
Opracowanie TC 2008
Autorzy:
Wojciech Abratkiewicz
Michał Antolik
Paweł Gawkowski
Piotr Pytko
©
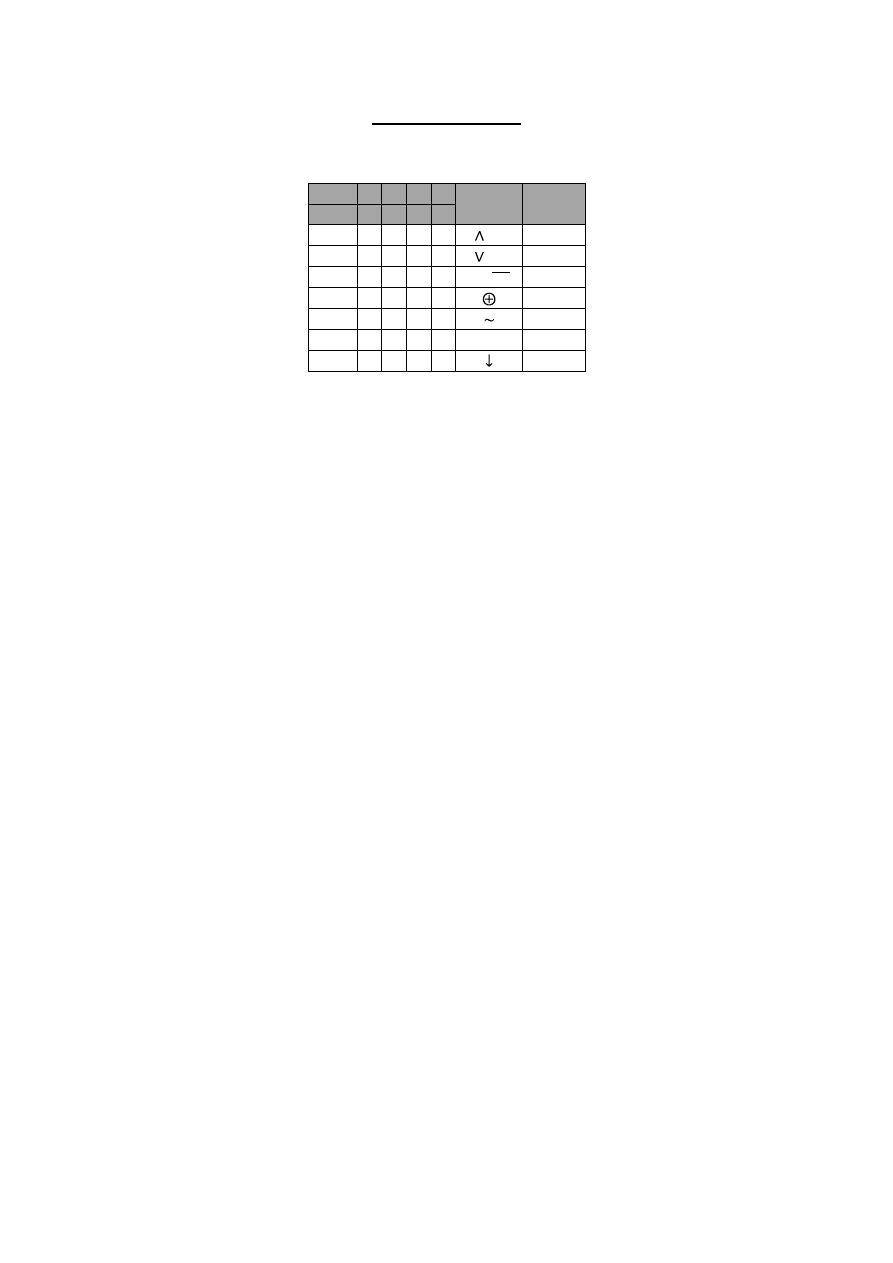
Funkcje podstawowe:
Są to funkcje, które posiadają nazwy operatorów. W sensie algebry Boole’a są to: OR, AND, NOT
x
1
0 1 0 1
Symbol Nazwa
x
2
0 0 1 1
f
1
0 0 0 1
•
AND
f
2
0 1 1 1
+
OR
f
3
(x
1
) 1 0 1 0
!
NOT
f
4
0 1 1 0
XOR
f
5
1 0 0 1
XNOR
f
6
1 1 1 0
|
NAND
f
7
1 0 0 0
NOR
System funkcjonalnie pełny – zbiór operatorów pozwalający na zapisanie dowolnej funkcji
boolowskiej w postaci wyrażenia
Pojęcia boolowskie
Literał – pojedynczy symbol zmiennej (zanegowanej lub nie), np. x lub ~x
Term iloczynowy – iloczyn literałów, w którym zmienne nie powtarzają się
Term sumacyjny – suma literałów, w której żadna zmienna nie powtarza się
Iloczyn pełny n zmiennych (minterm) – term iloczynowy zawierający n literałów
Suma pełna n zmiennych (max term) – term sumacyjny zawierający n literałów
Alfabety itp.
Wektor wyjściowy/słowo wyjściowe/stan wyjściowy/odpowiedź układu:
Kombinacja wartości wszystkich sygnałów wyjściowych - Y= y1,y2,…,ym)
Język wyjściowy = alfabet wyjściowy:
Zbiór wszystkich wektorów wyjściowych (wszystkie kombinacje wartości wyjśd, które mogą wystąpid).
Dla m wejśd istnieje max. 2^m kombinacji. W rzeczywistych układach często nie wykorzystuje się
wszystkich kombinacji.
Układ kombinacyjny:
Układ w którym stan każdego z wyjśd zależy od wartości wejśd . Można powiedzied, że stan każdego
wyjścia jest funkcją wszystkich wejśd. W konsekwencji słowo wyjściowe jest jednoznacznie określone
przez słowo wejściowe.
Liczba możliwych funkcji przełączających
Stan każdego z wyjśd jest pewną funkcją wszystkich wejśd (dla każdego z wyjśd funkcja ta może byd
różna):
Funkcję
nazywamy przełączającą
Wyrażenie boolowskie/funkcja boolowska/wielomian boolowski:
Wyrażenie utworzone ze zmiennych boolowskich (takich, które mogą przyjmowad wartości 0 i 1),
stałych 0 i 1 na których wykonujemy operacje boolowskie (+, *, ~)
Dualnośd wyrażeo boolowskich:
Każde wyrażenie boolowskie można przekształcid na dualne (są one równoważne) poprzez zamianę
miejsc operatorów +,* wartości 0,1 oraz zanegowanie zmiennych niezanegowanych i odwrotnie.
Mówi o tym tzw. Wzór Shannona (uogólnione prawa De Morgana)
~f(x
1
,f
2
,…,x
n
,+,*) = f(~x
1
,~x
2
,…,~x
n
,*,+)
Np.:
f(X) = x
1
~x
2
+ ~x
1
x
3
+ x
1
x
2
x
3
~f(X) = (~x
1
+x
2
) * (x
1
+~x
3
) * (~x
1
+~x
2
+~x
3
)
Liczba funkcji przełączających:
moc (Y^X) = moc (B^(B^n) = 2^(2^n)
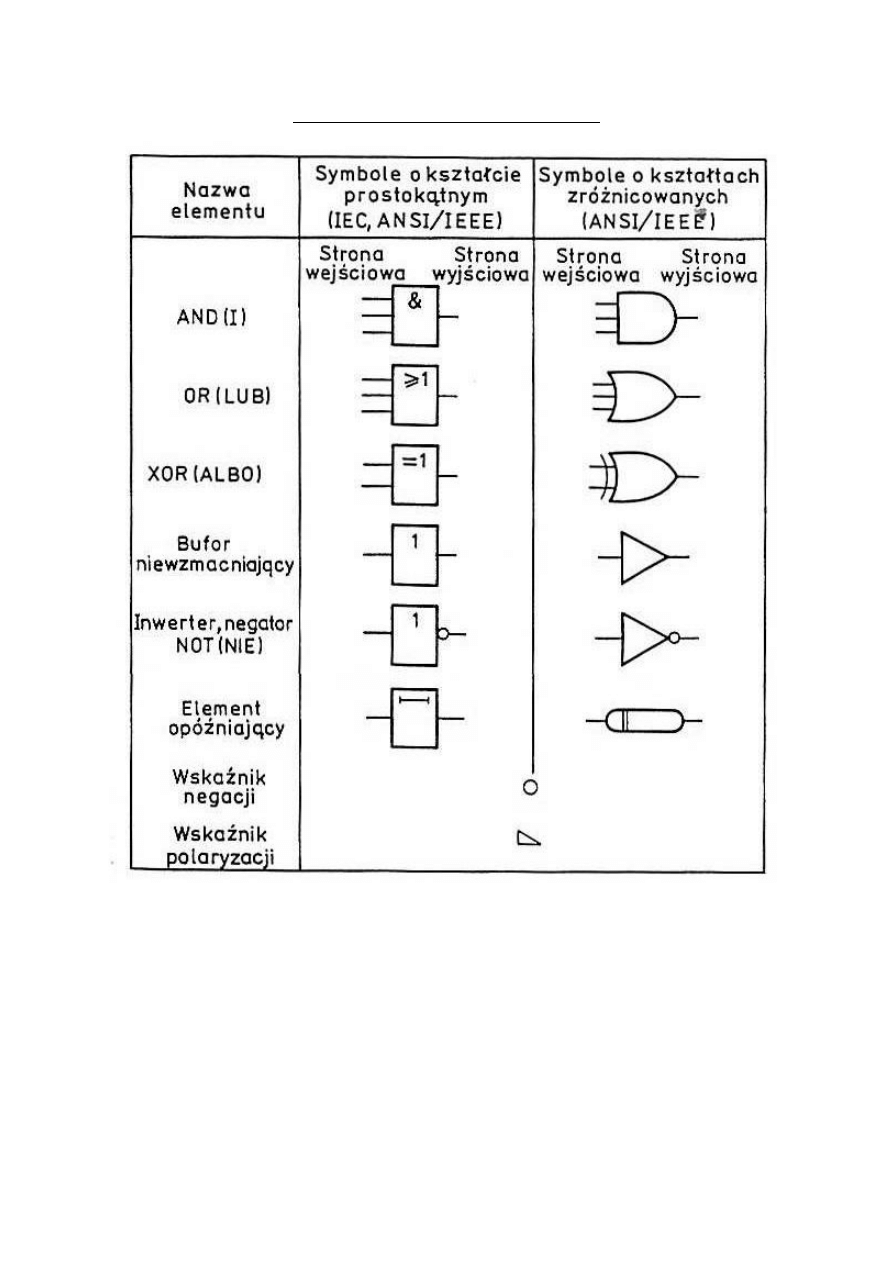
Symbole podstawowych układów kombinacyjnych
Parametry statyczne i dynamiczne bramek
1. Parametry bramek logicznych
a) statyczne
- napięcie zasilania U
CC
- napięcie wejściowe w stanie wysokim U
IH
- napięcie wejściowe w stanie niskim U
IL
- napięcie wyjściowe w stanie wysokim U
OH
- napięcie wyjściowe w stanie niskim U
OL
// te same z prądem, napięcie zamieniam na prąd a U na I
- prąd wyjściowy zwarcia I
OS
- prąd zasilania w stanie 1 na wyjściu I
CCH
- prąd zasilania w stanie 0 na wyjściu I
CCL
- straty mocy w bramce P
S
b) dynamiczne
- Średni czas propagacji – czas potrzebny na to, by zmiana sygnału na wejściu z 0 na 1
lub odwrotnie spowodowała stosowną zmianę na wyjściu
- Obciążalnośd – granica obciążenia bramki, czyli maksymalna ilośd bramek, jakie
dana bramka będzie w stanie sterowad podobne do siebie bramki. W związku z tym
definiuje się obciążenie jednostkowe oznaczane UL – Unity Load lub fan-in, i mówi
się, że obciążalnośdbramku wynosi np. 10 UL.
