1
V. Tranzystory polowe/unipolowe
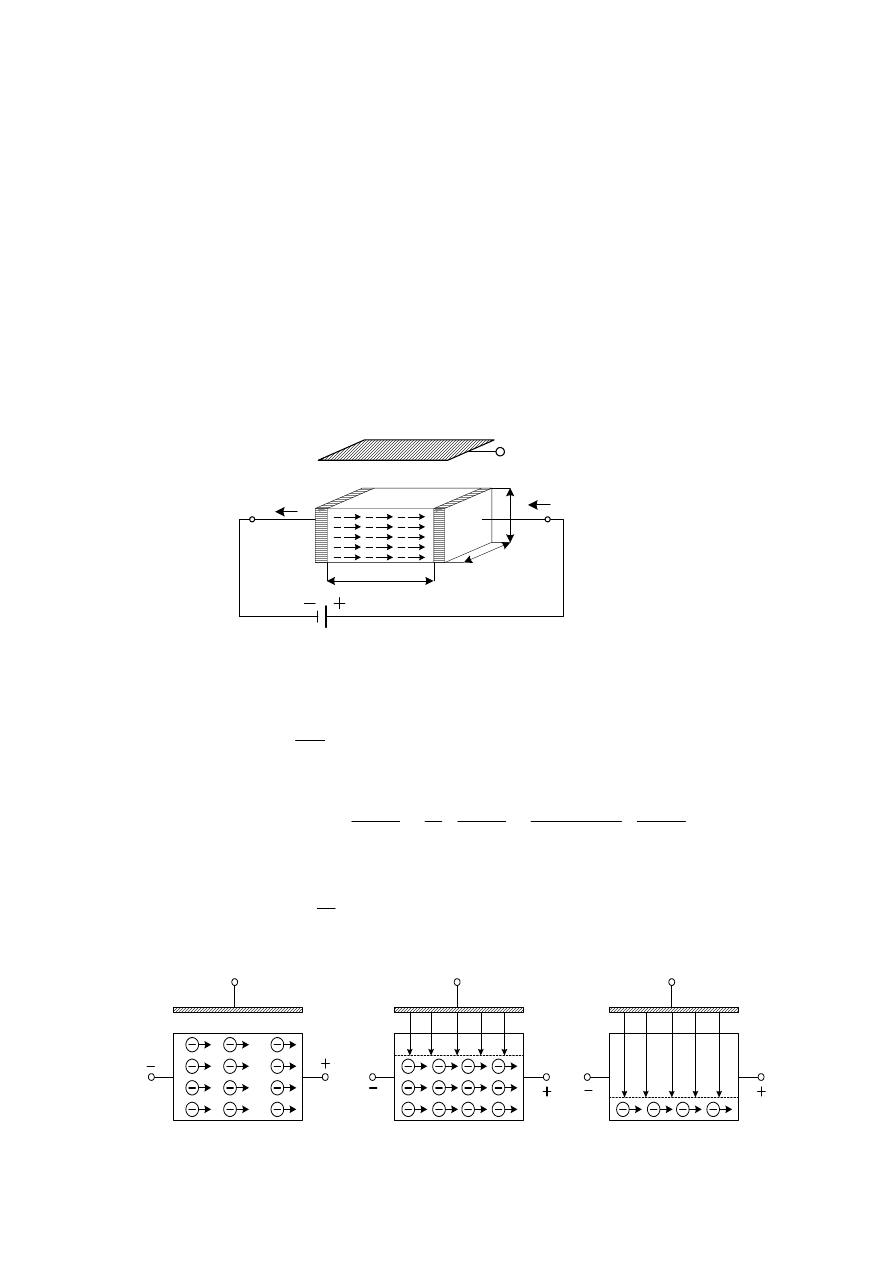
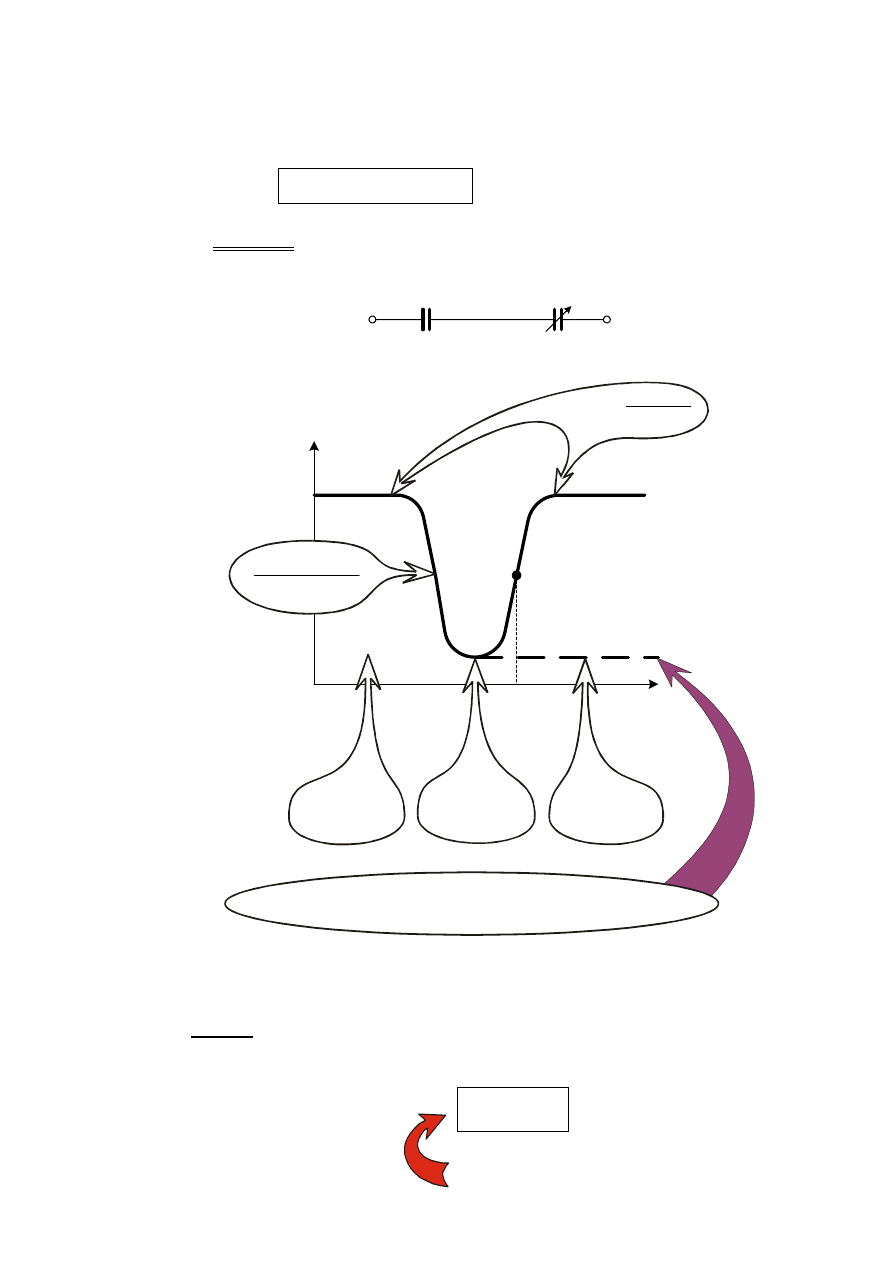
FET – zasada działania
l
S
i
E = U
DS
h
w
kanał typu n
D
i
V
G
„–”
n
n
p
n
>>
n
n
p
n
≈
gate
Rys. 5.1
•
Prąd w obwodzie
o
R
E
i
=
(5.1)
w
h
l
N
q
1
w
h
l
1
w
h
l
R
n
o
⋅
⋅
⋅
µ
⋅
=
⋅
⋅
σ
=
⋅
⋅
ρ
=
(5.2)
stąd
w
1
~
R
o
(5.3)
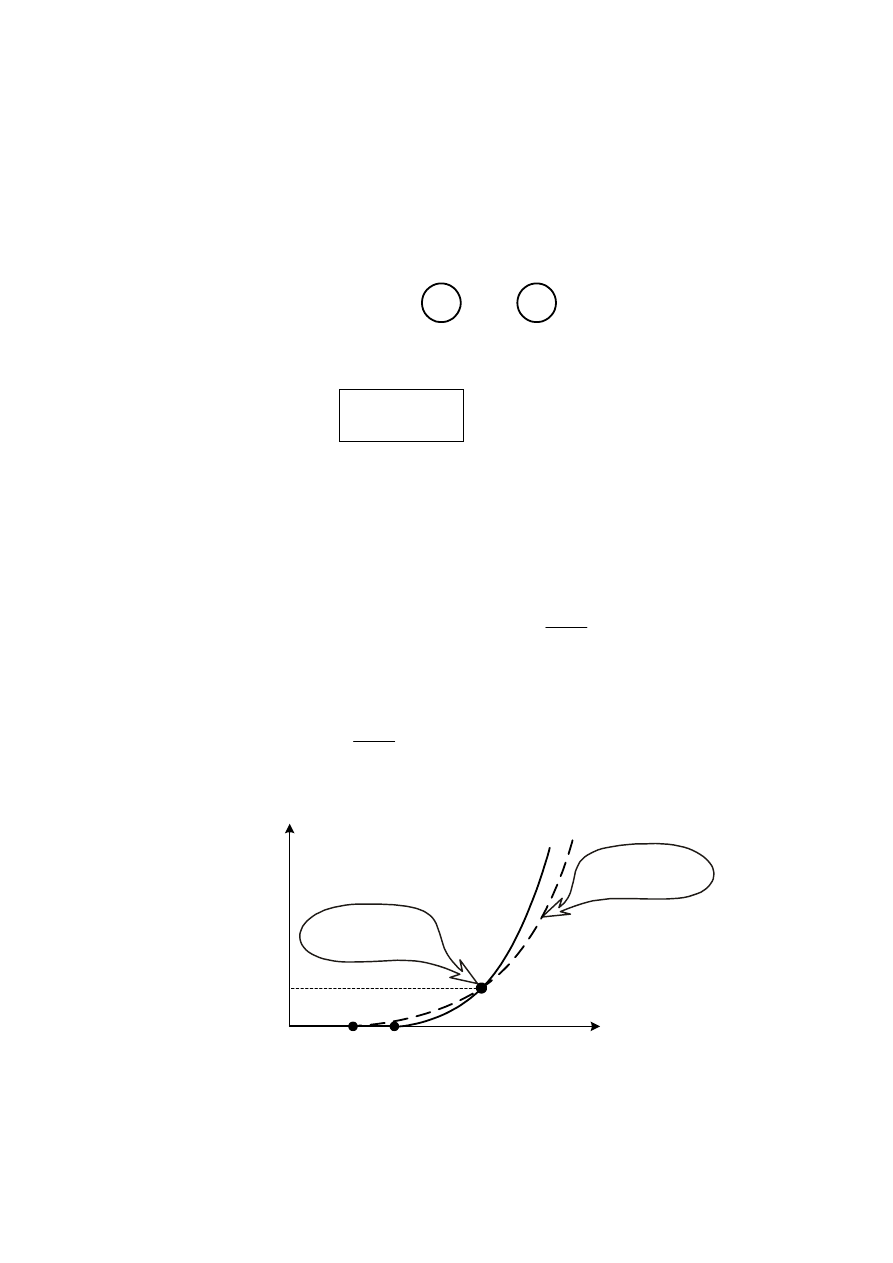
•
S
D
S
D
S
D
V
1
V
G
−
=
0
V
G
=
V
3
V
G
−
=
Rys 5.2
2
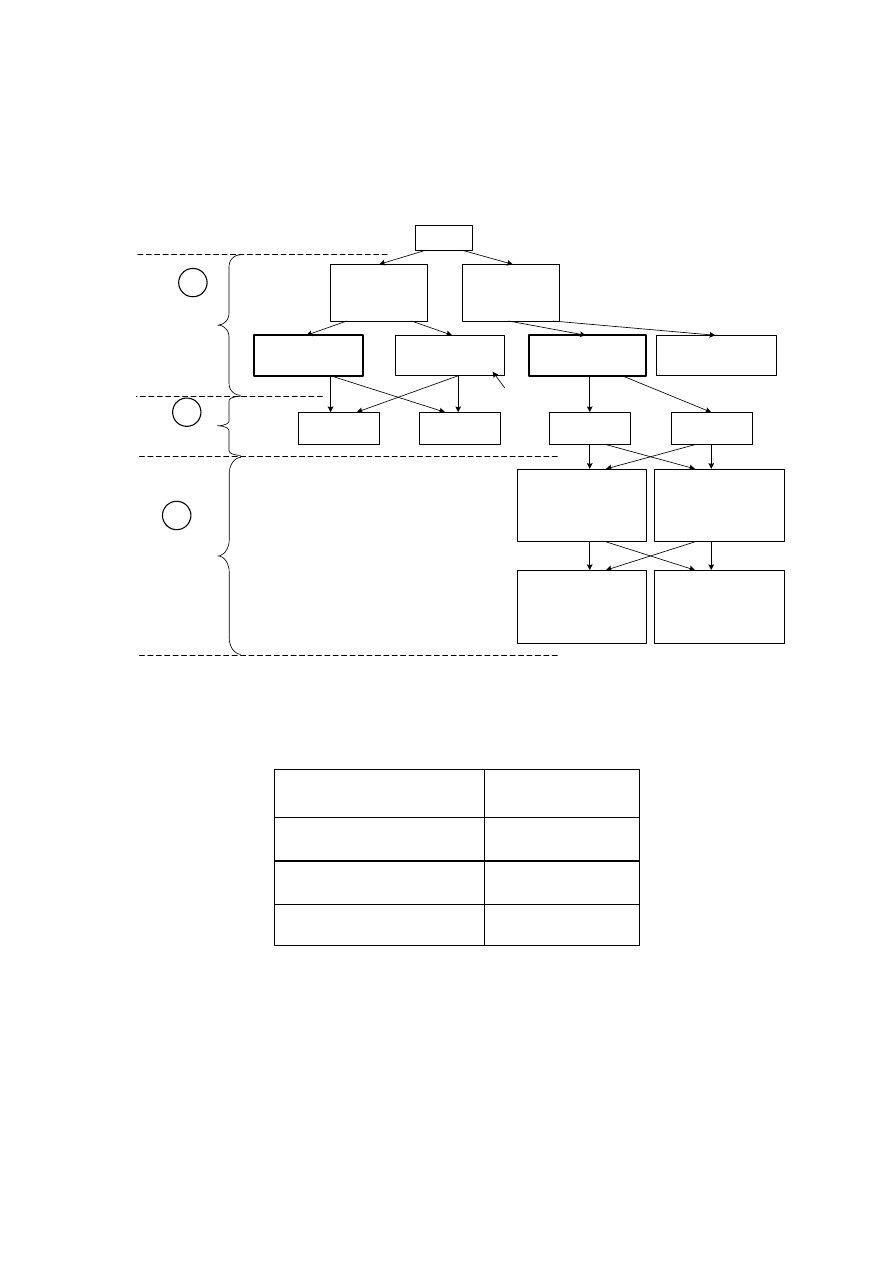
Klasyfikacja
•
Klasyfikacja 3- warstwowa
FET
złącze
JFET
z izolowaną
bramką
IGFET
ze złączem p-n
PNFET
ze złączem m-s
