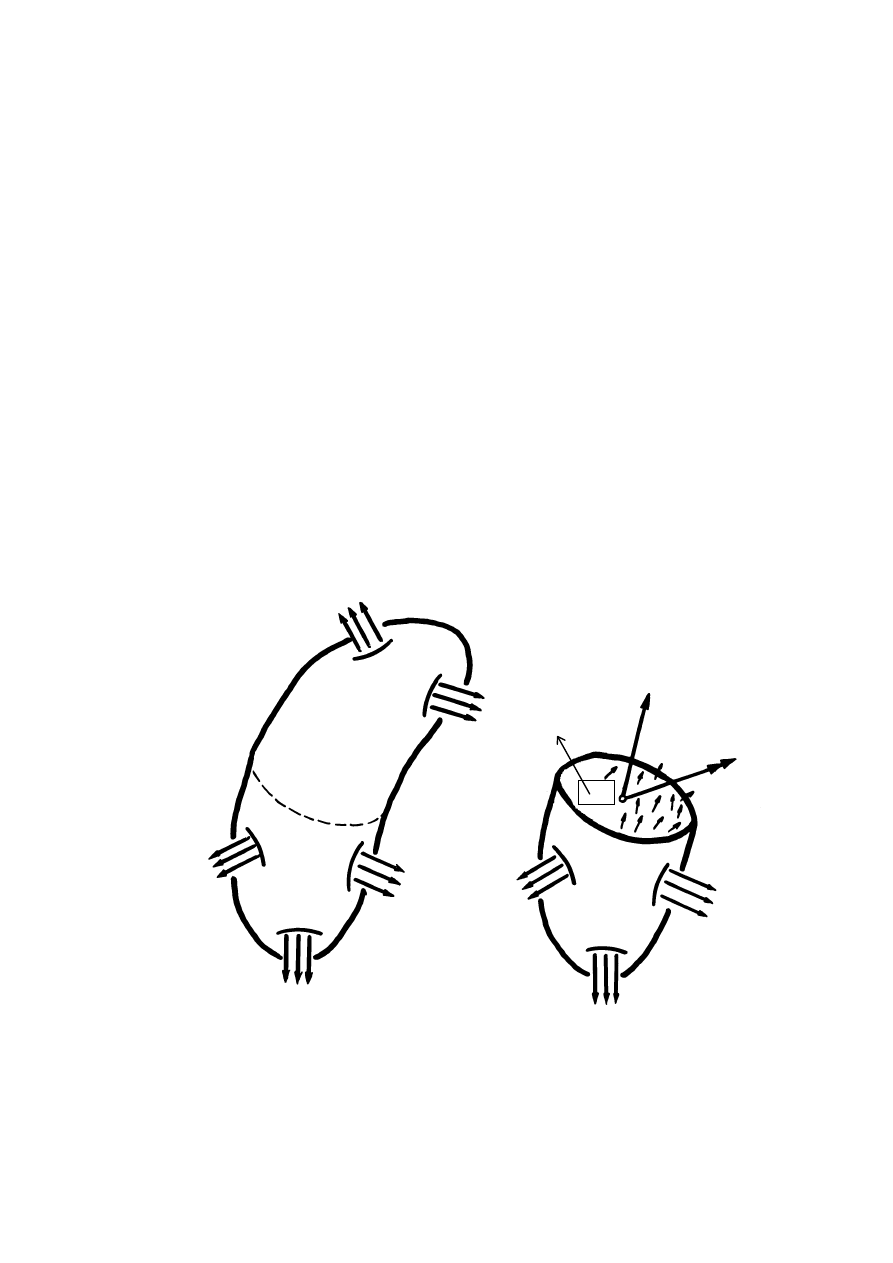
W celu ujawnienia sił wewnętrznych stosuje się
metodę przecięć.
Rozpatrzmy ciało obciążone siłami zewnętrznymi P
1
, ..., P
5
, będące w równowa-
dze (rys.1a). Myślowo przetniemy je płaszczyzną na dwie części. Część II odrzu-
camy, a jej oddziaływanie na część I zastąpimy siłami zapewniającymi równowagę
tej części. Siły te są siłami wewnętrznymi. Założenie ciągłości materii prowadzi
do wniosku, że siły wewnętrzne są rozłożone powierzchniowo w sposób ciągły.
Weźmy pod uwagę dowolny punkt C leżący na powierzchni przekroju I (rys.1b).
Wydzielając wokół niego element powierzchni o polu
∆
A, redukuje się siły we-
wnętrzne działające w obrębie tego elementu do punktu C, uzyskując wektor
∆
P
w
.
