
1. Część teoretyczna
1.1. Ogólna charakterystyka maszyn elektrycznych
Maszyny elektryczne prądu zmiennego można ogólnie podzielić na jednofazowe i trójfazowe silniki,
prądnice i transformatory. Silnik to maszyna przetwarzająca energię elektryczną w mechaniczną. Prądnica to
maszyna przetwarzająca energię mechaniczną w elektryczną. Transformator to maszyna służąca do zmiany
wartości napięcia elektrycznego za pośrednictwem zmiennego pola magnetycznego, wykorzystująca
zjawisko indukcji elektromagnetycznej. Działanie silnika oparte jest na zjawisku oddziaływania siły
mechanicznej na przewodnik przewodzący prąd i umieszczony w polu magnetycznym. W silniku
indukcyjnym siła mechaniczna działa na prąd indukowany w uzwojeniu twornika pod wpływem wirującego
pola magnetycznego wytworzonego przez uzwojenie wzbudzenia. Działanie prądnicy oparte jest na
indukowaniu napięcia w przewodniku poruszającym się w polu magnetycznym lub w przewodniku
nieruchomym, który jest obejmowany przez zmienne w czasie pole magnetyczne. Źródłem pola
magnetycznego w maszynach są magnesy trwałe lub uzwojenia nawinięte na rdzeniach magnetycznych i
przewodzące prąd. Rdzenie maszyn prądu zmiennego wykonywane są najczęściej w postaci pakietowanej
(warstwy blachy przedzielone izolatorem) ponieważ zmienny strumień magnetyczny indukuje w rdzeniu
tzw. prądy wirowe, zwiększając jego temperaturę. Podstawowe uzwojenia w maszynach wirujących prądu
zmiennego nazywane są uzwojeniem wzbudzenia i uzwojeniem twornika. Pierwsze z nich jest źródłem pola
magnetycznego, natomiast w drugim indukuje się (tworzy) napięcie oraz działa siła mechaniczna na płynący
przez nie prąd. Uzwojenia transformatora określa się jako pierwotne i wtórne. Wśród maszyn wirujących
prądu zmiennego wprowadza się podział na:
- silniki asynchroniczne (indukcyjne) (1-fazowe (klatkowe) i 3-fazowe (klatkowe i pierścieniowe))
- prądnice synchroniczne 3-fazowe
- silniki synchroniczne 1-fazowe i 3-fazowe
- silniki komutatorowe szeregowe 1-fazowe
Wirniki silników asynchronicznych obracają się z prędkością mniejszą od prędkości wirującego pola
magnetycznego, a wirniki silników synchronicznych wirują z prędkością równą prędkości pola
magnetycznego. Wirniki silników komutatorowych osiągają większe prędkości obrotowe od rotorów
silników indukcyjnych i synchronicznych. Maszyny z komutatorem posiadają także większy moment
rozruchowy.
1.2. Budowa i zasada działania silnika indukcyjnego
Przemienny prąd w symetrycznym trójfazowym uzwojeniu stojana silnika powoduje powstanie
