
17. MODELE MATERIAŁÓW
1
17.
17. Modele materiałów
17.1. Wprowadzenie
Podstawowym modelem w mechanice jest model ośrodka ciągłego. Przyjmuje się, że materia wypełnia
przestrzeń w sposób ciągły. Możliwe jest wyznaczenie stanu naprężenia i odkształcenia w dowolnym punkcie
ciała.
W wykładzie tym zostaną omówione modele materiału w zakresie właściwości fizycznych danego materiału.
Modele można podzielić na cztery podstawowe grupy:
1. modele myślowe,
2. modele fizyczne,
3. modele mechaniczne,
4. modele matematyczne.
Model myślowy jest wytworem myśli ludzkiej. Cechuje go subiektywność. Model ten jest podstawą poznania
materiałów i rozwoju inżynierii materiałowej. Potwierdzenie doświadczalne modelu myślowego prowadzi do
modelu fizycznego.
Przez model fizyczny rozumie się uproszczony obraz materiału zawierający zbiór istotnych informacji o jego
naturze fizycznej. Model ten jest także niesformalizowany pod względem matematycznym. Tworzenie modelu
fizycznego powinno poprzedzać ustalenie:
•
celu modelowania materiału,
•
praw fizycznych spełnionych przez materiał,
•
cech jakościowych i ilościowych właściwości materiału.
Poprzez cechy jakościowe rozumie się alternatywność cech badanego materiału:
•
liniowość lub nieliniowość,
•
ciągliwość lub dyskretność występowania danej właściwości,
•
zdeterminowany lub losowy charakter wybranej właściwości,
•
stacjonarność lub niestacjonarność występowania danej właściwości.
Przez cechy ilościowe właściwości materiałów rozumie się miarę wielkości ilościowych właściwości, jak i
również ich wartości liczbowe. Decyzje podjęte na etapie modelowania fizycznego mają podstawowe
znaczenie przy formułowaniu modelu matematycznego.
Przez model mechaniczny materiału rozumie się układ mechaniczny symulujący właściwości mechaniczne
danego materiału. W modelu mechanicznym naprężenie normalne zastępuje się siłą a odkształcenie liniowe
przemieszczeniem punktu przyłożenia siły.
Model matematyczny materiału jest to zbiór wiadomości o jego właściwościach wyrażony za pomocą zapisu
matematycznego. Modelowaniem matematycznym materiału nazywa się przebieg tworzenia sformalizowanego
opisu właściwości materiału. Za pomocą zależności matematycznych opisuje się tylko właściwości
wykazywane przez model fizyczny. Oznacza to, że model fizyczny przesądza o postaci modelu
matematycznego.
Prof. dr hab. inż. Andrzej Garstecki
Dr inż. Janusz Dębiński
AlmaMater
17. MODELE MATERIAŁÓW
2
Odmiennym kierunkiem modelowania materiałów jest modelowanie z zachowaniem podobieństwa.
Wykorzystując właściwości jednego materiału, którymi najczęściej są różnego rodzaju kompozycje żywiczno-
woskowo-plastelinowe, można określić właściwości na przykład metali. Bardzo prosto określa się
podobieństwo, jeżeli oba materiały mają linową zależność pomiędzy naprężeniem i odkształceniem.
Oryginalny materiał M ma granicę plastyczności określoną jako
σ
pl
i odpowiadające odkształcenie
ε
pl
natomiast materiał modelowy M' ma granicę plastyczności określoną jako
σ
pl
' i odpowiadające odkształcenie
ε
pl
'. Materiały M i M' będą podobne w sensie mechanicznym jeżeli
'=⋅
'=⋅
,
(17.1)
w którym
α
i
β
nazywane są mnożnikami podobieństwa.
Jeżeli dla materiału oryginalnego M związek fizyczny będzie miał postać
=F
(17.2)
to dla materiału modelowego M' związek fizyczny będzie miał postać
'
=F
'
(17.3)
Jeżeli mnożniki podobieństwa równają się jeden to mamy do czynienia z materiałami identycznymi.
