
PODSTAWY ROBOTYKI
JW 22.1
Sztuczne mięśnie
Wiadomości wprowadzające

Każdy z nas widział już jakieś urządzenie, które zastępuję ludzkie mięśnie i wszyscy wiemy,
że nie sposób jest przecenić użyteczności tych urządzeń w dzisiejszym świecie. Oto kilka
przykładów. Pierwszy z nich widoczny jest na rys. 1.
Rys. 1. Cztery plastikowe taśmy podnoszą skałkę
Widać na nim, jak prosty manipulator zaciska swoje cztery plastikowe taśmy, aby
pochwycić i podnieść twardą skałkę. Zastosowanie takiego urządzenia jest bardzo przejrzyste.
Podniesie przedmiot, którego z jakiegoś powodu nie podniesie człowiek np. wysoka
temperatura, szkodliwe czynniki. Ale co zrobić w przypadku, gdy podnieść trzeba przedmiot,
bądź materiał, który jest bardzo kruchy np. próbkę jakiejś ważnej skałki? Takie urządzenie
zgniecie jakże cenny materiał laboratoryjny. Zastosowanie takiego manipulatora jest więc
ograniczone. Użyć go możemy do przedmiotów, co do których jesteśmy pewni, że nie ulegną
zniszczeniu, w wyniku przyłożenia do nich siły. Rozwiązaniem tego problemu może być
ramię robota pokazane na rys. 2.
Rys. 2. Chwytanie elementu z „czuciem”
Hiszpańscy naukowcy wynaleźli palce robota, które posiadają zmysł dotyku. A to przez
zastosowaniu polimeru, dzięki któremu możliwe jest stwierdzenie wagi podnoszonego
przedmiotu i zastosowanie do złapania go odpowiedniej siły. Jest to podobne, do sposobu w
jaki człowiek posługuje się zmysłem dotyku. Jeżeli podnosimy delikatny przedmiot np. kwiat,
końce naszych palców zaciskają się na nim delikatnie, i przeniesienie takiego przedmiotu nie
wymaga od nas wielkiej siły ani skupienia. Instynktownie używamy więcej siły, gdy
