
LABORATORIUM
PODSTAWY
ELEKTRONIKI
PRZERZUTNIKI

2
Cel ćwiczenia
Zapoznanie się z budową i zasada działania przerzutników synchronicznych jak i
asynchronicznych. Poznanie przerzutników asynchronicznych odniesione jest do
przerzutników zrealizowanych na bramkach NAND i NOR, natomiast synchronicznych do
przerzutników typu JK, oraz D. Program ćwiczenia ma zostać zrealizowany na praktycznym
zestawieniu układów przerzutników do wymaganych zastosowań.
Przebieg ćwiczenia:
1.
Zapoznanie się z zasada działania przerzutników asynchronicznych RS wykonanych
jako układ bramek NAND oraz NOR. Następnie przerzutników synchronicznych D,
JK, T występujących na danym stanowisku laboratoryjnym, korzystając z instrukcji
2.
Przeprowadzić analizę stanów wyjściowych dla każdego przerzutnika
asynchronicznego.
3.
Ustalić odpowiedni poziom napięcia wejściowego oraz częstotliwość do prawidłowej
obserwacji sygnałów wyjściowych dla przerzutnika synchronicznego
4.
Przeprowadzić analizę stanów wyjściowych dla każdego przerzutnika
synchronicznego
5.
Zaprojektować i wykonać licznik modulo 2, oraz modulo 3 na przerzutnikach JK.
Liczniki maja zliczać w przód i tył. Przeprowadzić analizę stanów wyjściowych dla
każdego z liczników
6.
Zaprojektować i wykonać przerzutnik D zbodowany na przerzutnikach JK.
Przeprowadzić analizę stanów wyjściowych dla każdego z liczników
7.
Wyniki ćwiczenia umieścić w sprawozdaniu
3
Wiadomości podstawowe:
1.
Przerzutniki synchroniczne
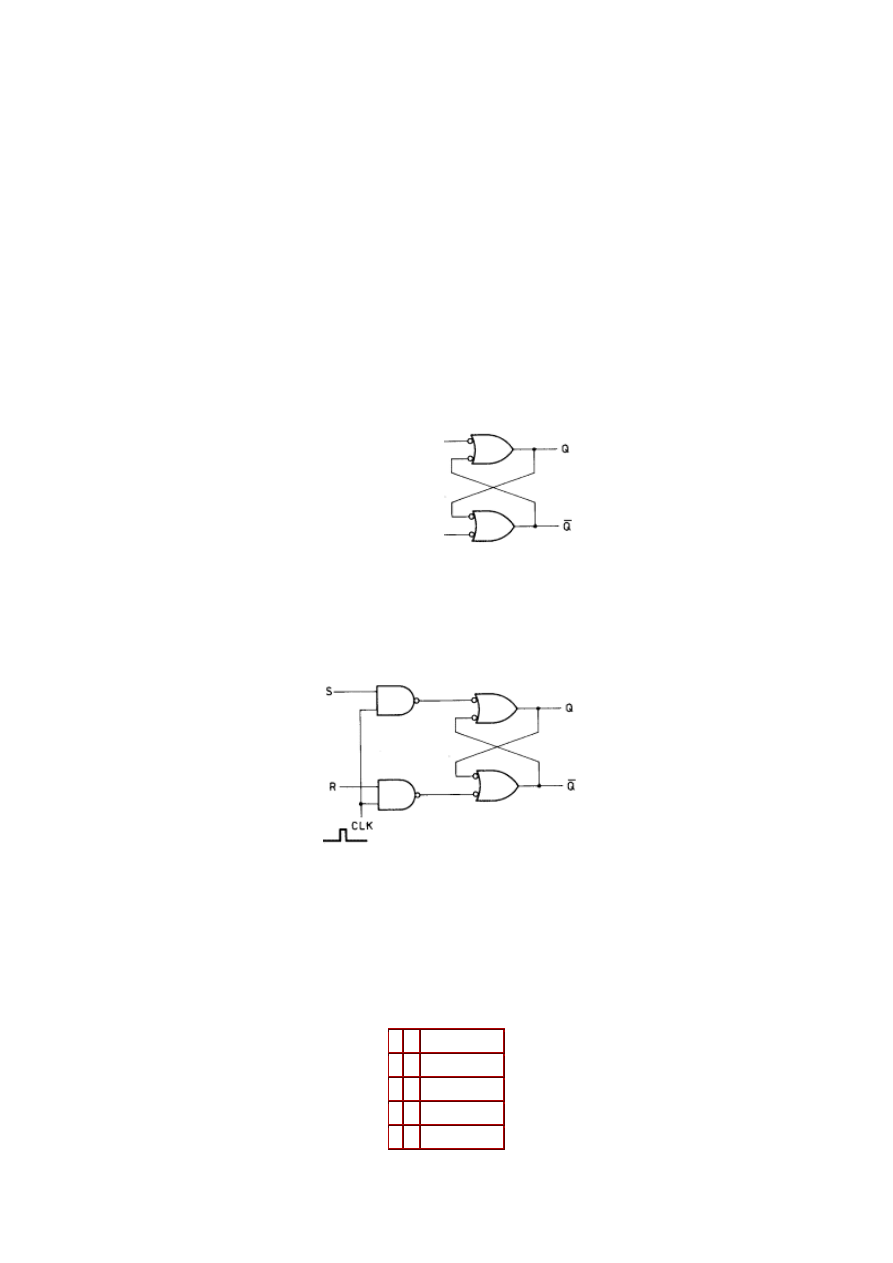
Przerzutniki zrobione z dwóch bramek, takie jak na rysunku 1, jest znany jako przerzutnik RS
(ang. set-reset) albo asynchroniczny (ang. jam loaded). Wymuszenie jednego lub drugiego
stanu takiego przerzutnika jest możliwe w dowolnej chwili przez doprowadzenie do
właściwego wejścia odpowiedniego sygnału wejściowego. Stosuje się je do usuwania drgań
zestyków i w wielu innych układach. Jednak najczęściej używane przerzutniki wyglądają
nieco inaczej. Zamiast dwóch wejść asynchronicznych mają dwa wejścia "danych" i jedno
wejście "zegarowe". Stan wyjścia może się zmieniać lub pozostać niezmieniony; zależy to od
stanu linii wejściowych (danych) tylko w czasie trwania impulsu zegara.
Rys. 1.
Schemat najprostszego przerzutnika taktowanego (synchronicznego)
.
Rys. 2.
Przerzutnik taktowany.
Jest to po prostu zwykły przerzutnik RS i para bramek (sterowanych przebiegiem
taktującym), które odblokowują wejścia zerujące i ustawiające. Łatwo sprawdzić, że jego
tablicą prawdy jest:
S
R
Q
n+1
0
0
Q
n
0
1
0
1
0
1
1
1
nieokreślony
R
S
4
gdzie Q
n+1
oznacza stan wyjścia po przejściu impulsu zegara, a Q
n
- stan wyjścia przed
pojawieniem się impulsu zegara. Podstawowa różnica między tym i poprzednimi
przerzutnikami polega na tym, że R i S mają teraz charakter wejść danych. Stan tych wejść w
czasie trwania impulsu zegara wymusza zachowanie się wyjścia Q. Przerzutnik ten ma jednak
jedną niewygodną właściwość. Stan wyjścia może zmieniać się w odpowiedzi na stan wejść,
gdy sygnał taktujący jest w stanie wysokim. W tym sensie jest to w dalszym ciągu przerzutnik
asynchroniczny (znany jest pod nazwą "przezroczystego zatrzasku", ang. transparent latch,
ponieważ jego wyjście "widzi" wejście, gdy sygnał taktujący jest w stanie wysokim)
5)
.