- Związek pomiędzy poborem mocy przez bramkę a częstotliwością przełączania –
ogólnie można stwierdzid, że jeśli bramka jest przełączana z częstotliwością f, to moc
pobierana da się opisad zależnością:
Pd=(Cl+Cpd)(Vdd-Vss)^2*f – Cl – pojemnośd obciążająca układ, Cpd – ekwiwalentna
pojemnośd związana z poborem prądu z zasilania w fazie przełączania bramki, Vss i
Vdd napięcia komplementarnych tranzystorów
- Średni pobór mocy,
- Zakres częstotliwości pracy- częstotliwośd pracy danego układu logicznego, kiedyś
układy ECL pracowały z częstotliwością 100 MHz, teraz PECL pracują z częstotliwością
3-4GHz i mają czasu propagacji rzędu 200-300ps
- Margines zakłóceo - maksymalne zewnętrzne napięcie, które nie spowoduje
niepożądanych zmian na wyjściu

- Moc rozpraszania - moc pobierana ze źródła i tracona przez bramkę
- Poziomy logiczne - wartości napięd odpowiadające stanom logicznym
- Związek między poborem mocy a częstotliwością przełączania - jak zmiana
częstotliwości wpływa na pobór mocy
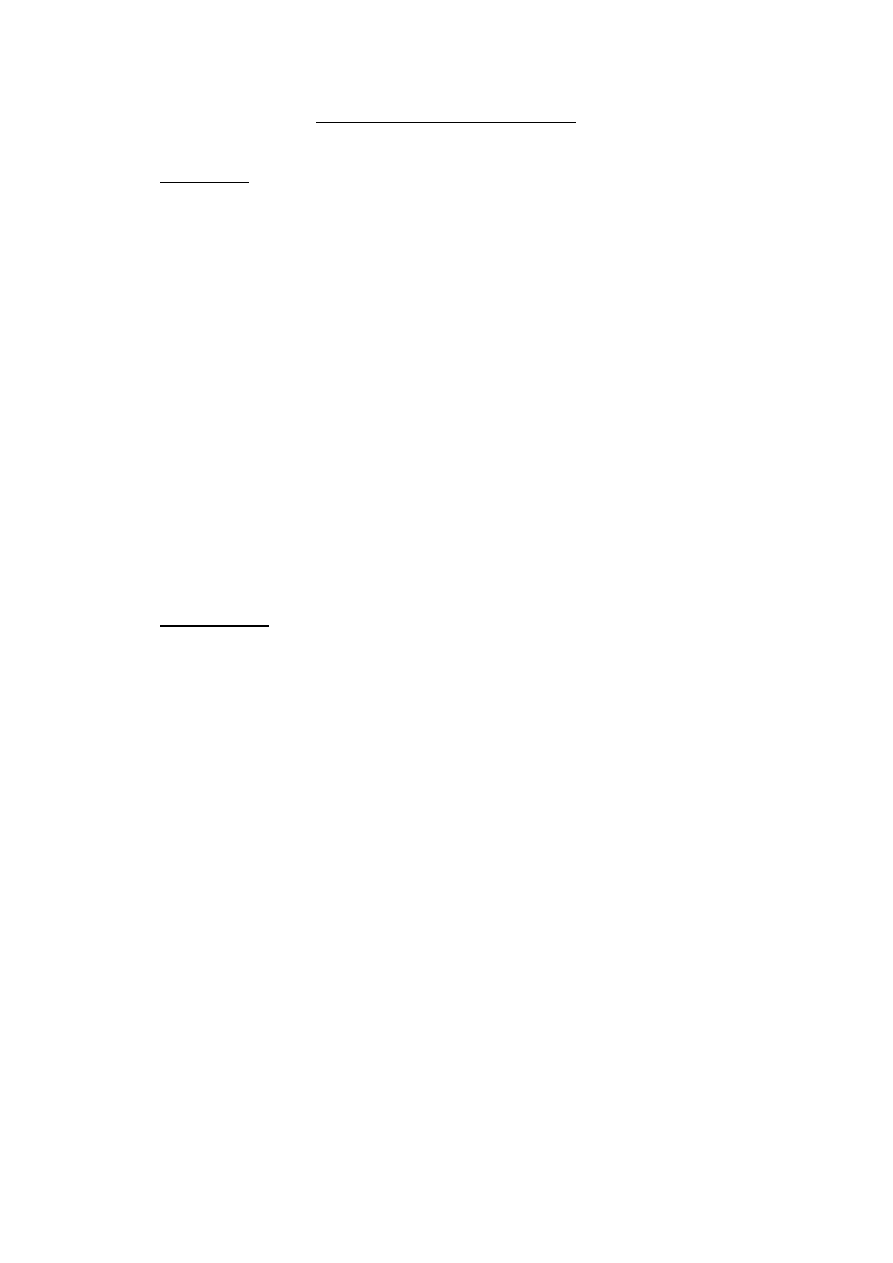
Hazard statyczny i dynamiczny
Hazard – zakłócenia szpilkowe występujące na wyjściu układu kombinacyjnego
podczas procesow przejściowych. Zjawisko występuje wówczas, gdy co najmniej
jeden sygnał jest przesyłany dwoma różnymi drogami prowadzącymi do jednej
bramki. Wyrożniamy hazard statyczny i dynamiczny.
Hazard statyczny – chwilowa zmiana stanu wyjściowego układu występującą przy zmianie
stanu jego wejścia wtedy, gdy wyjście powinno zostać niezmienione. Powstaje na skutek
nieidealnych właściwości przełączających. Dzielimy na:
hazard jedynki – chwilowa zmiana wyjścia 1-0-1 wtedy, gdy wyjście to powinno
zostać niezmienione w stanie 1
hazard zera – chwilowa zmiana wyjścia 0-1-0 wtedy, gdy wyjście to powinno pozostać
niezmienione w stanie 0
Hazard dynamiczny – kilkukrotna zmiana stanu wyjścia przy zmianie stanu wejścia wtedy,
gdy wyjście to powinno zmieniać swój stan tylko jeden raz i w nim pozostać np. przy zmianie
1-0 następuje zmiana 1-0-1-0, lub przy zmianie 0-1 następuje zmiana 0-1-0-1. Powstaje na
skutek nieidealnych właściwości transmisyjnych.
Hazard statyczny można wyeliminować już na etapie projektowanie układu, dzieje się to
kosztem skomplikowania układu. Eliminacja hazardu statycznego powoduje równoczesną
eliminację hazardu dynamicznego. Jedną z metod eliminacji jest wprowadzenie
układu. Likwidacja hazardu może polegać również na wprowadzeniu do układu dodatkowej
grupy (oczywiście nie będzie to już wówczas postać minimalna takiej funkcji), zawierającej
elementy sąsiadujących ze sobą grup.
~S
~R
J
C
K
Q
~Q
Przerzutniki D i JK
Przerzutnik (z ang. flip-flop) jest to podstawowy element pamiętający każdego układu
cyfrowego, przeznaczonego do przechowywania i ewentualnego przetwarzania informacji.
Przerzutnik współtworzy najniższe piętro struktury układu i zdolny jest do zapamiętania
jednego bitu informacji. Grupa czterech lub ośmiu połączonych ze sobą przerzutników
tworzy następne, wyższe piętro - tzw. rejestr, zdolny już do pamiętania jednego bajtu
informacji.
Parametry dynamiczne
Czas narastania
Czas opadania
Czas propagacji
o z L do H
o z H do L
minimalny czas trwania aktywnego poziomu sygnału
Minimalny czas trwania poziomu poprzedzającego i następującego po aktywnym zboczu
sygnału
Maksymalny czas trwania zbocza wyzwalającego
Czas ustalenia
Czas utrzymania
Maksymalna częstotliwość przebiegu zegarowego
Czas martwy
Parametry statyczne
Napięcia poziomów logicznych (na wyjściu i wejściu)
o
dla sygnału L
o
dla sygnału H
Marginesy zakłóceń statycznych dla stanów logicznych
Wydajności prądowe stopni wejściowych i wyjściowych dla stanów L i H
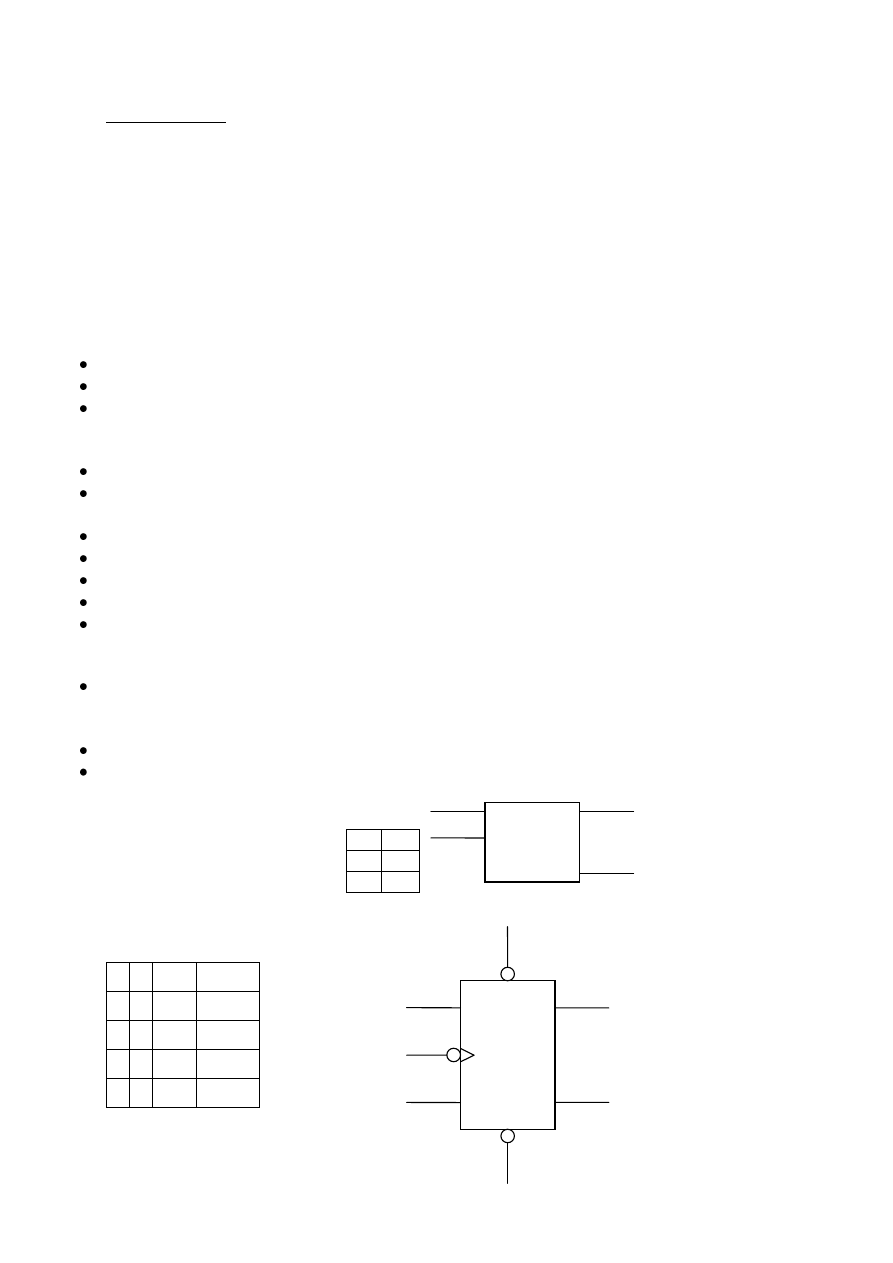
Przerzutnik typu D:
Przerzutnik typu JK:
J K Q(n) Q(n+1)
0 X
0
0
1 X
0
1
X 1
1
0
X 0
1
1
D Q
C
~Q
D
Q
n
0
0
1
1
Koder, dekoder, transkoder
Koder
Definicja: Układ kombinacyjny posiadający n wyjśd i m<=2
n
wejśd. Służy do zamiany kodu „1
z m” na kod o długości n, tak aby każde słowo tworzyło niepowtarzalny kod wyjściowy.
