
Laboratorium podstaw robotyki
– 1 –
Układy regulacji - dobór parametrów
regulatora i charakterystyki
częstotliwościowe układów dynamicznych
Ćwiczenie 2
Instrukcja do ćwiczenia laboratoryjnego
Opracował: dr inż. Jarosław Kuśmierczyk
Warszawa 2012

2
Cel ćwiczenia:
Celem ćwiczenia jest zapoznanie się z metodami identyfikacji obiektu i wyznaczania
parametrów regulatora.
Pomiary wykonywane są na dwóch stanowiskach laboratoryjnych:
1. Sterowanie prędkością obrotową silnika elektrycznego pod obciążeniem - stanowisko
RT050
2. Sterowanie serwomechanizmem hydraulicznym - stanowisko RT0710
Wymagany zakres wiedzy:
Uwaga: Część niniejszej instrukcji zatytułowana "Informacje ogólne" nie omawia wszystkich
poniższych zagadnień. W celu zapoznania się z poniższymi zagadnieniami należy przeczytać
odpowiednie fragmenty z literatury. Przykładowe pozycje są wymienione na końcu instrukcji.
Zastosowania układów automatycznej regulacji.
Co to jest sprzężenie zwrotne?
Co to jest układ automatycznego sterowania w systemie zamkniętym (narysować schemat)?
Jakie są rodzaje wymuszeń?
Co to jest wymuszenie skokowe?
Co to jest wymuszenie harmoniczne?
Co to jest odpowiedź układu na wymuszenie skokowe i do czego służy (podać przykład)?
Co to jest charakterystyka czasowa układu?
Charakterystyka czasowa obiektu inercyjnego II-rzędu.
Co to jest stała czasowa obiektu inercyjnego II-rzędu i jaka jest jej interpretacja?
Metody wyznaczania parametrów regulatora.
Co to jest charakterystyka częstotliwościowa układu?
Charakterystyki częstotliwościowe - rodzaje
Charakterystyki częstotliwościowe - zastosowanie
Co to są charakterystyki Bodego i jak się je wyznacza?
Informacje ogólne:
Automatyka towarzyszy nam w życiu codziennym. Jest tak powszechna, że w większości
przypadków w ogóle nie zwracamy na nią uwagi. Występuje praktycznie w każdej dziedzinie
życia, tam gdzie mamy do czynienia ze sterowaniem procesem dynamicznym.
Z tego powodu wiedza dotycząca procesów regulacji jest bardzo istotna. Innym
zagadnieniem jest sposób doboru nastaw regulatora, które pozwolą na stabilną i wydajną
pracę układu.
Optymalne nastawy regulatorów opracowywane są zazwyczaj w postaci tabel, wykresów,
wzorów empirycznych. Mimo znacznej liczby metod doboru nastaw regulatorów, w wielu
przypadkach nadal dominuje sposób empiryczny.
Wyznaczanie wartości parametrów regulatora - metoda Zieglera Nicholsa
Aby wyznaczyć nastawy regulatora należy najpierw poznać właściwości dynamiczne
badanego układu. W tym celu, w przypadku obiektu rzeczywistego, należy zbadać odpowiedź
układu na skok wielkości wejściowej (wymuszenie skokowe) wokół wybranego punktu pracy
układu. Wykonanie większych wymuszeń jest zresztą możliwe tylko w układach wyłączonych z
normalnej eksploatacji lub doświadczalnych.
Charakterystyką czasową układu nazywa się przebieg w czasie odpowiedzi układu na
określony standardowy sygnał wejściowy (np. wymuszenie skokowe), podany na wejście
układu będącego w stanie równowagi.