MESFET
MIS, MISFET
MOS, MOSFET
ciekowarstwowy
TFT
GaAs
kanał „n”
kanał „p”
I
II
III
sposób
izolacji
rodzaj
kanału
technologia
kanału
kanał n
kanał p
kanał
zaindukowany
(SCMOS)
kanał
wbudowany
(BCMOS)
praca z kanałem
wzbogacanym
(EMOS)
praca z kanałem
zubożanym
(DMOS)
Rys. 5.3
•
Typ tranzystora a rodzaj izolacji
typ tranzystora
izolacja
MOS, MIS
dielektryk
JFET
złącze p-n
złącze m-s
MESFET
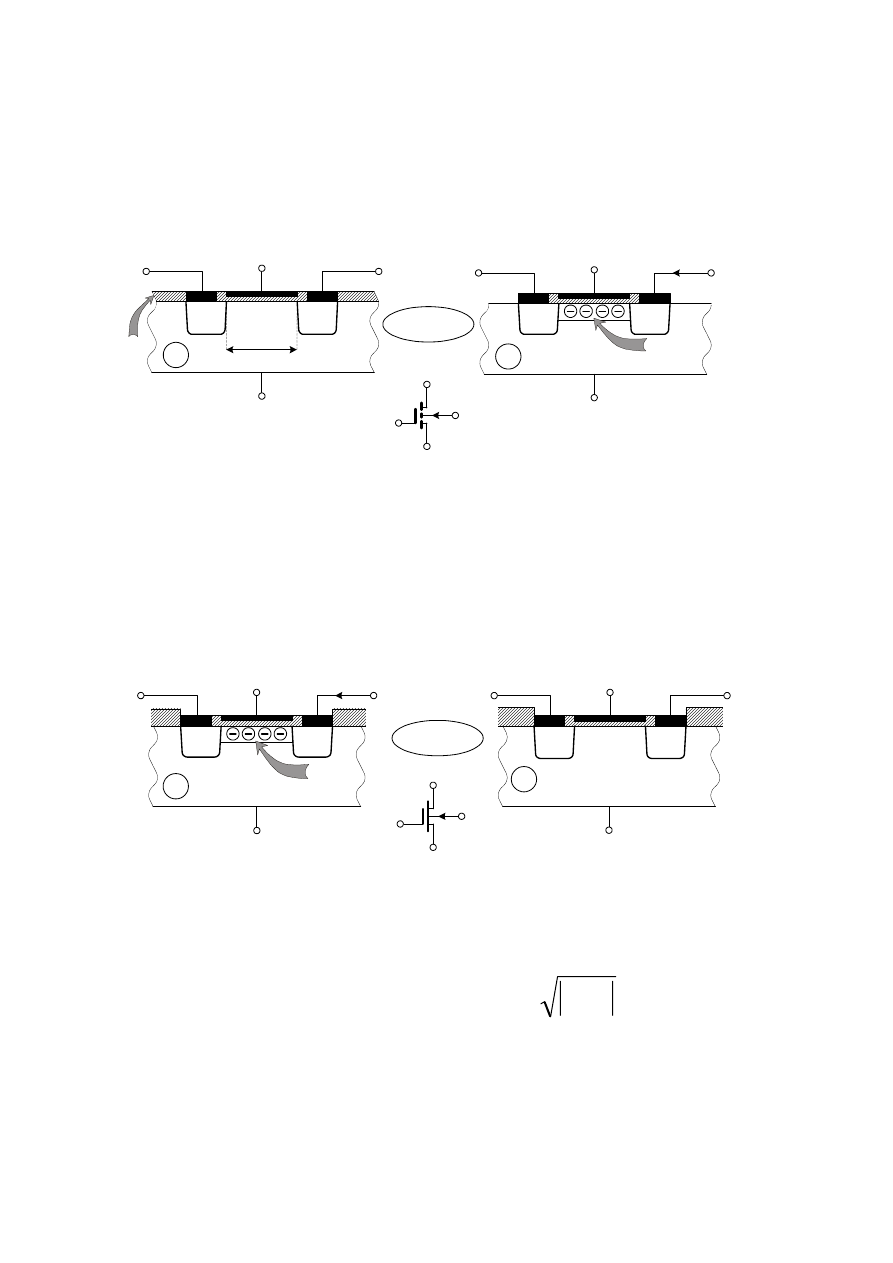
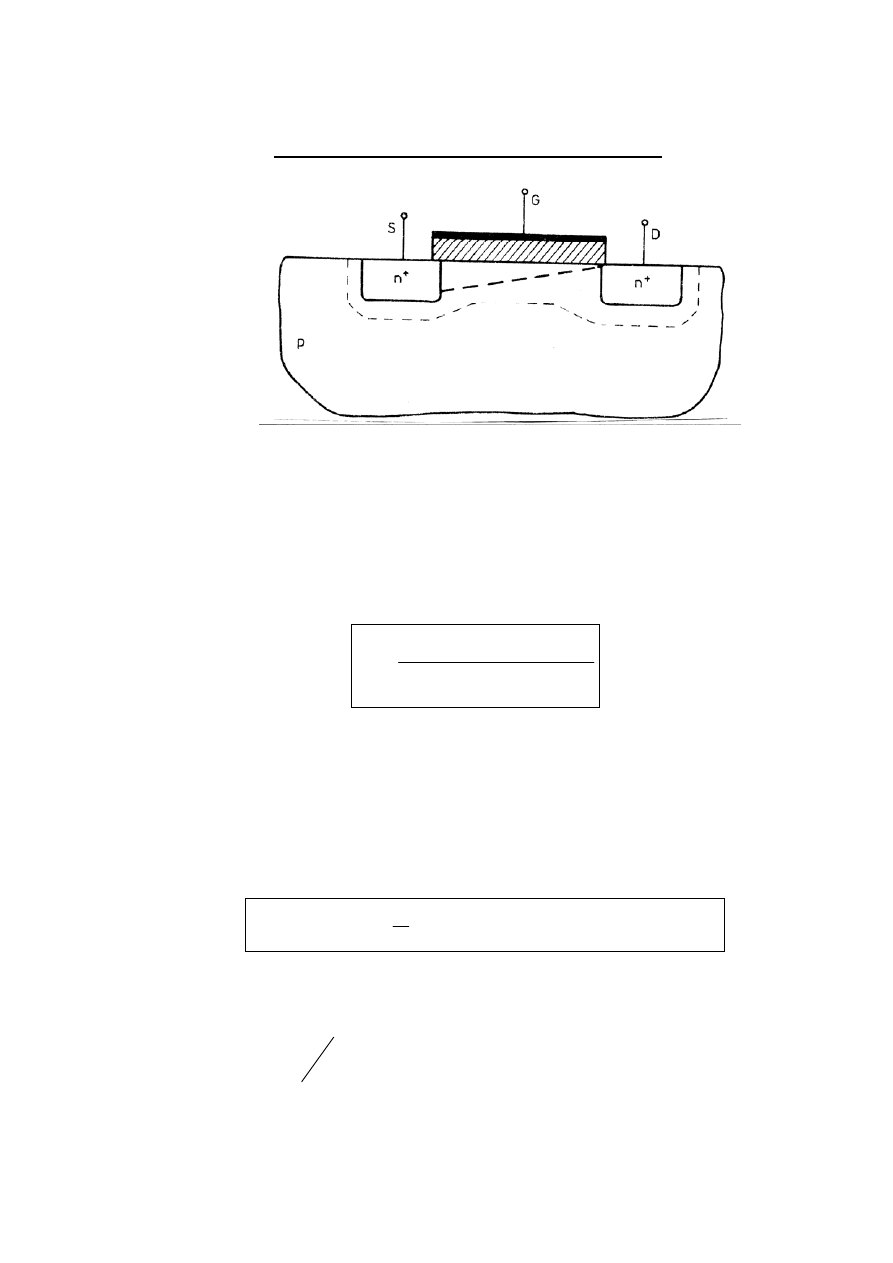
3
MOS
-
kanał indukowany
-
normalnie wyłączony
-
pracujący ze wzbogaceniem
D
S
G V
G
= 0
m
1
L
µ
<
+
n
+
n
