1
Ć
WICZENIE NR 4
BADANIE PRZEKAŹNIKÓW KIERUNKOWYCH
Instrukcja skrócona
1
1.
Przeznaczenie i zastosowanie przekaźników kierunkowych
Przekaźniki kierunkowe, zwane też kątowymi, przeznaczone są do kontroli kierunku
przepływu mocy zwarciowej. Stosowane są w różnych układach zabezpieczeń, które ze względu
na warunek wybiórczości działania wymagają określenia kierunku przepływu mocy zwarciowej.
Są to najczęściej zabezpieczenia nadprądowe sieci pierścieniowej lub dwustronnie zasilanej, a
także zabezpieczenia odległościowe. Jako samodzielne człony mierzące przekaźniki kierunkowe
znajdują szerokie zastosowanie w zabezpieczeniach ziemnozwarciowych sieci rozdzielczych
ś
rednich napięć.
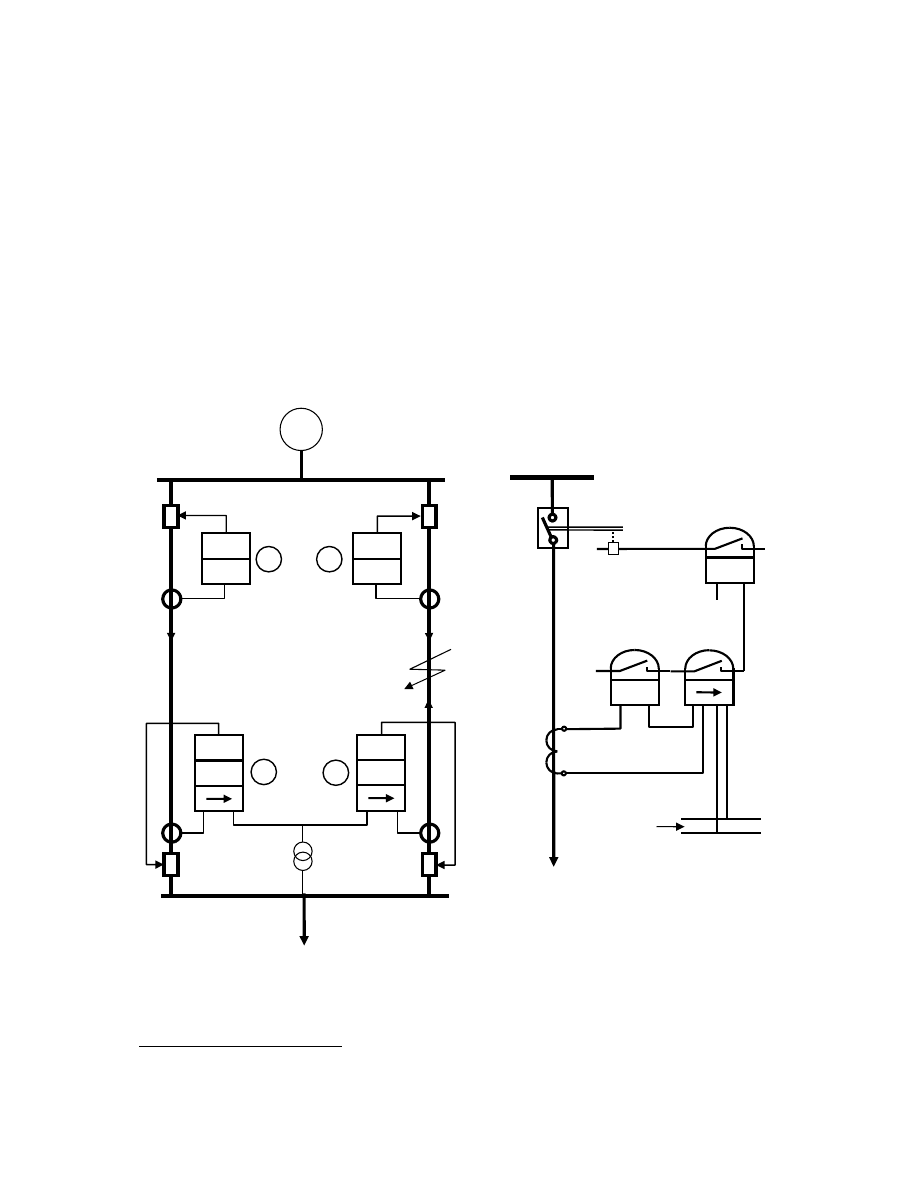
Rys. 1. Przykład zastosowania przekaźników kierunkowych; a) układ linii dwutorowej z
zabezpieczeniami nadprądowo-kierunkowymi, b) schemat ideowy zabezpieczenia nadprądowo-
kierunkowego zwłocznego
1
Opracował dr inż. W. Dzierżanowski na podstawie skryptu pt. „Automatyka elektroenergetyczna – ćwiczenia
laboratoryjne”, cz.I, praca zbiorowa pod red. B. Synala, Wyd. Politechniki Wrocławskiej 1991
PN
t
I>
t
I>
t
I>
I>
t
~
t
I>
(+)
(-)
(-)
(+)
OW
U
a)
b)
A
B
1
2
3
4
E
L1
L2
PP
PP
z PN

2
Przykład zastosowania przekaźników kierunkowych w układzie zabezpieczeń nadprądowo-
kierunkowych zwłocznych w najprostszej sieci pierścieniowej pokazano na rys. 1.