3
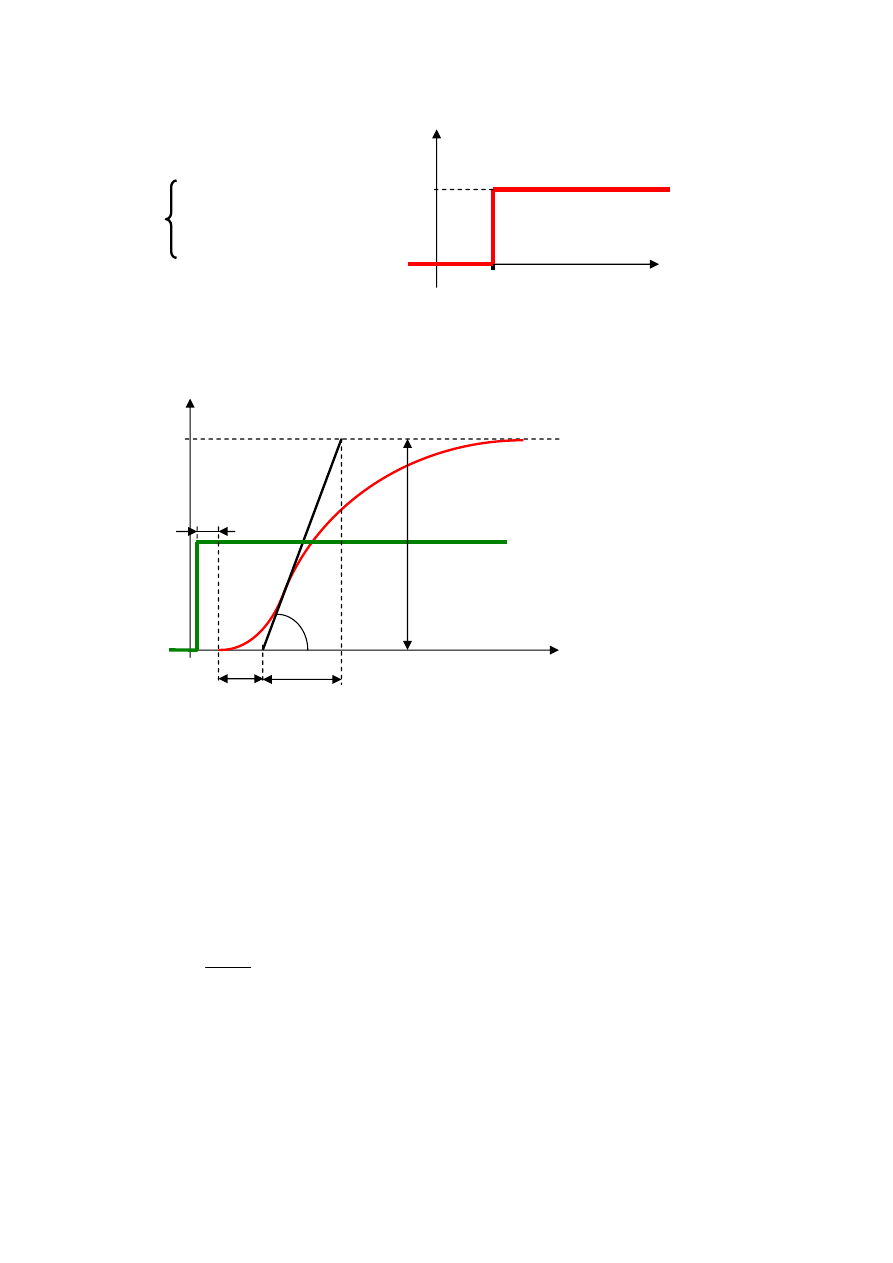
Wymuszenie skokowe jest sygnałem o wartości:
0 dla t<t
0
x(t) =
n dla t
0
<t
Rys.1. Wymuszenie skokowe.
Odpowiedź układu na wymuszenie skokowe umożliwia określenie rodzaju badanego
obiektu oraz podstawowe wskaźniki opisujące jego właściwości. Poniżej znajduje się
przykładowa charakterystyka czasowa odpowiedzi układu na wymuszenie skokowe.
Ta – stała czasowa układu
Tt – czas zwłoki
Tu – czas opóźnienia
K – wzmocnienie statyczne
x
st
– wartość wymuszenia skokowego
Rys.2. Odpowiedź układu na wymuszenie skokowe układu inercyjnego II-go rzędu
Ziegler i Nichols zauważyli, że odpowiedź skokowa większości układów sterowania ma
kształt podobny do tego z rys.1b. Krzywa ta może być otrzymana z danych
eksperymentalnych lub symulacji dynamicznej obiektu.
Nachylenie linii, oznaczone kolorem czarnym można wyznaczyć ze wzoru:
Ta
x
K
R
st
tan
x(t)
t
t
0
n
x(t)
t
Ta
Tu
Tt
K
.
