
MODEL POJAZDU DO TRANSPORTU
PALIW PŁYNNYCH NA PRZYKŁADZIE WYBRANEGO
OPERATORA TRANSPORTOWEGO
Uwagi wstępne
Celem opracowania jest wskazanie na jedną z możliwości analizy gotowości pojazdów
metodami modelowania i symulacji komputerowej na przykładzie pojazdów
eksploatowanych przez wybranego operatora transportu paliw płynnych. Realizację
tego celu przeprowadzono w następujących krokach:
•
prezentacja systemu pojazdów wybranego operatora transportu paliw płynnych;
•
stworzenie modelu matematycznego stanów eksploatacyjnych pojazdu do
transportu paliw płynnych;
•
opis symulacyjnego modelu komputerowego oraz wskazanie możliwości jego
zastosowania do analiz gotowości pojazdów do transportu paliw płynnych.
O systemie pojazdów wybranego operatora transportu paliw płynnych
Ważnym elementem systemów logistycznych jednego z koncernów paliwowych
działających w Polsce są spółki transportowe. W ramach spółek transportowych
funkcjonują dyspozytornie. Zadaniem dyspozytorów pracujących we wszystkich
spółkach transportowych jest organizacja dostaw paliw do stacji paliw koncernu oraz do
jego klientów indywidualnych. Dostawy paliw do stacji własnych koncernu odbywają
się według ściśle określonego planu. W planie tym uwzględnia się m.in.:
−
obszar działania spółki transportowej,
−
punkty zaopatrzenia (bazy magazynowe koncernu),
−
liczbę stacji paliw koncernu leżących w obszarze działania spółki transportowej.
W ramach jednej ze spółek transportowych koncernu paliwowego działa m.in.
dyspozytornia Y. Dyspozytornia Y dostarcza paliwa płynne do kilkudziesięciu stacji
paliw koncernu. Stacje te są rozmieszczone głównie w jednym z południowych
województw a punktami ich zaopatrzenia są trzy bazy magazynowe.
W dyspozytorni Y zadania transportu paliw płynnych realizowane są za pomocą
ośmiu zestawów transportowych (pojazdów). Są to zestawy transportowe dwojakiego
rodzaju. Pierwszy rodzaj zestawu tworzą ciągnik siodłowy i naczepa cysternowa.
Drugim rodzajem zestawu jest autocysterna składająca się z samochodu i
zamontowanego na jego podwoziu wielokomorowego zbiornika cysternowego.
Wszystkie zestawy transportowe eksploatowane w dyspozytorni Y zostały
wprowadzone do użytkowania jako nowe a ich obsługiwanie w spółce transportowej
jest prowadzone przez specjalnie do tego celu zorganizowany serwis obsługowy.
Plik: Pojazd_Operator_Transportu_Paliw.doc opr. Adam Kadziński, Sławomir El
2
Stany eksploatacyjne pojazdu do transportu paliw płynnych
Podstawą analizy procesu eksploatacji pojazdów do transportu paliw płynnych
eksploatowanych w dyspozytorni Y są zdarzenia eksploatacyjne zidentyfikowane w
życiu tych pojazdów. Głównymi zdarzeniami eksploatacyjnymi są rozpoczęcia i
zakończenia planowych lub nieplanowych obsług pojazdów. Chwile czasowe tych
zdarzeń mogą być ustalane m.in. na podstawie dokumentacji procesów obsługiwania
pojazdów.
Na podstawie analizy informacji zawartych w dokumentacji procesów
