Laboratorium z Podstaw Konstrukcji Maszyn - 1 -
Ćw. 5. Określenie współczynnika strat mocy i sprawności przekładni ślima-
kowej.
1. Podstawowe wiadomości i pojęcia.
Przekładnie ślimakowe są to przekładnie wichrowate, w których kąt skrzyżowanie osi
wynosi 90
0
. Przekładnie te składają się ze ślimaka i ślimacznicy, przy czym kołem czynnym
jest najczęściej ślimak. Różnią się od przekładni śrubowych tym, że ślimaki mają małą liczbę
zwojów (zębów), a ślimacznice – wklęsłe wieńce zębate. Rozróżnia się przekładnie ślimako-
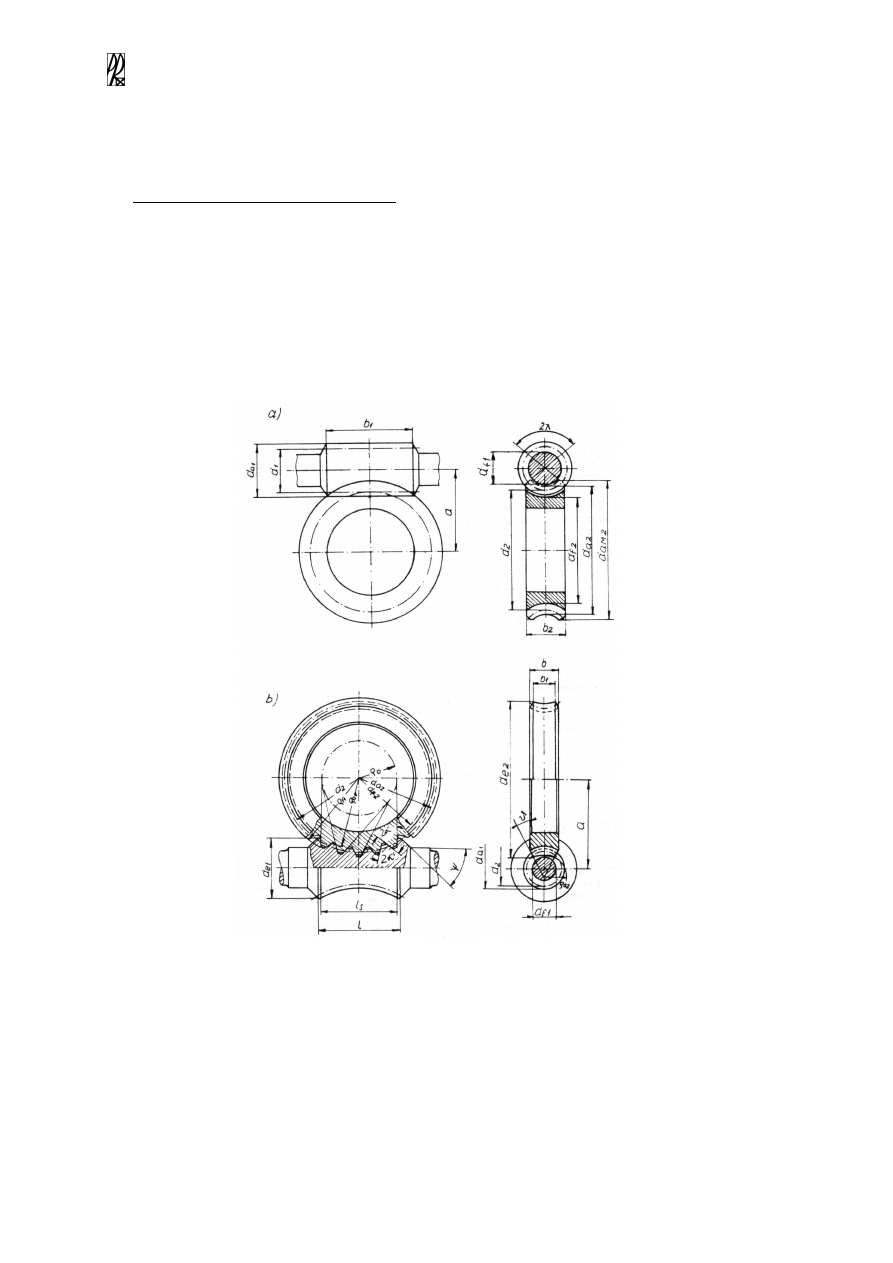
we walcowe i globoidalne (rys. 6.1). W przekładni ślimakowej walcowej zęby ślimaka są na-
cięte na walcu, natomiast w przekładni globoidalnej – na wklęsłej powierzchni obrotowej,
której promień podziałowy odpowiada promieniowi podziałowemu współpracującej ślimacz-
nicy.