P
1
P
2
P
3
P
4
P
5
P
1
P
2
P
3
I
I
II
∆
A
∆
P
w
P
w
M
w
b)
a)
Rys. 1. Przedstawienie sił wewn
ę
trznych
3
Naprężenie p
w tym punkcie wyraża się wzorem
p
P
=
→
lim
∆
∆
∆
A
w
A
0
(1)
Kierunek i zwrot tego naprężenia jest taki, jaki ma elementarna siła
∆
P
w
.
Podstawową jednostką naprężenia jest Pascal (Pa)
1Pa
1
N
m
2
=
Praktycznie jest stosowana jednostka milion razy większa - megapaskal (MPa)
1MPa
10 Pa
10
N
m
1
N
mm
6
6
2
2
=
=
=
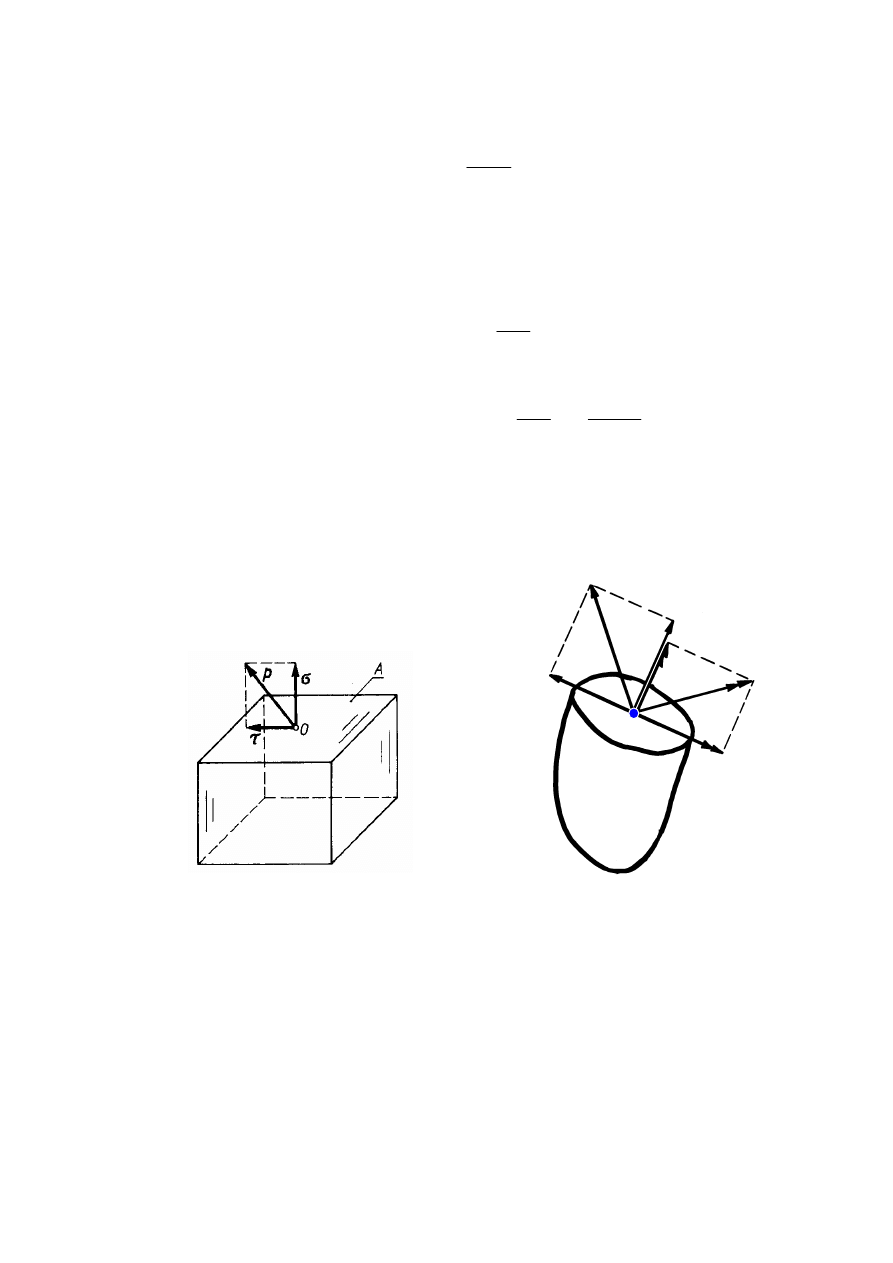
Naprężenie p występujące na danej powierzchni można rozłożyć na dwie składo-
we (rys.2):
•
σσσσ
- naprężenie normalne - składowa normalna do powierzchni
•
τ
- naprężenie styczne - składowa styczna do powierzchni
T
N
P
w
Ms
M
w
Mg
Rys. 2. Rozkład p na jego składowe
Rys. 3. Rozkład głównych sił wewn