Prawdziwie pożyteczne przerzutniki to układy o nieco innych strukturach: przerzutnik
dwuzboczowy (ang. master-slave flip flop) i przerzutnik wyzwalany zboczem (ang. edge-
triggered flip-flop).
2. Przerzutniki dwuzboczowe i wyzwalane zboczem
Są to najbardziej popularne przerzutniki. Dane ustalone w liniach wejściowych tuż przed
zmianą stanu zegara, czyli jego "zboczem", wyznaczają stan wyjść ustalający się po przejściu
impulsu taktującego. Z uwagi na to, że są powszechnie dostępne w postaci tanich układów
scalonych, nie konstruuje się ich nigdy samodzielnie. Warto jednak zaznajomić się z ich
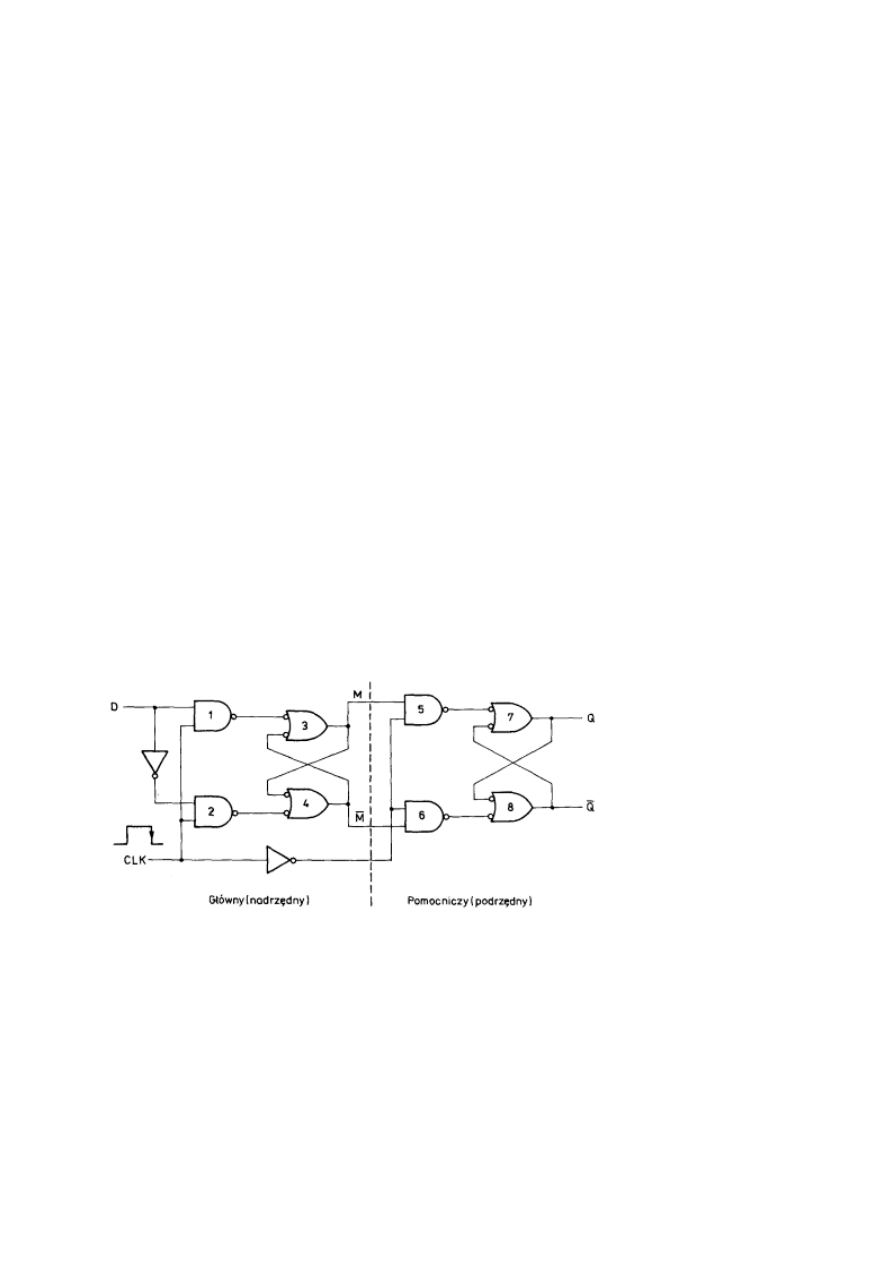
strukturą wewnętrzną, co pomoże zrozumieć zasadę ich działania. Na rys. 3a i 3b
przedstawiono odpowiednie schematy ideowe.
Rys. 3a.
5
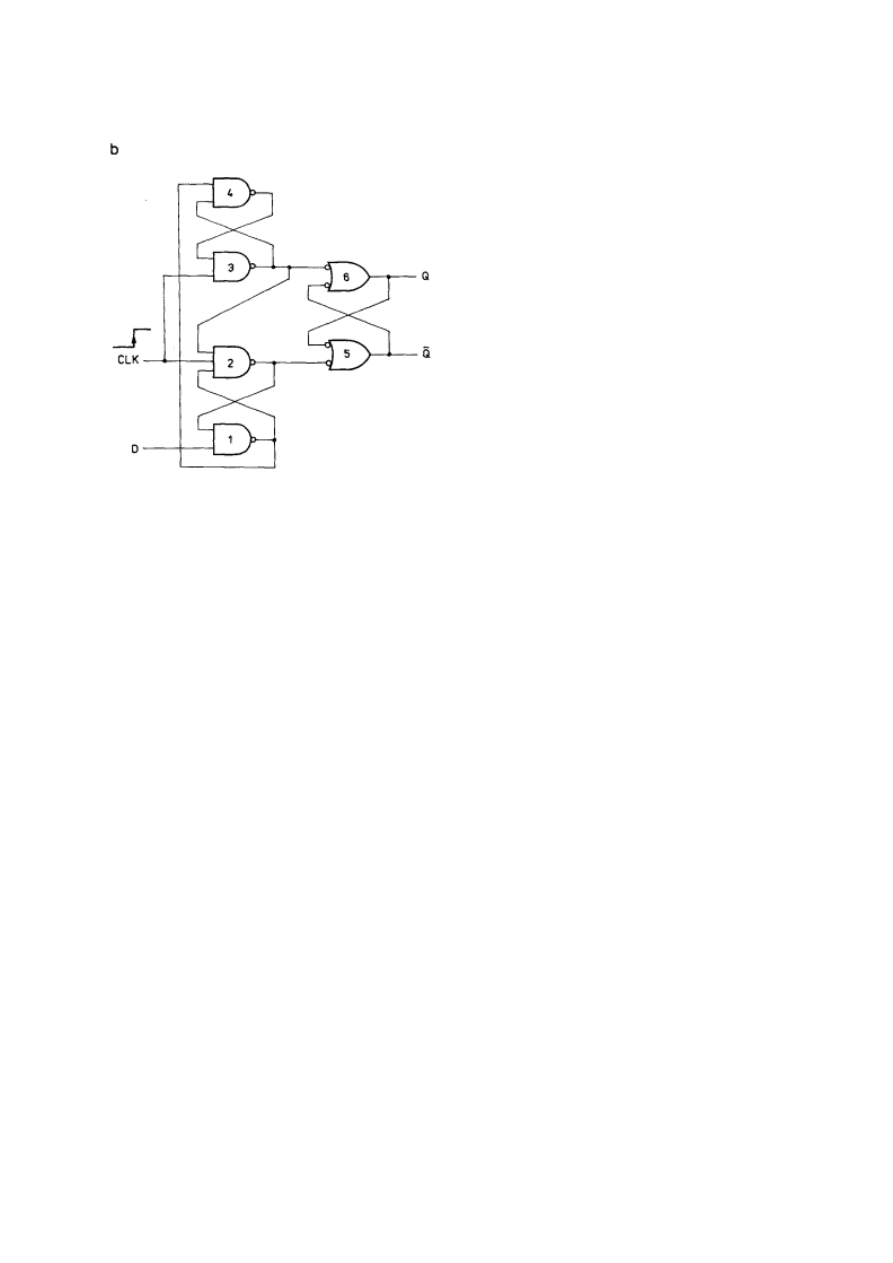
Rys. 3b.
