
Zawartość
Opisać zasady transferu danych w systemach DSP wykorzystujących generatory adresu DAG. ... 13
Przedstawić strukturę rejestrów roboczych systemów DSP na przykładzie procesora rodziny
Omówić zasady obsługi przetworników obrotowo-impulsowych w systemie
cesorowym.Zaproponować rozdział zadań pomiędzy sprzęt i oprogramowanie. ................. 16
Narysować schemat blokowy układu do pomiaru okresu Tx sygnału napięciowego przy
................................................................................. 17
Omówić zasady dołączania peryferyjnych urządzeń elektronicznych do mikroprocesorów –

Omówić zasady obsługi przetwornika kąta obrotu z wyjściem równoległym w systemie
Omówić system obsługi przerwań w mikroprocesorach rodziny MCS51. Źródła przerwań,
Na podstawie schematu blokowego przedstaw strukturę inteligentnego czujnika pomiarowego
w/g IEEE 1451. Jakie elementy s
kładowe zawiera cyfrowy komunikat reprezentujący wyjściowy
Podać przykład budowy algorytmu przetwarzania numerycznego obsługującego wielokanałowy
Omówić algorytmy konwersji wyniku binarnego przetwarzania a/c do postaci
Opisać metody przetwarzania wielokanałowego w modułowych systemach
Charakterystyka oprogramowania narzędziowego mikroprocesorowych systemów pomiarowych.
W jaki sposób rozdzielczość przetwornika A/C wpływa na wartość szumu kwantyzacji
Scharakteryzuj zasadę pomiaru temperatury przy pomocy czujnika termistorowego w układzie
układ sterowania silnika prądu stałego metodą impulsową w układzie H z
Przedstawić procedury numerycznych konwersji binarnego wyniku przetwarzania A/C
temperatury czujnika, wiedząc, że UREF=2.5V a stałe czujnika temperatury U(25 C)=600mV,
C, a wartość binarna wyniku przetwarzania Wbin=3D5HEX. Określić temperaturę
Przedstawić algorytm konwersji numerycznej binarnego wyniku przetwarzania A/C
Określ wartość Ux napięcia sygnału pomiarowego uzyskanego z 10-bitowego przetwornika A/C
ąc, że 2 najmłodsze bity wyniku znajdują się na pozycjach b7 i b6 słowa
. Napięcie referencyjne przetwornika URef+=5V a URef-=0V. Zapisz algorytm obliczeń w
Podczas rejestracji sygnału analogowego w przedziale obserwacji T=1s bipolarnym 12-bitowym
=1.25V) zarejestrowano minimalną i maksymalną wartość sygnału,
Określ wartość temperatury czujnika mikrokonwertera ADuC812 na podstawie pojedynczego
binarnego wyniku przetwarzania Xi=0x83BA
, przyjmując parametry: UREF-=0V, UREF+=2.5V,
śl średnią wartość temperatury czujnika mikrokonwertera ADuC812 na podstawie binarnych
, kanał pomiarowy M=8, kolejne wartości binarne
Określić względny błąd doboru częstotliwości próbkowania fprb= 32000Hz wykorzystując
Określ maks. częstotliwość sygnału wejściowego fmax M-kanałowego systemu akwizycji danych
Podczas rejestracji sygnału analogowego w przedziale obserwacji T=100ms unipolarnym 13-
bitowym przetwornikiem A/C (UREF=2.5V) zar
s rejestracji sygnału analogowego w przedziale obserwacji T=1s unipolarnym 14-bitowym
=1.25V) zarejestrowano minimalną i maksymalną wartość sygnału,
W systemie pomiarowym zmierzono kolejno wartości napięcia U1=0.35V, U2=5.5V i U3=-2.75V.
Wyznacz 3 kolejne adresy generowane w układzie DAG procesora sygnałowego, jeżeli: adres
bazowy rejestru cyklicznego B=1000HEX
, długość bufora cyklicznego L=0040HEX, modyfikator
Wyznacz 3 kolejne adresy generowane w układzie DAG procesora sygnałowego, jeżeli: adres
bazowy rejestru cyklicznego B=1000HEX
, długość bufora cyklicznego L=0020HEX, modyfikator
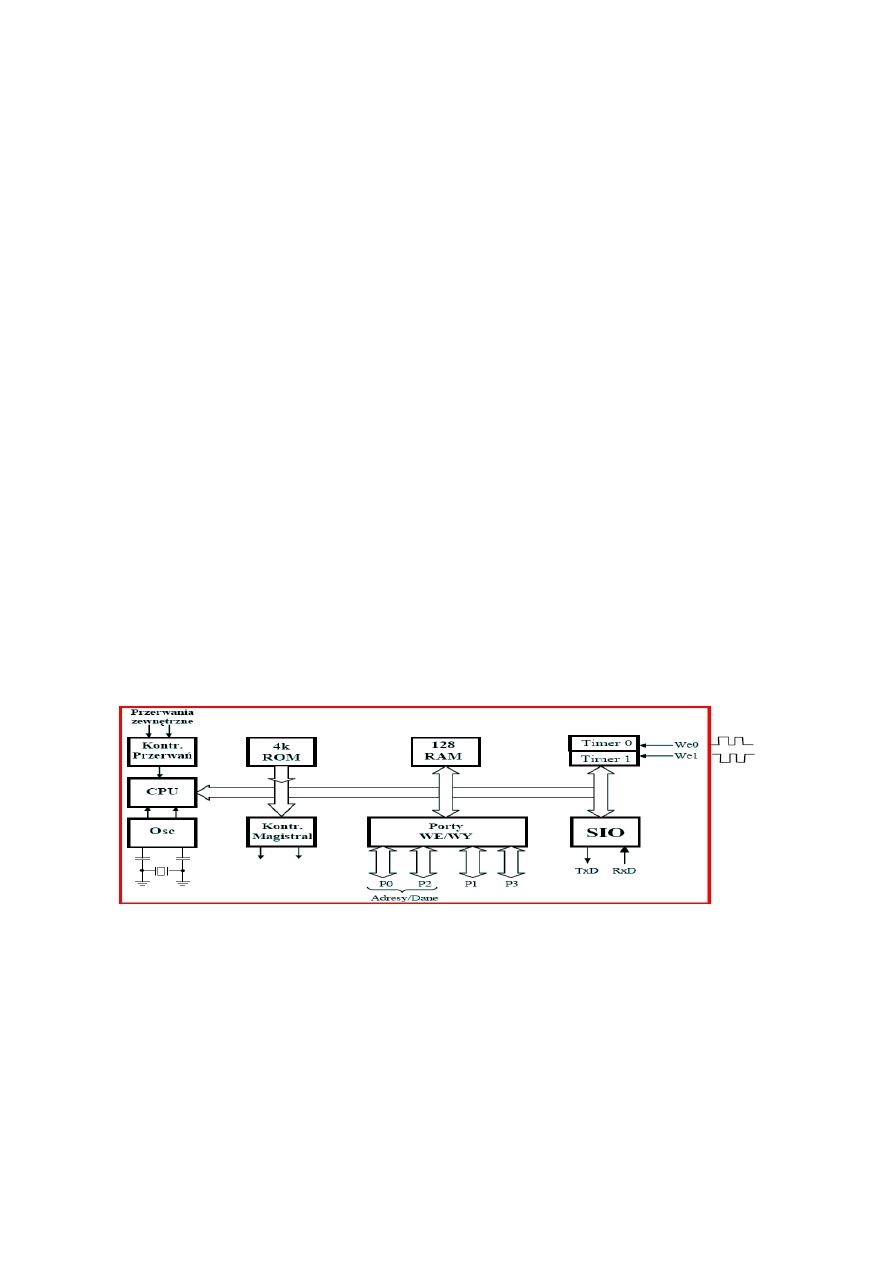
1.Narysować schemat blokowy struktury wewnętrznej
mikroprocesora typu 8051 lub 80c552 i scharakteryzować główne
moduły pod względem funkcjonalnym.
Wewnętrzna pamięć programu, typu ROM, ma pojemność 4096 (4K) słów 8-bitowych. Może być
rozszerzona do 64K bajtów przez dołączenie pamięci zewnętrznej.
Wewnętrzna pamięć danych, typu RAM, ma pojemność 128 bajtów. Możliwe jest dołączenie zewnętrznej
pamięci danych o pojemności do 64K słów (w ramach osobnej przestrzeni adresowej).
Układ czasowo-licznikowy zawiera dwa 16-bitowe liczniki, które mogą zliczać wewnętrzne impulsy
zegarowe lub impulsy zewnętrzne. Oba liczniki mogą pracować w jednym z czterech, ustawianych
indywidualnie, trybów.
Linie wejścia-wyjścia, których jest 32, są zorganizowane w cztery 8-bitowe porty. Część z tych linii
(zwłaszcza linie portu P3) może być wykorzystana do realizacji specjalnych funkcji.
Port szeregowy umożliwia niezależne nadawanie i odbieranie transmisji szeregowej. Może pracować w
czterech trybach.
Układ przerwań (dwupoziomowy) może obsługiwać dwa przerwania zewnętrzne i dwa z układu
czasowo-licznikowego oraz przerwaniez układuszeregowegowejścia-wyjścia(razem 5)
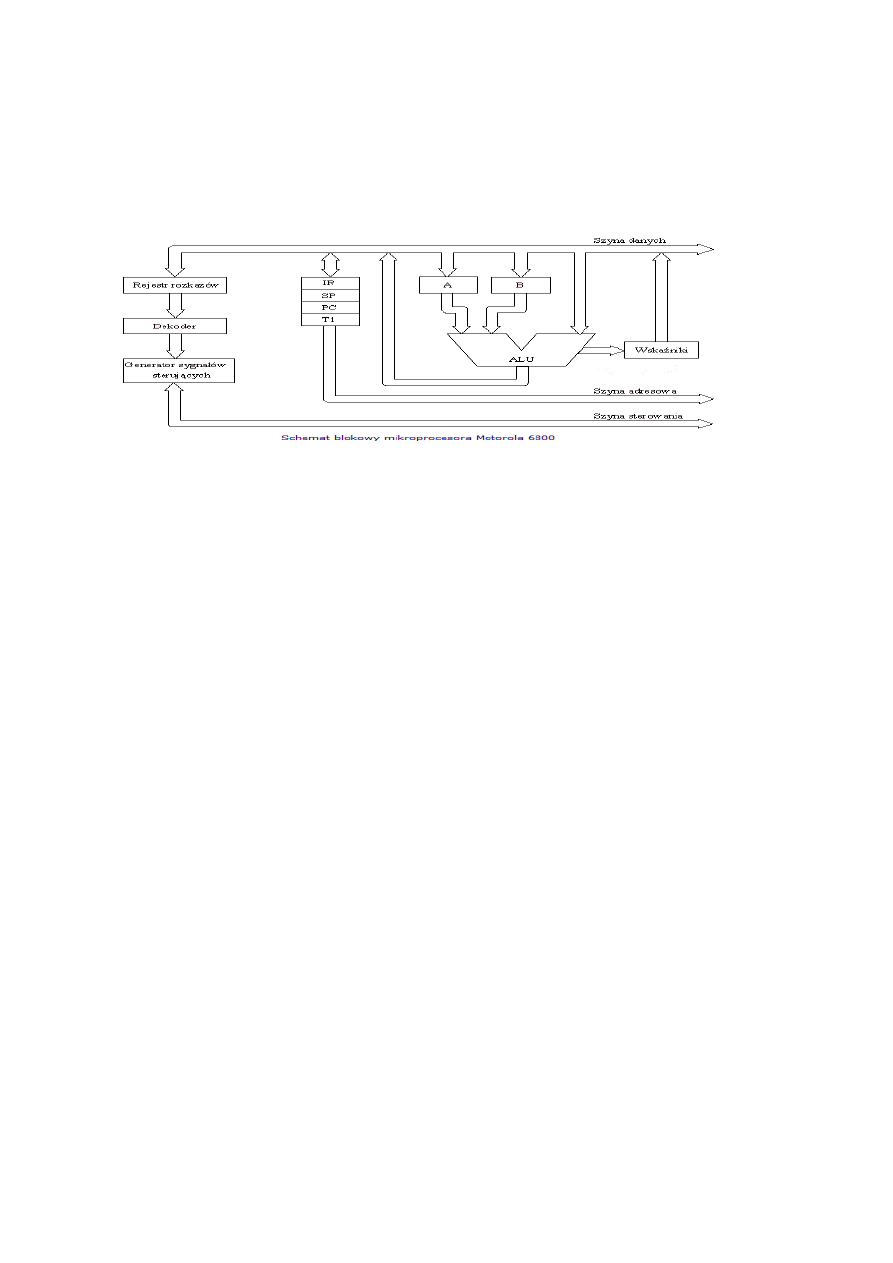
2. Narysować schemat blokowy struktury wewnętrznej
mikroprocesora typu M6800 lub M68HC11 i scharakteryzować
główne moduły pod względem funkcjonalnym.
Możliwości sprzętowe:
-
8 kilobajtów pamięci ROM,
-
512 bajtów pamięci EEPROM,
-
256 bajtów pamięci RAM (wartości nie giną po przejściu w stan uśpienia),
-
posiada 16-bitowe timery:
4 poziomowe programowalne preskalary (dzielniki),
3 funkcyjne wej. przechwytujące,
5 funkcyjnych wyj. przechwytujących,
-
szeregowy interfejs komunikacyjny SCI,
-
zewnętrzny interfejs szeregowy SPI (master, slave),
-
8 kanałów 8-bitowego przetwornika A/C,
-
przerwania czasu rzeczywistego (watch-dog; sprzętowe sprawdzenie poprawności działania
procesora,
Możliwości programowe:
-
wyposażony w instrukcje programowe procesora M6800/M6801,
-
bity manipulacji (sterowania),
-
tryb oczekiwania,
-
tryb zatrzymania.
Mikroprocesor typu M68HC11 wyposażony jest w moduł konwertera A/C który zamienia nam
wartości ciągłe (analogowe) na wartości cyfrowe które procesor może przetwarzać.
Posiada 2 interfejsy komunikacyjne: SPI do komunikacji z zewnętrznymi urządzeniami trybie
Master/Slave jak np.: konwertery C/A, zegary czasu rzeczywistego itp. Oraz interfejs szeregowy
RS232, RS485 do komunikacji np. z komputerem.
Posiada pamięć zorganizowaną w: 8 kilobajtów pamięci ROM, 512 bajtów EEPROM oraz 256 bajtów
podręcznej pamięci RAM. Posiada również jednostkę logiczną obsługującą przerwania: IRQ, XIRQ,
RESET; jednostkę kontroli trybu pracy; tryb uśpienia; jednostkę sterującą timerami i licznikami;
jednostkę umożliwiającą odczyt i zapis do zewnętrznej pamięci. Główną częścią całego
mikroprocesora jest jednostka sterująca czyli CPU.
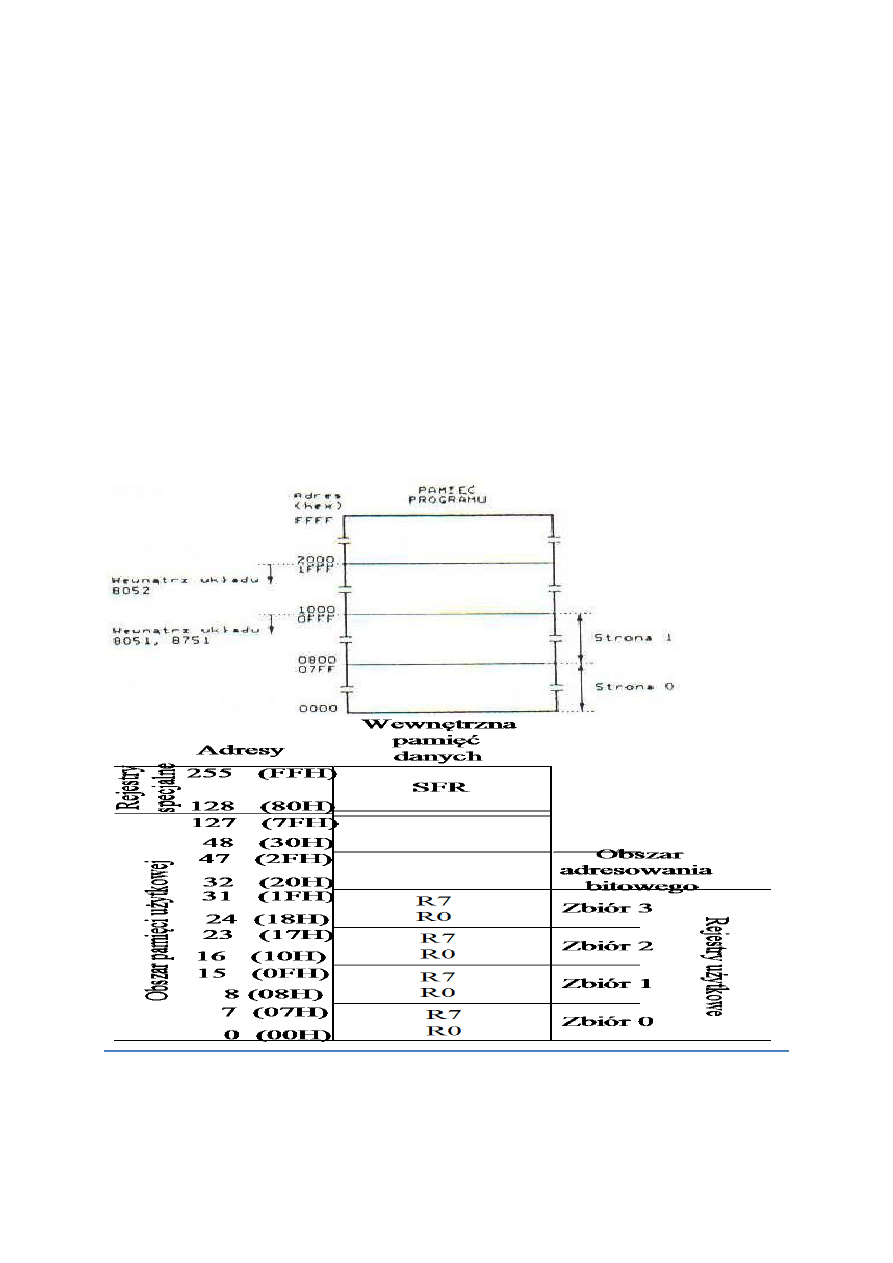
3. Omówić strukturę i organizację pamięci wewnętrznej układów
mikroprocesorowych rodziny MCS51.
Wewnętrzna pamięć danych zawarta w układzie mikrokomputera,
przeznaczonego na pamięć
użytkową, ma pojemność 128 lub 256 słów 8-bitowych, w zależności od typu układu
najdogodniejsza do zapamiętania argumentów i wyników wszelkiego rodzaju obliczeń. Większość
rozkazów przesłań dotyczy tej pamięci i to z niej są pobierane dane do większości
dwuargumentowych operacji arytmetycznych i logicznych. Ponadto, w ramach osobnej przestrzeni
adresowej można dołączyć do układu zewnętrzną pamięć danych o pojemności do 64K słów.