Schemat blokowy:
Dekoder
Definicja: Układ kombinacyjny posiadający n wejśd i m<=2
n
wyjśd. Służy do zamiany kodu o
długości n na kod „1 z m” (odwrotnie do kodera).
Schemat blokowy:
Transkoder to układ cyfrowy o n wejściach oraz k wyjściach (k=2n). Jego działanie polega na
zamianie dowolnego kodu cyfrowego (poza kodem 1zN) na inny, dowolny kod cyfrowy
(również z wyjątkiem kodu 1zN). Typowym przykładem takiego układu jest układ
zamieniający naturalny kod binarny na kod wyświetlacza siedmiosegmentowego.
S1 S0
D0
D1
D2
D3
I3
I2
I1
I0
S1
S0
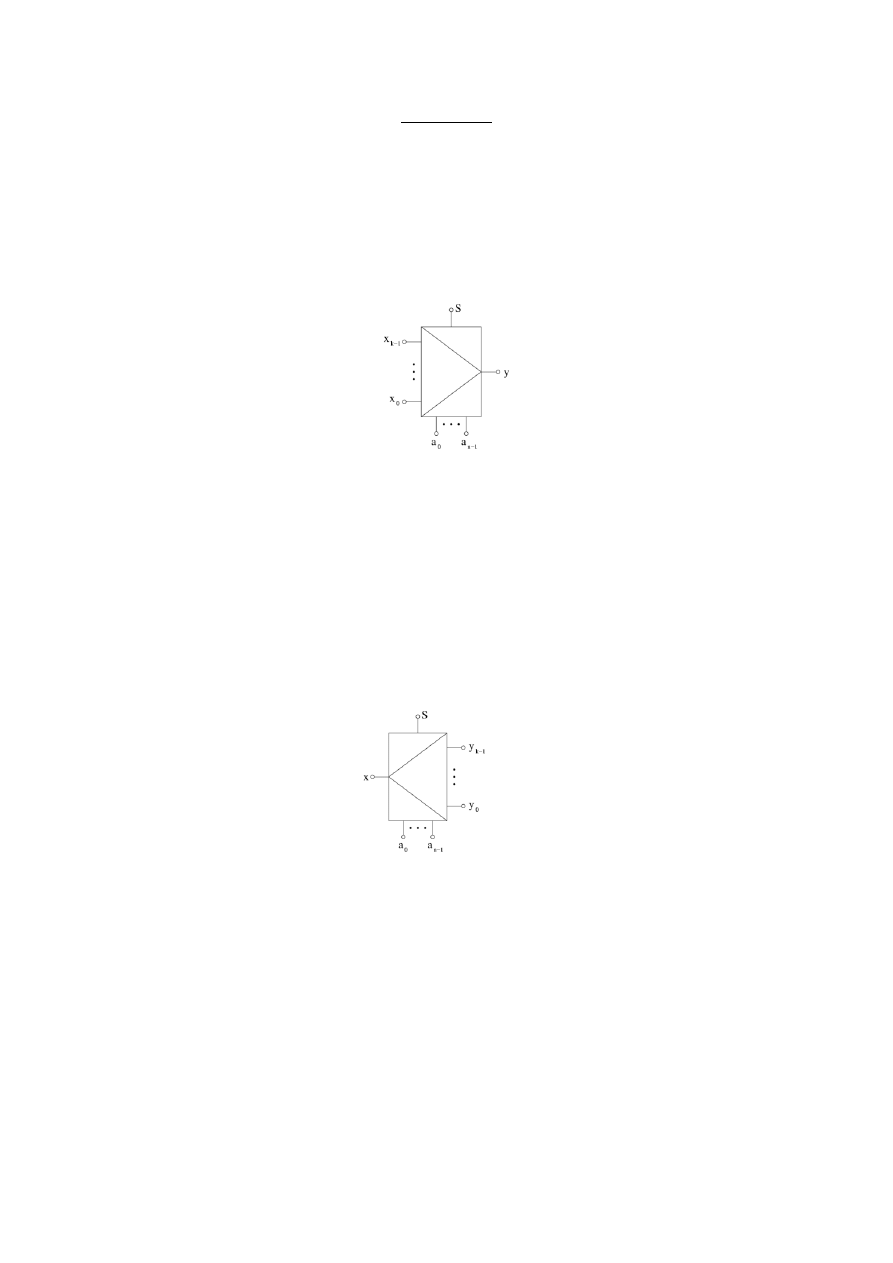
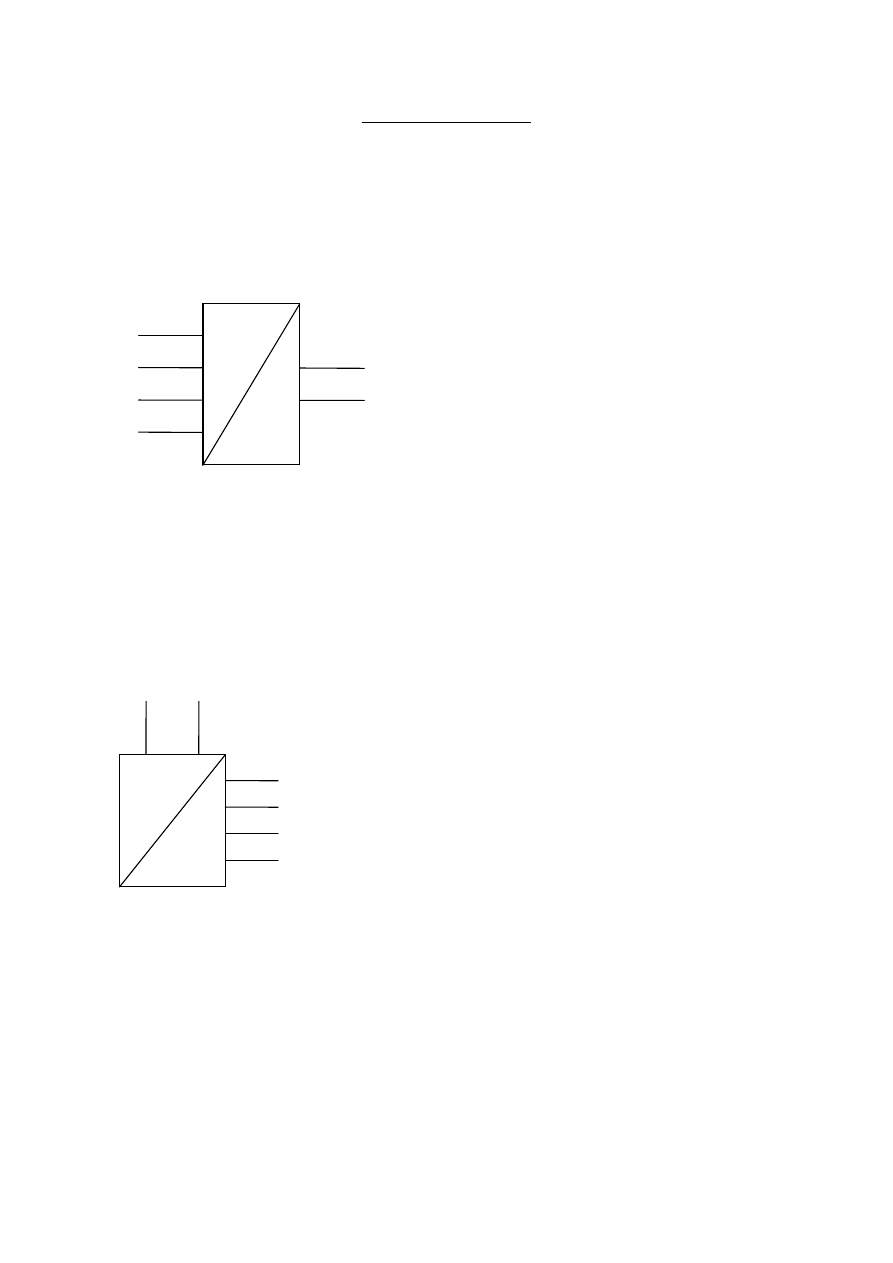
MUX i DMUX
Multiplekser jest układem przełączającym, posiadającym k wejść informacyjnych (zwanych
też wejściami danych), n wejść adresowych (sterujących) (zazwyczaj k=2n) i jedno wyjście y.
Posiada też wejście sterujące działaniem układu oznaczane S (ang. strobe) lub e (ang. enable).
Jego działanie polega na połączeniu jednego z wejść x
i
z wyjściem y. Numer wejścia jest
określany przez podanie jego numeru na linie adresowe A. Jeśli na wejście strobujące
(blokujące) S podane zostanie logiczne zero, to wyjście y przyjmuje określony stan logiczny
(zazwyczaj zero), niezależny od stanu wejść X i A.
Demultiplekser jest układem posiadającym jedno wejście x, n wejść adresowych, oraz k
wyjść (zazwyczaj k=2
n
). Jego działanie polega na połączeniu wejścia x do jednego z wyjść y
i
.
Numer wyjścia jest określany przez podanie jego numeru na linie adresowe a
0
... a
n-1
. Na
pozostałych wyjściach panuje stan zera logicznego. W praktyce spotykane są jedynie
demultipleksery w wyjściach zanegowanych czyli na wybranym wyjściu jest stan a na
wszystkich pozostałych 1 logiczna. Jeśli na wejście strobujące (blokujące) S (ang. strobe)
podane zostanie logiczne zero, to wyjścia y
i
przyjmują określony stan logiczny (zwykle zero),
niezależny ani od stanu wejścia x, ani wejść adresowych.
Rejestry i liczniki
Rejestrem nazywamy układ służący do przechowywania informacji w postaci bitów. Na
każdej pozycji rejestru przechowywany jest jeden bit informacji.
Ze względu na sposób wprowadzania i wyprowadzania informacji dzielimy rejestry na :
Szeregowe - umożliwiające szeregowe wprowadzenie i wyprowadzenie danych (tzn.
bit po bicie), są to tak zwane rejestry SISO (Serial In Serial Out)
Równoległe - umożliwiające równoległe wprowadzenie i wyprowadzenie informacji
jednocześnie do wszystkich pozycji rejestru, PIPO (Parallel In Parallel Out)
Szeregowo-równoległe - umożliwiające szeregowe wprowadzenie i równoległe
wyprowadzenie informacji, SIPO (Serial In Parallel Out)
Równoległo–szeregowe - umożliwiające równolegle wprowadzenie i szeregowe
wyprowadzenie informacji, PISO (Parallel In Serial Out)
uniwersalne, umożliwiające wprowadzenie i wyprowadzenie informacji zarówno w
sposób równoległy, jak i szeregowy.
Rejestry można podzielić także na asynchroniczne i synchroniczne. Jednakże najczęściej
stosowane są rejestry synchroniczne.
Parametrami charakteryzującymi rejestr są:
Długość rejestru, równa liczbie przerzutników N
Pojemność rejestru, równa 2
N
Szybkość rejestru; w przypadku rejestru równoległego będzie to czas wprowadzania
lub wyprowadzania informacji, natomiast w przypadku rejestru szeregowego
maksymalna możliwa częstotliwość impulsów przesuwających, przy której nie
następuje zniekształcenie informacji.
