Dr inż. Michał Chłędowski
PODSTAWY AUTOMATYKI I ROBOTYKI –
LABORATORIUM
Ćw. S-II.2
CHARAKTERYSTYKI SKOKOWE
ELEMENTÓW AUTOMATYKI
Cel ćwiczenia
Celem ćwiczenia jest zapoznanie się
z pojęciem charakterystyki skokowej h(t),
praktycznym sposobem jej otrzymywania oraz możliwościami wykorzystania do identyfikacji
parametrów badanych elementów. Dodatkowym celem jest zapoznanie się z metodami symulacji
działania elementów automatyki, w tym przypadku poprzez graficzne przedstawianie
charakterystyk skokowych wykorzystując programy Matlab lub SciLab.
Program ćwiczenia
1. Cześć doświadczalna
Należy zarejestrować wykresy charakterystyk skokowych trzech termopar:
•
T1 – termopara typu J (żelazo-konstantan) w osłonie,
•
T2 – termopara typu J bez osłony,
•
T3 – termopara lotnicza (do pomiaru temperatury głowicy silnika lotniczego).
2. Opracowanie wyników
•
Dla każdej termopary należy napisać G(s) wyznaczajśc uprzednio z otrzymanych
wykresów charakterystyk skokowych wartości współczynników występujących w tych
transformatach,
•
Narysować wykresy charakterystyk skokowych elementów automatyki opisanych w/w
transformatami korzystając z dostępnego oprogramowania. Przeanalizować wpływ
parametrów na przebieg h(t).
Podstawy teoretyczne
Analiza i synteza układów sterowania automatycznego opiera się na wykorzystaniu
charakterystyk dynamicznych. Charakterystyki te opisują zachowanie się
układu sterowania jako
całości lub poszczególnych jego elementów w stanach dynamicznych, tj. podczas trwania
procesów przejściowych.
Rozróżniamy dwa rodzaje charakterystyk dynamicznych:
1) charakterystyki czasowe,
1
2)
charakterystyki częstotliwościowe.
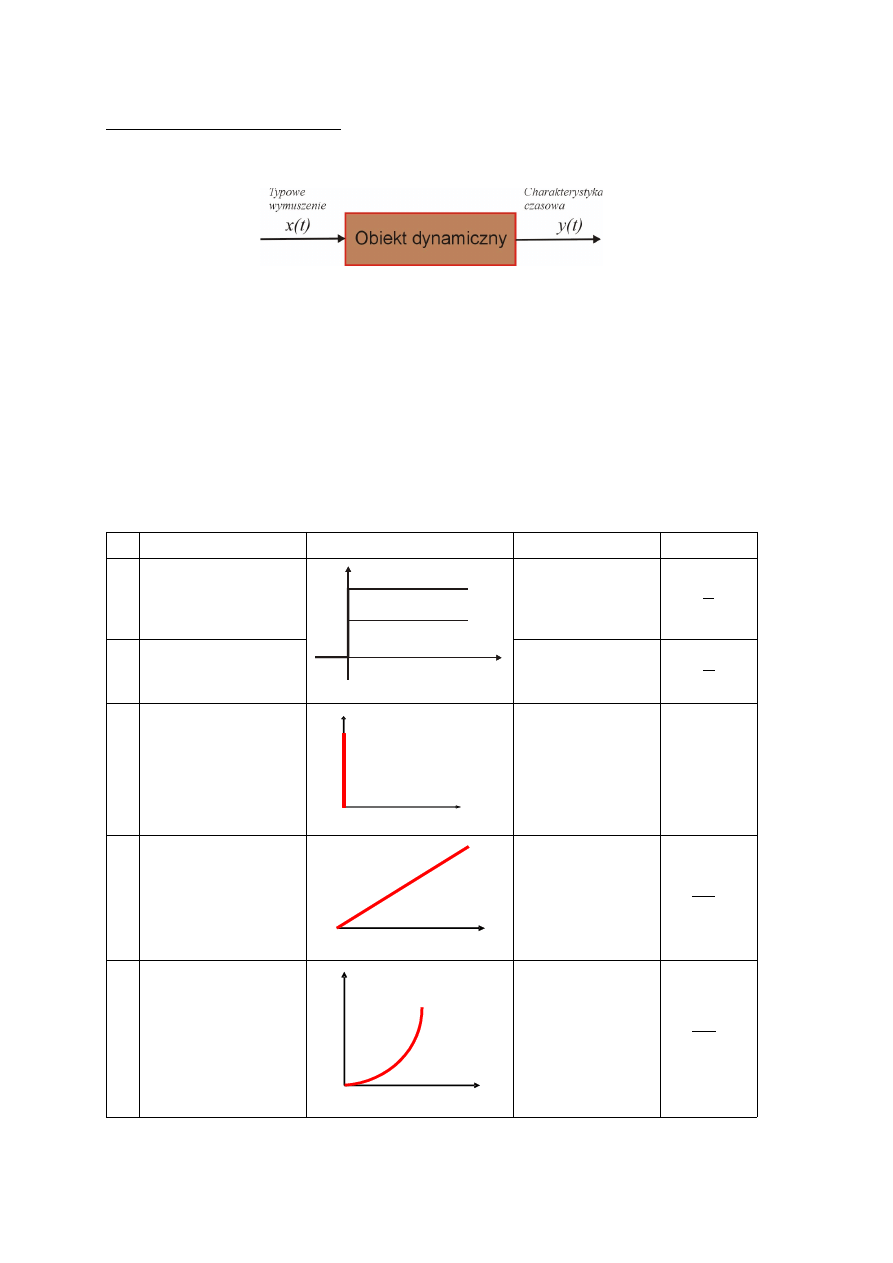
Charakterystyka czasowa
Jest to przebieg w czasie odpowiedzi y(t) układu (elementu) dynamicznego (rys. 2.1) na
określone wymuszenie x(t), zwane typowym wymuszeniem .
Rys. 2.1. Ilustracja definicji charakterystyki czasowej
W celu badania właściwości dynamicznych elementów należy rozwiązać
równanie
różniczkowe lub jakimś
pośrednim sposobem przebadać
jego rozwiązanie. Możliwe to jest pod
warunkiem, że znana jest wielkość
wejściowa x(t) jako funkcja czasu. W warunkach
rzeczywistych przy pracy układu sterowania wielkość
wejściowa każdego elementu jest
właściwie przypadkową
funkcją
czasu. Dlatego do badania elementów przyjmuje się
kilka
typowych (standardowych) sygnałów odzwierciedlających różne stany zbioru wejściowych
sygnałów przypadkowych. Sygnały wejściowe nazywają
się
wymuszeniami, a sygnały wyjściowe
powstające w wyniku ich oddziaływania - odpowiedzią
na te wymuszenia. Typowe wymuszenia
przed tabela 2.1.
Tabela 2.1. Typowe wymuszenia
Lp. Nazwa
Wykres
f(t)
F(s)
1
Skok jednostkowy
(funkcja Heaviside'a)
1(t)
1
s
2
Wymuszenie
skokowe
1t ⋅a
a
s
3
Funkcja Diraca
(wymuszenie
impulsowe)
F(s) = 1
4
Wymuszenie liniowo
narastajśce
(skok
prędkości)
a⋅t
5
Wymuszenie
paraboliczne
(skok przyśpieszenia)
a⋅t
2
2
a1(t)
1(t)
t
x(t)
0
t
(t)
t
at
x
t
at
2
0
0
0
)
(
t
przy
t
przy
t
2
s
a
3
2
s
a
Charakterystyki skokowe
Najczęściej stosowanym wymuszeniem jest wymuszenie skokowe. Wymuszenie to osiąga
skokowo w chwili t = 0 wartość
a = const i dalej pozostaje stałe. Znaczy to, że x(t) = a przy t
0
i x(t) = 0 przy t < 0.
Często dla funkcji skokowej używa się
oznaczenia
x t =a⋅1t
Funkcja 1(t) nazywa się
jednostkową
funkcją
skokową
lub krótko skokiem jednostkowym.