ę
trznych
na ich składowe
Naprężenia p z całej powierzchni przekroju I można zredukować do dowolnego
punktu leżącego na tej powierzchni otrzymując wektor główny P
w
i moment głów-
ny M
w
(rys.1b). Oba wektory rozkładają się na wektory styczne i normalne do po-
wierzchni przekroju (rys.3) dając:
•
N - siłę normalną - wywołującą rozciąganie lub ściskanie
•
T - siłę styczną - wywołującą ścinanie
•
Ms - moment skręcający - wywołujący skręcanie
•
Mg - moment gnący - wywołujący zginanie
4
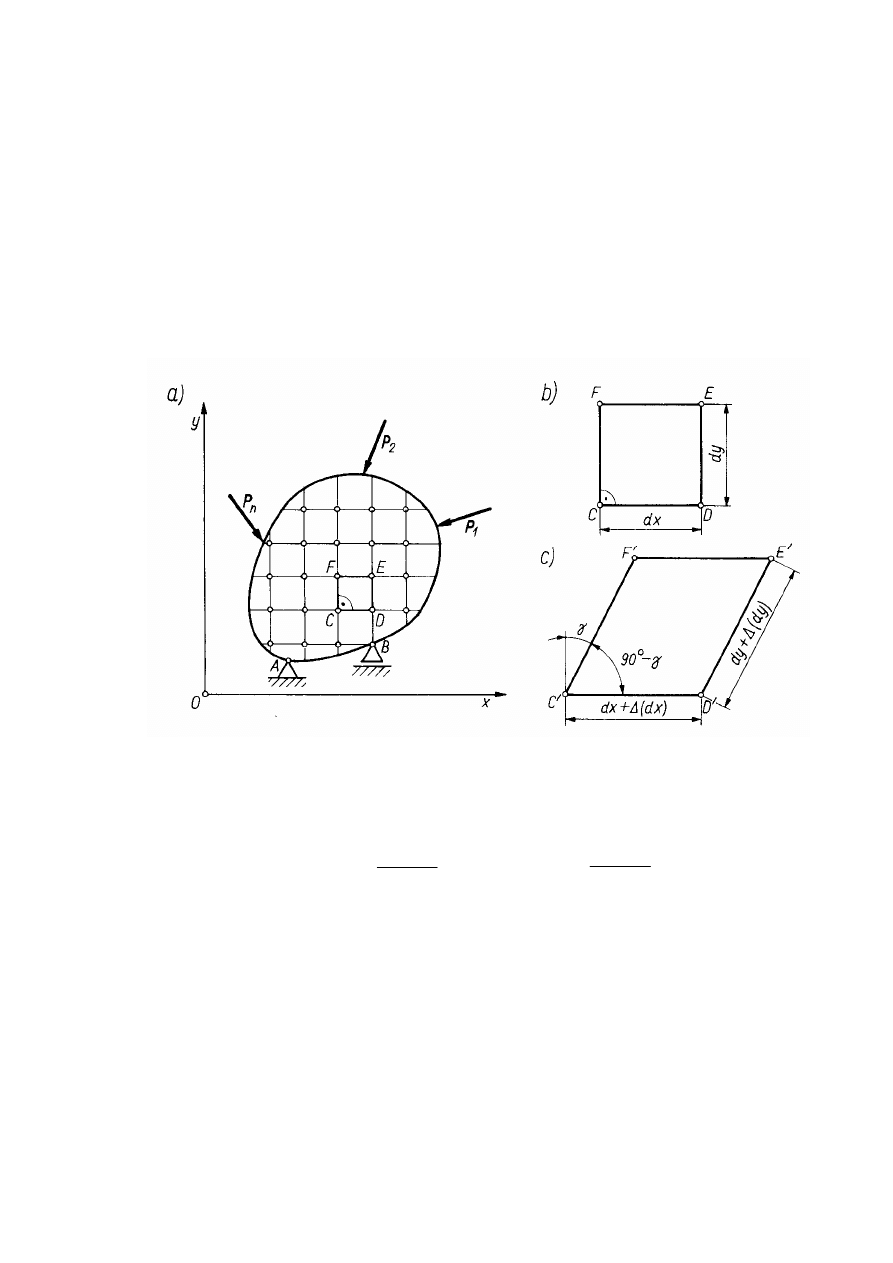
3. Pojęcie odkształcenia ciała sprężystego
Pod wpływem sił zewnętrznych elementy konstrukcyjne zmieniają swoje pierwot-
ne kształty i wymiary. Zmiany te jednoznacznie określają
odkształcenia liniowe
i
odkształcenia postaciowe.