p
B
D
S
V
G
> 0
+
n
+
n
p
B
D
i
kanał
(stan inwersji)
EMOS
S
G
D
B
2
0
Si
(substrate)
Rys. 5.4
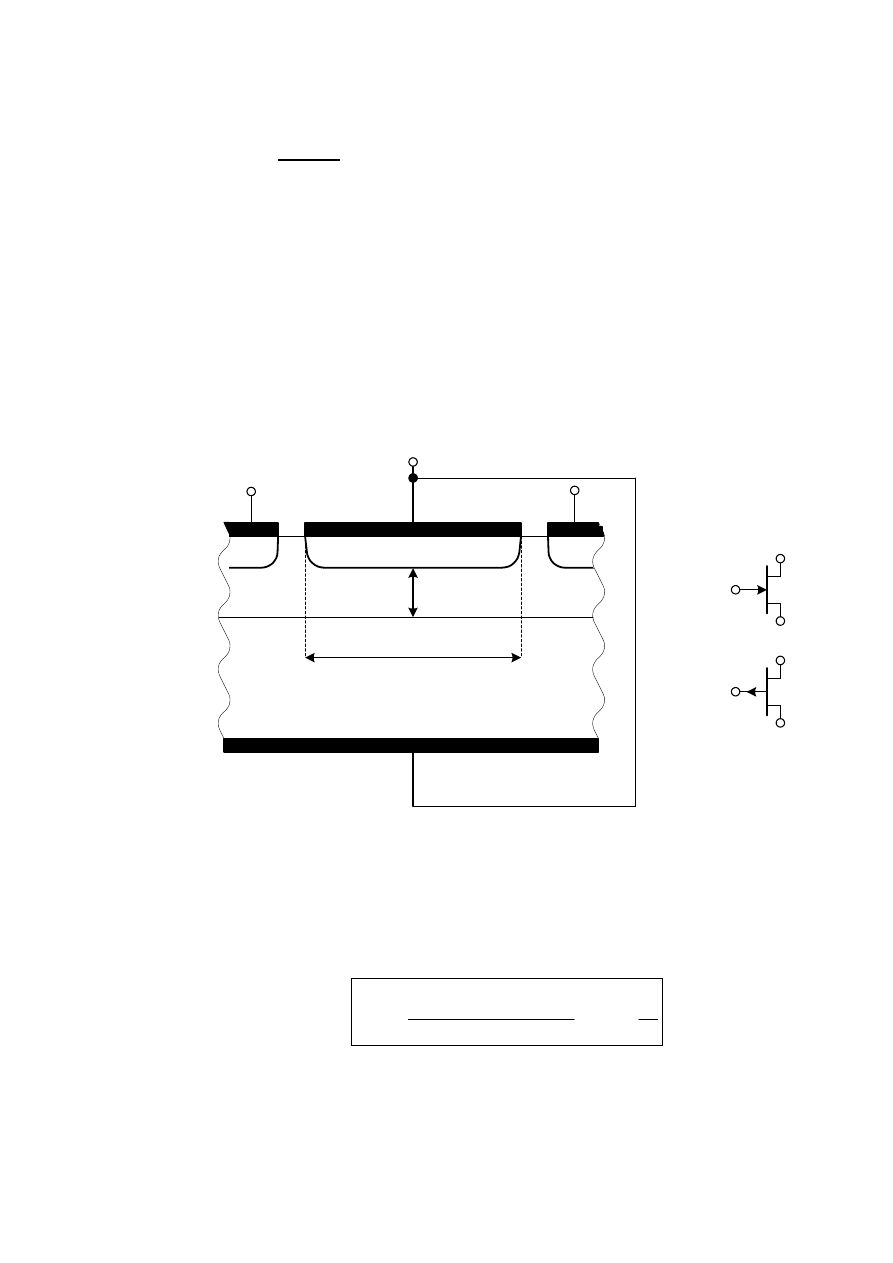
MOS
-
kanał wbudowany
-
normalnie załączony
-
pracujący ze zubożaniem
D
S
G
+
n
+
n
p
B
D
i
kanał
D
S
V
G
< 0
+
n
+
n
p
B
S
B
G
DMOS
D
Rys. 5.5
„Elektryczna” regulacja wartości napięcia
progowego
(
)
( )
BS
p
BS
p
u
A
0
U
u
U
⋅
+
=
(5.4)
6
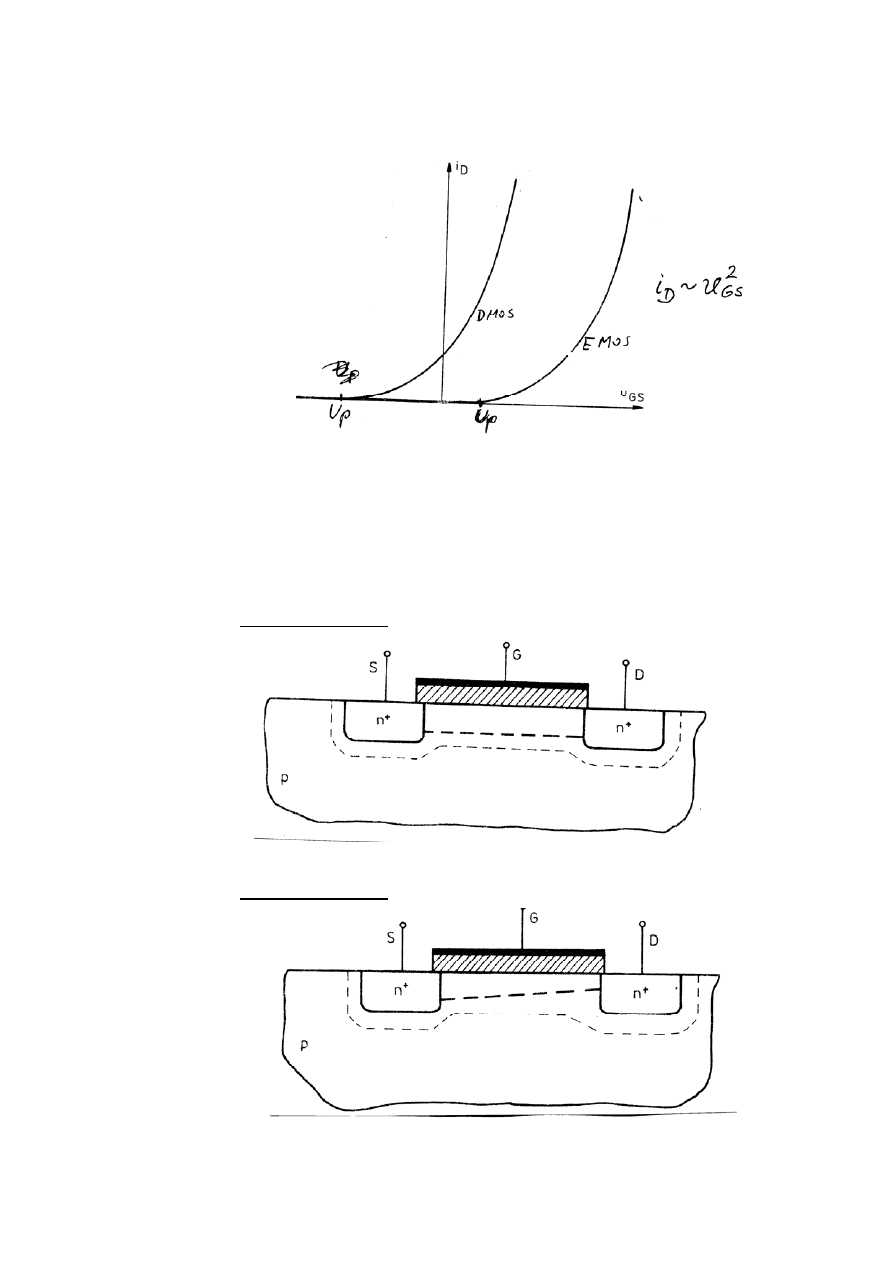
Charakterystyki statyczne idealnego MOS
•
Zakresy pracy i zależności
analityczne
0
i
D
=
zakres odcięcia
p
GS
U
u
<
(5.5)
zakres przewodzenia
p
GS
U
u
≥
zakres pentodowy