Rys. 6.1. Rodzaje przekładni ślimakowych a) walcowa, b) globoidalna
Przekładnie ślimakowe są częściej stosowane niż przekładnie o zwichrzonych osiach.
Powierzchnia styku zębów jest liniowa, a nie punktowa jak w innych przekładniach śrubo-
wych wichrowatych, przez co żywotność przekładni ślimakowej jest większa. Inną korzystną
zaletą tej przekładni jest możliwość uzyskania samohamowności, co jest nieraz bardzo pożą-
dane w niektórych konstrukcjach, gdyż upraszcza ich budowę (eliminuje konieczność stoso-
wania hamulca). Przekładnia ślimakowa może byś wykonana jako samohamowna przy kącie
wzniosu linii zwoju
0
5
.
2
≤
γ
. Jeśli przekładnia nie jest samohamowna, to kołem czynnym
może być ślimacznica. Takie rozwiązanie bywa wykorzystywane w mostach napędowych
samochodów ciężarowych. Kolejnymi zaletami w porównaniu z przekładnią śrubową są: jed-

Laboratorium z Podstaw Konstrukcji Maszyn - 2 -
noczesna współpraca większej ilości zębów, przenoszenie dużych obciążeń, cichobieżność
(co wynika m.in. z płynnego zazębiania się zębów ślimaka i ślimacznicy).
Wady przekładni ślimakowej to stosunkowo mała sprawność, trudność uzyskania dużej
dokładności wykonania, konieczność bardzo dokładnego montażu w celu uzyskania prawi-
dłowego zazębienia.
Współczynnik sprawności przekładni ślimakowej można określić wyrażeniem:
ϕ
η
−
=
1
gdzie:
N
N
str
=
ϕ
N
str
– moc tracona na pokonanie oporów szkodliwych
N – moc doprowadzona do ślimaka
Straty mocy uwarunkowane są głównie powstającymi w czasie pracy siłami tarcia mię-
dzy zetkniętymi powierzchniami ślimacznicy i ślimaka, tak jak w czasie zazębienia ostatnich
ma miejsce ślizganie się zwojów ślimaka wzdłuż pracujących powierzchni zębów, analogicz-
nie jak w przekładniach śruba – nakrętka. Oprócz tego przy cylindrycznym ślimaku w głów-
nej płaszczyźnie przebiega toczenie się ze ślizganiem zębów ślimacznicy w stosunku do zwo-
jów ślimaka, analogicznie jak w przekładni koło zębate – zębatka. Wielkość sił tarcia określa
się z nacisków normalnych poprzez współczynnik tarcia.
Współczynnik tarcia w przekładniach ślimakowych zależy od materiału ślimaka i śli-
macznicy, stanu stykających się powierzchni, lepkości smaru, szybkości ślizgania
v
ś
l
, kształtu
zębów ślimacznicy i zwojów ślimaka, wielkości obciążenia i wielu innych czynników.
Moc, która jest tracona na pokonanie szkodliwych oporów wywołanych ślizganiem się
zwojów ślimaka wzdłuż zębów ślimacznicy może być w sposób przybliżony określona tak,
jak w przekładni śruba – nakrętka.
Przy napędzającym ślimaku z dostateczną dla praktyki dokładnością można przyjąć:
+
−
=
)
'
tg(
tg
1
0
0
ρ
γ
γ
N
N
str
i współczynnik strat:
)
'
tg(
tg
1
0
0
ρ
γ
γ
ϕ
+
−
=
str
W powyższych wyrażeniach:
γ
0
– kąt wzniosu średniej linii śrubowej ślimaka
ρ΄
- kąt tarcia między zetkniętymi powierzchniami
Współczynnik uwzględniający straty analogiczne stratom w zazębieniu koła o zębach
skośnych z zębatką można przyjąć:
2
0
cos
z
z
s
z
γ
µ
πε
ϕ
=
, gdzie:
ε
s
– skokowa liczba przyporu,
µ
– współczynnik tarcia między stykającymi się zębami,
z
2
– liczba zębów ślimacznicy
Współczynnik strat w łożyskach tocznych przekładni przyjmuje się:
Laboratorium z Podstaw Konstrukcji Maszyn - 3 -
05
,
0
03
,
0
−
=
=
N
N
l
l
ϕ
, gdzie:
N
ł
– moc tracona na pokonanie oporów szkodliwych w łożyskach
Współczynnik strat, uwzględniający straty mocy na mieszanie smaru (oleju) N
ol
może
być w sposób przybliżony określony z wyrażenia:
N
E
L
v
N
N
t
ol
ol
0
1
001
,
0
=
=
ϕ
, gdzie:
v
1
– obwodowa szybkość ślimaka w m/s,
L – długość naciętej części ślimaka,
E
t
0
– lepkość oleju w stopniach Euglera przy temperaturze t
0
C oleju w reduktorze.