Jeśli amplituda skoku jest różna od jedności i wynosi a, to takie wymuszenie nazywamy
wymuszeniem skokowym (Tabela 2.1).
Powstawanie skokowego sygnału wejściowego jest bardzo typowe. W urządzeniach
elektrycznych i elektromechanicznych sygnał
skokowy oznacza przyłączenie napięcia stałego na
wejście elementu np. napięcia zasilania. W miernikach podanie na zaciski wejściowe mierzonej
wielkości oznacza podanie wymuszenia skokowego. W rezultacie takiego wymuszenia miernik
przejdzie do nowego stanu równowagi. Proces przechodzenia do nowego stanu równowagi przy
wymuszeniu skokowym opisuje się
rozwiązaniem równania różniczkowego przy x(t) = a
⋅
1(t).
Proces ten czyli odpowiedź
skokowa
(lub charakterystyka skokowa) - to odpowiedź
elementu
lub
układu na skokowe wymuszenie wejściowe.
Transformata Laplace'a wymuszenia skokowego ma postać:
L [a⋅1 t]=a
1
s
=
a
s
.
Odpowiedzi skokowe podstawowych elementów automatyki
Odpowiedzią
y(t) na wymuszenie x(t) nazywamy przebieg w czasie wielkości wyjściowej
y następujący po wprowadzeniu sygnału wejściowego x(t).
Z definicji transmitancji
G s =
Y s
X s
=
b
m
s
m
b
m
−
1 s
m
−
1...b
o
a
n
s
n
b
n
−
1 s
n
−
1...a
o
=
M s
N s
mamy
Y s=G s ⋅X s =
M s
N s
X s
.
Ogólnie, odpowiedź
y(t) jest oryginałem transformaty Y(s)
Odpowiedź
skokowa układu lub elementu - jest to odpowiedź
na funkcję
skokową
x(t) = a
⋅
1(t).
Charakteryzuje ona przejście układu z jednego stanu równowagi lub stanu ustalonego do
drugiego. Jeśli równanie liniowe układu słuszne jest dla małych odchyleń, to wielkość
a funkcji
skokowej powinna być
mała. Dla układów liniowych zwykle przyjmuje się
a = 1. Odpowiedź
układu na jednostkowe wymuszenie skokowe przyjęto oznaczać
jako h(t).
W celu określenia odpowiedzi skokowej układu lub elementu liniowego należy rozwiązać
równanie niejednorodne układu (patrz równanie 1.1 w ćw. 1) przy założeniu, że na wejście
podamy wymuszenie skokowe x(t) = 1(t). Wówczas za y(t) możemy podstawić
h(t) i otrzymamy
a
n
d
n
h
dt
n
+
a
n−1
d
n−1
h
dt
n−1
+
...+a
2
d
2
h
dt
2
+
a
1
d h
dt
+
a
o
h=
¿
b
o
1(t)+b
1
d1(t)
dt
+
b
2
d
2
1(t)
dt
2
+
...+b
m
d
m
1(t)
dt
m
(2.1)
Rozwiązanie równania (2.1) jest równoważne określeniu oryginału transmitancji
3
H s=G s
1
s
=
M s
N s
1
s
skąd
h t= L
−
1
[
H s ]=c
o
∑
i =1
n
c
i
e
s
i
t
(2.2)
gdzie:
c
o
=
M 0
N 0
=
b
o
a
o
s
i
- pierwiastki równania charakterystycznego.
Wyrażenie (2.2) jest słuszne tylko wtedy, gdy wielomian N(s) nie ma pierwiastków
wielokrotnych ani pierwiastka równego zero.
Odpowiedź
skokowa h(t), charakteryzująca proces ustalania wielkości wyjściowej przy
skokowej zmianie wielkości wejściowej składa się
z dwóch składowych: c
o
i
∑
i=1
n
c
i
e
s
i
t
. Druga
składowa przedstawia sobą
całkę
równania jednorodnego (2.1), tzn. składową
przejściową
procesu ustalania. Składowa ta jest nazywana uchybem dynamicznym. W układzie lub elemencie
stabilnym składowa przejściowa dąży do zera z upływem czasu, tzn. że
lim
t ∞
∑
i =1
n
c
i
e
s
i
t
=
0
(2.3)
Składowa
c
o
=
M 0
N 0
=
b
o
a
o
to szczególne rozwiązanie równania niejednorodnego
(2.1), tzn. ustalona wartość
wielkości wyjściowej. Do tej wartości wielkość
wyjściowa dąży w
miarę
zanikania składowej przejściowej czyli uchybu dynamicznego.
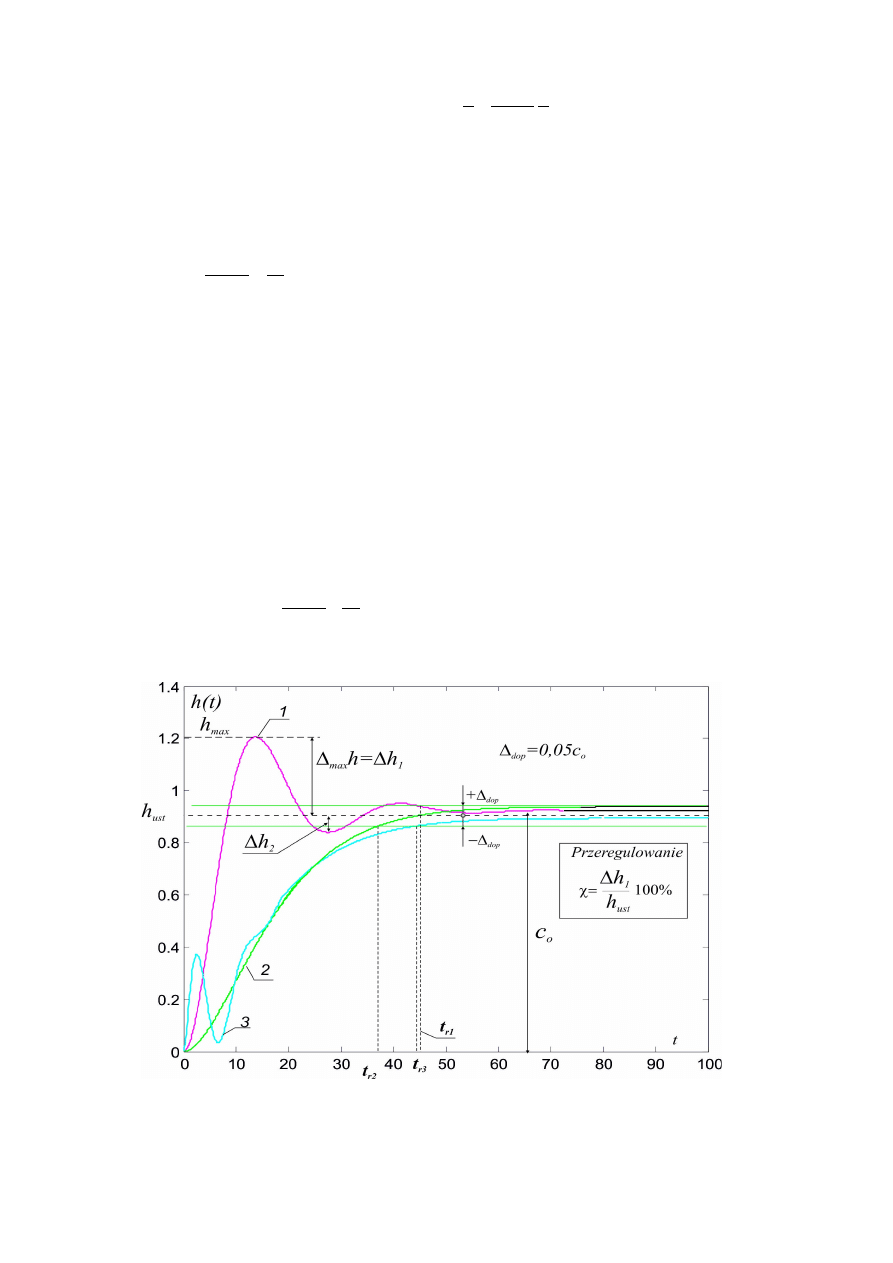
Rys. 2.3. Przykładowe charakterystyki skokowe
4
Odpowiedź
skokowa w ogólnym przypadku (rys. 2.3) charakteryzuje się
czasem regulacji
t
r
, wielkością
przekroczeń
Δh
1
, Δh
2
i ich liczbą. Δh
1
nazywa się
przeregulowaniem. Czas
regulacji to czas, po upływie którego odpowiedź
skokowa pozostaje w granicach 0.95 c
o
< h(t) <
1.05 c
o
. Praktycznie można uważać, że w czasie t
r
wielkość
wyjściowa osiąga swoją
wartość
ustaloną. Teoretyczny czas ustalania w układzie liniowym dąży do nieskończoności zgodnie z
wyrażeniem (2.3). Przeregulowanie - to przekroczenie przez wielkość
wyjściową
swojej wartości
ustalonej w procesie ustalania. Przeregulowania zwykle są określane jako odchylenia procentowe
od wartości c
o
i w tej postaci oznaczane jako χ.