Najprostszą sieć pierścieniową tworzy linia 2-torowa (L1, L2) zasilana jednostronnie ze
ź
ródła E, jak na rys. 1a). W celu zapewnienia wybiórczości działania zabezpieczeń
nadprądowych zwłocznych linii w takim układzie sieciowym, konieczne jest zastosowanie
przekaźników kierunkowych tam, gdzie moc zwarciowa może zmieniać kierunek w zależności
od położenia miejsca zwarcia. W tym wypadku zabezpieczenia obu linii w stacji B muszą być
wyposażone w przekaźniki kierunkowe, które powinny blokować zabezpieczenie w przypadku
wykrycia przepływu mocy zwarciowej w kierunku szyn stacji B. Opóźnienia czasowe (t
B
)
zabezpieczeń w stacji B są mniejsze od opóźnień (t
A
) w stacji A o czas stopniowania ∆t. W razie
wystąpienia zwarcia, np. w torze L2 (jak na rys. 1) pobudzają się człony prądowe wszystkich
zabezpieczeń w układzie sieciowym. Impuls na wyłączenie, jako pierwszy, poda z opóźnieniem
t
B
przekaźnik 4 w stacji B, gdyż jego człon kierunkowy na to zezwoli z uwagi na przepływ
mocy zwarciowej od szyn stacji B. W tym samym czasie człon kierunkowy zabezpieczenia 3
działa blokująco. Po otwarciu wyłącznika toru L2 w stacji B prąd zwarciowy w zdrowym torze
L1 zanika i jego zabezpieczenia (1 i 3) wracają do stanu spoczynku. W stanie pobudzenia
pozostaje zabezpieczenie nadprądowo-zwłoczne 2 toru L2 w stacji A, które po nastawionym
czasie t
A
spowoduje otwarcie wyłącznika, dokonując w ten sposób ostatecznej wybiórczej
eliminacji zwarcia.
Prąd rozruchowy członów prądowych omawianych zabezpieczeń dobiera się wg takich
samych zasad jak dla linii promieniowych, tzn. powyżej maksymalnej wartości prądu obciążenia
toru , z uwzględnieniem chwilowych przeciążeń ruchowych linii i współczynnika powrotu
zastosowanych członów prądowych zabezpieczenia. Czasy opóźnień dobiera się wg ogólnych
zasad stopniowania czasowego zabezpieczeń nadprądowo-zwłocznych, stosowanych w sieciach
promieniowych i magistralnych, tj. t
i
= t
i-1
+ ∆t.
Pełny układ zabezpieczenia nadprądowo-kierunkowego w sieci trójfazowej jest realizowany
według zasady zilustrowanej na rys. 1b), które może być w wykonaniu dwu lub trójfazowym.
Wykonanie dwufazowe stosowane jest w sieciach rozdzielczych z nieuziemionym skutecznie
punktem zerowym.
2.
Zasady realizacji i podstawowe charakterystyki przekaźników kierunkowych
Przekaźniki kierunkowe identyfikują kierunek przepływu mocy zwarciowej na zasadzie
kontroli kąta przesunięcia fazowego między napięciem i prądem wejściowym. Gdy wartość tego
kąta zawiera się w obszarze określonym charakterystyką kątową przekaźnika, przekaźnik działa,
a gdy wykracza poza tę charakterystykę – przekaźnik blokuje. Przekaźniki kierunkowe
realizowane są na bazie komparatorów fazy elektromechanicznych (starsze rozwiązania) i
statycznych, których sygnałami wejściowymi są prąd I i napięcie U pochodzące z obiektu
zabezpieczanego.
Ustrój pomiarowy przekaźnika kierunkowego, ze względów technicznych, nie może działać
przy dowolnie małych wartościach sygnałów wejściowych, dlatego w zastosowaniach
praktycznych przekaźnik kierunkowy nie może być traktowany jako idealny komparator fazy.
Potrzebna jest znajomość rzeczywistych charakterystyk eksploatacyjnych przekaźników
kierunkowych.
Podstawową wielkością, która charakteryzuje zakres kątowy działania przekaźnika
kierunkowego, bez względu na jego konstrukcję, jest tzw. kąt przesunięcia wewnętrznego (kąt
maksymalnej czułości).
3
Kąt przesunięcia wewnętrznego
Ψ
Ψ
Ψ
Ψ
jest to taki kąt, o jaki należy obrócić wektor prądu I z
położenia zgodnego z napięciem U w kierunku wyprzedzenia, aby moc rozruchowa P
r
, wyrażona
zależnością (1):
(
)
Ψ
−
=
ϕ
ϕ
ϕ
ϕ
cos
kUI
P
r
(1)
osiągnęła maksymalną wartość.
gdzie:
U – napięcie przyłożone do napięciowego obwodu wejściowego przekaźnika,
I – prąd płynący w prądowym obwodzie wejściowym przekaźnika,
ϕ - kąt przesunięcia fazowego pomiędzy napięciem U i prądem I w zabezpieczanym obiekcie,
Warunek działania przekaźnika kierunkowego można zapisać następująco:
(
)
)
2
(
cos
ro
r
P
kUI
P
≥
−
=
ψ
ψ
ψ
ψ
ϕ
ϕ
ϕ
ϕ
gdzie P
ro
– wartość mocy wejściowej potrzebna do zadziałania przekaźnika kierunkowego (w
komparatorze idealnym P
ro
=0).
Jak widać z zal. (2), na warunki działania przekaźnika kierunkowego mają wpływ zarówno
wartości amplitud sygnałów wejściowych U oraz I, jak i wartości: kąta przesunięcia fazowego ϕ
pomiędzy tymi sygnałami i kąta wewnętrznego ψ. Dla konkretnego zastosowania przekaźnika
kierunkowego określona jest wartość kąta ϕ, natomiast kąt wewnętrzny powinien być tak
dobrany, aby w warunkach zwarciowych moc rozruchowa przekaźnika osiągała wartość
maksymalną, co jest spełnione, gdy ψ=ϕ
Warunki działania przekaźników kierunkowych analizuje się na podstawie przebiegu ich
charakterystyk rozruchowych. Wyróżnia się trzy podstawowe charakterystyki rzeczywistych
przekaźników kierunkowych:
1.