obsługiwania pojazdów stwierdzono, że proces eksploatacji
{
}
0
:
)
(
5
≥
t
t
X
pojazdów do
transportu paliw płynnych jest on procesem pięciostanowym. Proces ten przyjmuje:
•
X
5
(t) = 1,
gdy pojazd w chwili t znajduje się w użytkowaniu (jest zdatny);
•
X
5
(t) = 2,
gdy w chwili t w pojeździe wykonywana jest obsługa okresowa pierwsza
i naprawa bieżąca w związku z zauważonymi uszkodzeniami;
•
X
5
(t) = 3,
gdy w chwili t w pojeździe wykonywana jest obsługa okresowa druga
i naprawa bieżąca w związku z zauważonymi uszkodzeniami;
•
X
5
(t) = 4,
gdy w chwili t w pojeździe wykonywana jest obsługa okresowa trzecia
i naprawa bieżąca w związku z zauważonymi uszkodzeniami;
•
X
5
(t) = 5,
gdy w chwili t w pojeździe wykonywana jest naprawa bieżąca.
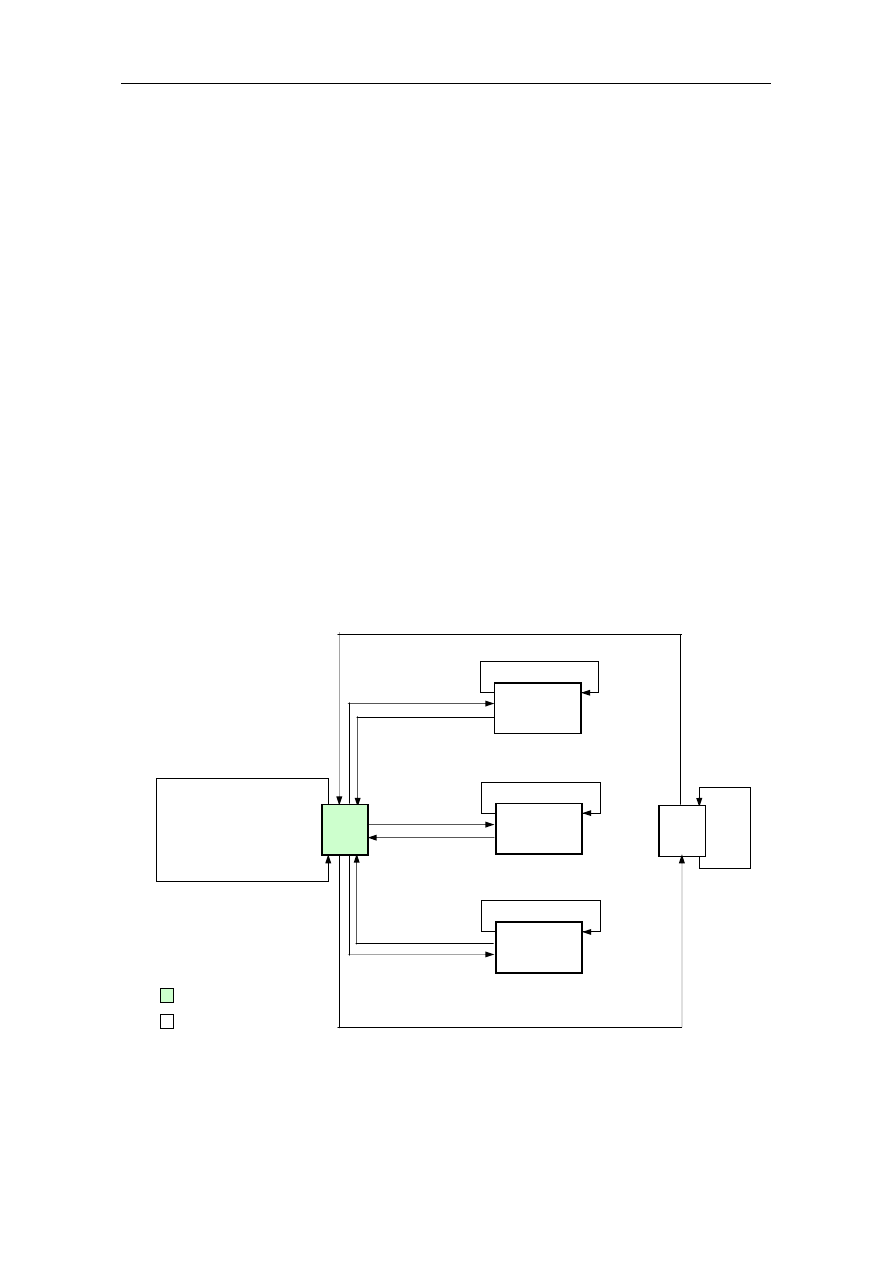
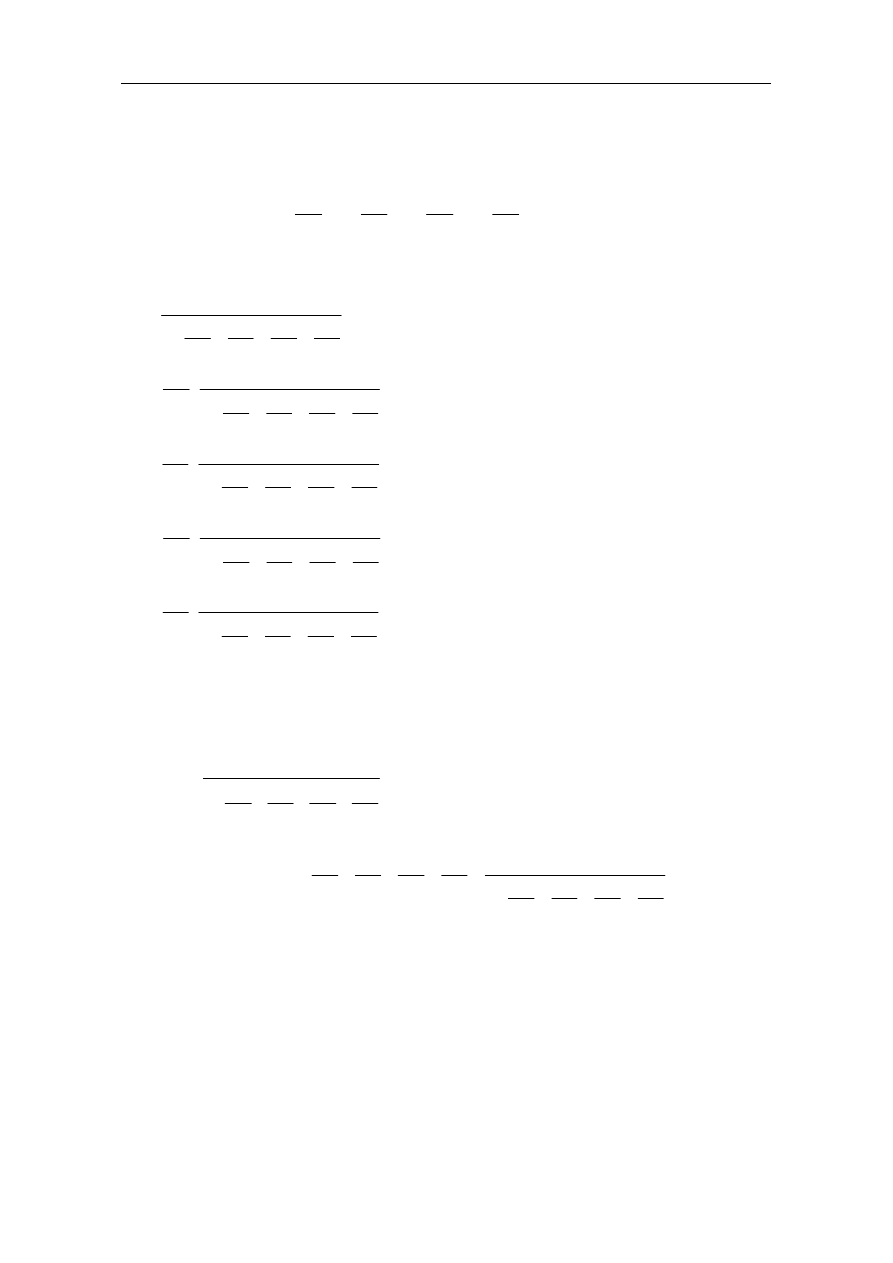
Na podstawie zidentyfikowanych stanów eksploatacyjnych pojazdów zbudowano
graf stanów modelu pojazdu do transportu paliw płynnych (rys. 1).
Rys. 1. Graf stanów modelu pojazdu do transportu paliw płynnych, gdzie: 1 (Z) – stan zdatności
(użytkowania) pojazdu, 2 (NB_OT-1) – stan obsługi okresowej pierwszej z naprawą bieżącą,
3 (NB_OT-2) – stan obsługi okresowej drugiej z naprawą bieżącą, 4 (NB_OT-3) – stan obsługi
okresowej trzeciej z naprawą bieżącą, 5 (NB) – stan naprawy bieżącej (wyjaśnienie pozostałych oznaczeń
znajduje się w tekście)
− stany zdatności
− stany niezdatności
5
NB
2
NB_OT-1
3
NB_OT-2
4
NB_OT-3
1
Z
t
,
∆
⋅
1
5
λ
t
,
∆
⋅
5
1
λ
t
,
∆
⋅
4
1
λ
t
,
∆
⋅
1
3
λ
t
,
∆
⋅
3
1
λ
t
,
∆
⋅
1
2
λ
t
,
∆
⋅
2
1
λ
t
,
∆
⋅
1
4
λ
t
,
∆
⋅
−
1
4
1 λ
t
,
∆
⋅
−
1
3
1 λ
t
,
∆
⋅
−
1
2
1 λ
t
,
∆
⋅
−
1
5
1 λ
(
)
t
,
,
,
,
∆
⋅
+
+
+
−
5
1
4
1
3
1
2
1
1
λ
λ
λ
λ
Plik: Pojazd_Operator_Transportu_Paliw.doc opr. Adam Kadziński, Sławomir El
3
Model matematyczny pojazdu do transportu paliw płynnych
Przyjmuje się, że proces
{
}
0
:
)
(
≥
t
t
X
eksploatacji pojazdów do transportu paliw
płynnych jest procesem Markowa. Proces stochastyczny
{
}
0
:
)
(
≥
t
t
X
nazywamy
procesem Markowa, jeżeli dla dowolnego ciągu parametrów
n
n
t
t
...
t
t
<
<
<
<
−1
1
0
,
dowolnych
R
∈
<
<
<
<
−
n
n
x
x
...
x
x
1
1
0
oraz
,...
,
n
2
1
=
zachodzi równość
.
( )
( )
( )
( )
{
}
( )
( )
{
}
1
1
0
0
1
1
1
1
−
−
−
−
=
=
=
=
=
=
=
n
n
n
n
n
n
n
n
x
t
X
x
t
X
P
x
t
X
,
x
t
X
,...,
x
t
X
x
t
X
P
.
(1)
Równość ta oznacza, że bezpośredni wpływ na stan procesu w chwili t
n
ma jego
stan w chwili t
n-1
.
Dalej będą rozważane procesy Markowa o co najwyżej przeliczalnym zbiorze
stanów
{
}
5
4
3
2
1
,
,
,
,
=
S
i zbiorze parametrów czasowych
)
0
+∞
=< ,
T
.
Konsekwencją przyjętych założeń jest fakt, że sumaryczne czasy przebywania
pojazdu w i-tych stanach przed przejściem do j-tych stanów, opisują zmienne losowe o
rozkładach wykładniczych i funkcji gęstości prawdopodobieństwa postaci:
( )
t
j
,
i
j
,
i
j
,
i
t
f
⋅
−
⋅
=
λ
λ
e
,
{
}
5
4
3
2
1
,
,
,
,
j
,
i
∈
,
(2)
gdzie λ
i,j
są intensywnościami przejść ze stanów i-tych do stanów j-tych.