Programowy dostęp do tej pamięci jest możliwy tylko za pomocą rozkazów MOVX.
operandu (w kodzie instrukcji podawany jest numer tego rejestru)
Wewnętrzną pamięć danych adresujemy przez:
-
adresowanie przez nazwę rejestru ( dotyczy rejestrów roboczych R0...R7 ze wskazanego
przez wskaźnik RS zbioru; akumulatora A – rejestr specjalny ACC, adres224; wskaźnika
danych DPTR – rejestry specjalne DPH i DPL, adresy 131 i 130).
-
adresowanie bezpośrednie (pamięć użytkową RAM, adresy 0...127; obszar rejestrów
specjalnych, adresy 128...255, jest to jedyny sposób adresowania rejestrów z obszaru SFR)
-
adresowanie pośrednie zawartością rejestrów. Adresowanie to dotyczy obszaru pamięci
użytkowej RAM
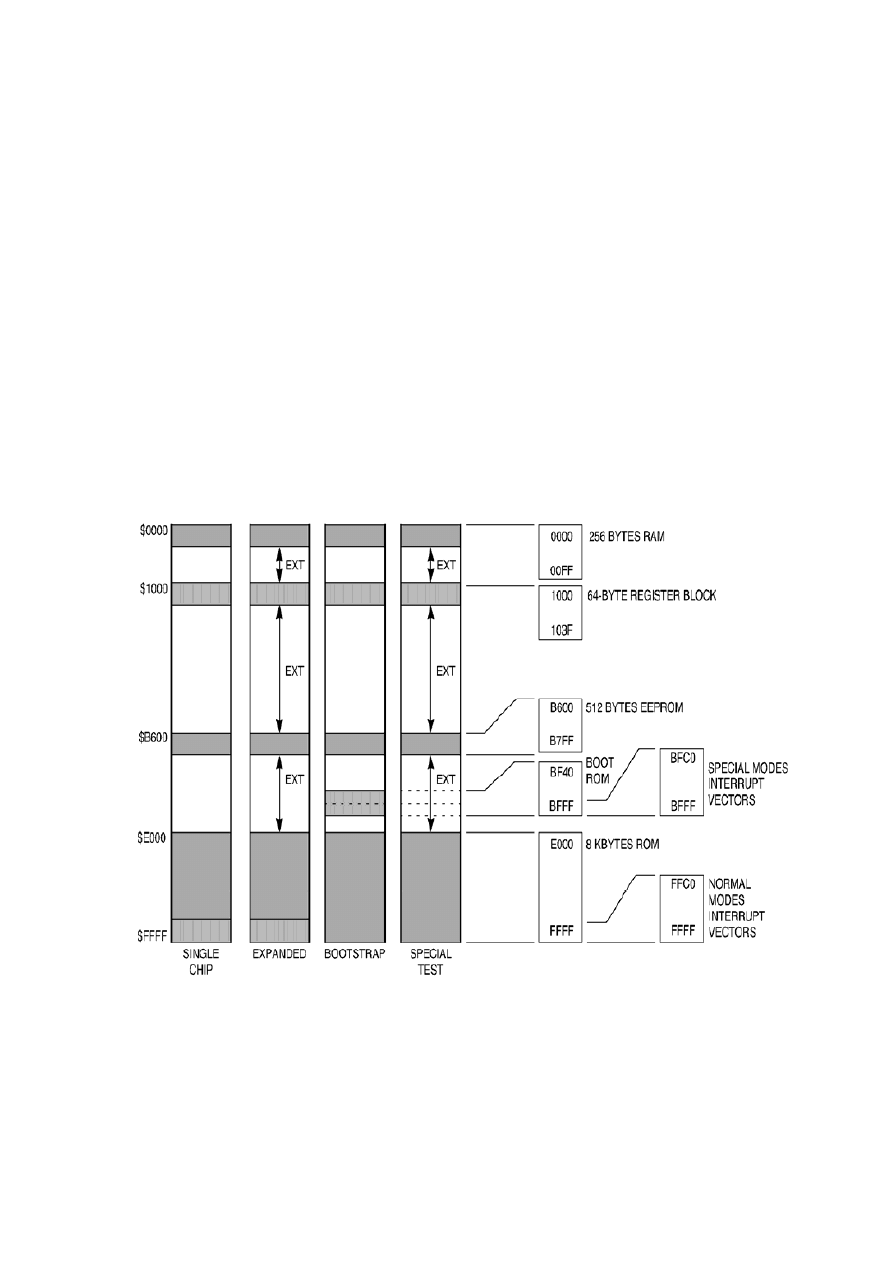
4. Omówić strukturę i organizację pamięci wewnętrznej układów
mikroprocesorowych rodziny M6800
Program, danych i stosu pamięci zajmują ten sam obszar pamięci. Całkowity rozmiar pamięci
adresowalnych jest 64 KB.
Pamięć programu - program może być umieszczony w dowolnym miejscu w pamięci. Skacz i
podprogramu instrukcji obsługi mogą być używane, aby przejść w dowolnym miejscu w pamięci.
Warunkowych i bezwarunkowych oddziały są ograniczone do adresów pamięci, umieszczone nie
dalej niż -125 - +129 bajtów z instrukcji oddziału.
Pamięć danych - dane mogą być w dowolnym miejscu w pamięci.
pamięci Stack - stos może być umieszczony w dowolnym miejscu w pamięci.
miejsc w pamięci zastrzeżone:
FFF8h - FFF9h: Pointer do przerwania IRQ rutynowego przetwarzania. FFFAh - FFFBh: Pointer
oprogramowania rutynowych przerwania przetwarzania.
FFFCh - FFFDh: Pointer do przerwania NMI rutynowego przetwarzania.
FFFEh - FFFFh: Wskaźnik do obsługi kodów RESET.
Niektóre adresy pamięci mogą być zastrzeżone dla odwzorowany w pamięci I / O, gdyż procesor nie
posiada sprzętu I / O możliwości.

5. Scharakteryzować sposoby adresowania rodzin mikroprocesorów MCS51
i M6800, cechy wspólne i różnice.
-
Natychmiastowe (immediate) dotyczy argumentu umieszczonego w kodzie instrukcji
(instrukcja z operandem bezpośrednim)
-
Rejestrowe bezpośrednie (register direct) wskazuje jeden z rejestrów procesora jako miejsce
operandu (w kodzie instrukcji podawany jest numer tego rejestru)
-
Bezpośredni (direct) – związany z adresowaniem danych w pamięci, efektywny adres
operandu podany jest bezpośrednio w kodzie instrukcji (bezpośrednio mogą być tylko wewn.
pamięć RAM i obszar rejestrów SFR)
-
Rejestrowy pośredni (register indirect) – adres komórki pamięci
przechowującej dany
operand odczytywany jest z rejestru procesora(przy wykorzystaniu rejestrów R0, R1
wybranego banku rejestrów - możliwe adresowanie pamięci RAM wewn. i zewn.)
-
Pośrednie- zawartością rejestru bazowego i indeksowego - do 16- bitowego adresu
bazowego (DPTR lub PC) jest dodawana 8-bitowa zawartość akumulatora A
Motorola
Dostępne są następujące tryby adresowania: bezpośredniego rejestru danych – Dn bezpośredniego
rejestru adresowego – An pośredniego rejestrem adresowym – (An)
pośredniego rejestrem adresowym z postinkrementacją – (An)+
pośredniego rejestrem adresowym z predekrementacją – -(An)
pośredniego rejestrem adresowym z przesunięciem – w(An)
pośredniego rejestrem adresowym z indeksem – b(An,Dn.[L,W]); b(An,Am.[L,W])
absolutnego krótkiego – w absolutnego długiego – l
licznikiem programu z przesunięciem – w(PC)
licznikiem programu z indeksem – b(PC,Dn.[L,W]); b(PC,An.[L,W])
natychmiastowe – #x
rejestru statusowego – SR
rejestru kodów warunków – CCR
Różnica między nimi polega na tym że np. w motoroli pod adresem 0 ukrywa się tylko jedna rzecz a w
51’ adres 0 może odnosić się do kilku miejsc(np. adres 0 w rejestrze R0 itd.). W Motoroli adresowanie
jest liniowe a w 51’ nie.
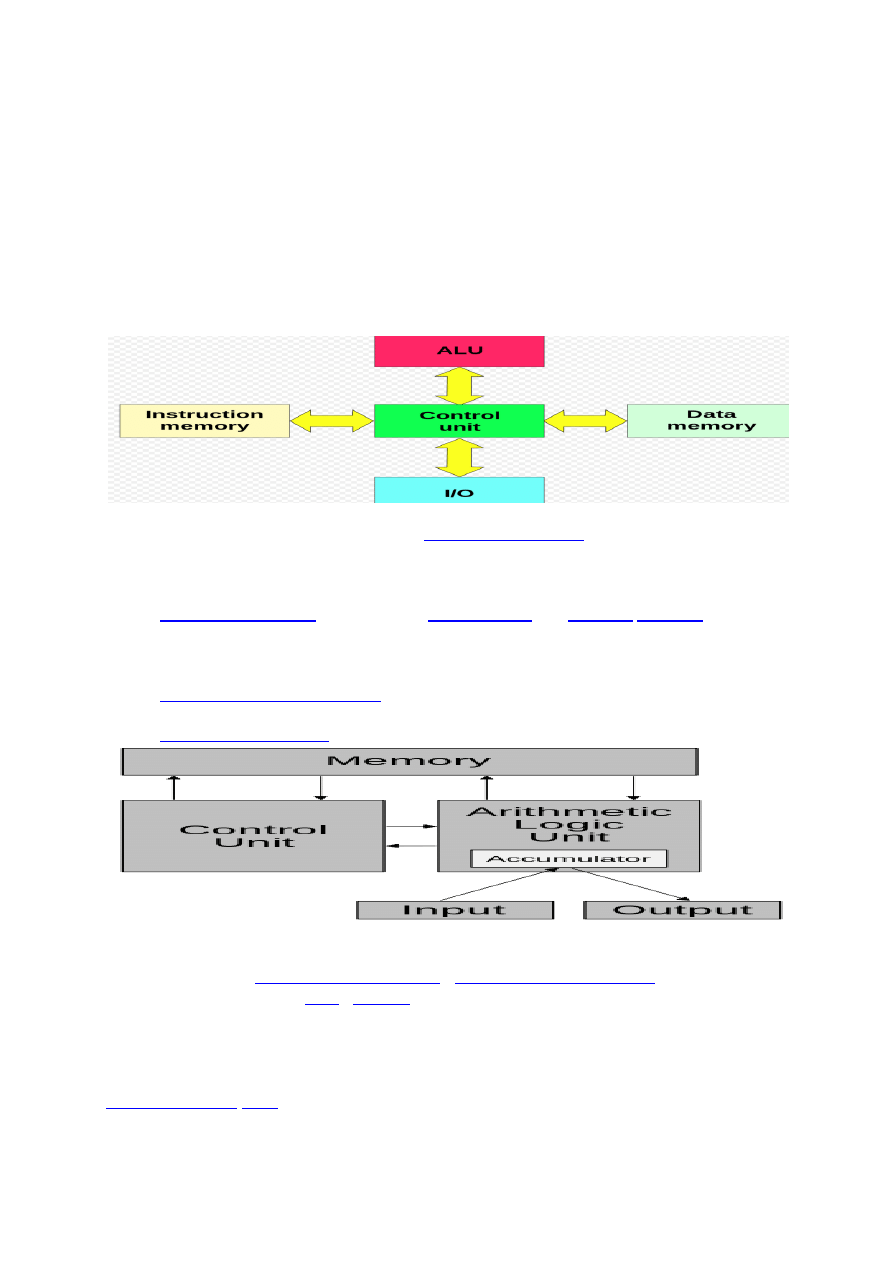
6. Porównanie architektury podstawowych systemów przetwarzania
danych w systemach mikroprocesorowych
Architektura harwardzka – rodzaj architektury komputera. W odróżnieniu od architektury von
Neumanna, pamięć danych programu jest oddzielona od pamięci rozkazów
[1]
.
Podstawowa architektura komputerów zerowej generacji i początkowa komputerów pierwszej
generacji.
Prostsza (w stosunku do architektury von Neumanna) budowa przekłada się na większą szybkość
działania - dlatego ten typ architektury jest często wykorzystywany w procesorach sygnałowych oraz
przy dostępie procesora do pamięci cache.
Architektura von Neumanna – pierwszy rodzaj
architektury komputera
. Cechą charakterystyczną tej
architektury jest to, że dane przechowywane są wspólnie z instrukcjami, co sprawia, że są kodowane
w ten sam sposób.
W architekturze tej komputer składa się z czterech głównych komponentów:
-
przechowującej
oraz
; każda
komórka pamięci ma unikatowy identyfikator nazywany jej adresem
-
jednostki sterującej odpowiedzialnej za pobieranie danych i instrukcji z pamięci oraz ich
sekwencyjne przetwarzanie
-
jednostki arytmetyczno-logicznej
odpowiedzialnej za wykonywanie podstawowych operacji
arytmetycznych.
-
służących do interakcji z operatorem
Zmodyfikowana architektura harwardzka − znana również jako architektura mieszana,
łączy w sobie cechy
. Oddzielone
, lecz wykorzystują one wspólne magistrale danych
i adresową. Niniejsza architektura umożliwia łatwe przesyłanie danych pomiędzy
rozdzielonymi pamięciami.
Przykładem wykorzystania zmodyfikowanej architektury harwardzkiej jest rodzina
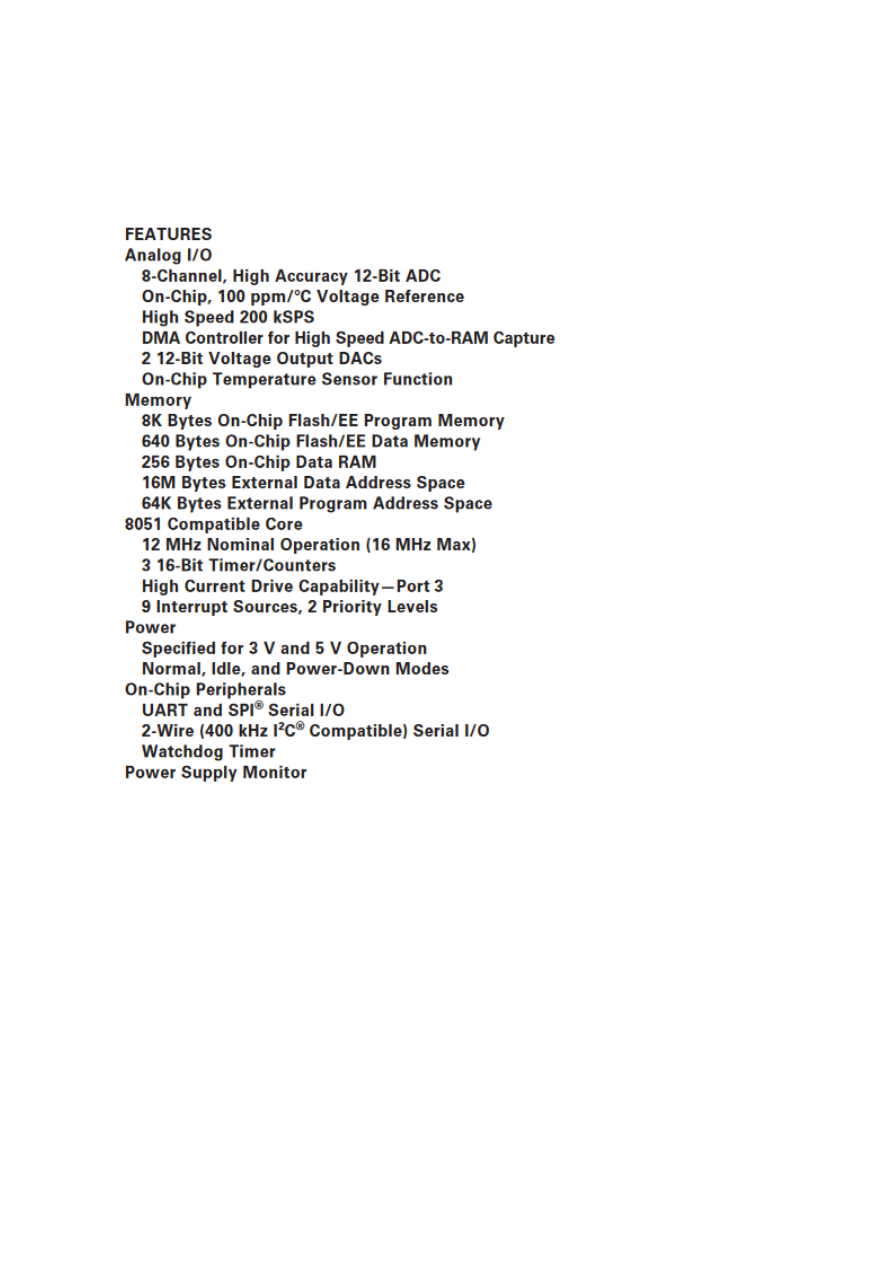
7. Omówić charakterystyczne cechy mikrokonwertera (na przykładzie
układu) jako podstawowego elementu inteligentnych czujników
pomiarowych
CHARAKTERYSTYKA OGÓLNA:
Ze względu na zastosowane technologie i związaną z tym miniaturyzację czujniki inteligentne, mimo
dużych możliwości będą miały małe wymiary i niewielką względnie cenę. Sygnały pomiarowe tych
czujników będą dostarczały więcej informacji po wprowadzeniu norm, ponieważ będą zawierały
jednostkę oraz symbol identyfikacyjny czujnika. Będą mogły by skorygowane ze względu na wielkości
wpływowe, możliwa jest również kalibracja. Przydatne są bezpośrednio w układach sterujących.
Transmisja będzie szybka i niezależna od sieci. Mimo zastosowania techniki cyfrowej, użytkownik ma
dostęp do sygnału analogowego.
8. Przedstawić metody transferu danych pomiędzy przetwornikiem
A/C a pamięcią w układach mikroprocesorowych
Algorytm obsługi przetwornika w trybie DMA:
-Wyłączy zasilanie przetwornika (tryb power down: MD1 iMD0 ustawione na 0 w rejestrze ADCCN1)
-Adres wskaźnika przesyłanych danych ustawic na początekobszaru danych, wskaźnik danych
określany jest 24-bitowo w rejestrach DMAL, DMAH, DMAP (wpisa w podanej kolejności)
-Przygotowac zewnętrzną pamięc danych, określic numery rzetwarzanych kanałów pomiarowych
oraz wielkośc bloku danych
-Przeprowadzic inicjalizację rejestrów ADC SFRs w następującej kolejności:
W ADCCON2 ustaw w tryb DMA (MOV ADCCON2,#40; DMA)
W ADCCON1 ustaw parametry czasowe konwersji i włącz zasilanie przetwornika
Proces konwersji DMA może być wyzwalany sygnałem startu pojedynczej konwersji, z układu licznika
L2 lub sygnałem zewnętrznym.
