W
laboratoriach tej firmy naj-
pierw opracowano i upo-
wszechniono ca³¹ rodzinê mi-
krorobotów znanych jako „EMRoS
(Epson Micro Robot System), po-
czynaj¹c od modelu o nazwie
Monsieur (objêtoœæ 1 cm
3
). Mon-
sieur, który pojawi³ siê w sprzeda-
¿y jeszcze w roku 1993, od razu
trafi³ do Ksiêgi Rekordów Guinnes-
sa. Na tê seriê sk³ada³y siê ponad-
to modele Nino (objêtoœæ 0,5 cm
3
),
Ricordo (z funkcj¹ zapisu i odtwa-
rzania) oraz Rubie, dysponuj¹cy
ca³ym szeregiem funkcji pozwala-
j¹cych mu na swobodne wêdrowa-
nie. Ciekawostk¹ jest to, ¿e mode-
le te mia³y zdolnoœæ pod¹¿ania za
Ÿród³em œwiat³a. W 2003 roku po-
jawi³a siê wersja Monsieur II-P, bê-
d¹ca prototypem mikrorobota wy-
korzystuj¹cego do napêdu ultra-
cienki silnik ultradŸwiêkowy oraz
modu³y steruj¹ce z ma³ym pobo-
rem mocy, w standardzie Blue-
tooth, umo¿liwiaj¹ce jednoczesne
zdalne sterowanie wieloma podze-
spo³ami.
Potem przysz³a pora na coœ
ciekawszego. Mikrohelikopter µFR
ma œrednicê oko³o 130 mm, wyso-
koœæ 70 mm i wa¿y oko³o 8,9 g
(w tym uk³ady steruj¹ce wa¿¹ oko³o
2,5 g, czujniki 0,9 g i mechanika 5,1 g).
Uk³ady s¹ zasilane napiêciem 3,5 V,
a pobór mocy wynosi 3 W.
Mikrohelikopter posiada po-
dwójny wirnik, którego ³opaty wiru-
j¹ce w przeciwnych kierunkach na-
pêdzane s¹ najcieñszym w œwiecie
mikrosi³ownikiem (ultradŸwiêko-
wym silniczkiem) o najwy¿szym w
œwiecie wskaŸniku stosunku mocy
do ciê¿aru. Liniowy mikrosi³ownik
wykorzystano w mechanizmie sta-
bilizatora kontroluj¹cego po³o¿enie
mikrohelikoptera podczas lotu. Naj-
bardziej istotne by³o to, aby dziêki
mikromechanotronice stworzyæ nie-
zwykle zwart¹ konstrukcjê celem
zminimalizowania wielkoœci i ciê¿a-
ru uk³adów steruj¹cych.
Opracowuj¹c µFR, Epson
postanowi³ zademonstrowaæ mo¿-
liwoϾ rozszerzenia obszaru dzia-
³ania mikrorobotów z przestrzeni
dwuwymiarowej (na powierzchni
ziemi) na przestrzeñ trójwymiaro-
w¹. Uk³ady kontrolno-steruj¹ce
by³y wprawdzie zdalnie sterowa-
ne za poœrednictwem fal radio-
wych, ale zasiêg lotu by³ ograni-
czony przez kabel, doprowadzaj¹-
cy napiêcie zasilaj¹ce z zewnêtrz-
nej baterii. Prototyp opracowano
tak¿e z myœl¹ o pokazywaniu go
na wystawach i imprezach tech-
nicznych, aby obserwowaæ reak-
cjê publicznoœci i zbadaæ proble-
my zwi¹zane z jego funkcjonalno-
œci¹, a nastêpnie skoncentrowaæ
siê na dalszym doskonaleniu i po-
szukiwaniu ewentualnych przy-
sz³ych zastosowañ tego rodzaju
urz¹dzeñ.
Ostatnio Epson pokaza³ jesz-
cze l¿ejszego i nowoczeœniejszego
nastêpcê µFR - µFR-II, zdalnie ste-
rowanego i wyposa¿onego w auto-
nomiczne Ÿród³o zasilania. Zadanie
to wymaga³o opracowania l¿ej-
szych podzespo³ów i zwiêkszenia
si³y noœnej. W tym celu opracowano
nowy czujnik ¿yroskopowy, piêæ ra-
zy l¿ejszy od jego poprzednika (no-
wy rekord œwiatowy w tej dziedzi-
nie). Tego rodzaju czujniki s¹ stoso-
wane np. w systemach kompensu-
j¹cych drgania kamer i aparatów
cyfrowych.