17.2 Podstawowe modele materiałów
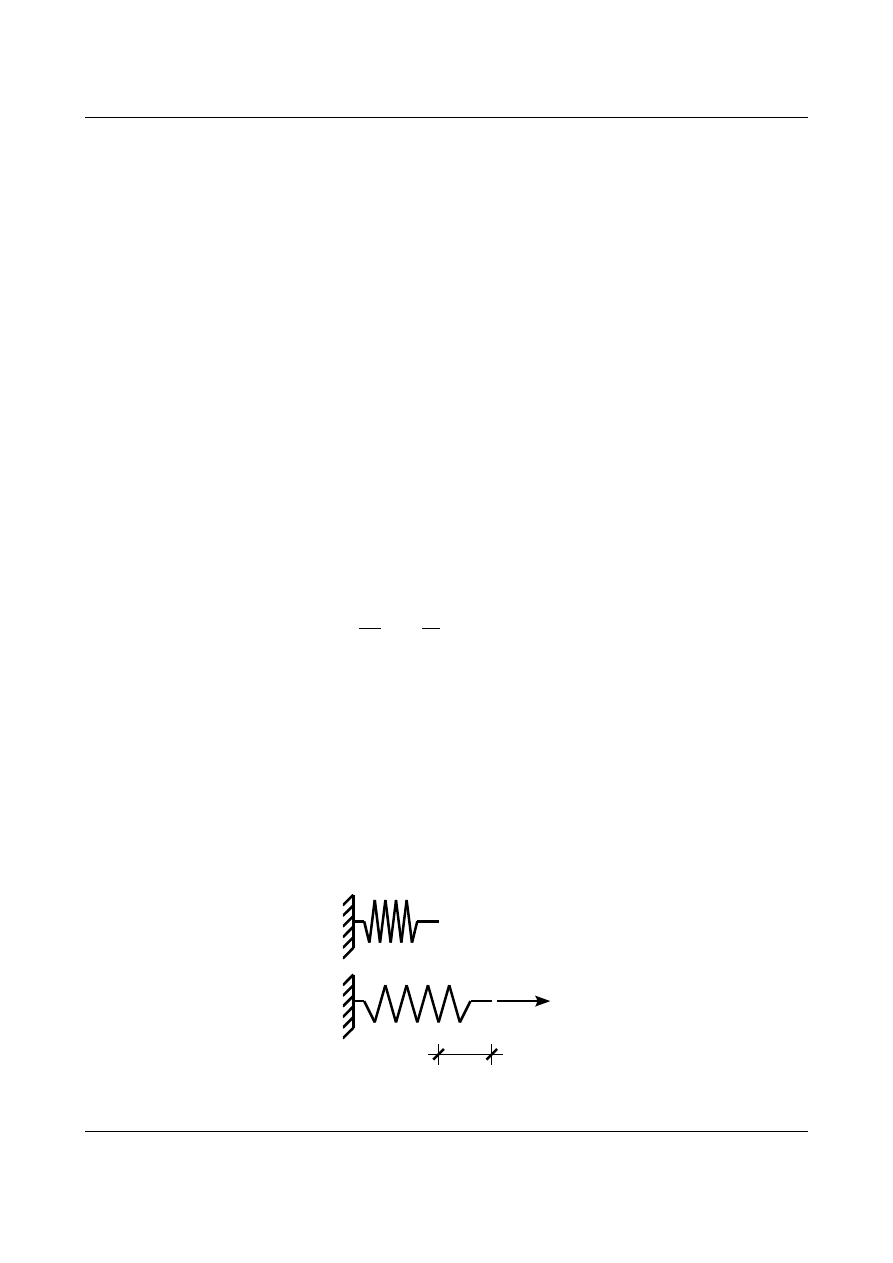
Jak wiadomo materiały sprężyste wyróżniają się spośród innych materiałów tym, że po ustaniu
obciążenia materiały te wracają do swojej pierwotnej postaci. Modelem mechanicznym materiału sprężystego
jest sprężyna pokazana na rysunku 17.1. Wzrost siły Q powoduje wzrost przemieszczenia u. Jeżeli siła Q
zmaleje do zera to sprężyna wróci do swojej pierwotnej postaci.
Q
u
Rys. 17.1. Model materiału sprężystego.
Prof. dr hab. inż. Andrzej Garstecki
Dr inż. Janusz Dębiński
AlmaMater
17. MODELE MATERIAŁÓW
3
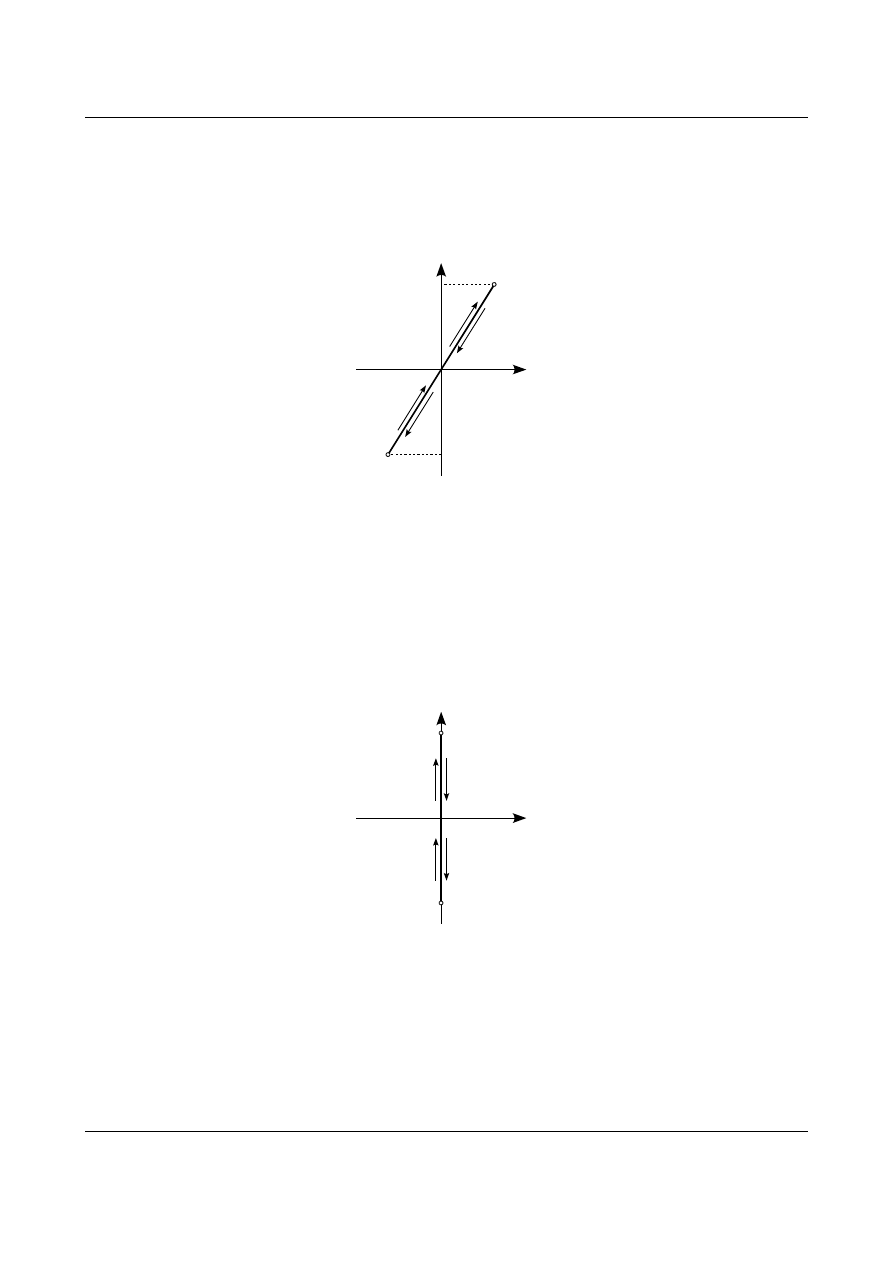
W wykładach numer 13 i 14 zostały omówione równania fizyczne dla materiału izotropowego, ortotropowego