zmiennego pola magnetycznego dla każdej z faz, w wyniku czego wypadkowe pole maszyny jest wirujące.
Pole takie powoduje indukcję napięcia w uzwojeniach wirnika i przepływ prądu.
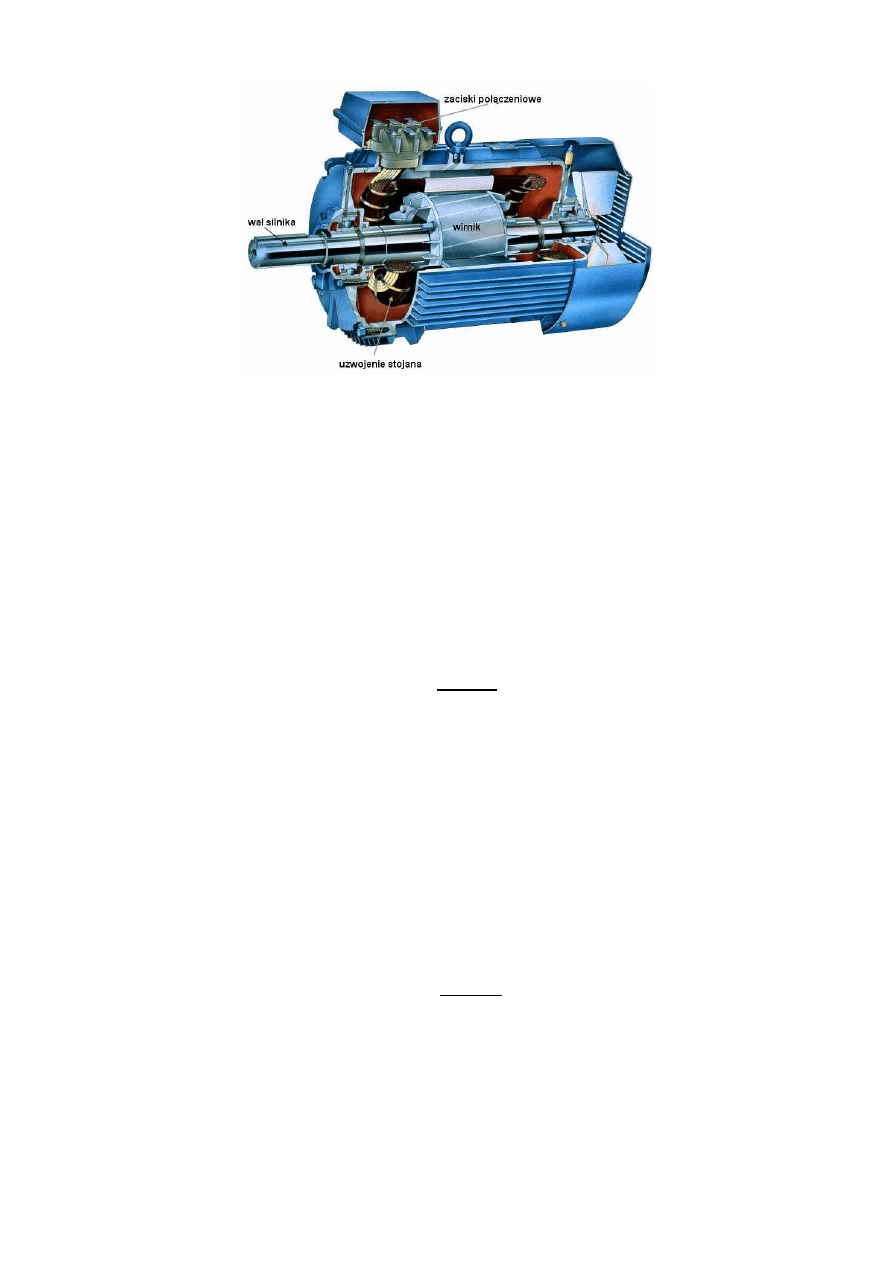
2
Rys. 1.1. Przekrój silnika indukcyjnego klatkowego
Oddziaływanie pól magnetycznych stojana i wirnika wywołuje powstanie
elektromagnetycznego i ruch obrotowy wirnika. Inaczej interpretując to zjawisko można stwierdzić, że
wirujące pole magnetyczne stojana działa siłą na prąd wirnika, który został wywołany (zaindukowany) przez
to pole. Siła elektromotoryczna (napięcie) w uzwojeniach wirnika powstaje gdy wirnik obraca się z
prędkością inną niż prędkość wirowania pola magnetycznego (maszyna asynchroniczna). Gdyby prędkość
wirnika osiągnęła prędkość pola, wówczas pole magnetyczne byłoby nieruchome względem uzwojeń
wirnika i nie mogłoby zaindukować w nim napięcia elektrycznego. Prędkość wirującego pola
magnetycznego jest nazywana prędkością synchroniczną:
p
f
60
n
s
[obr/min] (1.1)
gdzie:
f – częstotliwość prądu [Hz]
p – liczba par biegunów magnetycznych w maszynie
W typowych silnikach przy obciążeniu znamionowym prędkość wirnika jest około 2 – 4 % mniejsza niż
prędkość wirowania pola magnetycznego. Występuje tak zwany poślizg. Silnik asynchroniczny bez
obciążenia uzyskuje prędkość obrotową prawie równą prędkości synchronicznej (poślizg jest mniejszy niż 1
%). Poślizg w maszynie indukcyjnej wyraża się zależnością:
s
s
n
n
n
s
(1.2)
gdzie:
n – prędkość obrotowa wirnika maszyny
Efekt wirowania pola jest uzyskiwany naturalnie w uzwojeniach trójfazowych stojana natomiast w
silnikach jednofazowych konstruuje się układy uzwojeń, w których płyną prądy przesunięte względem siebie
w fazie. Można to uzyskać przez wprowadzenie do jednej fazy uzwojenia kondensatora lub zastosowanie

3
dodatkowego uzwojenia zwartego. Prędkość wirowania silnika zależy od prędkości wirowania pola stojana.
Prędkość wirowania pola stojana zależy od częstotliwości napięcia zasilania oraz od konstrukcji uzwojeń
(tzw. liczby par biegunów). Uzwojenia wirnika mogą być wewnętrznie połączone (silnik zwarty) lub ich
końcówki są przyłączone do pierścieni ślizgowych, przewodzących prąd za pośrednictwem szczotek do
zewnętrznych impedancji (silnik pierścieniowy). Szczególnym przypadkiem silnika zwartego (obecnie
głównie takie są produkowane) jest silnik klatkowy. Rdzeń wirnika w takim silniku ma kształt klatki
zbudowanej z aluminiowych lub mosiężnych pierścieni połączonych prętami (rys. 1.2). Silnik klatkowy
posiada dużą trwałość i prostą budowę (małe koszty produkcji).