Wyznaczenie charakterystyk eksploatacyjnych pojazdu (wyznaczanych głównie
na podstawie prawdopodobieństw stanów modelu pojazdu) odwzorowywanego
zbudowanym tu modelem jest konsekwencją rozwiązania następującego równania:
(
) ( )
P
P
P
∆
⋅
=
∆
+
t
t
t
(3)
gdzie:
( )
t
P
− wektor prawdopodobieństw przebywania pojazdu w stanach w chwili t,
(
)
t
t
∆
+
P
− wektor prawdopodobieństw przebywania pojazdu w stanach w chwili (t+∆t),
P
∆
− macierz prawdopodobieństw przejść między stanami
S
P
∈
=
j
,
i
,
t
p
ij
)]
(
[
∆
Z przyjętych założeń i z rys. 1 wynika następująca postać macierzy
prawdopodobieństw przejść między stanami modelu pojazdu:
(
)
∆
⋅
−
∆
⋅
∆
⋅
−
∆
⋅
∆
⋅
−
∆
⋅
∆
⋅
−
∆
⋅
∆
⋅
∆
⋅
∆
⋅
∆
⋅
∆
⋅
+
+
+
−
=
t
t
t
t
t
t
t
t
t
t
t
t
t
,
,
,
,
,
,
,
,
,
,
,
,
,
,
,
,
1
5
1
5
1
4
1
4
1
3
1
3
1
2
1
2
5
1
4
1
3
1
2
1
5
1
4
1
3
1
2
1
1
0
0
0
0
1
0
0
0
0
1
0
0
0
0
1
1
∆
λ
λ
λ
λ
λ
λ
λ
λ
λ
λ
λ
λ
λ
λ
λ
λ
P
(4)
Zatem równanie (4.3) można zapisać w postaci:
[
] [
]
×
=
∆
+
∆
+
∆
+
∆
+
∆
+
)
(
P
),
(
P
),
(
P
),
(
P
),
(
P
)
(
P
),
(
P
),
(
P
),
(
P
),
(
P
5
4
3
2
1
5
4
3
2
1
t
t
t
t
t
t
t
t
t
t
t
t
t
t
t
(
)
∆
⋅
−
∆
⋅
∆
⋅
−
∆
⋅
∆
⋅
−
∆
⋅
∆
⋅
−
∆
⋅
∆
⋅
∆
⋅
∆
⋅
∆
⋅
∆
⋅
+
+
+
−
×
t
t
t
t
t
t
t
t
t
t
t
t
t
,
,
,
,
,
,
,
,
,
,
,
,
,
,
,
,
1
5
1
5
1
4
1
4
1
3
1
3
1
2
1
2
5
1
4
1
3
1
2
1
5
1
4
1
3
1
2
1
1
0
0
0
0
1
0
0
0
0
1
0
0
0
0
1
1
λ
λ
λ
λ
λ
λ
λ
λ
λ
λ
λ
λ
λ
λ
λ
λ
(5)
Plik: Pojazd_Operator_Transportu_Paliw.doc opr. Adam Kadziński, Sławomir El
4
lub równoważnie:
(
) ( )
(
)
( )
( )
+
∆
⋅
⋅
+
∆
⋅
⋅
+
∆
⋅
+
+
+
−
⋅
=
∆
+
t
t
t
t
t
t
t
t
,
,
1
3
3
1
2
2
1,5
1,4
1,3
1,2
1
1
P
P
]
[1
P
P
λ
λ
λ
λ
λ
λ
( )
( )
t
t
t
t
,
,
∆
⋅
⋅
+
∆
⋅
⋅
+
1
5
5
1
4
4
P
P
λ
λ
(
) ( )
( )
]
-
[1
P
P
P
1
2
2
2
1
1
2
t
t
t
t
t
t
,
,
∆
⋅
⋅
+
∆
⋅
⋅
=
∆
+
λ
λ
(
) ( )
( )
]
-
[1
P
P
P
1
3
3
3
1
1
3
t
t
t
t
t
t
,
,
∆
⋅
⋅
+
∆
⋅
⋅
=
∆
+
λ
λ
(6)
(
) ( )
( )
]
-
[1
P
P
P
1
4
4
4
1
1
4
t
t
t
t
t
t
,
,
∆
⋅
⋅
+
∆
⋅
⋅
=
∆
+
λ
λ
(
) ( )
( )
]
-
[1
P
P
P
1
5
5
5
1
1
5
t
t
t
t
t
t
,
,
∆
⋅
⋅
+
∆
⋅
⋅
=
∆
+
ζ
ζ
Po przekształceniu układu (6) otrzymujemy:
(
) ( )
( )
(
)
( )
( )
+
∆
⋅
⋅
+
∆
⋅
⋅
+
∆
⋅
+
+
+
⋅
−
=
−
∆
+
t
t
t
t
t
t
t
t
t
,
,
1
3
3
1
2
2
1,5
1,4
1,3
1,2
1
1
1
P
P
P
P
P
λ
λ
λ
λ
λ
λ
( )
( )
t
t
t
t
,
,
∆
⋅
⋅
+
∆
⋅
⋅
+
1
5
5
1
4
4
P
P
λ
λ
(
) ( ) ( )
( )
t
t
t
t
t
t
t
,
,
∆
⋅
⋅
−
∆
⋅
⋅
=
−
∆
+
1
2
2
2
1
1
2
2
P
P
P
P
λ
λ
(
) ( ) ( )
( )
t
t
t
t
t
t
t
,
,
∆
⋅
⋅
−
∆
⋅
⋅
=
−
∆
+
1
3
3
3
1
1
3
3
P
P
P
P
λ
λ
(7)
(
) ( ) ( )
( )
t
t
t
t
t
t
t
,
,
∆
⋅
⋅
−
∆
⋅
⋅
=
−
∆
+
1
4
4
4
1
1
4
4
P
P
P
P
λ
λ
(
) ( ) ( )
( )
t
t
t
t
t
t
t
,
,
∆
⋅
⋅
−
∆
⋅
⋅
=
−
∆
+
1
5
5
5
1
1
5
5
P
P
P
P
λ
λ
Następnie
(
) ( )
( )
(
)
( )
( )
+
⋅
+
⋅
+
+
+
+
⋅
−
=
∆
−
∆
+
1
3
3
1
2
2
1,5
1,4
1,3
1,2
1
1
1
P
P
P
P
P
,
,
t
t
t
t
t
t
t
λ
λ
λ
λ
λ
λ
( )
( )
1
5
5
1
4
4
P
P
,
,
t
t
λ
λ
⋅
+
⋅
(
) ( )
( )
( )
1
2
2
2
1
1
2
2
P
P
P
P
,
,
t
t
t
t
t
t
λ
λ
⋅
−
⋅
=
∆
−
∆
+
(
) ( )
( )
( )
1
3
3
3
1
1
3
3
P
P
P
P
,
,
t
t
t
t
t
t
λ
λ
⋅
−
⋅
=
∆
−
∆
+
(8)
(
) ( )
( )
( )
1
4
4
4
1
1
4
4
P
P
P
P
,
,
t
t
t
t
t
t
λ
λ
⋅
−
⋅
=
∆
−
∆
+
(
) ( )
( )
( )
1
5
5
5
1
1
5
5
P
P
P
P
,
,
t
t
t
t
t
t
λ
λ
⋅
−
⋅
=
∆
−
∆
+
Obliczając granicę po obu stronach równań układu można zapisać, że:
(
) ( )
( )
(
)
( )
( )
+
⋅
+
⋅
+
+
+
+
⋅
−
=
∆
−
∆
+
→
∆
1
3
3
1
2
2
1,5
1,4
1,3
1,2
1
1
1
0
P
P
P
P
P
lim
,
,
t
t
t
t
t
t
t
t
λ
λ
λ
λ
λ
λ
( )
( )
1
5
5
1
4
4
P
P
,
,
t
t
λ
λ
⋅
+
⋅
+
(
) ( ) ( )
( )
1
2
2
2
1
1
2
2
0
P
P
P
P
lim
,
,
t
t
t
t
t
t
t
λ
λ
⋅
−
⋅
=
∆
−
∆
+
→
∆
(
) ( ) ( )
( )
1
3
3
3
1
1
3
3
0
P
P
P
P
lim
,
,
t
t
t
t
t
t
t
λ
λ
⋅
−
⋅
=
∆
−
∆
+
→
∆
(
9)
(
) ( ) ( )
( )
1
4
4
4
1
1
4
4
0
P
P
P
P
lim
,
,
t
t
t
t
t
t
t
λ
λ
⋅
−
⋅
=
∆
−
∆
+
→
∆
(
) ( ) ( )
( )
1
5
5
5
1
1
5
5
0
P
P
P
P
lim
,
,
t
t
t
t
t
t
t
λ
λ
⋅
−
⋅
=
∆
−
∆
+
→
∆
Plik: Pojazd_Operator_Transportu_Paliw.doc opr. Adam Kadziński, Sławomir El
5
a gdy zauważy się, że:
(
) ( )
( )
t
t
t
t
t
t
i
i
i
t
d
dP
P
P
lim
0
=
∆
−
∆
+
→
∆
,
S
∈
i
dla
,
(10)
to
( )
( )
(
)
( )
( )
( )
( )
1
5
5
1
4
4
1
3
3
1
2
2
1,5
1,4
1,3
1,2
1
1
P
P
P
P
P
d
dP
,
,
,
,
t
t
t
t
t
t
t
λ
λ
λ
λ
λ
λ
λ
λ
⋅
+
⋅
+
⋅
+
⋅
+
+
+
+
⋅
−
=
( )
( )
( )
1
2
2
2
1
1
2
P
P
d
dP
,
,
t
t
t
t
λ
λ
⋅
−
⋅
=
( )
( )
( )
1
3
3
3
1
1
3
P
P
d
dP
,
,
t
t
t
t
λ
λ
⋅
−
⋅
=
(11)
( )
( )
( )
1
4
4
4
1
1
4
P
P
d
dP
,
,
t
t
t
t
λ
λ
⋅
−
⋅
=
( ) ( )
( )
1
5
5
5
1
1
5
P
P
d
dP
,
,
t
t
t
t
λ
λ
⋅
−
⋅
=
Układ (11) jest układem równań różniczkowych liniowych o stałych współczynnikach. W
warunkach ustalonych, tzn.