oraz materiału wykazującego izotropię transwersalną. Zakres stosowania tych równań ograniczony jest
granicą sprężystości. Zatem równania te są podstawą modelu materiału liniowo sprężystego. Charakterystyka
materiału liniowo sprężystego została przedstawiona na rysunku 17.2.
sp
sp
Rys. 17.2. Charakterystyka materiału liniowo sprężystego.
Materiał liniowo sprężysty przedstawiony na rysunku 17.2 jest materiałem, który przenosi zarówno
naprężenia ściskające jak i rozciągające.
Szczególnym przypadkiem materiału liniowo sprężystego jest materiał sztywny, a więc nieodkształcalny.
Cechują go wartości modułów Younga oraz Kirchhoffa równe nieskończoności natomiast wartości
współczynnika Poissona nie da się określić. Charakterystyka materiału sztywnego została przedstawiona na
rysunku 17.3.
sp
sp
Rys. 17.3. Charakterystyka materiału sztywnego.
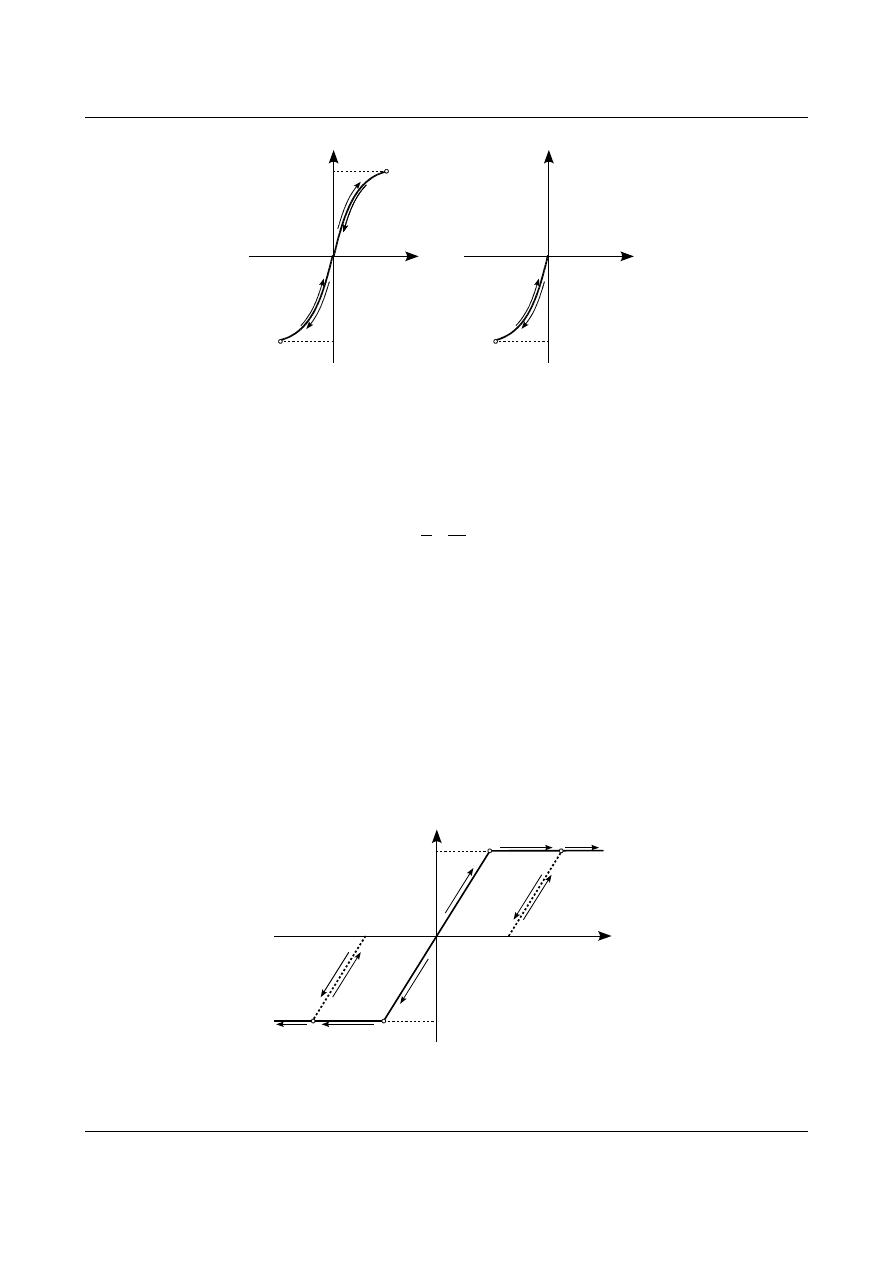
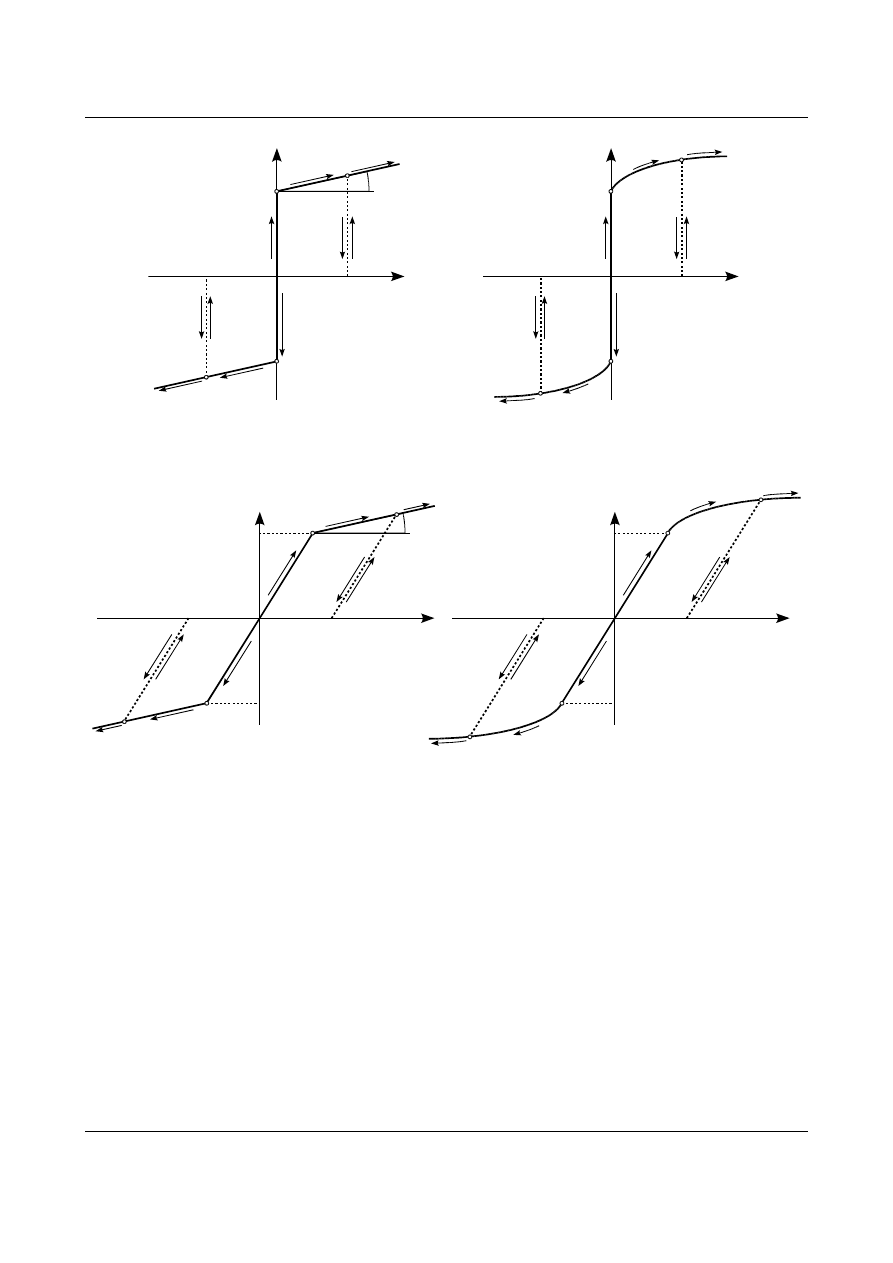
Istnieją jednak materiały (jak na przykład beton i skały naturalne), których zachowania sprężystego nie da się
opisać modelami liniowymi. Należy zastosować wtedy model nieliniowo-sprężysty. W modelu tym zależność
pomiędzy naprężeniem i odkształceniem opisuje się za pomocą funkcji nieliniowej. Charakterystyka takiego
materiału została przedstawiona na rysunku 17.4. Wykres po lewej stronie przedstawia charakterystykę
materiału przenoszącego rozciąganie i ściskanie. Wykres po prawej stronie jest charakterystyką betonu, który
pracuje tylko do wytrzymałości na ściskanie f
d
.