Rozpatrzymy odpowiedzi skokowe podstawowych członów przyjmując wymuszenie
skokowe o amplitudzie równej a ( x(t)=a1(t)).
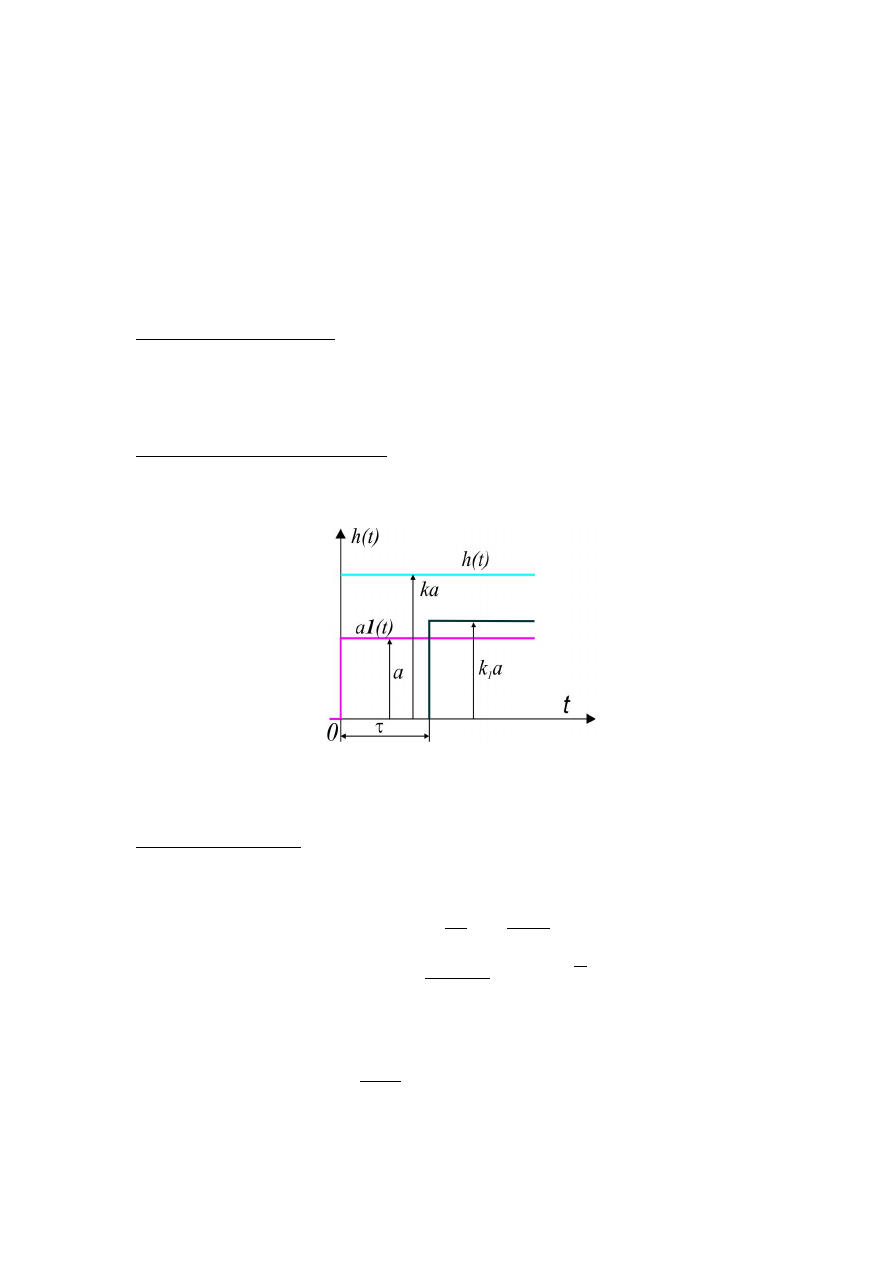
Człon wzmacniający
Odpowiedź
skokowa członu wzmacniającego
h t=k⋅a⋅1t
przedstawia sobą
funkcją
skokową
zwiększoną
k razy w stosunku do wejściowej.
Człon o stałym opóźnieniu
τ
Odpowiedź
skokowa będzie funkcją
skokową
przesuniętą
wzdłuż
osi czasu o wielkość
τ, tzn.
h t=k
1
⋅
a⋅1t−
Rys.2.4. Charakterystyka skokowa członu wzmacniającego (proporcjonalnego)
i członu wzmacniającego z opóźnieniem
Człon inercyjny
Transmitancja i wzór na charakterystykę
skokową
elementu inercyjnego I-go rzędu mają
postać
G s = y
s
x
s=
k
Ts1
;
h t= L
−
1
[
k
Ts1 s
]
=
ka
1−e
−
t
T
(2.4)
Odpowiedź
skokową
członu można otrzymać
także z rozwiązania równania
niejednorodnego opisującego człon inercyjny (2.5).
T
dht
dt
ht=k⋅a⋅1t
(2.5)
Odpowiedź
skokowa posiada dwie składowe: ka i - ka e
-t/T
. Druga składowa to całka
5
jednorodnego równania (2.5), tzn. składowa przejściowa procesu ustalania (uchyb dynamiczny).
Jak widać, uchyb dynamiczny zmniejsza się z upływem czasu według zależności wykładniczej.
Składowa ka jest rozwiązaniem szczególnym równania pełnego (2.5). Przedstawia ona wartość
ustaloną, do której dąży wielkość
wyjściowa w miarę
zanikania składowej przejściowej.