( )
0
d
dP
,
t
t
i
=
( )
S
∈
=
i
,
t
i
i
dla
P
P
,
(12)
układ ten przyjmuje postać następującą:
(
)
1
5
5
1
4
4
1
3
3
1
2
2
1,5
1,4
1,3
1,2
1
P
P
P
P
P
0
,
,
,
,
λ
λ
λ
λ
λ
λ
λ
λ
⋅
+
⋅
+
⋅
+
⋅
+
+
+
+
⋅
−
=
1
2
2
2
1
1
P
P
0
,
,
λ
λ
⋅
−
⋅
=
1
3
3
3
1
1
P
P
0
,
,
λ
λ
⋅
−
⋅
=
(13)
1
4
4
4
1
1
P
P
0
,
,
λ
λ
⋅
−
⋅
=
1
5
5
5
1
1
P
P
0
,
,
λ
λ
⋅
−
⋅
=
.
Z układu równań (13) wynikają następujące zależności:
1
1
2
2
1
2
P
P
⋅
=
,
,
λ
λ
1
1
3
3
1
3
P
P
⋅
=
,
,
λ
λ
(14)
1
1
4
4
1
4
P
P
⋅
=
,
,
λ
λ
1
1
5
5
1
5
P
P
⋅
=
,
,
λ
λ
.
Plik: Pojazd_Operator_Transportu_Paliw.doc opr. Adam Kadziński, Sławomir El
6
Ponieważ
5
4
3
2
1
P
P
P
P
P
1
+
+
+
+
=
,
(15)
więc po podstawieniu (15) otrzymujemy:
1
1
5
5
1
1
1
4
4
1
1
1
3
3
1
1
1
2
2
1
1
P
P
P
P
P
1
⋅
+
⋅
+
⋅
+
⋅
+
=
,
,
,
,
,
,
,
,
λ
λ
λ
λ
λ
λ
λ
λ
,
(16)
a prawdopodobieństwo przebywania pojazdu w poszczególnych stanach modelu można opisać
następującymi wzorami:
,
,
,
,
,
,
,
,
,
1
5
5
1
1
4
4
1
1
3
3
1
1
2
2
1
1
1
1
P
λ
λ
λ
λ
λ
λ
λ
λ
+
+
+
+
=
(17)
,
,
,
,
,
,
,
,
,
,
,
1
5
5
1
1
4
4
1
1
3
3
1
1
2
2
1
1
2
2
1
2
1
1
P
λ
λ
λ
λ
λ
λ
λ
λ
λ
λ
+
+
+
+
⋅
=
(18)
,
,
,
,
,
,
,
,
,
,
,
1
5
5
1
1
4
4
1
1
3
3
1
1
2
2
1
1
3
3
1
3
1
1
P
λ
λ
λ
λ
λ
λ
λ
λ
λ
λ
+
+
+
+
⋅
=
(19)
,
,
,
,
,
,
,
,
,
,
,
1
5
5
1
1
4
4
1
1
3
3
1
1
2
2
1
1
4
4
1
4
1
1
P
λ
λ
λ
λ
λ
λ
λ
λ
λ
λ
+
+
+
+
⋅
=
(20)
.
,
,
,
,
,
,
,
,
,
,
1
5
5
1
1
4
4
1
1
3
3
1
1
2
2
1
1
5
5
1
5
1
1
P
λ
λ
λ
λ
λ
λ
λ
λ
λ
λ
+
+
+
+
⋅
=
(21)
Uwzględniając to, że suma prawdopodobieństw przebywania pojazdu w stanach zdatności