zakres triodowy
(nienasycenia)
p
GS
GS
U
u
u
−
<
p
GS
GS
U
u
u
−
≥
(
) (
)
−
−
=
2
u
u
U
u
B
u
,
u
i
2
DS
DS
p
GS
DS
GS
D
(5.6)
(
)
(
)
2
p
GS
GS
D
U
u
2
B
u
i
−
=
(5.7)
•
Parametr materiałowy B
ox
ox
o
o
ox
o
t
L
W
L
C
W
B
⋅
ε
⋅
ε
⋅
⋅
µ
=
⋅
⋅
µ
=
(5.8)
tzn.
L
W
~
B
o
~
B
µ
•
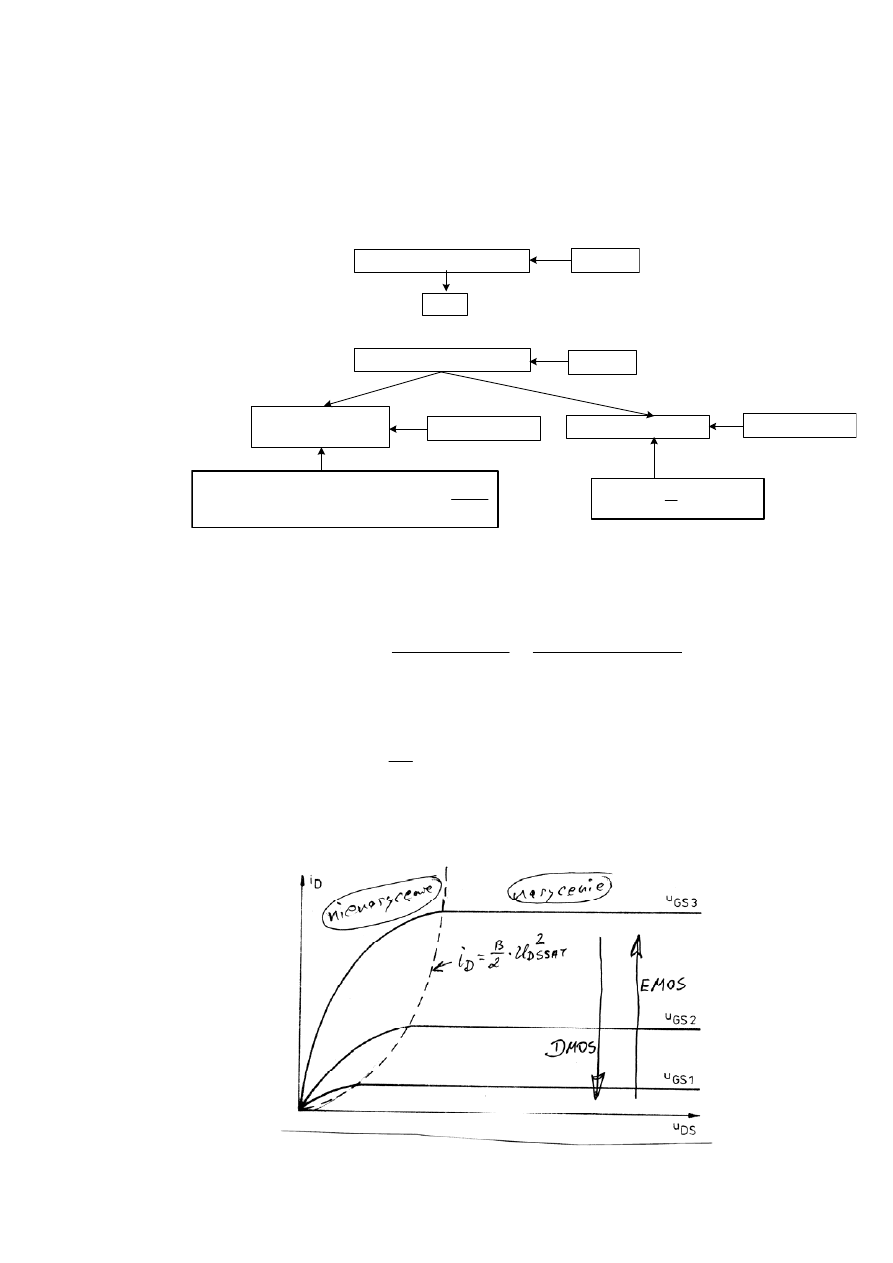
Postać graficzna modelu
Charakterystyki wyjściowe i
D
(u
DS
)
7
Rys. 5.6
Charakterystyki przejściowe
Rys. 5.7
•
Kształt kanału dla różnych zakresów pracy
Zał:
const
u
GS
=
var
u
DS
=
•
Zakres triodowy: małe wartości u
DS
Rys. 5.8a
•
Zakres triodowy: większe wartości u
DS.