U
r
=f(I) przy ϕ
ϕ
ϕ
ϕ = ψ
ψ
ψ
ψ = const
Wychodząc z warunku działania przekaźnika kierunkowego (zal. 2), przy ϕ = ψ otrzymuje
się:
)
3
(
I
P
U
ro
r
=
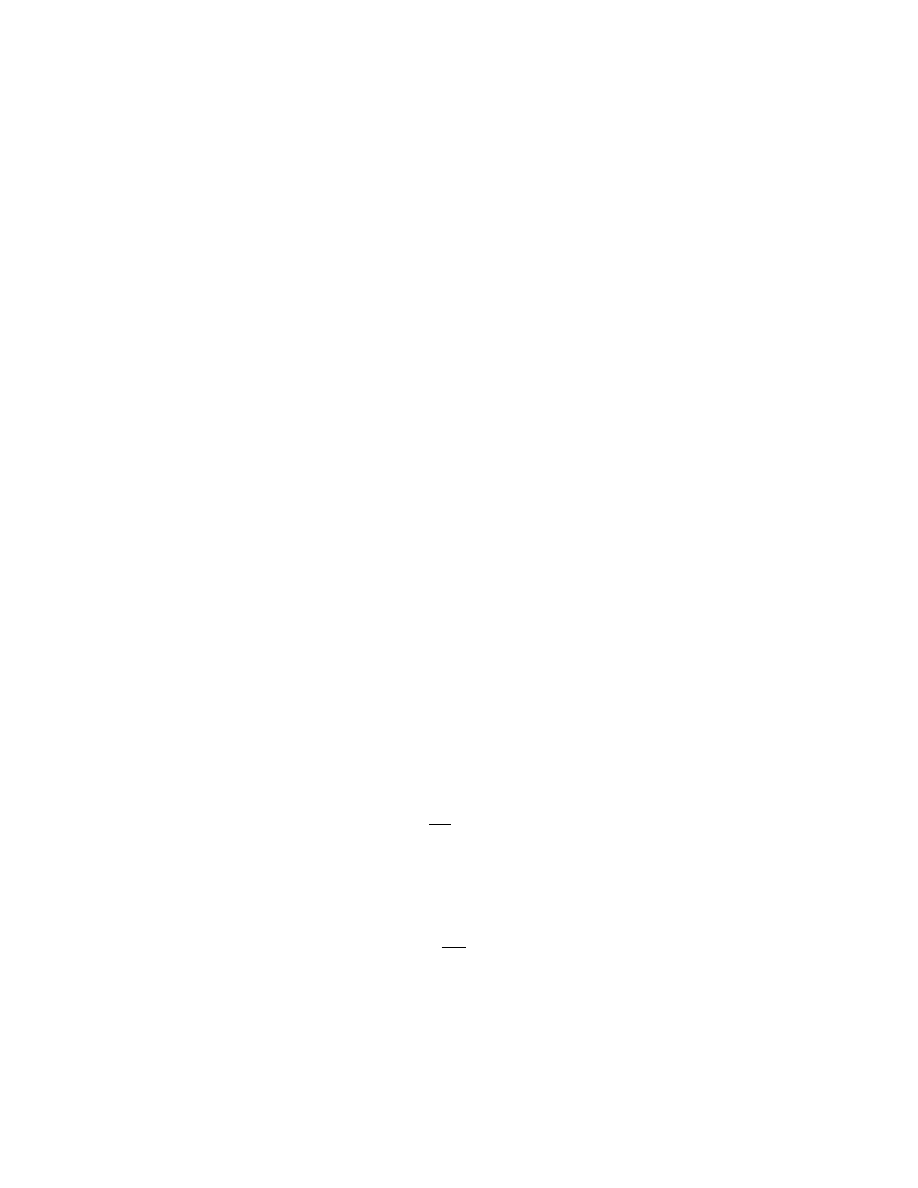
Na rys. 2 pokazano ilustrację graficzną tej zależności. Wartość napięcia rozruchowego U
r
=
U
cz
przy prądzie znamionowym nazywana jest czułością kierunkową przekaźnika. Wyrażana jest
ona często w procentach wartości znamionowego napięcia przekaźnika, jak niżej:
)
4
(
100
%
⋅
=
n
cz
cz
U
U
U
4
Rys. 2. Charakterystyka U
r
= f(I) przekaźnika kierunkowego.
Ponieważ najczęściej U
n
= 100 V, przeto wartość mierzona U
cz
wyrażona w [V] stanowi
jednocześnie wartość procentową czułości kierunkowej.
Charakterystyka pokazana na rys. 2 jest charakterystyką teoretyczną, ważną przy stałej
wartości mocy rozruchowej P
ro
. W rzeczywistych przekaźnikach kierunkowych często w
obwodzie napięciowym stosowane są elementy nieliniowe (np. żarówki), o malejącej wartości
rezystancji wraz z napięciem, w celu zwiększenia czułości przekaźnika przy zwarciach bliskich.
Ponadto w elektromechanicznych przekaźnikach kierunkowych zmniejszanie się U
r
wraz ze
wzrostem prądu następuje wyraźnie tylko w zakresie do ok. 2I
n
. Przy większych wartościach
prądu wartość napięcia U
r
zmniejsza się niewiele ze względu na nasycanie się obwodu
magnetycznego przekaźnika.
2.
Charakterystyka kątowa U
r
= f(Ψ
Ψ
Ψ
Ψ) przy I = In = const
Charakterystyki tego rodzaju są wyznaczane dla przekaźników stosowanych w
zabezpieczeniach od zwarć wielofazowych, gdzie wartość napięcia pętli zwarciowej zmienia się
wraz z odległością zwarcia od miejsca zainstalowania zabezpieczenia. Dla przekaźników
kierunkowych ziemnozwarciowych natomiast, których wielkościami wejściowymi są napięcie i
prąd kolejności zerowej, wyznacza się charakterystykę I
r
= f(Ψ) przy U = U
n
= const. W
warunkach zwarcia doziemnego bowiem (zwłaszcza w sieciach nieuziemionych skutecznie)
wartość napięcia U
0
jest relatywnie wysoka i w niewielkim stopniu zależy od miejsca zwarcia
doziemnego w sieci.
Równanie tej charakterystyki, otrzymuje się wprost z wyrażenia (2) i ma ono postać
następującą:
)
5
(
)
cos(
ψ
ψ
ψ
ψ
ϕ
ϕ
ϕ
ϕ
−
=
C
U
r
gdzie: C = P
ro
/I
n
= const.