(rys. 1) jest współczynnikiem gotowości pojazdu K
g
oraz suma prawdopodobieństw przebywania
pojazdu w stanach niezdatności (rys. 1) jest jego współczynnikiem niegotowości K
ng
,
otrzymujemy odpowiednio
1
5
5
1
1
4
4
1
1
3
3
1
1
2
2
1
1
1
1
P
,
,
,
,
,
,
,
,
g
K
λ
λ
λ
λ
λ
λ
λ
λ
+
+
+
+
=
=
,
(22)
1
5
5
1
1
4
4
1
1
3
3
1
1
2
2
1
1
5
5
1
1
4
4
1
1
3
3
1
1
2
2
1
5
4
3
2
1
1
P
P
P
P
,
,
,
,
,
,
,
,
,
,
,
,
,
,
,
,
ng
K
λ
λ
λ
λ
λ
λ
λ
λ
λ
λ
λ
λ
λ
λ
λ
λ
+
+
+
+
⋅
+
+
+
=
+
+
+
=
.
(23)
Plik: Pojazd_Operator_Transportu_Paliw.doc opr. Adam Kadziński, Sławomir El
7
Komputerowy model symulacyjny pojazdu do transportu paliw płynnych
Formuły matematyczne modelu pojazdu do transportu paliw oprogramowano w
symulatorze komputerowym WMM_5_0.xls. Symulator WMM_5_0.xls jest aplikacją
opracowaną w programie Microsoft Excel. Użytkownik symulatora ma do dyspozycji dwa
arkusze robocze: Mat_WMM_5_0 i Sym_WMM_5_0.
Arkusz roboczy Mat_WMM_5_0 spełnia funkcję pomocniczą. Umieszczono w nim graf
stanów modelu pojazdu oraz podstawowe formuły matematyczne modelu (rys. 2).
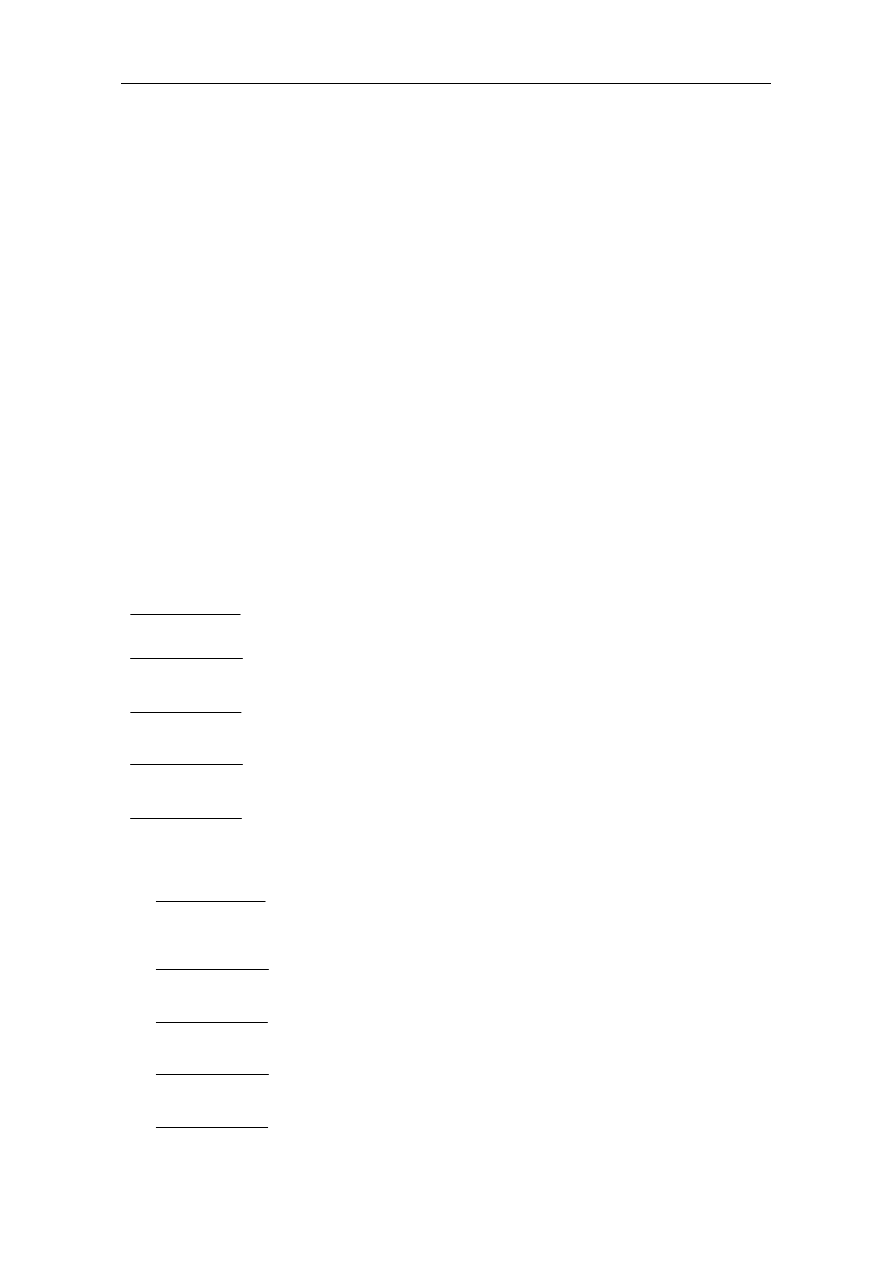
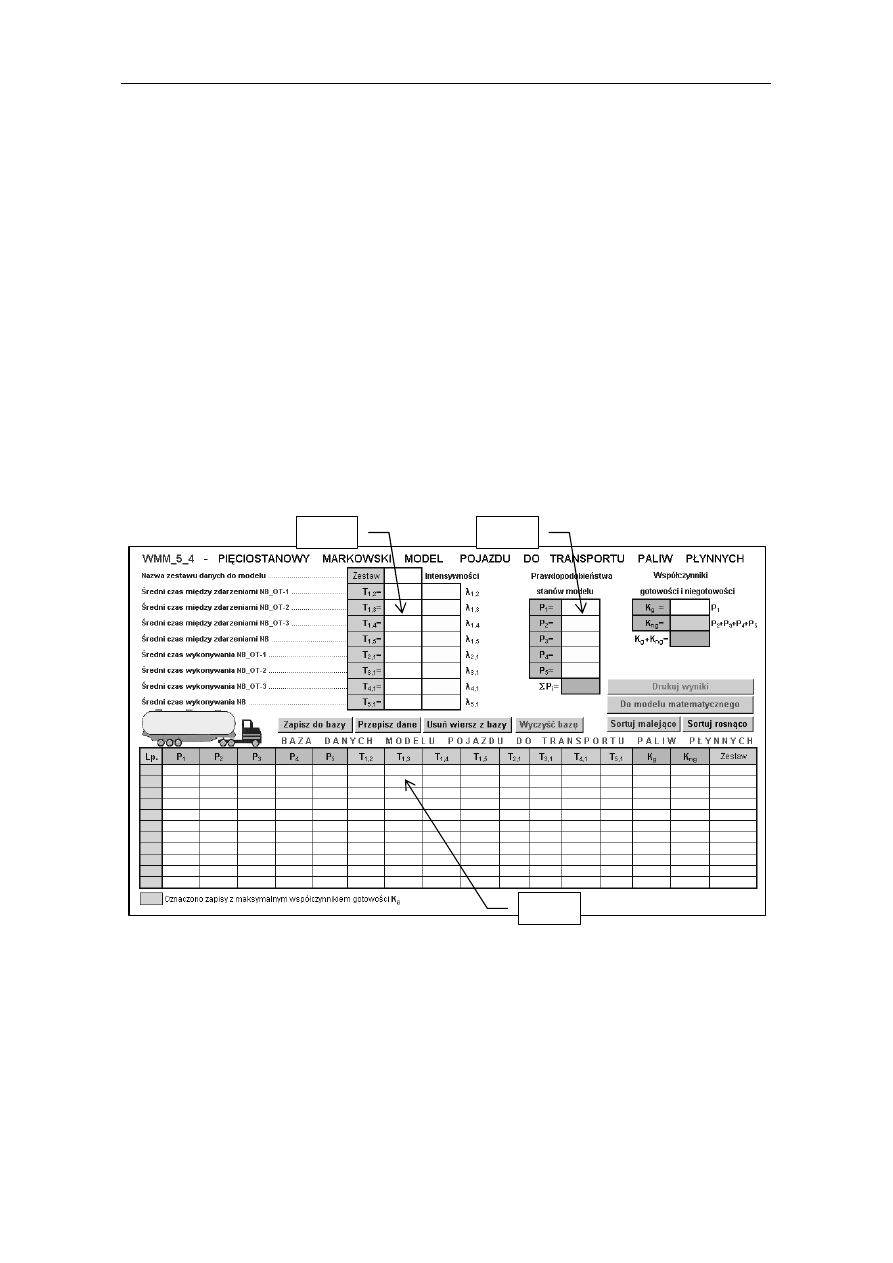
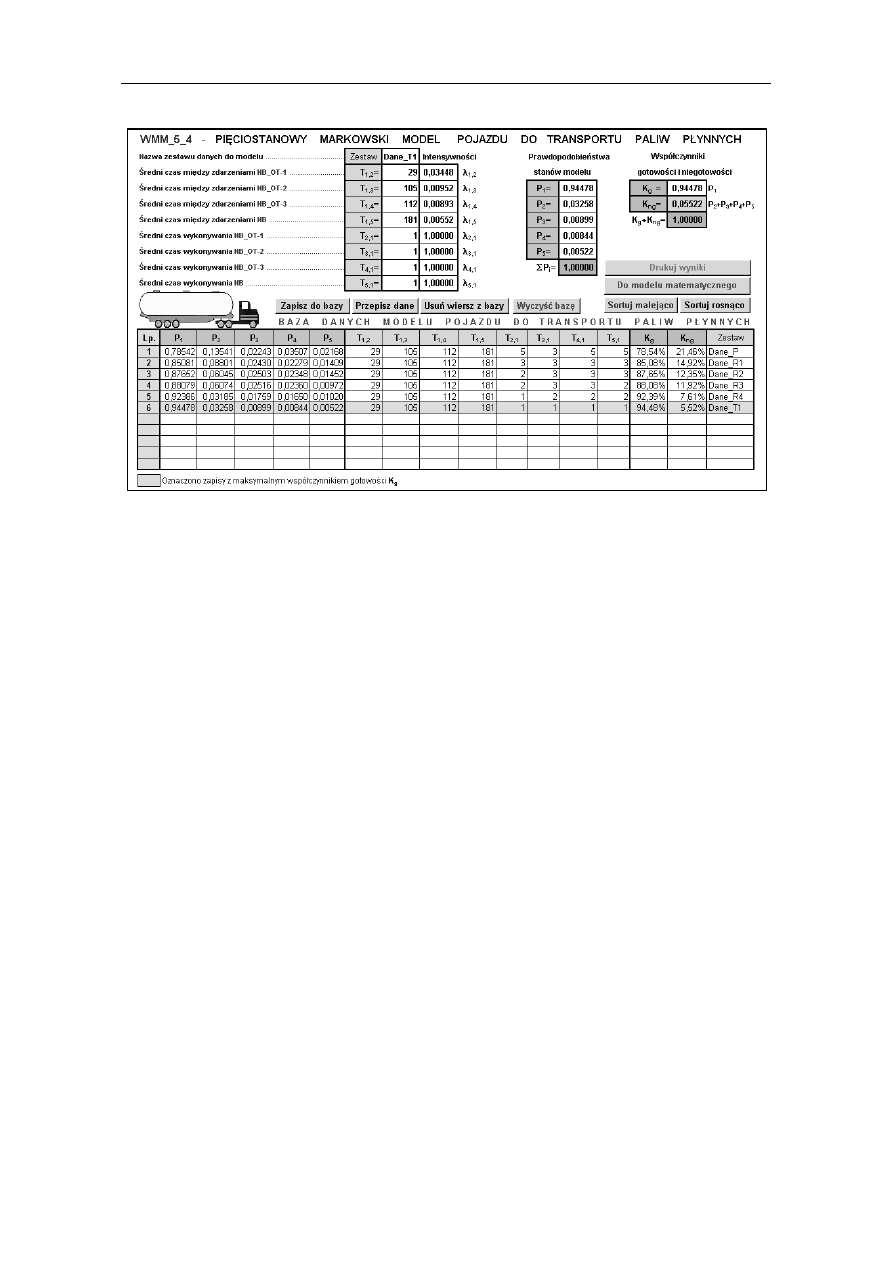
Arkusz roboczy Sym_WMM_5_0 jest arkuszem symulacyjnym (rys. 3). Można w nim
wskazać trzy następujące części:
−
formularz do wprowadzania danych wejściowych modelu (część 1),
−
zakres przedstawiający wyniki obliczeń dokonanych według formuł modelu
matematycznego (część 2),
−
tabela będąca bazą danych wejściowych i odpowiadających im wyników obliczeń
(część 3).