Rys. 5.8b
8
•
Granica zakresu triodowego i pentodowego
Rys. 5.8c
Charakterystyki statyczne rzeczywistego
MOS
•
Modulacja ruchliwości nośników
(
)
p
GS
o
U
u
1
−
⋅
Θ
+
µ
=
µ
(5.9)
gdzie:
Θ
- parametr modelu
Stąd modyfikacja parametrem B w którym
0
µ
należy
zastąpić przez
µ
•
Modulacja długości kanału (zakres pentodowy)
(
) (
)
(
)
[
]
DSSAT
DS
2
p
GS
DS
GS
D
u
u
1
U
u
2
B
u
,
u
i
−
γ
+
⋅
−
=
(5.10)
gdzie:
γ
- parametr modelu
γ
1
- sens analogiczny jak napięcie Early’ego w
BJT
9
•
Praca w zakresie podprogowym (odcięcia)
g
D
i
i
=
D
G
S
B
+
n
p
GS
U
u
<
p
GS
U
u
≈
dla
DS
D
u
exp
~
i
składowa dyfuzyjna
!
+
n
•
Przebicie bramka – podłoże (warstwy izolatora Si0
2
)
max
GS
U
– typowo kilkadziesiąt voltów
•
Przebicie lawinowe złącza dren-podłoże
typowo mierzy się
DSO
U
tzn. przy
0
u
GS
=
Rys. 5.9
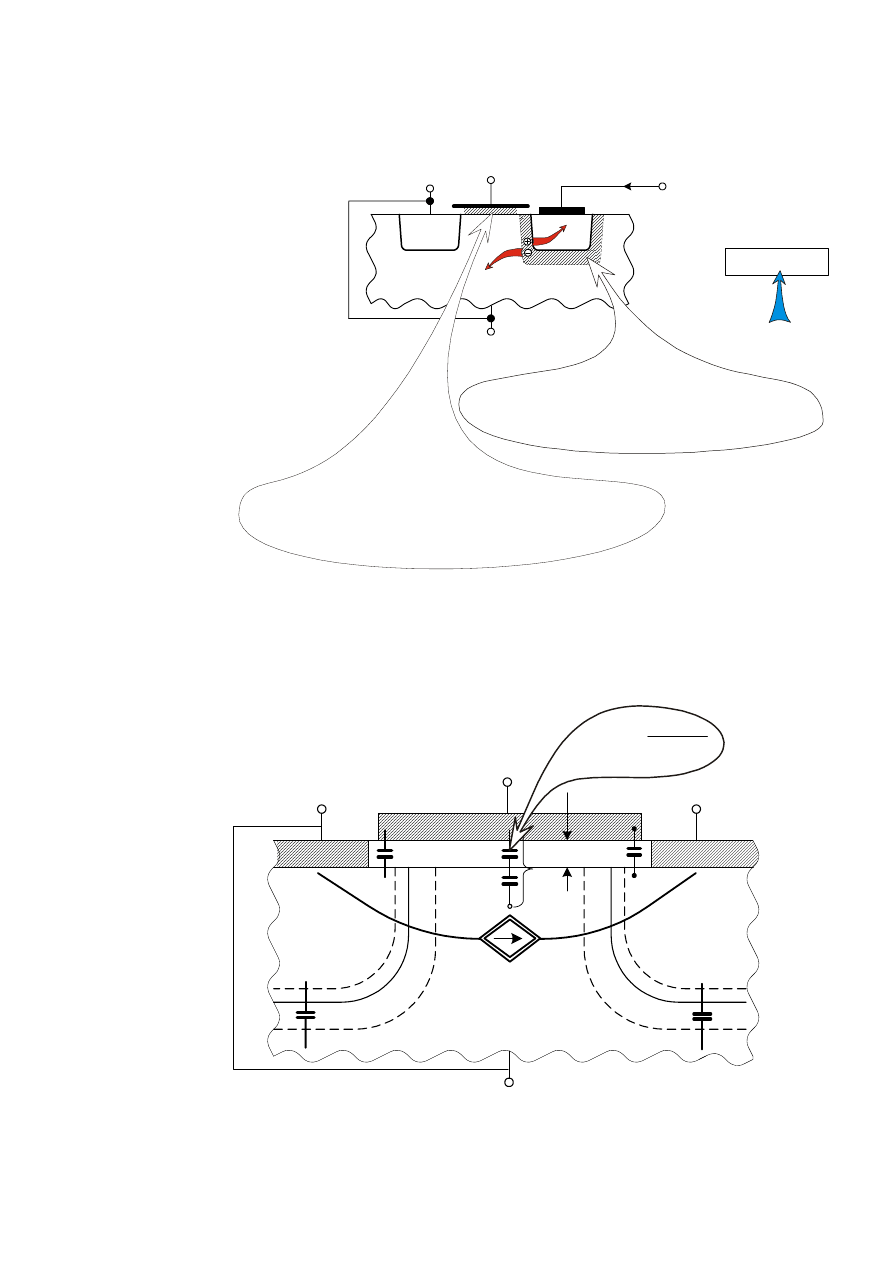
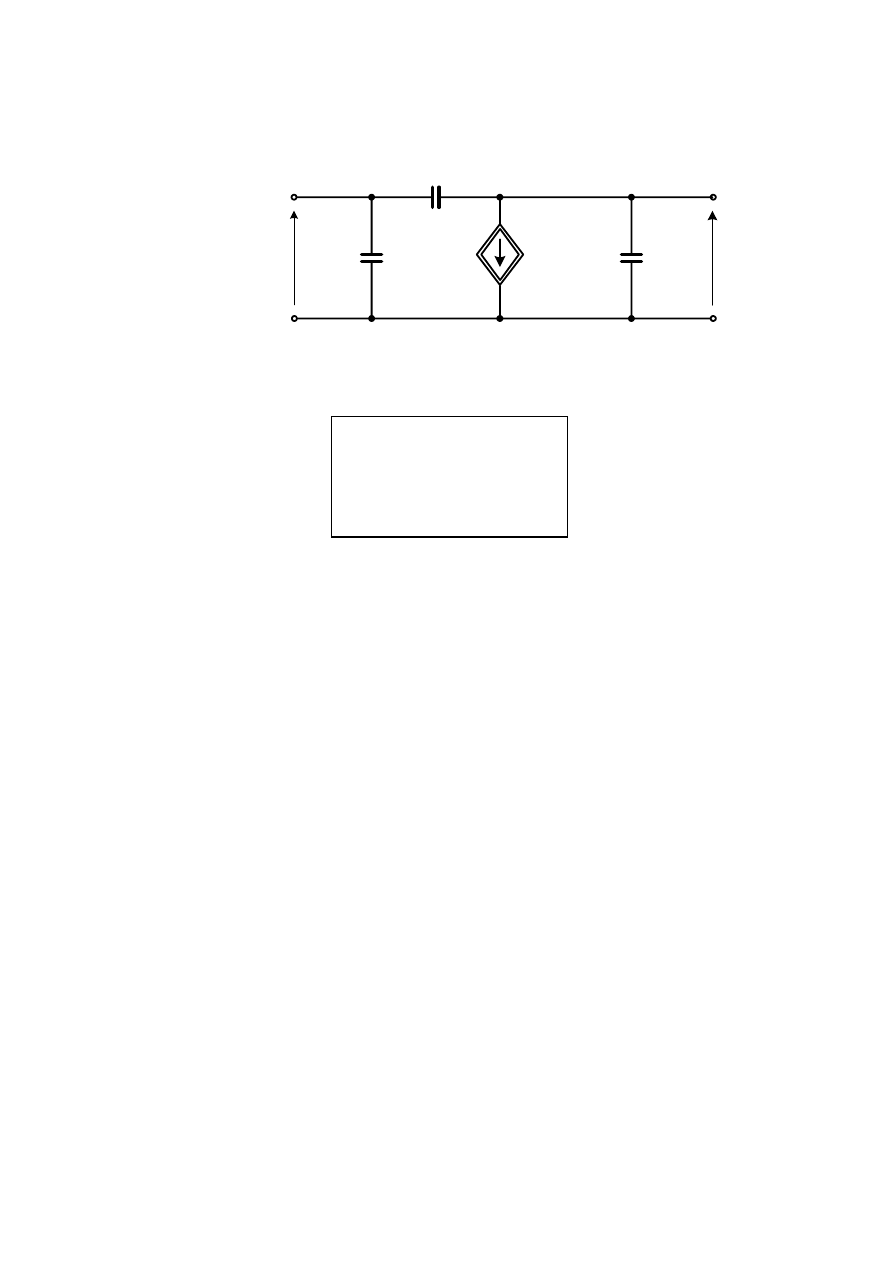
Wielkosygnałowy dynamiczny model MOS
•
Należy uzupełnić model stałoprądowy o pojemności (rys
5.10)
GDE
C
GSE
C
ox
C
( )
u
C
j
G
C
S
D
G
(
)
DS
GS
D
u
,
u
i
ox
t
B
„-”
„+”
SB
C
DB
C
ox
ox
o
ox
t
C
ε
ε
=
Rys. 5.10
8
Trzy grupy pojemności
•
Nieliniowe pojemności złączowe (pasożytnicze)
SB
SB
u
~
C
DB
DB
u
~
C
typowo kilka pF
Typowo „
S
” zwarte z „
B
”
⇒
0
C
SB
→
→
DB
C
pojemność wyjściowa
•
Liniowe pojemności nakładki metalowej elektrody bramki na
obszary źródła i drenu (pasożytnicze)
x
GDE
GSE
t
1
~
C
,
C
szczególnie szkodliwa, jest powodem sprzężenia zwrotnego
między wyjściem (dren) a wejściem (bramka)
!