Rozpatrzmy ciało będące w równowadze (rys.4a). Na nieodkształconym ciele my-
ś
lowo obieramy cztery punkty wyznaczające elementarny prostokąt CDEF. Boki
prostokąta mają długości odpowiednio dx i dy (rys. 8.3b). Po obciążeniu ciała si-
łami zewnętrznymi P
1
, P
2
, P
3
, ...,P
n
, punkty CDEF przesuną się przyjmując nowe
położenie C'D'E'F'. Na skutek tego przesunięcia długości boków prostokąta zmie-
nią się o
∆
(dx) i
∆
(dy). Wartości te nazywane są
wydłużeniami bezwzględnymi
.
Rys. 4. Okre
ś
lenie wzgl
ę
dnych odkształce
ń
i k
ą
ta odkształcenia postaciowego
Stosunek tych wydłużeń do pierwotnych długości nazywany jest wydłużeniem
względnym-
odkształceniem liniowym
określony wzorem
( )
ε
x
dx
dx
=
∆
( )
ε
y
dy
dy
=
∆
(2)
Zmiana długości odcinków dx i dy powoduje równoczesny obrót boków CF i DE o
kąt
γ
. Kąt ten będący różnicą kąta prostego FCD i nowo powstałego kąta F'C'D'
(rys.4c) nazywany jest kątem odkształcenia postaciowego lub
odkształceniem po-
staciowym
. Wyraża się go w radianach.
Wartości odkształceń zależą od wielkości i kierunku działania sił. Zbiór wydłużeń
względnych
ε
x
,
ε
y
, i odkształceń postaciowych
γ
w określonym punkcie we wszyst-
kich możliwych kierunkach jest nazywany
stanem odkształcenia
tego punkt.
5
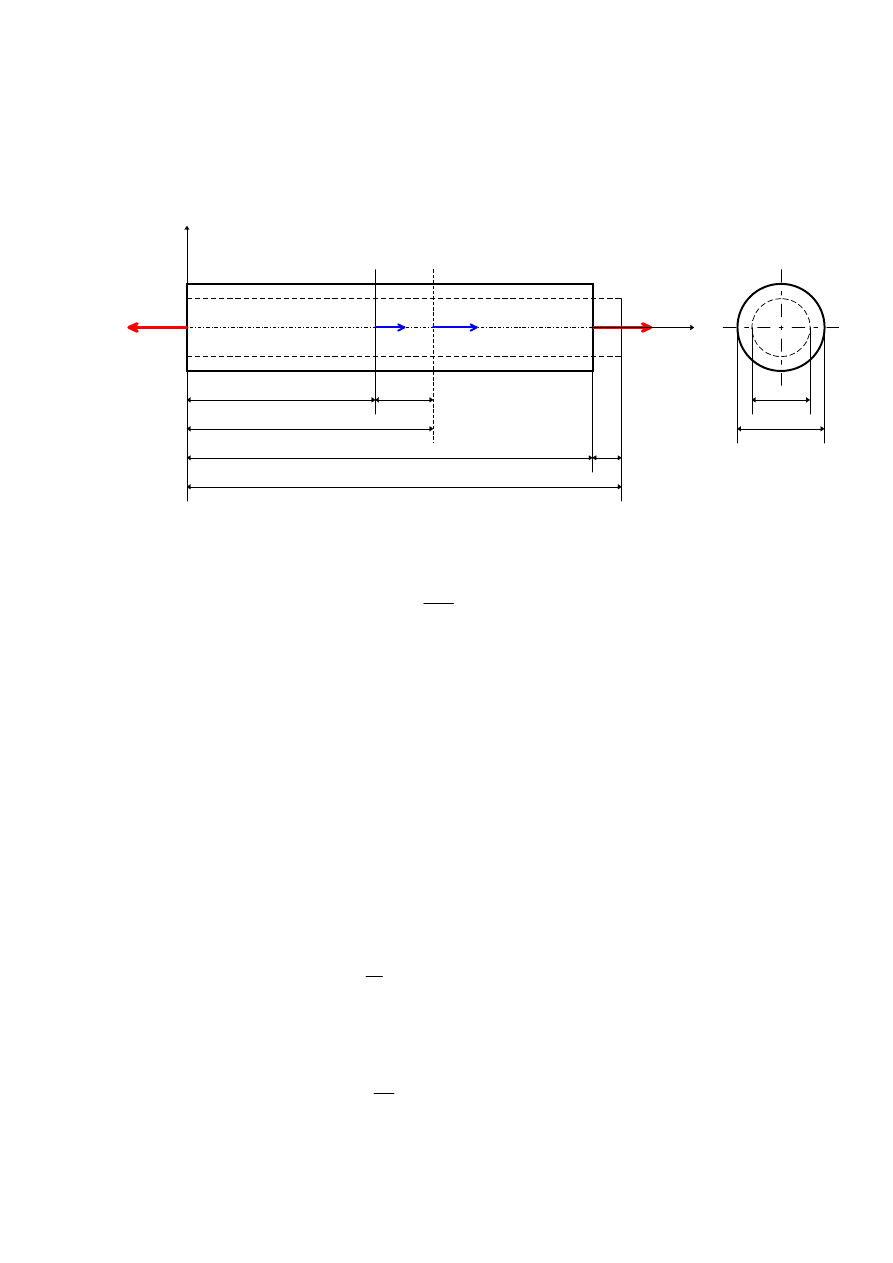
4. Prawo Hooke'a w przypadku prostego rozciągania
Rozpatrzmy pręt o stałym przekroju A, obciążony dwiema przeciwnie skierowa-
nymi siłami P (rys.5).
