
Sterowniki PLC/PAC
Uwagi wstęne
-Sterowniki PLC/PAC są jednymi z najczęściej stosowanych w przemyśle cyfrwych urządzeń sterujących
-Skróty nazw oznaczają Programmable Logic Controller i Programmable Automation Controller
-Pod względem konstrukcyjnym obie wersje nie różnią się między sobą nazwa PAC jest raczej chwytem marketingowym i oznacza PLC o większych możliwościach
obliczeniowych i platformą programową o większej otwartości.
-Sterowniki PLC pierwotnie były dedykowane wyłącznie do realizacji sterowania logicznego , obecnie (zwłaszcza wersje PAC) są w stanie realizować większość zadań sterowania
za wyjątkiem sterowania numerycznego i robotyki.
-Kostrukcja i zasady programowania sterowników PLC są znormalizowane.
Generalne założenia dotyczące systemów PLC:
-Łatwe programowanie i rekonfiguracja(sprzętowa i programowa) w zależności od potrzeb.
-Konstrukcja modułowa i łatwość napraw i utrzymania w ruchu poprzez wymianę modułów
-Wyższa niezawodność mniejsze wymiary i pobór energii niż systemy przekaźnikowe
-Cena porównywalna ze sprzętem przekaźnikowym
Uwagi
-Konfiguracja jest budowana z modułów ściśle pod kątem wymagań określonej aplikacji
-W ramach jednej "rodziny" sterowników jest dostępna duża liczba różnych modułów o różnych możliwościach i cenie
-Lokalizacja modułów na szynie jest ściśle okreslona i determinuje np. Ich adresy
-W praktyce często stosowana jest konfiguracja rozproszona, gdy moduły sygnałowe są połaczone z CPU za pośrednictwem sieci.
Podstawowe typy modułów sterownika PLC:
-Zasilacze
-jednostki centralne (CPU)
-moduły komunikacyjne np ETHERNET
-moduły sygnałów procesowych:(wejścia binarne, analogowe, wyjścia binarne, analogowe)
-Specjalizowane moduły "inteligentne" z własnymi procesami i układami wejść i wyjśc np.:pozyjonowanie osi ,regulacja temperatury
Dodatkowe elementów PLC:
Panele operatorskie – są to autonomiczne elementy o różnej funkcjonalności od prostej aż do bardzo rozbudowanej. Te bardziej rozbudowane pracują np pod windowsami ce i
mogą być platformą sprzętową dla aplikacji SCADA i stopnia nadrzędnego.
Sieć przemysłowa:
-Do połączenia rozproszonej konfiguracji pojedynczego PLC
-do połączenia sterownika PLC z innymi elementami systemu(np komputer)
-sieć przemysłowa może siędość znacznie różnic od ETHERNETU
Kompaktowy sterownik "hard PLC". Cechy:
-W jednej obudowie jest CPU zasilacz i zespół wejści wyjśc
-rozwiązanie dedykowane do prostszych aplikacji i tańsze niż sterownik modułowy
-większość sterowników kompaktowych ma możliwość rozbudowy o dodatkowe wejścia i wyjścia.
System sterowania "soft PLC"
Idea:Interfejs procesowy oraz metody programowania są te same co dla systemu hard plc.; Jednostka centralna jest zrealizowana wirtualnie pod nadzorem systemu WINDOWS
Zalety:Znacznie większa moc obliczeniowa w stosunku do systemu hard PLC; intergracja na jednej platformie sprzętowo-programowej systemu SCADA i CPU sterownika(i ew.
Środowiska konfiguracyjnego)
Wady:Praca pod nadzorem systemu WINDOWS (zawodność działania)
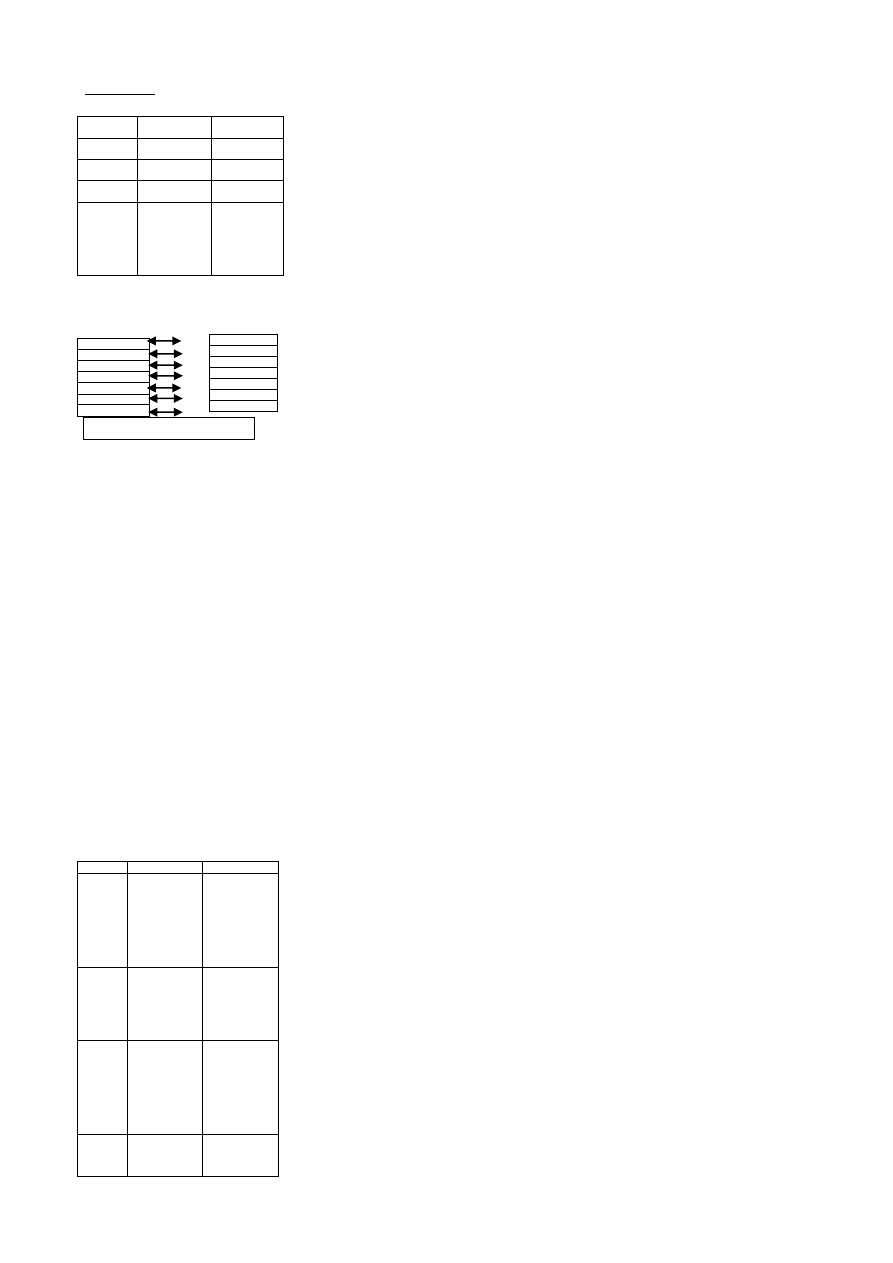
Cykl programowy PLC i regulatora cyfrowego:
od „odczyt wejść” do „uaktualnienie wejść”: czas odpowiedzi T
0
od początku do końca: czas cyklu Ts
Czas cyklu ( ang. Cycle Time, Scan Time) Ts Jest to czas trwania 1 cyklu programowego, od inicjalizacji do diagnostyki.
Czas odpowiedzi ( ang. Response Time) To Jest to czas od odczytu wejścia do zapisu skojarzonego z tym wejściem wyjścia.
Podczas pracy sterownika wartości T
s oraz To nie są stałe, lecz zmieniają się w pewnym zakresie i można jedynie oszacować ich minimalne i maksymalne wartości:
Dokładność zależy od oszacowań producenta
W przypadku regulatorów PID i innych prostych urządzeń nie mamy wpływu na wartość T
s oraz To, natomiast mamy wpływ na te parametry i mogą one być szacowane oraz
mierzone w przypadku systemów PLC.
Przykład szacowania wartości T
o dla sterownika PLC (SIEMENS):
T
omin
=T
R
+Tos+Tu+Tw+T
Di
+T
Do+
T
T
T
omax
=2T
R
+2Tos+2Tu+2Tw+T
Di
+T
Do+
T
T
+2T
DP
TR – czas odczytu wejść,Tos -czas wykonania systemu operacyjnego,Tu – czas wykonania programu użytkownika,TW – czas zapisu wyjść,TDi –czas opóźnienia wejść,TDo –czas
opóźnienia wyjść,
Oszacowanie czasu obsługi wejść i wyjść:
T
R
+T
W
=K+A*LB
0
+B*LB
1%3
+D*LB
DP
LB – liczba bajtów czytanych lub zapisywanych:
0 – na szynie 0,
1-3 – na szynach 1 – 3,
DP- w układach rozproszonych wejść /wyjść
K, A, B, D - stałe, równe w przypadku CPU 315 SIEMENS SIMATIC S7 300: K = 109 [us] , A= 10.6 [us] , B = 12.6 [us] , D = 10 [us] .
Oszacowanie czasu wykonania programu użytkownika:
F = 1.15 ( dla CPU 315 )
Tinstr – czasy wykonania wszystkich instrukcji programu
Czas wykonania pojedynczej instrukcji programu jest zdeterminowany przez: Typ CPU;Typ instrukcji;typ danych na jakich ta insrukcja jest wykonana
Czasy wykonania timerów:
T
T
=8n; n = ilość timerów użytych w programie
WNIOSKI ( tylko system „Hard-PLC”):
-Operacje wykonywane na danych typu DINT są znacznie szybsze, niż na danych typu REAL, przy tej samej precyzji.
-W przypadku wysokich wymagań dot czasu cyklu należy pamiętać o wyłączaniu nie używanych wejść i wyjść,
-Sterownik „hard PLC” nie nadaje się do realizacji zadań sterowania numerycznego i robotyki, gdyż te zadania wymagają wykonywania dużej ilości szybkich obliczeń z użyciem
funkcji trygonometrycznych.
-Oszacowania podawane przez producenta sprzętu są zwykle bardzo „ostrożne” i opisują najgorsze możliwe przypadki.
Zasady programowania sterowników PLC
Ogólne zasady programowania opisane w normie:
-Model i elementy oprogramowania
-typy danych
-typy zmiennych
-języki i metody programowania
Zasady nieomówione (zleżne od systemu sprzętu)
-zasady adresacji
-"nieformalne" elementy oprogramowania
-metody implementacji niektórych elementów
Konfiguracja – element na najwyższym poziomie jest to całość oprogramowania sterownika determinująca jego pracę. Obejmuje zarówno OS jak i program użytkownia
Zasób – Element opisujący platformę sprzętową do realizacji programu. Program aby był wykonywalny musi być załadowany do zasobu np symulator PLC jest symulatorem
zasobu.