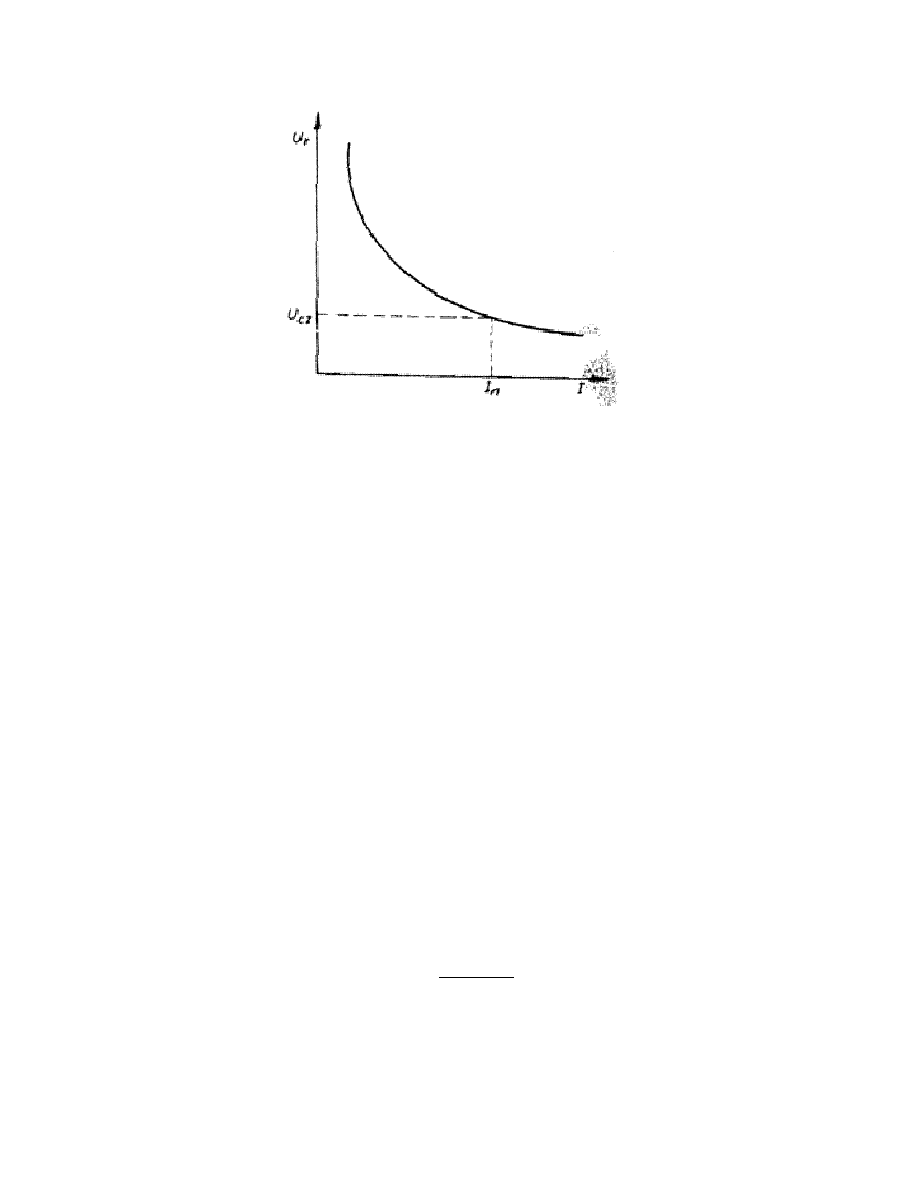
Obraz graficzny teoretycznej charakterystyki kątowej przekaźnika kierunkowego, określonej
równaniem (5), pokazano na rys. 3.
5
Rys. 3. Charakterystyka kątowa przekaźnika kierunkowego
Wyznacza ją krzywa zawarta między dwoma asymptotami odległymi o kąt π/2 od kąta
maksymalnej czułości Ψ. W praktyce charakterystyka taka wyznaczana jest pomiarowo w
laboratorium za pomocą przesuwnika fazowego jako źródła napięcia z regulacją modułu i fazy,
niezależnego od źródła prądu przemiennego. Należy zaznaczyć, że rzeczywista charakterystyka
może odbiegać od charakterystyki teoretycznej, ze względu na nieliniowości w obwodzie
napięciowym lub prądowym przekaźnika. Kąt maksymalnej czułości Ψ przekaźnika wyznacza
symetralna charakterystyki kątowej, prostopadła do osi odciętych układu współrzędnych
U
r
=f(ϕ).
3. Charakterystyka na płaszczyźnie impedancji Z przy I = I
n
.
Charakterystyka na płaszczyźnie Z = U/I = R + jX wyznacza kontur rozgraniczający obszary
działania i blokowania przekaźnika na tej płaszczyźnie, przy czym Z jest impedancją widzianą z
zacisków przekaźnika.
Przebieg tej charakterystyki, pokazany na rys. 4, wynika również bezpośrednio z równania
(2). Jeśli obie strony tego równania podzielimy przez I
2
, to otrzymamy wyrażenie:
)
6
(
)
cos(
a
Z
=
−
ψ
ψ
ψ
ψ
ϕ
ϕ
ϕ
ϕ
w którym: Z = U/I – moduł impedancji,
I
U
Z
/
arg
arg
=
=
ϕ
ϕ
ϕ
ϕ
a = P
ro
/I
2
Charakterystyk
ę
na płaszczy
ź
nie impedancji stanowi prosta prostopadła do osi maksymalnej
czuło
ś
ci przeka
ź
nika, przecinaj
ą
ca j
ą
w odległo
ś
ci „a” od pocz
ą
tku układu współrz
ę
dnych.
Warto
ść
„a”, maj
ą
ca wymiar impedancji, okre
ś
lana jest mianem „strefy martwej” przeka
ź
nika
kierunkowego.
Interpretacja fizyczna strefy martwej mo
ż
e by
ć
łatwo wyja
ś
niona na podstawie rys. 5.