- Przerzutniki D wyzwalane zboczem
Oba układy to przerzutniki typu D. Stan wejścia D pojawi się na wyjściu po zakończeniu
impulsu zegara. Zasada działania przerzutnika dwuzboczowego będzie prawdopodobnie
łatwiejsza do zrozumienia. Oto jak on działa. Kiedy sygnał taktujący jest w stanie wysokim,
bramki 1 i 2 są odblokowane, wymuszając na pierwszym przerzutniku - wykonanym z
bramek 3 i 4 i nazywanym głównym (ang. master) - taki sam stan, jaki panuje na wejściu D:
M = D, M' = D'. Bramki 5 i 6 są zablokowane, więc drugi przerzutnik - wykonany z bramek 6
i 7 i nazywany pomocniczym (ang. slave) - zachowuje poprzedni stan. Kiedy na wejściu
zegarowym pojawia się opadające zbocze impulsu, wejścia przerzutnika głównego są
odłączone od wejścia D, jednocześnie wejścia przerzutnika pomocniczego są dołączone do
wyjść przerzutnika głównego. Wobec tego przerzutnik główny przekazuje swój stan
przerzutnikowi pomocniczemu. Na wyjściu nie zachodzą żadne inne zmiany, ponieważ
pierwszy przerzutnik został już "zatrzaśnięty". Przy następnym narastającym zboczu zegara
przerzutnik pomocniczy zostanie zablokowany i zachowa swój stan, podczas gdy przerzutnik
główny będzie ponownie reagował na stan wejścia. Przerzutnik wyzwalany zboczem
zachowuje się na zewnątrz tak samo, ale jego wewnętrzne działanie jest nieco inne. Analiza
pracy takiego przerzutnika nie jest trudna. Schemat przedstawiony na rysunku 3b pokazuje
uproszczoną strukturę wewnętrzną przerzutnika D wyzwalanego narastającym zboczem
impulsu zegara, którego dwa egzemplarze zamknięte w jednej obudowie tworzą popularny
układ scalony oznaczany symbolem '74. Wcześniej omówiony przerzutnik typu master-slave
przekazuje informację na wyjście zboczem opadającym. Istnieją przerzutniki wyzwalane
zarówno zboczem dodatnim, jak i ujemnym. Co więcej, większość przerzutników ma także
wejścia asynchroniczne typu SET (ustawiające) i CLEAR (zerujące). Zerowanie i ustawianie
może być wykonywane poziomem niskim lub wysokim, zależnie od typu przerzutnika. Kilka
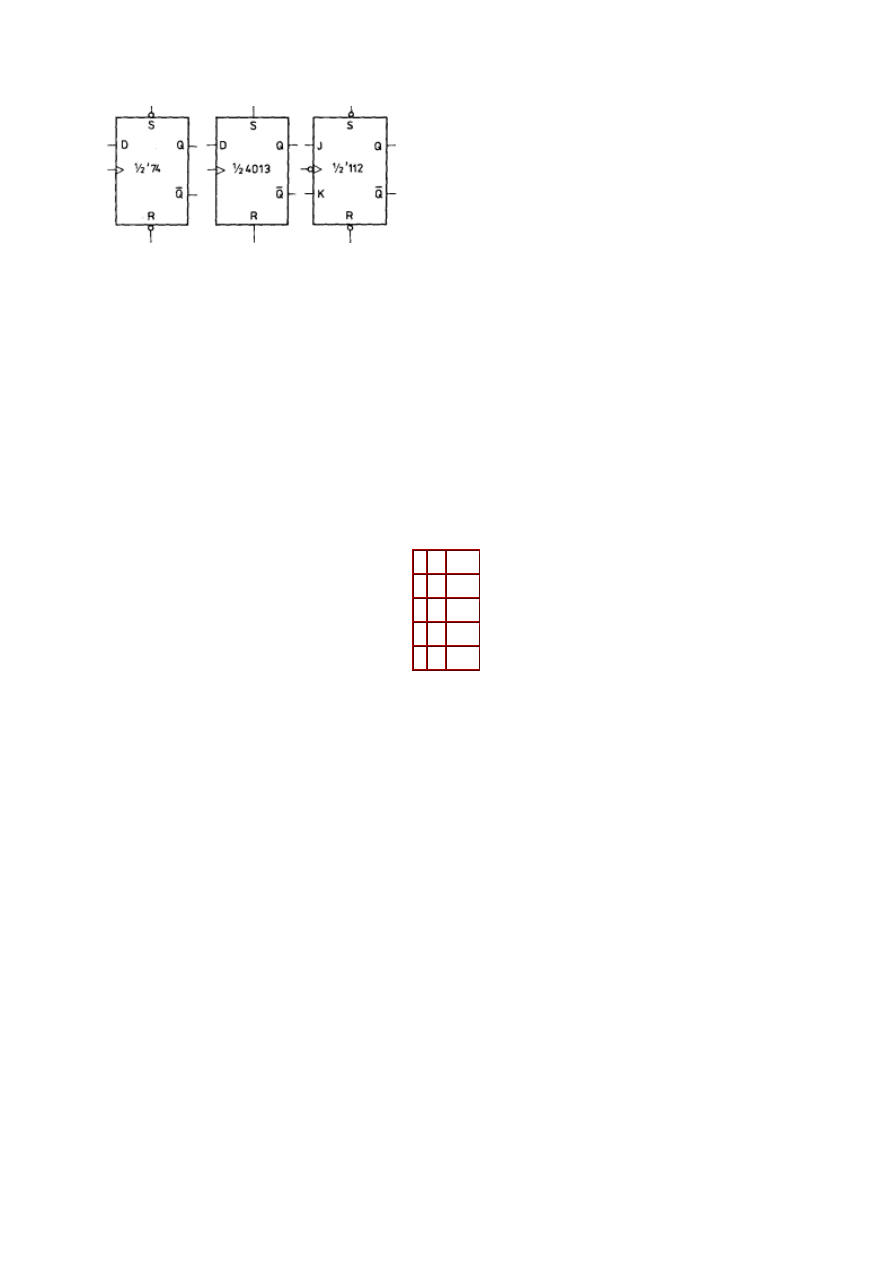
popularnych przerzutników pokazano na rysunku 4.