x
st
x
st
4
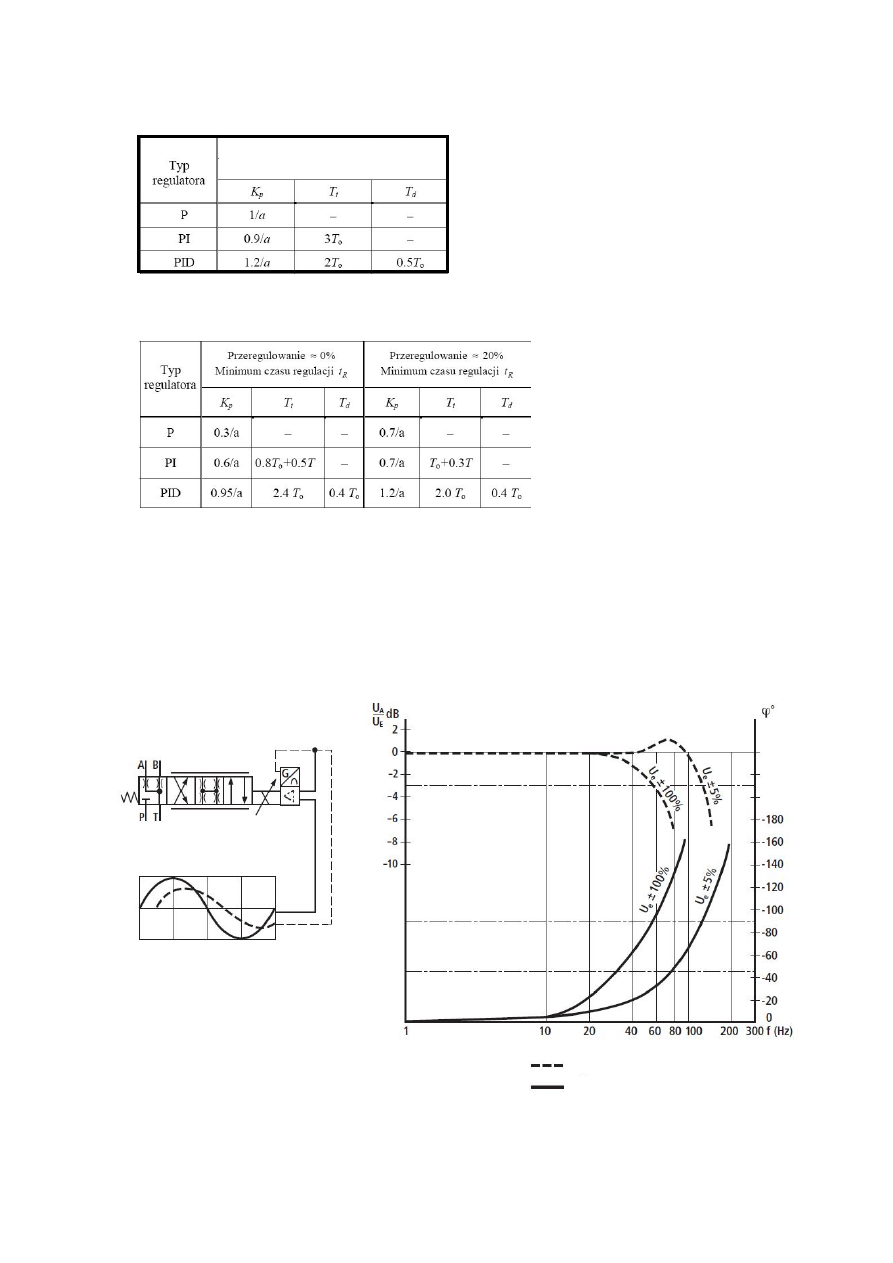
Tabela 1 Nastawy parametrów według Zieglera-Nicholsa.
Tabela 2 Inne reguły nastaw regulatorów.
Układy dynamiczne - wyznaczanie charakterystyk częstotliwościowych
Charakterystyki częstotliwościowe pozwalają na określenie właściwości układów
dynamicznych. Opisują one odpowiedź układu na wymuszenie harmoniczne, którego
częstotliwość zmienia się w określonym zakresie. Na ich podstawie można doświadczalnie
zidentyfikować układ, którego transmitancja nie jest znana. Na poniższym rysunku znajduje
się przykładowa charakterystyka częstotliwościowa zaworu regulacyjnego ciśnienia.
Rys.3. Charakterystyka częstotliwościowa zaworu 4WRPEH 6 [4]
Próba skokowa (R, T
o
=T
u
, a=R/T
u
)
Amplituda
Faza
5
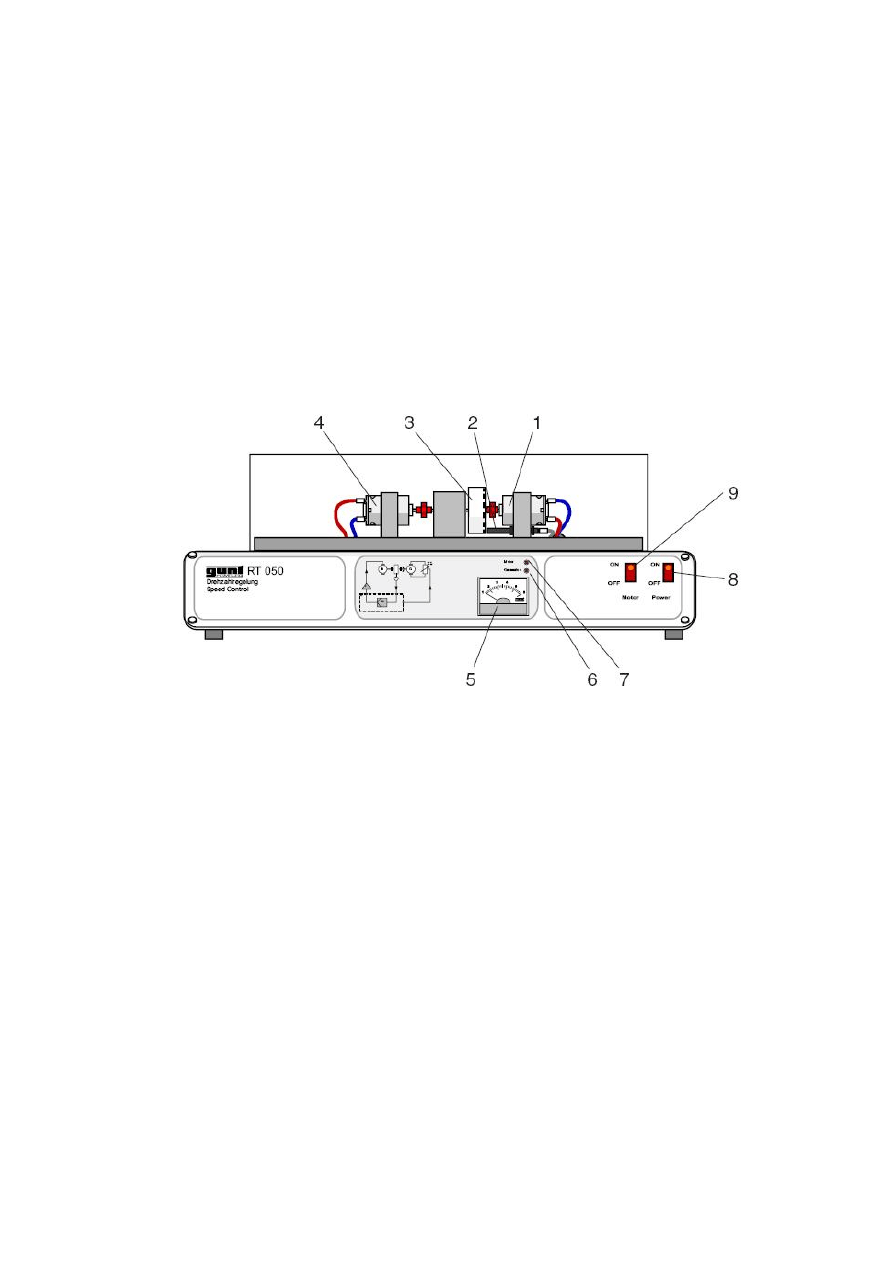
Stanowisko laboratoryjne RT050
Stanowisko laboratoryjne RT050 do regulacji prędkości obrotowej silnika elektrycznego
stanowi przykład typowego zamkniętego układu regulacji. Podstawowym elementem, którego
prędkością należy sterować jest silnik elektryczny połączony z kołem zamachowym.