Elementami ulegającymi największemu zużyciu są łożyska. Jego wadą jest trudny rozruch (przy dużym
obciążeniu silnik może nie uzyskać momentu rozruchowego, natomiast przy niewielkim lub braku
obciążenia uruchamia się bardzo gwałtownie. W sieci energetycznej w Polsce prąd elektryczny ma
częstotliwość 50 Hz, co odpowiada prędkości synchronicznej 3000 obr/min, a prędkość znamionowa silnika
asynchronicznego wynosi 2800-2900 obr/min. Największymi wadami silnika indukcyjnego są brak
bezpośredniej możliwości regulacji prędkości obrotowej oraz gwałtowny rozruch (silniki klatkowe). Wraz z
rozwojem elektroniki, a w szczególności tranzystorów mocy, triaków i mikroprocesorów, zaczęto stosować
układy łagodnego rozruchu (soft start) oraz regulować prędkość obrotową za pomocą przemienników
częstotliwości (falowników). Rozwój technologiczny i spadek kosztów produkcji układów falownikowych są
przyczyną coraz częstszego stosowania tego typu urządzeń do sterowania silnikami klatkowymi.
1.3. Budowa i zasada działania silnika komutatorowego
Silnik komutatorowy jednofazowy zbudowany jest podobnie i działa analogicznie jak komutatorowy
silnik szeregowy prądu stałego Silnik szeregowy może być, jako jedyny silnik prądu stałego, zasilany
również prądem przemiennym. Silniki takie nazwane są też uniwersalnymi. Możliwość ich różnego zasilania
wynika z faktu, że kierunek wirowania wirnika nie zależy od biegunowości przyłożonego napięcia. W
przypadku gdy silnik ma być zasilany prądem stałym, stojan wykonywany jest z litego materiału, natomiast
przy zasilaniu prądem przemiennym wykonuje się go z pakietu izolowanych blach, zmniejszając straty
energii powstałe na skutek indukowania się prądów wirowych. Ze względu na stosunkowo małe wymiary i
dużą moc oraz znaczne prędkości obrotowe, silniki te znalazły liczne zastosowania w urządzeniach
gospodarstwa domowego (odkurzacze, elektronarzędzia, suszarki, sokowirówki, miksery itp.).
1.4. Zastosowanie maszyn wirujących prądu zmiennego
Silniki indukcyjne trójfazowe stosowane są powszechnie w przemyśle, rolnictwie i trakcji elektrycznej
(pojazdy szynowe i trolejbusy). W tej grupie wyróżnia się silniki pierścieniowe i klatkowe. Te drugie są
często i chętnie stosowane ze względu na prostotę konstrukcji i mniejszy koszt produkcji. Silniki indukcyjne
jednofazowe klatkowe są stosowane najczęściej w przemyśle oraz w gospodarstwie domowym (pralki,
lodówki). Silniki komutatorowe szeregowe jednofazowe są stosowane w urządzeniach powszechnie
wykorzystywanych w gospodarstwie domowym (odkurzacze, roboty kuchenne, młynki, wiertarki, szlifierki).
Silniki synchroniczne stosowane są tam, gdzie wymagana jest stabilna prędkość obrotowa, w praktyce
4
m
2
2
z
f
44
,
4
E
wykorzystywane są rzadko ponieważ nie posiadają własnego momentu rozruchowego. Prądnice
synchroniczne trójfazowe stosowane są jako generatory energii elektrycznej w elektrowniach oraz, w
specjalnym wykonaniu, jako prądnice samochodowe (alternatory).
1.5. Budowa i zasada działania transformatora
Transformator jest to urządzenie elektromagnetyczne, nie zawierające części ruchomych, służące do
zmiany wartości napięcia elektrycznego, a tym samym natężenia prądu, przy stałej częstotliwości.
Zasadnicze elementy transformatora to rdzeń magnetyczny oraz umieszczone na jego kolumnie (kolumnach)
uzwojenia pierwotne i wtórne. Rdzeń stanowi obwód magnetyczny, jego części łączące kolumny to jarzma, a
przestrzeń zawarta między kolumną a jarzmem nazywa się oknem. Rdzeń jest wykonany w postaci pakietu
blach odizolowanych od siebie, co zmniejsza straty mocy powstające w postaci ciepła w wyniku
indukowania się w rdzeniu prądów wirowych. Blachy pokrywa się cienką warstwą materiału izolacyjnego
(np. papieru, lakieru, szkła wodnego) i składa w pakiety. Do stali, z której są wykonane blachy, dodaje się
ok. 4 % krzemu w celu zmniejszenia strat mocy występujących z powodu przemagnesowywania rdzenia
(straty histerezowe) i indukcji prądów wirowych.