Przy zanurzeniu ślimacznicy w oleju do powyższego wyrażenia należy podstawić w
miejsce v
1
obwodową prędkość ślimacznicy v
2
i w miejsce L szerokość ślimacznicy B.
Według wyżej przedstawionych równań określa się przybliżoną wielkość strat w prze-
kładni ślimakowej. Dokładność określenia ich wielkości można zwiększyć tylko na podstawie
doświadczeń i badań.
Całkowity współczynnik strat w przekładni ślimakowej:
ol
l
z
str
ϕ
ϕ
ϕ
ϕ
ϕ
+
+
+
=
a sprawność wyniesie:
)
(
1
ol
l
z
str
ϕ
ϕ
ϕ
ϕ
η
+
+
+
−
=
Przy badaniu przekładni rozdzielenie strat nastręcza duże trudności, ponieważ wszystkie
straty w zazębieniu i łożyskach są stosunkowo małe w porównaniu ze stratami w parze śru-
bowej. Stąd też przyjmuje się w miejsce kąta tarcia zredukowany kąt tarcia. Wówczas współ-
czynnik sprawności przekładni przy napędzającym ślimaku wyniesie:
)
1
(
)
'
tg(
tg
0
0
0
ol
ϕ
ρ
γ
γ
η
−
+
=
Doświadczalnie wielkości ρ΄ w zależności od prędkości ślizgania v
ś
l
przy różnych mate-
riałach ślimaka i ślimacznicy podano w tabeli 1.
2
1
2
2
1
19100
z
z
mn
v
ś
l
+
=
[m/s], gdzie:
m – moduł przekładni w mm,
n
1
– liczba obrotów ślimaka w obr/min,
z
1
– krotność ślimaka.
Laboratorium z Podstaw Konstrukcji Maszyn - 4 -
Tabela 1
V
ś
l
[m/s]
µ΄
ρ΄
= arc tg µ΄
V
ś
l
[m/s]
µ΄
ρ΄
= arc tg µ΄
0,01
0,1
0,25
0,5
1,0
1,5
2,0
0,11 – 0,12
0,08 – 0,09
0,065 – 0,075
0,055 – 0,065
0,045 – 0,055
0,04 – 0,05
0,035 – 0,045
6
0
17’ – 6
0
51’
4
0
34’ – 5
0
09’
3
0
34’ – 4
0
17’
3
0
09’ – 3
0
43’
2
0