9
•
Nieliniowa pojemność bramki (rys. 5.10)
(
)
sygn
GB
G
f
,
u
f
C
=
założenie
Rozważamy
nEMOS
(kanał
n
, normalnie OFF)
g
C
ox
C
.
cz
.
m
.
cz
.
w
p
U
G
u
x
ox
o
ox
t
C
ε
⋅
ε
=
stan
akumulacji
stan
zubożenia
stan
inwersji
ox
C
( )
u
C
j
( )
( )
u
C
C
u
C
C
j
ox
j
ox
+
⋅
Dyspersja częstotliwościowa pojemności bramki
Rys. 5.11
Uwaga
Pojemność
ox
C
jest pojemnością użyteczną, gdyż
ox
C
~
B
!

10
ma mieć dużą wartość
11
•
Postać modelu
GS
u
GSE
G
GS
C
C
C
+
=
(
)
DS
GS
D
u
,
u
i
GDE
C
D
S
DB
C
G
DS
u
Rys. 5.12
Typowe
wartości pojemności
pF
30
5
C
G
÷
=
pF
1
C
,
C
GSE
GDE
<
pF
5
2
,
0
C
DB
÷
=
12
Model małosygnałowy MOS (m-cz)
•
Zasada tworzenia – podana wcześniej (rozdz. I)
•
Określa się dla zakresu nasycenia, głównie konfiguracja WS
•
Z modelu stałoprądowego (nasycenie)
(
)
2
p
GS
D
U
u
2
B
i
−
=
Można napisać dla małych amplitud
gs
m
d
U
g
I
⋅
=
(5.11)
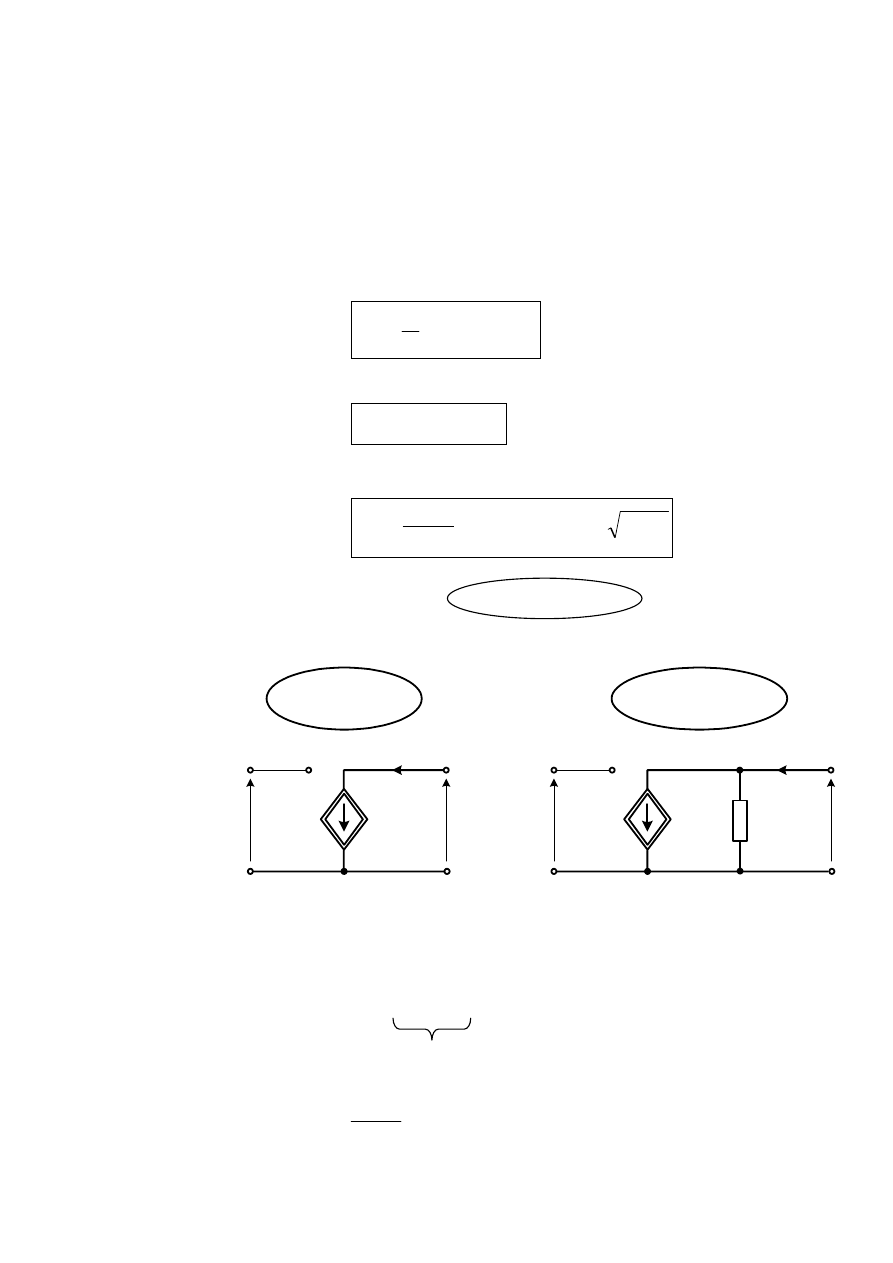
•
Transkonduktancja
m
g
(
)
D
p
GS
GS
D
m
Bi
2
U
u
B
du
di
g
=
−
=
=
(5.12)
typowo
mS
1
3
.
0
g
m
÷
=
•
Schematy zastępcze
gs
U
gs
m
U
g
⋅
ds
U
G
D
d
I
S
MOS idealny
gs
U
gs
m
U
g
⋅
ds
U
G
D
d
I
S
MOS rzeczywisty
ds
r
Rys. 5.13
Dla rzeczywistego MOS
ds
ds
gs
m
d
U
g
U
g
I
⋅
+
⋅
=
(5.13)
MOS idealny
gdzie
D
DS
D
ds
i
du
di
g
⋅
γ
=
=
(5.14)
Nachylenie ch-ki
wyjściowej (wzór 5.10)
13
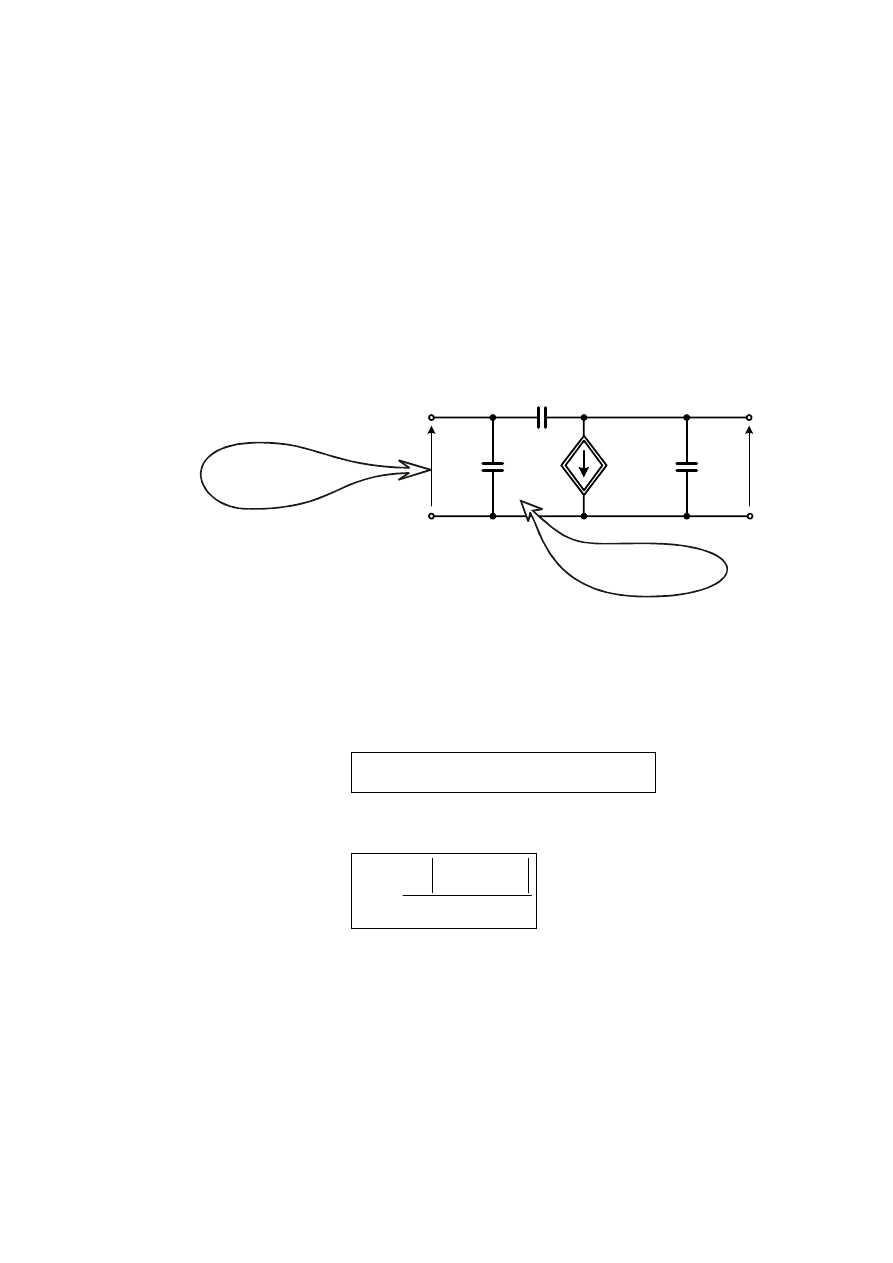
Model małosygnałowy MOS (m.cz.)