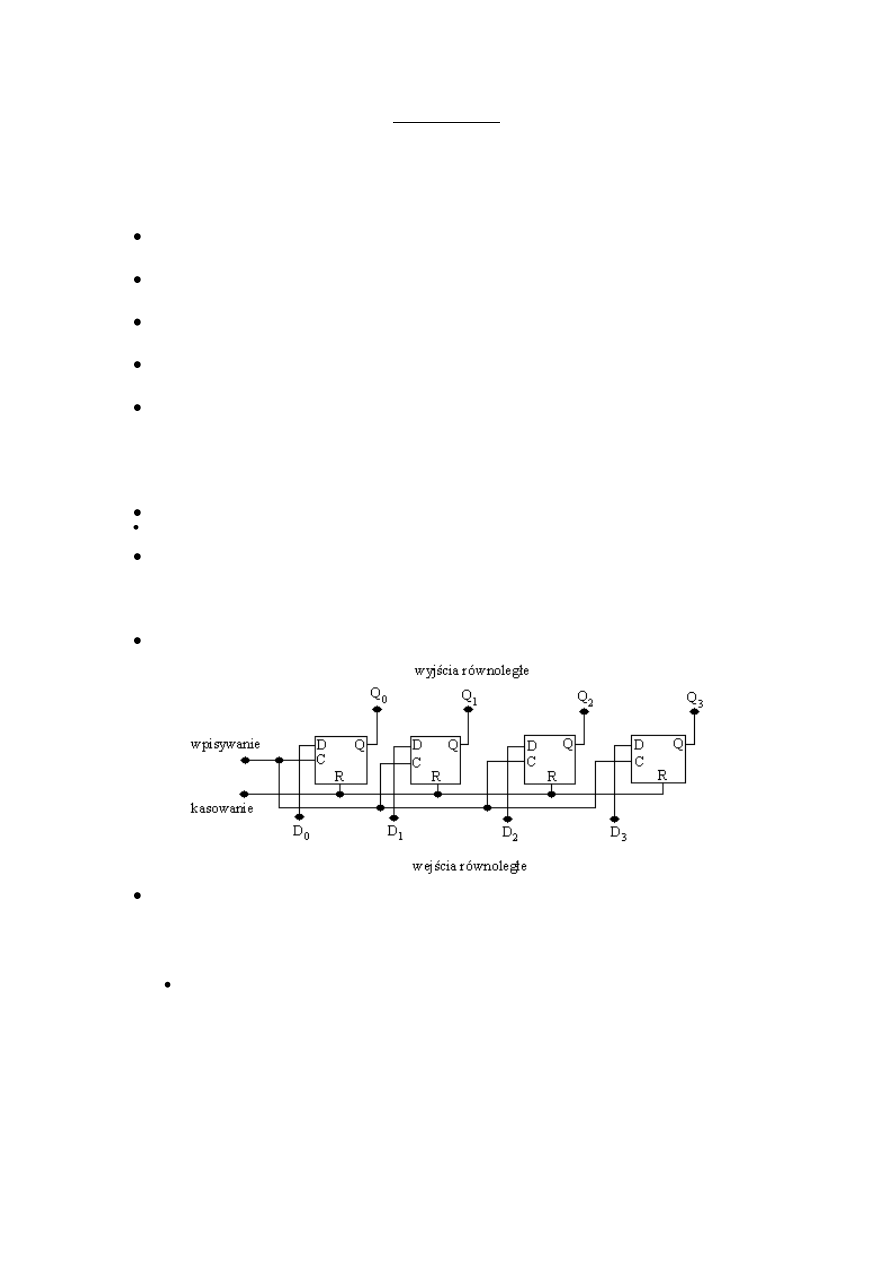
Rejestr równoległy 4 - bitowy
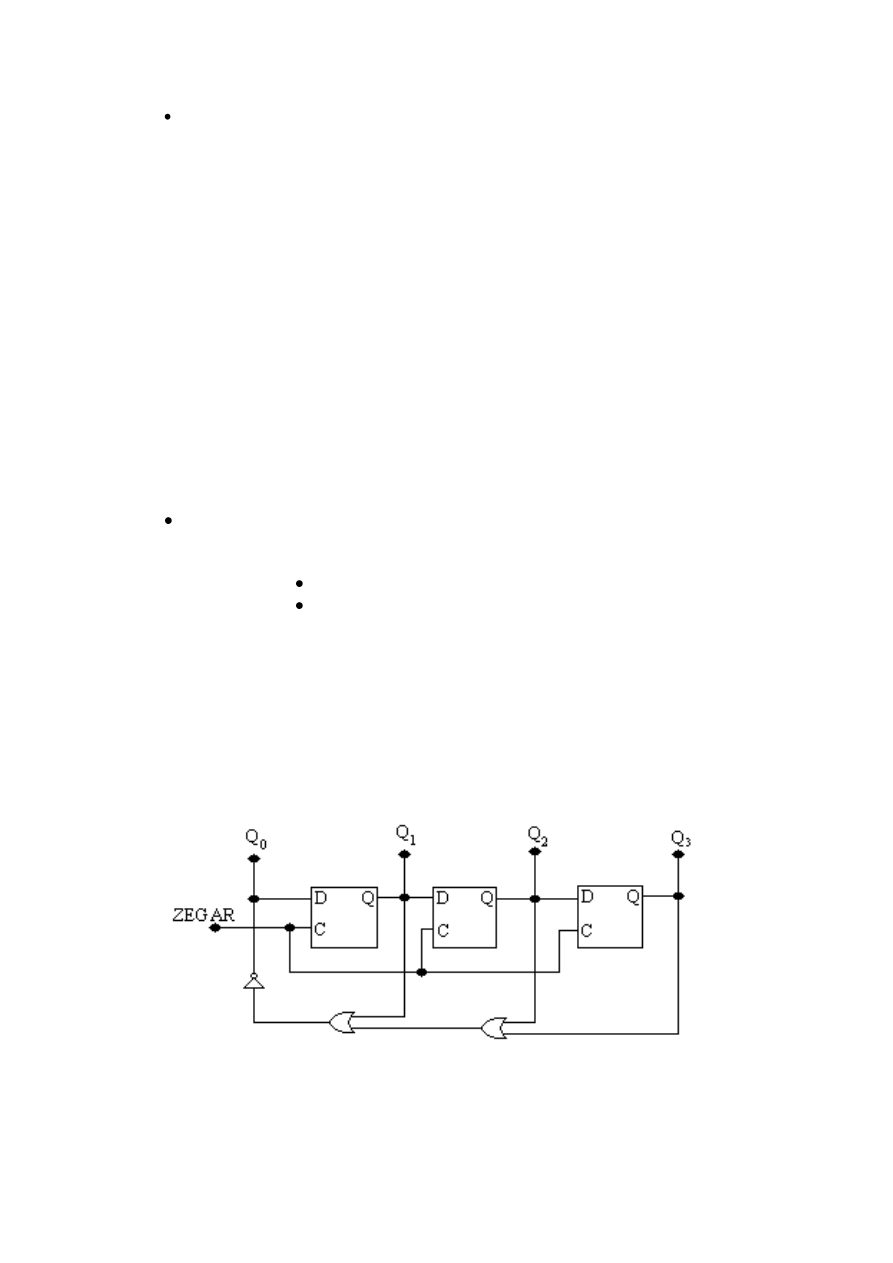
Rejestr przesuwający z przerzutników JK
Definicja
Układ zliczający występowanie sygnału zegarowego.
Parametry
o Opisowe
Stan licznika
Stan początkowy
Cykl
Pojemność
Kierunek zliczania
o Statyczne
Maksymalny prąd wejściowy
Maksymalne napięcie wejściowe
Napięcia poziomów logicznych na wyjściu i wejściu
Moc strat
Minimalne napięcie wejściowe
Wydajności prądowe stopni wejściowych i wyjściowych
Marginesy zakłóceń statycznych dla stanów logicznych
o Dynamiczne
Czas narastania
Czas opadania
Czasy propagacji z L do H i z H do L
Czas ustalenia
Czas utrzymania
Maksymalna częstotliwość przebiegu zegarowego
Klasyfikacja
o I rodzaj klasyfikacji:
jednokierunkowe
Zliczające w tył
Zliczające w przód
Dwukierunkowe (rewersyjne, można przestawiać)
o II rodzaj klasyfikacji:
Szeregowe (asynchroniczne)
Równoległe (synchroniczne)
Licznik pierścieniowy samokorygujący

Układy arytmetyczne
Półsumator jest układem kombinacyjnym o dwóch wejściach A i B oraz dwóch wyjściach : S - sumy i C -
przeniesienia. Z tabelki wynika że:
S = AxorB oraz C = AB
Sumator
Ze względu na sposób wykonywania działao na kolejnych pozycjach
liczb wielocyfrowych stosowane są :
a) sumatory równoległe
b) sumatory szeregowe
Wśród sumatorów równoległych można wyróżnid :
a) sumatory z przeniesieniami równoległymi
b) sumatory z przeniesieniami szeregowymi
Sumator szeregowy
W sumatorze szeregowym dodawane liczby są wprowadzane do sumatora bit po bicie,
poczynając od bitu najmniej znaczącego. W układzie takim występuje koniecznośd
odróżnienia jednakowych stanów wejśd. Jest to typowy układ synchroniczny.
Sumator równoległy
Sumator równoległy z przeniesieniami szeregowymi, zwany inaczej sumatorem
kaskadowym jest najprostszym typem sumatora równoległego.