Rys. 3. Widok arkusza roboczego Sym_WMM_5_0 symulatora WMM_5_0.xls w fazie wyjściowej do
badań
Część 3
Część 1
Część 2

Plik: Pojazd_Operator_Transportu_Paliw.doc opr. Adam Kadziński, Sławomir El
8
W formularzu do wprowadzania danych wejściowych (początkowych) modelu
deklaruje się:
−
wartość średnią T
1,2
sumarycznych czasów t
1,2
pracy pojazdu między sąsiednimi
zdarzeniami rozpoczęcia obsługi okresowej pierwszej połączonej z naprawą
bieżącą (rozumianą inaczej jako wartość średnia sumarycznego czasu pobytu
pojazdu w stanie pierwszym modelu między sąsiednimi zdarzeniami przejścia z
tego stanu do stanu drugiego modelu); na rys. 3 tę daną wejściową opisano
−
Średni czas między zdarzeniami NB_OT-1;
−
wartość średnią T
1,3
sumarycznych czasów t
1,3
pracy pojazdu między sąsiednimi
zdarzeniami rozpoczęcia obsługi okresowej drugiej połączonej z naprawą bieżącą
(rozumianą inaczej jako wartość średnia sumarycznego czasu pobytu pojazdu w
stanie pierwszym modelu między sąsiednimi zdarzeniami przejścia z tego stanu
do stanu trzeciego modelu); na rys. 3 tę daną wejściową opisano
− Średni czas
między zdarzeniami NB_OT-2;
−
wartość średnią T
1,4
sumarycznych czasów t
1,4
pracy pojazdu między sąsiednimi
zdarzeniami rozpoczęcia obsługi okresowej trzeciej połączonej z naprawą bieżącą
(rozumianą inaczej jako wartość średnia sumarycznego czasu pobytu pojazdu w
stanie pierwszym modelu między sąsiednimi zdarzeniami przejścia z tego stanu
do stanu czwartego modelu); na rys. 3 tę daną wejściową opisano
− Średni czas
między zdarzeniami NB_OT-3;
−
wartość średnią T
1,5
sumarycznych czasów t
1,5
pracy pojazdu między sąsiednimi
zdarzeniami rozpoczęcia naprawy bieżącej (rozumianą inaczej jako wartość
średnia sumarycznego czasu pobytu pojazdu w stanie pierwszym modelu między
sąsiednimi zdarzeniami przejścia z tego stanu do stanu piątego modelu); na rys. 3
tę daną wejściową opisano
− Średni czas między zdarzeniami NB;
−
wartość średnią T
2,1
czasów t
2,1
wykonywania obsługi okresowej pierwszej
połączonej z naprawą bieżącą (rozumianą inaczej jako wartość średnia czasu
pobytu pojazdu w stanie drugim modelu przed przejściem z tego stanu do stanu
pierwszego modelu); na rys. 3
− Średni czas wykonywania NB_OT-1;
−
wartość średnią T
3,1
czasów t
3,1
wykonywania obsługi okresowej drugiej
połączonej z naprawą bieżącą (rozumianą inaczej jako wartość średnia czasu
pobytu pojazdu w stanie trzecim modelu przed przejściem z tego stanu do stanu
pierwszego modelu); na rys. 3
− Średni czas wykonywania NB_OT-2;
−
wartość średnią T
4,1
czasów t
4,1
wykonywania obsługi okresowej trzeciej
połączonej z naprawą bieżącą (rozumianą inaczej jako wartość średnia czasu
pobytu pojazdu w stanie czwartym modelu przed przejściem z tego stanu do stanu
pierwszego modelu); na rys. 3
− Średni czas wykonywania NB_OT-3;
−
wartość średnią T
5,1
czasów t
5,1
wykonywania naprawy bieżącej (rozumianą
inaczej jako wartość średnia czasu pobytu pojazdu w stanie piątym modelu przed
przejściem z tego stanu do stanu pierwszego modelu); na rys. 3
− Średni czas
wykonywania NB.
W symulatorze WMM_5_0.xls umieszczono specjalne procedury operacyjne.
Oprogramowanie wszystkich procedur operacyjnych zostało umieszczone w arkuszu
makr. W wersji użytkowej symulatora arkusz makr jest ukryty. Procedury operacyjne są
przypisane do specjalnych przycisków i nadane są im odpowiednie nazwy (rys. 3).
Plik: Pojazd_Operator_Transportu_Paliw.doc opr. Adam Kadziński, Sławomir El
9
Przykład zastosowania modeli do analizy gotowości pojazdów
Na podstawie analizy rzeczywistego systemu eksploatacji pojazdów do transportu paliw
płynnych oraz na podstawie przeprowadzenia procedury modelowania, zbudowano
markowski model matematyczny tych pojazdów i jego odwzorowanie komputerowe
WMM_5_0.xls. W specjalnie zbudowanej bazie danych BD_Y.xls zarejestrowano
przebieg procesu eksploatacji (od 1 stycznia 2000 do 31 grudnia 2001) zestawów
transportowych użytkowanych w dyspozytorni Y. Na podstawie informacji
zgromadzonych w tej bazie można wyznaczać wartości wielkości wejściowych do
modelu komputerowego.
•
Sformułowanie problemu badawczego
W dyspozytorni Y użytkowanych jest pięć zestawów transportowych
składających się z ciągnika siodłowego i naczepy cysternowej (Zestaw_CN_1,
Zestaw_CN_2, Zestaw_CN_3, Zestaw_CN_4 i Zestaw_CN_5). Niech eksploatację
zestawu transportowego opisują charakterystyki czasu zestawione w tabeli 1.
Na podstawie charakterystyk eksploatacyjnych zamieszczonych w tabeli 1
przygotowano zestaw danych wejściowych (początkowych) Dane_P do symulatora
komputerowego WMM_5_0.xls. Po wykonaniu obliczeń stwierdzono m.in., że
wynikający z danych Dane_P współczynnik gotowości zestawów transportowych
kształtuje się na poziomie K
g
=0,78 (tabela 2 i rys. 4) .
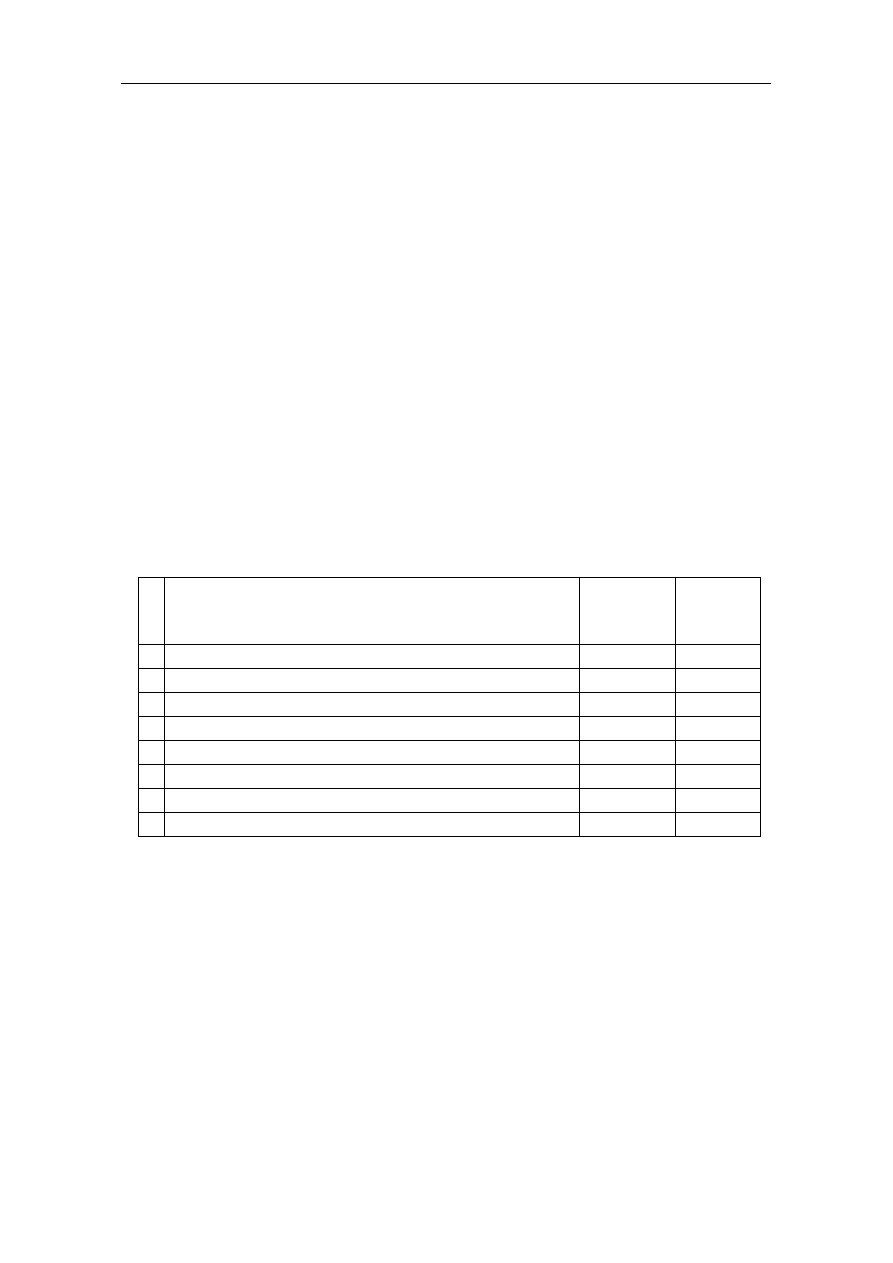
Tabela 1. Zestawienie charakterystyk eksploatacyjnych zestawu transportowego ciągnik siodłowy
z naczepą cysternową
Lp.