Zgodnie z tym rysunkiem, przeka
ź
nik RK zainstalowany w stacji A, stanowi
ą
cy element
kontroluj
ą
cy kierunek przepływu mocy zwarciowej linii, otrzymuje nast
ę
puj
ą
ce wielko
ś
ci
wej
ś
ciowe pomiarowe: napi
ę
cie na p
ę
tli zwarcia U i pr
ą
d zwarciowy I. Napi
ę
cie na p
ę
tli zwarcia
jest okre
ś
lone wyra
ż
eniem:
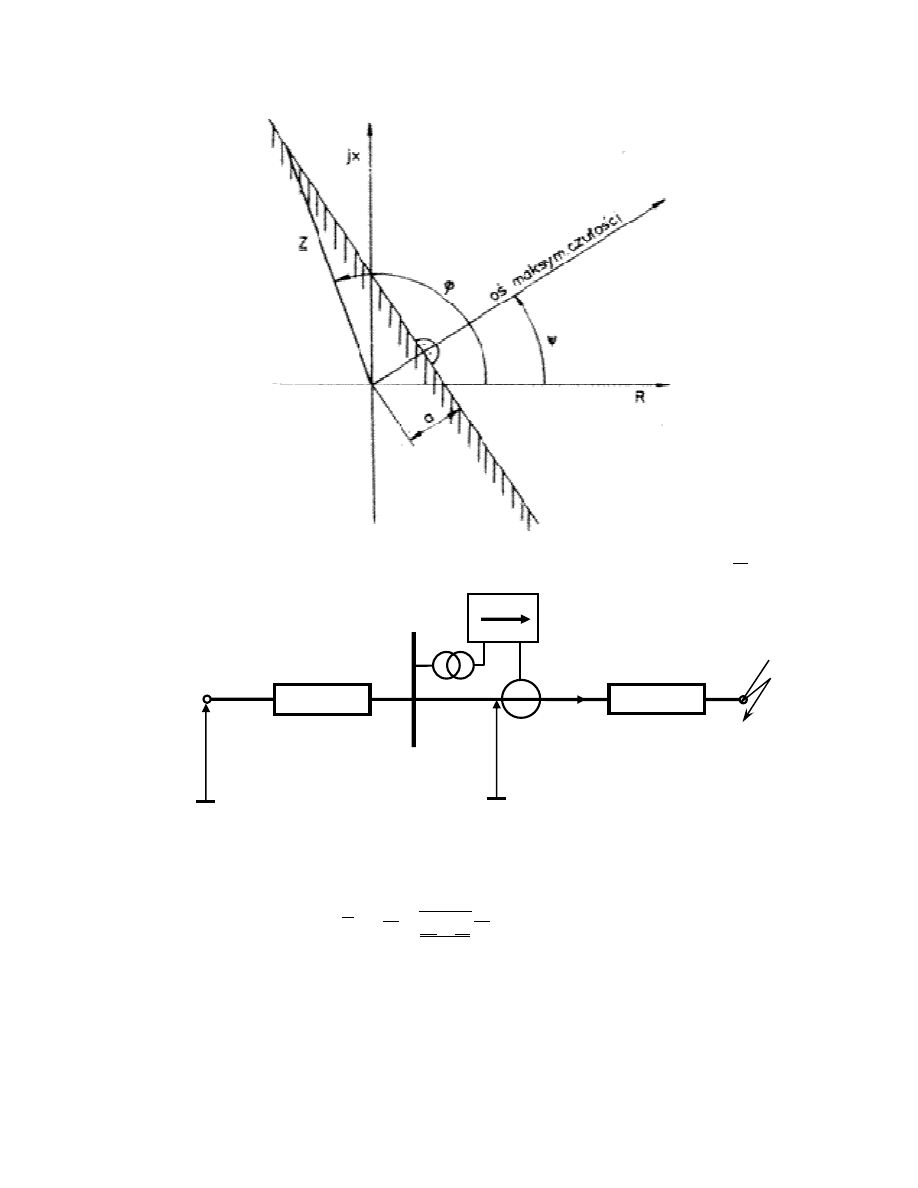
6
Rys. 4. Charakterystyka przeka
ź
nika kierunkowego na płaszczy
ź
nie impedancji Z.
Rys. 5. Warunki pracy przeka
ź
nika kierunkowego podczas zwarcia w zabezpieczanej linii
)
7
(
1
1
1
Z
Z
Z
E
Z
I
U
s
+
=
=
Przemieszczaj
ą
c miejsce zwarcia od punktu „K” do „A” zmniejsza si
ę
impedancja zwarciowa
Z
1
a wraz z ni
ą
napi
ę
cie U. W pewnej odległo
ś
ci od p. A napi
ę
cie U osi
ą
ga warto
ść
graniczn
ą
,
poni
ż
ej której moc wej
ś
ciowa przeka
ź
nika jest mniejsza od mocy rozruchowej P
ro
potrzebnej do
zadziałania i przeka
ź
nik nie działa ani na wyzwolenie, ani na blokowanie.
E
U
I
A
Z
s
Zl
K
RK
7
3.
Przebieg ćwiczenia
3.1.
Wyznaczenie k
ą
ta przesuni
ę
cia wewn
ę
trznego przeka
ź
nika kierunkowego
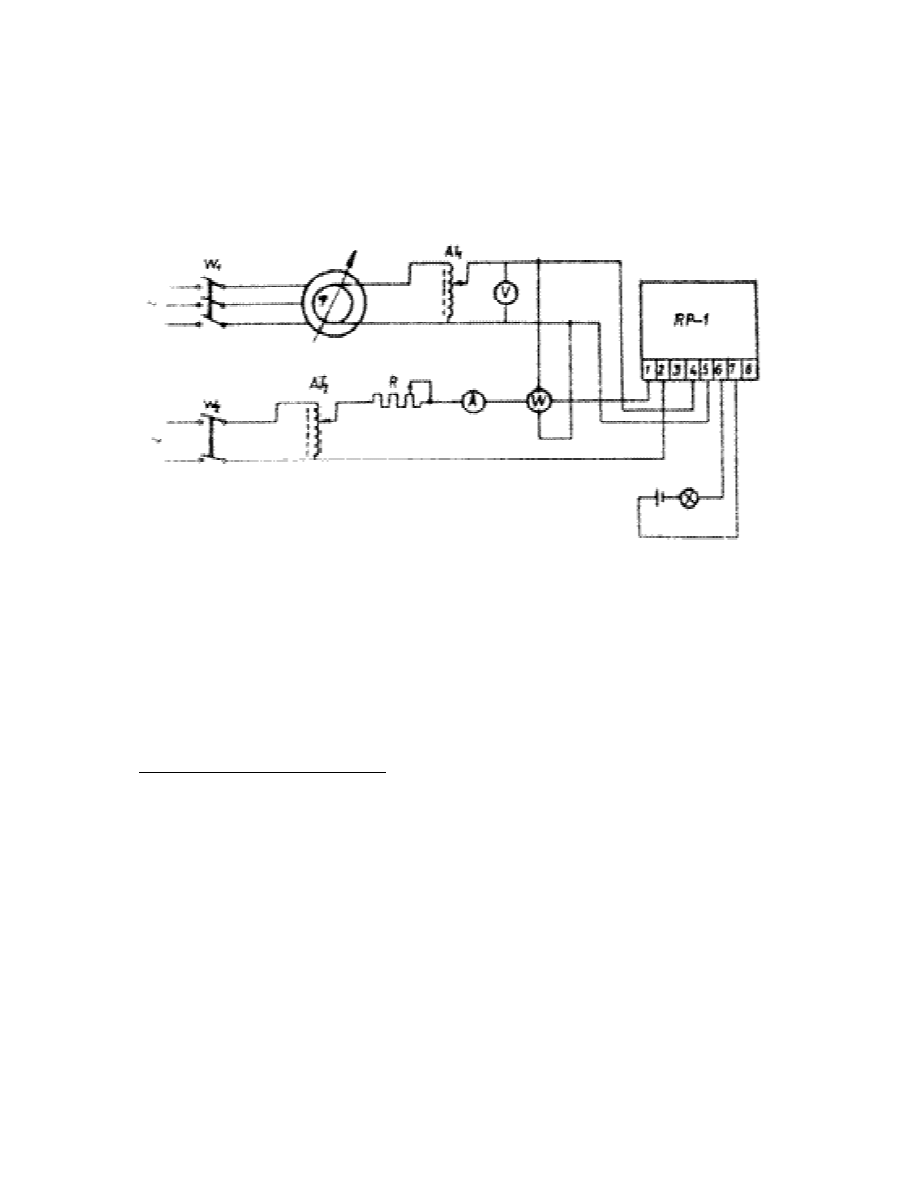
Schemat układu pomiarowego do okre
ś
lenia charakterystyki k
ą
towej przeka
ź
nika
kierunkowego przedstawiono na rys. 6.