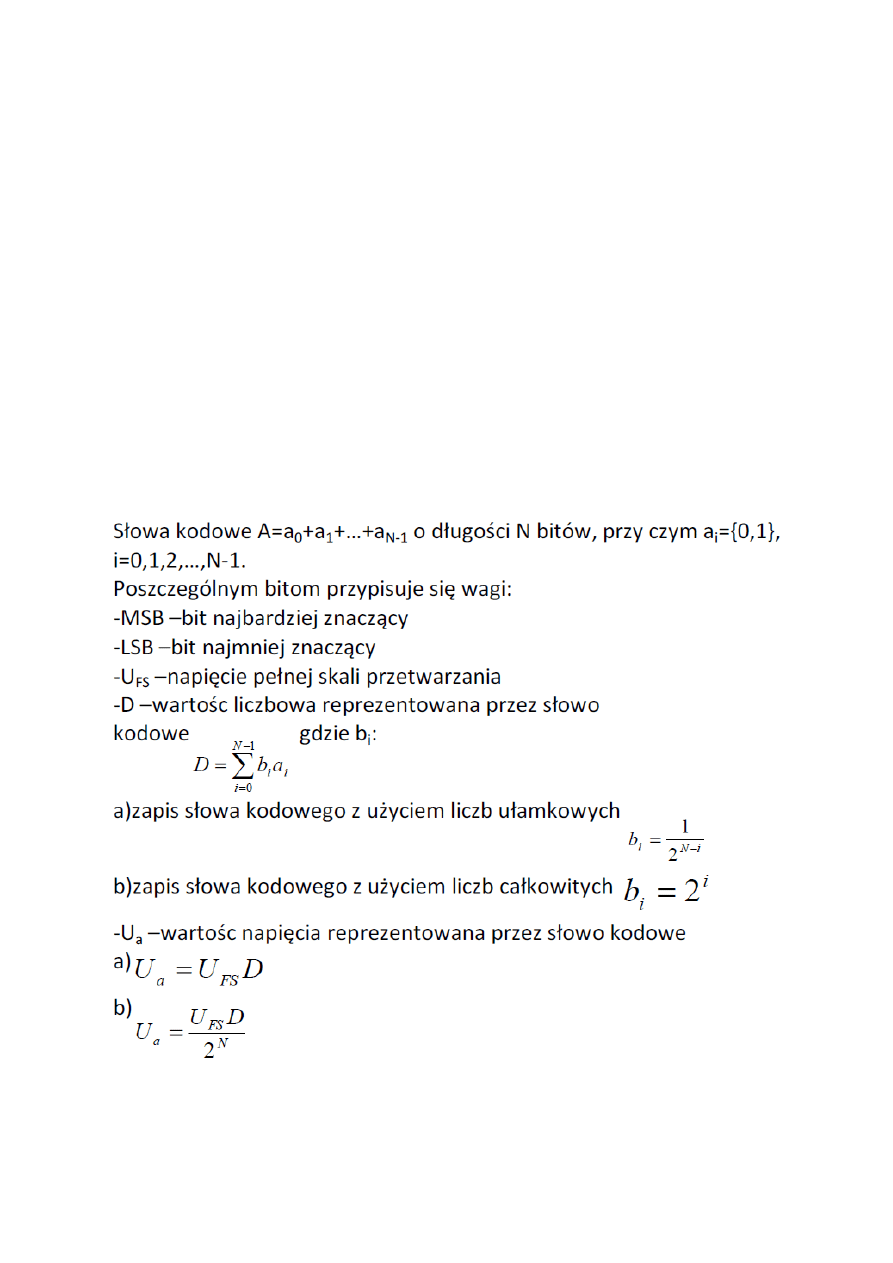
9. Scharakteryzuj budowę słów kodowych przetworników A/C
11. Podaj przykłady adresowania komórek pamięci leżących w
różnych obszarach pamięci mikroprocesora przy wykorzystaniu
poleceń języka programowania C. Uszereguj je pod względem czasu
dostępu do pamięci.
-
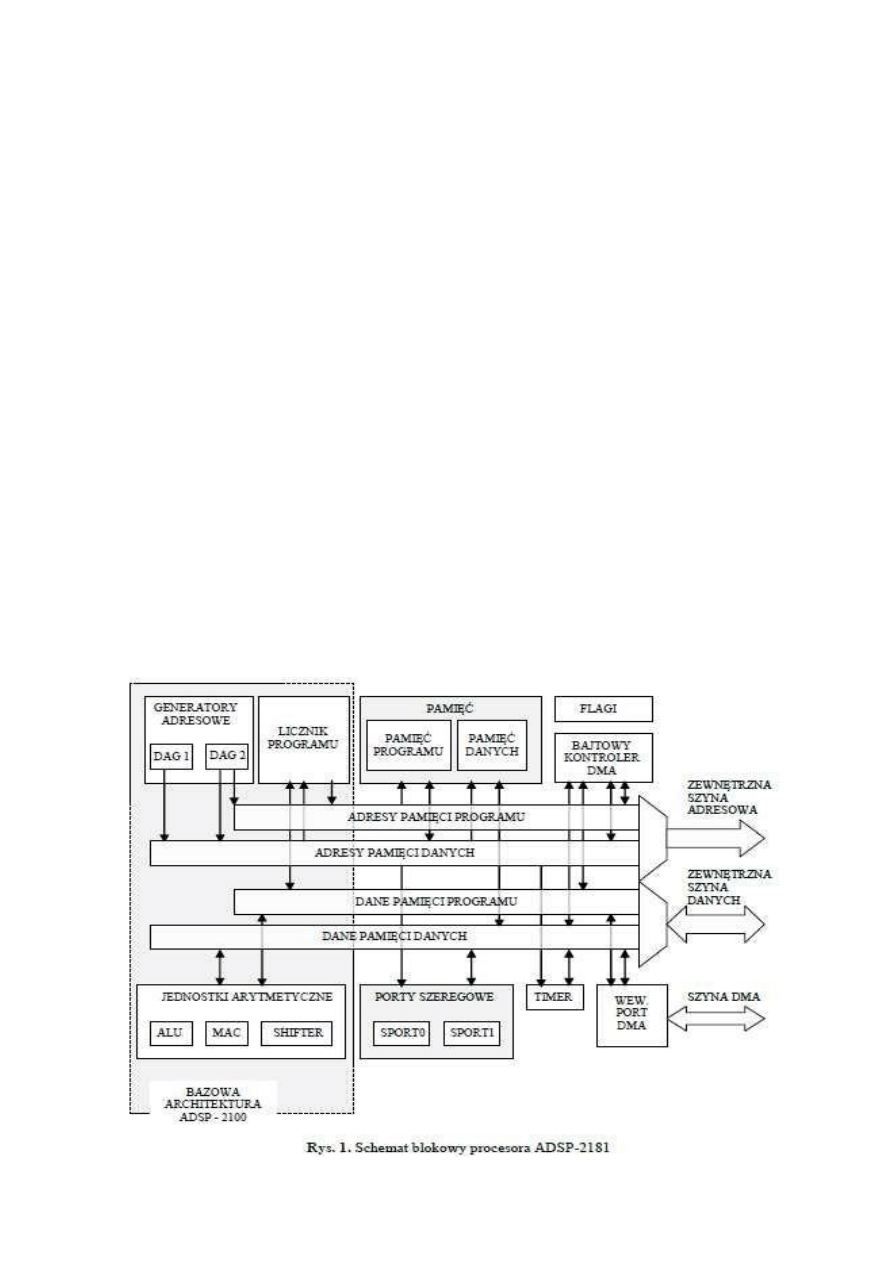
DSP Mikroprocesor z 16-bitową arytmetyką stałopozycyjną z własną pamięcią
-
rozszerzona architektura Harrwardska z trzema magistralami
-
niezależne jednostki obliczeniowe: ALU, MAC i Shifter
-
instrukcje realizowane w 1 cyklu maszynowym
-
pamięć RAM lub ROM i RAM danych w chipie mikropocesora
-
zintegrowane urządzenia we/wy: port szeregowy, zegar/licznik, interfejs portu
nadrzędnego.
-
generator adresu danych i sekwenser programu
Cechuje go posiadanie oddzielnych magistral dostępu do pamięci programu i pamięci danych, co
pozwala na niezależny dostęp do pamięci danych i pamięci programu i danych jednocześnie. Istnieje
moduł który pozwala na komunikację pomiędzy magistralami danych i programu, ale dostęp ten nie
jest to dostęp bezpośredni.
16kW(kilo słów) Dane 16-bitów (32 kB) 16kW Program 24-bitów(48kB)
Dzięki oddzieleniu jednostek ALU, MAC i Shifter jest możliwe np. iż wynik dodawania będzie
argumentem w operacji mnożenia a wynik całej operacji uzyskuje się w ciągu 1 cyklu rozkazowego.
12. Scharakteryzować system magistral i połączenia podstawowych
jednostek funkcjonalnych w mikroprocesorach sygnałowych na
przykładzie rodziny ADSP2100.
13. Przedstawić rolę buforów cyklicznych procesorów sygnałowych w
algorytmach cyfrowych filtrów numerycznych.
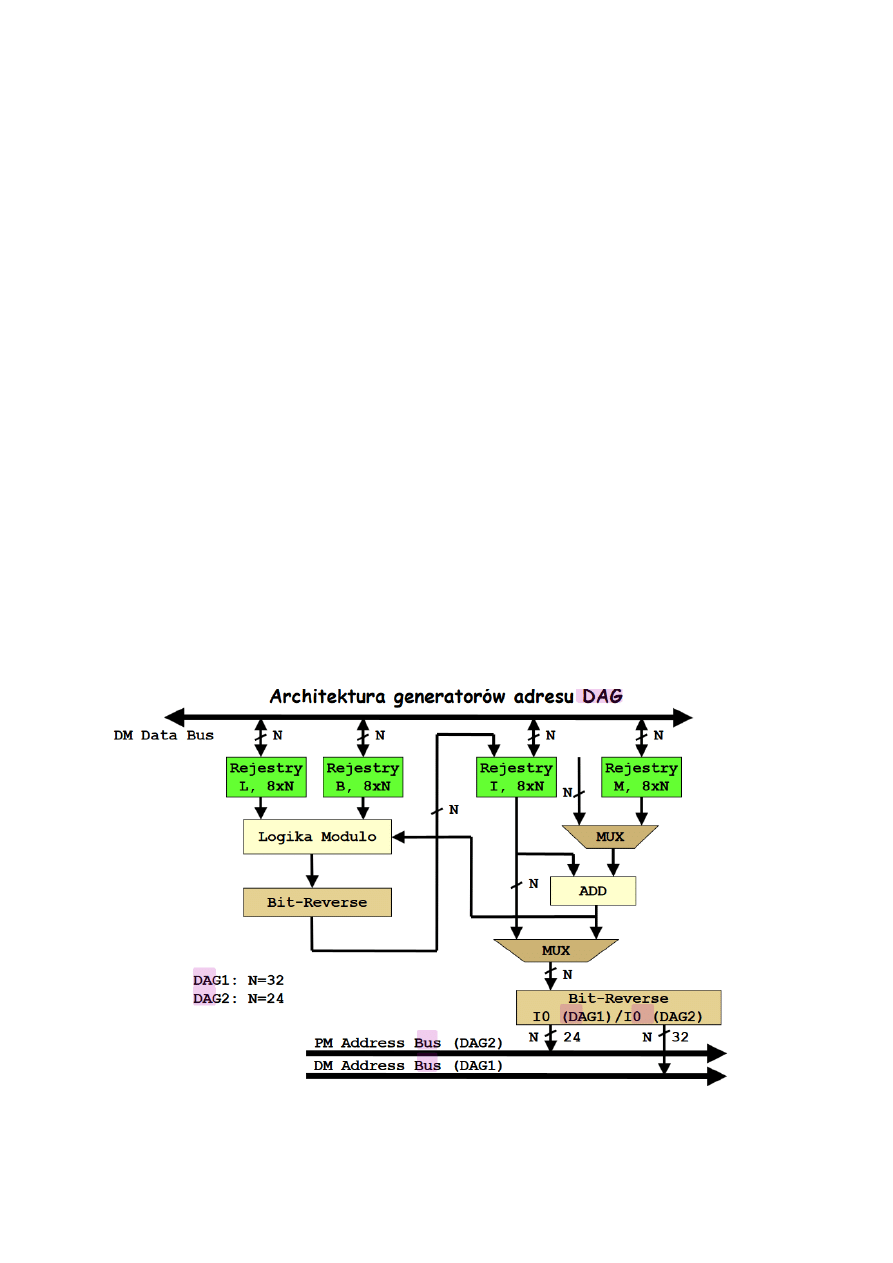
Bufory cykliczne wykorzystują automatyczną implementację generowania adresów modulo dla
dostępu do buforów cyklicznych. Do oblicznia kolejnego adresu wykorzystuje się następujące
informacje:
-bieżącą lokalizacją, przechowywaną w rejestrze I (bez znaku)
-wartośc modyfikującą, przechowywaną w rejestrze M (ze znakiem)
-długośc bufora przechowywaną w rejestrze L (bez znaku)
-bazowy adres bufora
14.
Opisać zasady transferu danych w systemach DSP
wykorzystujących generatory adresu DAG.
Generatory adresu danych DAG
są jednostkami zaprojektowanymi do generowania adresów
pośrednich w celu wskazania danych w pamięci. Operują na danych 14-bitowych.
Każda jednostka posiada 3 różne typy rejestrów:
I (rejstry indeksowe):
zawierają bieżący adres,
M (rejestry modyfikujące):
zawierają różnicę pomiędzy bieżącym i następnym adresem,
L
(rejestry długości):
zawierają rozmiar bufora cyklicznego (dla zapewnienia normalnego
liniowego adresowania ustawiane są
na 0).
Każda jednostka DAG zawiera po 4 rejestry każdego typu, numerowane od 0 do 3 dla DAG1 i
od 4 do 7 dla DAG2. Rejestry L
i I są niezależne,
15.
Przedstawić strukturę rejestrów roboczych systemów DSP na
przykładzie procesora rodziny ADSP20xx.
16. Omówić rolę rejestrów roboczych (R0-R7) w specjalizowanych w
mikrokontrolerach. Podać programowe przykłady obsługi tych
rejestrów.
W pamięci użytkowej słowa o adresach 0-31 stanowią cztery zbiory uniwersalnych rejestrów
roboczych R0-R7. W danej chwili dostępne są rejestry tylko z jednego zbioru, wskazanego przez 2-
bitowy wskaźnik zbioru rejestrów, który z kolei może być zmieniany programowo. Drugi i dalsze
zbiory mogą być używane jako rozszerzenie pierwszego, oraz przeznaczone do wykorzystania w
programach obsługi przerwań lub podprogramach, kiedy istotne jest zachowanie zawartości
rejestrów zbioru pierwszego, używanych w programie głównym. Rejestry R0 i R1 z aktywnego
zbioru pełnią funkcję wskaźników danych do adresowania pośredniego zawartością rejestru pamięci
danych, wewnętrznej i zewnętrznej. W wewnętrznej pamięci danych za pomocą tych wskaźników
jest możliwe adresowanie tylko obszaru pamięci użytkowej (0-7FH). W obszarze o adresach 128-255
jest umieszczona grupa rejestrów specjalnych. Należą do nich: Akumulator, rejestr B, słowo stanu
programu, wskaźnik stosu, wskaźnik danych oraz DPTR, porty 0-3, słowo sterujące do ustawiania
priorytetów przerwań, słowo sterujące pracą systemu przerwań, słowo sterujące i kontrolne układu
czasowo- licznikowego i systemu przerwań, słowo sterujące do ustawiania trybu pracy liczników w
układzie czasowo-licznikowym, 16-bitowy licznik T0, 16-bitowy licznik T1, słowo sterujące licznika 2,
16-bitowy licznik T2, słowo ładowane do licznika T2, słowo sterujące portu szeregowego, bufor
portu szeregowego, słowo sterujące zasilania.
17. Omówić metody konfiguracji (wyboru trybu pracy) typowych
programowanych modułów zegarów/liczników (T0, T1, T2) MCS-51.
Układy czasowo – licznikowe zawierają dwa 16 –bitowe liczniki T0 i T1. Mogą one zliczać impulsy
zewnętrzne, doprowadzone do wejść, odpowiedni T0 (P3.4) lub T1(P3.5), spełniają w ten sposób
funkcję licznika. Mogą też zliczać wewnętrzne impulsy zegarowe, celu odmierzenia opóźnień czy
generowania przerwań zegarowych o zadanej częstotliwości. W tym przypadku spełniają funkcję
czasomierza. Poza tym każdy z nich może pracować w jednym z czterech indywidualnie ustawionych
trybów.
Ustawienia trybu pracy (TMOD słowo to ustawia tryby pracy)
M0, M1 (bity sterujące) – wybór trybu.
Określa tryb pracy licznika Ti: M1 M0 = 00-tyrb 0: 8-bitowy licznik THi taktowany poprzez 5-bitowy
dzielnik TLi; M1 M0 = 01- tryb 1: 16- bitowy licznik THi, TLi: M1 M0 = 10- tryb 2: 8 –bitowy licznik
TLi z automatycznym wpisywaniem wartości początkowej z THi: M1 M0 =
11 –tryb3: licznik T0 – dwa niezależne 8 –bitowe liczniki: TL0 (sterowany za pomocą bitów
sterujących licznika T1) i TH0 (sterowany za pomocą bitów sterujących licznika T1); licznik T1
zatrzymany.