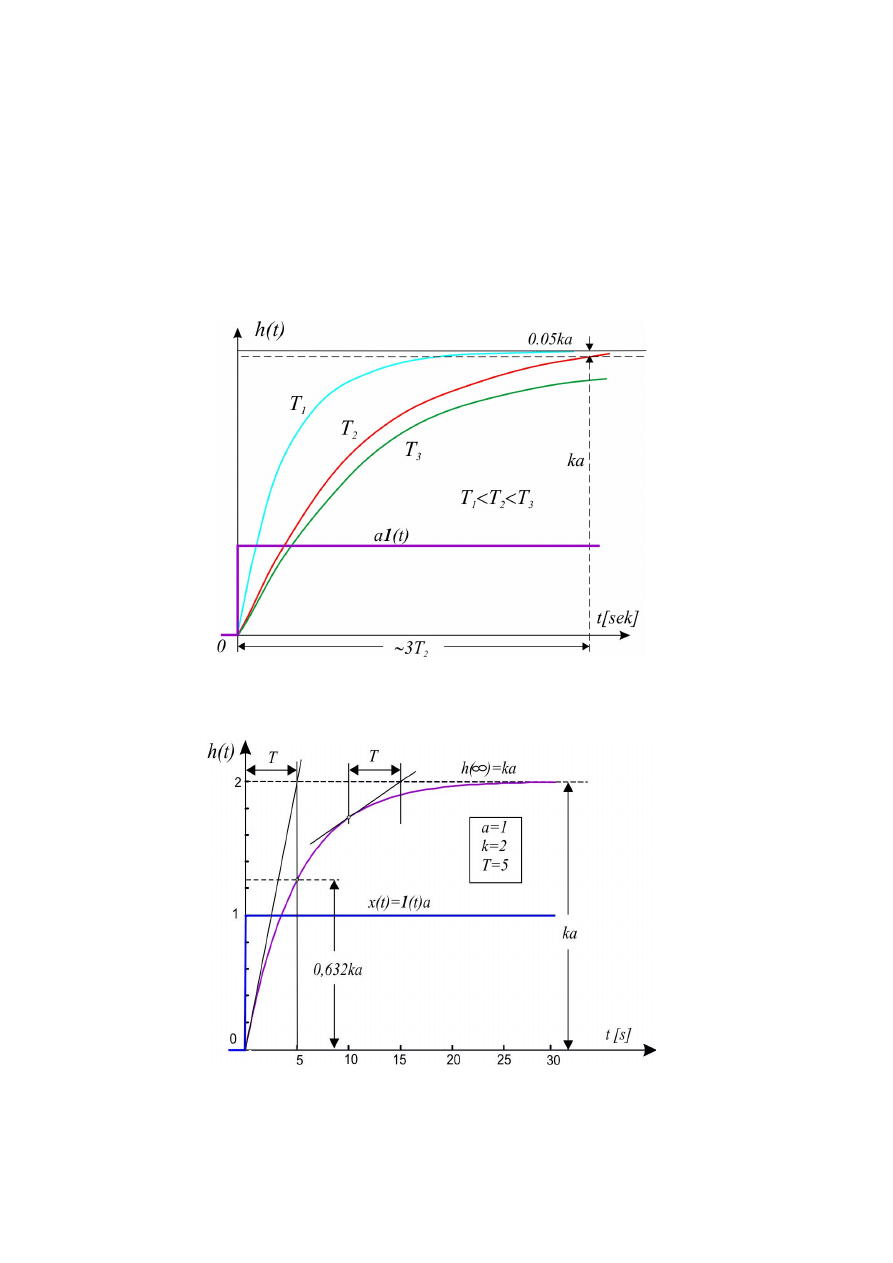
Zauważmy, że rozwiązanie równania (2.5) we współrzędnych h i t jest funkcją
wykładniczą. Na
rys. 2.5 przedstawiono krzywe h(t) dla trzech wartości T (T
1
< T
2
< T
3
). Jak widać
z krzywych,
czas trwania procesu przejściowego (ustalenia wielkości wyjściowej) jest tym mniejszy, im
mniejsza jest stała czasowa. Przy T = 0 funkcja wykładnicza zamienia się w funkcją
skokową
ka1(t), a człon inercyjny staje się członem wzmacniającym. Odpowiedź
skokowa członu
inercyjnego nie ma przeregulowania, a czas regulacji równy jest w przybliżeniu 3÷4 stałym
czasowym, tzn.
t
r
=
3÷4
.
Rys. 2.5. Odpowiedzi skokowe członu inercyjnego przy rożnych stałych czasowych
Rys. 2.6. Sposoby wyznaczania stałej czasowej z wykresu charakterystyki skokowej
członu inercyjnego
6

Odpowiedź
skokową elementu inercyjnego (jak i innych) można otrzymać
eksperymentalnie przykładając na wejście rzeczywistego elementu inercyjnego sygnał skokowy.
Zarejestrowany przebieg zmian wielkości wyjściowej będzie właśnie odpowiedzią
skokową. Z
zapisu eksperymentalnego h(t) można określić
parametry k i T odpowiedzi skokowej. W celu
określenia T przeprowadza się styczną do h(t) przy t = 0 (rys. 2.6). Styczna ta odcina na
asymptocie krzywej wykładniczej (prosta ka) stałą
czasową
T. Jeżeli początek procesu na zapisie
(oscylogramie) trudno jest ustalić, to styczną
można poprowadzić
z dowolnego punktu krzywej
wykładniczej przenosząc w ten punkt początek układu współrzędnych.
Człon całkujący
Równanie członu ca
_
kującego przy wymuszeniu skokowym x(t) = a1(t) ma postać
dy
dt
=
ka⋅1 t
(2.6)
Odpowiedź
skokowa opisana jest wzorem
h t=
∫
0
t
kadt=kat
i przedstawia równanie linii prostej. Wielkość
wyjściowa nieprzerwanie wzrasta liniowo przy
stałej wartości wielkości wejściowej. Jest to naturalne ponieważ
człon ten nie posiada równowagi
statycznej. Pojęcie czasu regulacji nie ma tutaj sensu.
Człon drugiego rzędu
Odpowiedź
skokową
otrzymuje się
jako rozwiązanie równania
T
2
d
2
ht
dt
2
2 T
dh t
dt
h t=k⋅1 t
przy zerowych warunkach początkowych lub jako oryginał
z wyrażenia
H s=G s
1
s
=
k
T
2
s
2
2 Ts1
1
s .
W zależności od wartości ζ
otrzymujemy następujące przypadki i związane z nimi
wyrażenia odpowiedzi skokowej:
1.
ζ
> 1, oba pierwiastki są
liczbami ujemnymi rzeczywistymi
(typowy człon inercyjny drugiego rzędu)
h t=k
[
1−
r
2
r
2
−
r
1
e
−
r
1
t
T
r
1
r
2
−
r
1
e
−
r
2
t
T
]
(2.7)
gdzie:
r
1
=−
2
−
1 , r
2
=∓
2
−
1
.
2.
ζ
< 1, oba pierwiastki są
liczbami zespolonymi sprzężonymi; w tym przypadku
człon nazywa się
oscylacyjnym a charakterystyka skokowa ma postać
h t=k
[
1−
e
−
t
T
r
sin
r
t
T
]
(2.8)
gdzie:
r =
1−
2
, =arctg
r
.
7
3. ζ
= 0 - przypadek krytyczny (oscylacje niegasnące)
h t=k
[
1−
1
t
T
e
−
t
T
]
(2.9)
W celu otrzymania równania (2.9) należy się posłużyć
wzorem rozkładu funkcji
wymiernej dla pierwiastków wielokrotnych lub szukać rozwiązania równania
T
2
d
2
h
1
t
dt
2
2 T
dh
1
t
dt
h
1
t=0
(2.10)
w postaci
h
1
t=c
1
e
−
t
T
c
2
t e
−
t
T
gdzie c
1
i c
2
- stałe.