Prof. dr hab. inż. Andrzej Garstecki
Dr inż. Janusz Dębiński
AlmaMater
17. MODELE MATERIAŁÓW
4
sp
sp
f
d
beton
Rys. 17.4. Charakterystyka materiału nieliniowo-sprężystego.
Jednym z przykładów charakterystyki betonu jest tak zwana parabola madrycka. Definiuje się ją jako
=E
0
⋅⋅
[
1
−
1
2
⋅
R
]
,
(17.4)
w którym E
0
oznacza początkowy moduł Younga dla betonu natomiast
ε
R
oznacza odkształcenia, które
występują, gdy beton osiągnie wytrzymałość na ściskanie f
d
. Zazwyczaj przyjmuje się wartość
ε
R
równą
0,002.
Materiał plastyczny to taki materiał, który doznaje trwałych odkształceń nazywanych odkształceniami
plastycznymi. Szczególnym przypadkiem modelu materiału plastycznego jest model idealnie plastyczny. W
modelu tym materiał ulega uplastycznieniu przy ustalonym naprężeniu zastępczym. Najczęściej tym
naprężeniem jest granica plastyczności, którą przyjmuje się równą granicy sprężystości. Istnieją dwa rodzaje
modelu idealnie plastycznego: model sprężysto idealnie plastyczny i model sztywno idealnie plastyczny.
Charakterystykę materiału sprężysto idealnie plastycznego przedstawia rysunek 17.5.
pl
=
sp
pl
=
sp
Rys. 17.5. Charakterystyka materiału sprężysto idealnie plastycznego.
Prof. dr hab. inż. Andrzej Garstecki
Dr inż. Janusz Dębiński
AlmaMater
17. MODELE MATERIAŁÓW
5
W modelu tym całkowite odkształcenie składa się odkształcenia sprężystego
ε
sp
oraz odkształcenia
plastycznego
ε
pl
. Jeżeli odkształcenie sprężyste
ε
sp
wynosi zero to materiał jest modelowany modelem sztywno
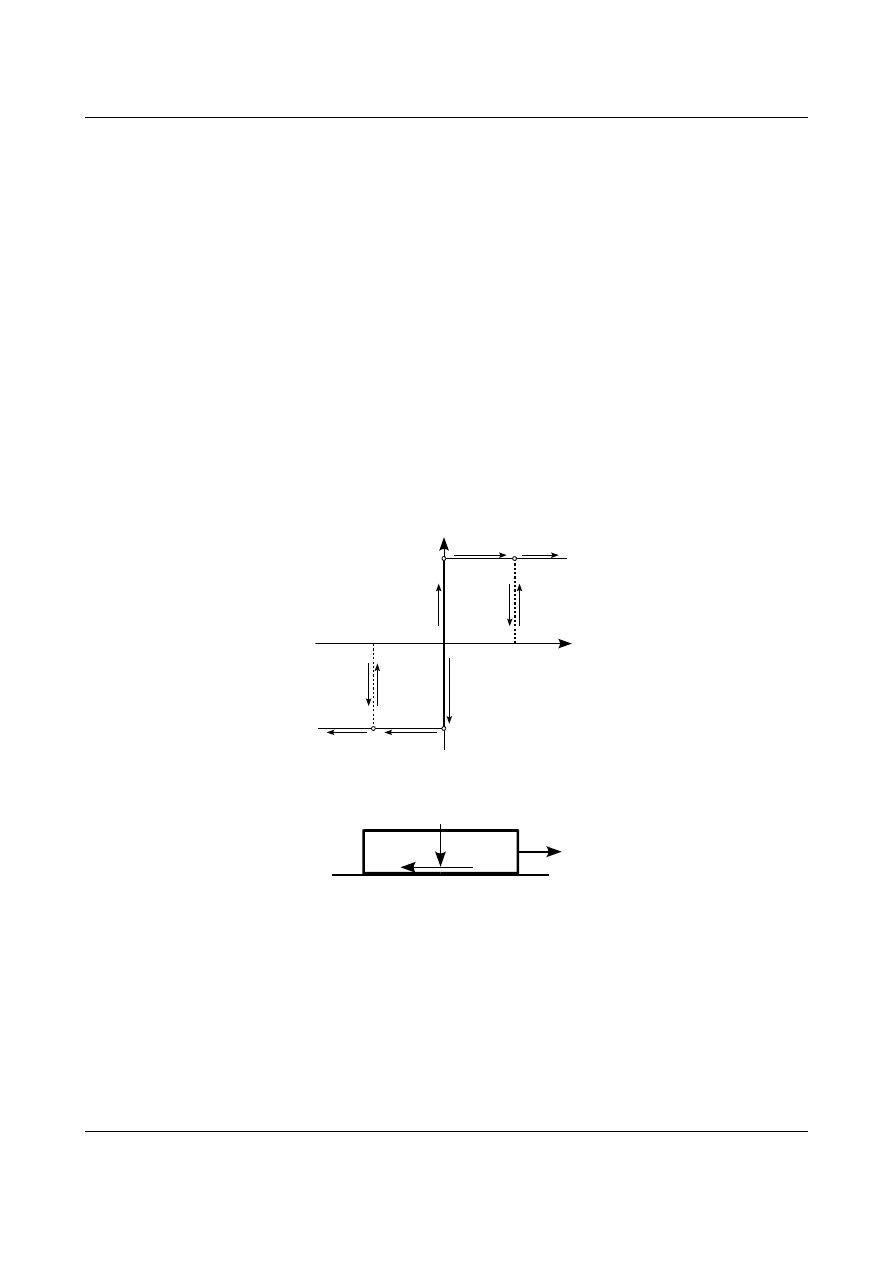
idealnie plastycznym. Charakterystykę takiego materiału przedstawia rysunek 17.6. W modelu tym całkowite
odkształcenie równa się tylko odkształceniu plastycznym
ε
pl
.