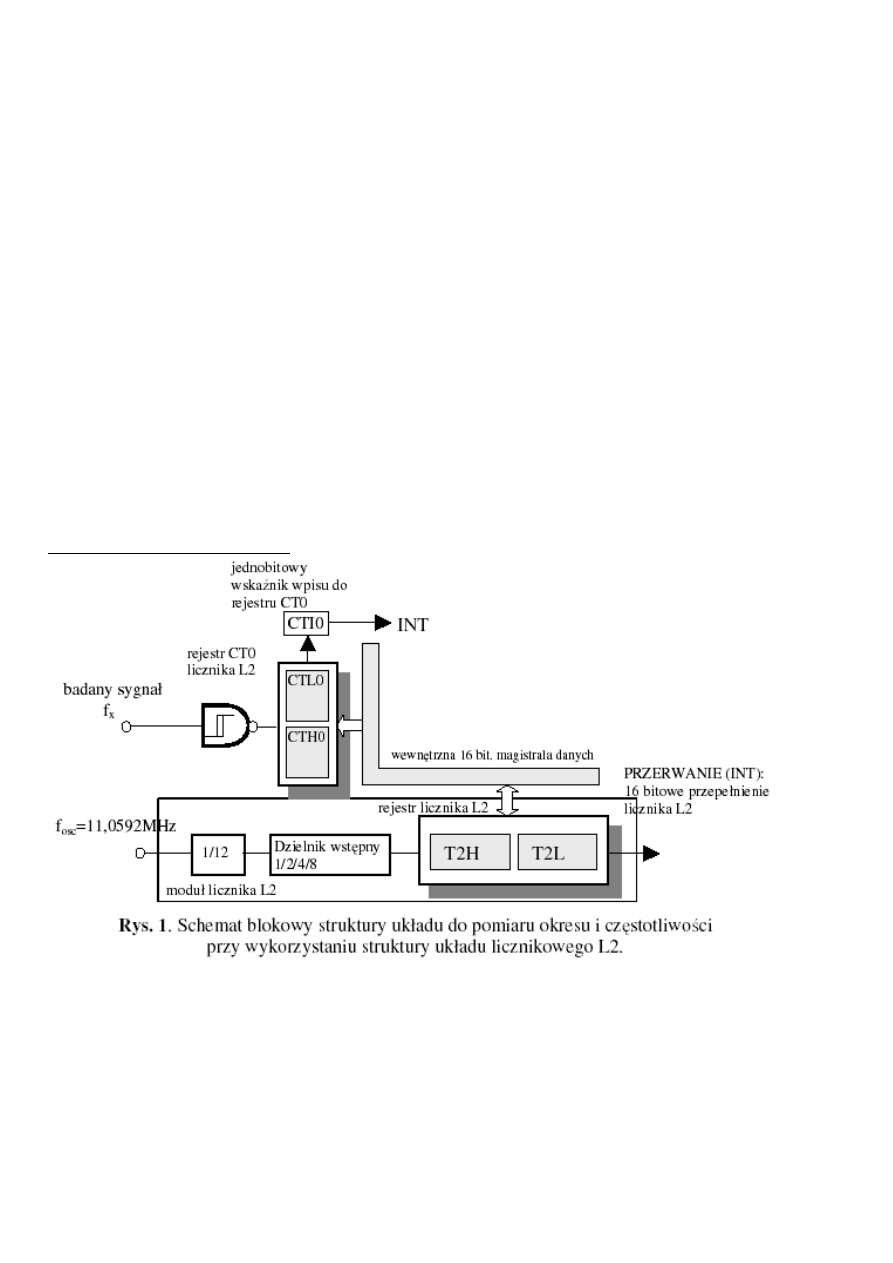
18. Narysować schemat blokowy układu do pomiaru okresu T
x
sygnału
napięciowego przy wykorzystaniu specjalizowanego modułów zegarów/liczników
MCS51. Przedstawić analizę błędów pomiarowych układu.
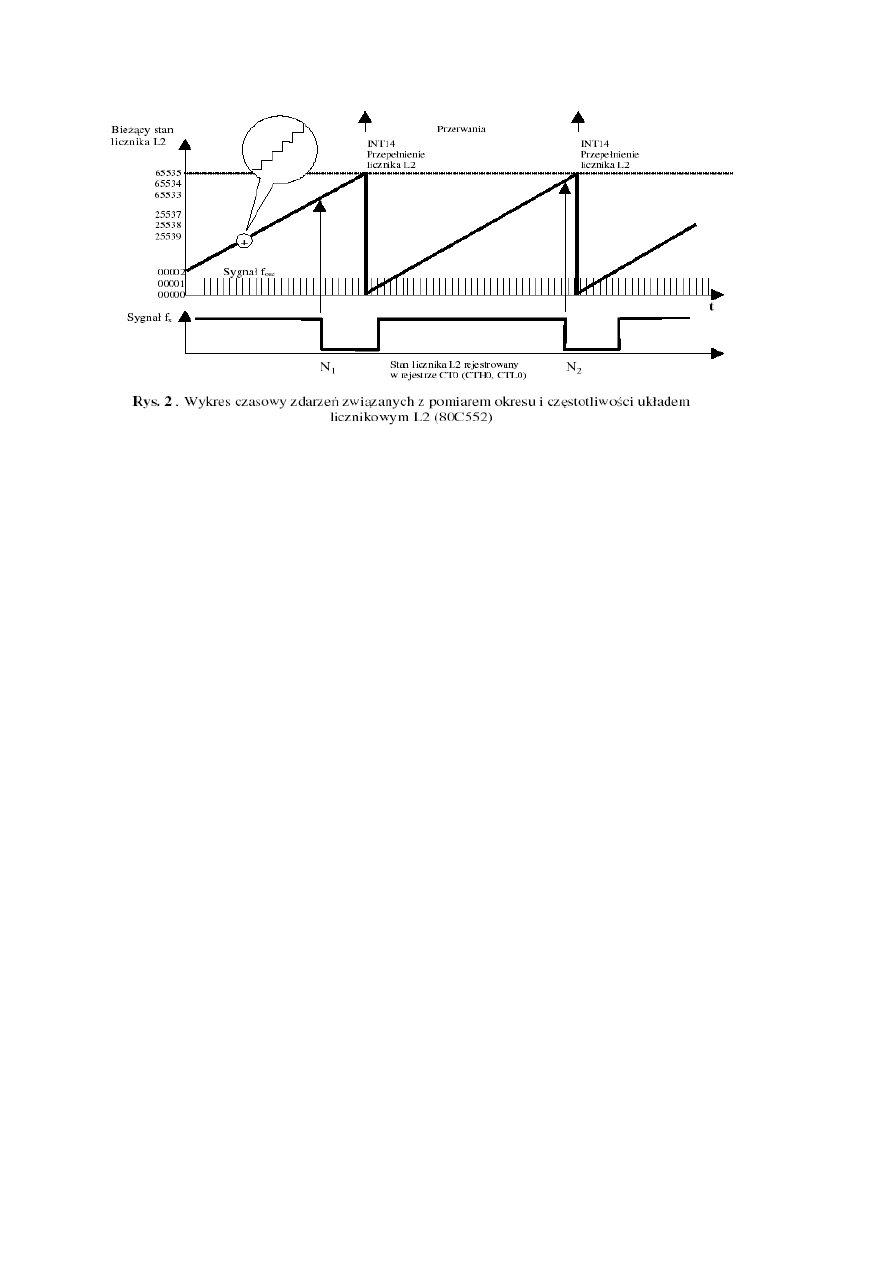
długość słowa licznika L2:N(16) pojemność licznika L2:2^n(65536) liczba przepełnienia licznika
L2:Nirq okres sygnału Tx:
Tx=Tosc[(N2-N1)+Nirq*2^n] Częstotliwość fx=1/Tx
19.
Omówić zasady obsługi przetworników obrotowo-impulsowych w
systemie mikropro
cesorowym.Zaproponować rozdział zadań pomiędzy
sprzęt i oprogramowanie.
Przetworniki obrotowo-impulsowe są przeznaczone do pomiaru przemieszczeń kątowych, a więc
zarówno do pomiaru kąta jak i prędkości kątowej. Z pomocą napędu paskowego, zębatki lub koła
ciernego mogą być mierzone również przemieszczenia liniowe. Przetworniki te pozwalają na
określenie pozycji względnej przez zliczanie impulsów. Przy tym kierunek ruchu może być
rozpoznawany dzięki przesunięciu fazowemu kanałów A i B, tak, że elektronika współpracująca musi
dodawać lub odejmować przychodzące impulsy (tzw. kwadratura). Kanał zerowy C (indeks) oznacza
przy każdym obrocie przetwornika pozycję absolutną, która może służyć do wyznaczania pozycji
zerowej układu pomiarowego. Przy zgraniu tego sygnału z sygnałem z inicjatora umieszczonego np.
na początku stołu frezarki, uzyskać można precyzyjny punkt zerowy mimo dużej histerezy inicjatora.
Rozdzielczość przetwornika określana jest w działkach odpowiadających liczbie kresek na tarczy
podziałowej przetwornika lub liczbie okresów fali prostokątnej wychodzącej z jednego kanału
przetwornika. Licznik rozróżnia wszystkie zbocza sygnałów prostokątnych, co zwiększa liczbę
impulsów 4-krotnie. Przetworniki impulsowe wykonywane są w kilku standardach wyjść:
najpopularniejszy OC umozliwia pracę wyjścia z różnym od zasilania przetwornika napięciem układu
wejściowego i jest idealny do zapewnienia optoizolacji układu pomiarowego, standard NL z
zasilaniem +5V dobrze nadaje się w do dużych prędkości, standard PP chętnie jest stosowany w
warunkach przemysłowych ze sterownikami PLC. W szerokiej gamie przetworników oferujemy
enkodery do pracy ręcznej jako zadajniki, miniaturowe w obudowie przemysłowej, przemysłowe ze
wzmocnioną osią, z otworem na oś, o małej i bardzo dużej rozdzielczości.
20.
Narysować schemat blokowy układu do pomiaru okresu T
x
sygnału
napięciowego przy wykorzystaniu specjalizowanego modułów
zegarów/liczników MCS51. Przeanalizować procesy numeryczne
realizowane przez mikroprocesor.
Patrz 18. To samo
21.
Omówić zasady dołączania peryferyjnych urządzeń
elektronicznych do mikroprocesorów – schematy strukturalne.
Dołączanie urządzeń zewnętrznych możliwe jest tylko w ramach przestrzeni adresowej
zewnętrznej pamięci danych. Sam procesor nie rozróżnia jakie urządzenie jest dołączone, widzi je
jako część pamięci adresowej. Urządzenia te rozróżnia układ GAL, a obsługują je 2 linie (RD,WR)
oraz porty P0 i P2. Do rozbudowy pamięci systemu mogą być użyte dowolne uniwersalne układy
pamięci, lub specjalizowane układy peryferyjne, przystosowane do współpracy z multipleksowaną
magistralą. Do rozbudowy we-wy można wykorzystać dowolne układy we-wy, np. z rodziny
MCS80. Należy jednak dodać, że rozbudowa systemu, a zwłaszcza dołączanie zewnętrznej
pamięci programu, odbywa się kosztem zmniejszenia linii we-wy (nie mogą być użyte porty P0 i
P2), oraz strat części zalet jednoukładowości mikrokomputera.
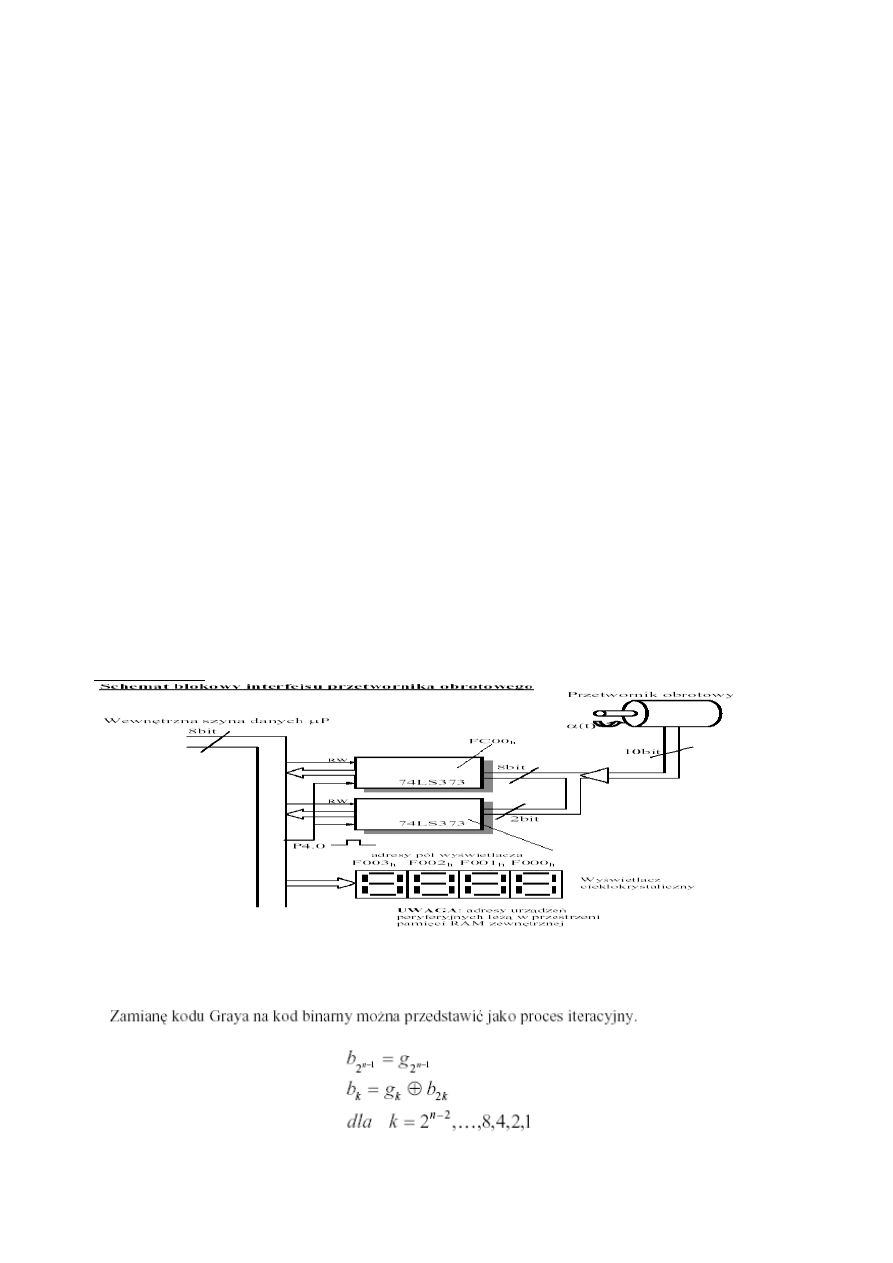
22.
Omówić zasady obsługi przetwornika kąta obrotu z wyjściem
równoległym w systemie mikroprocesorowym. Przedstawić koncepcję
dekodowania kodu Gray’a w oparciu o tablicę wartości kodowych.
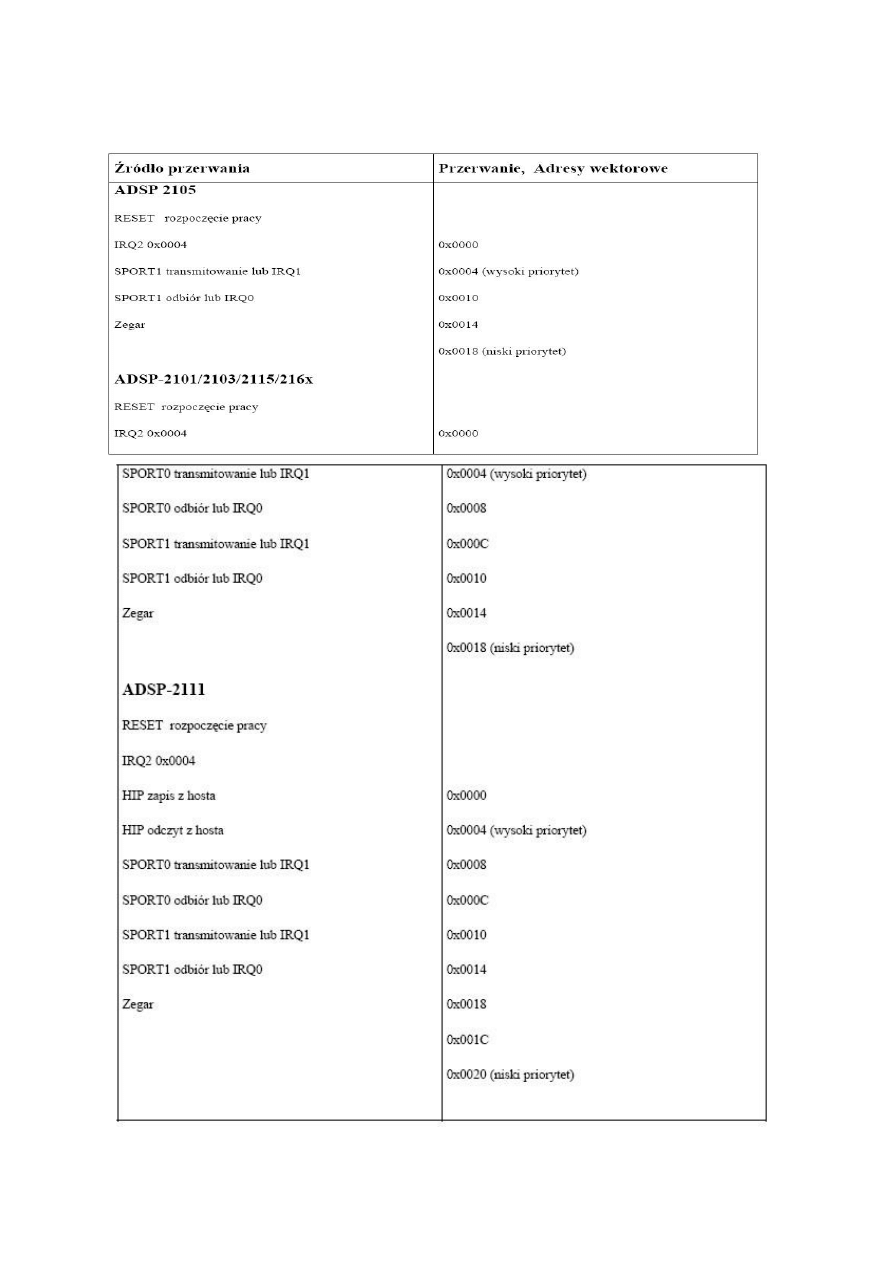
23.
Omówić system obsługi przerwań w mikroprocesorach rodziny
MCS51. Źródła przerwań, priorytety przerwań, wektory przerwań.
24. Układy diagnostyczne typu WATCH-DOG - zasada wykorzystania w
algorytmach przetwarzania numerycznego.
Watchdog (ang. pies stróżujący) to urządzenie lub program, najczęściej układ elektroniczny,
chroniący system mikroprocesorowy przed zbyt długim przebywaniem w stanie zawieszenia. Jego
działanie polega na zresetowaniu procesora w przypadku nieotrzymania w określonym czasie
sygnału generowanego przez program. Występuje w dwóch głównych wariantach: sprzętowym oraz
programowym. Sprzętowy uznawany jest za znacznie bardziej niezawodny. W oprogramowaniu
umieszcza się funkcję ustawiającą wartość licznika na pewną wartość początkową. Z upływem czasu
mierzonego przez niezależny od procesora zegar, wartość licznika zmienia się (zwykle maleje), co
określony czas. Jeśli osiągnie pewną wartość, zwykle jest nią 0, następuje opisane zresetowanie
procesora lub generowane jest przerwanie. Jednym z założeń poprawnej pracy systemu z
watchdogiem jest ustawianie na nowo wartości licznika co pewien czas. Ta funkcja jest umieszczana
w programach tak, by wykonywać się co czas mniejszy od czasu wyzerowania licznika. Jeśli program
przestanie działać poprawnie – np.: wpadnie w wieczną pętlę lub zakleszczy się i nie będzie ustawiał
licznika na nowo, można założyć że reset jest uzasadniony. W ten sposób watchdog chroni system
komputerowy przed nieprzewidzianym zatrzymaniem się.