Dla realizacji dodawania liczb dodatnich sumator pozycji najmniej znaczącej może
byd zastąpiony półsumatorem
Sposoby reprezentacji układów sekwencyjnych:
Opis słowny – opisanie zasady działania układu, jakie spełnia funkcje, dla jakich wartości na wejściu
jakie wartości są przypisywane na wyjściu układu
Wykres czasowy – wykres (zero-jedynkowy) ilustrujący zależnośd wyjścia układu od stanów wejśd
Opis pełny – wymienienie wszystkich 5ciu elementów opisujących <A,X,Y,δ,λ> (grafy przejśd i wyjśd
oraz tablice przejśd i wyjśd)
U
kłady asynchroniczne
• Brak wejścia sterującego (synchronizującego, zegarowego)
• Natychmiastowa reakcja na zmiany stanu X (zmiana stanu A lub Y jedynie po zmianie stanu
X)
• Każdy stan A
t
+ ustala się po niezerowym opoźnieniu (czas propagacji)
• Opoźnienia ti sygnałow Qi (i=1, 2, ..., k) są niejednakowe
• Zmiana stanu X -> 1 lub więcej stanow niestabilnych, po ktorych powinien wystąpić stan
stabilny
Układy asynchroniczne statyczne – reakcja na stan wejść
Układy asynchroniczne dynamiczne – reakcja na zmianę stanu
Układy synchroniczne:
• Zmaiany stanu X tylko w określonych, dyskretnych chwilach czasu określanych przez
zewnętrzny sygnał okresowy niewchodzący do wektora X (sygnał sterujący, synchronizujący,
zegarowy, taktujący)
• Kolejny stan może być oznaczony liczbą naturalną (zamiast t)
A
t+1
= d(A
t
, X
t
); A
t
= d(A
t-1
, X
t-1
); A’= d(A, X)
• Brak stanow niestabilnych: T
m
= < T
0
Zamiast oznaczenia t używamy umownego n dla chwil t
n
, t
n+1
-> A
n
, A
n+1
Układy synchroniczne autonomiczne – brak wejść X
Automaty
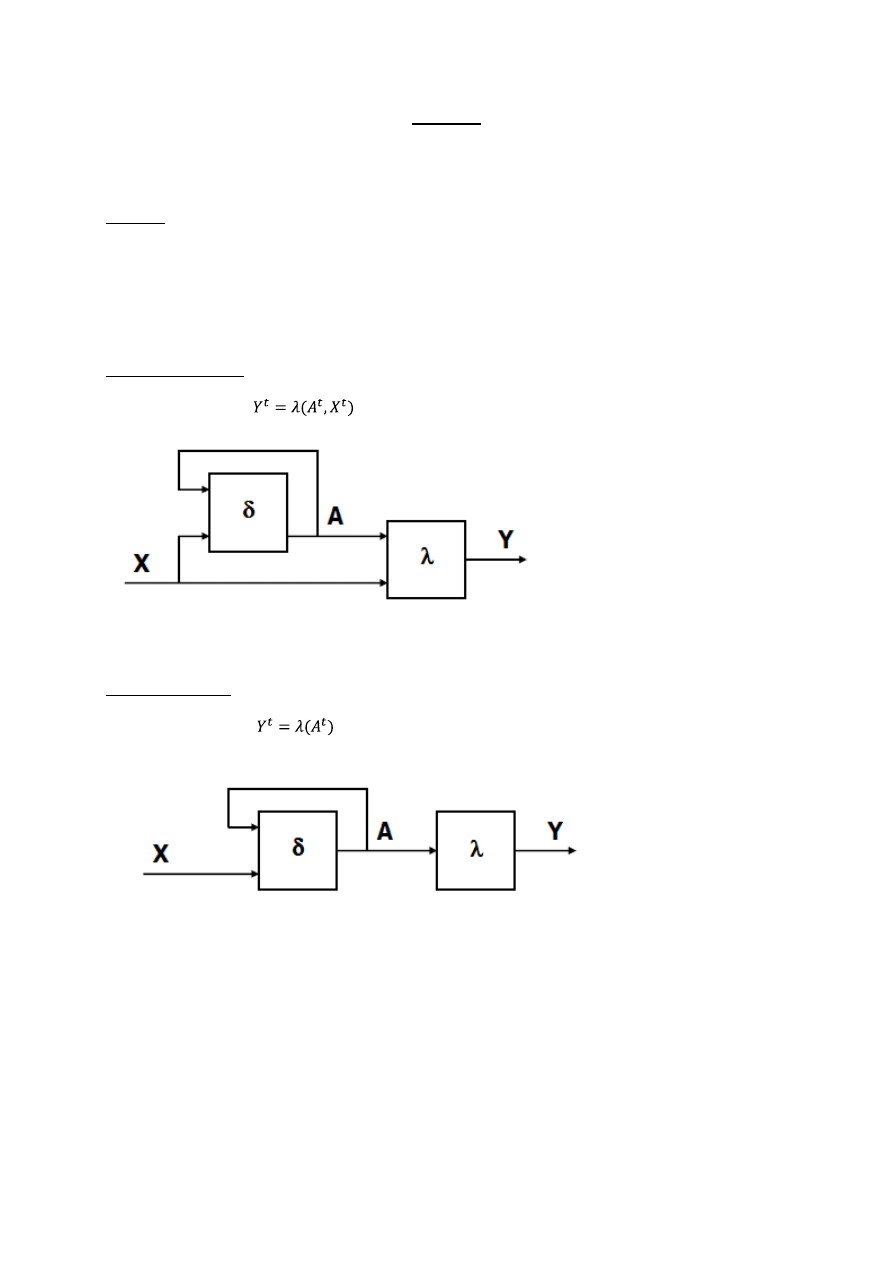
Jako δ oznaczamy funkcję przejśd (stany opóźnione o czas τ), natomiast jako λ oznaczamy funkcję
wyjśd (stany na faktycznym wyjściu układu).
Automat – model matematyczny układu sekwencyjnego opisywany przez <A,X,Y,δ,λ>
A – wektor stanów wewnętrznych w odniesieniu do stanów elementów pamięciowych
X – wektor danych (chyba)
Automat Mealy’ego:
Określony funkcją:
Automat Moore’a:
Określony funkcją:
Definicje automatów
Automat skooczony – automat, w którym zbiory A,X,Y są skooczone
Automat deterministyczny – jeśli λ i δ są funkcjami
Automat zupełny – jeśli dla wszystkich par (A,X) ze zbioru (A×X) istnieją określone wartości funkcji λ i
δ
Automat niezupełny – jeśli istnieje chodby jedna para, która nie ma określonej wartości funkcji λ i δ
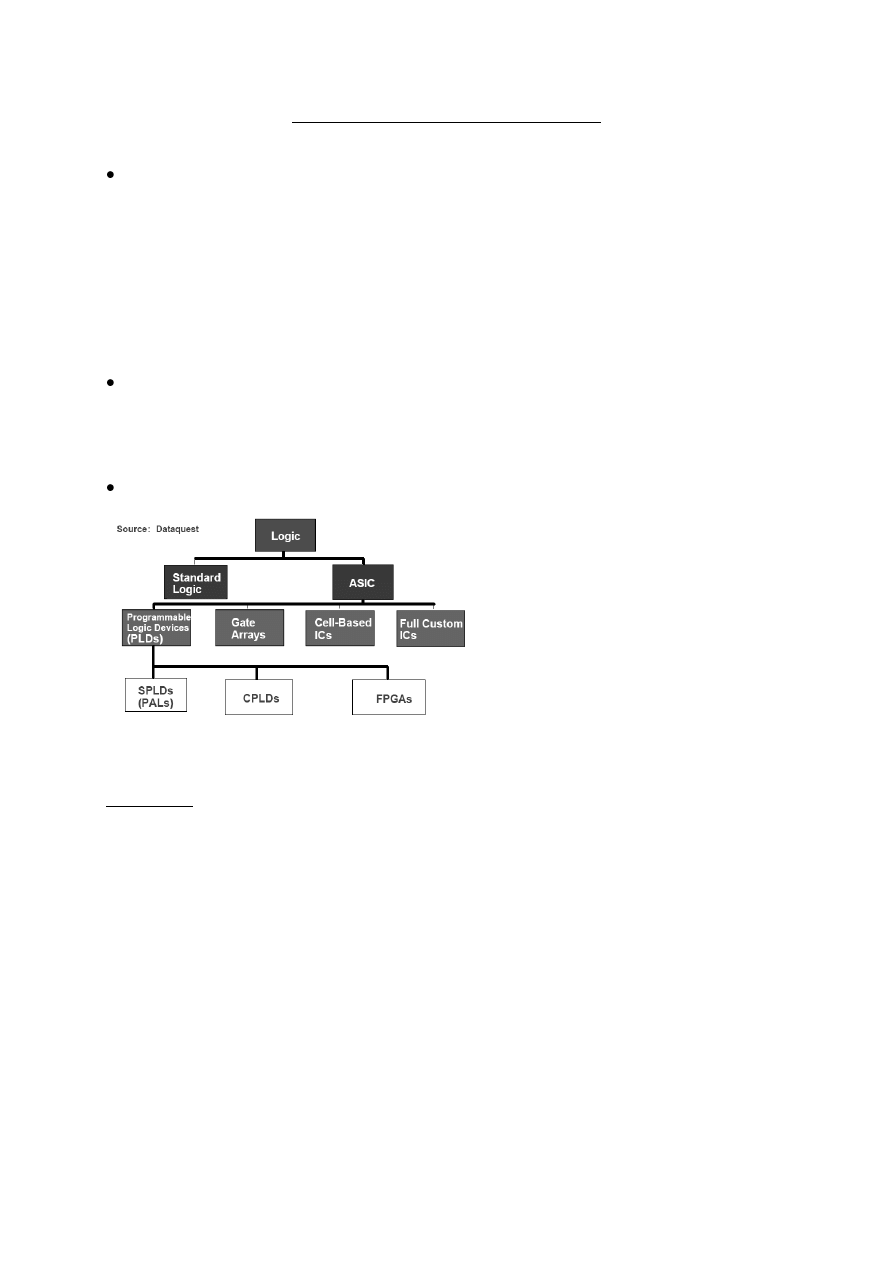
Układy reprogramowalne (PLA PAL CPLD GAL)
Programowalne układy cyfrowe(PLD):
SPLD (Simple Programmable Logic Device) – proste układy programowalne
o PLA (Programmable Logic Array)
o PAL (Programmable Array Logic) (Technologia bipolarna. Jednokrotne
programowanie przez przepalenia „fuse”)
o GAL (Generic Array Logic)
Są to układy o najskromniejszych możliwościach logicznych, a więc i najtańsze ze
wszystkich układów programowalnych. Niemniej jednak ich zasoby logiczne są spore,
zawierają bowiem typowo od 4 do 22 makrokomórek logicznych o dwupoziomowej
strukturze logicznej i mogą zwykle zastąpić kilka standardowych układów scalonych rodziny
74xx.
CPLD (Complex Programmable Logic Devices) – złożone układy programowalne
Układy CPLD są koncepcyjnie podobne do układów SPLD, lecz są bardziej złożone –
mają większe zasoby logiczne i możliwości funkcjonalne. Ich architektura ma strukturę
hierarchiczną opartą na makrokomórkach logicznych, których zawierają od kilkudziesięciu
do kilkuset.
FPGA (Field Programmable Gate Array) – programowalne matryce bramkowe
Rozkodowanie symbolu dla układów typu PAL:
PAL xx Y z
xx - liczba wejść
Y - L-logika ujemna
H - logika dodatnia
C - wyjścia komplementarne
R - wersja z przerzutnikami synchronicznymi
RA - wersja z przerzutnikami asynchronicznymi
X, A - wersja z układami arytmetycznymi
S - wersja z dzielonymi iloczynami
z - liczba wyjść (kombinacyjnych lub rejestrowych)
Klasyfikacja układów scalonych
Ze względu na sposób przetwarzania informacji:
układy sekwencyjne – w których stan wyjść zależy od stanu wejść x oraz od
poprzedniego stanu
układy kombinacyjne – w których sygnały wyjściowe zmieniają się w chwili zmian
sygnałów wejściowych
Ze względu na technologie w jakiej wykonano bramki logiczne:
bipolarne:
o TTL (ang. Transistor-Transistor Logic)
o ECL (ang. Emitter Coupled Logic)
o
I²L (ang. Integrated Injection Logic)
unipolarne:
o NMOS i PMOS
o CMOS (ang. Complementary MOS)
Obudowy
Funkcje obudowy:
Ochrona mechaniczna i fizykochemiczna (zewnętrzna warstwa nie przepuszcza,
zalanie elementów materiałem nie pozwala na ich przesuwanie się)
Ułatwianie montażu oraz rozpraszania ciepła (metalowy szkielet oddaje dobrze ciepło,
np. nóżki pozwalają na łączenie automatyczne oraz umiejscowienie w wybranym
miejscu)
Rodzaje obudów:
Plastykowe
o Tanie
o Odporne mechanicznie
Ceramiczne
o Bdb. hermetyzacja
o
Duża odporność chemiczna
Podział obudów ze względu na montaż:
Do montażu wgłębnego (piny)
o DIP
o SDIP
o HDIP
o
…
Do montażu powierzchniowego (styki płaskie, styki sprężynowe)
o SOP
o SOJ
o SSOP
o PLCC
o
…
VHDL
Very High Speed Integrated Circuits Hardware Description Language
Jest to bardzo popularny język opisu sprzętu używany w komputerowym
projektowaniu układów cyfrowych typu FPGA i ASIC.
Dlaczego VHDL?