Program – Jest to logiczne połączenie wszystkich elementów konstrukcji potrzebnych do założonego przetworzenia sygnałów wymaganego do sterowania maszyny lub procesu
przez system PLC
Zadanie – Element nadzorujący wykonanie programu lub pewnej jego logicznej całości
Blok funkcyjny - element dynamiczny o wielu wejściach i wyjściach
-bloki funkcyjne są podstawowym narzędziem programowania obiektowego systemów PLC
-wyjścia bloku są zdeterminowane zarówno przez wejścia jak i przez historię działania bloku (część zmiennych jest zapamiętywana z poprzednich wywołań)
-"na zewnątrz" bloku są dostępne wyłącznie zmienne wejśiowe i wyjśiowe a nie są dostępne zmienne wewnętrzne
Standardowe bloki funkcyjne są częścią firmware’u sterownika i są dostępne w każdym systemie PLC:-elementy bistabilne,-elementy detekcji zbocza,-liczniki,-timery.
Niektóre (nie wszystkie systemy PLC umożliwiają budowę własnych FB podczas budowy oprogramowania.
Funkcja Element statyczny o wielu wejściach i zwracający jedną wartość określonego typu.
-Funkcyjne są również podstawowym narzędziem programowania obiektowego systemów PLC
-Wartość wyjścia funkcji jest zdeterminowana wyłącznie przez wartość jej wejść (funkcja nie posiada „pamięci”).
-„na zewnątrz” funkcji są dostępne wyłącznie zmienne wejściowe i jej wyjście, a nie są dostępne zmienne wewnętrzne
W każdym systemie PLC dostępny jest dość duży zestaw funkcji standardowych
-funkcje konwersji typu,
-funkcje arytmetyczne i matematyczne,
-funkcje porównania,
-funkcje wyboru,
-funkcje operujące na danych typu STRING,
-funkcje operujące na danych typu czasowego,
Niektóre (nie wszystkie) systemy PLC umożliwiają budowę własnych funkcji podczas budowy oprogramowania.
Zmienna globalna -Zmienna dostępna dla wszystkich elementów programu, zasobu lub konfiguracji.
-Zmienne globalne umożliwiają szybką wymianę danych w obrębie programu,
-Zaburzona jest sekwencyjność wykonania programu,
-„Dobre narzędzie do budowy zupełnie niezrozumiałych programów”,
-Szczegóły definiowania i stosowania zależne są od konkretnego systemu.
Zmienna bezpośrednio reprezentowana -Zmienna, której nazwą jest adres(wejścia, wyjścia lub komórki pamięci wewnętrznej).
Zasady adresacji są zależne od systemu i pomimo ogólnych podobieństw różnią się pomiędzy sobą.
Przykładowo: adresy wejścia binarnego w 3 systemach:
SIEMENS: 10.0, GEFANUC: %l1, ALLEN_BRADLEY: l1:0.0/0
Ścieżka dostępu –Element oprogramowania zapaeniający wymianę danych z innymi konfiguracjami lub konfiguracją a innym elementem(np. systemem SCADA)
„Nieformalne” elementy organizacyjne oprogramowania PLC – W
każdym rzeczywistym systemie PLC są również do dyspozycji różne
nietypowe (charakterystyczne tylko dla tego systemu) elementy
oprogramowania,
- Zasady ich konfiguracji i wykorzystania są różne i zależą od
konkretnej platformy
-Przykłady zostaną omówione dla systemów ALLEN – BRADLEY i
SIEMENS
ALLEN-BRADLEY: ogólna struktura oprogramowania:
SIEMENS SIMATIC S7 300 W tym systemie jest możliwość
samodzielnego definiowania FC i FB ponadto są stosowane
następujące elementy „nieformalne”:
-Bloki organizacyjne (OB.)
-Bloki danych (DB),
Typy danych definiowane przez użytkownika (User – Defined Data
Types:UDT
Blok organizacyjny (OB) to rodzaj „pomost” pomiędzy programem
użytkownika i systemem operacyjnym.
-OB. To jedyny element oprogramowania uaktywniany bezpośrednio z
poziomu OS.
- Każdy element programu aby mógł być wykonany musi być
wywołany z jakiegoś OB. Element nie wywołany w żadnym OB nie
będzie wykonany.
- Jest możliwy zapis programu lub jego części bezpośrednio w OB
-Różne części programu mogą być wywoływane przez różne bloki
organizacyjne.
-Są dostępne różne typy bloków, uaktywniane w różny sposób.
-Każdy OB Ma nazwę zastrzeżoną: OB<numer> ale można tym
nazwom przypisać także nazwy symboliczne.
Bloki danych (DB) – Blok danych nie zawiera żadnych
wykonywalnych instrukcji, służy on wyłącznie do przechowywania
danych.
-DB może być interpretowany jako struktura i dostęp do jego
elementów jest taki, jak do elementów struktury.
-Nazwa jest zastrzeżona: DB<numer>, ale nazwy symboliczne są
dozwolone i ich użycie jest zalecane.
- Przydział pamięci dla DB jest wykonywany automatycznie przez
kompilator,
-Niektóre typy danych mogą być przechowywane wyłącznie w DB
(np. STRING)
-Dostęp do DB spoza konfiguracji jest możliwy przy stosowaniu
firmowego oprogramowania SCADA SIEMENS(WinCC,
ProTool/Pro),
-Pewne bloki danych mogą być zapamiętywane po wyłączeniu
zasilania PLC (należy to zdefiniować podczas konfiguracji sprzętu)
Typ danych definiowany przez użytkownika (UDT ). UDT-szablon
bloku danych. [UDT]->DB1 i ->DB2 i ... i ->DBn
Ideą UDTjest budowa „szablonu” bloku danych, który może być
sklonowany w dużej liczbie bloków.
-Wszystkie bloki stowarzyszone z tym samym UDT mają tę samą
strukturę, ale są w pełni niezależne od siebie.
-Konstrukcja przydatna podczas budowy dużych aplikacji oraz
automatycznego generowania kodów źródłowych.
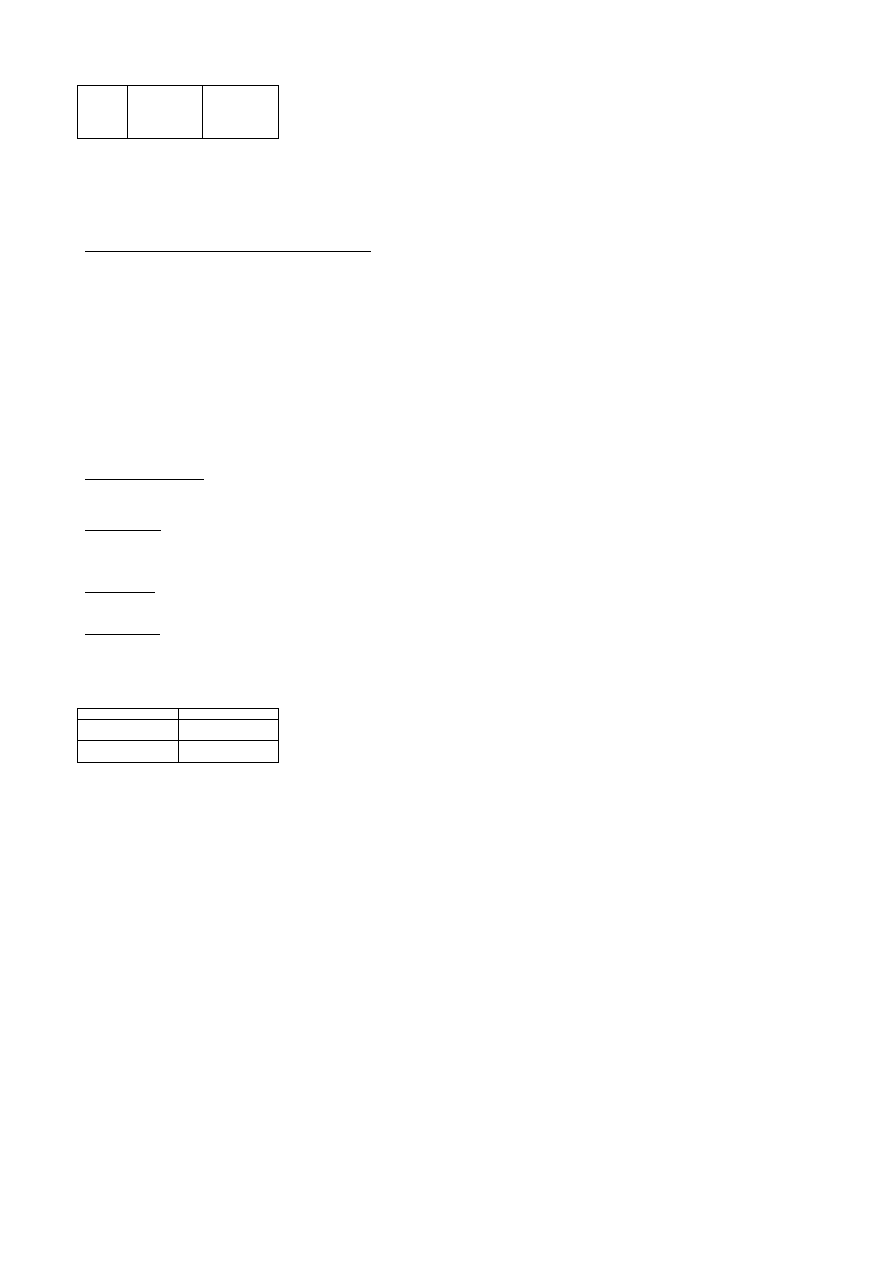
Typy danych stosowane w systemach PLC
- Norma 61131 dopuszcza do stosowania w systemach PLC wiele
różnych typów danych.
-Dostępność znormalizowanych typów danych na rożnych platformach
jest różna.