35’ – 3
0
09’
2
0
17’ – 2
0
52’
2
0
00’ – 2
0
35’
2,5
3,0
4,0
7,0
10,0
15,0
0,03 – 0,04
0,028 – 0,035
0,023 – 0,03
0,018 – 0,026
0,016 – 0,024
0,0184– 0,022
1
0
43’ – 2
0
17’
1
0
36’ – 2
0
00’
1
0
19’ – 1
0
43’
1
0
02’ – 1
0
29’
0
0
55’ – 1
0
22’
0
0
48’ – 1
0
09’
2. Schemat i opis stanowiska laboratoryjnego
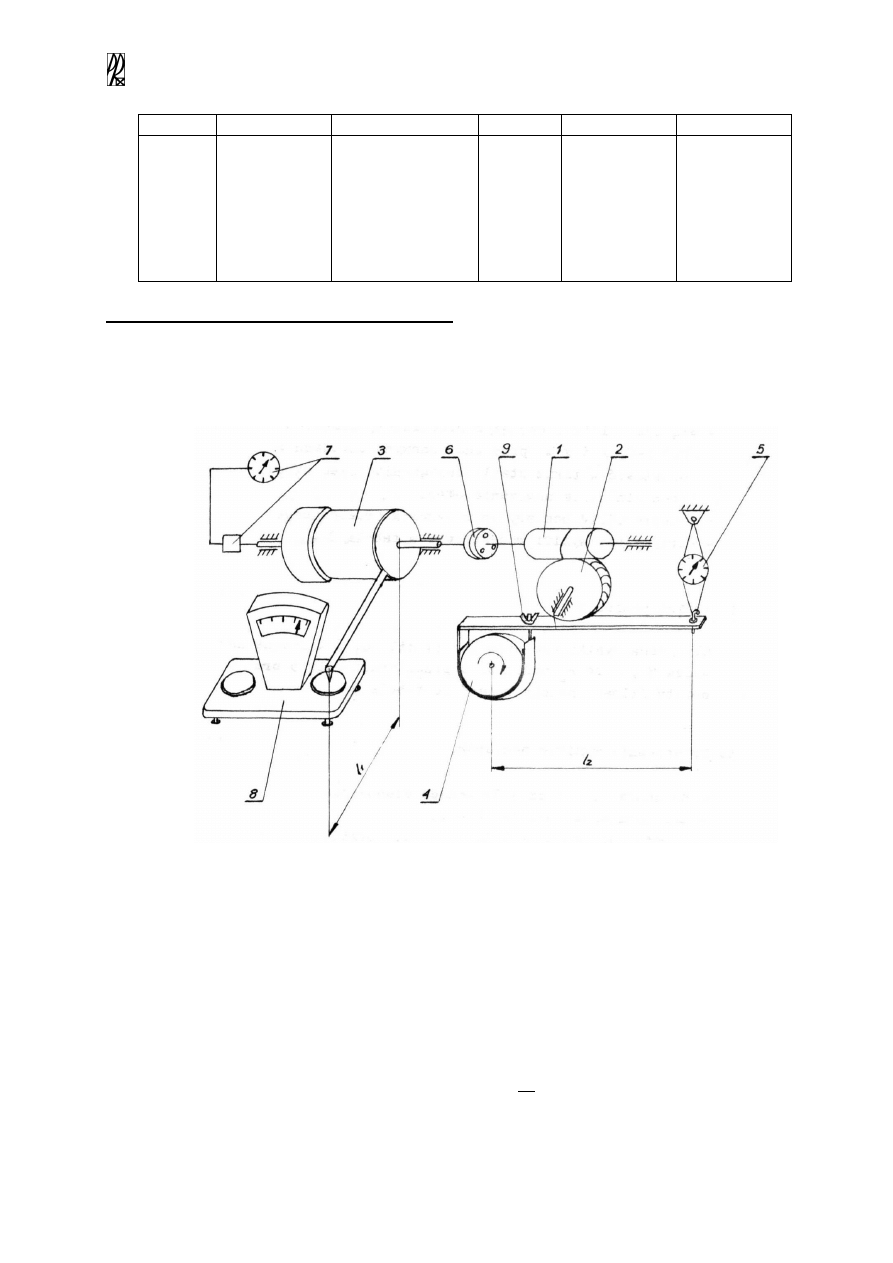
Przedstawione na rys. 6.2 stanowisko laboratoryjne składa się z: reduktora ślimakowego
składającego się ze ślimaka 1 i ślimacznicy 2, silnika 3, hamulca 4 oraz dynamometru 5. Sil-
nik przekazuje obroty przez sprzęgło 6 na wał ślimaka. Obroty silnika wskazuje tachometr 7.
Rys. 6.2 Stanowisko pomiarowe
Moment obrotowy, jaki przekazuje silnik 3 na wal ślimaka 1 określany jest przy pomocy
dźwigni (ramieniem l
1
) i wagi 8. Moment działający na wal ślimacznicy określany jest za
pomocą dzwigni hamulca o ramieniu l
2
i dynamometru 5, wielkość tego momentu można
zmieniać poprzez pokręcenie nakrętką 9.
Kolejność czynności przy wykonywaniu ćwiczenia:
-
podłączyć silnik do sieci,
-
określić moment znamionowy silnika
n
N
M
9550
=
[N/m], gdzie:
N – moc znamionowa silnika [kW],
N – obroty znamionowe.
Laboratorium z Podstaw Konstrukcji Maszyn - 5 -
-
włączyć silnik i obciążyć przekładnię momentem (0,2 – 0,3)i×M przy znamionowych
obrotach i pozostawić w takim stanie obciążenia przez okres 5-6 min w celu nagrza-
nia oleju,
-
przeprowadzić pomiary wg wskazówek prowadzącego,
-
otrzymane wyniki rejestrować w tabeli pomiarów.