Watchdog jest instalowany w systemach, które działają często bez obsługi człowieka, ich
nieprzerwane działanie jest bardzo ważne lub działanie nieprzewidziane może być niebezpieczne. Są
standardem w systemach wbudowanych funkcjonujących w różnych urządzeniach. W większości
współczesnych mikrokontrolerów watchdog jest jednym z elementów ich architektury i nie trzeba
stosować dodatkowego sprzętu. A system udostępnia rozkazy procesora do ustawiania parametrów
i resetowania watchdoga. Niektóre systemy operacyjne udostępniają mechanizmy zapobiegające
zawieszeniu się (zablokowaniu) systemu w przypadku jego błędu (panika jądra) oraz
oprogramowanie obsługi watchdoga programowego i sprzętowego, np pakiet watchdog w Linuksie.
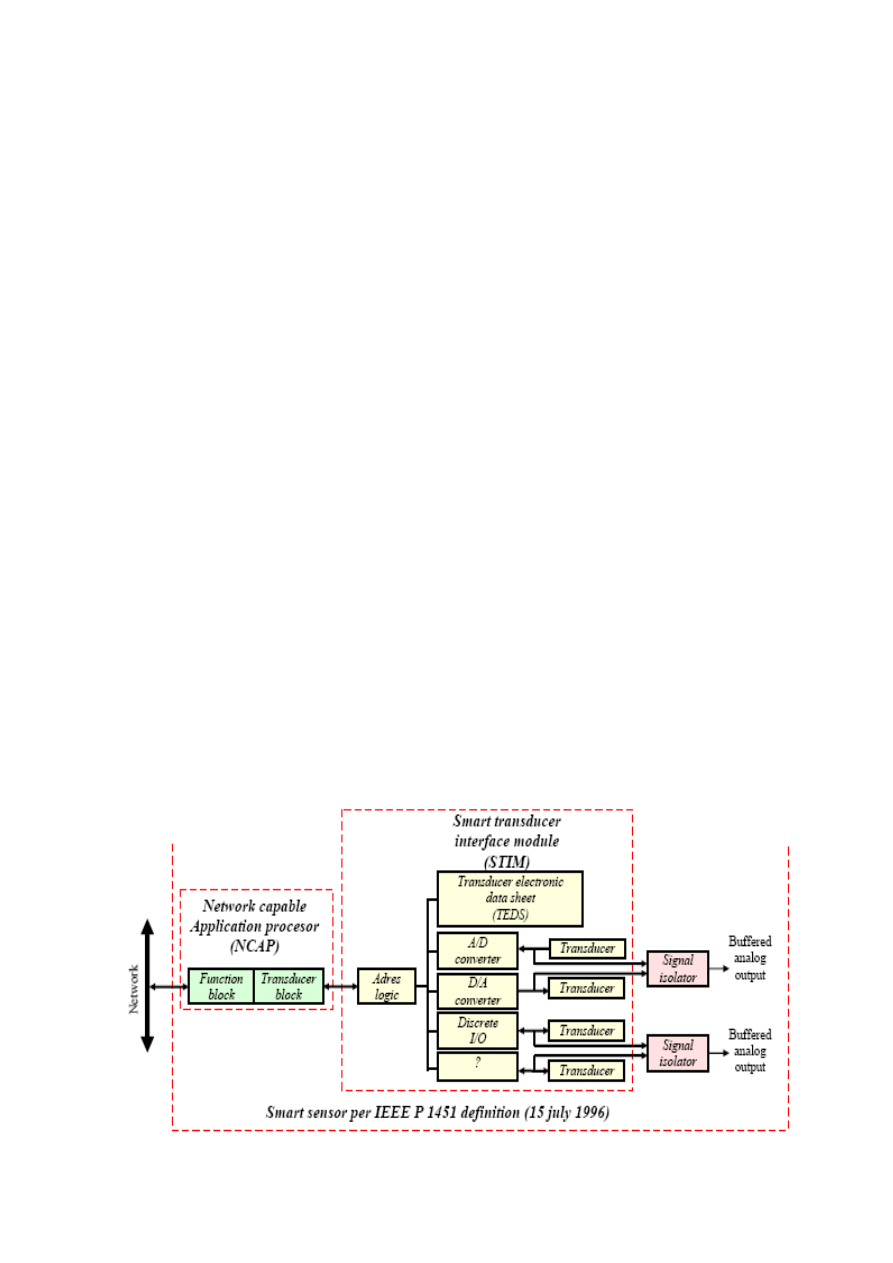
25.
Na podstawie schematu blokowego przedstaw strukturę
inteligentnego czujnika pomiarowego w/g IEEE 1451. Jakie elementy
s
kładowe zawiera cyfrowy komunikat reprezentujący wyjściowy
sygnał pomiarowy czujnika.
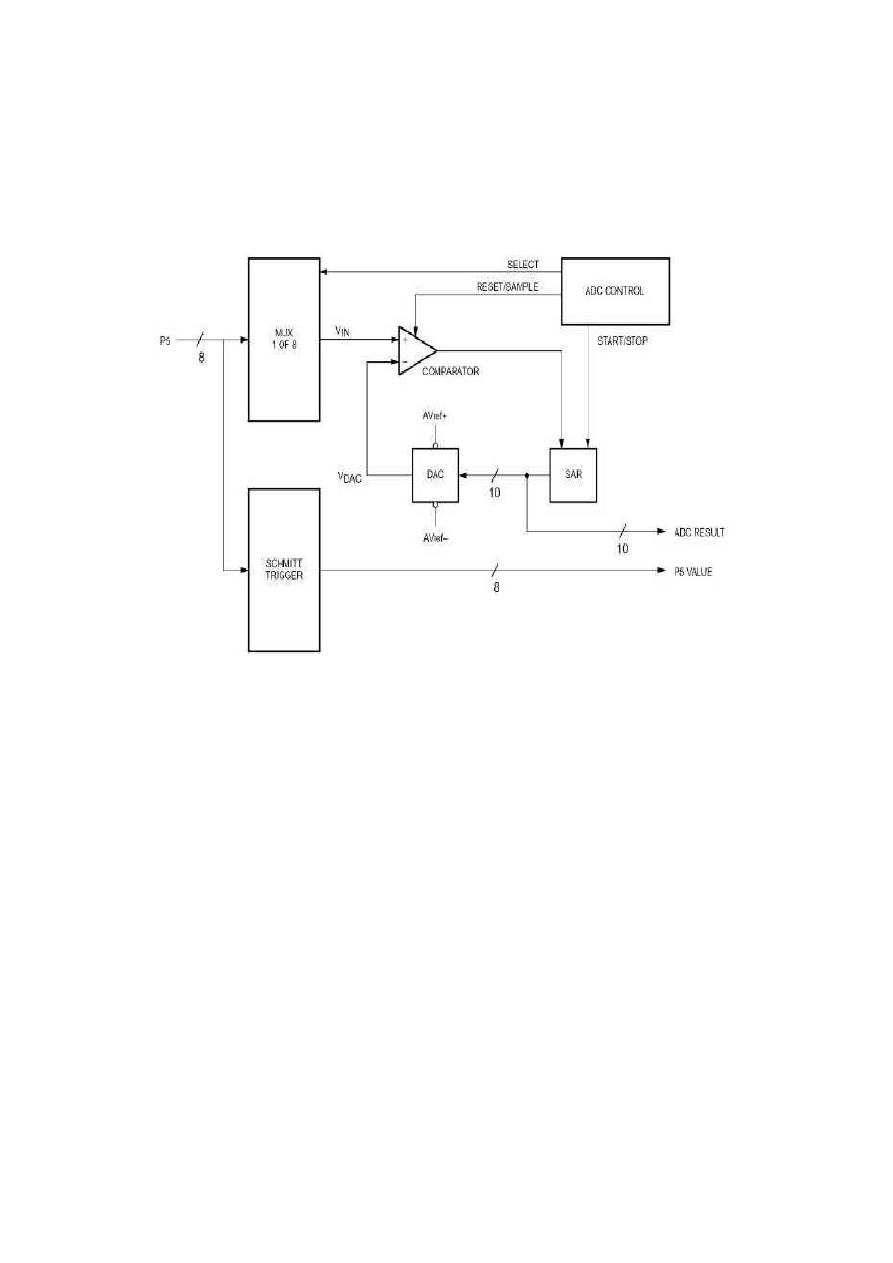
26. Opisać budowę przetworników A/C stosowanych w
mikrokontrolerach jednoukładowych MCS51 (układy sterujące,
rejestry aproksymacyjne, multipleksery
analogowe, źródła napięć
r
eferencyjnych).
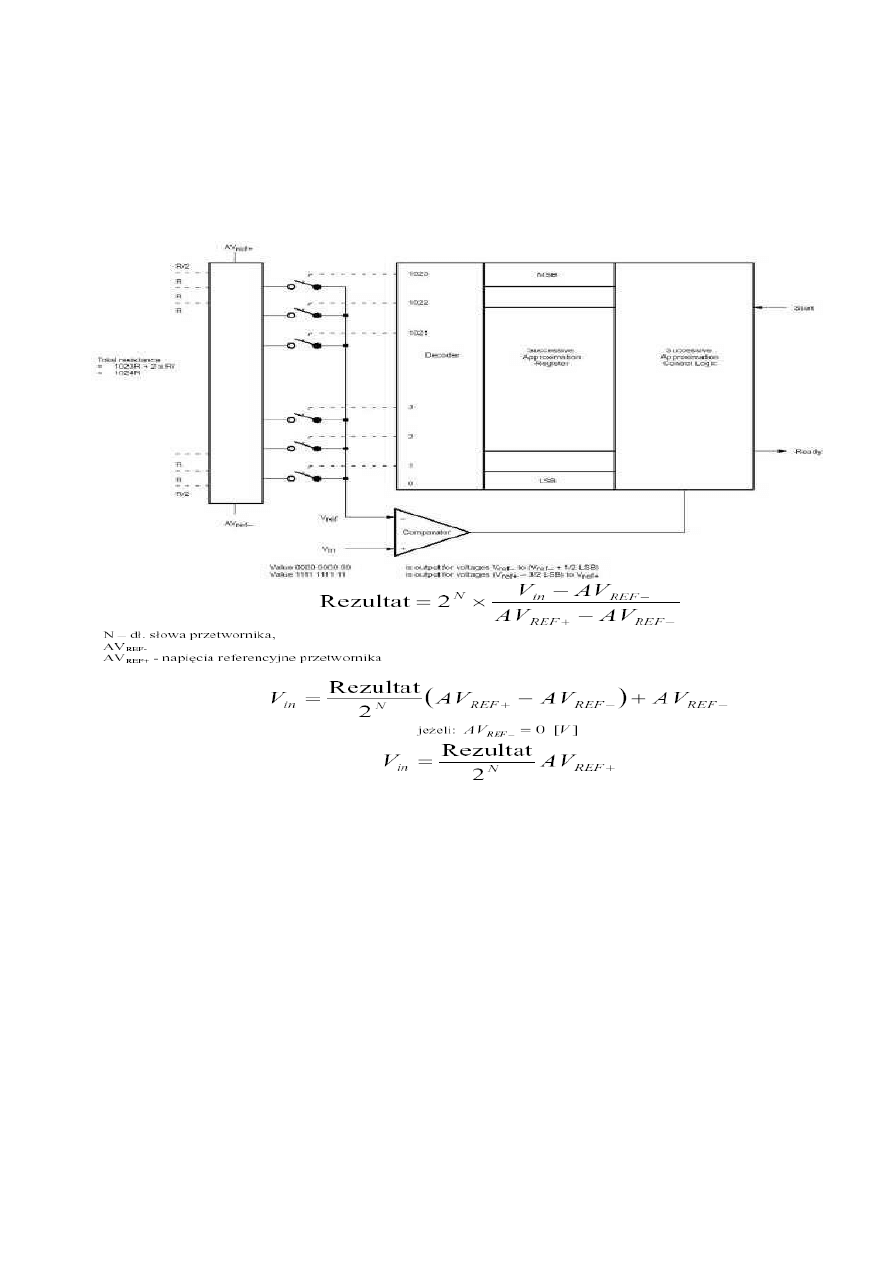
27. Opisać budowę przetworników A/C stosowanych w
mikrokontrolerach jednoukładowych M68HC11 (M6805) (układy
sterujące, rejestry aproksymacyjne,
multipleksery analogowe,
źródła napięć referencyjnych).
System A/D jest 8-kanałowym, 8-bitowym przetwornikiem z multipleksowanym wejściem,
działającym z dokładnością do najmniej znaczącego bitu. Przetwarzanie realizowane jest metodą
kompensacji wagowej. Cztery podstawowe bloki funkcjonalne przetwornika to:
multiplekser
przetwornik analogowy - kondensatory ładowane napięciem odniesienia
blok sterowania - układ porównania
4 rejestry przechowujące wynik Działanie:
Z nóżki wejściowej pobierane jest napięcie i porównywane z napięciem odniesienia w obrębie
macierzy kondensatorów. Każda konwersja A/D składa się z 8 operacji porównania, począwszy od
najbardziej znaczącego bitu. Wyniki kolejnych konwersji zapisywane są w odpowiednich rejestrach
wynikowych. Łącznie można dokonać przetworzenia 16 sygnałów analogowych: 8
wejściowych, 4 wewnętrznych punktów odniesienia i 4 rezerwy.
Cztery tryby pracy:
-4 kolejne konwersje w kanale pojedynczym
-ciągła konwersja w kanale pojedynczym
-po jednym przetwarzaniu w czterech kanałach
-ciągła konwersja w 4 kanałach
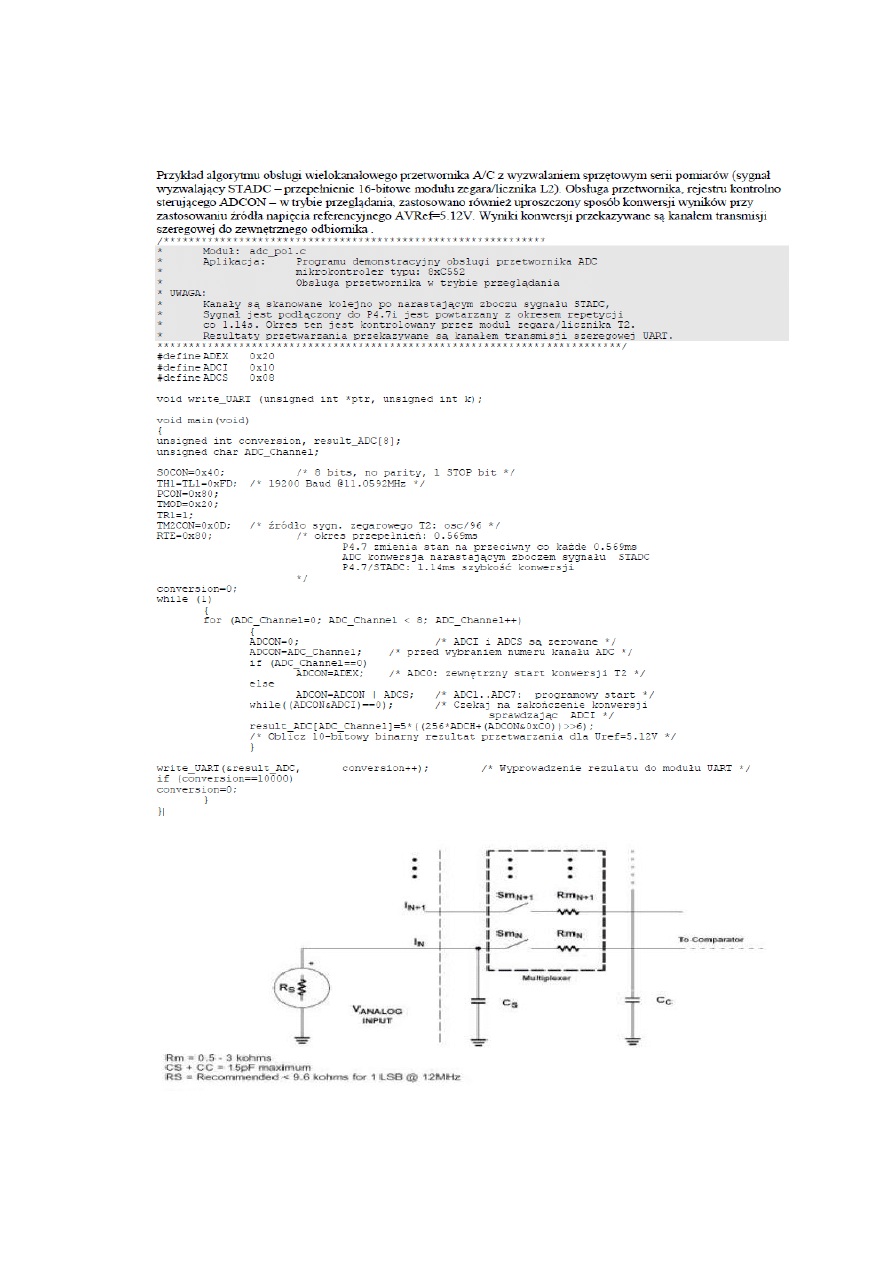
28.
Podać przykład budowy algorytmu przetwarzania numerycznego
obsługującego wielokanałowy przetworniki a/c – analiza schematu
blokowego.

29.
Omówić algorytmy konwersji wyniku binarnego przetwarzania a/c
do postaci zmiennoprzecinkowej wielkości fizycznej, gdy przetwornik
wykorzystuje zestaw napięć referencyjnych U
-REF
i U
+REF
.
To samo co wyżej +
Przykład algorytmu konwersji wyniku przetwarzania A/C przy parametrach:
Przykład uproszczonego algorytmu konwersji wyniku przetwarzania A/C (bez stosowania arytmetyki
liczb zmiennoprzecinkowych), wynik konwersji jest liczbą typu int reprezentującą wartość napięcia
wejściowego w [mV] :
30.
Opisać metody przetwarzania wielokanałowego w modułowych
systemach kontrolnopomiarowych - architektura, programowanie
31.
Charakterystyka oprogramowania narzędziowego
mikroprocesorowych systemów pomiarowych.
Zasady tworzenia aplikacji pomiarowych
Aplikacje pomiarowe powinny być tworzone tak aby ich działanie nie wpływało na wynik pomiaru.
Jeżeli w pomiarze istotną rolę odgrywa czas, to obliczenia powinny być wykonywane po dokonaniu
pomiarów związanych z czasem. Aplikacje powinny być możliwie jak najmniej skomplikowane, nie
powinny wykonywać niepotrzebnych operacji. Powinny one być także w miarę przejrzyste, aby
można było je później poprawić, lub rozbudować.
Sprzęt powinien być dobierany tak aby mógł spełniać określone wymagania, np. jeżeli aplikacja
będzie potrzebowała więcej pamięci, należałoby dołączyć pamięć zewnętrzną, podobnie jest z
układami wejścia wyjścia i przerwaniami. Jeżeli nasz układ pomiarowy nie będzie połączony z
komputerem należało by przyłączyć wyświetlacz.
32. Omówić metody wyzwalania pomiaru w typowych przetwornikach
A/C mikrokontrolerów analogowych.
Wyzwalanie pomiaru przetwornika A/C
-
wyzwalanie programowe
-
wyzwalanie sprzętowe o tryb pracy ciągły
-
wyzwalanie zewnętrznym źródłem pobudzającym (generator zewn.)