[1Typy danych]
[2Elementarne – liczbowe: całkowite, rzeczywiste, binarne; ciąg
znaków; czasowe: czas trwania, godzina dnia, data i godzina]
[2Rodzaje danych]
[2Pochodne – złożone: tablica, struktura; proste: okrojone,
wyliczeniowe]
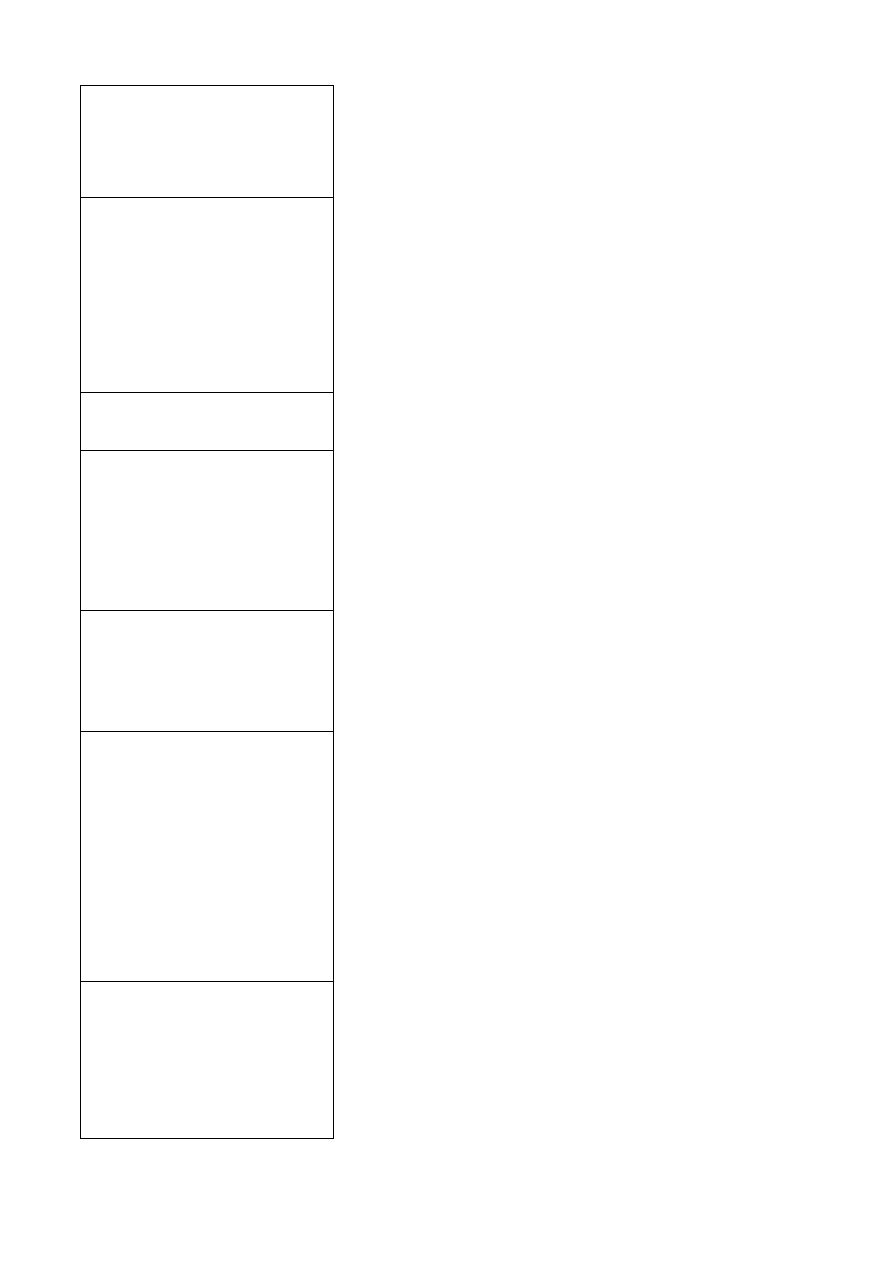
Typy zmiennych stosowane w systemach PLC
Typ zmiennej- Słowo kluczowe do deklaracji- Opis
Wewnętrzna- VAR- Zmienna lokalna, widoczna wyłącznie wewnątrz
danej POU
Wejściowa- VAR_INPUT- Zmienna służąca do podawania wartości
wejściowych nie może być modyfikowana
Wejściowa modyfikowana- VAR_IN_OUT- Zmiennawejściowa która
może być modyfikowana wewnątrz danej POU
Wyjściowa- VAR_OUTPUT- Zmienna służąca do podawania na
zewnątrz wyników działania POU
Tymczasowa- VAR_TEMP- Zmienna której wartość jest kasowana po
zakończeniu wykonywania danej POU
Zewnętrzna- VAR_EXTERNAL- Zmienna lokalna która może być
widoczna na zewnątrz POU(deklaracja używana wewnątrz POU)
Globalna - VAR_GLOBAL- Zmienna globalna
Bezpośrednia reprezentowana- Nie deklaruje się- Zmienna której
nazwa to adres dostępnej przestrzeni adresowej sterownika
[1Języki programowania PLC]-[Graf sekwencji]
[2Graficzne – język drabinkowy LD; język schematów blokowych
FBD]
[2Tekstowe – lista instrukcji IL; tekst strukturalny ST]
Język drabinkowy LD
-Sposób budowy programu jest zbliżony do projektowania układu
sterowania logicznego zrealizowanego w technice przekaźnikowej.
-Działanie programu jest analogiczne, jak działanie układu sterowania
logicznego zrealizowanego w technice przekaźnikowej
-Podstawowym elementem języka jest obwód lub szczebel,
przyłączony do szyn prądowych. Lewa szyna prądowa ma wysoki
potencjał (stan „1” logicznej), prawa może być interpretowana jako
masa.
-Wykonanie programu to „przepływ prądu” od lewej do prawej szyny,
sterowany stykami.
-Obwody są budowane ze styków, cewek oraz bloków
reprezentujących funkcje i instancje bloków funkcyjnych.
-Bloki reprezentujące funkcje i instancje FB są elementem „wtórnym”,
dodanym później.
Podstawowe elementy obwodu w języku LD:
Styki:
<***>
--||-- normalnie otwarty
--|/|-- normalnie zamknięty
--|P|-- reagujący na zbocze dodatnie
--|P|-- reagujący na zbocze ujemne
Styk reaguje na wartość logiczną zmiennej typu BOOL, która jest z
nim skojarzona. Ze stykiem można skojarzyć zmienne: wejściowe,
wyjściowe i wewnętrzne. Styk nie może modyfikowac wartości
zmiennej skojarzonej z nim.
Cewki
<***>
--( )—cewka zwykła
--( /)—cewka negująca
--( S)—cewka ustawiająca
--( R)—cewka kasująca
--(M )—cewka z pamięcią
--( SM)—cewka ustawiająca z pamięcią
--(RM )—cewka kasująca z pamięcią
--(P )—cewka reagująca na zbocze rosnące
--( N)—cewka reagująca na zbocze malejące
Cewka modyfikuje wartość zmiennej typu BOOL, która jest z nią
skojarzona. Z cewkami można skojarzyć zmienne wewnętrzne i
wyjściowe a nie można wyjściowych
Choć nie jest to nigdzie wprost podane w normie, to w większości
środowisk programowych cewka powinna być ostatnim elementem
obwodu.
Wywoływanie funkcji i instancji bloków funkcyjnych w języku LD:
EN – służy do uruchomienia wykonania bloku – blok jest
wykonywany tylko wtedy gdy EN=1, a nie wykonywany, gdy EN =0.
ENO=1 – informuje, że blok został wykonany poprawnie, ENO = 0 –
blok nie wykonywany lub wykonany niepoprawnie
1.Wykonanie żadnego elementu obwodu nie zaczyna się dopóki ni
wyznaczono jego wszystkich wejść. 2.Wykonanie żadnego elementu
obwodu nie jest zakończone dopóki nie wyznaczono wszystkich jego
wyjść. 3.Wykonanie programu nie jest zakończone dopóki nie
wyznaczono wszystkich wyjść z tego programu. 4. W obrębie obwodu
elementy są wykonywane od strony lewej do prawej, a kolejne
obwody są wykonywane od góry do dołu, chyba że zastosowano
instrukcje skoku, która zmieniła tę kolejność
Podsumowanie:
1.Język LD jest przeznaczony do realizacji układów sterowania
logicznego oraz prostszych układów regulacji ciągłej (nie
zawierających złożonych operacji matematycznych, zbyt
rozbudowanych warunków i alternatywnych ścieżek wykonania).
2.LD dobrze się nadaje także do łączenia w całość mniejszych
elementów oprogramowania, napisanych z użyciem innych języków.
3.Interpretacja i kolejność wykonania programu jest jasna i
jednoznaczna.
4.łatwa diagnostyka błędów dzięki wyjściu ENO.
5. Nie jest zalecane używanie instrukcji skoków, w przypadku aplikacji
wymagających użycia tej konstrukcji lepiej użyć Graf Sekwencji SFC
Język listy instrukcji IL
Jest to język tekstowy typu asembler. W wielu przypadkach jest on
bezpośrednio interpretowany przez CPU (nie jest kompilowany). Ma
on największe możliwości ze wszystkich omawianych języków.
Program w IL to sekwencja instrukcji, z których każda się zaczyna w
nowej linii.
Wszystkie operacje są wykonywane na zawartości roboczej komórki
pamięci CPU, nazywanej akumulatorem.
Sposób realizacji akumulatora jest zależny od sprzętu: GE FANUC: 1
akumulator liczbowy 32bitowy i 1 binarny (oba definiowane przez
użytkownika) SIEMENS: 2 lub 4 akumulatory 32 bitowe i bit RLO
jako akumulator binarny.
Składnia pojedynczej liniii:
(etykieta)—operator—(modyfikator) – operand //komentarz
Interpretacja wykonania instrukcji:
ACC
n
:=ACC
p
{operator}OPERAND gdzie: n-nowa zawartość
akumulatora p-poprzednia zawartość akumulatora.
-Norma IEC 1131 definiuje podstawowy zestaw operatorów Listy
instrukcji. Operatory te obejmują wszystkie podstawowe operacje
logiczne i arytmetyczne.
-IL zapewnia także możliwość wywoływania wszystkich funkcji oraz
instancji bloków funkcyjnych dostępnych na danym
sterowniku(standardowych i definiowanych przez użytkownika)
-Należy zawsze zwracać uwagę na zgodność zawartości akumulatora i
operandu. W szczególności powinny one być tego samego typu.
-Nazwy instrukcji i składnia języka dla poszczególnych systemów PLC
mogą się różnić, ale „filozofia” programowania jest ta sama
Podsumowanie:
1.Język IL jest przeznaczony do realizacji niewielkich, krytycznych
pod względem funkcjonalności, jakości i szybkości działania
fragmentów programów(np.FC lub FB), które mogą być wywoływane
w programach napisanych w innych językach
2.Wadą znormalizowanego IL jest brak diagnostyki błędow. W
niektórych systemach(SIEMENS) jest diagnostyka niektórych błędów.
3.Interpretacja programu nie jest zdefiniowana w normie, w
szczególności nie wiadomo, w jaki sposób są wykonywane operacje na
złożonych typach danych.
Język Schematów funkcyjnych FBD – Język graficzny, budowa
programu jest podobna do budowy np. diagramu w SIMULINK-u.
Język zbliżony do języka drabinkowego
Tekst Strukturalny ST – Język tekstowy wysokiego poziomu zbliżony
do PASCALA. Dostępne są pętle i instrukcje wyboru oraz wyrażenia
(nawet bardzo złożone). Plik źródłowy musi być kompilowany.
Graf Sekwencji – Jest to graficzne narzędzie programowe, bazujące na
metodologii sieci Petriego typu P/T, umożliwiające realizację
algorytmów sterowania sekwencyjnego(tj. takich, w których da się
wyróżnić poszczególne etapy i wykonywane w nich działania oraz
zdefiniować warunki przejścia od jednego etapu do następnego).
Podstawowe elementy grafu:
1.Etapy , 2.Przejścia, 3.Działania
Etap określa, w którym miejscu realizacji program się aktualnie
znajduje. Powinien mieć unikalną nazwę skojarzeniową. Każdy etap
może tylko jeden raz występować w jednym grafie. Graficzna
reprezentacja etapu jest następująca:
[nazwa] – etap początkowy
|
|
[nazwa] – etap
|
Przejście – określa warunki logiczne, jakie muszą być spełnione aby
nastąpiło przejście od etapu poprzedniego do następnego. Warunki te
mogą być zapisane w każdym z wcześniej omówionych języków:
Działanie opisuje, co ma być wykonane w etapie, z którym jest ono
skojarzone. Reprezentacja graficzna działania jest następująca:
kwalifikator|nazwa działania|zmienna zwrotna
instrukcje
Kwalifikator działania
Określa korelację czasową pomiędzy czasem aktywności etapu i
czasem aktywności działania. W najprostszym przypadku działanie jest
wykonywane przez cały czas aktywności etapu(Inne kalifaktory – zob
Legierski, Lewis)
Podstawowe typy sekwencji:pojedyncza,wyboru,współbieżne
Aby zakończenie było możliwe, to wszystkie etapy współbieżne muszą
być aktywne!
Podstawowe reguły budowy i wykonania SFC:
Każde 2 etapy muszą być rozdzielone przejściem i każde 2 przejścia
musza być rozdzielone etapem,
Aby nastąpiło przejście do następnego etapu to:
-Poprzedni etap musi być aktywny,
- Musi być spełniony warunek logiczny na przejście.