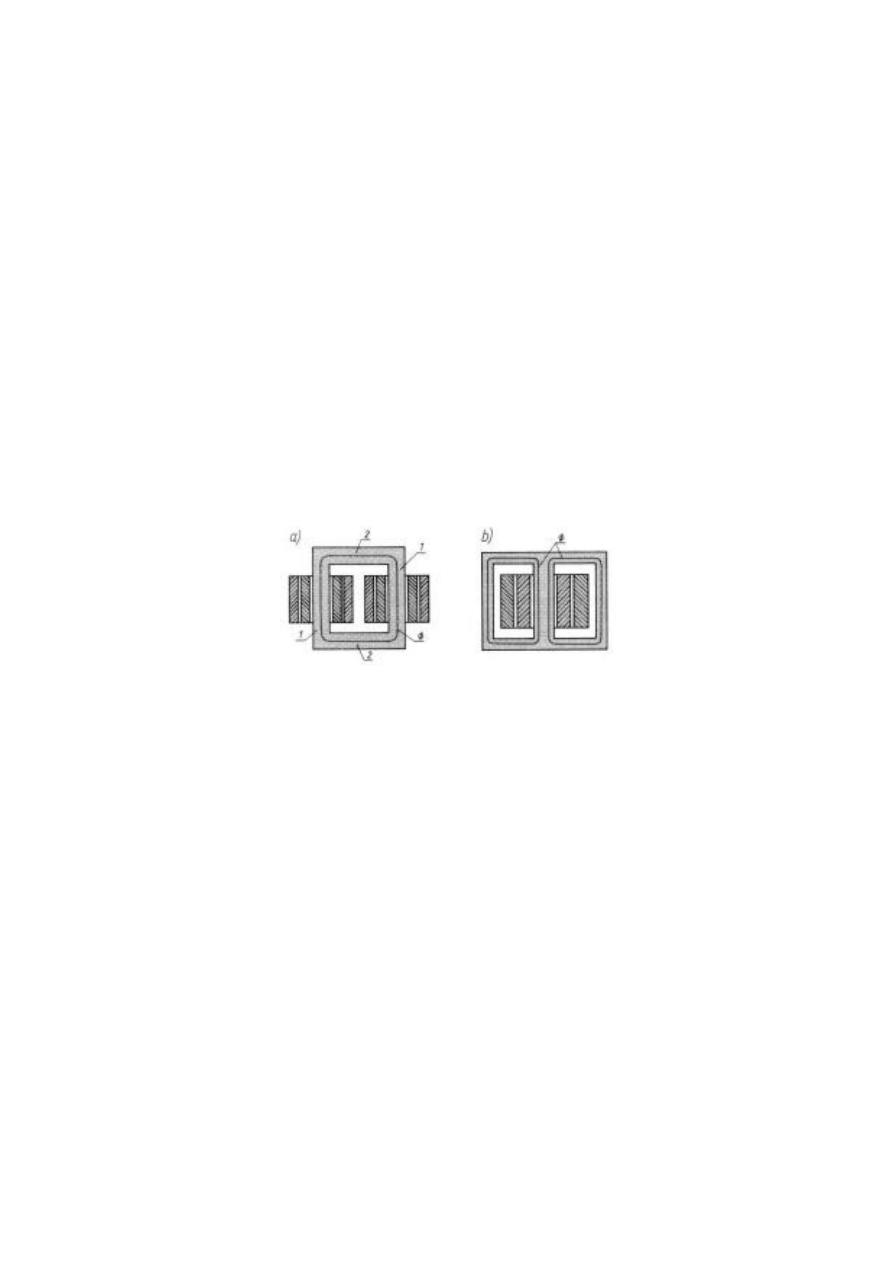
Rys. 1.2. Budowa transformatora jednofazowego: a) rdzeniowego, b) płaszczowego
1- kolumny, 2- jarzma
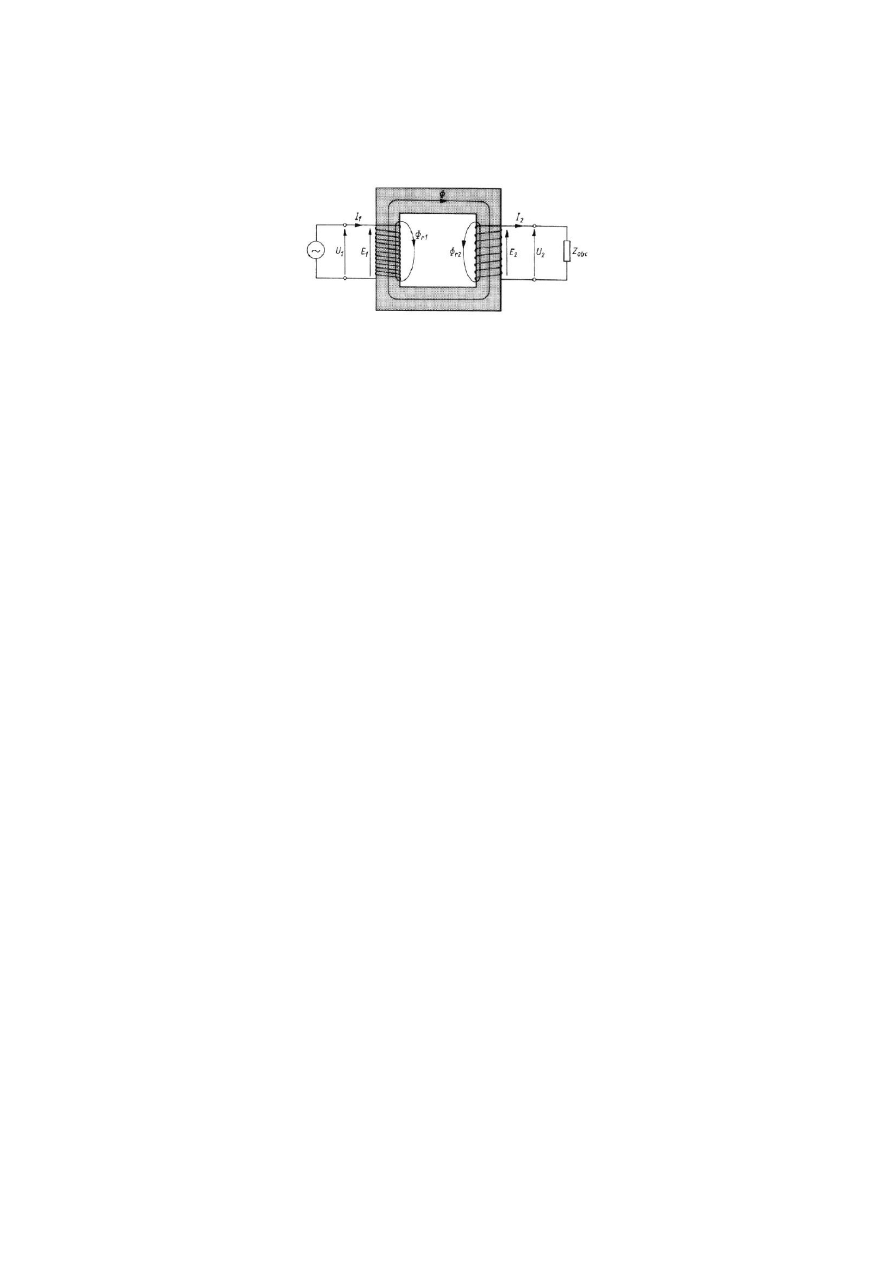
Zasada działania transformatora jest oparta na zjawisku indukcji elektromagnetycznej wzajemnej. Pod
wpływem przyłożonego napięcia przemiennego w uzwojeniu pierwotnym płynie prąd, który wytwarza
przemienny strumień magnetyczny, indukujący w uzwojeniu pierwotnym i wtórnym siły elektromotoryczne
(skuteczne) E
1
i E
2
:
(1.1)
gdzie:
f - częstotliwość napięcia i prądu
z
1
, z
2
- liczba zwojów uzwojeń pierwotnego i wtórnego
Φ
m
– amplituda głównego strumienia magnetycznego (wartość maksymalna)
m
1
1
z
f
44
,
4
E
5
Z zależności 1.1 wynika, że stosunek sił elektromotorycznych indukowanych w uzwojeniach