W uk³adach steruj¹cych za-
stosowano dwa 32-bitowe mikro-
kontrolery RISC i monta¿ o du¿ym
zagêszczeniu elementów. Si³ê no-
œn¹ zwiêkszono o oko³o 30%, wyko-
rzystuj¹c wydajniejsze ultradŸwiê-
kowe silniczki i nowo opracowane
³opatki wirników o zoptymalizowa-
nym kszta³cie. (Przy ich opracowy-
waniu pomagali specjaliœci z Labo-
ratorium Aeronautyki uniwersytetu
w Tokio.) Jako Ÿród³o zasilania wy-
korzystano powszechnie dostêpne
baterie polimerowo-litowe.
Mikrohelikopter µFR-II zasila-
ny jest napiêciem 4,2 V, a jego po-
bór mocy wynosi 3,5 W. „Maszyna”
ma œrednicê 136 mm, wysokoœæ
oko³o 85 mm i wa¿y wraz z bateria-
mi 12,3 g (8,6 g bez baterii). Czas
trwania lotu dochodzi do 3 minut. !
Specjaliści firmy Seiko Epson Corporation („Epson”) zajmują
się konstruowaniem nie tylko nowoczesnych zegarków, czy
drukarek, ale także „bawią się”, wymyślając najmniejsze w
świecie mikroroboty, w tym latające maszyny µFR („Micro
Flying Robot”). Chodzi im o zademonstrowanie możliwości
najnowocześniejszej, rozwijanej w firmie od wielu lat tech-
nologii „mikromechanotroniki” i tworzonych na jej podsta-
wie podzespołów oraz przebadanie właściwości użytkowych
mikrorobotów.
M
Ł
ODY
TECHNIK
1
/2005
3
37
7
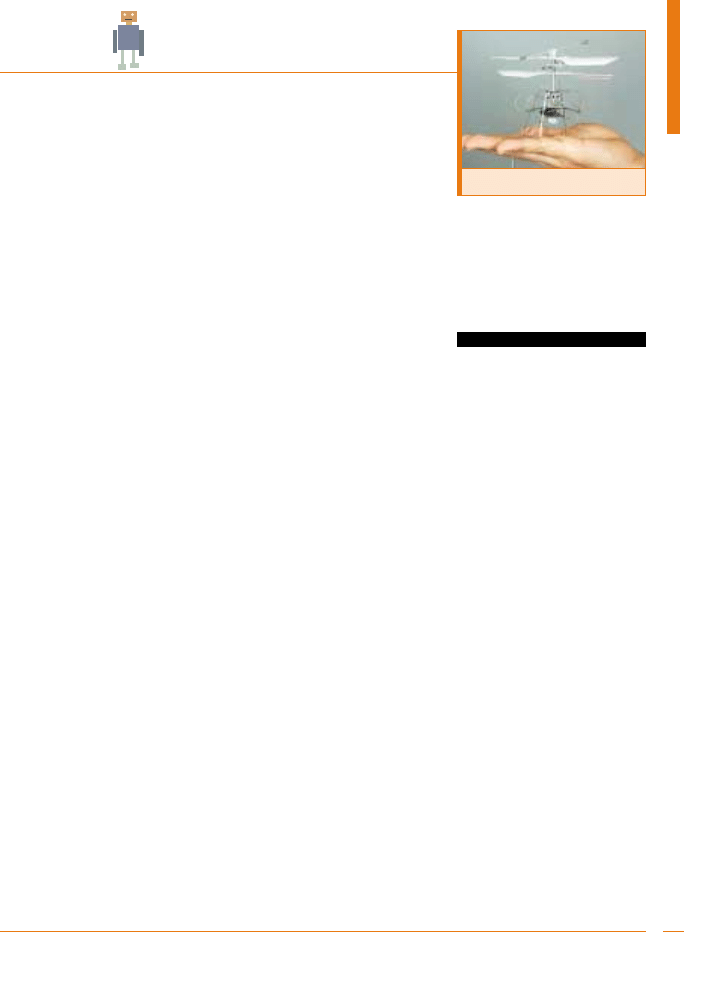
Mikrorobot na dłoni
NAJMNIEJSZY
HELIKOPTER W ŚWIECIE
J e r z y C h m i e l e w s k i
r o b o t y k a
Wyszukiwarka
Podobne podstrony:
01 2005 081 086
01 2005 027 029
GS 300 460, od 01 2005
KNR 2 01 Budowle i roboty ziemne 1
gazeta prawna 25 01 2005 (1382) Nieznany
01 2005 066 068
01 2005 087 089
01 2005 035 041
pytania z integracji1[1][1] 01 2005
01 2005 123 124
01 2005 111 113
01 2005 061 062
01 2005 054 060
Obróbka powierzchniowa i cieplna - ściąga 01, Automatyka i Robotyka, Semestr 3, Obróbka cieplna i po
01 2005 043 048
Podstawy rachunkowości, Rachunkowość - test eop 24 01 2005, 1
Nie z tego świata s. 01 (2005 - 2006), Nie z tego świata s.01 2005-2006
więcej podobnych podstron