Stanowisko umożliwia również wprowadzenie zakłócenia, które jest realizowane za pomocą
prądnicy o trzech stopniach obciążenia zamocowanej tym samym, co silnik wałku. Sygnał
prędkości obrotowej, sygnał impulsowy, jest otrzymywany z czujnika indukcyjnego
ustawionego przy kole zamachowym. Samo stanowisko stanowi jedynie model, natomiast
funkcje regulatora są realizowane przez oprogramowanie zainstalowane na komputerze klasy
PC, połączonym ze stanowiskiem za pomocą interfejsu USB. Oprogramowanie pozwala na:
– badanie wpływu rodzaju regulatora na jakość regulacji i odpowiedź na zakłócenia,
– badanie stabilności układu regulacji,
– optymalizacje parametrów regulatora.
1. Silnik elektryczny
7. Lampka kontrolna silnika elektrycznego
2. Czujnik prędkości obrotowej
8. Wyłącznik główny
3. Koło zamachowe
9. Wyłącznik silnika elektrycznego
4. Prądnica
> Gniazdo USB (tylna część obudowy)
5. Analogowy wskaźnik prędkości obrotowej
> Gniazdo zasilania (tylna część obudowy)
6. Lampka kontrolna prądnicy
Rys.4. Stanowisko do badania regulacji prędkości obrotowej silnika elektrycznego - RT050.