transformatora jest równy stosunkowi liczby ich zwojów i jest nazywany przekładnią napięciową lub
zwojową transformatora:
(1.2)
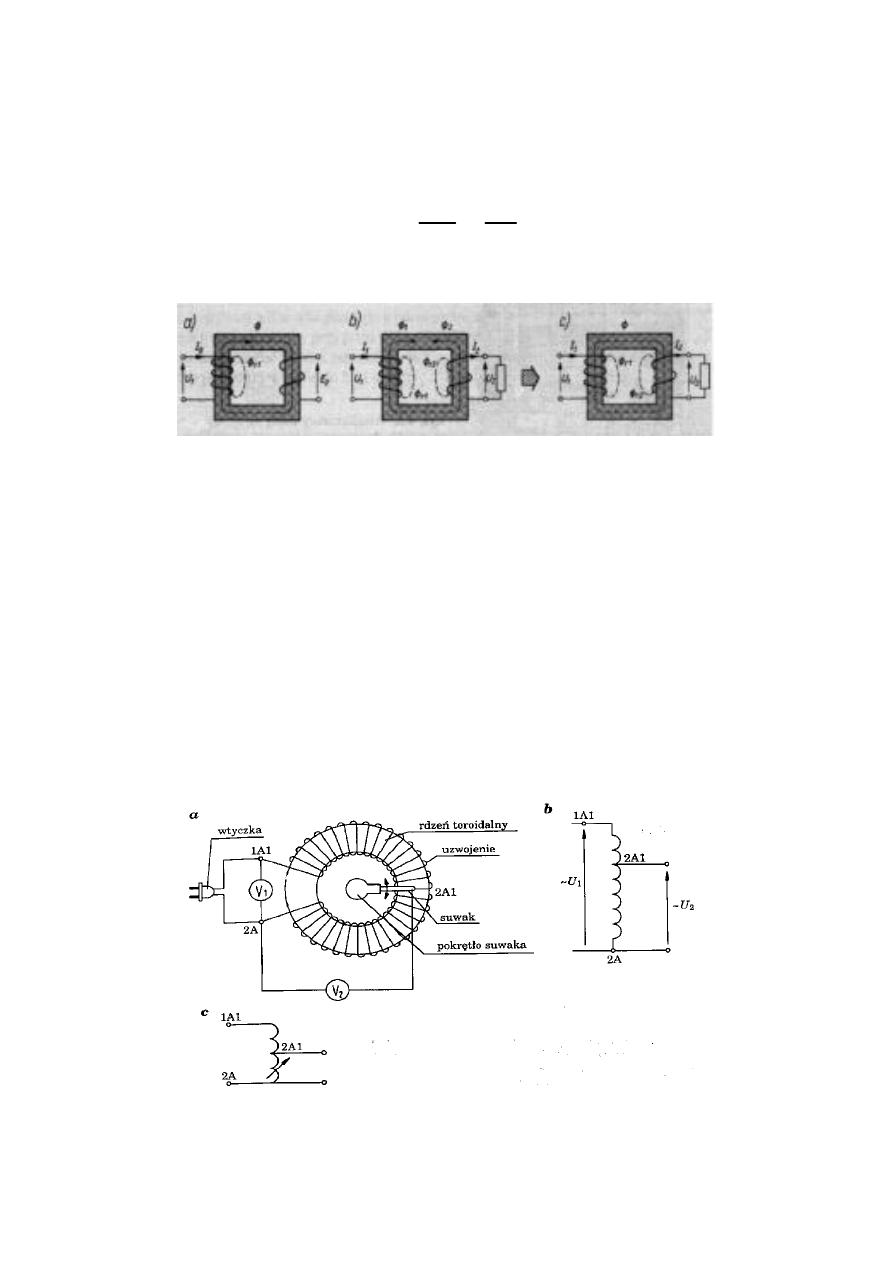
Rys. 1.3. Zasada działania transformatora
Szczególnym przypadkiem transformatora jest autotransformator, służący do płynnej regulacji napięcia
przemiennego w laboratoriach. Występuje w nim tylko jedno uzwojenie, przy czym część tego uzwojenia
jest wspólna dla strony pierwotnej i wtórnej. Zasadę działania autotransformatora przedstawiono na rysunku
1.4. Uzwojenie jest nawinięte na stalowy rdzeń, najczęściej o kształcie toroidalnym. Po odizolowanej jego
części ślizga się suwak, którego położenie nastawia się pokrętłem. Przy położeniu suwaka w pozycji 2A
