Cel zadania:
Celem zadania jest zapoznanie się z działaniem elektrycznych łączników krańcowych.
Opis problemu:
Należy zamodelować i zbudować elektropneumatyczny układ sterowania z
zastosowaniem zaworu elektropneumatycznego impulsowego 5/2, w którym wysunięcie
tłoczyska siłownika dwustronnego działania nastąpi po naciśnięciu przycisku S1 (Start/Stop),
natomiast wycofanie tłoczyska będzie się odbywało samoczynnie.
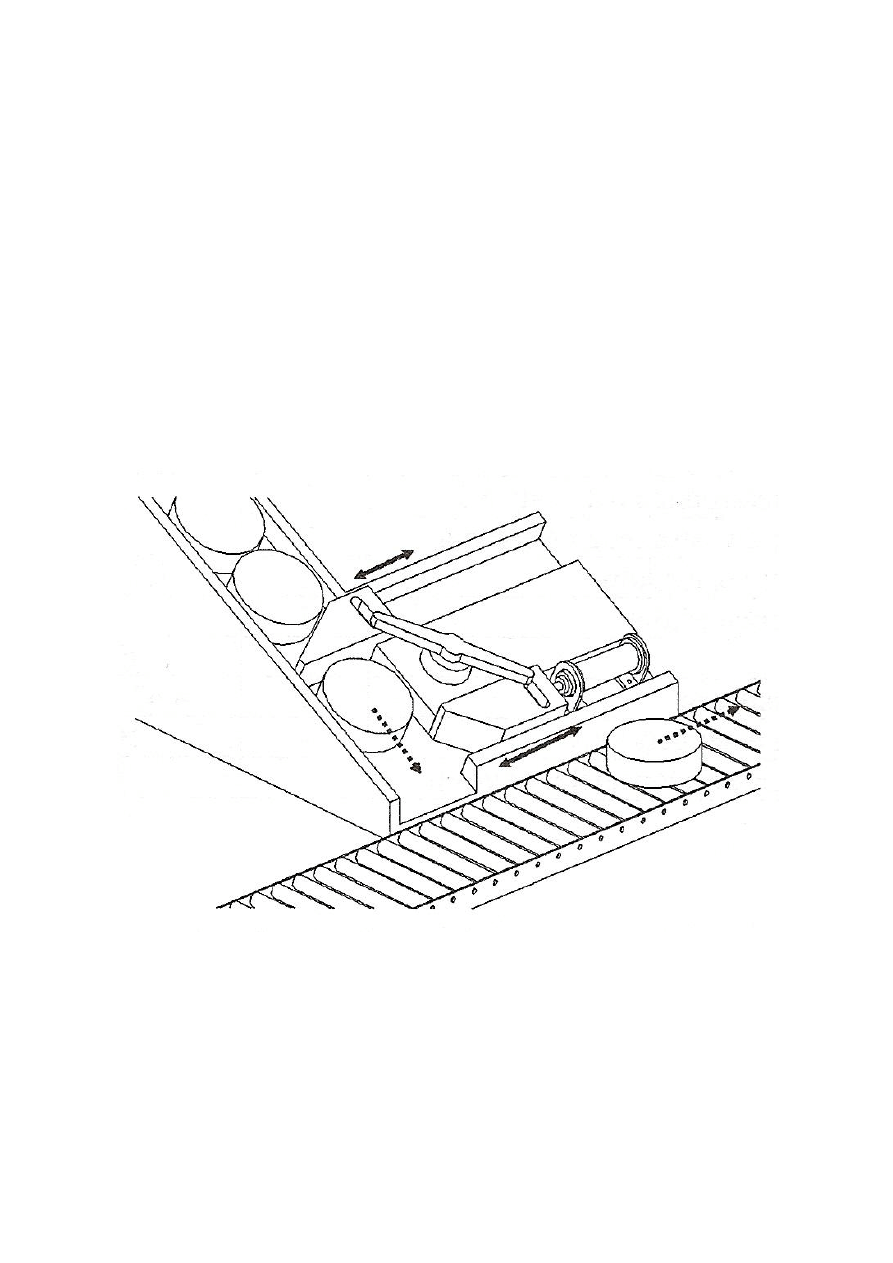
Szkic urządzenia rozdzielającego elementy
Opis oczekiwanego działania:
Siłownik dwustronnego działania powoduje opadanie elementów na taśmę
transportera. Start siłownika następuje za pomocą przycisku ręcznego S1 (Start/Stop). Po
wysunięciu się tłoczyska siłownika działaniu zostaje poddany łącznik krańcowy S3. W takiej
sytuacji zawór powraca do poprzedniej pozycji, a tłoczysko siłownika wycofuje się
samoczynnie. Kolejne wysuniecie tłoczyska siłownika może nastąpić dopiero po osiągnięciu
jego tylnego położenia. Praca ciągła.

Zadania do wykonania:
Zad. 1
Przeprowadzić studium możliwości i potrzeby zastosowania odpowiednich
pneumatycznych i elektropneumatycznych elementów sterujących i wykonawczych.
Zad. 2
Dokonać syntezy poszukiwanego układu sterowania.
Zad. 3
W edytorze graficznym programu FluidSIM-P utworzyć wirtualny układ sterowania,
zgodnie ze schematem, zbudowanym w zad. 2, a następnie przeprowadzić symulację
działania tego układu.
Zad. 4
Stworzyć w tabeli zestawienie niezbędnych elementów użytych w ćwiczeniu (wraz z
oznaczeniami)
Lp.
Nazwa elementu
Schemat
1.
2.
3.
…
10
Zad. 5
Wymienić działania związane z doborem, montażem, podłączeniem i uruchomieniem
stworzonego układu.
Zad. 6.
Wnioski
Wyszukiwarka
Podobne podstrony:
Cw nr 09 Elektropneumatyczne sterowanie
Cw nr 12 Elektropneumatyczne sterowanie
Cw nr 14 Elektropneumatyczne sterowanie
Ćw nr 16. Kondensator, Kondensatorem nazywa si? dwa przewodniki elektryczne, odizolowane od siebie n
INSTRUKCJE, Ćw nr 16. Kondensator, Kondensatorem nazywa się dwa przewodniki elektryczne, odizolowane
Ćw nr 01 Pneumatyczne sterowanie ruchem łyżki odlewniczej w urządzeniu do zalewania form odlewniczy
Ćw nr 16
więcej podobnych podstron