Wyra
ε
ż nie (2.9) otrzymuje się
także drogą
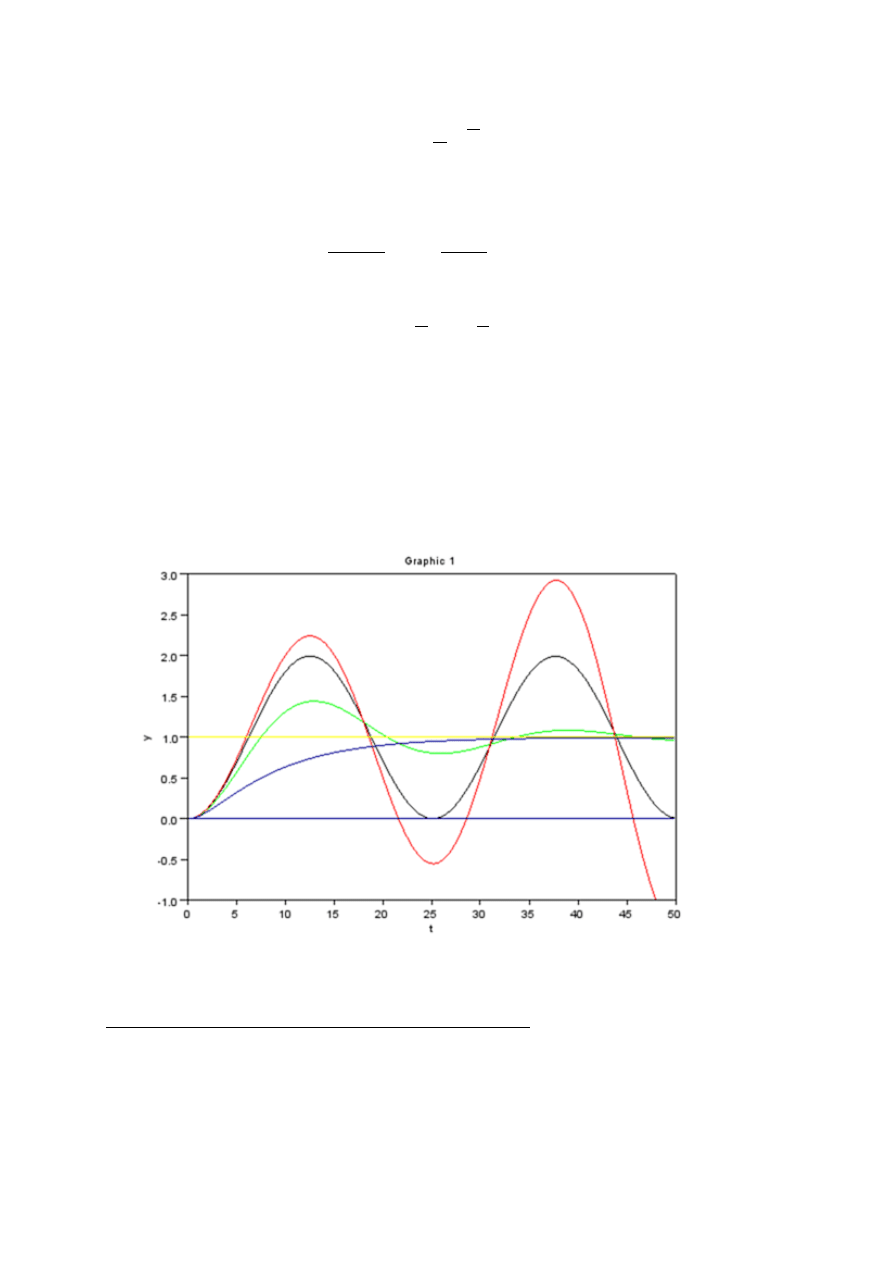
przekształcenia granicznego z (2.7) lub (2.8)
przy ζ
→
1. Przy ζ
< 1
(pierwiastki zespolone sprzężone) proces przejściowy jest oscylacyjnie
gasnący (jak na rys. 2.3). Przy ζ
> 1
proces jest aperiodyczny i przebiega bez oscylacji (jak
krzywa 2 na rys. 2.3). Na rys. 2.7 przedstawiono przebiegi charakterystyk skokowych członu
opisanego równaniem (2.10) dla następujących danych: T = 4, ζ = 0; 0,25; 1,2;-0,07. Czytelnikowi
pozostawimy dopasowanie poszczególnych krzywych do poszczególnych wartości ζ.
Rys. 2.7. Charakterystyki skokowe członu o równaniu (2.10)
Termoelement (termopara) jako element automatyki
Dwa przewody z różnych metali zespawane na jednym końcu tworzą
termoelement. Jeżeli
spoina pomiarowa ma inną
temperaturę
nić
wolne końce w termoelemencie powstaje siła
termoelektryczna. Jeżeli temperatura wolnych końców jest stała i znana, wartość
powstającej siły
termoelektrycznej jest miarę
temperatury spoiny pomiarowej. Czujniki termoelektryczne zwane
8
potocznie termoparami są elementami pomiarowymi często wykorzystywanymi w układach
automatycznej regulacji. Mierzą
różnicę temperatur pomiędzy gorącym i zimnymi końcami
termopary. Wielkością
wyjściową
jest siła termoelektryczna mierzona miliwoltomierzem.
Charakteryzują
się dużym zakresem pomiarowym, dobrą
liniowością
charakterystyk i
dokładnością.
Termopary wykonywane są z różnymi typami osłon, zależnie od środowiska i temperatury
pracy. Osłony z żelaza, żeliwa i stali są stosowane do 350
°
C, mosiądz i stale nierdzewne do
800
°
C, specjalne stale żaroodporne do 1200
°
C i osłony ceramiczne do 2200
°
C.
Coraz częściej stosowane są
obecnie specjalne czujniki płaszczowe, w których
termoelement w izolacji z tlenku magnezu jest zaprasowany w osłonie stalowej o średnicy 0.1
÷
6
mm. Czujniki te mają
bardzo małą
bezwładność
cieplną
i dają
się wyginać. W urządzeniach
laboratoryjnych stosuje się często termoelementy bez osłony.
Przewody kompensacyjne służą
do przedłużenia termoelementu od głowicy czujnika
(zimnych końców), w której występują
duże wahania temperatury do miejsca, w którym
utrzymuje się stałą temperaturę
odniesienia. Przewody kompensacyjne, zwłaszcza w zakresie
0
÷
200
°
C, mają
taką
samą
charakterystykę
termoelektryczną
jak termoelement z którym
współpracują, ale są
tańsze.
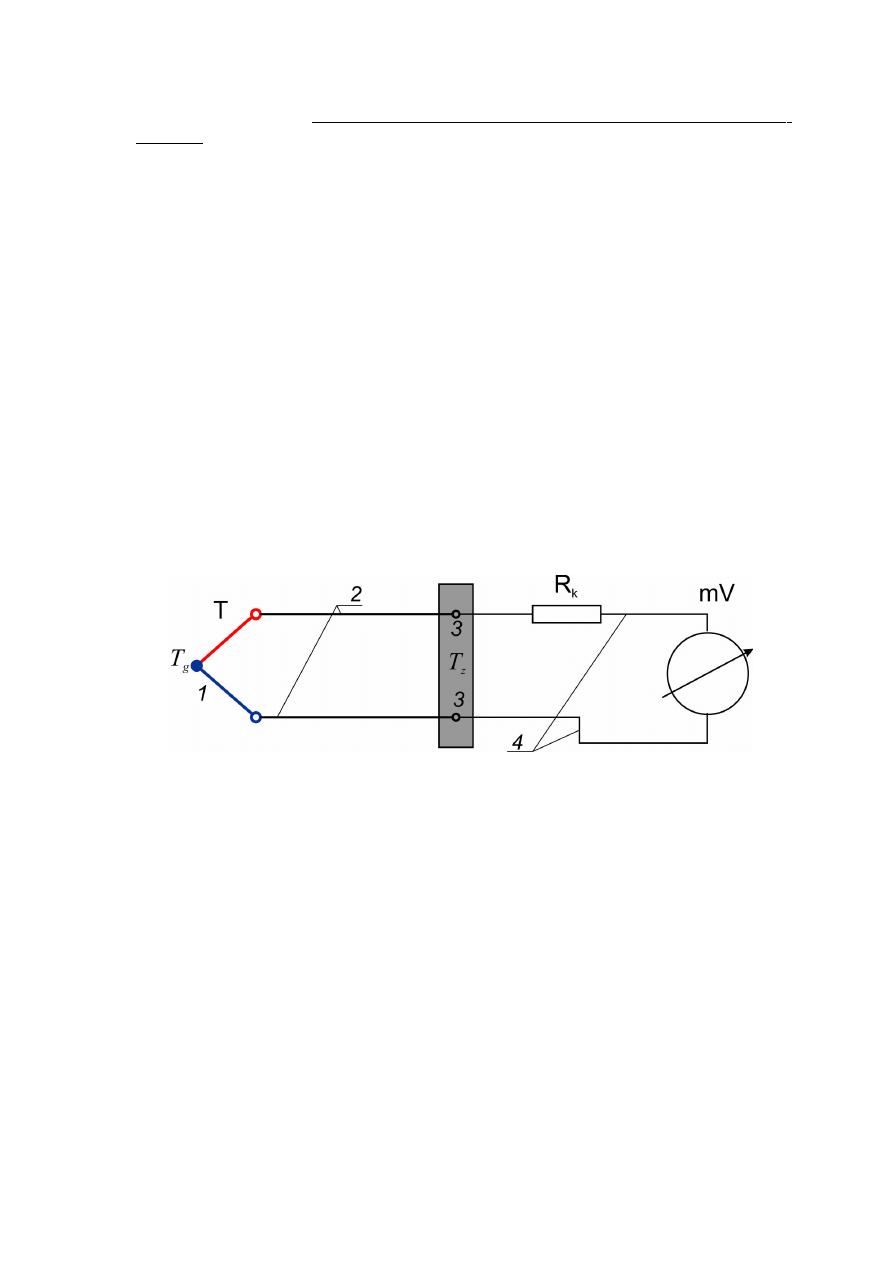
Najczęściej stosowanym i najtańszym układem termometru termoelektrycznego jest układ
odchyłowy. Schemat takiego układu przedstawia rys. 2.8. Jego wskazania są
prawidłowe
wówczas, gdy rezystancja obwodu zewnętrznego miernika jest równa wartości znamionowej,
podanej na mierniku. Wartość tę dopasowuje się przez odpowiednie nastawienie rezystora
wyrównawczego R
k
.