napięcie wyjściowe U2 wynosi zero.
Zmieniając liczbę zwojów zawartych między 2A i suwakiem, można zmieniać wartość nastawianego
napięcia od zera do wartości napięcia zasilającego Uv lub większej, wtedy gdy napięcie zasilające jest
przyłączone do mniejszej liczby zwojów od ich całkowitej ilości.
Rys. 1.4. Autotransformator jednofazowy regulacyjny a) szkic konstrukcyjny, b) schemat, c)symbol
2
1
2
1
z
z
E
E
6
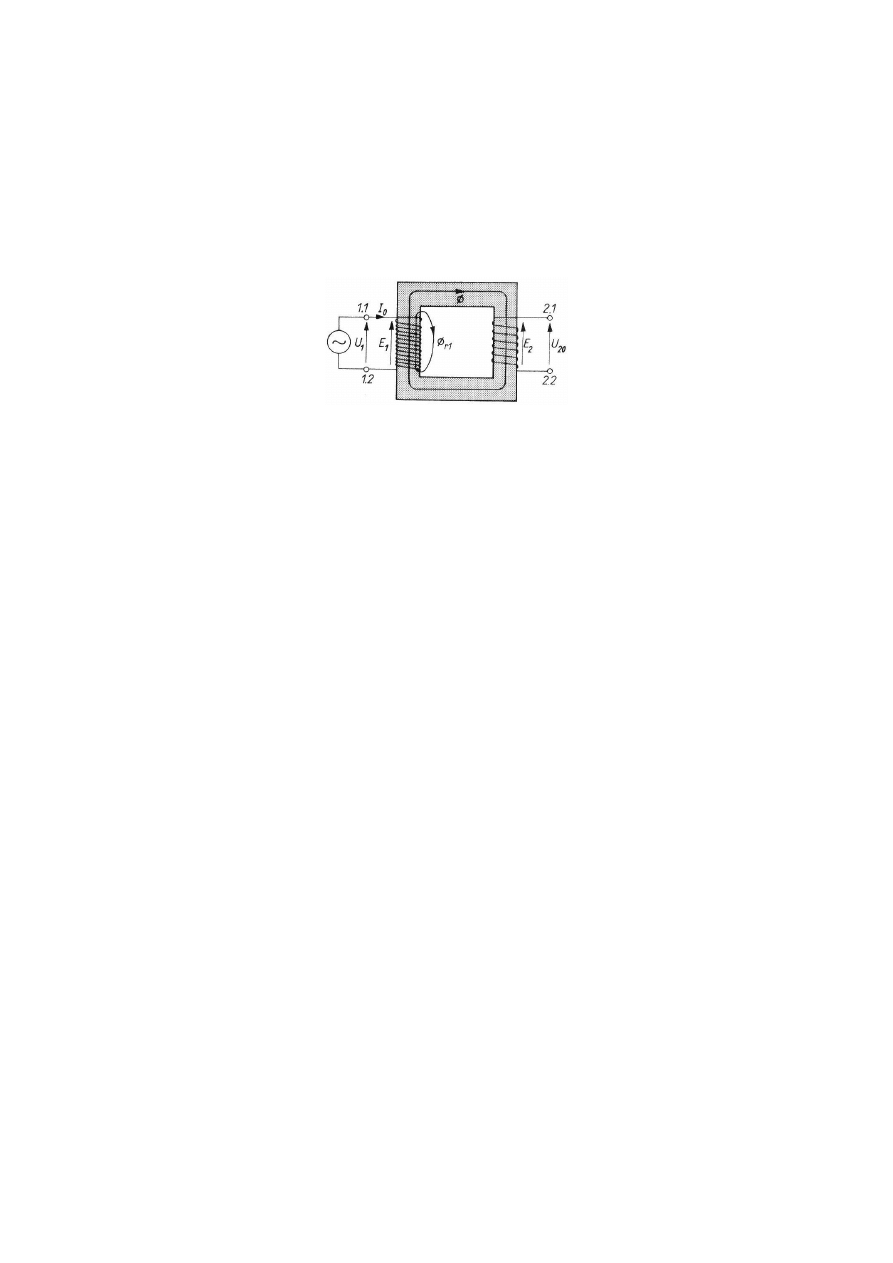
1.6. Stany pracy transformatora
Transformator może pracować w stanach jałowym, zwarcia i obciążenia. Próbę stanu jałowego
wykonuje się w ten sposób, że do jednego z uzwojeń (pierwotnego lub wtórnego) doprowadza się
regulowane napięcie przemienne, natomiast drugie pozostaje rozwarte.