•
Małosygnałowy model m.cz. należy uzupełnić o
pojemności:
Æ
pojemność bramki –
g
C
Æ
pojemność warstwy opróżnionej dren-podłoże –
db
C
Æ
pojemności pasożytnicze wynikające z nakładki
powierzchni bramki nad źródło i dren –
gde
,
gse
C
C
•
Schemat zastępczy
gs
U
gs
m
U
g
⋅
ds
U
gde
C
db
C
gs
C
widać tylko
pojemność
!
g
gse
gs
C
C
C
+
=
•
Właściwości częstotliwościowe
Częstotliwość charakterystyczna
=
m
f
częstotliwość przy
której moduł amplitudy prądu wejściowego o charakterze
pojemnościowym jest równy modułowi amplitudy prądu źródła
sterowanego w obwodzie wyjściowym, tj.
gs
m
gs
gs
m
U
g
U
C
f
2
⋅
=
⋅
⋅
⋅
π
(5.15)
Po podstawieniu odpowiednich zależności i przekształceniach,
dla dowolnego typu przewodnictwa w kanale otrzymujemy
2
p
GS
m
L
2
U
u
f
⋅
π
−
⋅
µ
=
(5.16)
gdzie:
L
– długość kanału
•
Wniosek:
C
zęstotliwość charakterystyczna jest większa dla
nMOS-ów
w porównaniu z
pMOS-ami
, ze względu
na około trzykrotnie większą wartość ruchliwości
elektronów w porównaniu z dziurami. Także istotny
def
.
Rys. 5.14
14
jest wpływ długości kanału – im krótszy kanał, tym
większa
m
f
.
MOS – wpływ temperatury
•
Temperatura wpływa na parametry
B
p
U
oraz
•
Zależność B(T) wynika z zależności
( )
T
µ
, stąd
κ
−
T
~
B
(5.17)
tutaj
1
≈
κ
(wpływ międzypowierzchni na mechanizm
rozpraszania nośników)
•
Napięcie progowe zależy liniowo od temperatury
( )
( )
∆
⋅
+
⋅
=
T
dT
dU
1
T
U
T
U
p
0
p
p
(5.18)
gdzie
wartość współczynnika termicznego
K
/
mV
kilka
dT
dU
p
−
=
•
Wpływ temperatury na statyczną charakterystykę
(
)
GS
D
u
i
1
T
2
T
>
.
komp
I
D
1
T
2
T
2
p
U
1
p
U
D
i
GS
u
korzystne
!
TÊ to i
D
Ì
punkt
autokompens.
Rys. 5.15
15
Uwaga
!
punkt
autokompensacji
!
JFET
Budowa
•
Elektroda bramki
JFET’a
jest oddzielona od kanału za pomocą
zaporowo spolaryzowanego złącza
p-n
.
•
Szkic przekroju
JFET
z kanałem
n
oraz symbole
Rys. 5.16
•
Przy braku polaryzacji kanał jest przewodzący
•
Konduktywność kanału otwartego
(
)
0
u
GS
=
L
w
~
L
W
N
q
a
2
G
n
D
n
0
⋅
µ
µ
=
(5.19)
gdzie:
D
N
- koncentracja domieszki donorowej w kanale
n
µ
- ruchliwość elektronów
w
- szerokość kanału
+
n
+
n
+
p
L
a
2
n
+
p
S
G
D
S
G
D
„n”
S
G
D
„p”
(dolna bramka)
16
Stąd dla małej wartości
0
u
DS
→
DS
0
D
u
G
i
⋅
=
(5.20)
Charakterystyki statyczne
•
Podział na zakresy pracy i wzory opisujące podstawowe
charakterystyki
JFET
są w przybliżeniu takie jak dla
MOS
•
Charakterystyki przejściowe w zakresie nasycenia
(
)
(
)
2
p
GS
2
p
GS
DSS
GS
D
U
u
2
B
U
u
1
I
u
i
−
=
−
=
(5.21)
DSS
I
- nowy parametr (o innym wymiarze
!
)
=
DSS
I
prąd drenu płynący przy
0
u
GS
=
p
0
DSS
U
B
G
2
1
I
⋅
⋅
⋅
−
=
gdzie:
0
G
- konduktancja otwartego kanału
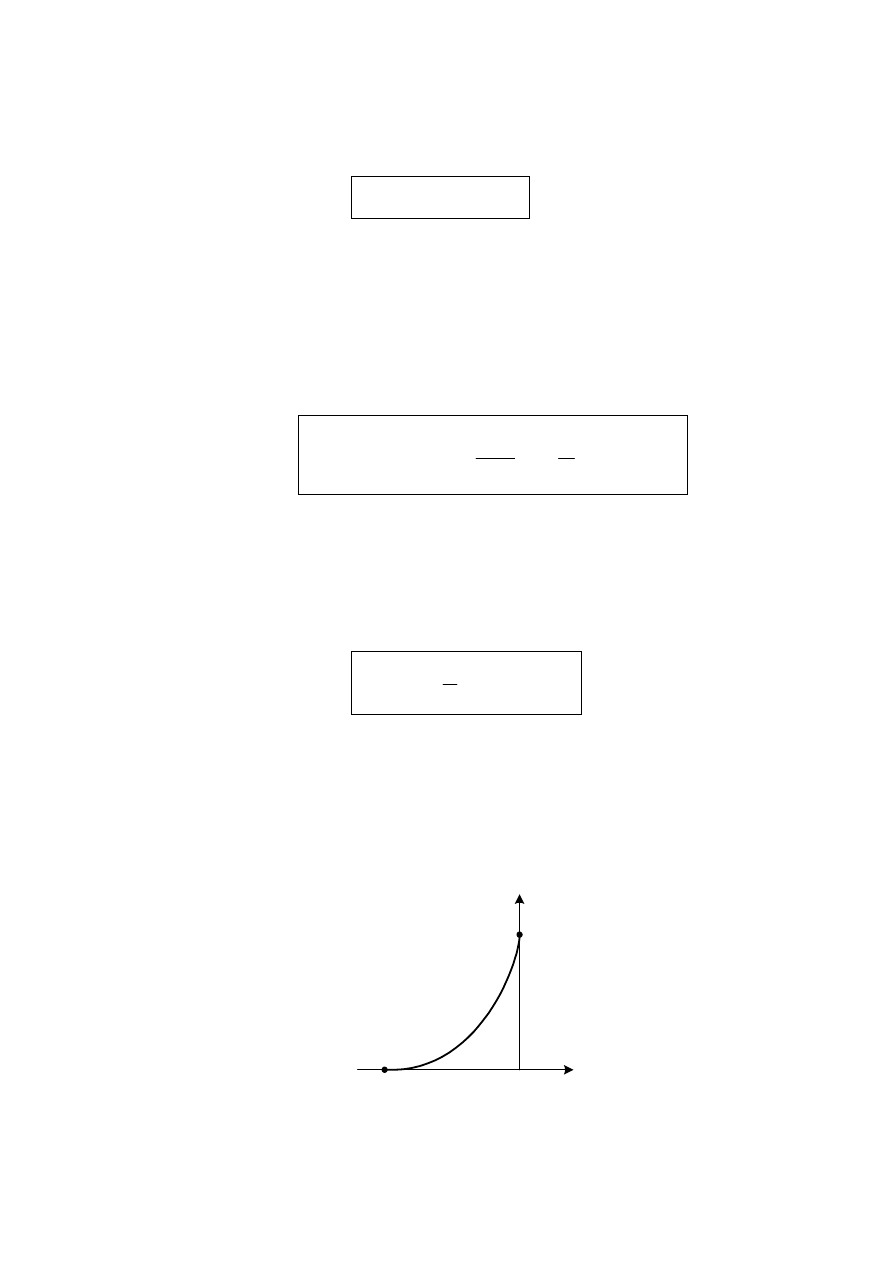
•
Typowa zależność
(
)
GS
D
u
i
pokazano na rys. 5.17
D
i
GS
u
p
U
−
DSS
I
Rys. 5.17
def.