trzymamy bądź przenosimy cięższy przedmiot, gdyż występuje reakcja pomiędzy naszym
czuciem, a mięśniami. Wiadomo jednak, że przedmioty ciężkie również mogą być kruche i w
takim przypadku urządzenie się nie sprawdzi. Niestety trzeba zostawić tą zagwostkę
naukowcom, którzy nadal udoskonalają swój produkt.
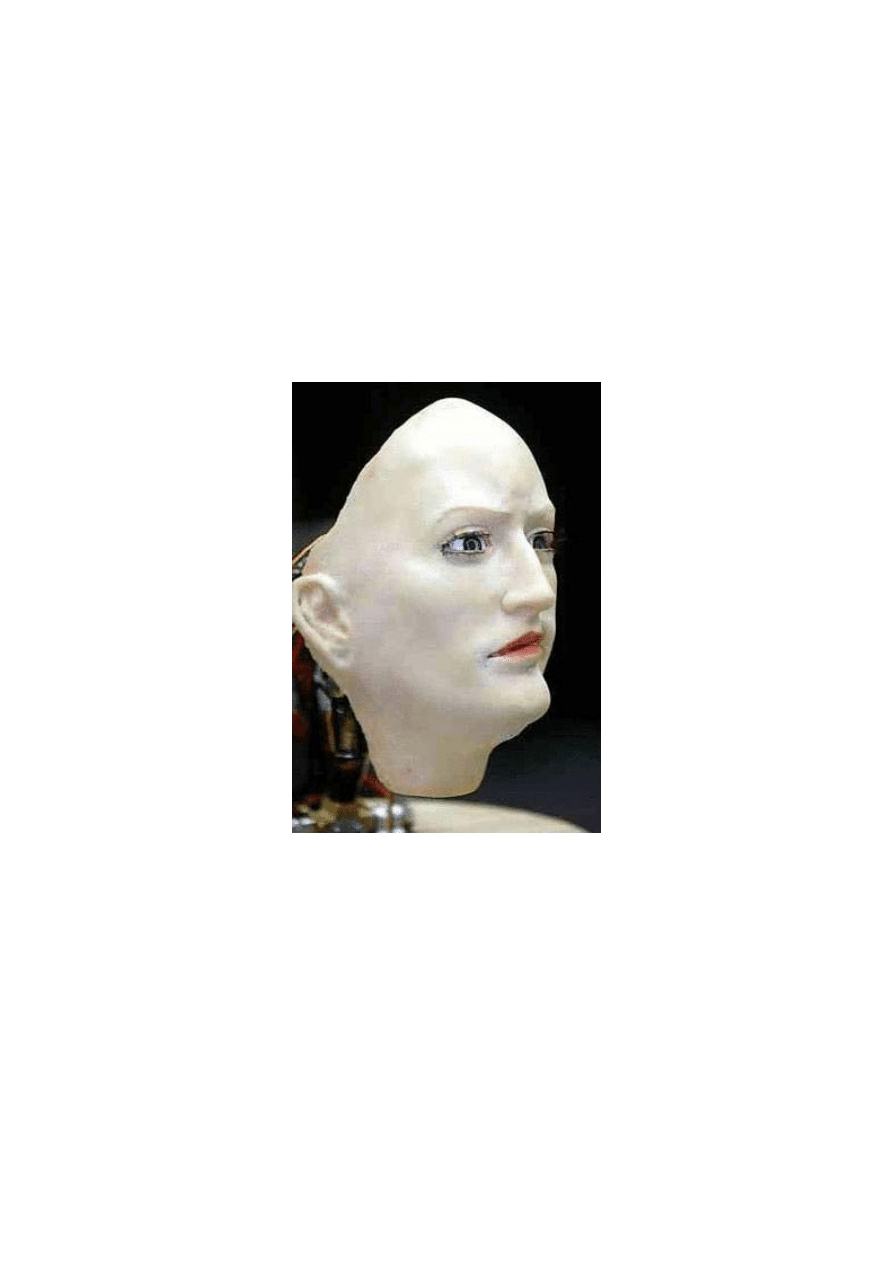
Ciekawy pomysł zastosowania siłowników do imitacji mięśni ludzkich przedstawili
japońscy naukowcy. Pokaz ten uświetniła zakończenie zjazdu AAAS. Zaprezentowano robota
(rys. 3), który - według zapewnień twórcy, Davida Hanson’a z Uniwersytetu Teksasu w
Dallas - wyraża pełen repertuar ekspresji ludzkiej twarzy.
Rys. 3. K- bot – dzieło Davida Hanson’a
Po co komu robot strojący miny? Głównie do badań sztucznej inteligencji, a ściślej
"systemów inteligencji adaptacyjnej, które umieją rozpoznawać ludzi i na nich reagować" -
wyjaśnia Hanson. Dzięki kamerom ukrytym za szklanymi tęczówkami potrafi rozpoznawać
ludzkie reakcje i kwitować je stosownym wyrazem twarzy. To o wiele więcej niż jego
poprzednik - android Andy, którego repertuar ograniczał się do ledwie czterech grymasów
twarzy. Twórca "wyrzeźbił" twarz K- bota z opracowanego przez siebie polimeru -
kombinacji elastomeru oraz pianki - dającego złudzenie (tak w wyglądzie, jak i w dotyku)
żywej ludzkiej skóry. Jej ruchami zawiadują 24 sztuczne mięśnie. Całość - twarz, mięśnie i
silniczki - waży dwa kilogramy. Koszt wykonania zamknął się w kwocie 400 USD i byłby o
wiele niższy, gdyby doszło do masowej produkcji.
Ale naukowcy pracują nie tylko po to, żeby tworzyć rzeczy, które służą do rozrywki,
czy dla przemysłu. Przekładem tego może być urządzenie zaprezentowane na rys. 4.