Sieci komputerowe są obecnie stosowane powszechnie w przemyśle na wszystkich poziomach sterowania, zarówno na niższych (sterowanie bezpośrednie) jak i na wyższych
(sterowanie decyzyjne). Na różnych poziomach hierarchicznego systemu sterowania są stosowane różne typy sieci: -na
poziomach niższych – sieć przemysłowa -na poziomach wyższych- sieć biurowa
Wymaganie
Sieć biurowa
S.
przemysłowa
Ilość
danych
Duża [Mb]
Mała
[bity,bajty]
Determiniz
m czasowy
Nie wymagany
wymagany
Szybkość
dzialania
mała
duża
Natężenie
przepływu
danych w
sieci
Duże
wiadomości o
zmiennym i
nieprzewidywal
nym natężeniu
Duża liczba
krótkich
wiadomości o
prawie stałym
i dającym się
oszacować
natężeniu.
Dodatkowe wymagania wobec sieci przemysłowej: - łatwość dołączania prostych urządzeń - możliwość zasilania elementów sieci przez magistralę
- łatwość lokalizacji uszkodzeń - odporność na błędy w montażu i konfiguracji - odporność na zakłócenia
Przykłady sieci przemysłowych: HART, Profibus, Modbus, DeviceNet, LonWorks, Ethernet(wersja przemysłowa).
Model sieci wg OSI. (7warstwowy)
7 aplikacji
6 prezentacji
5 sesji
4transportowa
3sieciowa
2łącza danych
1fizyczna
Funkcje wartwy fizycznej OSI:
- specyfikacje medium fizycznego - definiowanie sygnałów elektrycznych, optycznych - taktowanie interfejsu
- specyfikacje interfejsu NIC -Network interface card - sprawdzanie błędów transmisji - kodowanie binarne Funkcje warstwy
łącza danych: -mostkowanie i przełączanie ramek – ramkowanie danych – tworzenie architektury sieci
fizycznej – synchronizacja transmisji – kontrola błędów (suma kontrolna) – sterowanie i kontrola
przepływu danych – adresowanie portów (adres MAC) Warstwa liniowa- 2 podwartwy : wyższa LCC, niższa MAC.
Funkcje warstwy aplikacji OSI: -jest najbliżej użytkownika - steruje integralnością danych i odtwarzaniem błędnych
informacji -aplikacje np. sterownik „soft PLC”
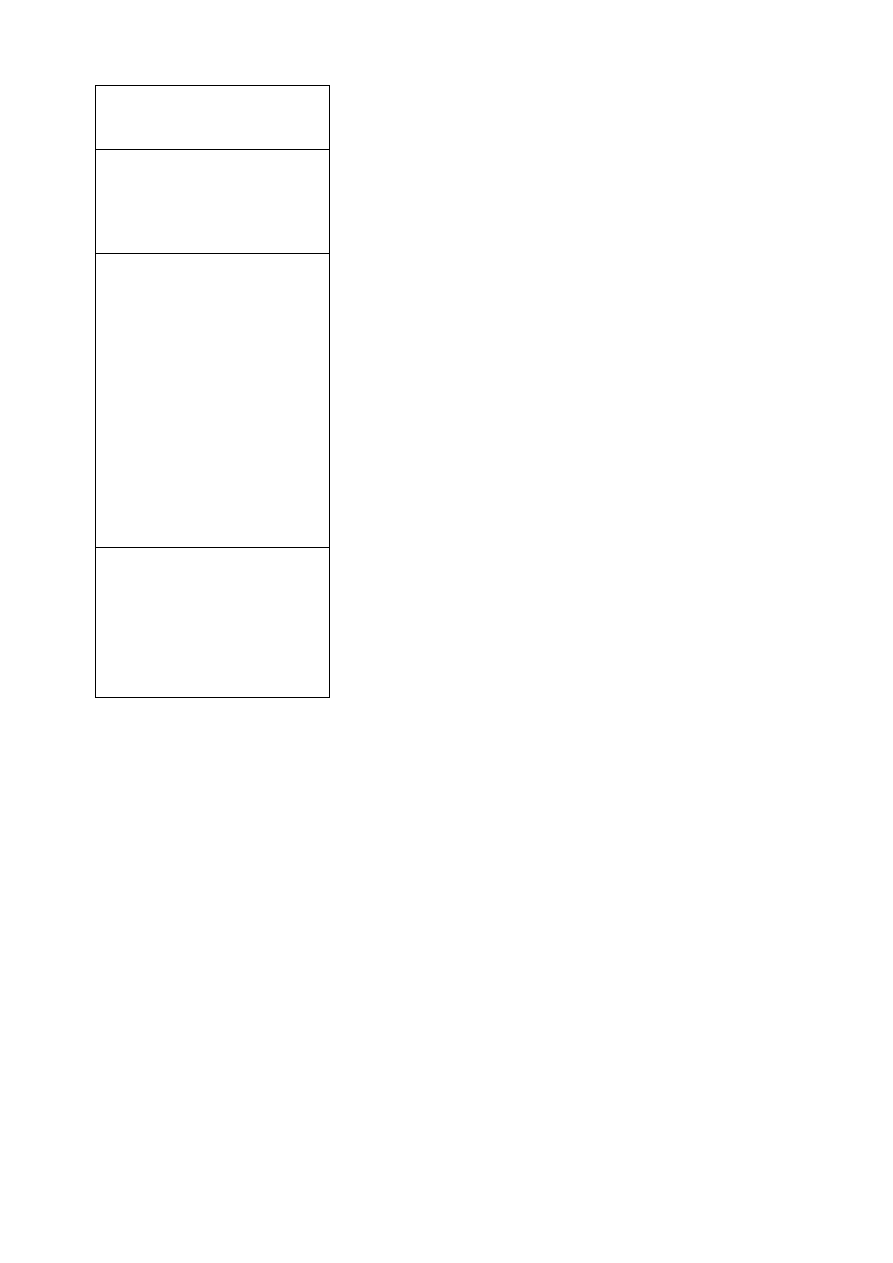
Topologie sieci przemysłowych:
Nazwa
Zalety
Wady
magistra
lowa
Prosta budowa,
mała ilość
przewodów,
awaria jednego
węzła nie
powoduje
awarii sieci,
łatwość
rozbudowy
Trudna
diagnostyka
błędów, awaria
terminatora lub
kabla
uniemożliwia
działanie,
możliwe
opóźnienia
pierście
niowa
Proste
okablowanie,
łatwa
diagnostyka
błędów
Awaria jednego
węzła lub kabla
uniemożliwia
działanie,
złożona
konstrukcja
węzłów
gwiaździ
sta
Awaria jednego
węzła nie
powoduje
awarii sieci,
łatwość
rozbudowy,
łatwa
diagnostyka
błędów i awarii
Wymagany
HUB, awaria
HUBa- awaria
sieci, duża ilość
kabli
Siatkow
a
(mieszan
a)
Wysoka
niezawodność
(każdy węzeł
można osiągnąć
Duża ilość
kabli, złożona
komunikacja
(wiadomości
7 aplikacji
6 prezentacji
5 sesji
4transportowa
3sieciowa
2łącza danych
1fizyczna
System otwarty A System
otwarty B
System otwarty B
różnymi
drogami awaria
węzła nie
powoduje
awarii całości
przechodzą
przez węzły
pośrednie)
Protokoły dostępu do medium: -CSMA/CD – nie używana w sieciach przemysłowych( nie zapewnia determinizmu czasowego)
- protokoły znacznikowe – z przekazywaniem znacznika (token passing), pierścień znacznikowy (token ring) : pomiędzy węzłami sieci przekazywany jest znacznik – token,
prawo do nadawania w danej chwili ma tylko ten węzeł z tok enem, maksymalny czas posiadania tokena i kolejność jego przekazywania są zdefiniowane, ZALETY: determinizm
czasowy, brak ograniczeń na minimalną długość wiadomości, niezależność szybkości działania od obciążenia
WADY: skomplikowana obsługa błędów związanych ze zgubieniem bądź powieleniem znacznika, konieczność ciągłego przekazywania znacznika pomiędzy węzłami.
–odpytywanie – polling (sieci typu master/slave) komunikacja odbywa się wyłącznie pomiędzy master a slave na zasadzie transakcji – pytanie-odpowiedz. Slave – nie
inicjalizuje komunikacji, może odpowiedzieć na zapytanie, Master – ma uprawienie do wysyłania danych i zapytań do stacji slave, może inicjalizować komunikację. ZALETY:
prostota, slave nie musi być komputerem WADY: całkowity rozpad sieci w wyniku awarii mastera.
Na poziomie warstwy łącza logicznego (wyższej) stosowane są protokoły:
-bezpołączeniowe (datagram) - wiadomość jest odpowiednio formatowana i wysyłana, brak sprawdzenia czy wiadomość dotarła do odbiorcy, nie odebranie wiadomości przez
odbiorcę lub błąd w transmisji prowadzą do utraty wiadomości
-połączeniowe (connection – oriented)- etap I- nawiązanie połączenia, etap II – wymiana danych w obie strony(dowolne dane i komunikaty), etap III- zamknięcie połączenia.
Poprawność odbioru jest kontrolowana i są wysyłane potwierdzenia odbioru. W razie błędu przesyłane jest żądanie powtórzenia transmisji, długotrwały brak potwierdzenia lub
żądania retransmisji powoduje powtórne wysłanie ostatniego komunikatu, brak odpowiedzi po kilku próbach oznacza awarię odbiorcy. ZALETY: pewność i niezawodność
transmisji, łatwość wykrycia awarii WADY: mniejsza szybkość, konieczność przesyłania potwierdzeń, duża złożoność obsługi.
Sieć przemysłowa PROFIBUS:
Jeden z najbardziej rozpowszechnionych standardów sieci przemysłowych, 3 wersje standardu: FMS – najbardziej rozbudowany i uniwersalny, pozwala na realizację złożonych
zdań komunikacji i na łączenie z prostymi urządzeniami. DP – najszybsza wersja przeznaczona do łączenia rozproszonych konfiguracji sterowników PLC. PA – wersja
iskrobezpieczna i pozwalająca na zasilanie urządzeń z magistrali, dedykowana do współpracy z przetwornikami inteligentnymi.