Rys. 2.8. Termometr termoelektryczny w układzie odchyłowym; T – termoelement, 1 –
spoina pomiarowa, 2 – przewody kompensacyjne, 3 – wolne końce, 4 – przewody łączeniowe, T
z
- temperatura odniesienia (zimnych końców), T
g
– temperatura mierzona (złącza pomiarowego –
gorących końców), R
k
- rezystor kompensacyjny, mV - miliwoltomierz
Właściwości dynamiczne termoelementu bez osłony lub w osłonie o małej bezwładności
cieplnej (np. termopary płaszczowe) opisuje się równaniem charakterystycznym dla elementu
inercyjnego I-go rzędu. W przypadku masywnej osłony konieczne jest uwzględnienie stałej
czasowej obudowy, która w tym przypadku jest dominująca. Własności dynamiczne takiej
termopary opisuje się przy pomocy równania charakterystycznego dla elementu inercyjnego II-go
rzędu. W celu uproszczenia opisu często stosuje się opis własności dynamicznych termopary w
obudowie w postaci opisu dla elementu inercyjnego I-go rzędu z opóźnieniem. Przykładowe
charakterystyki termopar przedstawia rys. 2.9. Krzywa 1 charakterystyczna jest dla termopar o
małej stałej czasowej (małej bezwładności – np. dla termopar płaszczowych lub termopar bez
osłony). Krzywa 2 odpowiada charakterystyce skokowej termopary w masywnej osłonie.
Współczynnik wzmocnienia k określamy jako stosunek sygnału wyjściowego w stanie
ustalonym do amplitudy sygnału wejściowego. Stan ustalony symbolizować będziemy znakiem
9
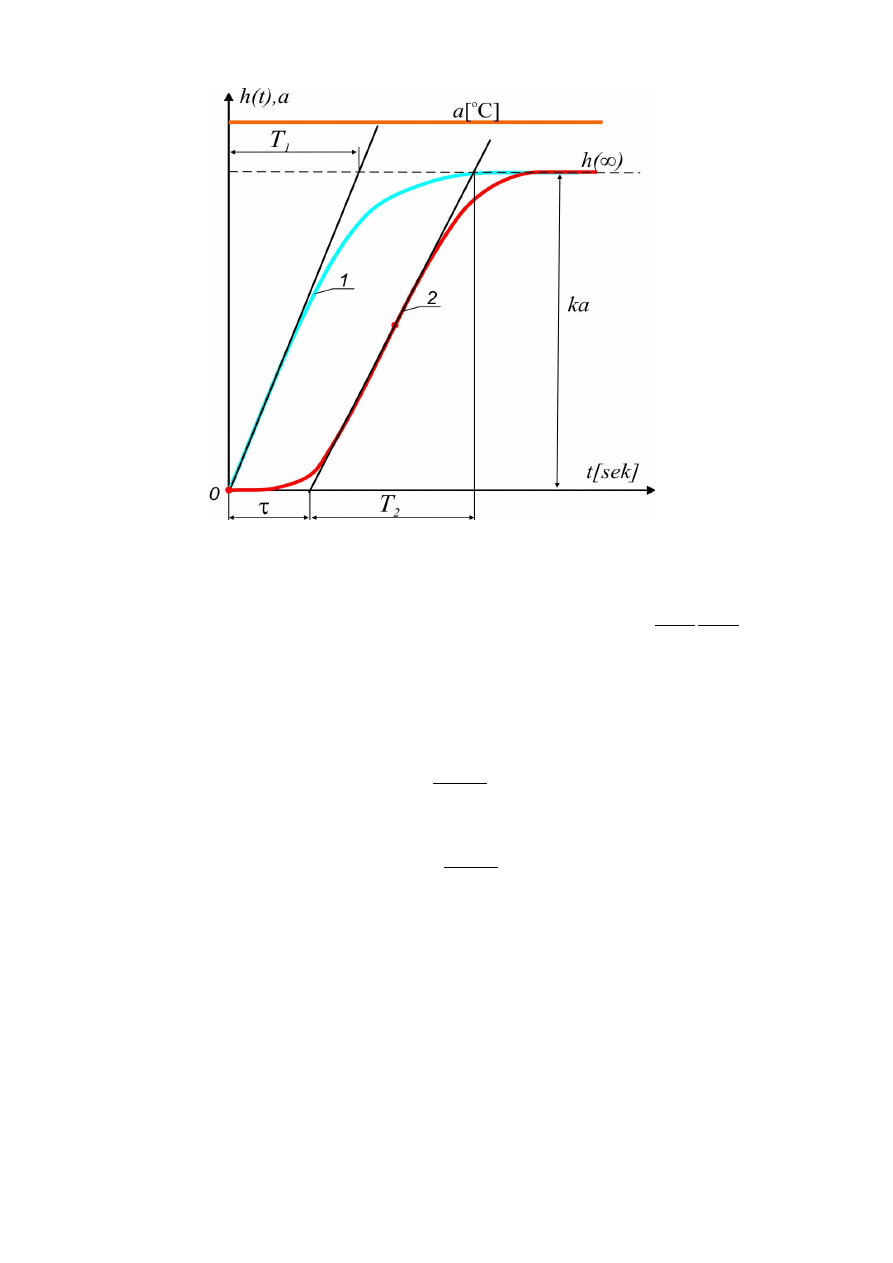
Rys. 2.9. Przykładowe charakterystyki skokowe termopar
nieskończoności. Współczynnik wzmocnie k wyznaczymy ze wzoru
k =
h (∞)
a
[
mV ]
[
C
o
]
.
Interpretacja fizyczna – współczynnik wzmocnienia termoelementu pokazuje o ile wzrośnie
wartość sygnału wyjściowego (w tym przypadku napięcia) przy wzroście amplitudy sygnału
wejściowego o jedną jednostkę (w tym przypadku – o 1 stopień).
Transmitancję termopary 1 zapiszemy w postaci transmitancji elementu inercyjnego I-go
stopnia czyli
G
1
(
s)=
k
1+T
1
s
Transmitancją
termopary 2 można w sposób przybliżony zapisać
następująco
G
2
(
s )=
k
1+T
2
s
e
−
τ
s
.
10
Praktyczna realizacja ćwiczenia
Część doświadczalna
Badaniu podlegać będą trzy termopary: T1, T2 i T3.