Materiał sztywno idealnie plastyczny modeluje się mechanicznie za pomocą klocka w, którym występuje siła
tarcia według prawa Coulomba. Schemat został przedstawiony na rysunku 17.7. Jak wiadomo siła tarcia jest
zależna od siły normalnej N. Jeżeli siła Q będzie mniejsza niż siła tarcia spoczynkowego T to przemieszczenia
klocka u będą wynosiły zero. Jeżeli siła Q będzie równa sile tarcia to obie siły będą w równowadze i klocek
będzie się mógł poruszać ruchem jednostajnym prostoliniowym czyli przemieszczenia u będą różne od zera.
W przypadku niektórych materiałów (na przykład stal niskowęgolwa, rys. 13.4) po przekroczeniu granicy
plastyczności naprężenia normalne wzrastają czyli materiał taki ulega wzmocnieniu. Materiały takie modeluje
się za pomocą modeli: sztywno-plastycznego ze wzmocnieniem oraz sprężysto-plastycznego ze
wzmocnieniem. Wzmocnienie może być liniowe lub nieliniowe. Na rysunku 17.8 przedstawiono
charakterystykę materiału sztywno-plastycznego ze wzmocnieniem liniowym oraz nieliniowym. Na rysunku
17.9 przedstawiono charakterystykę materiału sprężysto-plastycznego ze wzmocnieniem liniowym oraz
nieliniowym. Dla modeli z liniowym wzmocnieniem tangens kąta nachylenia prostej wzmocnienia
β
nazywa
się modułem wzmocnienia.
pl
=
sp
pl
=
sp
Rys. 17.6. Charakterystyka materiału sztywno idealnie plastycznego.
Q
N
T
Rys. 17.7. Model mechaniczny materiału sztywno idelanie plastycznego.
Chcąc opisać modele plastyczne należy sformułować warunek plastyczności. W przypadku osiowego
rozciągania lub ściskania warunek plastyczności pokrywa się z granicą plastyczności. W ogólnym przypadku
warunkiem plastyczności nazywamy funkcję składowych tensora naprężenia, która spełnia warunki
F
ij
{
<0 dla materiału sprężystego lub sztywnego
=0 dla materiału uplastycznionego
.
(17.5)
Prof. dr hab. inż. Andrzej Garstecki
Dr inż. Janusz Dębiński
AlmaMater
17. MODELE MATERIAŁÓW
6
pl
=
sp
pl
=
sp
pl
=
sp
pl
=
sp
wzmocnienie liniowe
wzmocnienie nieliniowe
Rys. 17.8. Charakterystyka materiału sztywno-plastycznego ze wzmocnieniem.
pl
=
sp
pl
=
sp
pl
=
sp
pl
=
sp
wzmocnienie liniowe
wzmocnienie nieliniowe
Rys. 17.9. Charakterystyka materiału sprężysto-plastycznego ze wzmocnieniem.
Funkcja (17.5) opsiująca warunek plastyczności zostanie dokładnie omówiona w wykładzie dotyczącym
hipotez wytrzymałościowych.