Rys. 6. Schemat układu pomiarowego do wyznaczania charakterystyki k
ą
towej przeka
ź
nika
kierunkowego
Obwód pr
ą
dowy badanego przeka
ź
nika kierunkowego zasilany jest z autotransformatora AT2
przył
ą
czonego bezpo
ś
rednio do sieci nn, natomiast obwód napi
ę
ciowy – z autotransformatora
AT1 przył
ą
czonego do przesuwnika fazowego PF. Watomierz W jest wykorzystywany w
układzie pomiarowym tylko do ustalenia poło
ż
enia zerowego przesuwnika fazowego. Do
sygnalizacji zadziałania przeka
ź
nika kierunkowego mo
ż
na wykorzysta
ć
obwód z
ż
arówk
ą
do
którego zacisków dost
ę
pnych w stole laboratoryjnym nale
ż
y podł
ą
czy
ć
zestyki wyj
ś
ciowe
przeka
ź
nika.
Sposób przeprowadzenia pomiarów.
Pierwsz
ą
czynno
ś
ci
ą
jest wyznaczenie poło
ż
enia zerowego przesuwnika fazowego. W tym
celu w obwodzie pr
ą
dowym wymusza si
ę
pr
ą
d o warto
ś
ci równej pr
ą
dowi znamionowemu
przeka
ź
nika a napi
ę
cie zasilaj
ą
ce obwód napi
ę
ciowy doprowadza si
ę
do warto
ś
ci ok. 50 V.
Nast
ę
pnie, przez zmian
ę
poło
ż
enia wirnika przesuwnika fazowego, przesuwa si
ę
faz
ę
napi
ę
cia
tak długo, a
ż
wskazówka watomierza wska
ż
e warto
ść
zerow
ą
. Oznacza to,
ż
e przesuni
ę
cie
fazowe pomi
ę
dzy pr
ą
dem i napi
ę
ciem jest równe 90
0
. Strzałk
ę
przesuwnika fazowego przesuwa
si
ę
do punktu oznaczonego na skali jako 90
0
i w tym poło
ż
eniu nale
ż
y j
ą
zablokowa
ć
mechanicznie. Nale
ż
y dodatkowo sprawdzi
ć
, czy w przypadku ustawienia przesuwnika
fazowego w poło
ż
eniu 0
0
watomierz wskazuje maksymalne wychylenie.
Wa
ż
n
ą
spraw
ą
jest te
ż
ustalenie charakteru k
ą
ta przesuni
ę
cia fazowego pomi
ę
dzy pr
ą
dem i
napi
ę
ciem (pojemno
ś
ciowy, czy indukcyjny). Wykonuje si
ę
to równie
ż
za pomoc
ą
watomierza.
Przy poło
ż
eniu strzałki przesuwnika na warto
ś
ci 90
0
krótkotrwale zwiera si
ę
cewk
ę
pr
ą
dow
ą
watomierza. Je
ż
eli przesuni
ę
cie fazowe jest indukcyjne, to moment obrotowy działaj
ą
cy na
układ ruchomy watomierza jest ujemny i jego wskazówka wychyla si
ę
w lewo, poza skal
ę
. Je
ż
eli
k
ą
tjest pojemno
ś
ciowy, to moment obrotowy watomierza jest dodatni i wskazówka wychyli si
ę
w prawo.
PF
8
Po wyskalowaniu przesuwnika fazowego przyst
ę
puje si
ę
do wła
ś
ciwych pomiarów. Warto
ść
pr
ą
du w obwodzie pr
ą
dowym przez cały czas trwania pomiaru ma by
ć
stała i równa warto
ś
ci
znamionowej badanego przeka
ź
nika kierunkowego. Na przesuwniku fazowym nastawia si
ę
k
ą
t
ϕ=0
0
i powoli zwi
ę
ksza si
ę
napi
ę
cie obwodu napi
ę
ciowego a
ż
do zadziałania przeka
ź
nika
odczytuj
ą
c jednocze
ś
nie na woltomierzu warto
ść
rozruchow
ą
odpowiadaj
ą
c
ą
nastawionemu
k
ą
towi. W analogiczny sposób wykonuje si
ę
pomiary dla k
ą
tów zmienianych co 5
0
do 20
0
w
całym zakresie k
ą
tów, przy których wyst
ę
puje działanie przeka
ź
nika. Pomiary nale
ż
y zag
ęś
ci
ć
w
okolicy asymptot charakterystyki. Aby nie spowodowa
ć
przegrzania obwodu napi
ę
ciowego
przeka
ź
nika pomiary przerywa si
ę
wtedy, gdy napi
ę
cie zadziałania przekroczy 50 V.