6
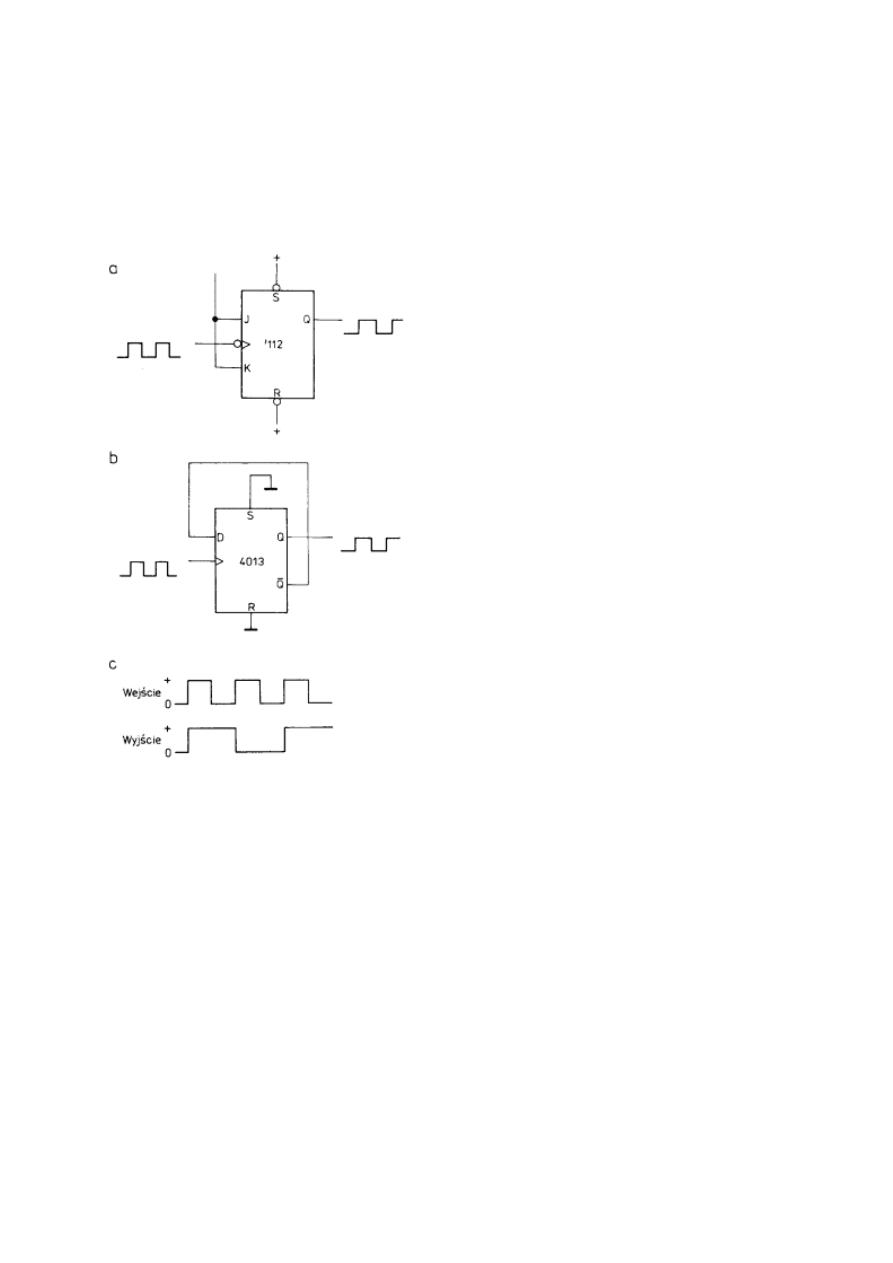
Rys. 4. - Przerzutnik D i JK
Mały klin oznacza "wyzwalany zboczem", małe kółeczko oznacza "negację" lub
uzupełnienie. Tak, więc układ '74 jest podwójnym przerzutnikiem typu D, wyzwalanym
zboczem narastającym, z wejściami asynchronicznymi SET i CLEAR aktywnymi poziomem
niskim. Układ 4013 (CMOS) jest podwójnym przerzutnikiem typu D, wyzwalanym zboczem
narastającym, z wejściami asynchronicznymi SET i CLEAR aktywnymi poziomem wysokim.
Układ '112 jest podwójnym przerzutnikiem typu JK, w którym przekazywanie danych na
wyjście odbywa się na zboczu opadającym i który ma wejścia asynchroniczne SET i CLEAR
aktywne poziomem niskim.
Przerzutnik JK. Zasada działania przerzutnika JK jest podobna do zasady działania
przerzutnika D z tą różnicą, że ma on dwa wejścia danych. Oto tablica prawdy:
J
K
Q
n+1
0
0
Q
n
0
1
0
1
0
1
1
1
Q'
n
Wynika z niej, że jeżeli stany na wejściach J i K są różne, to przy następnym aktywnym
zboczu zegara wyjście Q znajdzie się w stanie określonym, przez J. Jeżeli J i K są w stanie
niskim, to stan wyjścia się nie zmieni. Jeżeli J i K są w stanie wysokim, to stan wyjścia będzie
się zmieniał na przeciwny przy każdym kolejnym impulsie zegara
3. Przerzutniki JK
Przerzutnik jest to najprostszy układ sekwencyjny. Przerzutniki dzielimy na
synchroniczne tzn. takie, w których występuje, (co najmniej jeden) wyróżniony sygnał
zwany przebiegiem zegarowym, taktującym lub synchronizującym. Przebieg ten
wyznacza cykl pracy układu, a jego okres stanowi umowną jednostkę czasu. Sygnał
zegarowy określa chwile, w których stany wejść oddziałują na układ. Chwile te są
wyznaczane przez zbocze dodatnie bądź ujemne przebiegu taktującego, dlatego mówimy
o synchronizacji układu zboczem narastającym lub opadającym. W chwilach tych stan
innych wejść nie powinien się zmieniać. Odcinek czasu pomiędzy dwoma kolejnymi
zboczami aktywnymi sygnału zegarowego jest nazywany okresem.