Rys. 1.5. Stan jałowy transformatora
Z próby stanu jałowego można wyznaczyć takie parametry transformatora jak straty w żelazie ∆P
Fe
,
prąd stanu jałowego I
0
oraz jego składowe czynną I
ocz
i bierną I
µ
, przekładnię υ, współczynnik mocy cosφ
0
.
Straty mocy czynnej w stanie pracy jałowej ∆P
0
, które mierzy się watomierzem, są równe sumie strat w
żelazie i strat w miedzi uzwojeń strony zasilanej.
Ze względu na małą, w porównaniu z prądem znamionowym, wartość prądu I
0,
straty ∆P
Cuo
są
pomijalnie małe względem strat ∆P
Fe
i dlatego przyjmuje się, że ∆P
0
=∆P
Fe
.
Straty te mierzone są przy znamionowym napięciu zasilającym. Straty mocy w żelazie wynikają z
przemagnesowywania rdzenia przy zmianie zwrotu strumienia (grupa strat histerezowych ∆P
Feh
) oraz
indukowania prądów wirowych w blachach rdzenia (grupa strat na prądy wirowe ∆P
Feω;
). Prąd stanu
jałowego I
0
, przy zmianach napięcia od zera do wartości znamionowej zmienia się w przybliżeniu liniowo.
Przy napięciach wyższych od znamionowego następuje zakrzywienie charakterystyki prądu, ze względu na
zjawisko nasycenia magnetycznego. W tym stanie niewielkim wzrostom napięcia odpowiadają stosunkowo
duże przyrosty prądu magnesującego. Wzrost napięcia ponad wartość znamionową może spowodować, że
prąd stanu jałowego przekroczy wartość prądu znamionowego i spowoduje uszkodzenie transformatora.
Odnosi się to do wszystkich urządzeń elektrycznych, których konstrukcja zawiera rdzeń stalowy z
uzwojeniami, a więc do silników elektrycznych i dławików. Producenci takich urządzeń i maszyn podają
dopuszczalny wzrost napięcia, który z reguły nie może przekraczać 10% napięcia znamionowego. Składowa
czynna prądu I
0cz
jest proporcjonalna do napięcia. Wartość tej składowej jest niewielka w stosunku do
składowej magnesującej i jest związana z występowaniem strat w żelazie. Można przyjąć, że prąd biegu
jałowego jest prądem biernym, wywołującym straty mocy biernej.
Stanem zwarcia transformatora nazywa się taką jego pracę, w której jedno z uzwojeń jest zasilane ze
źródła energii elektrycznej, a drugie (najczęściej wtórne) jest zwarte. Napięcie na zaciskach uzwojenia
zwartego jest równe zeru. Prąd płynie przez obydwa uzwojenia.
Transformator pobiera energię, ale jej nie oddaje. Całkowita moc transformatora w tym stanie stanowi
straty mocy w uzwojeniach (straty obciążeniowe w miedzi) i straty w żelazie. Na podstawie pomiarów
7
przeprowadzanych w stanie zwarcia można wyznaczyć niektóre ważne wielkości, jak napięcie zwarcia i
straty obciążeniowe.
Rys. 1.6. Stan zwarcia transformatora
Impedancja uzwojeń jest mała, dlatego próba zwarcia przy napięciu znamionowym jest niedopuszczalna.
Przeprowadza się tzw. zwarcie pomiarowe przy obniżonym napięciu zasilania. Napięcie, przy którym nastąpi
przepływ prądów znamionowych w uzwojeniach, nosi nazwę napięcia zwarcia. Napięcie to jest wyrażone w
procentach napięcia znamionowego i wynosi od 3 % (dla małych transformatorów) do 15 % (dla jednostek
najwyższych napięć i mocy).