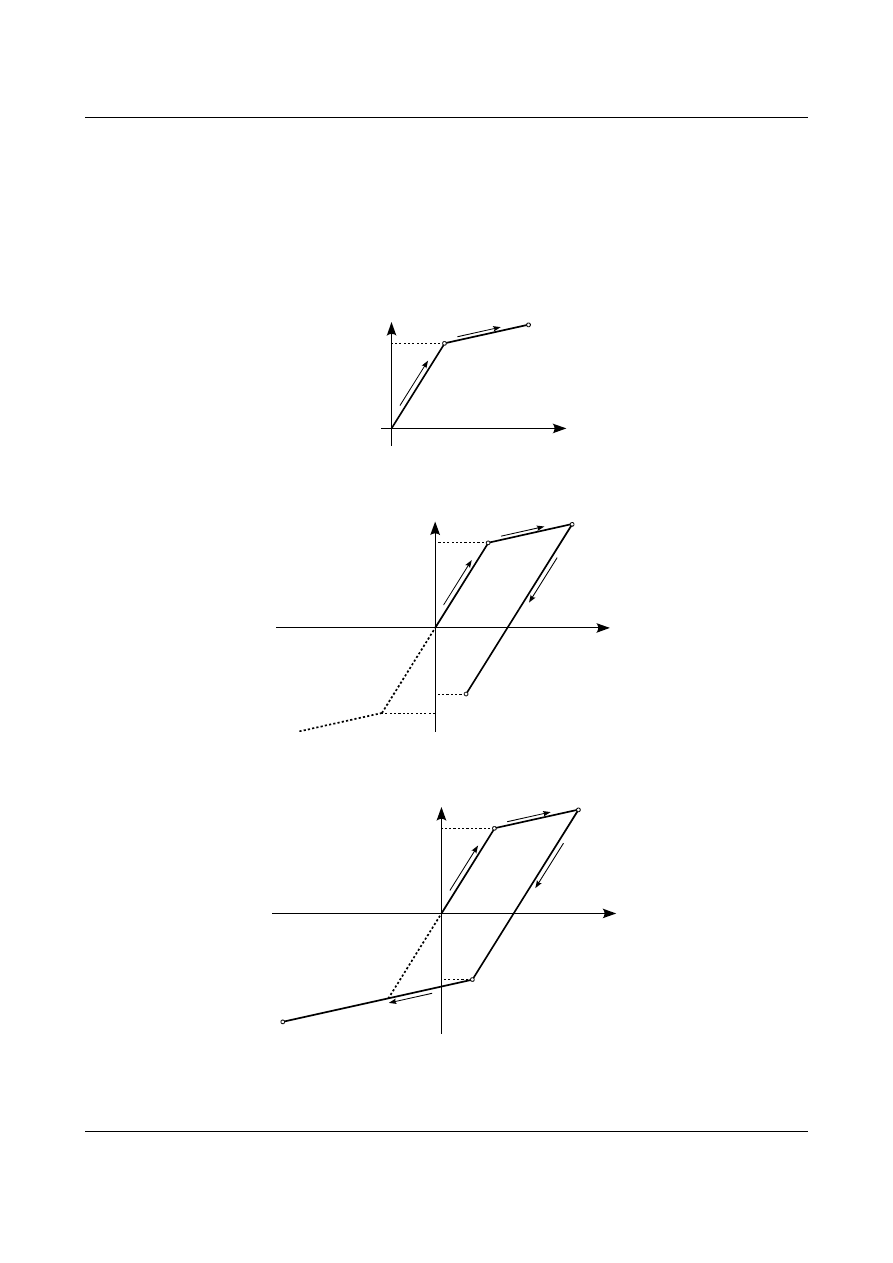
17.3 Efekt Bauschingera
Efekt ten występuje w materiałach sprężysto-plastycznych ze wzmocnieniem. Próbka wykonana z
takiego materiału jest rozciągana naprężeniem większym od granicy plastyczności. Na rysunku 17.10 jest to
punkt A. Jeżeli od punktu A próbka będzie najpierw odciążona a następnie odciążania naprężeniem
przeciwnego znaku (ściskającym) to odkształcenia plastyczne
σ
pl
1
(rysunek 17.11 - punkt B) pojawią się przy
mniejszej niż początkowo wartości bezwzględnej naprężenia. Linią przerywaną zaznaczono pierwotny
przebieg zależności pomiędzy naprężeniami a odkształceniami. Różnica naprężeń pomiędzy punktem A i B
wynosi podwojoną bezwzględną wartość pierwotnej granicy plastyczności. W dalszym ciągu próbka będzie
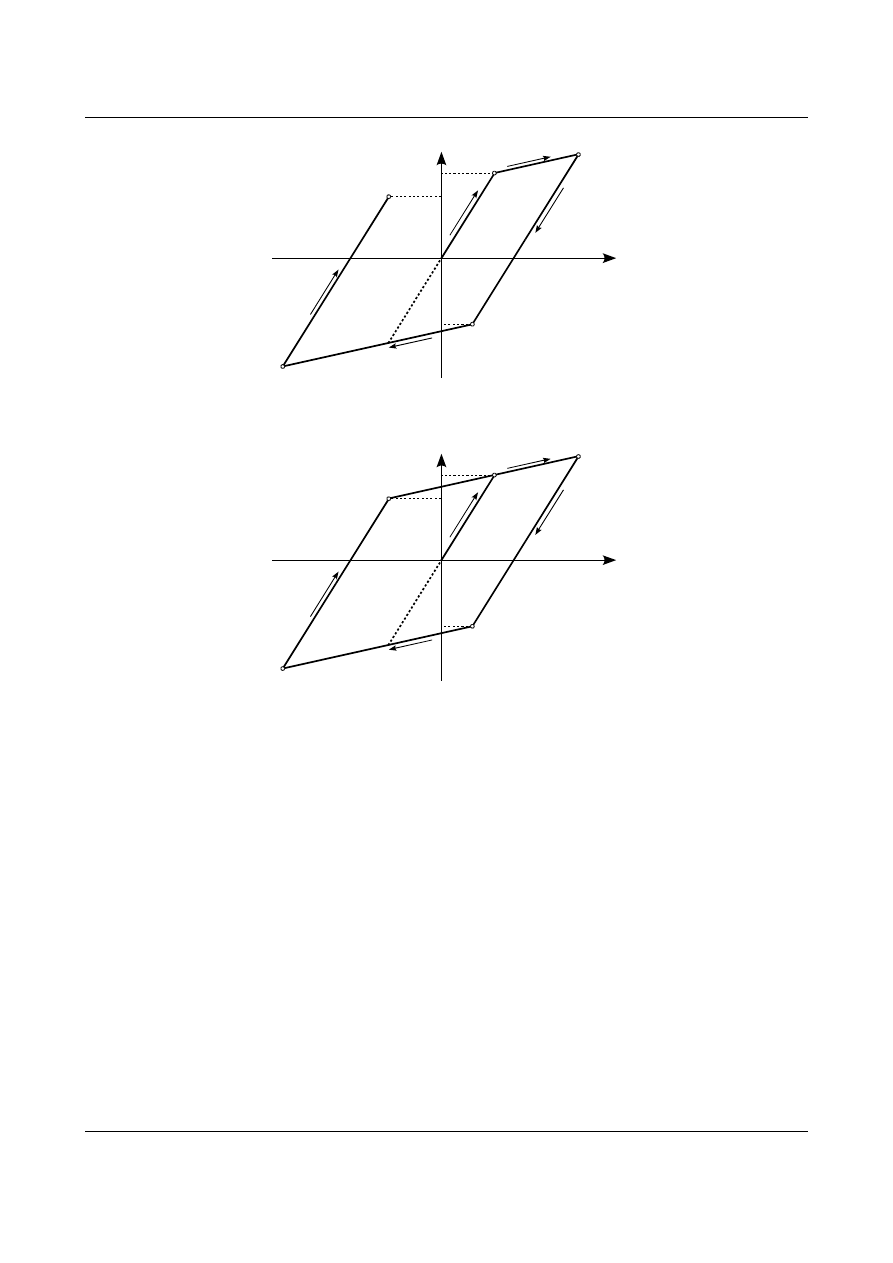
ściskana do punktu C przedstawionego na rysunku 17.12. Po osiągnięciu punktu C próbka będzie odciążona a
następnie rozciągana. Następne odkształcenia plastyczne pojawią się w punkcie D. Różnica pomiędzy
Prof. dr hab. inż. Andrzej Garstecki
Dr inż. Janusz Dębiński
AlmaMater
17. MODELE MATERIAŁÓW
7
punktami C i D będzie także równa podwojonej wartości bezwzględnej pierwotnej granicy plastyczności.
Przedstawia to rysunek 17.13. Na koniec zwiększając naprężenie rozciągające możliwy jest powrót do punktu
A. Przedstawia to rysunek 17.14. Jak widać zjawisko Bauschingera polega na zmniejszeniu granicy
plastyczności w stosunku do obciążenia przeciwnego znaku. Inaczej mówiąc zwiększenie granicy
plastyczności w jednym kierunku działania obciążenia powoduje zmniejszenie jej w kierunku przeciwnym.
Różnica pomiędzy obiema granicami plastyczności pozostaje stała i równa się podwojonej wartości