Wyniki pomiarów
Otrzymane wyniki pomiarów jak: siła G
1
wskazywana na wadze 8, siła P
2
wskazywana
przez dynamometr 5 oraz obroty ślimaka należy wpisać do tabeli pomiarów.
Opracowanie wyników pomiarów
Dane charakterystyczne dotyczące stanowiska:
-
moc znamionowa silnika N = ..........[kW]
-
obroty znamionowe silnika n = ..........[obr/min]
-
ilość zębów ślimacznicy z
2
= ..........
-
zwojność (krotność) ślimaka z
1
= ..........
-
moduł przekładni m = ..........
-
gatunek oleju w przekładni ślimakowej ..........................
-
lepkość oleju w temperaturze pracy t = 30
0
C w stopniach Euglera
0
30
E
= ..........
-
długość naciętej części L = ..........
-
szerokość koła ślimakowego (ślimacznicy) B = ..........
-
kąt wzniosu linii śrubowej ślimaka γ
0
= ..........
Prędkość obwodową ślimaka obliczamy z zależności:
1000
60
1
1
1
×
=
n
d
v
, gdzie:
0
1
1
tg
γ
m
z
d
=
,
n
1
– obroty ślimaka [obr/min]
W oparciu o zależności na v
ś
l
i γ oraz tabelę 1 obliczyć należy sprawność oraz współ-
czynnik strat przekładni, a następnie wpisać do tabeli pomiarów.
Moment obrotowy na wałku ślimaka wynosi:
1
1
1
l
G
M
=
[Nm],
a na wałku ślimacznicy
2
2
2
l
P
M
=
[Nm], stąd sprawność przekładni wynosi:
1
2
iM
M
=
η
a współczynnik strat:
η
ϕ
−
=
1
Moc dostarczona do przekładni wyniesie:
9550
1
n
M
N
=
[kW]
a moc tracona
N
N
str
ϕ
=
[kW]
Przełożenie przekładni
2
1
z
z
i
=
Laboratorium z Podstaw Konstrukcji Maszyn - 6 -
Tabela pomiarów
Pomiar
1
2
3
4
5
Obroty silnika n [obr/min]
Wielkość siły G
1
[N]
Siła P
2
[N]
Moment obrotowy na ślimaku
M
1
[Nm]
Moment obrotowy na ślimacznicy
M
2
[Nm]
Sprawność η = M
2
/iM
1
Sprawność obliczona η
0
Współczynnik strat φ = 1- η
Współczynnik strat obliczony
φ
0
= 1- η
0
Moc dostarczona do przekładni N
[kW]
Moc tracona N
str
= φ N [kW]
Moc tracona wg współczynnika
obliczonego N
str
= φ
0
N [kW]
Wnioski
-
uzasadnić rozbieżności wyników z przeprowadzonych obliczeń i pomiarów,
-
podać i przeanalizować wpływ niektórych czynników na straty mocy w przekładni i
jej sprawność,
-
inne.
Wytyczne do sprawozdania
W sprawozdaniu należy ująć:
-
krótki opis ćwiczenia i schemat stanowiska laboratoryjnego,
-
podać skróconą analizę teoretyczną tematu ćwiczenia,
-
podać wyniki pomiarów i obliczeń w tabeli pomiarów oraz niezbędne zależności do
obliczeń,
-
wnioski dotyczące ćwiczenia.
Literatura:
1. Markowski T., Mijał M., Rejman E. „Podstawy konstrukcji maszyn – napędy mechanicz-
ne, cz. 2”, Oficyna Wydawnicza Politechniki Rzeszowskiej, Rzeszów 1996.
Wyszukiwarka
Podobne podstrony:
PO lab 5 id 364195 Nieznany
lab [1] id 258099 Nieznany
chemia fizyczna lab id 112228 Nieznany
Lab 4 id 257946 Nieznany
Lab 1 id 257555 Nieznany
fcs lab 5 id 169065 Nieznany
Bsi 08 lab id 93519 Nieznany
lab(2) id 258733 Nieznany
lab 3 2 id 259509 Nieznany
lab [3] id 258100 Nieznany
LAB 9 id 258268 Nieznany
Arduino Lab 1 id 68202 Nieznany
Pr 1st 1 1 m01 lab id 382178 Nieznany
ModSym lab id 305590 Nieznany
Lab 8 id 258226 Nieznany
Lab 3 3 id 259511 Nieznany
IO lab 2 id 219711 Nieznany
P 2013 lab P id 797792 Nieznany
więcej podobnych podstron