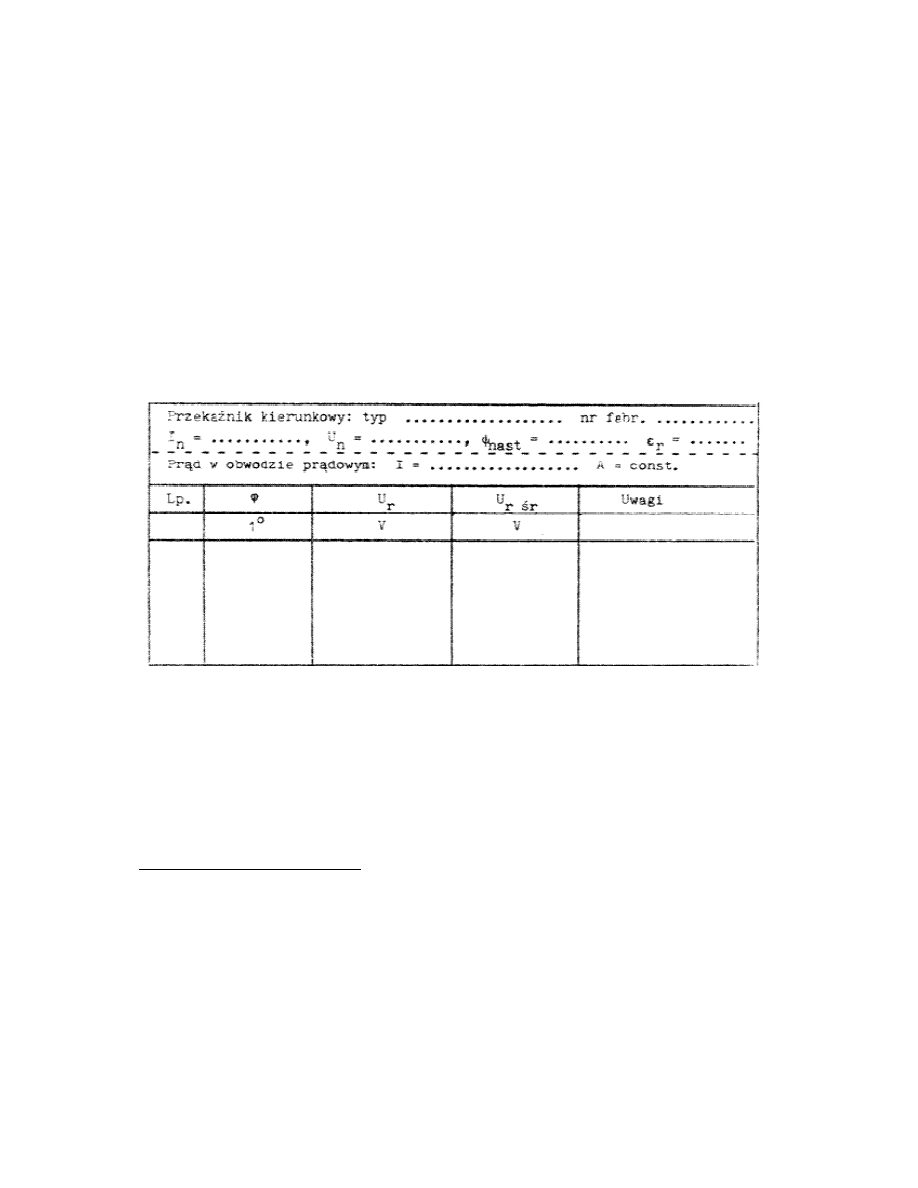
Wyniki bada
ń
zapisuje si
ę
w tabeli 1.Na podstawie wyników pomiarów sporz
ą
dza si
ę
charakterystyk
ę
U
rśr
= f(ϕ). Symetralna otrzymanej krzywej odcina na osi odci
ę
tych warto
ść
równ
ą
k
ą
towi przesuni
ę
cia wewn
ę
trznego Ψ. K
ą
t ten mo
ż
na równie
ż
obliczy
ć
znaj
ą
c k
ą
ty
asymptot charakterystyki U
rśr
= f(ϕ).
Tabela 1: Wyniki pomiarów charakterystyki U
r
= f(ϕ) przeka
ź
nika kierunkowego
3.2.
Wyznaczenie charakterystyk U
r
= f(I) oraz S
r
= f(I)
Jak wynika ze wzoru (3) charakterystyka U
r
= f(I) jest hiperbol
ą
. Ze wzgl
ę
du jednak na
nasycenie obwodu magnetycznego przeka
ź
nika elektromechanicznego, przy wi
ę
kszych pr
ą
dach
hiperbola ulega zniekształceniu, poniewa
ż
wzrasta wtedy moc rozruchowa S
r
przeka
ź
nika (patrz
rys. 7). Pomiary niezb
ę
dne do wykre
ś
lenia tej charakterystyki wykonuje si
ę
w układzie
pomiarowym przedstawionym na rys. 6. Podczas pomiarów powinna by
ć
stała warto
ść
rezystancji R w obwodzie pr
ą
dowym.
Sposób wykonywania pomiarów.
Charakterystyk
ę
U
r
= f(I) sporz
ą
dza si
ę
bezpo
ś
rednio po pomiarze charakterystyki U
r
= f(ϕ),
aby unikn
ąć
powtórnego skalowania przesuwnika fazowego. Przez cały czas pomiaru k
ą
t
przesuni
ę
cia fazowego ϕ pomi
ę
dzy pr
ą
dem a napi
ę
ciem ma by
ć
stały, równy k
ą
towi
wewn
ę
trznemu Ψ. Pomiary rozpoczyna si
ę
od warto
ś
ci pr
ą
du odpowiadaj
ą
cej pr
ą
dowi
znamionowemu badanego przeka
ź
nika. Autotransformatorem AT1 zwi
ę
ksza si
ę
napi
ę
cie w
obwodzie napi
ę
ciowym, a
ż
do zadziałania przeka
ź
nika kierunkowego. Pomiar powtarza si
ę
pi
ę
ciokrotnie notuj
ą
c wyniki w tabeli 2. Dla innych warto
ś
ci pr
ą
du obwodzie pr
ą
dowym
pomiary przeprowadza si
ę
analogicznie. Nale
ż
y zako
ń
czy
ć
je na warto
ś
ci pr
ą
du, przy której
napi
ę
cie rozruchowe przekracza 50 V.