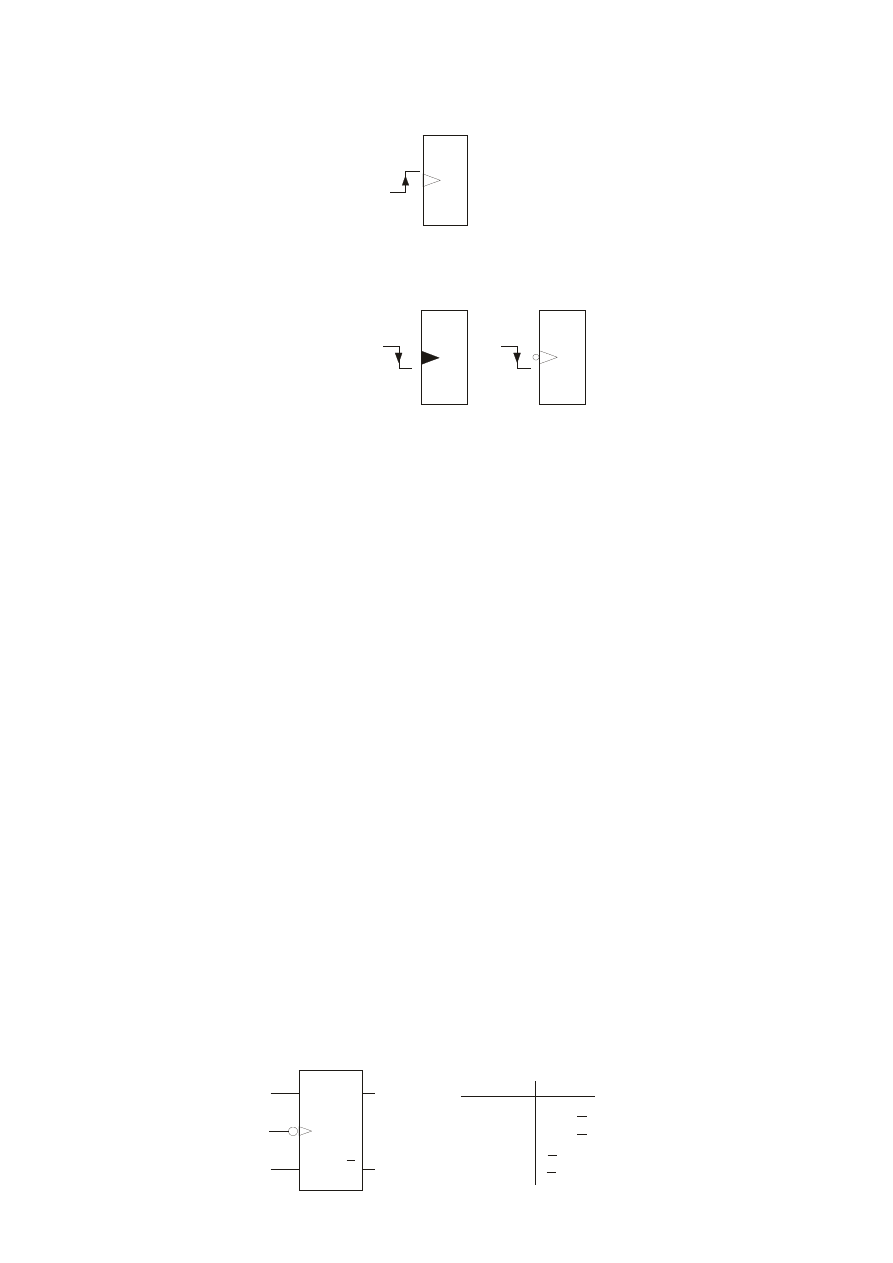
Dla oznaczania sposobu wyzwalania danego przerzutnika stosuje się symbole
przedstawione na poniższym rysunku:
7
a)
wyzwalanie zboczem dodatnim.
b)
wyzwalanie zboczem ujemnym.
Są także przerzutniki synchroniczne wyzwalane poziomem.
Drugą grupę stanowią przerzutniki asynchroniczne, w których każda zmiana stanu
wejść układu oddziałuje na układ, powodując jego reakcję.
Układy synchroniczne z racji oddziaływania wejść na wyjścia tylko w chwilach
określonych przez sygnał zegarowy są układami bardziej odpornymi na zakłócenia niż
układy asynchroniczne.
Badany przez nas przerzutnik JK jest właśnie układem synchronicznym z racji
posiadania wejścia taktującego. Reaguje więc on na informację tylko w obecności
impulsu zegarowego, przy czym stan wejść informacyjnych powinien być wówczas już
ustalony i nie zmieniać się.
Każdy przerzutnik używany w technice cyfrowej jest układem, o co najmniej dwóch
wejściach i z reguły dwóch wyjściach. Wejścia mogą być:
-
zegarowe (inaczej: synchronizujące, wyzwalające). Wejście to oznaczane jest literą C
lub oznaczeniami: CK, CL, CP, CLK. (przy czym występuje ono tylko w
przerzutnikach synchronicznych).
-
informacyjne.
-
programujące, przygotowujące.
Wejścia programujące są wejściami asynchronicznymi i nadrzędnymi w stosunku do
pozostałych wejść. Ich nadrzędność wraża się tym, że przy sterowaniu przerzutnika od strony
pozostałych wejść o stanie przerzutnika decydują wyłącznie wejścia programujące.
Działanie przerzutnika w naszym przypadku opisaliśmy za pomocą tzw. tablicy
wzbudzeń, która określa, jaki powinien być stan wejść informacyjnych, aby przerzutnik
przeszedł z jednego stanu do drugiego.
3.1. Przerzutnik synchroniczny typu JK.
Symbol graficzny oraz tablicę wzbudzeń przedstawia rysunek:
J
K
C
Q
Q
Q J K
0 0 0
0 1 1
1 0 1
1 1 0
Q
+
8
Przerzutnik ma dwa wejścia informacyjne oznaczone literami J i K oraz wejście
zegarowe C. Wejście J = 1 ustawia przerzutnik w stan 1, a wejście K = 1 ustawia
przerzutnik w stan 0. Dla stanu J = 0 i K = 0 przerzutnik ten pamięta stan poprzedni.
Podanie stanu J = 1 i K = 1 sprawia, przerzutnik zmienia swój stan na przeciwny w
stosunku do poprzedniego.
Wszystkie zmiany wyjść zachodzą w obecności aktywnego zbocza impulsu
zegarowego podanego na wejście C (dla oznaczenia na rys. jest to zbocze opadające).
Działanie dynamiczne przerzutnika wyzwalanego opadającym zboczem impulsu
zegarowego obrazuje przebieg zdjęty z wejść i wyjść układu.
C
J
K
Q
Q
3.2. Przerzutnik synchroniczny typu JK – MS.
Przerzutnik typu JK może być synchronizowany zboczem ujemnym, dodatnim
lub poziomem, a także może być przerzutnikiem dwutaktowym, co oznacza, że do
ustawienia stanu przerzutnika są wymagane dwa kolejne zbocza impulsu zegarowego
tzn. cały pojedynczy impuls prostokątny.
Przerzutnik taki nazywamy przerzutnikiem kategorii Master – Slave, w skrócie
MS (master – pol. Pan, slave - pol. sługa).
Przerzutnik dwutaktowy (MS) działa w ten sposób, że w czasie pierwszego zbocza
(narastającego) są próbkowane stany wejść J i K, drugie zbocze (opadające) powoduje
zgodną z tablicą przejść zmianę stanu przerzutnika. W rezultacie zmianę stanu
obserwujemy przy opadającym zboczu impulsu zegarowego i dlatego symbol
graficzny takiego przerzutnika mówi nam, że jest to przerzutnik reagujący na
opadające zbocze impulsu zegarowego. Ogólnie rzecz biorąc kolejność zboczy może
być odwrócona, czyli czytanie wejść może być przy zboczu ujemnym, a zmiana stanu
wyjść przy zboczu dodatnim.