3 warstwy modelu OSI dla PROFIBUSa:
warstwa 1- fizyczna (medium fizyczne – skrętka lub światłowód, maksymalnie 32 urządzenia w segmencie max 128 w całej sieci- ograniczeniem długość pola adresowego,
topologia pojedynczego segmentu magistralowa, max. długość doprowadzeń węzłów 0.3m, prędkość transmisji- 9.6, 19.2, 93.75,187.5, 1500, 12000 kbit/s, węzły sieci dołączane
9cio stykowym złączem ISO, topografia styków w złączu: 1-SHIELD ,2-RP,3-RxD/TxD-P(dane sygnał „+”),4-CNTR-P,5-DGND,6-VP,7-RP,8-RxD/TxD-N(dane sygnał „-
”),9-CNTR-N) bity kodowane napięciem różnicowym między stykami 3 a 8 – stałe napięcie dodatnie „1”, stałe napięcie ujemne „0”, nadajnik powinien być zabezpieczony przed
kolizjami , nie pracujące nadajniki w stanie wysokiej impedancji. Stan spoczynkowy linii to „1” i musi on być zapewniony przez terminatory, najprostszy terminator to rezystor
150 Ohm załączony pomiędzy stykami 3 i 8.
warstwa 2-liniowa- protokół dostępu do kabla jest złożeniem protokołu znacznikowego oraz metody odpytywania. W sieci mogą występować wezły czynne MASTER jak i bierne
SLAVE ( w sieci DP-1 węzeł MASTER + 1rodzaju + 1 MASTER 2 rodzaju – programator). Transakcja odbywa się z wykorzystaniem usług realizowanych przez węzły
nadrzędne. 4 rodzaje usług: a). wysyłanie danych z potwierdzeniem, b) wysyłanie danych bez potwierdzenia c) wysyłanie danych i odebranie odpowiedzi d) cykliczne wysyłanie
danych i odebranie odpowiedzi.
warstwa 7 aplikacji. VFD- wirtualne urządzenie sieciowe, OD –słownik obiektów- zawiera listę wszystkich obiektów, które mają się komunikować z innymi. Inne węzły mają
dostęp tylko do danych zdefiniowanych w tej liście. Wymiana danych odbywa się wg. Schematu klient-serwer. Dla każdej pary portów w obu węzłach jest tworzona osobna
relacja komunikacyjna dostępna dla programów wykonywanych w tym węźle. Obiekt jest podstawowym elementem na którym wykonywane są usługi. Obiektami są: zmienne,
typy danych , zdarzenia opisujące wyjątki lub szczególnie stany powstałe w programie. Domena – obszar pamięci do którego można załadować program, dane czy parametry.
Program który można zatrzymać, uruchomić itp. Obiekt fizyczny opisany przez jego adres i długość ale o nieznanej strukturze wewnętrznej. Usługi udostępniają programom w
innych węzłach obiekty zdefiniowane w dowolnym węźle. Usługa zdefiniowana przez 4 operacje: REQUEST- wywołanie usługi, INDICATION-sygnalizacja odebrania
wywołania, RESPONSE- przekazanie potwierdzenia, CONFIRM- sygnalizacja odebrania potwierdzenia.
Schemat wywołania usługi:
KLIENT SERWER
Rodzaj usługi
Request->indication
Confirm<-response
Usługa potwierdzana
Indication<-request
Usługa nie
potwierdzana

SCADA
– Zdalny system monitorowania i nadzoru procesów
technologicznych.
ma z założenia zastępować tablice synoptyczne
stosowane w sterownikach.
współpracuje zawsze z urządzeniami mającymi
możliwości komunikacji cyfrowej (regulatory cyfrowe,
przetworniki inteligentne).
pracuje zawsze w czasie rzeczywistym.
Typowe funkcje systemu SCADA:
uruchamianie i zatrzymywanie całej instalacji lub jej
części.
nadzór przebiegu procesu
wykrywanie i sygnalizacja stanów awaryjnych
archiwizacja danych procesowych
zadawanie parametrów regulatorów pracujących na
stopniu bezpośrednim
sterowanie zdalne (automatyczne lub ręczne)
Dodatkowe funkcje:
samostrojenie i autoadaptacja algorytmów regulacyjnych
optymalizacja sterowania na poziomie
bezpośrednim
W typowej sytuacji
różne grupy użytkowników mają dostęp
do różnych funkcji systemu. Każda powinna mieć dostęp do
swojej części i nie powinna mieć dostępu do innych
Architektura systemu SCADA
Każdy system SCADA jest budowany ściśle pod kątem
wymagań określonego systemu, który ma nadzorować.
Składniki systemu:
sterownik PLC, system akwizycji danych lub urządzenie
inteligentne
system komunikacyjny ( port komunikacyjny, sieć,
łączność bezprzewodowa)
komputer, który pełni funkcje: (stacja robocza, serwer
komunikacyjny, serwer danych)
Rozbudowany SCADA zawiera 5 poziomów
1.
urządzenia polowe: przetworniki inteligentne, sterowniki
PLC
2. Stacje akwizycji danych z urz. polowych (RTU)
3.
system komunikacyjny zrealizowany z użyciem sieci
przemysłowej lub urządzeń bezprzewod.
4. Stacje operatorskie z zaimplementowanymi aplikacjami
użytkownika
5.
System komputerowy na poziomie zarządu
Wymiana danych w systemie SCADA
Najczęściej wymiana danych odbywa się wg schematu
klient-
serwer gdzie klientem jest aplikacja użytkownika, a
serwerem jest:
- sterowni
k PLC połączony z aplikacją za pośrednictwem
drivera komunikacyjnego (prostsze przypadki). Komunikacja
jest wykonywana na końcu cyklu programowego.
- serwer danych aplikacji
Elementem niezbędnym do komunikacji jest zawsze driver
komunikacyjny, który jest dedykowany do określonego
sprzętu.
Komponenty systemu SCADA
1.
Sprzętowe: - sprzęt sieciowy, - serwery danych, - serwery
aplikacji, -
stacje robocze: (panel operatorski o różnych
możliwościach i złożoności, lub komputer klasy PC)
2. Programowe: - oprogramowanie komunikacyjne
-
środowisko uruchomieniowe
- system operacyjny

- oprogramowanie baz danych
-
środowisko konfiguracyjne
Oprogramowanie i jego elementy
Środowisko konfiguracyjne, umożliwiające budowę i
testowanie aplikacji (symulator)
Środowisko uruchomieniowe (runtime), zapewniające
uruchomienie i działanie aplikacji w czasie rzeczywistym
Driver komunikacyjny, pozwalający na realizację
komunikacji pomiędzy aplikacją i urządzeniem.

Podstawowe elementy
z których budowana jest
aplikacja SCADA:
-zmienne (Tags), - obiekty graficzne,
- archiwa, -skrypty i funkcje, -receptury
Znaczna część aplikacji użytkownika ma charakter
graficzny i pogrupowana jest na „ekrany”
Zmienne („Tagi”)
Wewnętrzne, lokalne: są to zmienne wewnętrzne
aplikacji, które nie mają możliwości połączenia ze
zmiennymi sterownika. Ich ilość jest limitowana.
Wejścia/wyjścia globalne: są to zmienne, które mają
przypisane adresy w przestrzeni adresowej
urządzenia, z którym się komunikują i ich wartości
mogą być zmieniane zarówno z poziomu urządzenia,
jak i z poziomu aplikacji.
Możliwe są następujące typy: -binarne (dyskretne), -
całkowite, - czasowe, -tekstowe
- rzeczywiste, - timery, - liczniki.
Zmienne mogą mieć też przypisane dodatkow atrybuty
ułatwiające budowę aplikacji (definiowane podczas
konfiguracji zmiennych), np.:
-
wartości początkowe,
-
zakresy dopuszczalnych wartości
-
alarmy różnych typów
- przypisanie zmiennej do archiwum
-
częstotliwość odczytu/zapisu (tylko global.)
Obiekty graficzne
-
okienka wejściowe
-
okienka wyjściowe
-elementarne figury geometryczne
-
przyciski, przełączniki, suwaki, lampki
-
wskaźniki analogowe, pola tekstowe
Mogą być powiązane z określonymi zmiennymi
(pokazuje wartość, zmienia wart.)
Mogą być powiazane z funkcjami, skryptami.
Skrypty i funkcje
Elementy oprogramowania wykonujące różne operacje
na zmiennych: oper. obliczeniowe, zapis i odczyt do
archiwum itp.
Są pisane z użyciem zestawu instrukcji
charakterystycznego dla danego środowiska lub np. z
użyciem języka Visual Basic.
Metody aktywacji skryptów/funkcji
Jednorazowo podczas startu lub zatrzymania
cyklicznie podczas pracy aplikacji (w sposób ciągły
lub z zadanym okresem próbkowania
z użyciem przycisku – różne opcje
przy zmianie wartości określonej zmiennej
przy wystąpieniu alarmu/ostrzeżenia
Archiwa i bazy danych
Archiwizacja danych związanych z prowadzeniem
procesu jest jednym z fundamentalnych zadań aplikacji
SCADA.
Dane procesowe archiwizowane w typowych formatach
np. w pliku .csv lub w bazie danych (MS Access, MS
SQL Server). Archiwizacja uruchamiana w różny
sposób:
-cyklicznie
-po aktywacji przyciskiem
-
po zmianie wartości określonej zmiennej
Receptury
Stosowane przy wytwarzaniu produktów, które są
zestawiane z pojedynczych składników w różnych
proporcjach i w zależności od proporcji tych samych
składników wejściowych możemy otrzymać różne
produkty. Receptura ma postać rekordu danych, w
którym są opisane poszczególne składniki oraz ich
ilości.
Minimalizacja bezpośrednich wskaźników jakości regulacji – zadanie optymalizacyjne
najczęściej realizowane na poziomie sterowania bezpośredniego;
Bezpośrednie wskaźniki jakości – wskaźniki, których wartość jest wyznaczana
bezpośrednio na podst. przebiegu czasowego uchybu regulacji w układzie; w wielu
wypadkach mają bezpośredni związek z wymaganiami konkretnego procesu
technologicznego.
1. czas regulacji T – czas po jakim uchyb regulacji jest w sposób trwały mniejszy od
założonej wartości Δ (najczęściej Δ=5%)
2. odchylenie maksymalne e
m
3. przeregulowanie χ (
)
Modele matematyczne obiektów regulacji na poziomie sterowania bezpośredniego:
Niezależnie od systemu sterowania konstrukcja regulatora optymalnego jest dokonywana w
oparciu o model matematyczny sterowanego procesu (proces = wszystko, co jest poniżej
elementu decyzyjnego).
Model matematyczny – narzędzie pozwalające przewidzieć i ocenić zachowanie się
systemu pod wpływem różnych oddziaływań sterujących; jest też podstawą przy budowie
narzędzi informatycznych służących do badań symulacyjnych. W przypadku jego braku
należałoby wykonywać eksperymenty na rzeczywistym systemie (b. niekorzystne). Model
jest zawsze pewnym uproszczeniem rzeczywistości; klasyfikacja modeli jest dość złożona;
przed budową modelu można próbować dokonać dekompozycji lub agregacji systemu.
Dekompozycja – podział złożonego systemu na mniejsze, niezależne części, mogące być
analizowane, modelowane oddzielnie; b. ułatwia analizę systemu (analiza części jest
prostsza niż całości).
Agregacja – podczas budowy modelu uwzględnia się tylko te cechy procesu które są
istotne z punktu widzenia sterowania; b. ułatwia budowę modelu (pominięcie nieistotnych,
a komplikujących budowę modelu szczegółów).
Cele modelowania. Jakiemu celowi model ma służyć? (inny model do symulacji
zachowania sie procesu, inny do budowy algorytmu sterowania procesem) – odp. na to
pytanie determinuje wybór kategorii i struktury modelu.
Kategoria i struktura modelu – określana na podstawie teorii opisującej procesy zachodzące
w obiekcie i wyników doświadczalnych; ściśle związana z algorytmem sterowania, który
chcemy zbudować w oparciu o model.