6
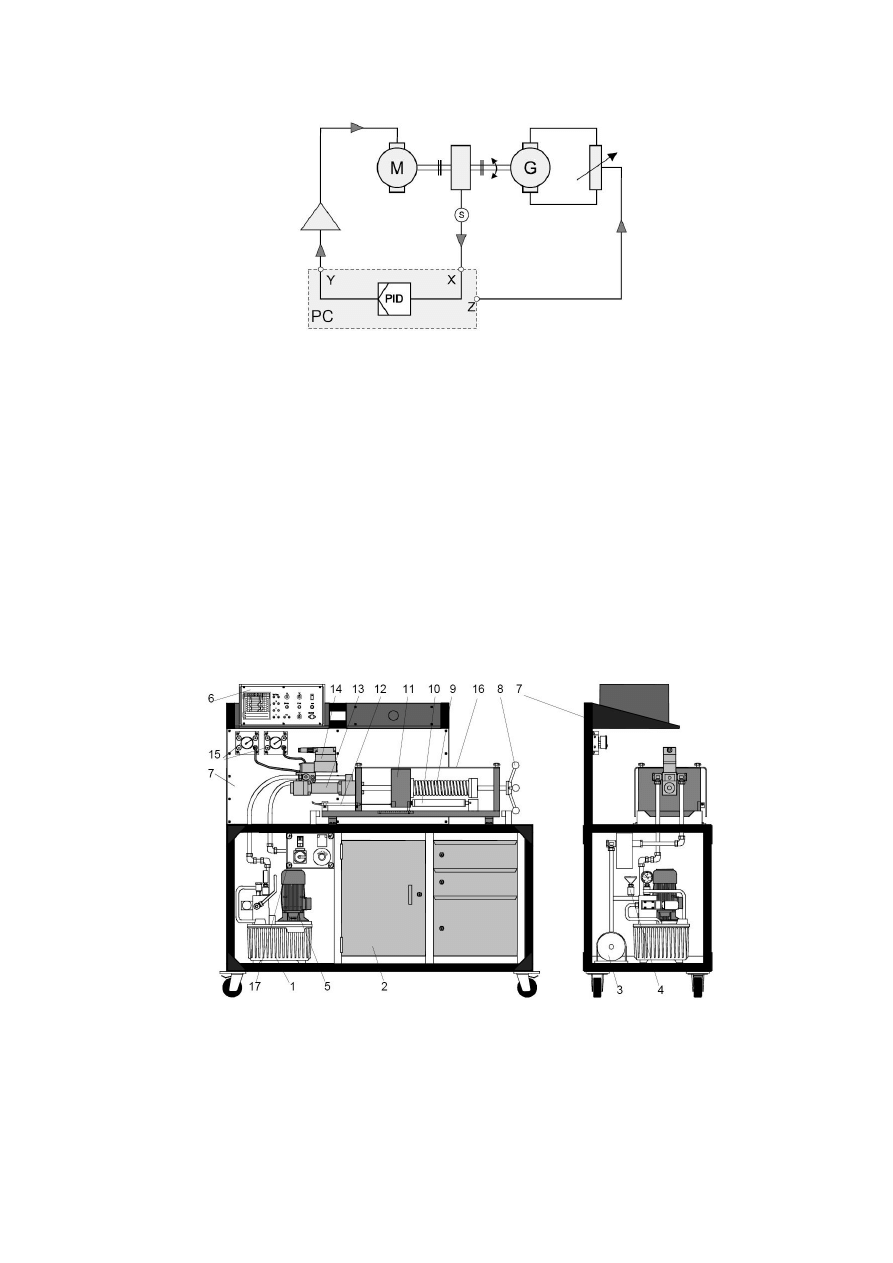
M - silnik elektryczny
Y - sygnał sterujący silnikiem elektrycznym
G - prądnica
X - sygnał prędkości obrotowej silnika
Z - sygnał sterujący prądnicą
Rys.5. Schemat blokowy stanowiska RT050.
Stanowisko laboratoryjne RT710
Stanowisko laboratoryjne służy do zapoznania się z układem serwomechanizmu
hydraulicznego. Jest to zamknięty układ sterowania położeniem tłoczyska cylindra
hydraulicznego. Pozwala ono na:
- zapoznanie się z działaniem serwomechanizmu,
- badanie wpływu obciążenia i parametrów regulatora na dokładność pozycjonowania,
- analizę stabilności układu,
- rejestrację odpowiedzi na wymuszenie skokowe i częstotliwościowe.
Rys.6. Stanowisko laboratoryjne
7
1. Zbiornik oleju
10. Tłumik
2. Szafka
11. Suwak
3. Akumulator hydrauliczny
12. Przetwornik położenia
4. Zawór bezpieczeństwa
13. Cylinder hydrauliczny
5. Pompa
14. Zawór regulacyjny
6. Wzmacniacz
15. Manometr
7. Tylna ściana
16. Osłona zabezpieczająca
8. Mechanizm napinania sprężyny
17. Panel sterujący
9. Sprężyny
Cylinder hydrauliczny (13) ma skok 150 mm. Zawór regulacyjny (14) jest zamontowany
bezpośrednio na cylindrze. Dzięki temu skrócono do minimum odległość między elementami.
Do tłoczyska przymocowany jest suwak (11) o masie 50 kg. Suwak jest zamocowany na
łożyskach kulkowych, które zmniejszają tarcie o podłoże.
Obciążenie cylindra hydraulicznego można regulować za pomocą dwóch symetrycznie
ustawionych sprężyn śrubowych (9).