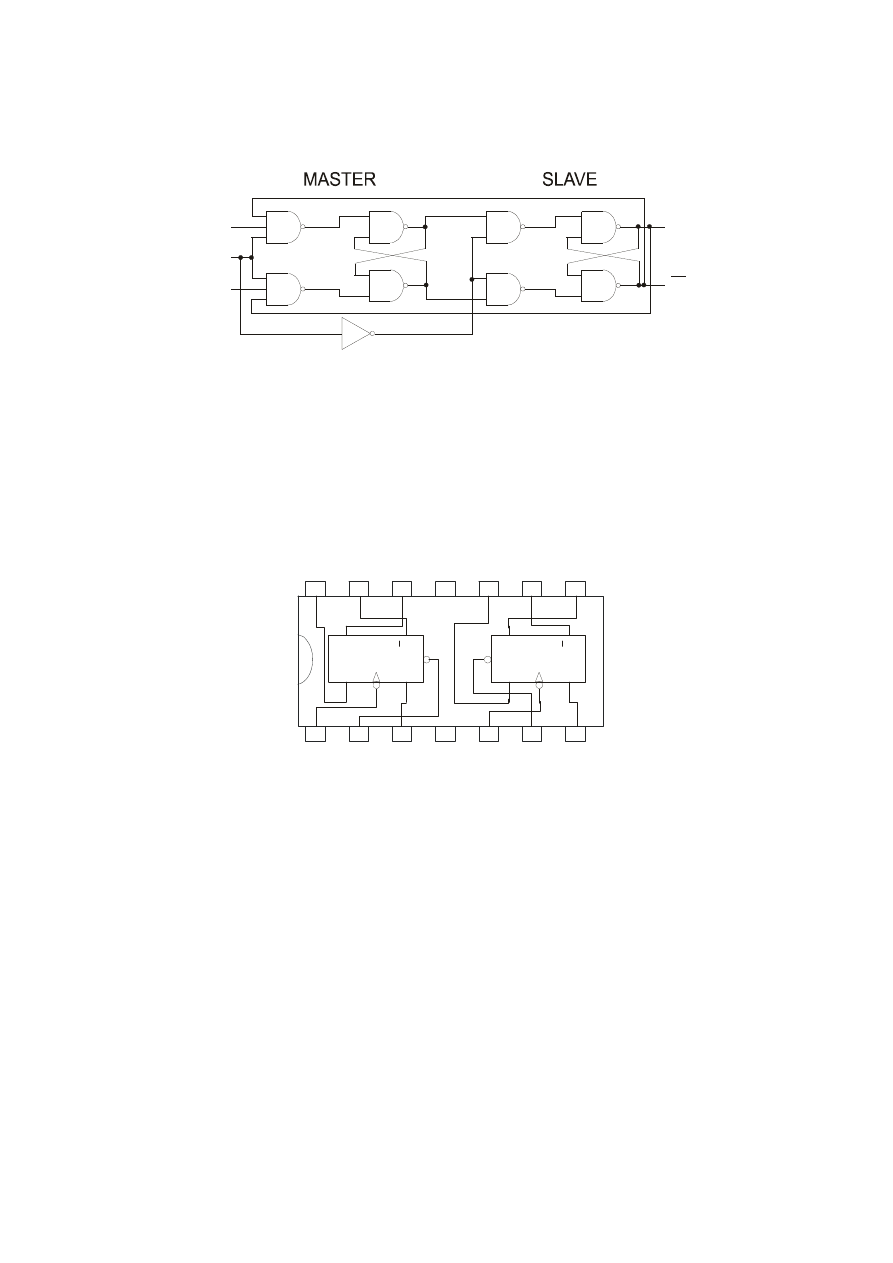
Jak przedstawia poniższy rysunek, przerzutnik dwutaktowy składa się z dwu
przerzutników połączonych kaskadowo. Pierwszy z nich nazywany jest Master (M),
drugi Slave (S).
J
K
C
Q
Q
J
K
C
Q
Q
9
Schemat logiczny takiego rozwiązania:
Dla zapewnienia poprawnej pracy przerzutnika sygnały na wejściach informacyjnych
powinny być ustalone przez cały czas trwania impulsu zegarowego. Zmiana stanu wejść JK
podczas aktywnego zbocza impulsu zegarowego może spowodować niezgodne z tablicą
przejść działanie przerzutnika.
Przykładem scalonego przerzutnika typu JK – MS może być układ 7473 zawierający
w swej strukturze dwa niezależne przerzutniki z wyprowadzonym wejściem zerującym
reagującym na stan niski (CLR).
W układach cyfrowych zawierających przerzutniki należy liczyć się z możliwością
przypadkowego ustalenia stanu układu po włączeniu zasilania. Wobec tego na ogół wymaga
się sprowadzenia układu do stanu początkowego przed rozpoczęciem pracy. Takie wstępne
przygotowanie układu osiąga się za pomocą wejść zerujących wprowadzających wyjście
przerzutnika w stan niski lub wejść ustawiających wprowadzających wyjście przerzutnika w
stan wysoki na wyjściu, przy czym niedozwolona jest jednoczesna aktywacja obu tych wejść.
J
K
C
Q
Q
1
14
7493
GND
Vcc
J
K
C
Q
Q
J
K
C
Q
Q
C
L
R
C
L
R
10
4. Dzielniki częstotliwości
4.1. Dzielniki częstotliwości przez 2
Wykorzystując właściwość przerzutnika, polegającą na zmianie stanu po każdym impulsie
zegara, można łatwo wykonać układ dzielenia częstotliwości przez 2. Dwa przykłady takiego
układu pokazano na rys. 5.
Rys. 5. - Przerzutniki w układach dzielników częstotliwości przez 2
Przerzutnik JK zmienia stan na przeciwny po każdym impulsie zegara, gdy jego oba
wejścia utrzymywane są w stanie wysokim. Tę samą funkcję spełnia również drugi układ,
ponieważ do wejścia D przerzutnika jest doprowadzany sygnał z jego własnego wyjścia
Q'. Wobec tego w momencie nadejścia impulsu zegara przerzutnik D widzi na wejściu
negację swojego własnego stanu. W każdym przypadku częstotliwość przebiegu
wyjściowego jest dwukrotnie mniejsza od częstotliwości przebiegu wejściowego.