Opis charakterystyk eksploatacyjnych zestawów transportowych
umieszczonych jako dane wejściowe
w symulatorze komputerowym WMM_5_0 (rys. 3 − część 1)
Oznaczenie
danych
wejściowych
Wartości
danych
Dane_P
1. Średni czas między zdarzeniami NB_OT-1
T
1,2
[dni]
29
2. Średni czas między zdarzeniami NB_OT-2
T
1,3
[dni]
105
3. Średni czas między zdarzeniami NB_OT-3
T
1,4
[dni]
112
4. Średni czas między zdarzeniami NB
T
1,5
[dni]
181
5. Średni czas wykonywania NB_OT-1
T
2,1
[dni]
5
6. Średni czas wykonywania NB_OT-2
T
3,1
[dni]
3
7. Średni czas wykonywania NB_OT-3
T
4,1
[dni]
5
8. Średni czas wykonywania NB
T
5,1
[dni]
5
Źródło: badania własne
Należy rozważyć wdrożenie do eksploatacji zestawów transportowych
użytkowanych w dyspozytorni Y takich przedsięwzięć techniczno-organizacyjnych aby
współczynnik gotowości tych zestawów był nie mniejszy niż
K
g
=0,85.
Plik: Pojazd_Operator_Transportu_Paliw.doc opr. Adam Kadziński, Sławomir El
10
Rozwiązanie problemu badawczego
W celu rozwiązania postawionego problemu badawczego wykonano szereg
symulacji z uwzględnieniem różnych przedsięwzięć techniczno-organizacyjnych.
Niektóre z symulowanych przedsięwzięć pozwoliły osiągnąć współczynnik gotowości
zestawów transportowych na poziomie co najmniej K
g
=0,85. Zestawy danych opisujące
najbardziej realne z tych przedsięwzięć oznaczono odpowiednio: Dane_R1, Dane_R2,
Dane_R3, Dane_R4 (tabela 2 i rys. 4).
Sposób interpretacji tych przedsięwzięć
− przy założeniu, że realizacja zadań
transportowych odbywa się za pomocą tych samych zestawów transportowych (o tych
samych charakterystykach niezawodnościowych) i które są kierowane do obsługiwania
według dotychczasowych zasad
− jest następujący:
−
Dane_R1
− ograniczenie do 3 dni czasu pobytu zestawów transportowych w
stanach (wg rys. 1): NB_OT-1, NB_OT-2, NB_OT-3 i NB; pozwala to osiągnąć
współczynnik gotowości K
g
=0,85 (tabela 2 i rys. 4);
−
Dane_R2
− ograniczenie do 2 dni czasu pobytu zestawów transportowych w
stanie NB_OT-1 przy zachowaniu pozostałych warunków obsługi jak w
Dane_R1; pozwala to osiągnąć współczynnik gotowości K
g
=0,87 (tabela 2 i
rys. 4);
−
Dane_R3
− ograniczenie do 2 dni czasu pobytu zestawów transportowych w
stanie NB przy zachowaniu pozostałych warunków obsługi jak w Dane_R2;
pozwala to osiągnąć współczynnik gotowości K
g
=0,88 (tabela 2 i rys. 4);
−
Dane_R4
− ograniczenie do 1 dnia czasu pobytu zestawów transportowych w
stanie NB_OT-1 przy zachowaniu pozostałych warunków obsługi jak w
Dane_R3; pozwala to osiągnąć współczynnik gotowości K
g
=0,92 (tabela 2 i
rys. 4).
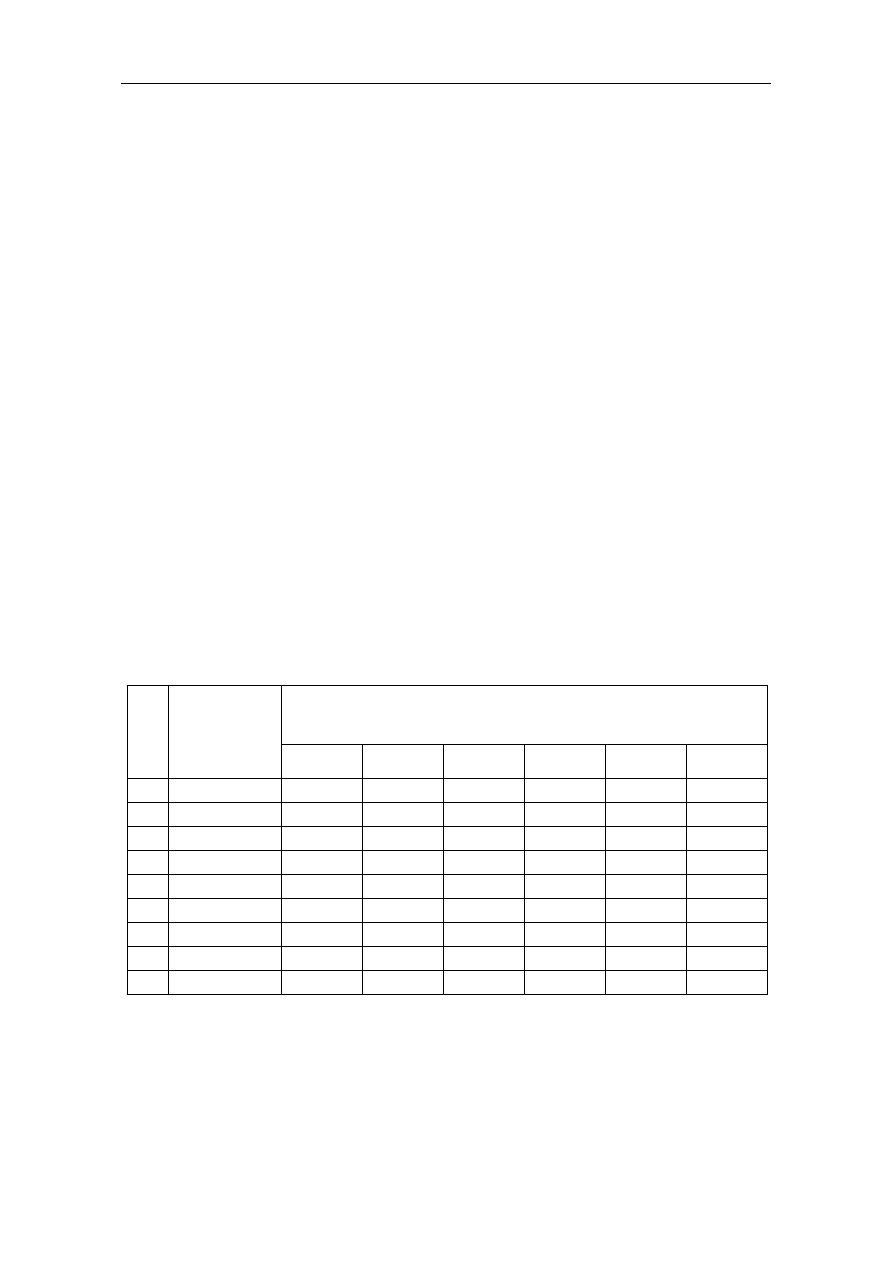
Tabela 2. Zestawienie danych i wybranych rozwiązań problemu badawczego
Wartości danych wejściowych i wyniki obliczeń współczynnika
gotowości dla rozpatrywanych zestawów rozwiązań
techniczno−organizacyjnych
Lp.