Identyfikacja – jej celem wyznaczenie liczbowych wartości parametrów modelu,
zaproponowanego w poprzednim etapie od strony jakościowej. 2 metody identyfikacji:
-bierna – gdy nie możemy wykonać eksperymentu na obiekcie; mierzymy sygnały
wejściowe i wyjściowe obiektu podczas normalnej pracy systemu, następnie
identyfikujemy parametry modelu metodami statystycznymi na podst. korelacji wejścia i
wyjścia; skomplikowana i mało dokładna
-czynna – stosujemy ją zawsze gdy można; przeprowadzamy zaplanowany eksperyment na
obiekcie i na jego podstawie wyznaczamy parametry modelu;
Równanie stanu systemu dynamicznego ciągłego w dziedzinie czasu
f(..)-funkcja nieliniowa, niestacjonarna, opisująca związek między stanem w chwili
następnej a sterowaniem i stanem w chwili poprzedniej; g(..) – funkcja nieliniowa,
niestacjonarna, opisująca związek między sterowaniem, stanem i wyjściem.
Równanie stanu dla sytemu liniowego stacjonarnego o parametrach skupionych:
A-macierz stanu systemu, B –sterowań, C – wyjść, D – bezpośrednich sterowań
Transmitancja operatorowa
U(s)->obiekt->Y(s)
U(s)-transformata Laplace’a wejścia (sterowania); Y(s) – tr. L. wyjścia
zał. warunki początkowe na wszystkie zmienne stanu są zerowe.
Transmitancja operatorowa G(s) obiektu regulacji – stosunek transformaty Laplace’a
wyjścia obiektu Y(s) do tr. L. sterowania U(s) przy zerowych warunkach początkowych:
Opisuje ona tylko sterowalną i obserwowalną częśc systemu. Wzór na transmitancję, dla
rzeczywistego systemu dynamicznego może być wyprowadzony z równania stanu ( o
parametrach skupionych).
Transmitancja zastępcza - jej parametry mogą być wyznaczone w prosty sposób (na podst.
odpowiedzi skokowej obiektu, bez konieczności znajomości modelu dokładnego).
Model Kupfmullera I rzędu: G(s)=(k*exp(-τs))/(Ts+1). Transmitancja ta jest nazywana
transmitancją zastępczą obiektu regulacji; jej parametry(nazywane parametrami
zastępczymi obiektu): -stała czasowa T, -czas opóźnienia (martwy) τ .
Model Kupfmullera II rzędu: G(s)=(k*exp(-τ_2*s))/[(T_1*s+1) (T_2*s+1)]. Parametry
zast.: stałe czasowe T1 i T2, -czas martwy τ2 .
Model Strejca bez opóźnienia: G(s)=k/ (T_n*s+1)^n. Parametry zast.: rząd transmitancji n,
stała czasowa Tn.
Model Strejca z opóźnieniem: G(s)= [k*exp(-τ_n*s)]/[(T_n*s+1)^n]. Parametry zast: rząd
transmitancji n, stała czasowa Tn, czas martwy τ_n
Ogólna idea identyfikacji parametrów transmitancji zastępczej na przykładzie transmitancji
zgodnie z modelem Kupfmullera I rzędu (na wykresie zależność y(t)):
Parametry transmitancji zast. dobieramy tak, by odpowiedzi skokowe: modelu i obiektu jak
najmniej się między sobą różniły. Dobór parametrów można wykonać metodami:
graficzną, najmniejszych kwadratów. Z wykorzystaniem modelu zast. można zbudować
regulator suboptymalny (lub optymalny).
Synteza suboptymalnego regulatora PID:
Rozważmy układ zamknięty regulacji:
R(s) - transf. Laplace’a wartości zadanej; E(s) –tr. L uchybu regulacji; U(s)-tr.L.
sterowania; Y(s)- tr. L. wielkości regulowanej; G(s) – transmitancja obiektu regulacji;
G_r(s)-transmitancja regulatora.
Załóżmy, że obiekt regulacji jest opisany transmitancją zastępczą zgodnie z modelem
Kupfmullera I rzędu, której parametry wyznaczono na podst. identyfikacji.
Regulatorem jest idealny regulator PID (proporcjonalno-calkująco-różniczkujący) o
transmitancji: G_r(s)=k_r+(k_r/T_i)(1/s)+k_r*T_d*s. PID jest najcześciej stosowany w
przemyśle (80% wszystkich aplikacji).
Parametry regulatora PID: k_r – wzmocnienie proporcjonalne regulatora, T_i - czas
całkowania ( zdwojenia, izodromu), T_D – czas różniczkowania(wyprzedzenia).
Synteza regulatora optymalnego polega na doborze takich parametrów, które zapewnią
minimalną wartość przyjętej funkcji kosztu.
Dobór parametrów zawsze dokonywany z użyciem modelu. Może być dokonany
metodami: -analitycznymi, -numerycznymi, -z wykorzystaniem gotowych wzorów.
Zakładamy, że regulator ma zapewnić suboptymalne sterowanie w sensie następujących
funkcji kosztu: 1. I_1=T_r , χ≈0% 2. I_2=T_r, χ≤20% 3. I_3=
Realizacja algorytmów sterowania optymalnego z wykorzystaniem techniki cyfrowej.
T.cyfr. pozwala na łatwą realizację każdego algorytmu sterowania (warunek:
realizowalność fizyczna). Sterowniki i regulatory są zróżnicowane pod wzgl. możliwości i
ceny, ale ich zasadnicze elementy działania są wspólne dla wszystkich rozwiązań. Każdy
regulator cyfrowy jest systemem czasu rzeczywistego. Znaczny wpływ na wartość funkcji
kosztu w ukł. sterowania cyfrowego jest okres próbkowania.
Cyfrowa realizacja regulatora PID. Dyskretne algorytmy PID otrzymujemy po
dyskretyzacji algorytmu ciągłego o postaci:
dt
t
de
T
k
d
e
T
k
t
e
k
t
u
d
r
t
i
r
r
)
(
)
(
)
(
)
(
0
Założenia do dyskretyzacji:
-okres próbkowania jest stały i równy T
_p;
-Dyskretne chwile czasu są oznaczane przez 1, 2, …, n-1, n, n+1, ….
-Wartości sterowania i uchybu w dyskretnych chwilach czasu oznaczamy przez u
_n
oraz
e
_n
.
-Pochodną zastępujemy ilorazem różnicowym,
-Całkę zastępujemy w najprostszym wypadku sumą.
Algorytm pozycyjny PID:
1
0
2
1
1
n
r
p
n
n
d
r
i
p
n
n
T
e
e
kT
e
T
kT
ke
u
Zalety: Możliwość realizacji każdej wersji algorytmu ( P, PD, PI, PID )
Wady: Konieczność zabezpieczania przed przepełnieniem części całkującej;Duża
złożoność obliczeniowa ( wyznaczanie wartości całki w każdym kroku );Brak
zabezpieczenia przed dużymi skokami wartości sterującej
Algorytm przyrostowy PID: Jest otrzymany po zróżnicowaniu algorytmu pozycyjnego. W
każdym kroku jest liczony przyrost sterowania w stosunku do poprzedniego kroku.
Oznaczenia:
3
2
1
1
2
2
1
1
1
2
n
n
n
n
n
n
n
n
n
n
e
e
e
e
e
e
e
u
u
u
W każdym kroku liczony jest przyrost sygnału sterującego w stosunku do sygnału w kroku
poprzednim:
1
2
1
1
n
p
d
n
i
p
n
n
e
T
kT
e
T
kT
e
k
u
Zasady poprawnego doboru okresu próbkowania
1.Okres próbkowania T_p jest jednym z najważniejszych parametrów pracy każdego
układu cyfrowego.
2.Poprawny dobór okresu próbkowania ma kluczowe znaczenie dla poprawnego działania
układu regulacji cyfrowej: zapewnia optymalną jakość regulacji i częściową filtrację
zakłóceń.
3. Okres T_p można dobrać na podst.: ch-ki częstotliwościowej układu zamkniętego
(regulator+obiekt); parametrów odpowiedzi skokowej obiektu regulacji.
Ch-ka częstotl (ta po lewej).: ω
f
– pulsacja rezonansowa, ω
b
– szerokość pasma
przepustowości,
Odpowiedź skokowa: T – zastępcza stała czasowa, τ - zastępczy czas martwy, T
95
– czas,
po jakim odpowiedź obiektu osiąga 95% odpowiedzi ustalonej.
Zasady doboru okresu próbkowania
Tw Shannona
Częstotliwość
własna
95% stanu
ustalonego,
Stała czasowa
Czas
różniczkowania
regulatora
f
p
T
1
)
8
/
1
16
/
1
(
95
)
6
/
1
12
/
1
(
T
T
p
T
T
p
)
5
.
0
25
.
0
(
d
p
T
T
)
5
.
0
1
.
0
(
b
p
T
Klasyfikacja sprzętu do realizacji sterowania cyfrowego:
Urządzenie sterowania cyfrowego:
1) Urządzenie specjalizowane:
- regulator wielofunkcyjny
- sterownik PLC
- regulator PID
- przetwornik inteligentny z algorytmem PID
2) Komputer klasy PC (biurowy lub przemysłowy)
- z kartą przemysłową
- z układem akwizycji danych
- z kartą sieciową (PROFIBUS, ETHERNET) i rozproszonym układem
wejść/wyjść.
Konstrukcja regulatora cyfrowego
Podstawowym wymaganiem jest zapewnienie wysokiej niezawodności
działania. Jest to realizowane przez:
Eliminację pamięci dyskowych (zamiast nich pamięci
półprzewodnikowe)
Konstrukcja zapewniająca chłodzenie bez użycia wentylatorów
Stosowanie obudów i wykonań o zwiększonej odporności na
warunki przemysłowe (wibracje, zapylenie, wilgoć itp)
Stosowanie ekranów dotykowych w panelach operatorskich
Stosowanie starszych ale dopracowanych i sprawdzonych rozwiązań
sprzętu i jego elementów
Układy pamięci
1. Pamięć stała (np. EPROM): zawiera dane i oprogramowanie, które
nie powinno być dostępne dla użytkownika (system operacyjny,
biblioteki funkcji standardowych, algorytmy). Rekonfiguracja
możliwa tylko w serwisie.
2. Pamięć zapisywalna (RAM, EEPROM): zawiera dane zmieniane
podczas pracy sterownika oraz definiowane przez użytkownika
(bieżąca konfiguracja, program użytkownika, dane robocze, aktualne
parametry).
RAM – krótki czas dostępu ale wymaga podtrzymywania (bateria lub
kondensator)
EEPROM – długi czas dostępu, ale bez podtrz.
Układ Watch Dog – jest to układ kontrolujący poprawność pracy
procesora. Jeśli odbiera sygnały z procesora to OK, jeśli ich nie dostanie
to interpretuje to jako awarię i wykonuje czynności:
- blokada procesora
-ustawianie wyjść analogowych zgodnie z ustawioną opcją
- zerowanie wyjść binarnych
- blokada komunikacji
- wysyłanie sygnałów o awarii
Wejścia binarne – dokonują zamiany sygnałów logicznych (0,1) na
sygnały możliwe do dalszej interpretacji przez sterownik.
Wejścia analogowe – zamieniają znormalizowane sygnały analogowe z
przetworników pomiarowych na ich reprezentację maszynową. Na
wejścia mogą być podawane sygnały np. prądowe, napięciowe,
rezystancyjne, z czujników temperatury, ciśnienie.
Wejścia są konstruowane jako różnicowe albo jednokońcówkowe. Na
wejściu różnicowym konwertowana jest różnica napięć pomiędzy
wejściem + i -. Na jedno-końcówkowym różnica pomiędzy + a masą.
Wejście różnicowe jest mniej wrażliwe na zakłócenia.