-
wyzwalanie wewnętrznym źródłem pobudzającym (generator modułu L2)
-
tryby mieszany
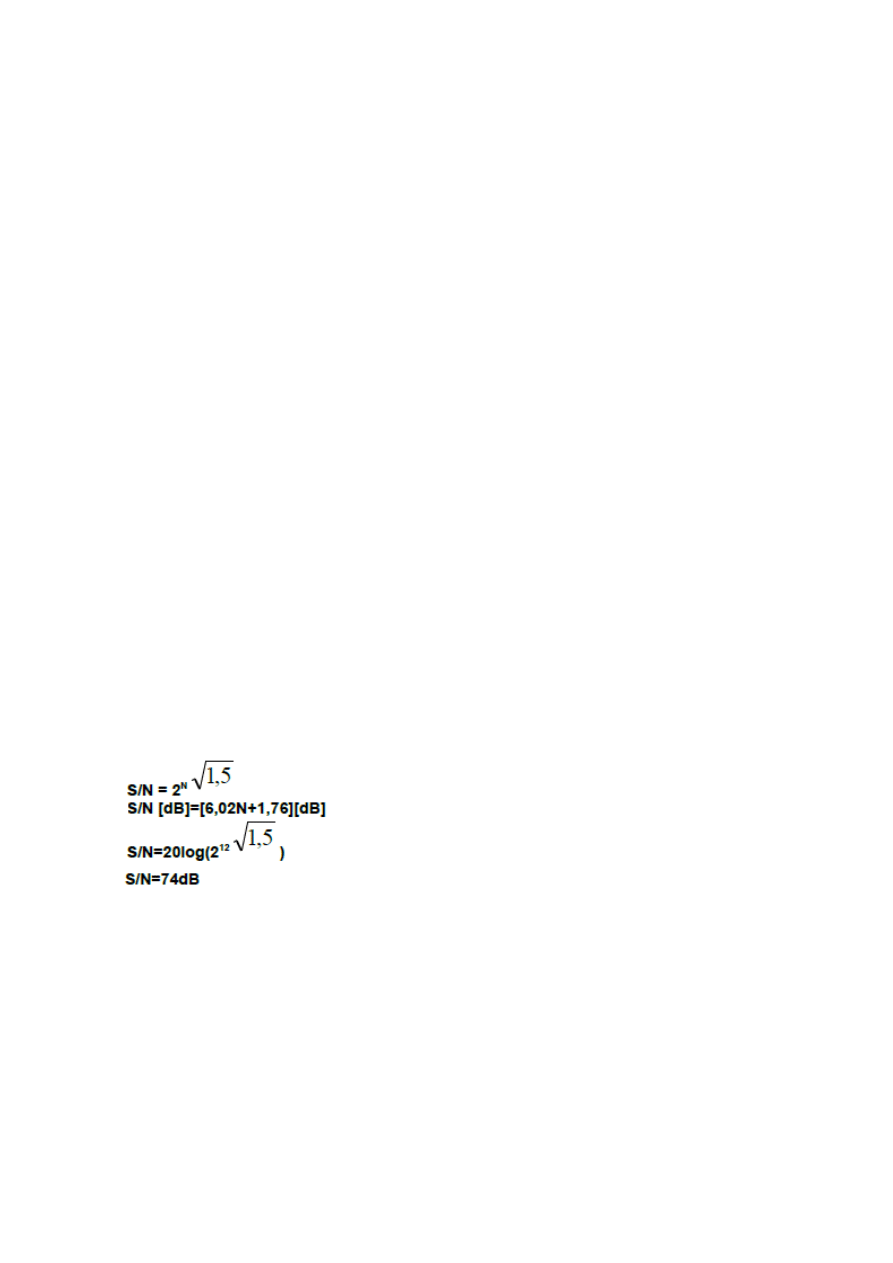
33.
W jaki sposób rozdzielczość przetwornika A/C wpływa na wartość
szumu kwantyzacji przetwornika ?
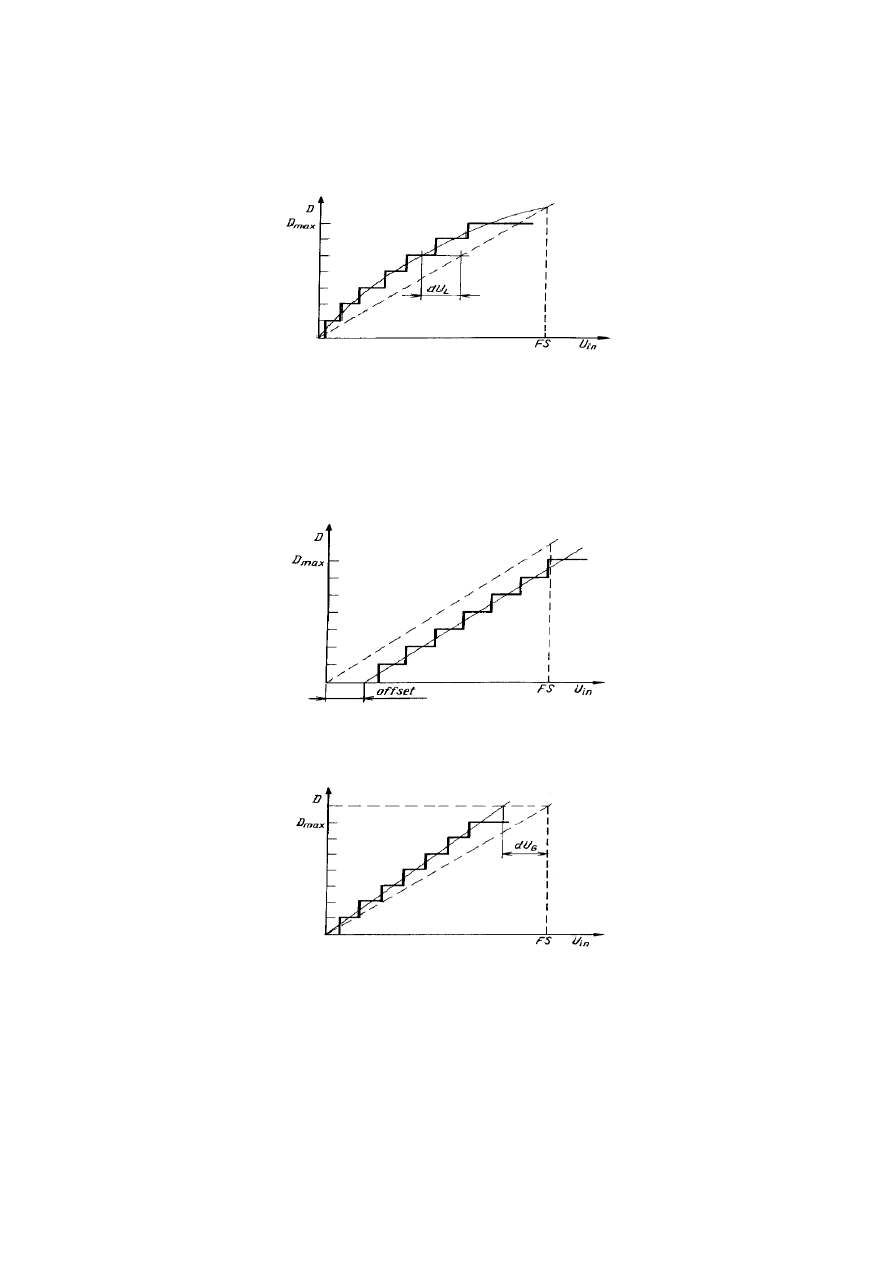
34. Przedstawić podstawowe parametry pracy przetwornika A/C.
a) Nieliniowość całkowa (ang. Integral Nonlinearity - INL) – największe odchylenie
rzeczywistej charakterystyki przetwarzania od linii prostej
b) Rozdzielczość – stosunek przedziału kwantyzacji Q do pełnego zakresu prze-
twornika FS, jest równa odwrotności liczby poziomów kwantyzacji, najczęściej określana
liczbą bitów N słowa cyfrowego
c) Dokładność przetwornika (bezwzględna lub względna) – największa różnica między
rzeczywistą a przewidywaną wartością sygnału analogowego dla danego słowa cyfrowego
d) Błąd przesunięcia (bezwzględny lub względny) – różnica między rzeczywistą a idealną
wartością sygnału analogowego dla minimalnej lub zerowej wartości cyfrowej
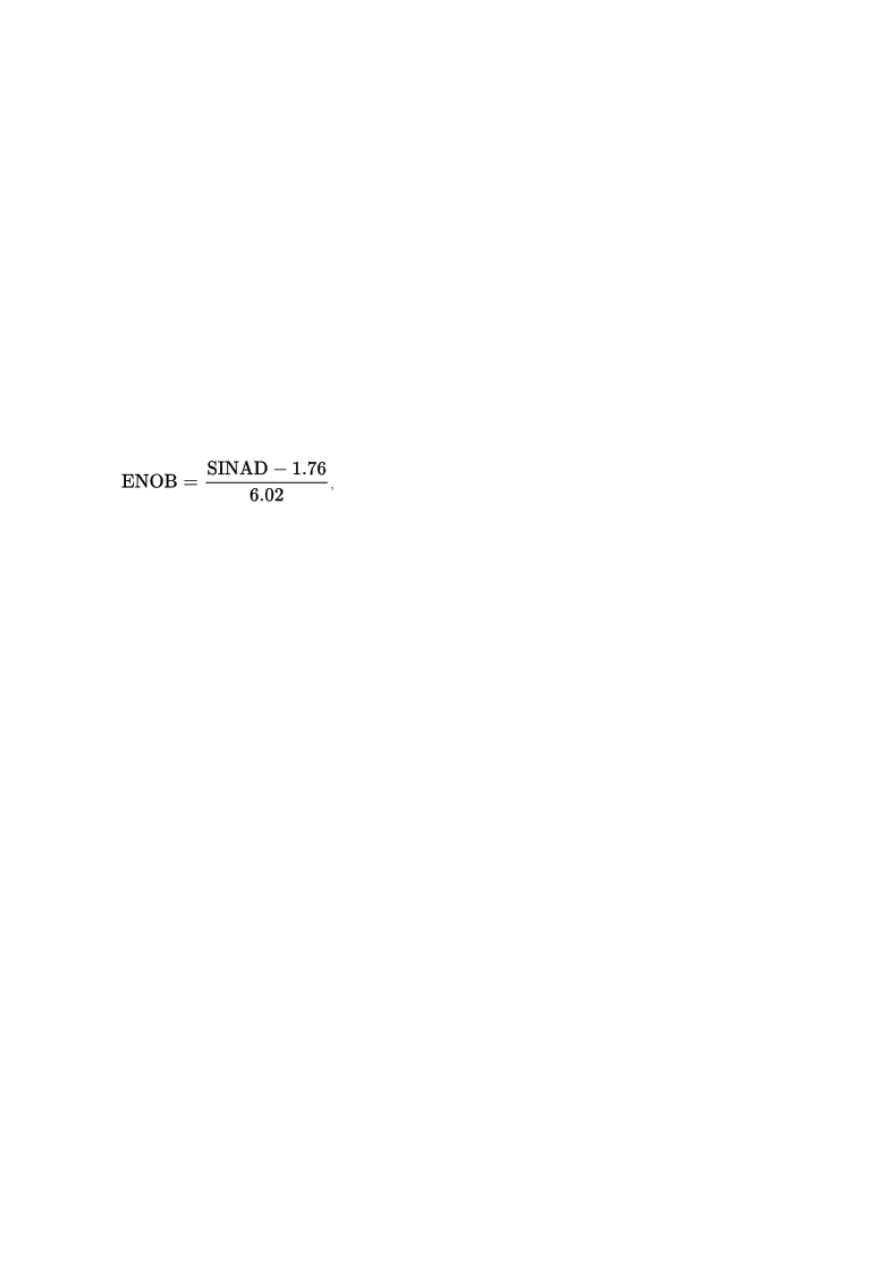
e) Błąd skalowania (wzmocnienia ang. gain error) – różnica między przewidywaną i
ekstrapolowaną wartością rzeczywistą sygnału analogowego dla pełnego zakresu
przetwornika
f) Nieliniowość różniczkowa (ang. Differencial Nonlinearity – DNL ) – charakteryzuje lokalne
odchylenia charakterystyki od linii prostej
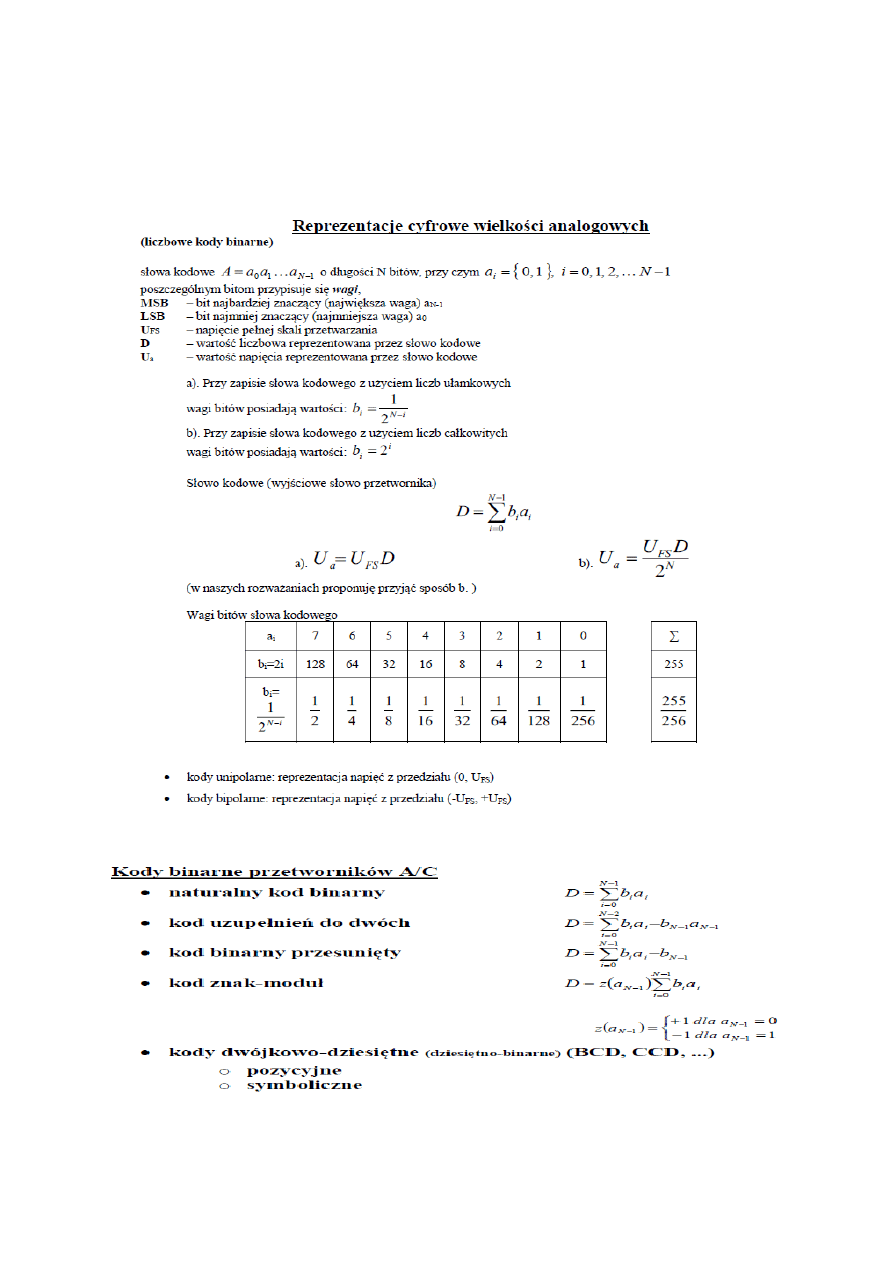
g) Czas przełączania – czas zmiany napięcia wyjściowego przetwornika od wartości
początkowej do 90% zakresu zmiany napięcia wyjściowego
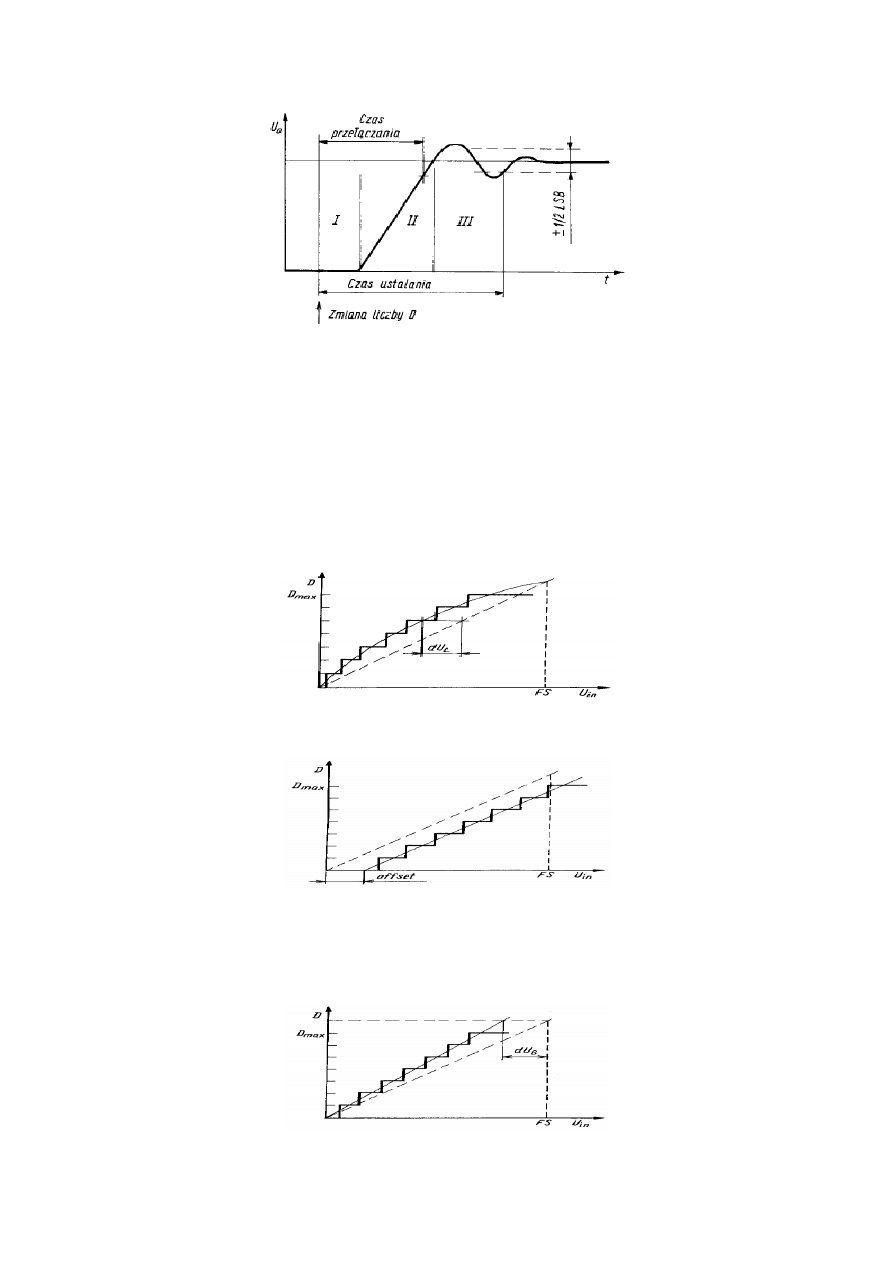
h) Maksymalna częstotliwość przetwarzania – maksymalna liczba konwersji na
sekundę, częstotliwość graniczna = 1/czas konwersji
i) Szpilki napięcia (ang. glitch) – szpilki związane z przenikaniem przez pojemności
pasożytnicze cyfrowych sygnałów przełączających klucze analogowe
35.