4.2. Dzielniki częstotliwości przez 2
n
Łącząc kaskadowo kilka dzielników przez 2 (tzn. łącząc wyjście Q każdego przerzutnika z
wejściem zegarowym następnego przerzutnika) uzyskuje się układ dzielnika przez 2
n
,
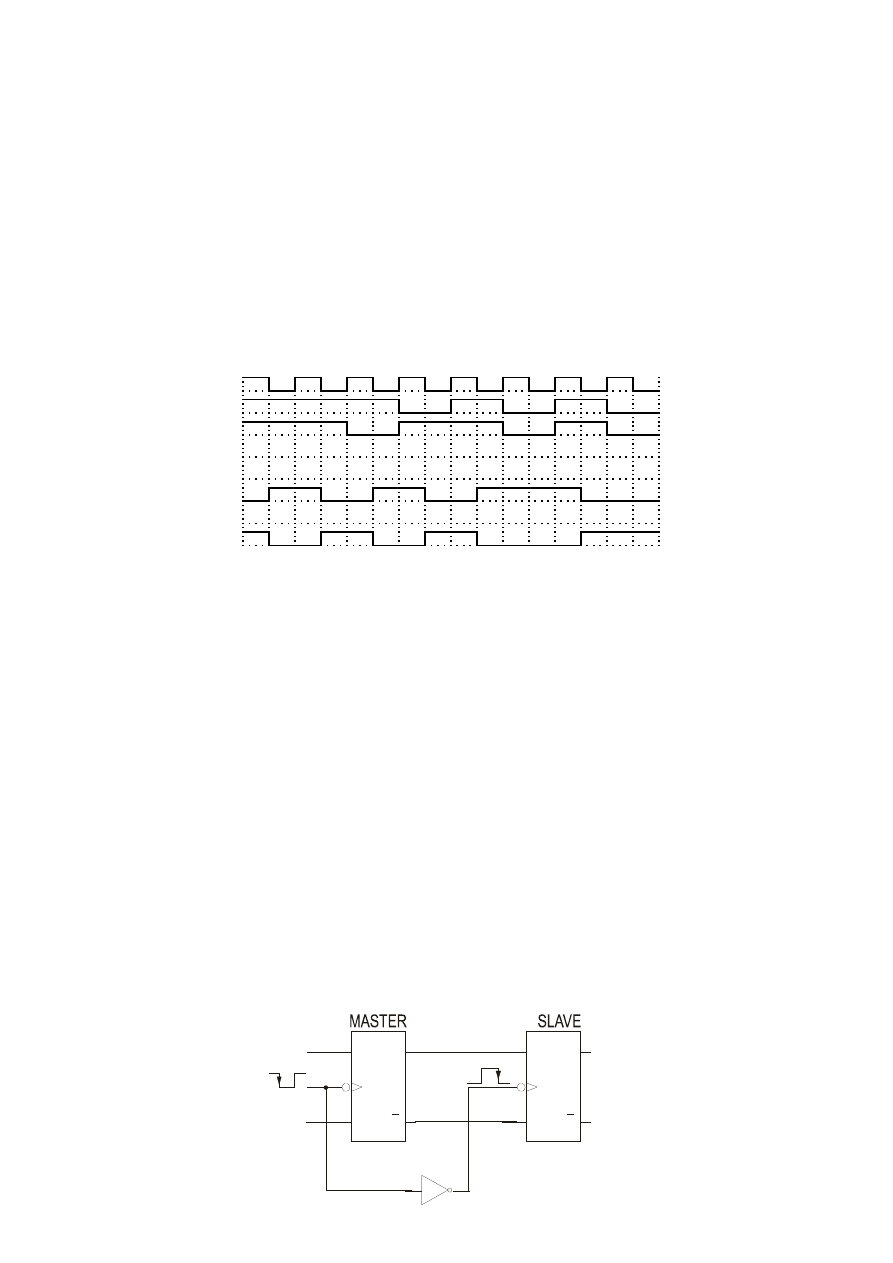
czyli licznika binarnego. Na rysunku 6 pokazaliśmy 4-stopniowy licznik asynchroniczny z
przeniesieniem szeregowym (ang. ripple counter) oraz jego przebiegi czasowe.
11
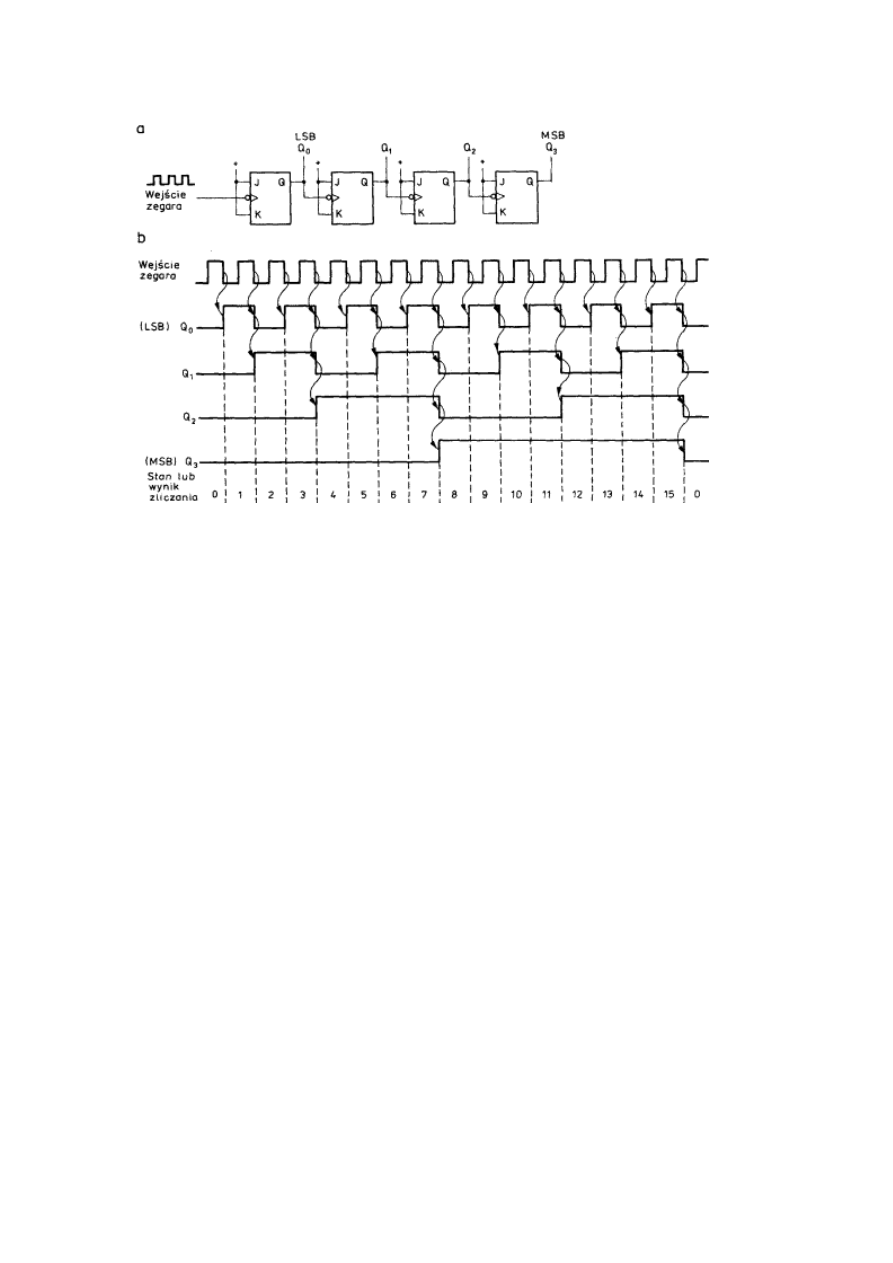
Rys. 6. - Licznik 4-bitowy: a) schemat, b) przebiegi czasowe
Jeżeli wejścia zegarowe są sterowane sygnałami z wyjść Q, trzeba użyć przerzutników
wyzwalanych zboczem opadającym (wskazują na to symbole negacji). Pokazany układ jest
licznikiem zliczającym do 16, albo inaczej - dzielnikiem częstotliwości sygnału zegarowego
przez 16. Sygnał wyjściowy ostatniego przerzutnika jest falą prostokątną o częstotliwości
równej 1/16 częstotliwości wejściowego sygnału taktującego. Układ taki nazywa się
licznikiem, ponieważ informacja obecna na czterech wyjściach Q, odczytywana jako 4-bitowa
liczba binarna, przyjmuje w kolejnych taktach zegara kolejne wartości binarne od 0 do 15,
ulegając za każdym razem zwiększeniu o jeden. Ilustrują ten fakt pokazane na rysunku 6
przebiegi czasowe. W ich opisie skrótami MSB i LSB oznaczono odpowiednio najbardziej i
najmniej znaczący bit licznika. Wygięte strzałki wskazują uzależnienia między sygnałami, co
ułatwia zrozumienie zasady działania układu. Licznik jest tak pożytecznym układem
funkcjonalnym, tak że doczekał się wykonania w postaci scalonej w wielu wersjach, w tym
jako licznik 4-bitowy, BCD i wielocyfrowy. Łącząc kaskadowo wiele takich liczników i
wyświetlając wynik zliczania na wyświetlaczu cyfrowym (np. wykorzystującym diody
ś
wiecące) można stosunkowo łatwo zbudować licznik zdarzeń.