P
P
u
u+
∆
u
A
A
B
B
x
1
x
2
dx
x
y
l
d
d'
l’
λ
Rys. 5. Odkształcenia pryzmatycznego pr
ę
ta rozci
ą
ganego
Wydłużenie względne odcinka dx wynosi
ε
=
du
dx
(3)
gdzie: u - przemieszczenie przekroju A-A, u+du - przemieszczenie przekroju B-B.
W przypadku szczególnym gdy wydłużenie względne
ε
jest stałe, całkowite wy-
dłużenie pręta wynosi
du
dx
=
ε
(
)
u
dx
x
x
x
x
=
=
−
∫
ε
ε
1
2
2
1
(4)
u
l
l l
x l
=
=
= − =
ε
λ
'
Stąd
ε
λ
=
l
(5)
Naprężenia
powstałe w rozpatrywanym przekroju poprzecznym pręta są napręże-
niami normalnymi
[MPa]
A
P
=
σ
(6)
6
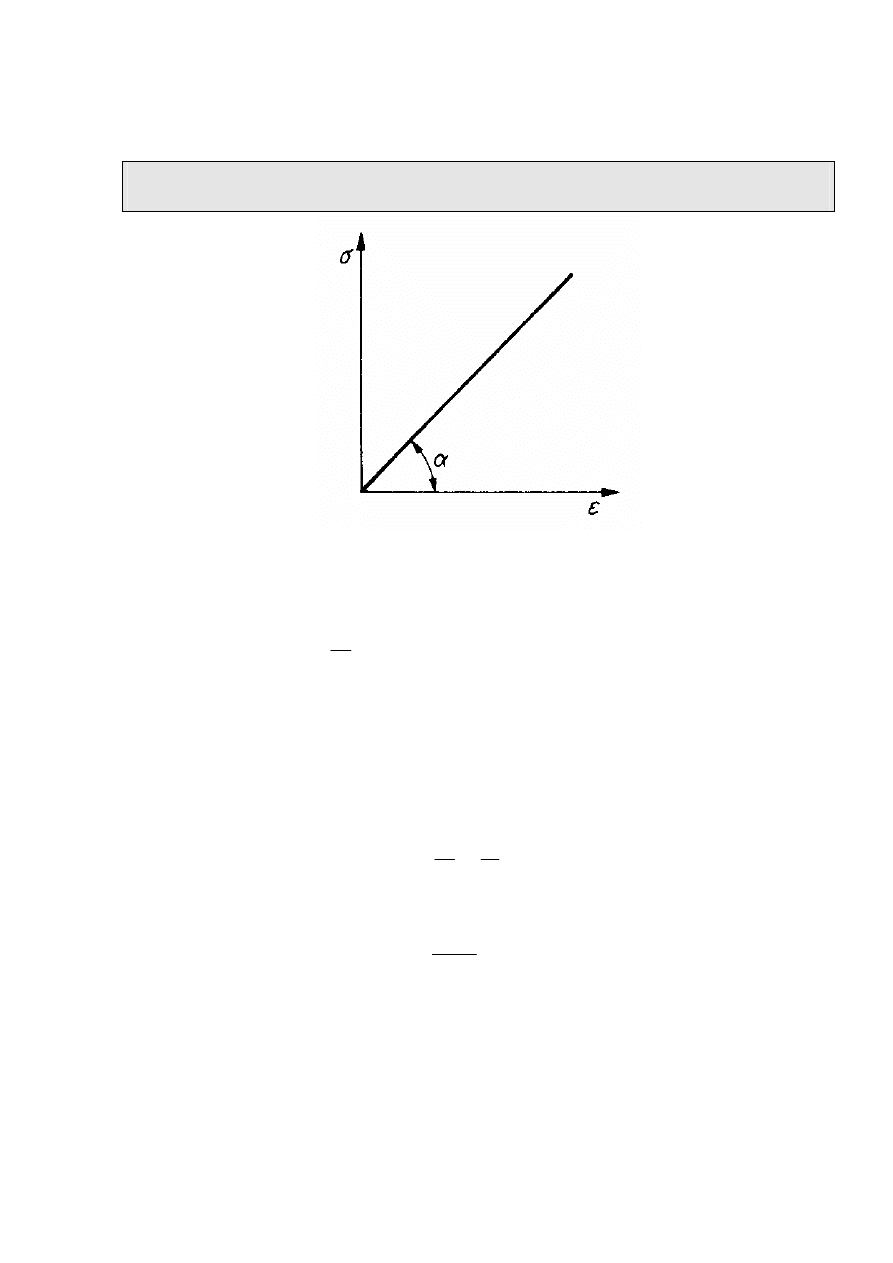
W materiałach izotropowych, sprężystych zachodzą liniowe zależności pomiędzy
naprężeniem
σ
i wydłużeniem względnym
ε
. Pierwszy określił je Robert Hook’e w
1672 r. przeprowadzając doświadczenia z prętami.
ROBERT HOOKE (1635 - 1703)
„UT TENSIO SIC VIS” „JAKIE WYDŁUśENIE, TAKA SIŁA”
Rys. 6. Zale
ż
no
ść
mi
ę
dzy napr
ęż
eniem i wydłu
ż
eniem wzgl
ę
dnym
dla ciała idealnie liniowo-spr
ęż
ystego
Na podstawie tej zależności (rys.6) można napisać równanie