Omówić podstawowe błędy przetwarzania przetwornika A/C i C/A.
a) Nieliniowość całkowa (ang. Integral Nonlinearity - INL) – największe odchylenie
rzeczywistej charakterystyki przetwarzania od linii prostej
b) Błąd przesunięcia (bezwzględny lub względny) – różnica między rzeczywistą a idealną
wartością sygnału analogowego dla minimalnej lub zerowej wartości cyfrowej
c) Błąd skalowania (wzmocnienia ang. gain error) – różnica między przewidywaną i
ekstrapolowaną wartością rzeczywistą sygnału analogowego dla pełnego zakresu
przetwornika
d) Nieliniowość różniczkowa (ang. Differencial Nonlinearity – DNL ) – charakteryzuje lokalne
odchylenia charakterystyki od linii prostej
e) Czas przełączania – czas zmiany napięcia wyjściowego przetwornika od wartości
początkowej do 90% zakresu zmiany napięcia wyjściowego
36.
Efektywna rozdzielczość kodowa przetworników A/C.
Skuteczna ilość bitów (enob) jest miarą dynamicznych przetwornika analogowo-cyfrowego (ADC)
oraz związanego z nim obwody. Rozdzielczość ADC jest określona przez liczbę bitów, która
reprezentuje wartość analogową, w zasadzie podając 2N poziomy sygnału dla sygnału N-bitowej.
Jednak wszystkie obwody rzeczywistym ADC wprowadzić szumy i zniekształcenia. Enob określa
rozdzielczość idealnego obwodu ADC, które mają taką samą rozdzielczość jak obwód pod uwagę.
Enob jest również stosowany jako środek jakości dla innych bloków, takich jak wzmacniacze sample-
and-hold. W ten sposób, bloki analogowe mogą być łatwo uwzględnione w obliczeniach sygnału
łańcuchowe całkowita enob łańcucha bloków jest zwykle poniżej enob najgorszego bloku.
SINAD jest stosunek wskazujące jakość sygnału.
6,02 Termin na dzielnik konwertuje decybelach (reprezentacja log10) do bitów (reprezentacja
log2). [Uwaga 1]
Termin pochodzi od 1.76 błędu kwantyzacji w idealnym ADC. [Uwaga 2]
37.
Reprezentacje cyfrowe wielkości mierzonych – podstawowe
określenia.
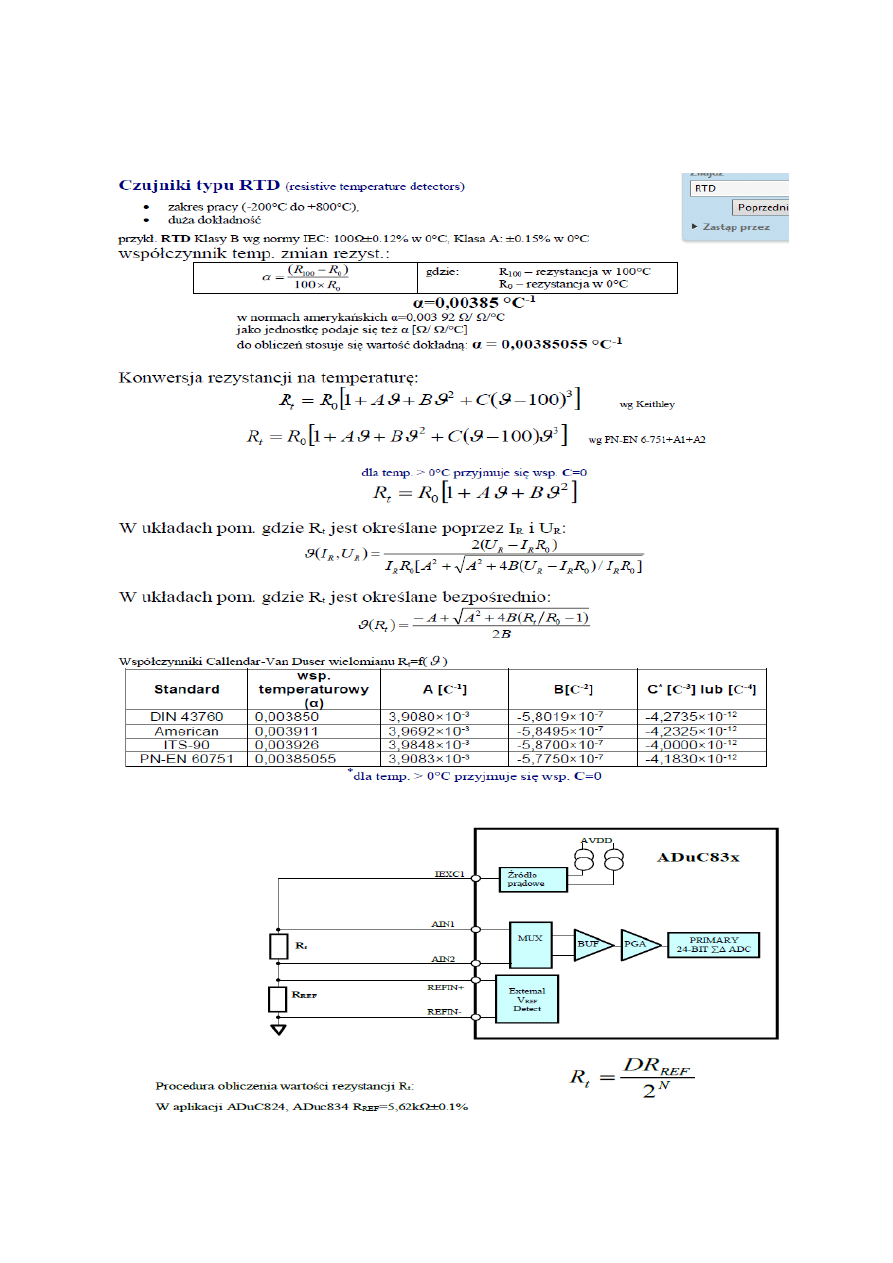
38. Scharakteryzuj zasadę pomiaru temperatury przy pomocy czujnika RTD w
układzie pomiarowym bezpośredniego pomiaru R.
39.
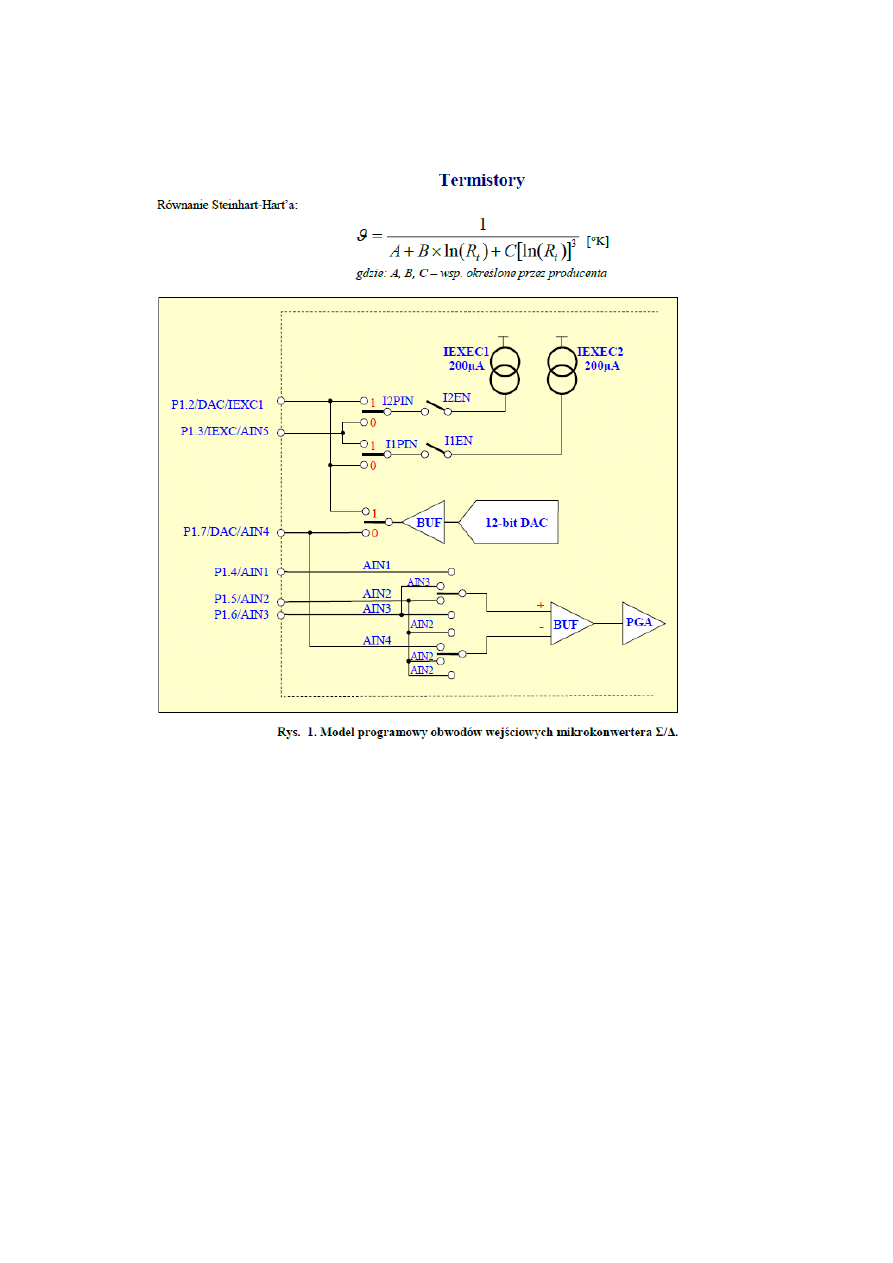
Scharakteryzuj zasadę pomiaru temperatury przy pomocy czujnika
termistorowego w układzie pomiarowym bezpośredniego pomiaru R.
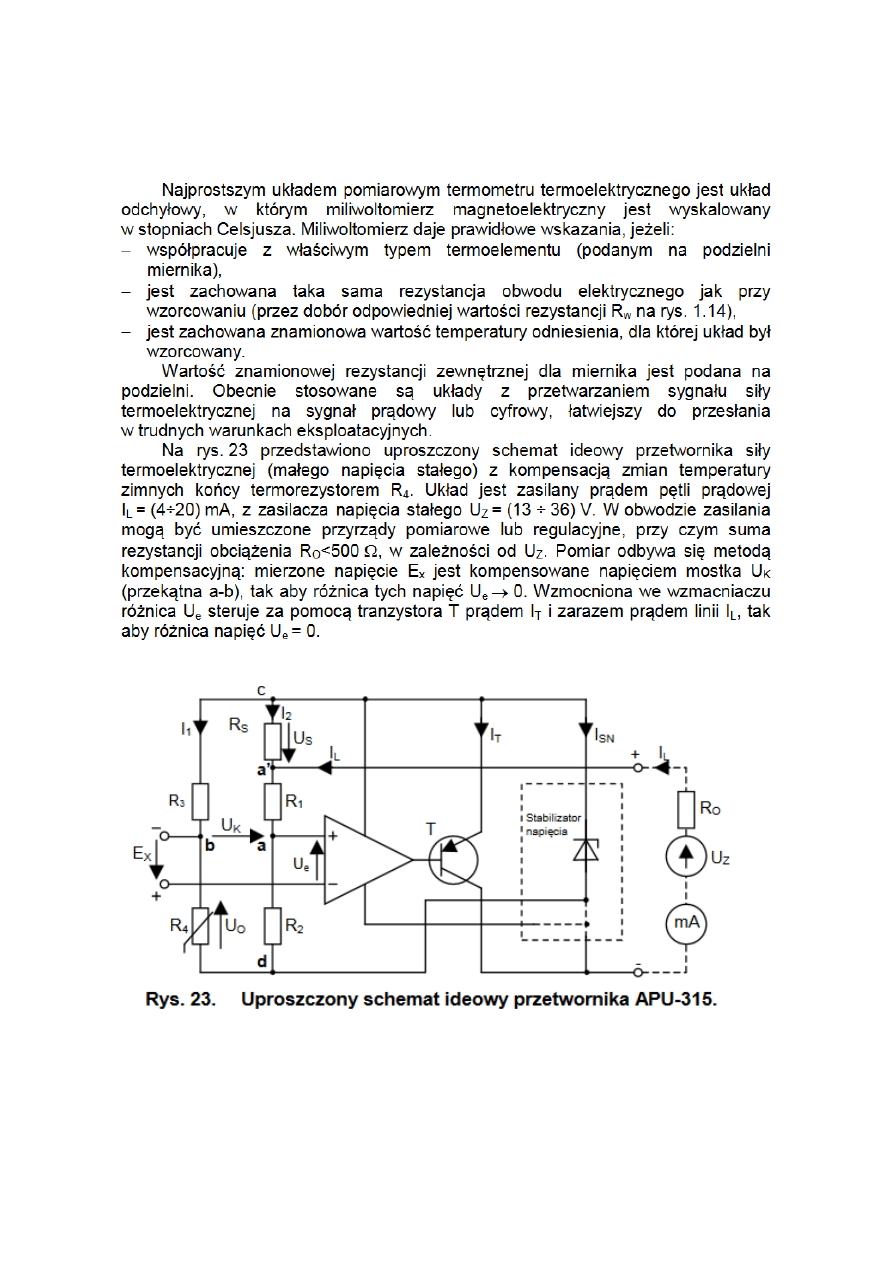
40. Scharakteryzuj podstawowe układy pomiarowe pomiaru
temperatury termoelementami w mikrosystemach analogowych.
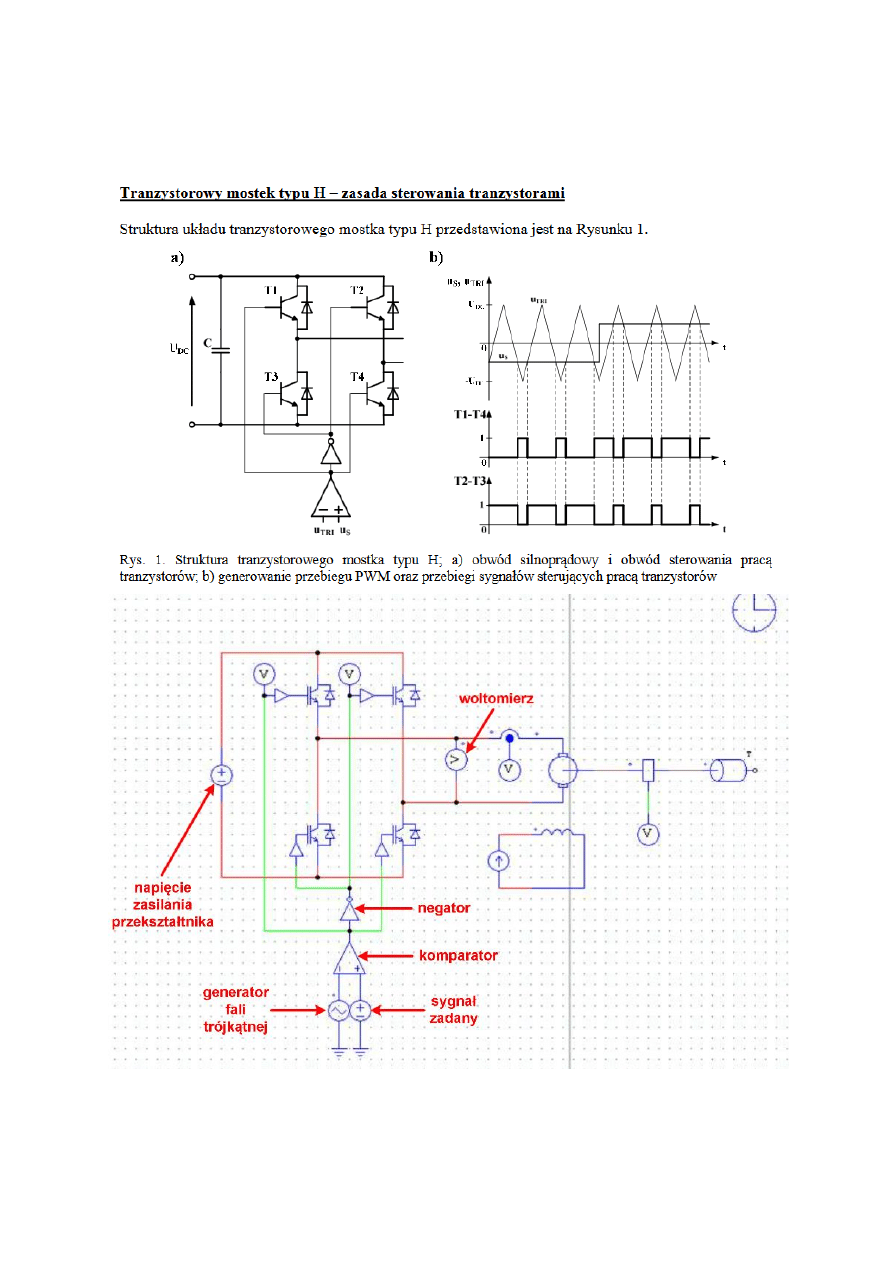
41. Opisz podstawowy
układ sterowania silnika prądu stałego metodą
impulsową w układzie H z pomiarem prądu i pomiarem prędkości
obrotowej.
42.
Przedstawić procedury numerycznych konwersji binarnego
wyniku przetwarzania A/C temperatury czujnika, wiedząc, że
U
REF
=2.5V a stałe czujnika temperatury U(25 C)=600mV,
U/
T=
3mV/
C, a wartość binarna wyniku przetwarzania
W
bin
=3D5
HEX
. Określić temperaturę czujnika.