Niezależna od technologii specyfikacja projektu
Możliwość współpracy pomiędzy różnymi producentami
Łatwość zmian funkcjonalnych
Automatyzacja projektowania (redukcja czasu i kosztów)
Ułatwienie weryfikacji funkcjonalnej oraz implementacji
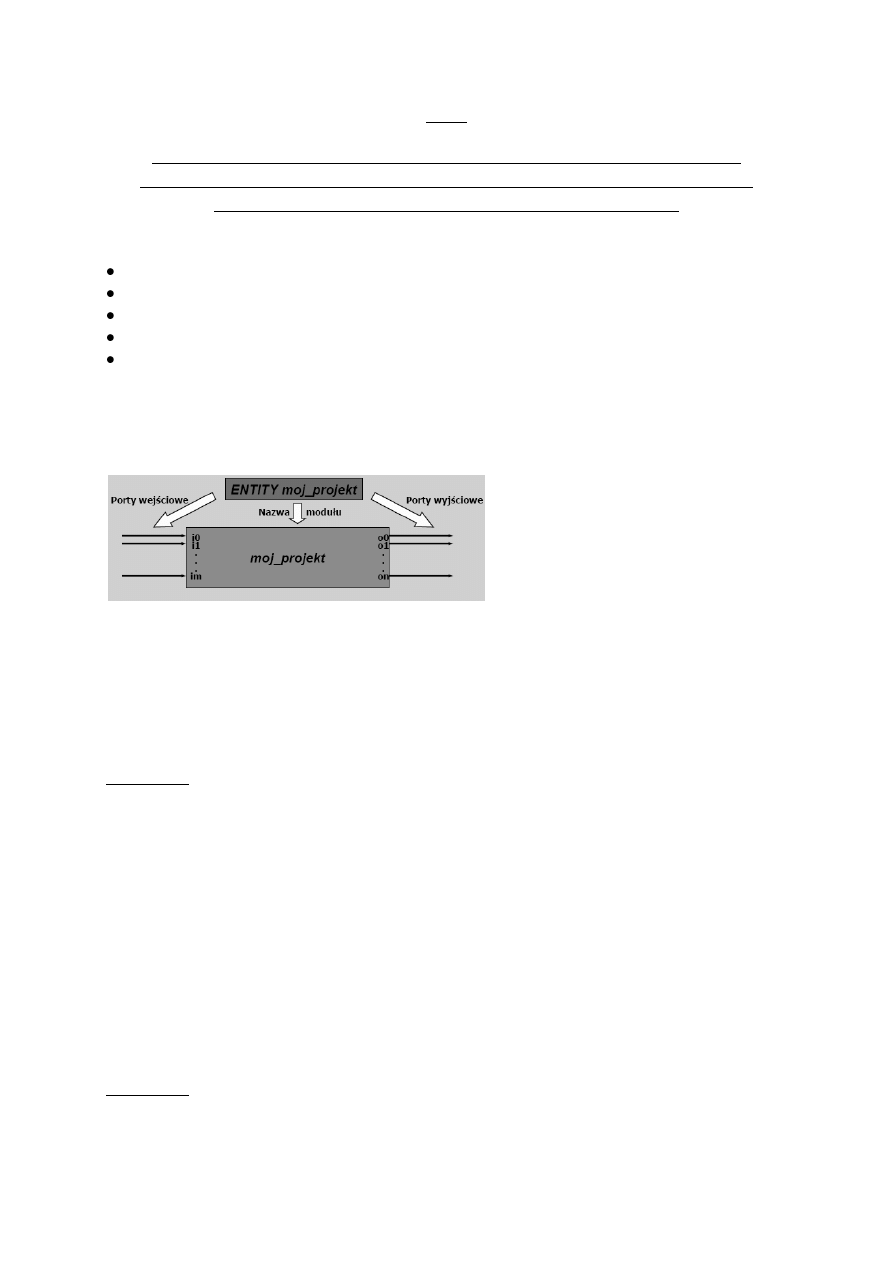
Entity – jednostka projektowa
Każdy moduł projektu w VHDL musi zawierać jednostkę projektową entity. Jednostka
projektowa (entity) w VHDL oznacza konstrukcję służącą do specyfikacji interfejsu do
komunikacji ze światem zewnętrznym.
Każda jednostka projektowa (entity) w projekcie musi posiadać unikalną nazwę. Wejścia i
wyjścia w projekcie noszą nazwę portów (PORTS).
Typy portów:
in – port wejściowy
out – port wyjściowy
inout – port dwukierunkowy, wykorzystywany w sytuacji, gdy dane przekazywane są przez
moduł bez ich zmiany
Deklaracja:
entity moj_projekt is
port(
i0, i1, i2, i3: in bit;
o0, o1, o2: out bit
);
end moj_projekt;
Generic - parametry ogólne
Wykorzystywana do parametryzacji projektu – jednostki projektowej. Składa się z ogólnej
listy interfejsu (generic interface list), w której zdefiniowane są parametry jednostki
projektowej (formal generic constants). Elementy składowe ogólnej listy interfejsu mogą być
jedynie stałymi rodzaju in (rodzaj jest pomijany w części deklaracyjnej).
Deklaracja:
entity projekt_testowy is
generic(N: integer);
port(
a_in, b_in: in bit_vector(N-1 downto 0);
stat: in bit;
y_out: out bit_vector (N-1 downto 0);
);
end projekt_testowy;
Deklaracja generic jest widoczna dla wszystkich architektur opartych na danej jednostce
projektowej (entity).
Architecture – implementacja jednostki projektowej
Ciało architektury (architecture) definiuje sposób działania jednostki projektowej od pobrania
danych z portów wejściowych do wygenerowania danych na portach wyjściowych.
Istnieje możliwość przyporządkowania wielu architektur do jednej jednostki projektowej:
cecha użyteczna w podejściu top down – dedykowana architektura opisuje kolejne stopnie
redefinicji na różnych poziomach abstrakcji
potrzeba opisu różnych wariantów tego samego modułu
Składnia:
architecture behaw of projekt_testowy is
signal a, b, c: bit;
begin
suma <= a XOR b;
end behaw;
Typy danych w VHDLu
Ścisła kontrola typow danych:
Typy wbudowane:
wyliczeniowe
całkowite
zmiennoprzecinkowe
fizyczne
tablicowe
Typy wyliczeniowe:
definiowane przez użytkownika, określające wyższy poziom abstrakcji
PRZYKŁAD:
Przy modelowaniu jednostki sterującej procesora zamiast kodów binarnych określających
jego stan wygodniej (czytelniej) jest stosować nazwy opisowe:
type stan_proc is (idle, add, store, compare, move, wait);
. . . . . . . . . . . . .
variable operacja:stan_proc := wait;
Typ boolowski:
wyliczeniowy typ predefiniowany
wykorzystywany do reprezentacji wartości zmiennych warunkowych sterujących
wykonaniem modeli behawioralnych
DEFINICJA:
type boolean is (false, true);
Zastosowanie:
relacje równości i nierówności (porównanie operandów tego samego typu daje w wyniku
wartość boolowską)
relacje mniejszości i większości – ostre i nieostre (stosowane do typów porządkowych –
całkowitych i znakowych)
Typ bitowy
Typ predefiniowany VHDL
Najczęściej używany typ danych
Typ syntezowalny
DEFINICJA:
type bit is (‘0’, ‘1’);
Konsekwencje:
Symbole „0” i „1” należą do typu bit oraz character
Operacje logiczne analogiczne do typu boolean
‘0’ or ‘1’ = ‘1’; -- poprawnie
‘0’ xor false – błąd
Typ bitowy a boolowski
Wartości boolowskie stosowane są do modelowania abstrakcyjnych uwarunkowań
Typ bitowy reprezentuje sprzętowy poziom logiczny
Operacje logiczne na typie bitowym wykorzystują logikę dodatnią
Typ bit_vector
Typ predefiniowany
W VHDL zdefiniowany jako tablica bitów
Wykorzystywany do reprezentacji magistral – uproszczona notacja dla funkcji logicznych
na magistralach (np. operacja XOR wykonywana na zawartości 8-bitowych rejestrów
zamiast ośmiu instrukcji bitowych)
Typ znakowy
Typ wyliczeniowy predefiniowany VHDL
Zdefiniowany w paczce (package) STANDARD
Zapisujemy w apostrofach
Każdy znak reprezentuje liczbę 8 bitową (format ASCII), syntezowalną do magistrali 8-
bitowej
DEFINICJA:
type character is (NUL, SOH, ESC, FSP (w chuj innych kodów…), ‘!’, ‘T’, ‘u’, ‘~’, DEL
(etc – każdy chyba pojął) )
PRZYKŁAD:
variable znak: character;
znak:=‘T’;
Typ całkowity (integer)
typ syntezowalny z ograniczeniami
automatyczna synteza -> zbyt szerokie magistrale
alternatywa: tablice bitów (bit_vector)
Typ zmiennoprzecinkowy (real)
!!!nie syntezowalny!!!
wykorzystywany w symulacjach
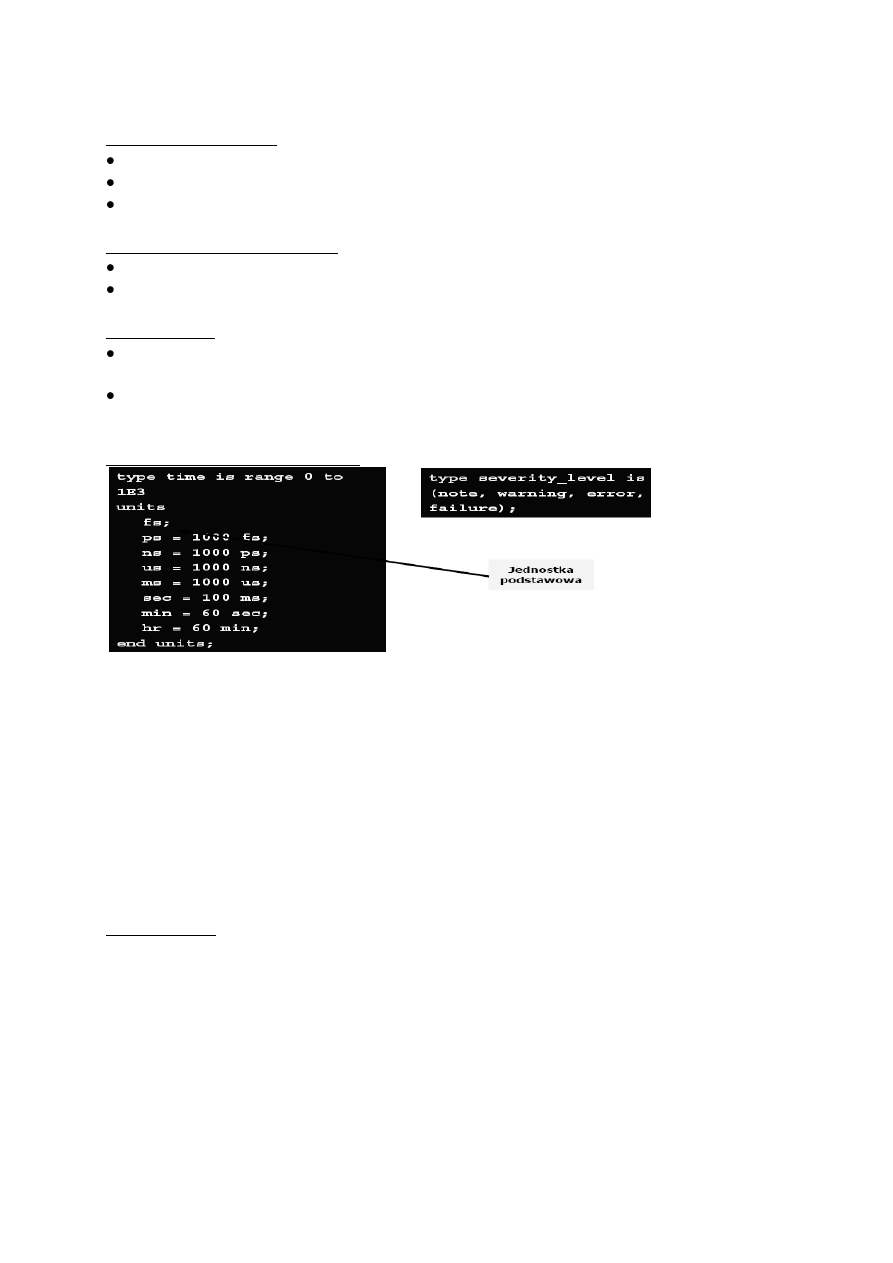
Typy fizyczne:
Reprezentacja wielkości występujących w świecie fizycznym (np. masa, długość, czas,
prąd itp.)