Podstawowe parametry wejść analogowych
1. Rozdzielczość (ang. Resolution) – miara błędu kwantowania,
określonego przez wagę LSB. Jest wyrażana jako waga najmniej
znaczącego bitu
2. Dokładność (ang. Accuracy) – definiowana analogicznie jak klasa
dokładności przyrządów pomiarowych. Jest to wielkość
maksymalnej różnicy pomiędzy wielkością zmierzoną i oczekiwaną.
Jest zależna m.in. od temp. układu.
3. Liniowość (ang. Linearity) – różnica pomiędzy zmierzonymi
zmianami dla dwóch sąsiednich kanałów pomiarowych dokładnie o 1
bit LSB
4. Czas uaktualnienia (ang. Update Rate) – wybranej liczby kanałów –
jest zależny od parametrów sprzętu, czasem może być definiowany.
Wykład dotyczy:
1.Konstrukcja regulatora cyfrowego dokończenie
2.Sterowniki PLC/PAC
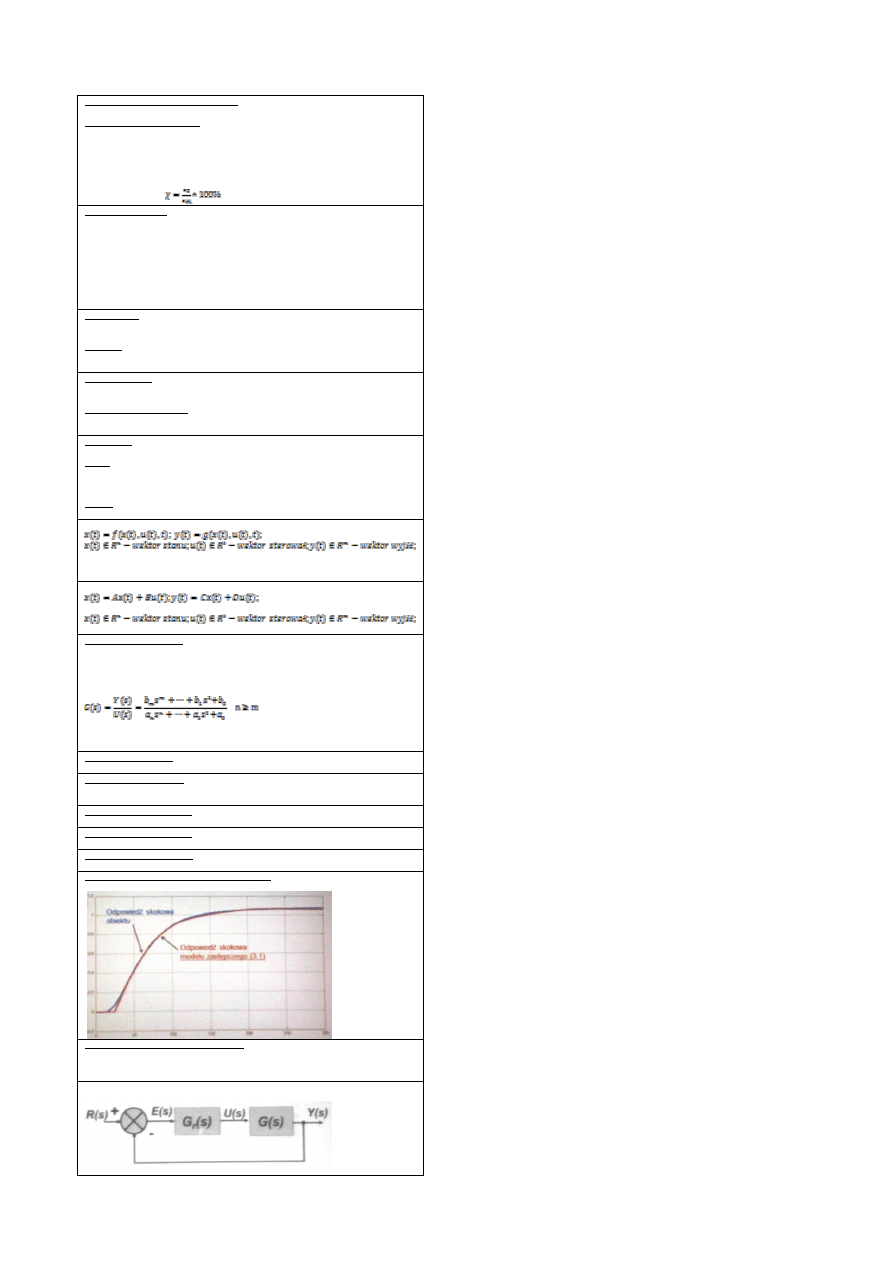
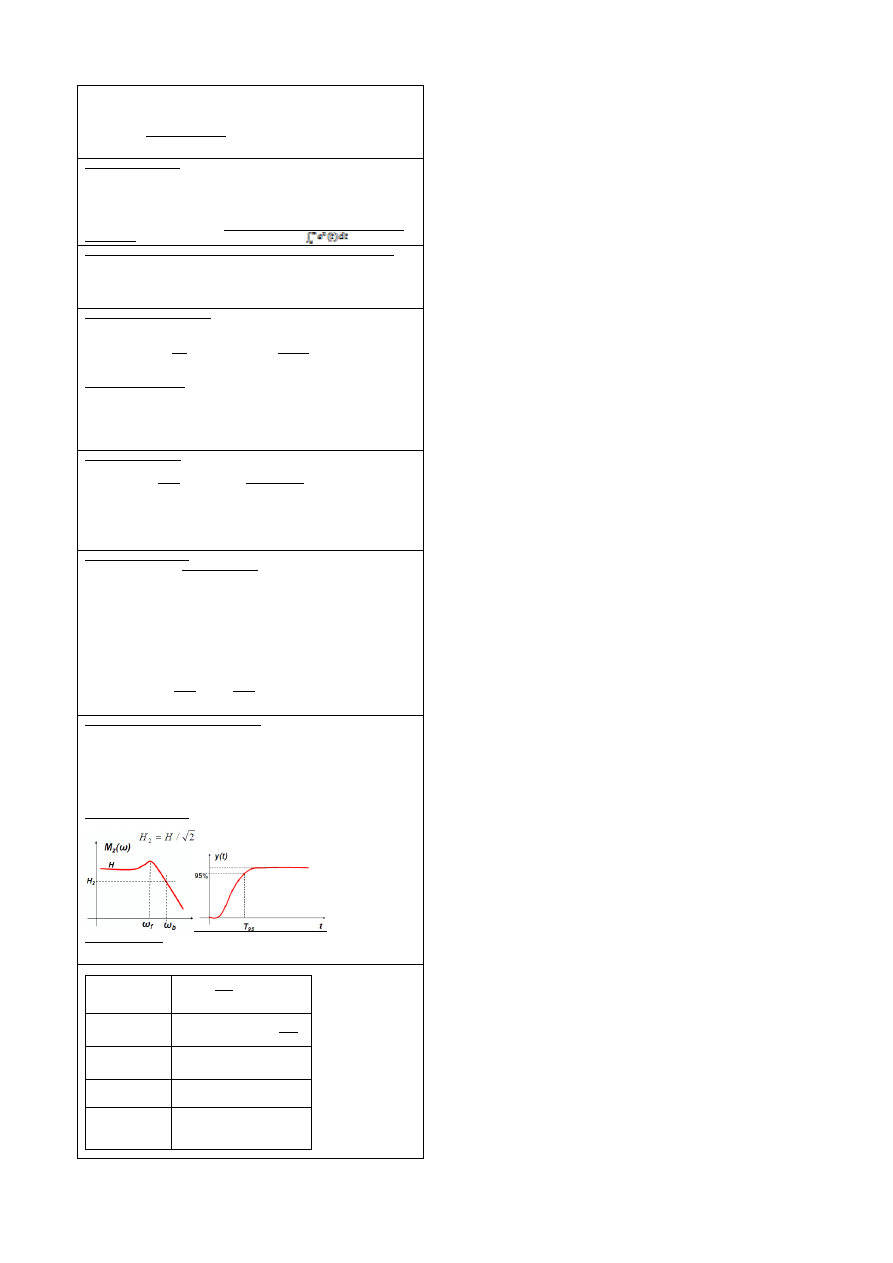
Podstawowe układy konstrukcyjne wejść analogowych:
1/ z jednym przetwornikiem A/C( polewej); Z kiloma
przetwornikami ( po prawej)
W układach wejść analogowych stosowane są następujące
typy przetworników A/C:
-Kompensacyjne – b. szybkie, ale kosztowne i
skomplikowane w obsłudze,
-Integracyjne – ok.. 1000 razy wolniejsze, ale o rząd
wielkości tańsze, niż kompensacyjne,
-Napięcie – częstotliwość,
-Czasem przetwornik A/C jest częścią mikrokontrolera (
zwłaszcza w prostszych rozwiązaniach regulatorów )
Wyjścia binarne
Funkcją wyjść binarnych jest zamiana binarnych sygnałów
wyjściowych z regulatora na sygnały binarne, które mogą
być podane na obiekt ( mogą to być zarówno sygnały
sterujące, jak i np. sygnalizujące stany procesu lub
diagnostyczne).
Są budowane w 3 standardach:
-Wyjścia 24 V DC: „0” 0V, „1” 24V DC,
-Wyjścia 230 V AC: „0” 0V, „1” 230 V AC,
-Wyjścia przekaźnikowe: normalnie zwarte, normalnie
rozwarte i przełączne. Czasem są stosowane wyjścia mocy do
bezpośredniego sterowania obiektem.
W obwodach wyjść binarnych są stosowane układy ochrony
przeciwprzepięciowej ( ze względu na ich współpracę z
przekaźnikami ).