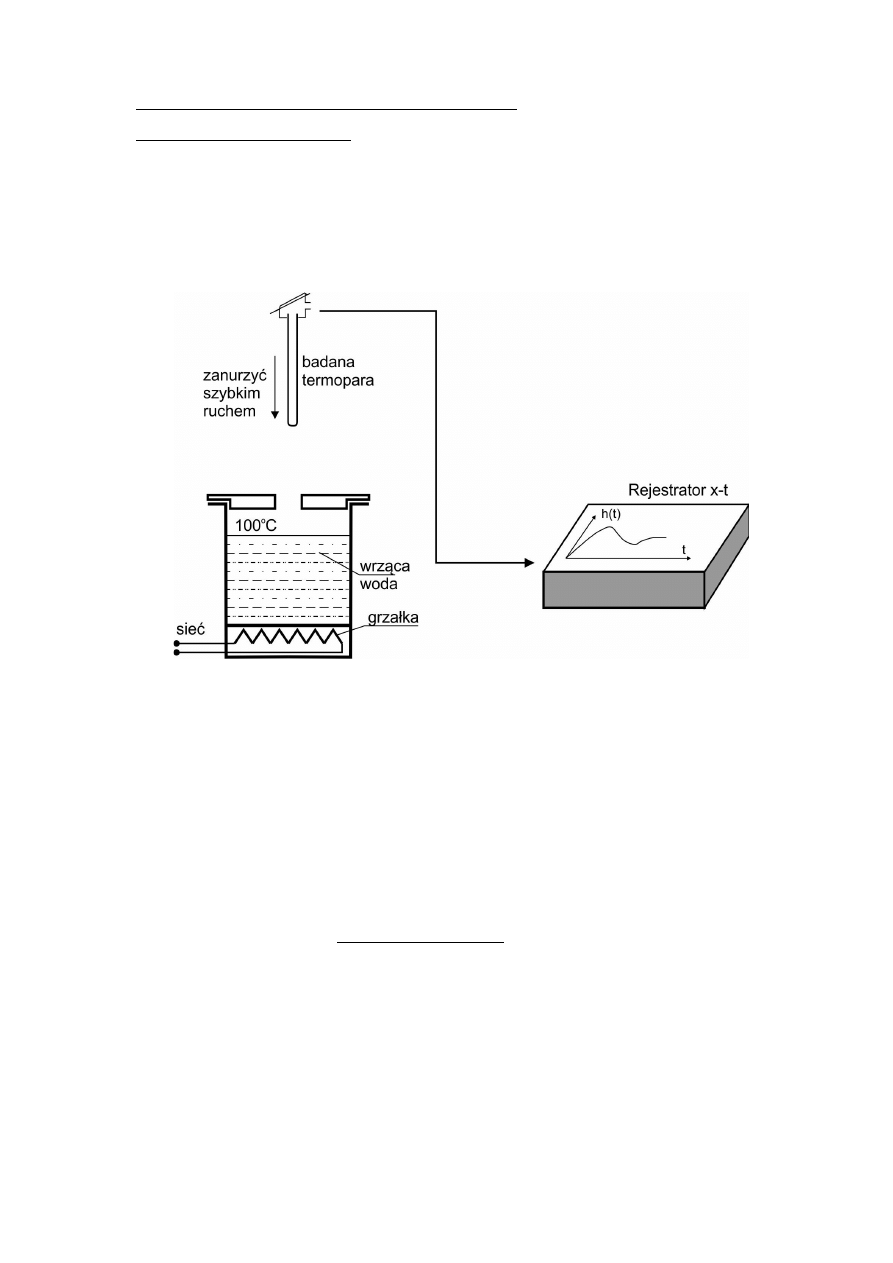
Schemat stanowiska do rejestracji charakterystyk skokowych termopar przedstawiony
jest na rys. 2.10 a rzeczywisty wygląd prezentuje foto 2.1. Wymuszenie skokowe, które dla
termopar ma postać różnicy temperatur pomiędzy zimnymi i gorącym końcami termopary ,
będziemy realizowali w następujący sposób:
Rys. 2.10. Schemat stanowiska laboratoryjnego do rejestracji charakterystyk skokowych
termopar
W kolbie znajdującej się w płaszczu grzewczym mamy wrzącą wodę. Temperaturę
wrzenia wody przyjmujemy równą 100
°
C. Zimne końce mają temperaturę równą temperaturze
otoczenia. Wartość temperatury otoczenia odczytujemy z termometru cieczowego wiszącego w
laboratorium na filarze. Po energicznym zanurzeniu badanej termopary do wrzącej wody
będziemy przyjmowali, że podaliśmy na nią temperaturowe wymuszenie skokowe, którego
amplituda wynosi 100
°
C – temperatura otoczenia.
Końce termopary podłączymy do rejestratora X-t. Sposób podłączenia, wskazane zakresy
pomiarowe i ogólnie, obsługa techniczna rejestratora zostanie omówiona przez prowadzącego
bezpośrednio przed realizacją ćwiczenia.
Należy zarejestrować dwie pary charakterystyk (dwa razy po dwa wykresy).
W jednym układzie współrzędnych należy zarejestrować charakterystyki skokowe
termopar T1 i T2. Są to termopary wykonane z tej samej pary metali (Fe-Konst). Pierwsza jest w
osłonie, druga - bez osłony. Należy porównać właściwości metrologiczne tych termopar i
wyciągnąć wnioski.
W drugim układzie współrzędnych należy zarejestrować wykresy charakterystyk
skokowych termopar T1 i T3. Mają one zbliżone właściwości cieplne (stałe czasowe) natomiast
inny współczynnik nachylenia charakterystyki. Poziom sygnału wyjściowego w stanie ustalonym
dla tych termopar będzie inny.
11
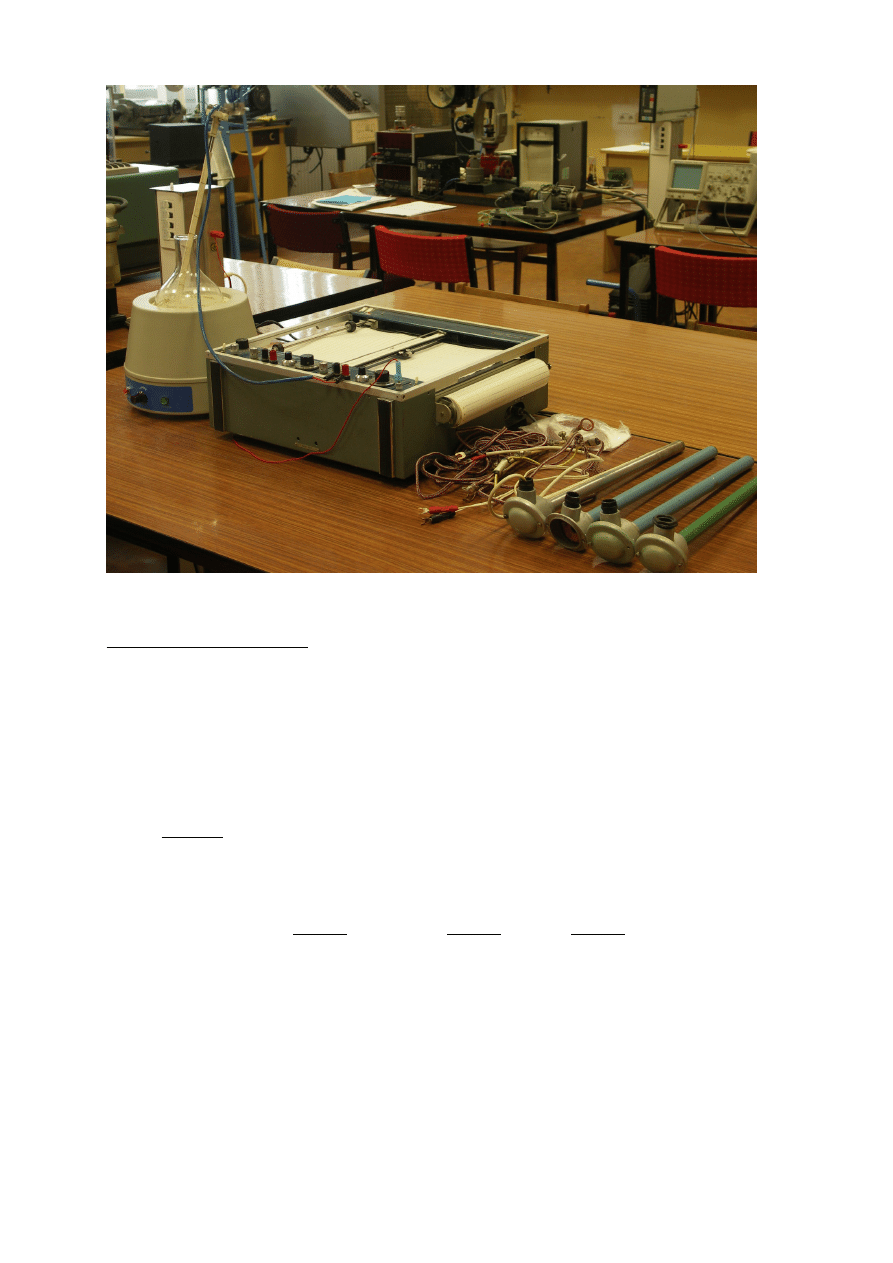
Foto 2.1. Fotografia stanowiska do rejestrowania charakterystyk skokowych
Część obliczeniowa
Cześć obliczeniowa w tym ćwiczeniu sprowadzać się będzie do dwóch zadań:
1. Identyfikacji badanych termopar jako elementów automatyki, czyli napisania dla
każdej z badanych termopar ich transmitancji operatorowych.