Oznaczenie
danych
wejściowych
i współczynnika
gotowości
Dane_P
Dane_R1
Dane_R2
Dane_R3
Dane_R4
Dane_T1
1.
T
1,2
[dni]
29
29
29
29
29
29
2.
T
1,3
[dni]
105
105
105
105
105
105
3.
T
1,4
[dni]
112
112
112
112
112
112
4.
T
1,5
[dni]
181
181
181
181
181
181
5.
T
2,1
[dni]
5
3
2
2
1
1
6.
T
3,1
[dni]
3
3
3
3
2
1
7.
T
4,1
[dni]
5
3
3
3
2
1
8.
T
5,1
[dni]
5
3
3
2
2
1
9.
K
g
[−]
0,78
0,85
0,87
0,88
0,92
0,94
Źródło: badania własne
Plik: Pojazd_Operator_Transportu_Paliw.doc opr. Adam Kadziński, Sławomir El
11
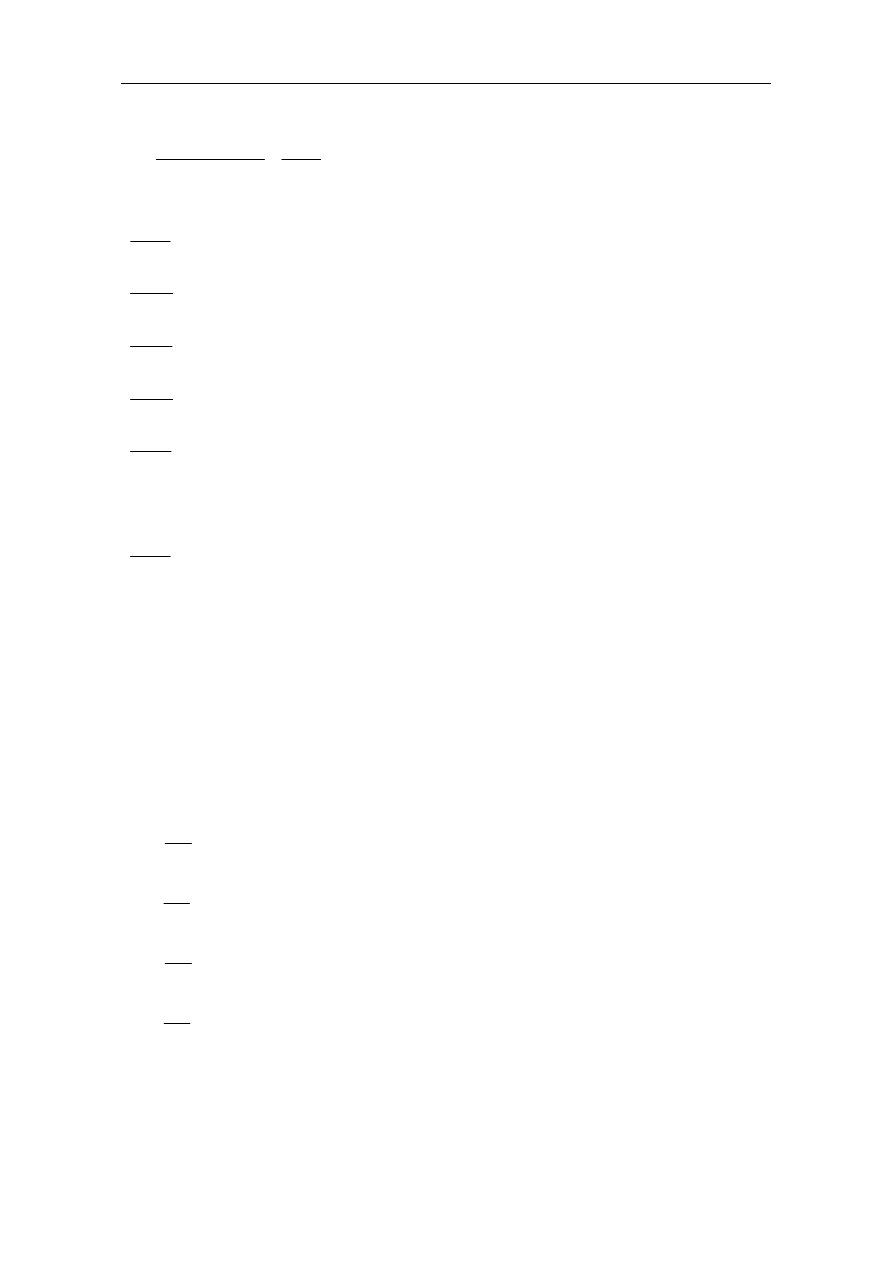
Rys. 4. Widok arkusza roboczego Sym_WMM_5_0 symulatora WMM_5_0.xls w z wynikami badań
Przy identycznych założeniach można teoretycznie przyjąć, że minimalny czas
pobytu zestawów transportowych w stanach NB_OT-1, NB_OT-2, NB_OT-3 i NB
może być jednodniowy. Po przygotowaniu stosownego zestawu danych (Dane_T1) i
dokonaniu obliczeń stwierdzono, że takie przedsięwzięcie zapewniłoby współczynnik
gotowości K
g
=0,94 (tabela 2 i rys. 4). Wynik ten ma przede wszystkim walor
poznawczy. Warto tu jednak zaznaczyć, że takie parametry pracy służb serwisowych
−
ze względów technicznych i organizacyjnych
− nie są możliwe. Z tego względu dalsze
realne możliwości zwiększenia współczynnika gotowości zestawów transportowych
wiązać się mogą jedynie z podjęciem przedsięwzięć technicznych zwiększających
niezawodność pojazdów np. prowadzących do ograniczenia lub całkowitego
wyeliminowania z ich eksploatacji stanów NB.
Warunki eksploatacji zestawów transportowych odwzorowane w Dane_R1,
Dane_R2, Dane_R3, Dane_R4 pozwalają spełnił warunek K
g
≥0,85. Według autora
niniejszej pracy można je uznać za możliwe do spełnienia. Konieczne jest jednak
usprawnienie organizacji pracy serwisu Południe polegające na ograniczenia czasu
wykonywania obsług technicznych i napraw bieżących zestawów transportowych.

Plik: Pojazd_Operator_Transportu_Paliw.doc opr. Adam Kadziński, Sławomir El
12
Podsumowanie
W opracowaniu przeprowadzono analizę procesu eksploatacji pojazdów do transportu
paliw płynnych użytkowanych w jednej z dyspozytorni paliwowej spółki transportowej.
Dokonano prezentacji wybranego do analizy systemu operatora transportowego przez:
wskazanie na obszar jego działania, przedstawienie pojazdów do transportu paliw
płynnych eksploatowane w systemie i opis realizowanych przez nie zadań.
Punktem wyjścia prowadzonych analiz stał się zarejestrowany w bazie danych
przebieg procesu eksploatacji pojazdów do transportu paliw płynnych. Na tej podstawie
zidentyfikowano stany eksploatacyjne pojazdów i możliwości zmian tych stanów.
Pozwoliło to na stworzenie i rozwiązanie wielostanowego matematycznego modelu
pojazdu do transportu paliw płynnych. Model matematyczny odwzorowano w
komputerowym modelu symulacyjnym o nazwie WMM_5_0.Xls.
W części aplikacyjnej opracowania sformułowano i rozwiązano przykładowy
problem badawczy. W ramach tego przykładu dokonano badań symulacyjnych kilku
zestawów
rozwiązań
techniczno-organizacyjnych
pozwalających
zwiększyć
współczynnik gotowości pojazdów użytkowanych w przykładowej dyspozytorni spółki
transportowej świadczącej w Polsce usługi m.in. na rzecz koncernów paliwowych.
Wyszukiwarka
Podobne podstrony:
4 1 Dla TR Sem3 Autobus Analiza Gotowosci
1 1 Dla TR Sem3 Karta opisu Niezawodnosc obiektow tech 2007 v1
1 0 Dla TR Sem3 NOT Wprowadzenie v1id 8821
3 0 Dla TR Sem3 NOT Niezawodnosc strukturalna v1
1 1 Dla TR Sem3 Karta opisu Niezawodnosc obiektow tech 2007 v1
1 0 Dla TR Sem3 NOT Wprowadzenie v1
3 1 Dla TR Sem3 Elementy Niezaw Nieznany
4 0 Dla TR Sem3 NOT Obiekty odnawiane v1
2 0 Dla TR Sem3 Obiekty nieodnawiane charakterystyki niezawodnosci OT v1
3 0 Dla TR Sem3 NOT Niezawodnosc strukturalna v1
więcej podobnych podstron