Straty w żelazie zależą od kwadratu napięcia, a w stanie zwarcia napięcie to jest niewielkie, dlatego
można przyjąć, że są one pomijalnie małe w stosunku do strat obciążeniowych, które zależą od kwadratu
prądu i rezystancji uzwojeń. Prąd w stanie zwarcia jest, zgodnie z prawem Ohma, proporcjonalny do
napięcia, dlatego straty mocy będą zależeć od kwadratu napięcia zwarcia.
W stanie obciążenia uzwojenie pierwotne jest zasilane napięciem znamionowym, a do uzwojenia strony
wtórnej są dołączone odbiorniki. Moc doprowadzona do strony pierwotnej, pomniejszona o straty w żelazie i
obciążeniowe, jest oddawana przy innym napięciu odbiorcom strony wtórnej. Przy stałym napięciu
zasilającym straty w żelazie rdzenia są stałe i równe stratom określonym przy pracy jałowej. Straty
obciążeniowe zależą od stopnia obciążenia i mogą być wyznaczone na podstawie charakterystyki zwarcia.
Na tabliczce danych znamionowych na ogół są podawane straty w żelazie dla napięcia znamionowego i
straty obciążeniowe przy obciążeniu prądem znamionowym. Te drugie są na ogół 3-5 razy większe.
Sprawność transformatora jest określana stosunkiem mocy czynnej strony wtórnej do mocy czynnej strony
pierwotnej i najczęściej wyrażana w procentach. Przy stałej wartości napięcia zasilającego sprawność zależy
od stanu obciążenia transformatora, a więc od wartości prądu i współczynnika mocy. Przy pracy jałowej
sprawność jest równa zeru. Ze wzrostem obciążenia mocą czynną sprawność rośnie i ma wartość najwyższą,
gdy straty obciążeniowe osiągną wartość równą wartości strat w żelazie. Najczęściej jest osiągana przy ok.
75 % obciążeniu znamionowym.
Dalszy wzrost obciążenia powoduje nieproporcjonalnie większy wzrost strat obciążeniowych, dlatego
sprawność maleje, ale w niewielkim stopniu. Na sprawność ma również wpływ współczynnik mocy
obciążenia cosφ
2
; im jest on mniejszy tym mniejsza sprawność. Sprawność znamionowa transformatorów
jest wysoka i wynosi od 95 % dla małych jednostek do 99,7 % dla jednostek dużych.

8
Wzrost prądu obciążenia I
2
powoduje wzrost prądu strony pierwotnej. Przy pominięciu prądu biegu
jałowego w transformatorze jest zachowana równość amperozwojów strony pierwotnej i wtórnej: I
1
z
1
=I
2
z
2
.
Stąd wynika proporcjonalna zależność prądu 1
1
od prądu I
2
oraz, przy stałej wartości cosφ
2
od P
2
.
Zwiększonemu przepływowi prądu towarzyszy wzrost spadków napięć na opornościach transformatora,
dlatego napięcie na zaciskach wtórnych maleje. Zmiana napięcia jest liniowa. Spadek napięcia zależy od
wartości i rodzaju obciążenia oraz od napięcia zwarcia. Wzrost obciążenia powoduje również wzrost
współczynnika mocy od wartości cosφ
0
(zwykle poniżej 0,1) do wartości cosφ
2
przyłączonych odbiorników.
3. Zagadnienia obowiązujące studentów wykonujących ćwiczenie
a) Program ćwiczenia
b) Budowa i zasada działania jednofazowego indukcyjnego silnika klatkowego
c) Budowa i zasada działania jednofazowego silnika komutatorowego
d) Budowa i zasada działania transformatora i autotransformatora
e) Stany pracy transformatora (schematy)
Wyszukiwarka
Podobne podstrony:
6-Maszyny pršdu zmiennego, Politechnika Lubelska ZiIP, Elektrotechnika z elektroniką
Sprawozdanie Maszyny prądu zmiennego
Sprawozdanie Maszyny prądu zmiennego
Pomiary w obwodach pradu zmiennego II
maszyny prądu stałego maszyny specjalne
E 6 Impedancja i moc odbiorników prądu zmiennego
Maszyny prądu stałego
Maszyny pradu stalego
Ściągi z fizyki-2003 r, Silnik prądu stałego i prądnica prądu zmiennego
Prądnica prądu zmiennego
głogowski,elektrotechnika, MASZYNY PRĄDU STAŁEGO
Maszyny Prądu Stałego
Podstawowym urządzeniem sterowanym w przemyśle przez?lowniki są klatkowe silniki indukcyjne prądu zm
Maszyny prądu stałego111moje
Ściągi z fizyki-2003 r, Wyższość prądu zmiennego nad stałym
sprawdzone, FIZ 50, Obwód wyidealizowany. Do biegunów A i B źródła prądu zmiennego przyłączony jest
Maszyny prądu stałego, 2
Pomiar parametrow kondensatorow i cewek mostkami pradu zmiennego
więcej podobnych podstron