σ
ε
α
=
=
tg
E
(7)
oraz
σ ε
=
E
(8)
gdzie E - współczynnik (moduł) sprężystości wzdłużnej (moduł Younga)
Uwzględniając w równaniu (8) zależności (4) i (6)
P
A
l
E
=
λ
Skąd
λ
=
Pl
AE
(9)
Zgodnie z prawem Hooke 'a, z zależności tej wynika, że wydłużenie jest propor-
cjonalne do siły P, która je spowodowała.

7
Podczas rozciągania pręta oprócz wydłużenia, równocześnie jego średnica ulega
zwężeniu -
wydłużeniu poprzecznemu
. Wyznacza się je z zależności
ε
'
'
=
−
d d
d
(10)
Dla materiałów izotropowych wydłużenie poprzeczne
ε
’ są jednakowe we wszyst-
kich kierunkach prostopadłych do osi pręta i również podlegają prawu Hooke'a.
Dlatego w zakresie słuszności tego prawa wydłużenie poprzeczne
ε
’, jest propor-
cjonalne do wydłużenia wzdłużnego
ε
. Stosunek wydłużenia poprzecznego i
wzdłużnego dla danego materiału izotropowego jest stały i określa go bezwymia-
rowy współczynnik Poissona
ν
.
ε
ε
ν
'
= −
(11)
Liczba Poissona dla materiałów izotropowych zawiera się w przedziale 0 <
ν
<
0.5.
4.