Dzięki tłumikowi (10) stanowisko pozwala również prowadzić analizy dotyczące tłumienia.
Położenie suwaka jest mierzone za pomocą przetwornika potencjometrycznego (12) i
przekazywane do wzmacniacza (6), który znajduje się w oddzielnej obudowie. Wszystkie
sygnały sterujące można zmierzyć podłączając urządzenie pomiarowe do gniazd
umieszczonych na czołowej płycie wzmacniacza, który jest również wyposażony w drukarkę.
Zasilacz hydrauliczny składa się ze zbiornika oleju (1) o pojemności 10 litrów, pompy (5), filtra,
zaworu bezpieczeństwa, manometru, akumulatora hydraulicznego (3) i znajduje się poniżej na
dole stanowiska. Manometry (15) przymocowane do tylnej ściany (7) wskazują ciśnienie
panujące po obu stronach tłoczyska.
Na panelu sterującym (17) znajduje się włącznik pompy, główny włącznik zasilania, wyłącznik
awaryjny i gniazdko elektryczne (230V / 50Hz).
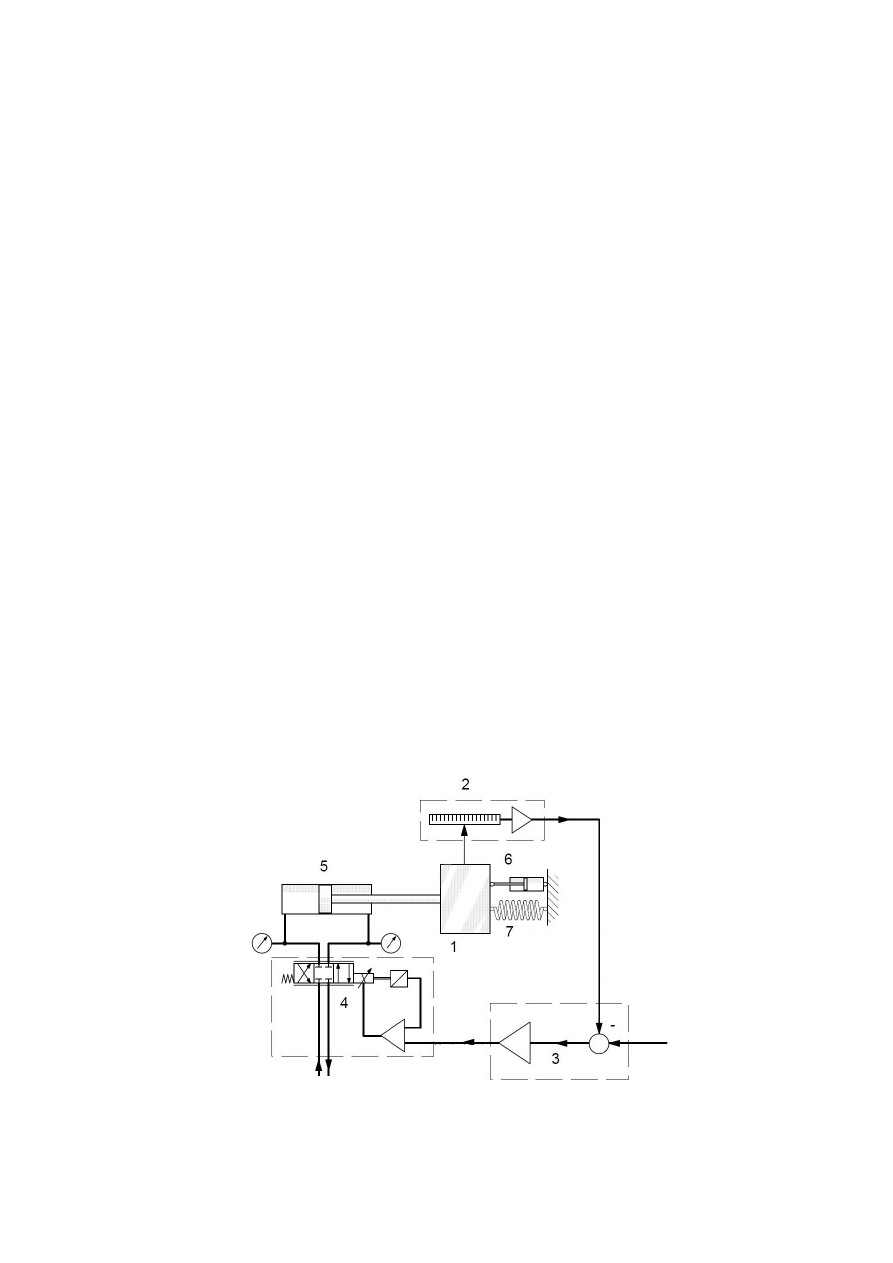
Rys.7. Schemat układu sterowania
Wartość rzeczywista
Wartość zadana
Przewody olejowe
Sygnał
sterujący

8
1. Suwak
5. Cylinder hydrauliczny
2. Przetwornik położenia
6. Tłumik
3. Wzmacniacz
7. Sprężyna
4. Zawór regulacyjny
Zadaniem układu sterującego zaworem regulacyjnym jest ustawienie suwaka (1) w zadanym
położeniu z największą możliwą dokładnością i prędkością.