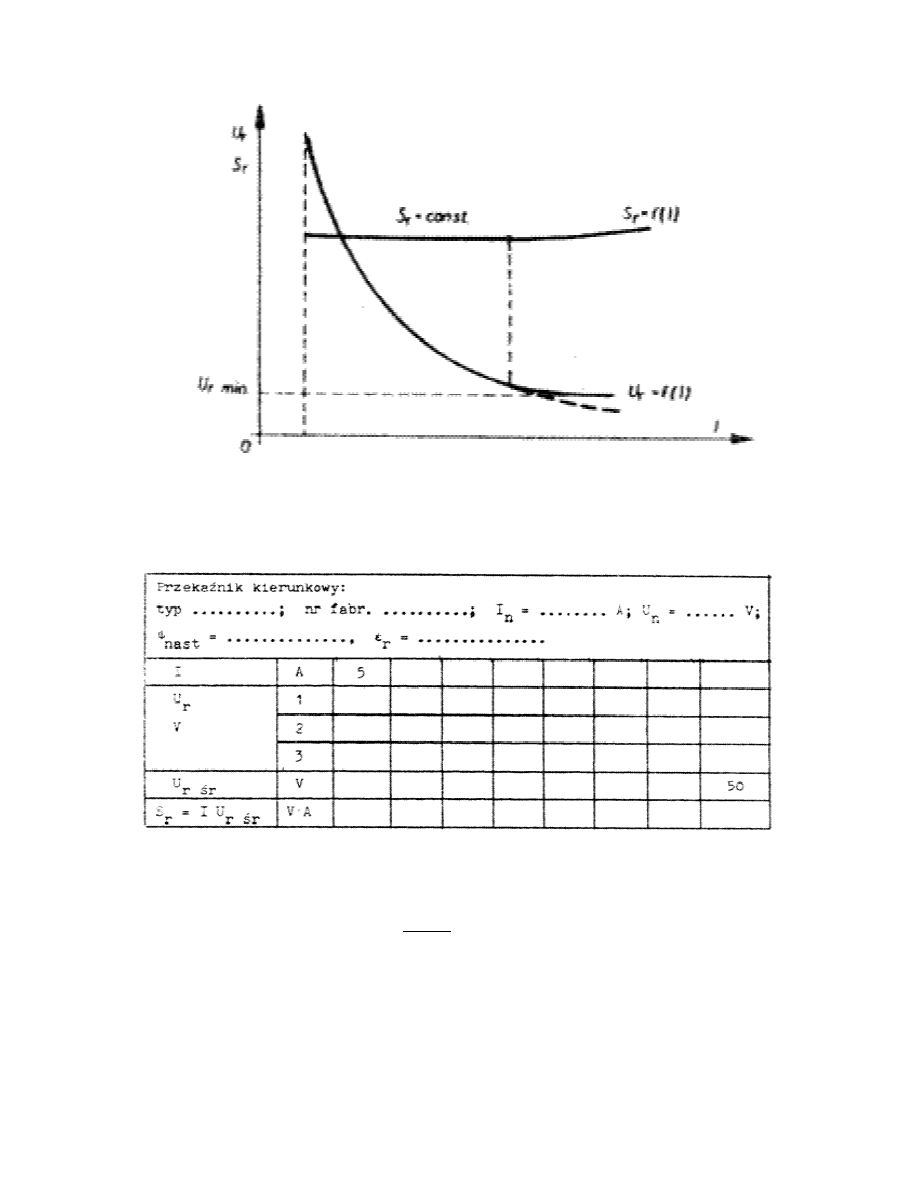
9
Rys. 7. Przykładowe charakterystyki U
r
= f(I) oraz S
r
= f(I) elektromechanicznego przeka
ź
nika
kierunkowego.
Tabela 2: Wyniki pomiarów charakterystyki U
r
= f(I) przeka
ź
nika kierunkowego
Na podstawie wyników pomiarów wykre
ś
la si
ę
charakterystyki U
r
= f(I) oraz S
r
= f(I) a tak
ż
e
wyznacza si
ę
czuło
ść
kierunkow
ą
przeka
ź
nika według wyra
ż
enia:
)
(
U
U
U
n
min
r
%
cz
8
100
⋅⋅⋅⋅
=
=
=
=
w którym U
r min
jest minimaln
ą
warto
ś
ci
ą
napi
ę
cia zadziałania przeka
ź
nika przy I = I
n
oraz ϕ=Ψ.
Najmniejsza moc S
r
potrzebna do rozruchu przeka
ź
nika oraz współczynnik czuło
ś
ci
kierunkowej U
cz
charakteryzuj
ą
stref
ę
martw
ą
zabezpieczenia kierunkowego. Znajomo
ść
warto
ś
ci tych wielko
ś
ci pozwala na obliczenie dla danej linii najwi
ę
kszej odległo
ś
ci mi
ę
dzy
miejscem zainstalowania przeka
ź
nika a miejscem trójfazowego zwarcia metalicznego, przy
której przeka
ź
nik kierunkowy nie zadziała.
Wyszukiwarka
Podobne podstrony:
ćw VI Badanie klaczy w kierunku źrebności
ćw II Tok badania klaczy w kierunku płodności
Ćw 10 Badanie Zabezpieczeń Kierunkowych EIST 4 6 Zespół nr
ZIA Ćw 05 Badanie przekaźnika nadprądowego czasowego RIT 30 doc
ZIA Ćw 11 Badanie przekaźnika napięciowo czasowego RET 430 doc
ZIA Ćw 01 Badanie przekaźnika pomocniczego doc
ZIA Ćw 04 Badanie przekaźnika napięciowego Ret 121 doc
ZIA Ćw 06 Badanie przekaźnika różnicowego RRTT 7R doc
ZIA Ćw 03 Badanie przekaźnika prądowego doc
ZIA Ćw 12 Badanie przekaźnika czasowego RT 431 doc
Cw 7 Badania kohortowe
ćw.7.Badanie wyłącznika APU, Elektrotechnika - notatki, sprawozdania, Urządzenia elektryczne, sprawo
przekaĹĽnik kierunkowy
cw 5 badanie izolacji papierowo olejowej
Instrukcja J, Poniedziałek - Materiały wiążące i betony, 08. (24.11.2011) Ćw J - Badanie cech użytko
cw 1 Badanie obwodów elektrycznych napięcia stałego poprawiona
Ćw 2 Badanie drgań pojazdu podczas jazdy
więcej podobnych podstron