Definicja typu fizycznego zawiera podstawową jednostkę miary i może zawierać wtórne
jednostki miary (powstałe przez całkowite pomnożenie jednostki podstawowej)
Typy TIME i SEVERITY_LEVEL
Przykład zastosowania:
entity tik is
port(clk: out bit);
end tik;
architecture tak of tik is
begin
process
begin
clk <= ‘0’;
wait for 5ns; -- instrukcja nie syntezowalna
clk <= ‘1’;
wait for 5ns;
end process;
end tak;
Podsumowanie
• typ całkowity: INTEGER
• podtypy całkowite: NATURAL, POSITIVE
• typ zmiennoprzecinkowy: REAL
• typ fizyczny: TIME
• typy tablicowe: STRING, BIT_VECTOR
• typy wyliczeniowe: BIT, BOOLEAN, SEVERITY_LEVEL,
CHARACTER
Sposoby projektowania systemów
Top-down:
Idea całości projektu
Dekompozycja na mniejsze bloki
Projekt i rafinacja podbloków
Łączenie bloków w całość
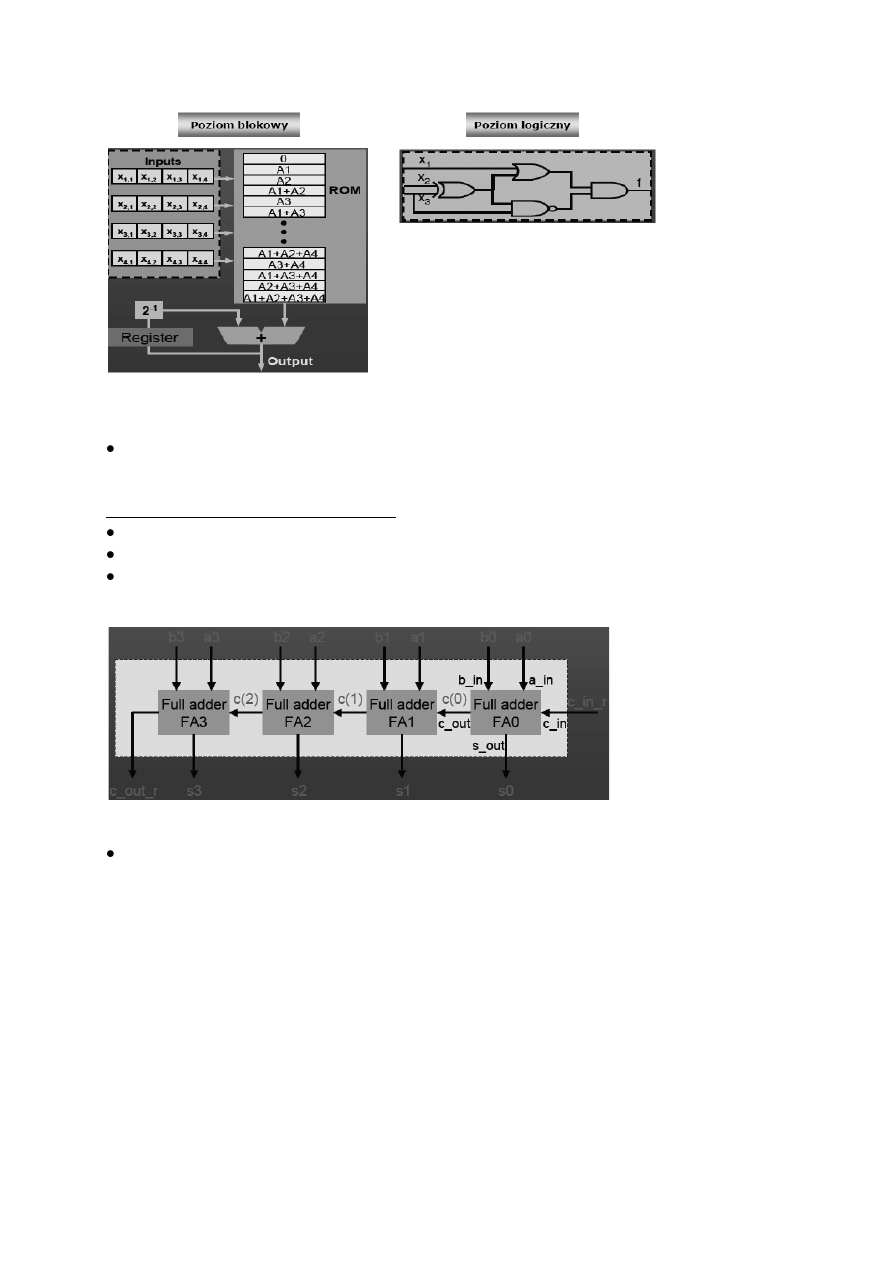
PRZYKŁAD (sumator kaskadowy):
zdefiniowanie operacji sumatora kaskadowego
określenie projektu za pomocą szeregu pełnych sumatorów
zdefiniowanie pełnego sumatora za pomocą półsumatora
skonstruowanie pełnego sumatora
połączenie wszystkich bloków
Down-top (bottom-up)
Projektowanie najmniejszych elementów
Łączenie komponentów w bloki funkcjonalne
Powtarzanie procesu łączenia
PRZYKŁAD (sumator kaskadowy)
Zdefiniowanie, zaprojektowanie, symulacja oraz synteza pełnego sumatora za pomocą
półsumatora
Skonstruowanie pełnego sumatora poprzez połączenie dwóch półsumatorów
Zaprojektowanie sumatora n-bitowego dzięki szeregowemu połączeniu n pełnych
sumatorów
Top-down i Bottom-up
Wybór sposobu projektowania zależy od rozmiaru i złożoności projektu, dostępnych zasobów
oraz doświadczenia i preferencji projektanta
Wybór stylu top-down:
duże i złożone projekty z małym wykorzystaniem IP core
we wczesnej fazie projektowej brak możliwości dekompozycji projektu na mniejsze
elementy
brak informacji dotyczącej komponentów na poziomie strukturalnym
Kod strukturalny
Możliwość stworzenia hierarchicznego projektu za pomocą zbioru
połączonych komponentów
Komponenty (bloki uprzednio zweryfikowane i zsyntezowane) mogą
być umieszczone w bibliotekach
Uproszczenie procesu rafinacji, uruchamiania i usuwania bledów
(mniejszy układ, łatwiejsze uruchamianie)
Tworzenie komponentów:
Mniejsze komponenty
Wyrażenia logiczne
Opis funkcjonalny (behawioralny)
Rodzaje komponentów na różnych poziomach abstrakcji (netlista, RTL)
Reprezentacja strukturalna w VHDL
Implementacja jednostki projektowej za pomocą specyfikacji
połączeń podsystemów
o
Ciało architektury złożone tylko z połączonych podsystemów
Elementy strukturalne ciała architektury
deklaracja sygnałów
deklaracja komponentów
konkretyzacja komponentów
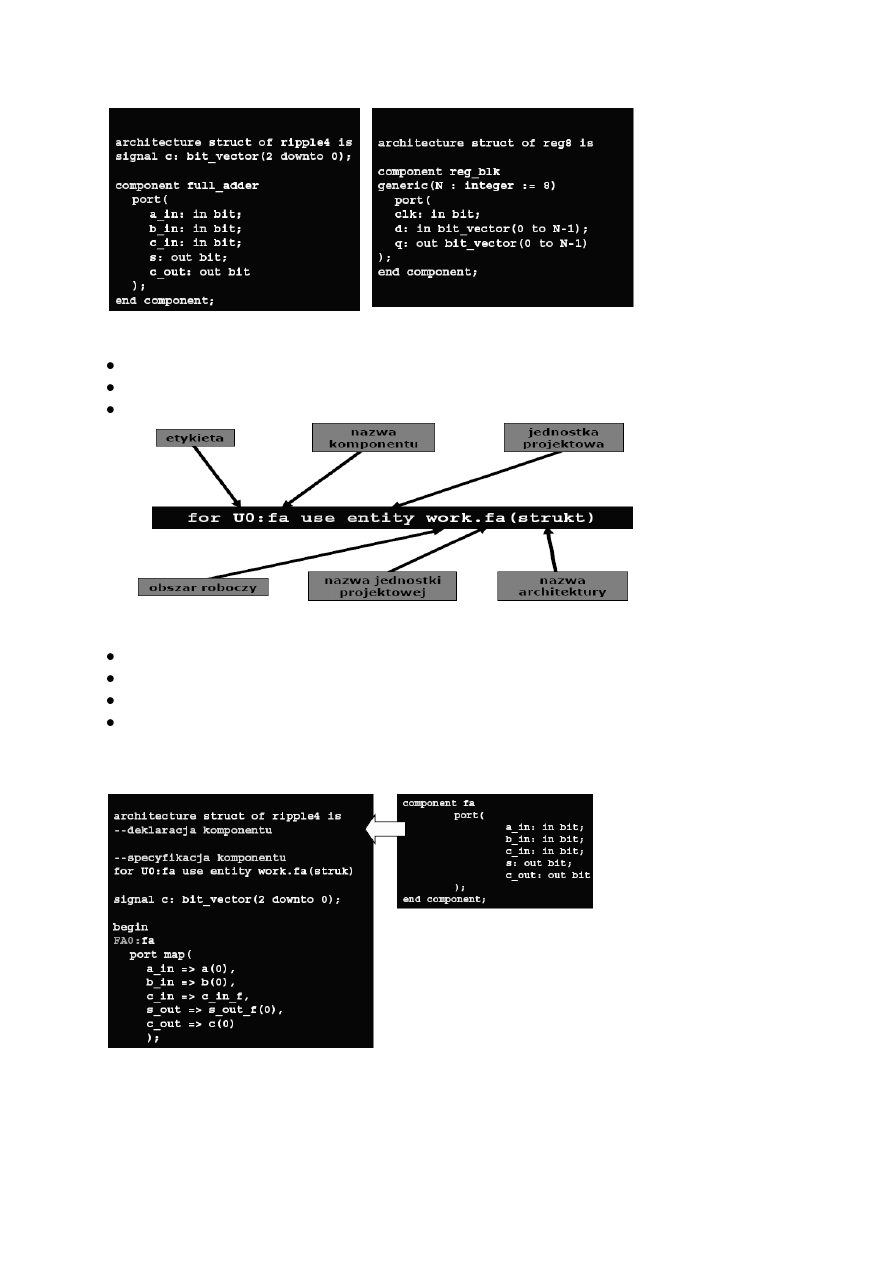
Przykład: 4-bitowy sumator kaskadowy:
Deklaracja komponentów (component)
Deklaracja komponentów – specyfikacja zewnętrznego interfejsu pod kątem stałych
(generic) oraz portów (port)
o
brak wymagania implementacji komponentu, konieczność znajomości jego
interfejsu
Deklaracja komponentu wykorzystuje nazwę, którą posiada jednostka projektowa definiująca
komponent, a także taką samą deklarację portów.
Istnienie wielu komponentów o tej samej nazwie -> konieczność specyfikacji komponentu do
wykorzystania.