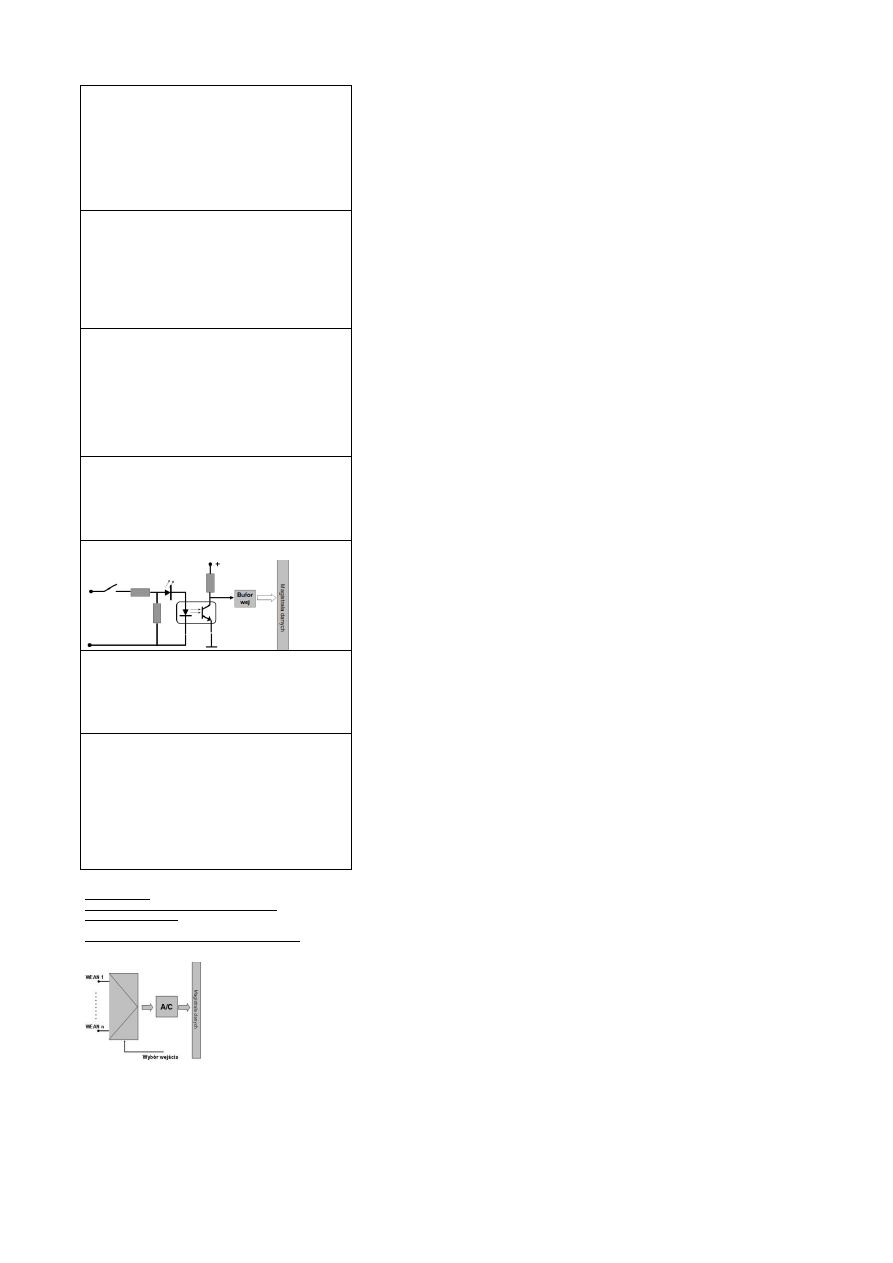
Uproszczony schemat wyjścia binarnego DC: [Ochrona
przeciwprzepięciowa zrealizowana z użyciem diod. ]
Układy zabezpieczeń przeciwprzepięciowych w układach
wyjść 230 V AC:
W wielu przypadkach wyjścia binarne są jedynymi wyjściami
sterownika ( np. w przypadku regulatora PID z wyjściem
PWM ).
Sterowanie PWM może być zastosowane do sterowania
procesów wysokiego rzędu. Typowe przykłady to:
-Regulacja temperatury,
-Sterowanie silnikami elektrycznymi,
-Układ zasilania wtryskowego paliwem w silniku
samochodowym.
Funkcją wyjść analogowych jest zamiana ciągłego sygnału
sterującego wyliczonego przez regulator w postaci
maszynowej ( np. słowo, słowo podwójne ) na jego postać
możliwą do podania na wejście analogowe siłownika lub
innego elementu wykonawczego.
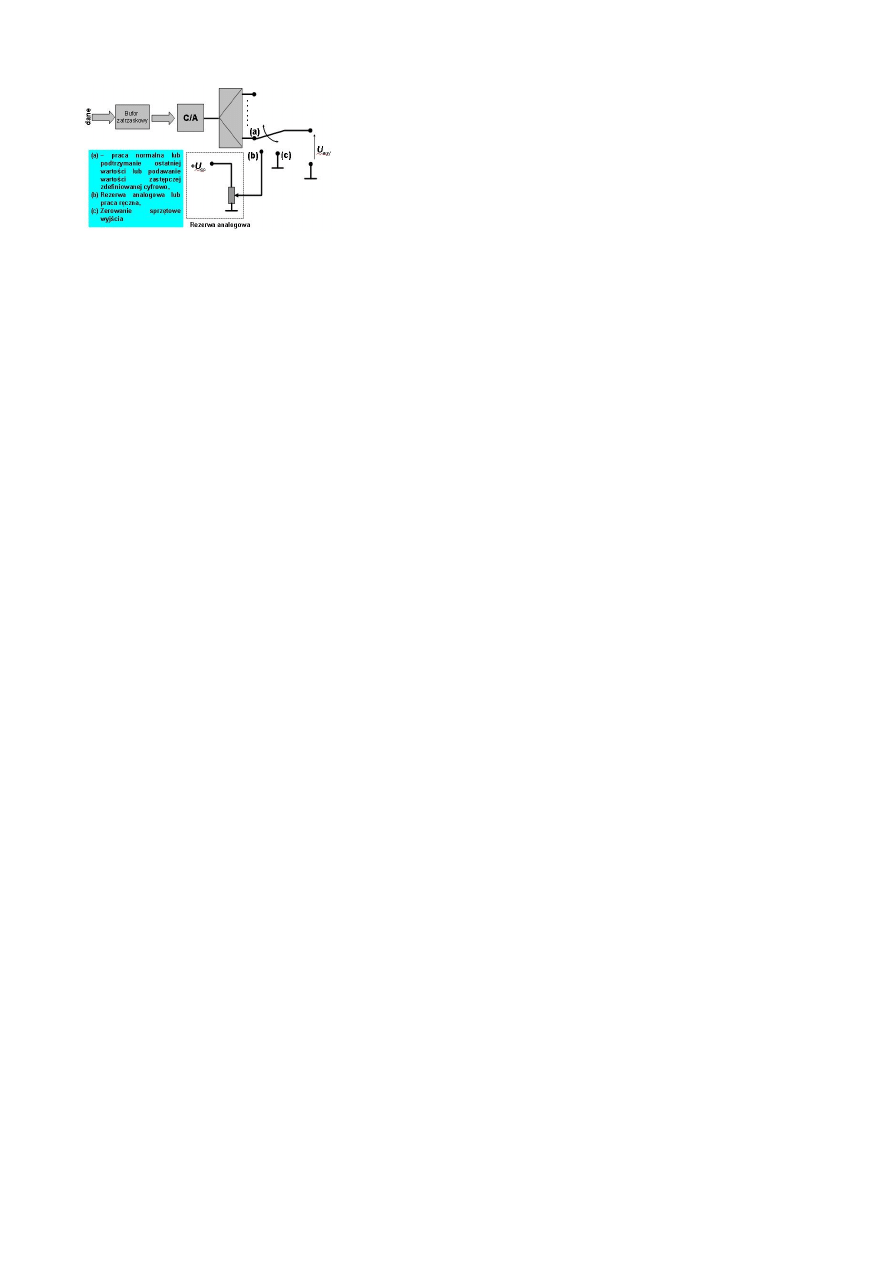
Istotnym problemem jest zdefiniowanie działania wyjścia
w sytuacji STOP- u awaryjnego CPU. Nie zawsze
dopuszczalne jest wyłączenie wyjścia ( ustawienie go na
zero ) . W praktyce stosowane są 3 możliwości:
1.Podtrzymanie ostatniej wartości sygnału sterującego sprzed
awarii,
2.Przełączenie sygnału sterującego na wartość zastępczą,
3.Zerowanie wyjścia ( jeśli jest to dopuszczalne)
Przykład gdzie nie można ustawiać na 0 – piec ze stopionym
metalem/szkłem
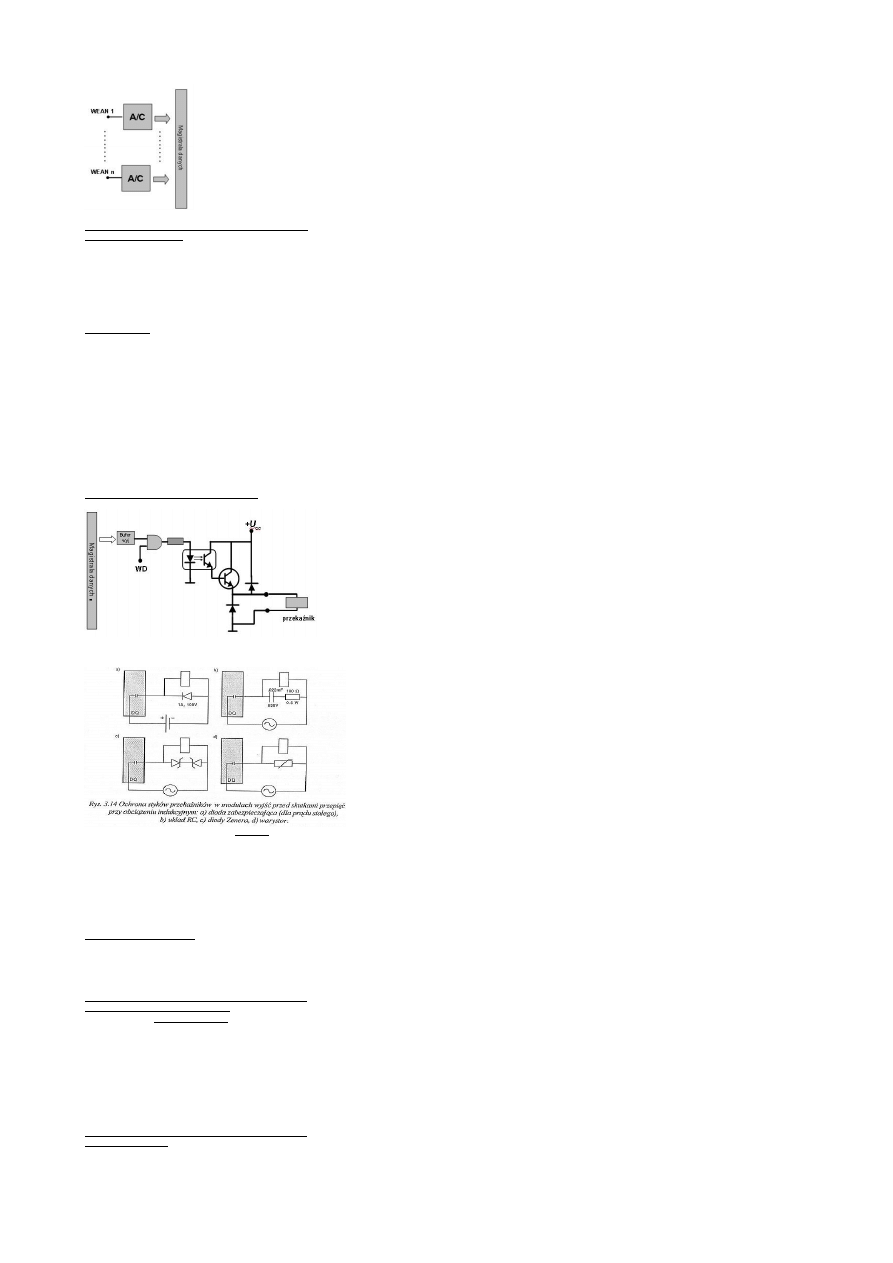
Dodatkowo w układach wyjśc analogowych można stosować
tzw "rezerwę analogową"
Uproszczony schemat wyjścia analogowego napięciowego
z rezerwą analogową:
Wyszukiwarka
Podobne podstrony:
mo all
IO ALL
ZLL ALL
All Flesh Must Be Eaten Two Rotted Thumbs Up
Jim Hall at All About Jazz
all
MO 21 25, AB
MO 1 10, A,B0029
PDH, Broadband ISDN, ATM and all that
MO pytania przykladowe
MO 1 10, A,B0012
MO 1 10, A,B0009
MO 11 15, A,B0009
MO - sprawozdanie 2(1), Politechnika Poznańska, Mechatronika, SEMESTR I, Odlewnictwo
Twarde dyski, Informatyka -all, INFORMATYKA-all
farmacja 12czerwca2007, Receptura, Farma - pytania, testy egzaminacyjne-all
więcej podobnych podstron