W tym celu dokonywany jest pomiar rzeczywistego położenia suwaka (1) za pomocą
przetwornika położenia (2). Następnie wzmacniacz (3) porównuje wartość rzeczywistą z
wartością zadaną (wyznacza uchyb) i na tej podstawie steruje pracą zaworu.
Ważnym kryterium oceny jakości układu sterowania wykorzystującego zawór regulacyjny jest
dokładność pozycjonowania pod zmiennym obciążeniem, na którą decydujący wpływ ma jego
sztywność.
Wzrost obciążenia musi zostać zrównoważony przez wzrost ciśnienia po odpowiedniej stronie
tłoczyska cylindra hydraulicznego, który zależy od napięcia sterującego zaworem
regulacyjnym. Wartość napięcia jest określana przez sterownik na podstawie uchybu
położenia tłoczyska siłownika.
Sztywność układu jest określana jako iloraz obciążenia (zewnętrznej siły działającej na
tłoczysko) i błędu położenia tłoczyska.
9
Wyznaczenie charakterystyk Bodego:
Część pomiarowa
1. Zakres częstotliwości 0,1 - 5 Hz; współczynnik wzmocnienia Kp = 1,0 / 4,0
Pomiary należy przeprowadzić zgodnie z tabelą na karcie pomiarowej, do której należy wpisać
wyniki pomiaru.
2. Amplituda sygnału wejściowego A = 0,3 V, co odpowiada skokowi tłoczyska
siłownika o 4,5 mm
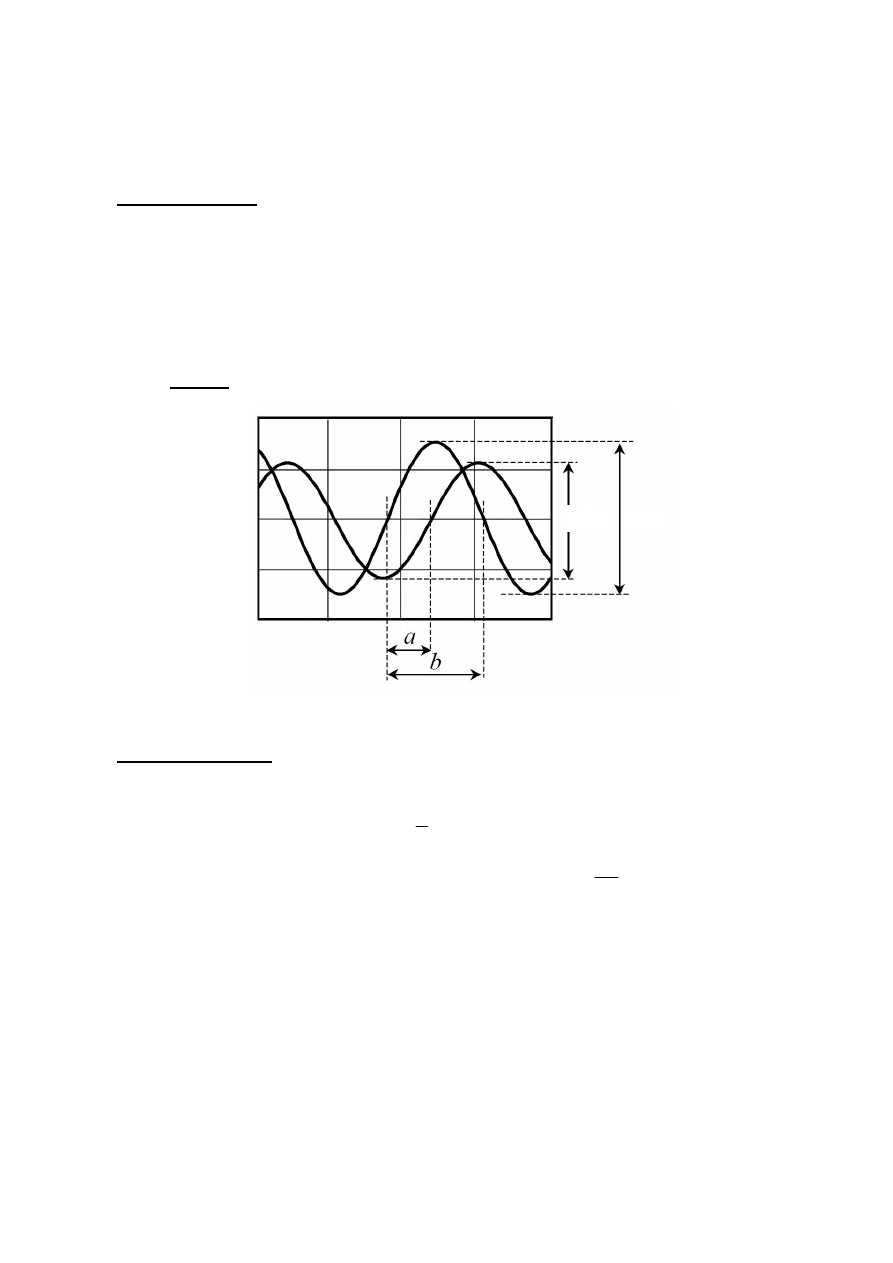
3. Sposób odczytu danych z oscyloskopu:
Uwaga: Oba przebiegi muszą być symetryczne względem osi OX
Metody określania przesunięcia fazowego: a) oscylogram Y-T
Część obliczeniowa
4. Na podstawie wyników pomiaru należy obliczyć wartości:
a. Przesunięcia fazowego:
180
b
a
[
o
]
b. Zmiany amplitudy (wzmocnienia układu):
A
B
Lm
2
2
log
20
[dB]
5. Narysować wykres przesunięcia fazowego i wzmocnienia układu w funkcji częstotliwości
(na jednym wykresie - arkusz znajduje się na końcu instrukcji).
Przygotowanie sprawozdania:
Sprawozdanie powinno zawierać tabele z wynikami pomiarów wykres, charakterystyki
Bodego (tabele i szablon dostarczy prowadzący), obliczenia (na odwrocie stron z
tabelami).
Uwaga: Sprawozdanie należy oddać na zakończenie ćwiczenia.
2A
2B
10
Nr ćwiczenia:
Temat:
Zespół/Podzespół:
Grupa:
Data:
Lista osób wykonujących ćwiczenie:
1. ……………………………………………….
2. ……………………………………………….
3. ……………………………………………….
4. ……………………………………………….
5. ……………………………………………….
6. ……………………………………………….
7. ……………………………………………….
8. ……………………………………………….
9. ……………………………………………….
10.
……………………………………………….
11.
……………………………………………….
12.
……………………………………………….
11
Warszawa, dn. …………………….
Laboratorium
Wyznaczanie charakterystyki Bodego
Grupa: …………..
Zespół: ………/………
Lista osób:
1. ………………………………………………….
2. ………………………………………………….
3. ………………………………………………….
4. ………………………………………………….
5. ………………………………………………….
6. ………………………………………………….
7. ………………………………………………….
8. ………………………………………………….
9. ………………………………………………….
Karta pomiarowa
Częstotliwość
[Hz]
a
[ms]
b
[ms]
A
2
[mV]
B
2
[mV]
0,1
0,5
1,0
2
3
5
12
Warszawa, dn. …………………….
Laboratorium podstaw robotyki
Układy regulacji ‐ identyfikacja obiektu i
dobór parametrów regulatora
Grupa: …………..
Zespół: ………/………
Lista osób:
1. ………………………………………………….
2. ………………………………………………….
3. ………………………………………………….
4. ………………………………………………….
5. ………………………………………………….
6. ………………………………………………….
7. ………………………………………………….
8. ………………………………………………….
9. ………………………………………………….
Karta wyników
Stanowisko RT050 - sterowanie prędkością obrotową silnika elektrycznego
Parametry
Typ
regulatora
K
p
T
i
T
d
P
PI
PID
CHARAKTERYSTYKI BODEGO
Grupa: …………..
Zespół: ………/………
– 13 –
Wyszukiwarka
Podobne podstrony:
[14.10.2014] Wilgotność optymalna, Ćwiczenie nr 9 - Wyznaczenie wilgotności optymalnej gruntu (2.01.
Ćwiczenia nr 6 (2) prezentacja
cwiczenie nr 7F
cwiczenie nr 2
Ćwiczenie nr 4
Ekonomia ćwiczenia program PS1 2014 2015 (1)
cwiczenia nr 5 Pan Pietrasinski Nieznany
cwiczenia nr 7
Cwiczenie nr 8 Teksty id 99954
Cwiczenia nr 2 RPiS id 124688 Nieznany
Cwiczenia nr 10 (z 14) id 98678 Nieznany
Ćwiczenie nr 1 (Access 2007)
cwiczenie nr 8F
Cwiczenie nr 2 Rysowanie precyzyjne id 99901
Cwiczenia nr 1 z l Zepoloych do
CWICZENIE NR 4 teoria
ćwiczenie nr 4
SPRAWOZDANIE Z CWICZENIA NR 4, Technologia zywnosci, semestr III, chemia zywnosci
więcej podobnych podstron