Specyfikacja komponentów i synteza
Specyfikacja komponentów tylko do celów symulacji
Narzędzia syntezy ignorują specyfikację komponentów
Do syntezy projektu używane są najpóźniej skompilowane komponenty
Konkretyzacja komponentów
deklaracja komponentu – definicja rodzaju modułu
konkretyzacja – wykorzystanie modułu w projekcie
deklaracja komponentu w ciele architektury wraz z deklaracją sygnału (przed begin)
konkretyzacja komponentu w ciele architektury (po begin)
Uwaga: komponenty mogą być opisane strukturalnie lub behawioralnie w
oddzielnych jednostkach projektowych, traktując je jako oddzielne projekty
Testbench
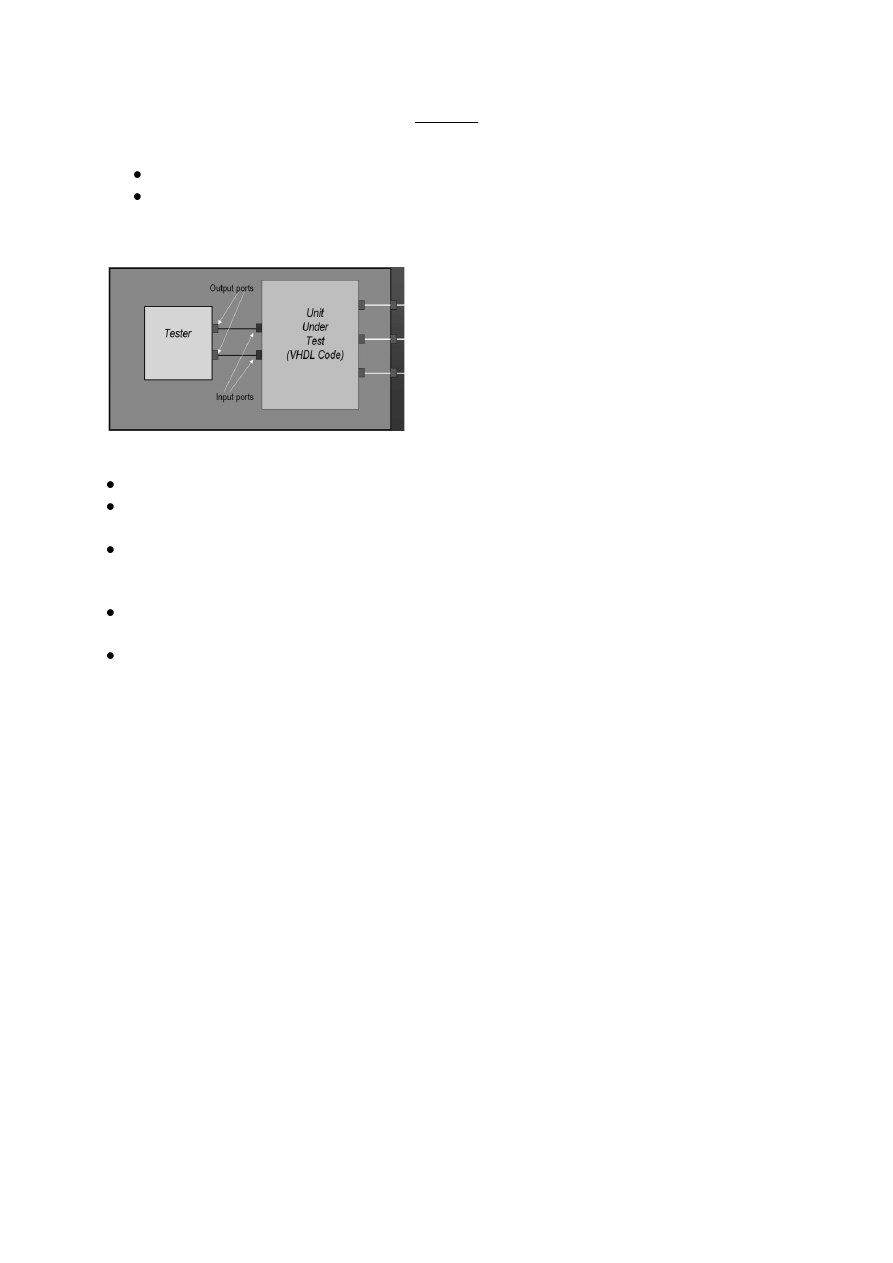
Składa się z dwóch bloków:
Nadrzędnego modułu projektowanego bloku VHDL
jednostki projektowej wykorzystywanej do generowania wymuszeń (łącznie z
zegarem), odczytu wektorów testowych z pliku zewnętrznego, prezentacji wyników w
oknie symulatora lub zapis do pliku
Główne zastosowania konstrukcji testbench:
Generowanie wymuszeń do celów symulacji
Doprowadzenie wektorów testowych do układu podawanego testowaniu (CUT – circuit
under test) oraz pobieranie z niego odpowiedzi
Zadanie opcjonalne: porównanie otrzymanych wyników z wartościami oczekiwanymi
Testbench:
Wektor podawany jest automatycznie do odpowiednich portów CUT poprzez konstrukcję
mapowania portów polegającą na wewnętrznym przypisaniu sygnałów
Potrzeba generowania dwóch typów sygnałów:
o Zegar – sygnał powtarzalny, okresowy
o
sekwencyjne przypisanie sygnałów – wektory testowe CUT

Zgodność łączeniowa
Zgodność łączeniowa - Układy A i B są ze sobą zgodne łączeniowo, jeżeli odpowiednie połączenia wejść i
wyjść tych układów zapewniają poprawną (elektrycznie) pracę układów
Obciążalność wyjściowa - ilość wejść następnych bramek, jaką można podłączyć do wyjścia rozpatrywanej
bramki.

Cechy projektowania układów cyfrowych
-wartości zmiennych i stałych są przechowywane w rejestrach lub pamięciach,
-zmienne i stałe są pobierane z miejsc przechowywania przy narastającym zboczu sygnału
zegarowego,
-w układach kombinacyjnych dokonywana jest transformacja (w czasie pomiędzy dwoma
narastającymi zboczami sygnału zegarowego),
-wyniki są przechowywane w pamięciach lub rejestrach przy kolejnym zboczu zegara jeden
przerzutnik ja jeden stan
Ścieżka danych
Wykorzystanie ścieżki danych:
standardowe procesory
implementacje ASIC
Ścieżka danych służy do tymczasowego przechowywania informacji w połączeniu z układami
arytmetycznymi i logicznymi.
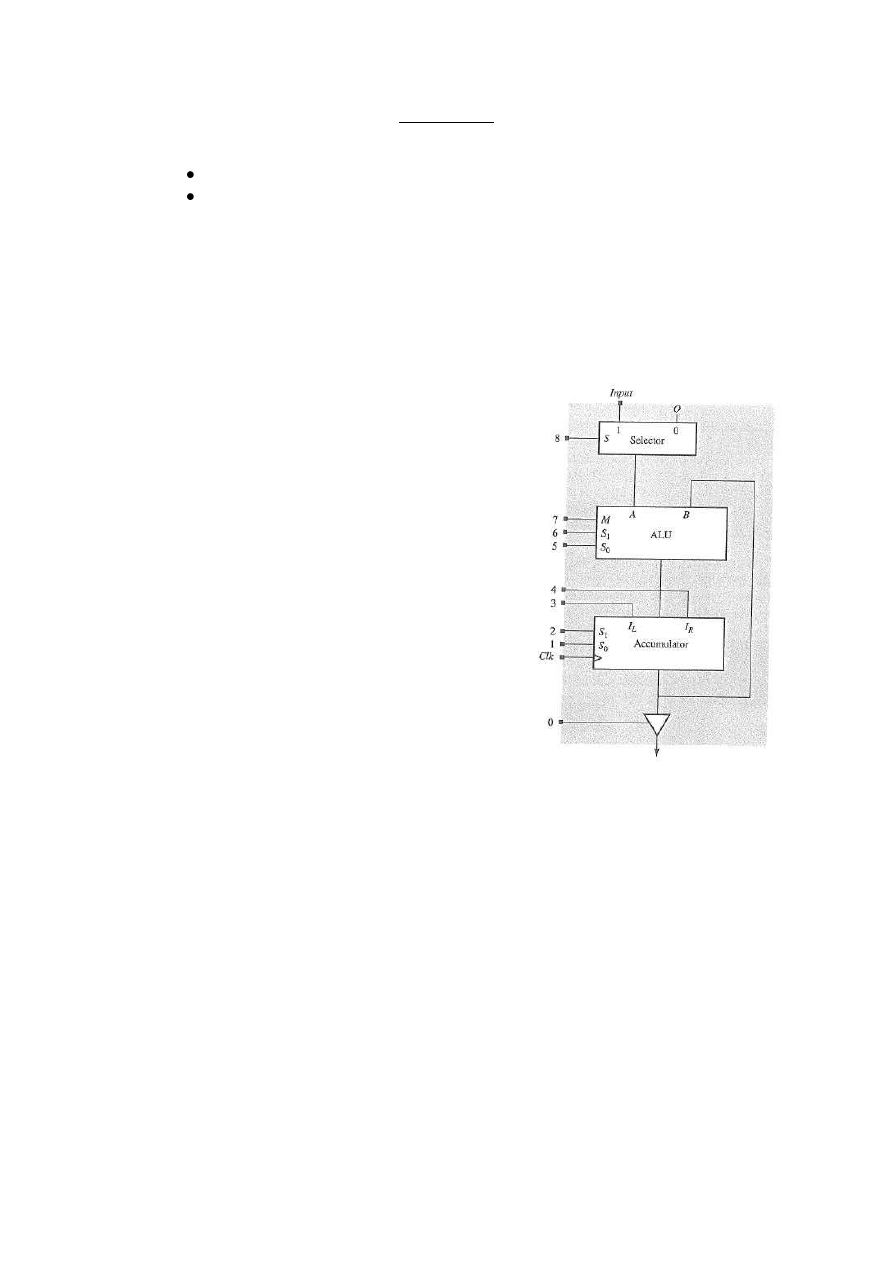
Przykład: Operacja sumowania 100 liczb.
suma = 0
Ciało pętli:
loop:
- 32-bitowa ścieżka danych
for i = 1 to 100
- Akumulator
suma = suma + xi
- ALU
end loop
Zmienna suma jest przechowywana w akumulatorze. W
każdym takcie zegara nowa wartość xi jest dodawana do
zmiennej suma w ALU. Nowa wartość suma jest
ponownie przechowywana w Akumulatorze.
Słowo sterujące definiuje zachowanie ścieżki danych w
każdym takcie zegara. Obliczenie sumy wymaga 102
taktów zegara:
1 – zerowanie akumulatora
100 – dodawanie
1 – wyprowadzenie danych
Wyszukiwarka
Podobne podstrony:
opracowanie uoop 2008 wpiaforum.na7.pl, Prawo - materialy
LABORKI OPRACOWANE DOŚWIADCZENIA, 2008.01.12 KOROZJA METALI I, KOROZJA METALI I
opracowanie z TC
dydaktyka opracowanie 2008 2009 wpuw 091011124634 phpapp02
pytania z anatomii z 2008 roku z anatomii - opracowane, Studia, Ratownictwo Medyczne, Semestr I, Ana
opracowania, Ochrona Środowiska studia, 2 rok (2007-2008), Semestr IV (Rok 2), Kartografia Geologicz
TEMATY do opracowania ZARZĄDZANIE W PIELĘGNIARSTWIE 2008, I
PPG opracowanie, 11 partnerstwo, USTAWA z dnia 19 grudnia 2008 r
Tc Tu wyniki 2008, EIT
więcej podobnych podstron