Zasada de Saint-Venanta
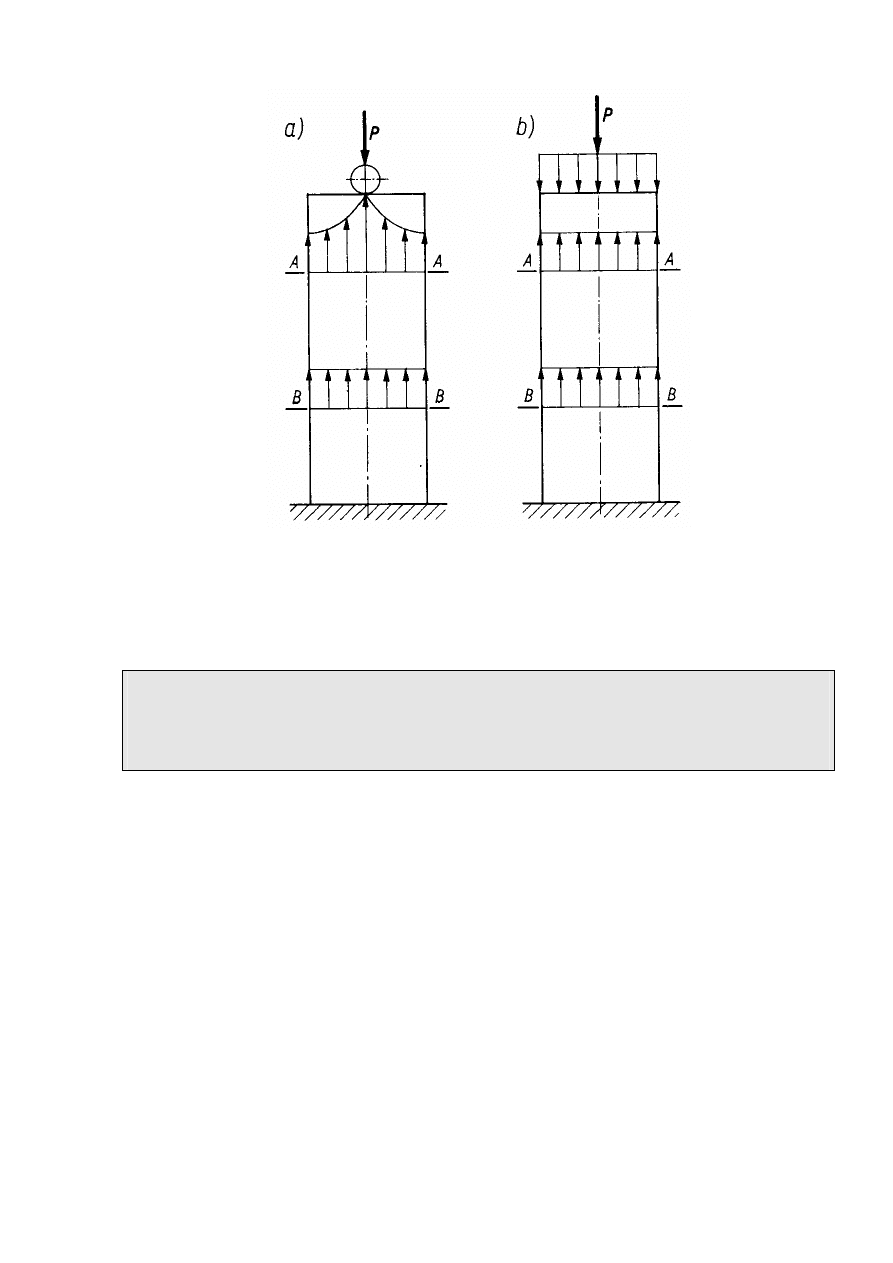
Rozważmy dwa statycznie równoważne obciążenia ściskające pręt zrealizowane w
różny sposób pokazane na rys. 7. Pręt wykonany jest z materiału izotropowego o
stałym przekroju.
Na podstawie dokładnych badań stwierdzono, że dla pręta obciążonego siłą sku-
pioną, naprężenia w pobliżu punktu przyłożenia siły są bardzo duże, które na dłu-
gości pręta bardzo szybko się wyrównują (rys.7a).
Dla przekroju znajdującego
się w odległości przekraczającej poprzeczne wymiary przekroju rozkład sił
wewnętrznych można uważać za równomierny.
Dla pręta obciążonego siłą ciągła rozkład sił wewnętrznych można uważać za rów-
nomierny na całej długości pręta, również w pobliżu przyłożenia obciążenia
(rys.7b).
8
Rys. 7. Pr
ę
ty obci
ąż
one statycznie równowa
ż
nymi obci
ąż
eniami
Z analizy stanu naprężenia obu przypadków wynika, że
sposób przyłożenia ob-
ciążenia nie ma istotnego wpływu na rozkład sił wewnętrznych
w przekrojach
dostatecznie oddalonych od miejsca przyłożenia obciążenia. Wniosek ten sformu-
łował de Saint-Venant.
Jeżeli na pewien niewielki obszar ciała sprężystego będącego w równowadze dzia-
łają kolejno rozmaicie rozmieszczone, ale statycznie równoważne obciążenia, to w
odległości od obszaru przewyższającej wyraźnie jego wymiary powstają praktycz-
nie jednakowe stany naprężenia i odkształcenia.