bezwzględnej pierwotnej granicy plastyczności.
pl
=
sp
A
Rys. 17.10. Pierwszy etap zjawiska Bauschingera.
pl
=
sp
A
pl
=
sp
pl
1
B
Rys. 17.11. Drugi etap zjawiska Bauschingera.
pl
=
sp
A
pl
=
sp
pl
1
B
C
Rys. 17.12. Trzeci etap zjawiska Bauschingera.
Prof. dr hab. inż. Andrzej Garstecki
Dr inż. Janusz Dębiński
AlmaMater
17. MODELE MATERIAŁÓW
8
pl
=
sp
A
pl
=
sp
pl
1
B
C
D
pl
2
Rys. 17.13. Czwarty etap zjawiska Bauschingera.
pl
=
sp
A
pl
=
sp
pl
1
B
C
D
pl
2
Rys. 17.14. Ostatni etap zjawiska Bauschingera.
Prof. dr hab. inż. Andrzej Garstecki
Dr inż. Janusz Dębiński
AlmaMater

17. MODELE MATERIAŁÓW
9
(17.1)
Prof. dr hab. inż. Andrzej Garstecki
Dr inż. Janusz Dębiński
AlmaMater
Wyszukiwarka
Podobne podstrony:
17 Modele zarządzania zasobami ludzkimi
Rozdział 17, S. Rudnik - materiałoznawstwo
17 z 21, materiały do egzaminu
17. Modele obliczeniowe konstrukcji obiektĂłw budowlanych, egzamin inz
wojna obronna po 17 IX, materiały na losy 1921-1945
Makiety, modele i materiały graficzne GAJEWSKI KIENDRACKI
Finanse Przedsiębiorstw 17 11 2012 materiały 2
Modele budowy materii
gielda 30.11 godz 17, 6 rok WOJSKOWO-LEKARSKI cały rok wszystkie materiały, materiały 6 rok woj-lek,
sekuła, inżynieria materiałowa - semestr 4, Inżynieria Materiałowa pwr - semestr 4, Chemia Fizyczna,
materiay na egzamin ustny - prowadzenie zajec, 17.Używanie świateł zewnętrznych, Zmiana kierunku lub
materiay na egzamin ustny - prowadzenie zajec, 17.Używanie świateł zewnętrznych, Zmiana kierunku lub
Finanse Przedsiębiorstw materiały 2 17 11 2012
Mat termoizol gr 10 ponoc zzzz wnioskami, Poniedziałek - Materiały wiążące i betony, 07. (17.11.201
więcej podobnych podstron