17
•
Napięcie progowe
0
D
2
p
2
N
a
q
U
ε
⋅
ε
⋅
⋅
−
=
(5.21)
gdzie
a oznacza połowę szerokości kanału (mierzoną w głąb
struktury).
•
Charakterystyki wejściowe
Są inne niż dla tranzystorów
MOS. Charakterystyki
(
)
GS
G
u
i
JFET są analogiczne jak dla złącza p-n spolaryzowanego
zaporowo (prąd generacyjny) stąd
przebicie bramki JFET’a
⇒
przebicie lawinowe złącza p-n
typowo
→
G
i
rzędu nA
Inne uwagi
•
w
JFET’ach występuje efekt modulacji długości kanału
•
w
JFET’ach nie występuje efekt modulacji ruchliwości
nośników
•
model małosygnałowy ma postać identyczną jak dla tranzystora
MOS
!

18
Porównanie właściwości tranzystorów
bipolarnych i polowych
•
W tranzystorach polowych prąd związany jest z ruchem nośników
większościowych, natomiast w tranzystorach bipolarnych główną rolę w
przepływie prądu odgrywają nośniki mniejszościowe wprowadzone z
emitera do bazy i transportowane przez bazę do złącza kolektorowego.
•
Dla tej samej wartości prądu polaryzującego transkonduktancja (bo do niej
jest proporcjonalnie wzmocnienie napięciowe stopnia wzmacniającego na
pojedynczym tranzystorze) tranzystora bipolarnego jest do kilkuset razy
większa niż tranzystora polowego.
•
Rezystancja wejściowa tranzystorów polowych jest pięć do sześciu
rzędów większe niż dla tranzystorów bipolarnych.
•
Przeciętnie tranzystory bipolarne mają częstotliwości graniczne większe
niż przeciętne tranzystory polowe.
•
Istotne znaczenie ma zakres napięć, w których tranzystor jest elementem
aktywnym. Minimalnie napięcie na wyjściu tranzystora bipolarnego, przy
którym przechodzi on w obszar nasycenia wynosi od 100 do 200 mV. Dla
tranzystorów polowych przejście w obszar triodowy zachodzi dla napięć
rzędu kilku voltów.
Maksymalne napięcie wyjściowe związane jest ze zjawiskami przebicia i jest większe w tranzystorach bipolarnych.
Reasumując: w tranzystorach bipolarnych użyteczny zakres napięć
odpowiadający pracy w obszarze aktywnym jest zdecydowanie większy.
•
Tranzystory polowe wnoszą mniejsze zniekształcenia sygnałów
harmonicznych. Dotyczy to głównie zniekształcenia trzeciego rzędu, gdyż
charakterystyki tranzystorów polowych są bardzo zbliżone do zależności
kwadratowej.
•
Przełącznik typu
CMOS zapewnia znacznie mniejszy pobór mocy w
stanach ustalonych aniżeli przełącznik na tranzystorze bipolarnym.
Natomiast szybkość działania przełącznika bipolarnego jest nieco większa
niż przełącznika polowego.
19
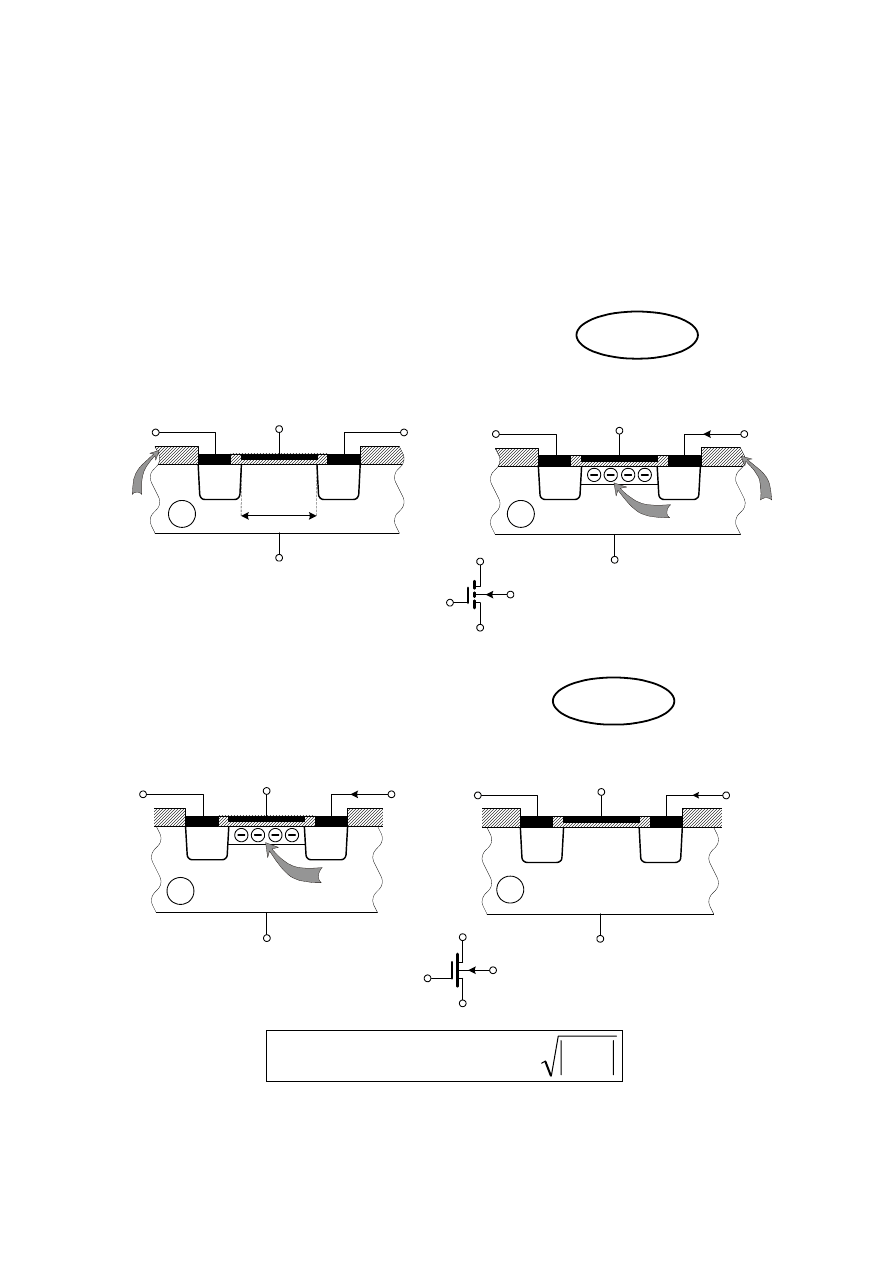
MOSFET
Rozważa się tranzystory z kanałem n (n-MOS)
tzn. podłoże jest typu p
MOS -
kanał indukowany
-
normalnie wyłączony
-
pracujący ze wzbogacaniem
D
S
G V
G
= 0
m
1
L
µ
<
+
n
+
n
p
B
D
S
V
G
> 0
+
n
+
n
p
B
D
i
kanał
(stan inwersji)
2
0
Si
(substrate)
2
0
Si
S
G
D
B
symbol
MOS -
kanał wbudowany
-
normalnie załączony
-
pracujący ze zubożaniem
D
S
G
+
n
+
n
p
B
D
i
kanał
D
S
V
G
< 0
+
n
+
n
p
B
S
B
G
D
symbol
D
i
(
)
( )
BS
p
BS
p
u
A
0
U
u
U
⋅
+
=
(5.4)
Taka sytuacja ma miejsce w układach scalonych
EMOS
DMOS
Rys. 5.4
Rys. 5.5
!

20
Wyszukiwarka
Podobne podstrony:
odejmowanie do 10 5
BIAŁKA DO 10, Studia, 1-stopień, inżynierka, Ochrona Środowiska, Od Agaty
Akumulator do JCB?strac?strac
dodawanie do 10 4
dodawanie do 10 4 id 138940 Nieznany
5 Tranzystory polowe
Liczby od 1 do 10 kolorowanka (eng)
odejmowanie do 10 14
ROK V pytania do lektury ST
RACHUNKOWO BANKOWA 10 ST, Inne
ELEKTORNIKA TRANZYSTORY POLOWE
TRANZYSTORY POLOWE
dodawanie do 10 3 id 138939 Nieznany
dodawanie do 10 11
więcej podobnych podstron