Uref=2,5mV
U(25)=600mV
dU/dT=-3mV/C
Wbin=3D5hex
Wdec=982
T=25(600-Wdec)/3
T=25(600-981)/3=-102
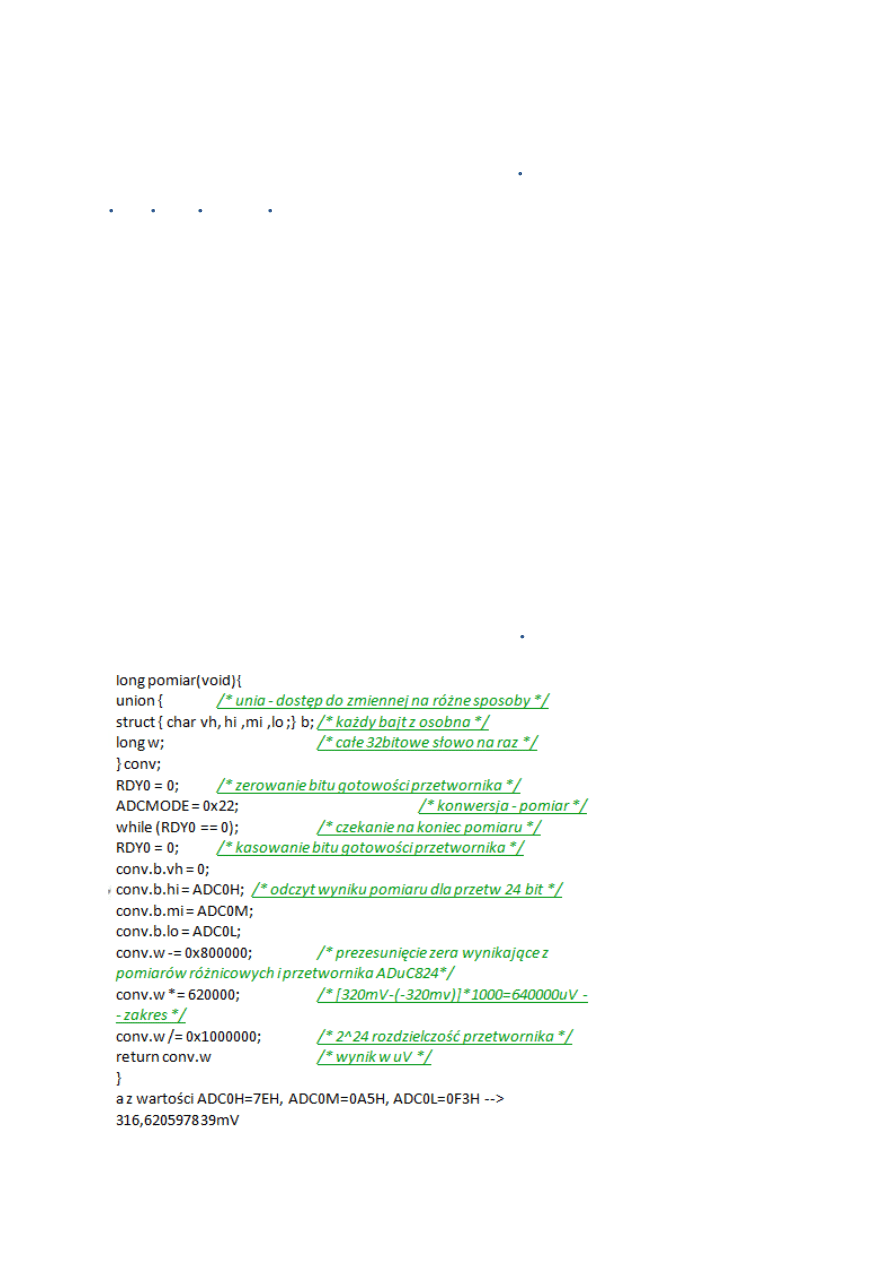
43.
Przedstawić algorytm konwersji numerycznej binarnego wyniku
przetwarzania A/C mikrokonwertera ADuC824 na wartość napięcia
reprezentowaną 32bitową reprezentacją całkowitoliczbową (long int),
napięciowego sygnału różnicowego podanego na wejścia AIN3-AIN4,
dla 24 bitowego słowa o wartościach: ADC0H=7E
H
, ADC0M=0A5
H
,
ADC0L=0F3
H
(kod binarny przesunięty) przy założeniu, że V
REF
= 2.5 V,
a zakres
napięć wejściowych przetwornika 320mV.
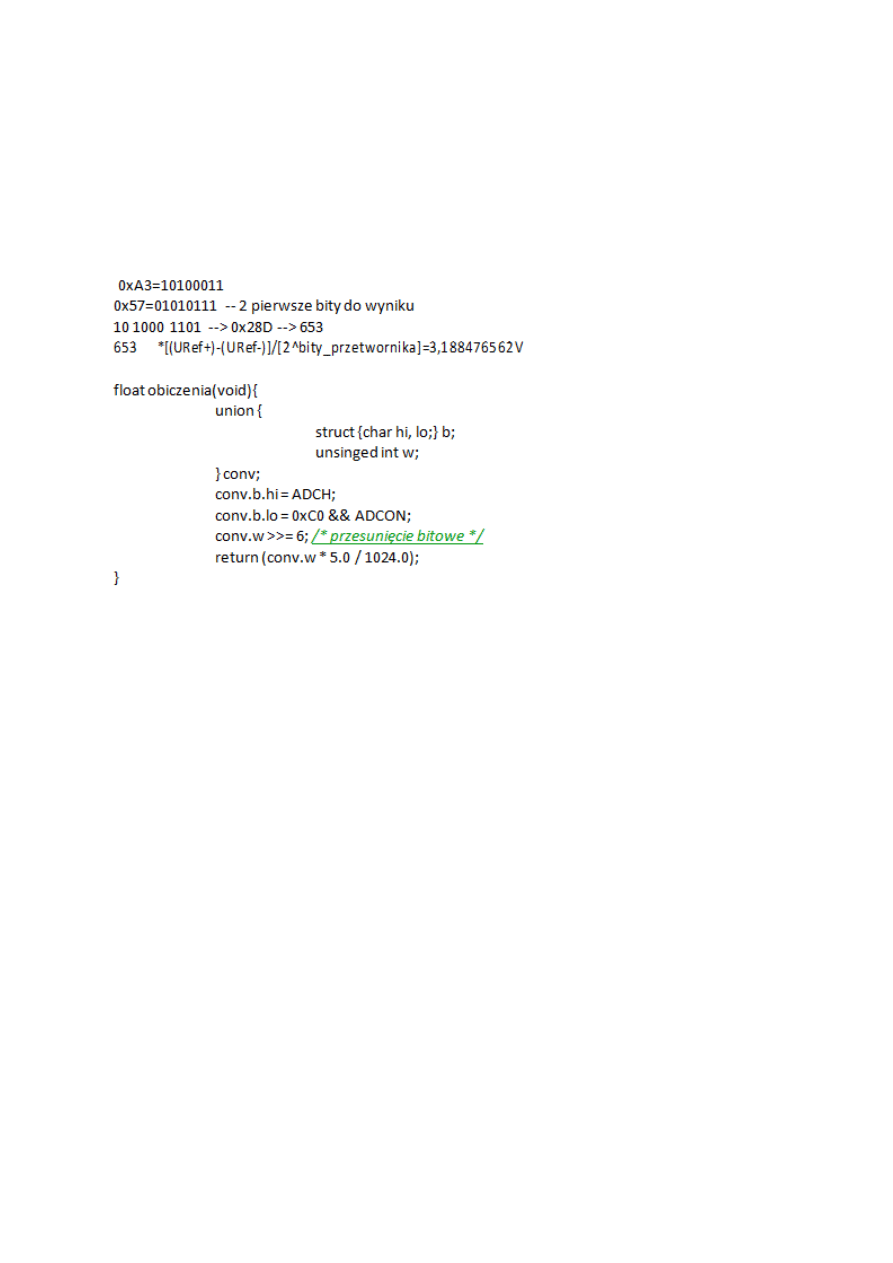
44.
Określ wartość U
x
napięcia sygnału pomiarowego uzyskanego z 10-
bitowego przetwor
nika A/C przekazującego część starszą wyniku w
rejestrze ADCH=0xA3 oraz cześć młodszą wyniku w rejestrze
ADCON=0x57 wiedz
ąc, że 2 najmłodsze bity wyniku znajdują się na
pozycjach b7 i b6 słowa ADCON. Napięcie referencyjne przetwornika
U
Ref+
=5V a U
Ref-
=0V
. Zapisz algorytm obliczeń w języku programowania
C.
45.
Podczas rejestracji sygnału analogowego w przedziale obserwacji
T=1s bipolarnym 12-bitowym przetwornikiem A/C (U
REF
=1.25V)
zarejestrowano minimalną i maksymalną wartość sygnału,
odpowiednio D
min
=0053
hex
oraz D
max
=08A1
hex
. Określ wartość napięcia
międzyszczytowego w przedziale obserwacji sygnału. Przetwornik
pracuje w kodzie binarnym przesuniętym.
Umin=(0x53-0x800)*2*1.25/(2^12)=-1,19934082V Umax=(0x8A1-
0x800)*2*1.25/(2^12)=0,098266602V
Różnica to napięcie międzyszczytowe czyli 1,19934082V
46.
Określ wartość temperatury czujnika mikrokonwertera ADuC812
na podstawie pojedynczego binarnego wyniku przetwarzania X
i
=0x83BA
,
przyjmując parametry: U
REF-
=0V, U
REF+
=2.5V
, stała czujnika
temperatury U
25
C
=600mV,
U/
T= 3mV/
C.
mały chaczyk przetwornik ADuC812 jest 12 bitowy dlatego do obliczeń Xi=0x03BA
Ux=X*(Uref+ - Uref-)/LX
X -- wartość z przetwornika A/C
Uref(+/-) -- napięcia referencyjne
LX -- liczba możliwych stanów przetwornika czyli 2 do potęgi rozdzielczości przetwornika
ADuC812 - przetwornik 12 bitowy
UWAGA: ADuC812 jest 12-bitowy ale w rejestrach wynikowych sprzedaje również informacje
o numerze przetwarzanego kanału. Chodzi o tą 8-kę z
przodu.
Tx=Tn+(Ux-Un)/Kn
Wzór wynika z funkcji liniowej gdzie mamy jeden punkt i współczynnik kierunkowy.
Tn -- z podanych informacji o czujniku temperatura 25°C
Un -- ==||== napięcie w temperaturze 25st czyli
600mV = 0,6V
Kn -- podany parametr kierunkowy charakterystyki czujnika DU/DT=-3mV/
Ux=0,022788V
Tx=217,404st
47. Okre
śl średnią wartość temperatury czujnika mikrokonwertera
ADuC812 na podstawie
binarnych wyników przetwarzania, przyjmując
parametry: U
REF-
=0V, U
REF+
=2.5V
, stała czujnika temperatury
U
25
C
=630mV,
U/
T= -3mV/
C
, kanał pomiarowy M=8, kolejne
wartości binarne wyników przetwarzania (wraz z numerem kanału)
X
i
=840D
HEX
, X
i+1
=8409
HEX
, X
i+2
=8411
HEX
.
TAK JAK POWYŻEJ dochodzi tylko średnia ale to jest proste
Ux=X*(Uref+ - Uref-)/LX
X -- wartość z przetwornika A/C
Uref(+/-) -- napięcia referencyjne
LX -- liczba możliwych stanów przetwornika czyli 2 do potęgi rozdzielczości przetwornika
ADuC812 - przetwornik 12 bitowy
UWAGA: ADuC812 jest 12-bitowy ale w rejestrach wynikowych sprzedaje również informacje o
numerze przetwarzanego kanału. Chodzi o tą 8-kę z przodu.
Tx=Tn+(Ux-Un)/Kn
Wzór wynika z funkcji liniowej gdzie mamy jeden punkt i współczynnik kierunkowy.
Tn -- z podanych informacji o czujniku temperatura
25°C
Un -- ==||== napięcie w temperaturze 25st czyli
630mV = 0,63V
Kn -- podany parametr kierunkowy charakterystyki czujnika DU/DT=-3mV/
Xi=40D(hex)
Xi=1037
Ui=0,63293457V
Ti=24,021809896°C
Xi+1=409(hex)Xi+1=1033 Ui+1=0,630493164V Ti+1=24,835611979°C
Xi+2=411(hex)Xi+1=1041 Ui+2=0,635375977V Ti+2=23,208007813°C
T(śtednia)=([Ti]+[Ti+1]+[Ti+2])/3 T(średnia)=24,021809896°C

48. W jakim kanale pomiarowym, 12-bitowego przetwornika A/C
mikrokontrolera ADuC831, zmierzono maksymalną wartość napięcia
(
X
max
) z szeregu 3 wartości, przyjmując parametry: U
REF
=2.5V oraz
kolejne wartości binarne wyników
przetwarzania X
i
=340D
HEX
,
X
i+1
=5409
HEX
, X
i+2
=1411
HEX
.
Dla mikrokonwertera AduC812 zachodzą następujące zależności:
Fsys=11059200Hz
Tosc=12/Fosc -> 1.085us
Tprób = 2 * T2 =2*(Dz*1.085us)
Przy czym dzielnik Dz jest liczbą naturalną, a więc stąd wynikają błędy przy doborze częstotliwości
próbkowania. Dla naszego przypadku mamy:
fprób=1/Tprób=1/(2*(Dz*1.085us))
stąd
Dz=1/(2*(fprób*1.085us))=14,4
Czyli dobieramy za Dz=143. Teraz należy sprawdzić jaką w rzeczywistości uzyskaliśmy w ten sposób
częstotliwość próbkowania i porównać ją z zakładaną:
fprób[143]=1/(2*(14*1.085us))=32916.39 Hz
Czyli błąd względny doboru częstotliwości wynosi:
delfprób=(fprób[14]- fprób)/ fprób=(32916,39- 32000)/32000=0,02286%
49.
Określić względny błąd doboru częstotliwości próbkowania f
prb
=
32000Hz wykorzystu
jąc wewnętrzne układy dzielników częstotliwości
(licznik L2) dla mikrokonwertera ADuC812 (f
sys
=11059200Hz).
???
50. Podaj binarną wartość kodu sterującego 12-bitowego
unipolarnego przetwornika C/A aby na wyjściu uzyskać napięcie
1.55V. Napięcie referencyjne przetwornika
UREF=2.5V.
1.55/2.5*(2^12)=2539,52 -->100111101011(binarnie)

51.
Określ maks. częstotliwość sygnału wejściowego f
max
M-
kanałowego
systemu akwizycji danych pomiarowych bez układu PP przy założeniu
t
konw
=20
μs, a rozdzielczość przetwornika A/C N=12bit i dokładności
przetwarzania 1LSB. Jaka jest maksymalna częstotliwość próbkowania
przy sekwencyjnym multipleksowaniu M=16 kanałów pomiarowych.
Fmax(jednego kanału)= 1/tkonw=50kHz
Fmax(16-u kanałów)=Fmax(jednego kanału)/16=3125
52. Podczas rejestracji sygnału analogowego w przedziale obserwacji T=1s
unipolarnym 12-bitowym przetwornikiem A/C (U
REF
=1.25V) zarejestrowano
minimalną i maksymalną wartość sygnału, odpowiednio D
min
=0053
hex
oraz
D
max
=07A1
hex
. Określ wartość napięcia międzyszczytowego w przedziale
obserwacji sygnału. Przetwornik pracuje w naturalnym kodzie binarnym.
Umin=(0x53-0x800)*2*1.25/(2^12)=-1,19934082V Umax=(0x8A1-
0x800)*2*1.25/(2^12)=0,098266602V
Różnica to napięcię międzyszczytowe czyli 1,19934082V
53.
Podczas rejestracji sygnału analogowego w przedziale obserwacji
T=100ms unipolarnym 13-bitowym przetwornikiem A/C (U
REF
=2.5V)
zar
ejestrowano minimalną i maksymalną wartość sygnału,
odpowiednio D
min
=00C8
hex
oraz D
max
=1388
hex
. Określ wartość napięcia
międzyszczytowego w przedziale obserwacji sygnału. Przetwornik
pracuje w naturalnym kodzie binarnym.
???

54. W systemie pomiarowym zmierzono kolejno wartości napięcia
U
1
=0.25V, U
2
=4.5V i U
3
=-1.75V. Przedstaw binarną postać wyników
pomiarów w kodzie U2, binarnym przesuniętym
i w kodzie znak-moduł
dla przetwornika bipolarnego N=14 o zakresie przetwa
rzania
U
FS
=5V. (𝑧𝑛𝑎𝑘: 𝑎
13
= 0 →
𝑧 = +1)
Szukane:
Dane: Ufs=5V, N=14, W=0.25
wzór:
W=(Ufs*D*2)/(2^N) dla bipolarnego przetwornika
W=(Ufs*D)/(2^N) dla unipolarnego przetwornika
po przeksztalceniu:
D=(W*2^N)/2*Ufs=(0.25*2^14)/(2*5)=410
410=110011010B
i teraz zaminiamy na oszczegolne kodowanie
U2: 00 0000 0110 0110
Binarny przesunięty: 01 0001 1001 1010
Znak-modul: 00 0001 1001 1010
55. Podcza
s rejestracji sygnału analogowego w przedziale obserwacji
T=1s unipolarnym 14-bitowym przetwornikiem A/C (U
REF
=1.25V)
zarejestrowano minimalną i maksymalną wartość sygnału,
odpowiednio D
min
=0258
hex
oraz D
max
=2EE0
hex
. Określ wartość napięcia
międzyszczytowego w przedziale obserwacji sygnału. Przetwornik
pracuje w naturalnym kodzie binarnym.
???
56.
W systemie pomiarowym zmierzono kolejno wartości napięcia
U
1
=0.35V, U
2
=5.5V i U
3
=-
2.75V. Przedstaw binarną postać wyników
pomiarów w kodzie U2, binarnym przesuniętym i w kodzie znak-moduł
dla przetwornika bipolarnego N=13 o zakresie przetwarzania U
FS
=5V.
(
𝑧𝑛𝑎𝑘: 𝑎
12
= 0 →
𝑧 = −1)
???

57.
Wyznacz 3 kolejne adresy generowane w układzie DAG procesora
sygnałowego, jeżeli: adres bazowy rejestru cyklicznego B=1000
HEX
,
długość bufora cyklicznego L=0040
HEX
, modyfikator adresu M=0001
HEX
a
bieżący adres A=103E
HEX
.
???
58.
Wyznacz 3 kolejne adresy generowane w układzie DAG procesora
sygnałowego, jeżeli: adres bazowy rejestru cyklicznego B=1000
HEX
,
długość bufora cyklicznego L=0020
HEX
, modyfikator adresu M=3FFF
HEX
a
bieżący adres A=1002
HEX
.
???
Wyszukiwarka
Podobne podstrony:
ŚCIĄGA NA TEL
ŚCIĄGA NA TEL
sciaga moja na tel, WIP zarządzanie i inżynieria produkcji, sesja 1, ekonomia
Jak ściągać na maturze
ściaga na filozofie, filozoficzne i etyczne cośtam
ściąga na ekonomie, Budownictwo, 2 semestr
Pytania-z-egzaminu-z-czwartorzedu-sciaga-na-dlugopis, Studia, Czwartorzęd
Technologia remediacji druga ściąga na 2 koło całość, Studia, Ochrona środowiska
Moja zajebista ściąga na urządzenia Węgierka
ŚCIĄGA NA EGZAMIN rozród
Ściąga na drugie koło z wykładów
ściąga na biochemie na egzamin
więcej podobnych podstron