2. Stworzenia modeli tych termopar i narysowanie wykresów charakterystyk
skokowych uzyskanych na podstawie tych modeli.
Ad. 1. Na podstawie charakterystyki skokowej termopary T1 zapisanej w
pierwszej parze wykresów oraz na podstawie charakterystyk skokowych termopar T2 i
T3 zapisanych jako druga para wykresów można przypisać każdej termoparze
następujące postacie transmitancji operatorowych:
G
1
(
s)=
k
1
1+T
1
s
e
−
τ
s
;G
2
(
s)=
k
2
1+T
2
s
;G
3
(
s)=
k
3
1+T
3
s
.
Wykorzystując metody przedstawione na rys. 2.6 i 2.9 należy określić liczbowe
parametry badanych termopar: k
1
, k
2
, k
3
, T
1
, T
2
, T
3
, τ i napisać wyżej przedstawione
transmitancje operatorowe wstawiając wyznaczone parametry.
Przeanalizować wykresy oraz transmitancje operatorowe i wyciągnąć rozsądne
wnioski.
12
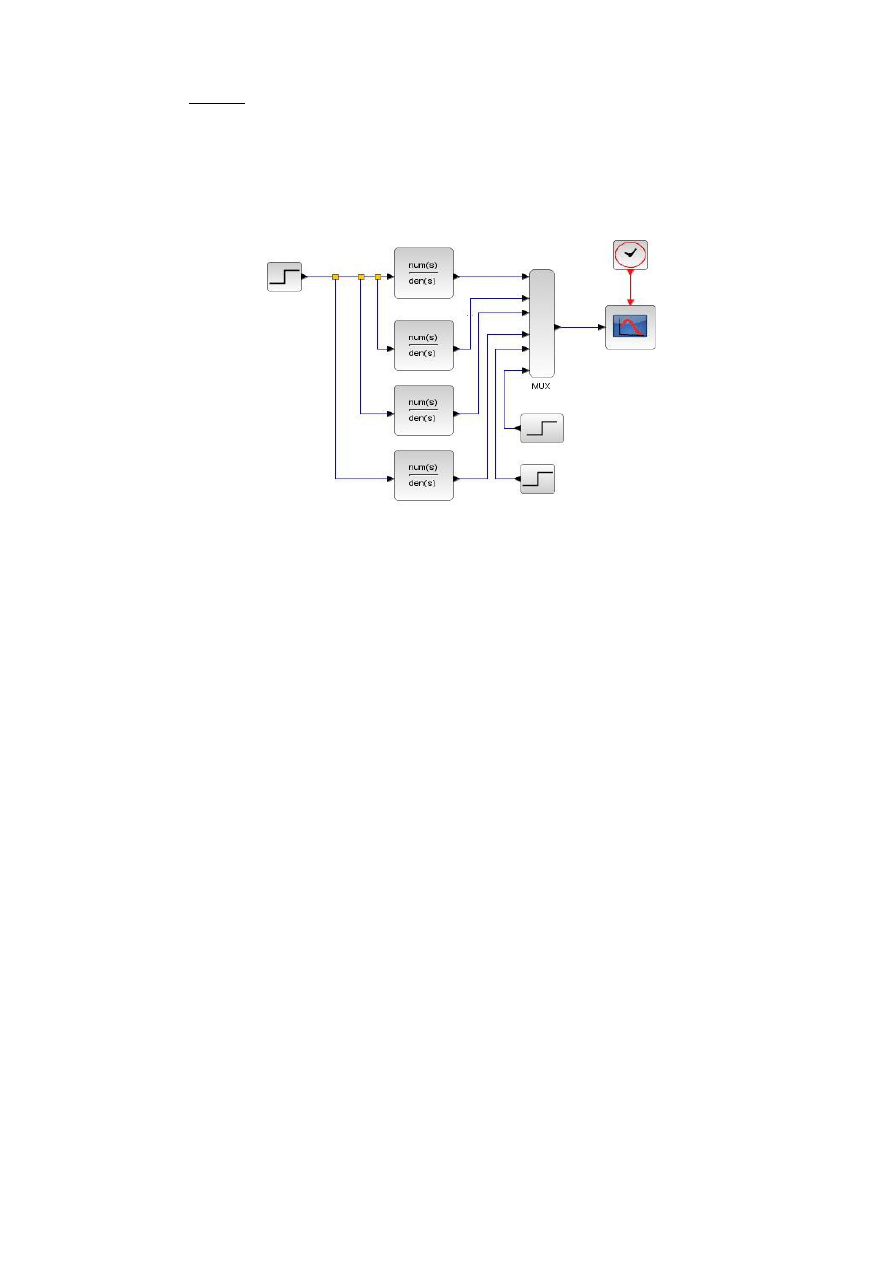
Ad. 2. Ta część sprawozdania ma za zadanie poćwiczenie problemów symulacji
elementów automatyki z wykorzystaniem programu symulacyjnego: Matlab lub SciLab.
Zadanie sprowadza się do narysowania charakterystyk skokowych elementów o
transmitancjach G
1
(s), G
2
(s), G
3
(s). Można to zrobić na wiele sposobów. Jednym z nich
jest poniższy schemat, przy pomocy którego zostały uzyskane wykresy na rys. 2.7 z
wykorzystaniem programu SciLab.
Rys. 2.11. Schemat blokowy układu w programie SciLab (xcos) do rysowania
charakterystyk skokowych
13
Wyszukiwarka
Podobne podstrony:
9 Ch ka zadymienia zadymienie
9 Ch ka zadymienia tabelki
ch-ka ogolna, IV semestr, Silniki
9 Ch ka zadymienia L4
9 Ch ka zadymienia L1
9 Ch ka zadymienia ch ka zadymien (2)
Ch ka mechaniczna
ch-ka szybkościowa regulatorowa ZS opis, SiMR, Laboratorium Silników spalinowych
ch ka wyjsciowa
Zaburzenia mowy ch-ka, psychopatologia, logopedia
SIECI O TOPOLOGII SZYNY - OGÓLNA CH-KA, Notatki, Elektronika AGH III rok, Pendrive, dodatkowe, moje
ch-ka ogolna, STUDIA WRZESIEŃ, Silniki sprawka, oD SUBERLAKA, silniki spalinowe, Sprawka
ch-ka szybkościowa regulatorowa ZS, SiMR, Laboratorium Silników spalinowych
9 Ch ka zadymienia L2
CH-ka zewn., silniki spalinowe
ch-ka zewnetrzna silnika, STUDIA WRZESIEŃ, Silniki sprawka, oD SUBERLAKA, silniki spalinowe, Sprawka
ch ka przejsciowa
9 Ch ka zadymienia wykresy
więcej podobnych podstron