Jeżeli ciąg impulsów będzie doprowadzany do wejścia takiego licznika dokładnie przez 1
sekundę, uzyskamy częstościomierz, który wyświetla częstotliwość (liczbę okresów na
sekundę), zliczając naprawdę liczbę okresów w ciągu jednej sekundy. W rzeczywistości
istnieją już scalone jednoukładowe częstościomierze, zawierające generator wzorcowy,
licznik, układy sterowania i wyświetlania.. W praktyce prosta metoda kaskadowego łączenia
liczników, polegająca na łączeniu wyjść Q każdego przerzutnika z wejściem zegarowym
następnego przerzutnika, prowadzi do pojawienia się kilku interesujących problemów
związanych z kumulującymi się opóźnieniami, które powstają w czasie "przenoszenia się"
sygnału przez łańcuch przerzutników. Liczniki "synchroniczne”, (w których wszystkie
wejścia zegarowe widzą ten sam sygnał taktujący) są zwykle lepsze. Wobec tego zajmijmy
się teraz systemami taktowanymi synchronicznie.
12
Układy badane.
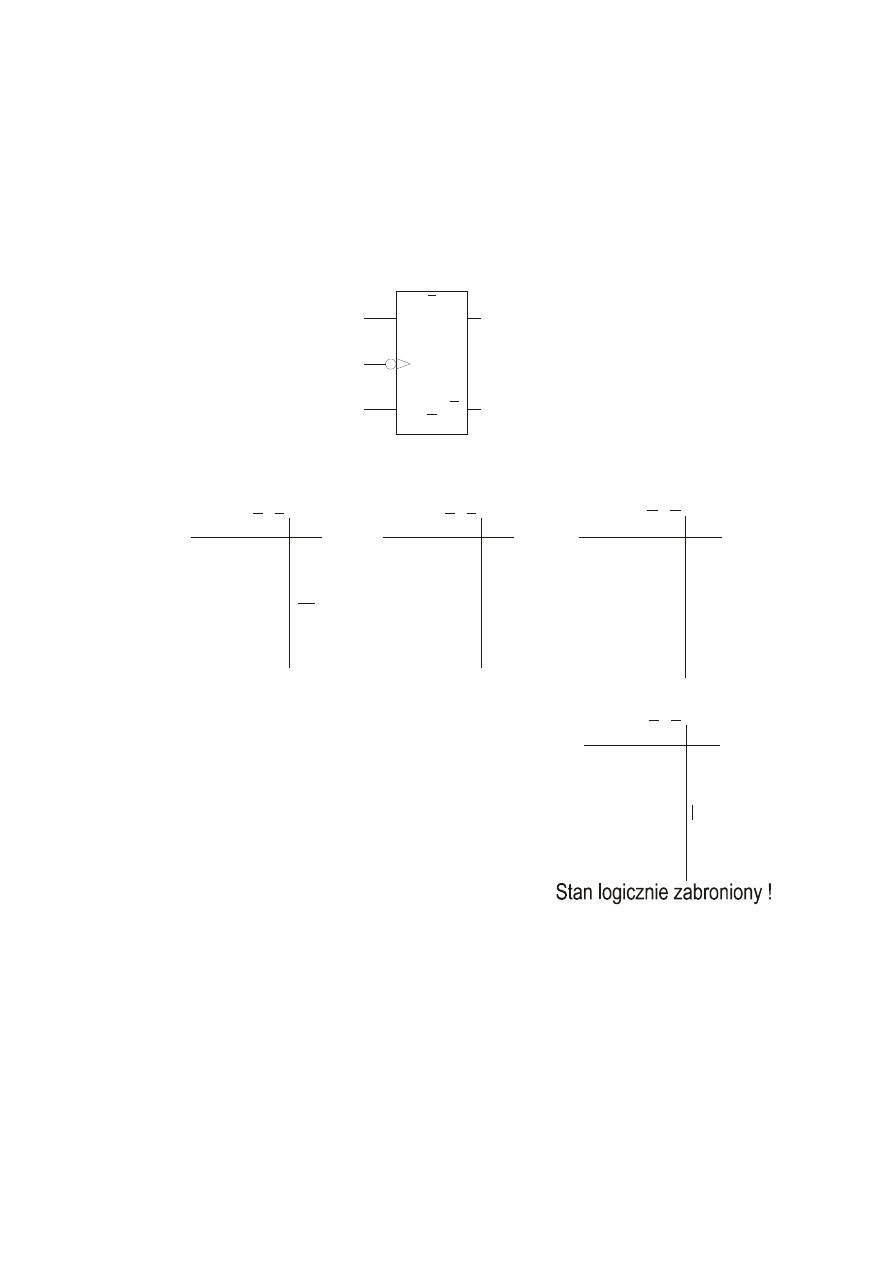
Przerzutnik typu JK – MS z wejściem zerującym i ustawiającym.
Symbol przerzutnika i tablica przejść.
Ustaliliśmy, że przerzutnik reaguje na opadające zbocze impulsu zegarowego, na co
wskazuje symbol.
0 0 1 1 Q
0 1 1 1 0
1 0 1 1 1
1 1 1 1 Q
Q
+
J K R S
0 0 0 1 0
0 1 0 1 0
1 0 0 1 0
1 1 0 1 0
Q
+
J K R S
0 0 1 0 1
0 1 1 0 1
1 0 1 0 1
1 1 1 0 1
Q
+
J K R S
J
K
C
Q
Q
R
S
0 0 0 0
0 1 0 0
1 0 0 0
1 1 0 0
Q
+
J K R S
Q
=
Q
Wyszukiwarka
Podobne podstrony:
ip lpec bramki AND,OR,NAND,NOR,NOT
Adresy IP
w8 VLAN oraz IP w sieciach LAN
ADRESACJA W SIECIACJ IP
PA2 8 przerzutniki synchron
SNMP (IP)
PA2 5 przerzutniki asynchr
Adresy IP
ip 11 04
Microsoft PowerPoint IP tryb zgodnosci
M Newton Przerznaczenie dusz
CGEIB IP
ZAPROSZENIE, Documents, IP Zielona gora, mat inf
Podsumowanie pracy Zespołu Informacji Publicznej i Współpracy z innymi za rok 2015, Documents, ip, s
Nauka przerzutu bokiem, Gimnastyka1
więcej podobnych podstron