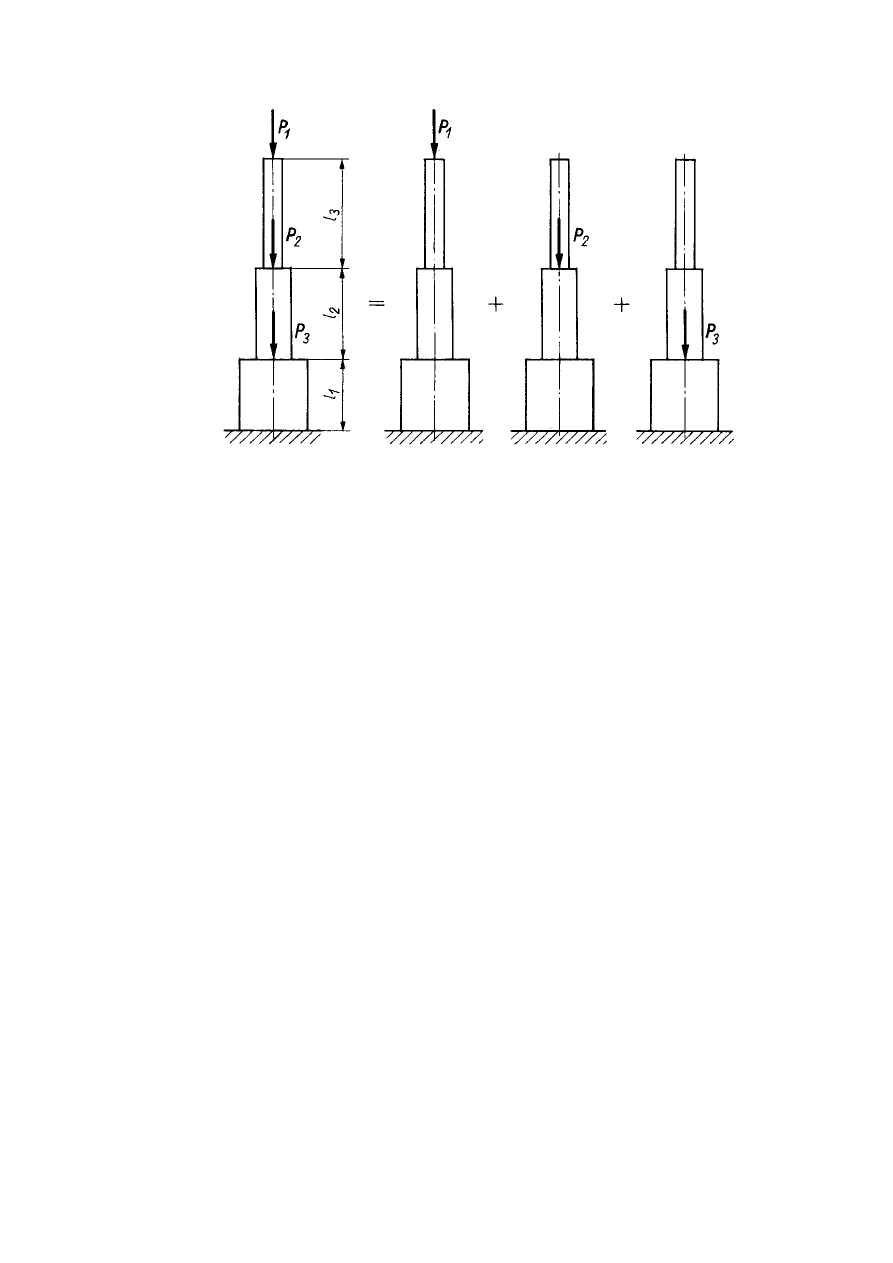
6. Zasada superpozycji
W przypadku działania na konstrukcję jednocześnie kilku sił zewnętrznych można
przy wyznaczaniu naprężeń i odkształceń stosować
zasadę superpozycji
. Zasada ta
polega na rozpatrywaniu
oddzielnie skutków działania każdej z sił osobno i su-
mowaniu tych skutków
. Jeżeli konstrukcja jest obciążona trzema siłami P
1
, P
2
i
P
3
(rys. 8), należy najpierw obliczyć
naprężenia
i
odkształcenia
powstałe w wy-
niku działania każdej z sił oddzielnie, a następnie zsumować (uwzględniając zna-
ki) otrzymane naprężenia i odkształcenia.
9
Rys. 8. Ilustracja zasady superpozycji
Podstawowym warunkiem zasady superpozycji jest sprężystość materiału, a więc
można ją stosować w granicach ważności prawa Hooke'a.
Wyszukiwarka
Podobne podstrony:
Vol 14 Podst wiedza na temat przeg okr 1
podst gospod grunt s 6 w 12
Podst elektron i energoelekron wyklad1
wprowadzenie do systemu win i podst sieci
Podst rehabilitacji
Podst wskazniki makro dla Polsk Nieznany
2015 05 podst
2015 06 podst SM
2 Funkcje pojecia podst
PHP podst progr suplement wyklad grudzien 2011
fizyka 2009 listopad podst
ćwiczenia ortograficzne ''ó'', Sz.Podst. - testy,sprawdziany i inne
więcej podobnych podstron