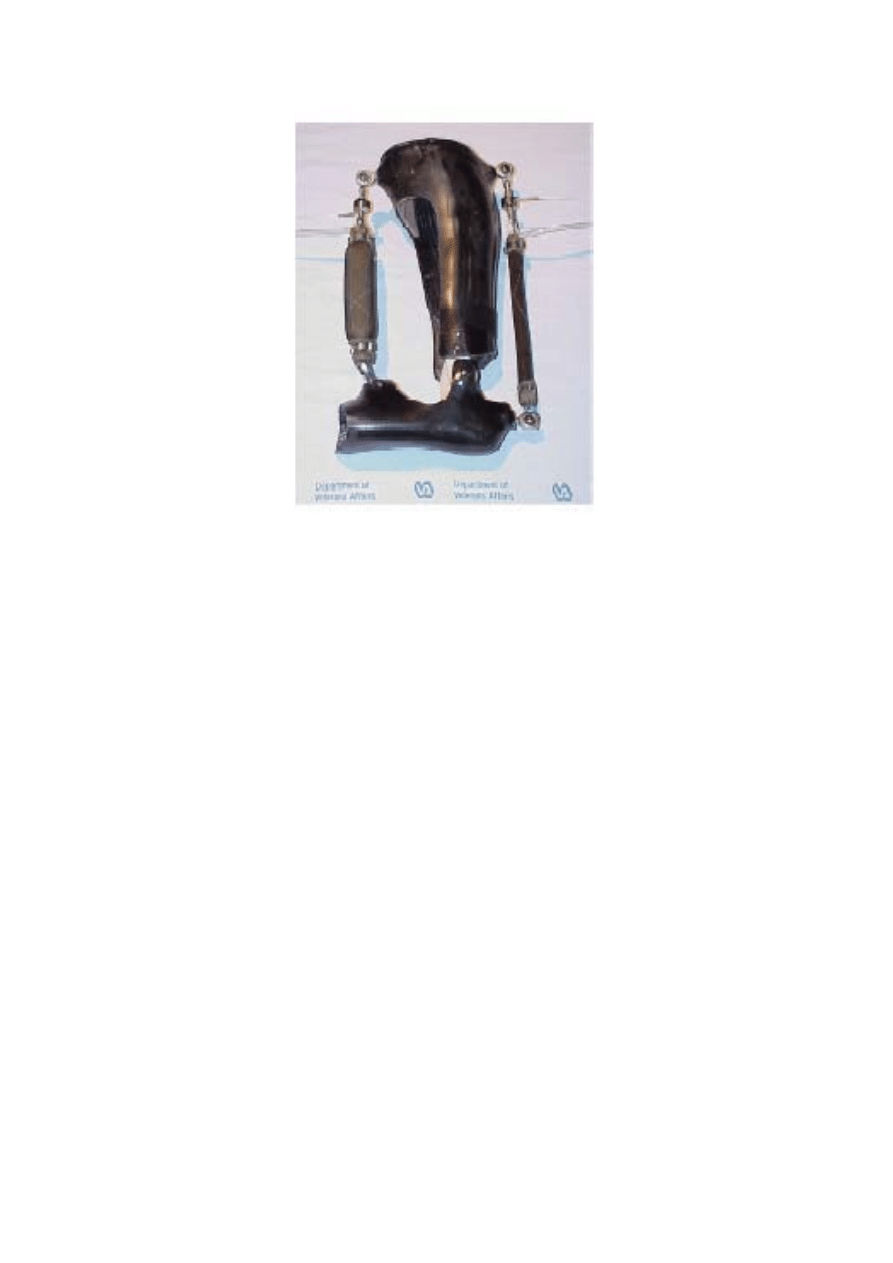
Rys. 4. Inteligentna proteza ortopedyczna
Jest grupa ludzi, którzy w wyniku różnych wypadków, czy innych komplikacji
życiowych jest pozbawiona kończyny lub jej części. Kiedyś byli oni skazani na życie w
kalectwie, a dziś istnieją takie protezy jak na zdjęciu. Jest to cześć nogi – łydka ze stopą, która
pozwala człowiekowi pozbawionemu tej części kończyny poruszać się normalnie. Dwa
pneumatyczne mięśnie firmy McKibben doczepione są do stopy za pomocą zawiasów.
Zasilane są one z baterii umieszczonych w tylniej części stopy. Specjalna konstrukcja
pozwala utrzymywać równowagę i zapewnia w czasie ruchu przyczepność do podłoża, co jest
możliwe dzięki współpracy obu siłowników. Należy dodać, iż, pomimo że siłownik taki waży
ok. 350 g może być użyty do protezy dla dorosłego, nawet solidnie zbudowanego człowieka.
Specjalne niklowo kadmowe akumulatory, ważące ok. 210 g wystarczają na ok. dwa tygodnie
działania, a wymiana ich nie nastręcza użytkownikowi większych trudności niż wymiana
baterii w walkmanie. Być może więc za parę lat nie zobaczymy już człowieka bez kończyny,
bo nawet nie zorientujemy się, iż dziarsko przed nami kroczący człowiek jeszcze jakiś czas
temu nie miał nogi. Chwilowo jednak takie protezy są bardzo drogie, i niewielu ludzi stać na
takie urządzenie. Jednak w przyszłości, – kto wie? Podobnym przykładem zdaje się być
fotografia, która zaprezentowana jest na rys. 5.
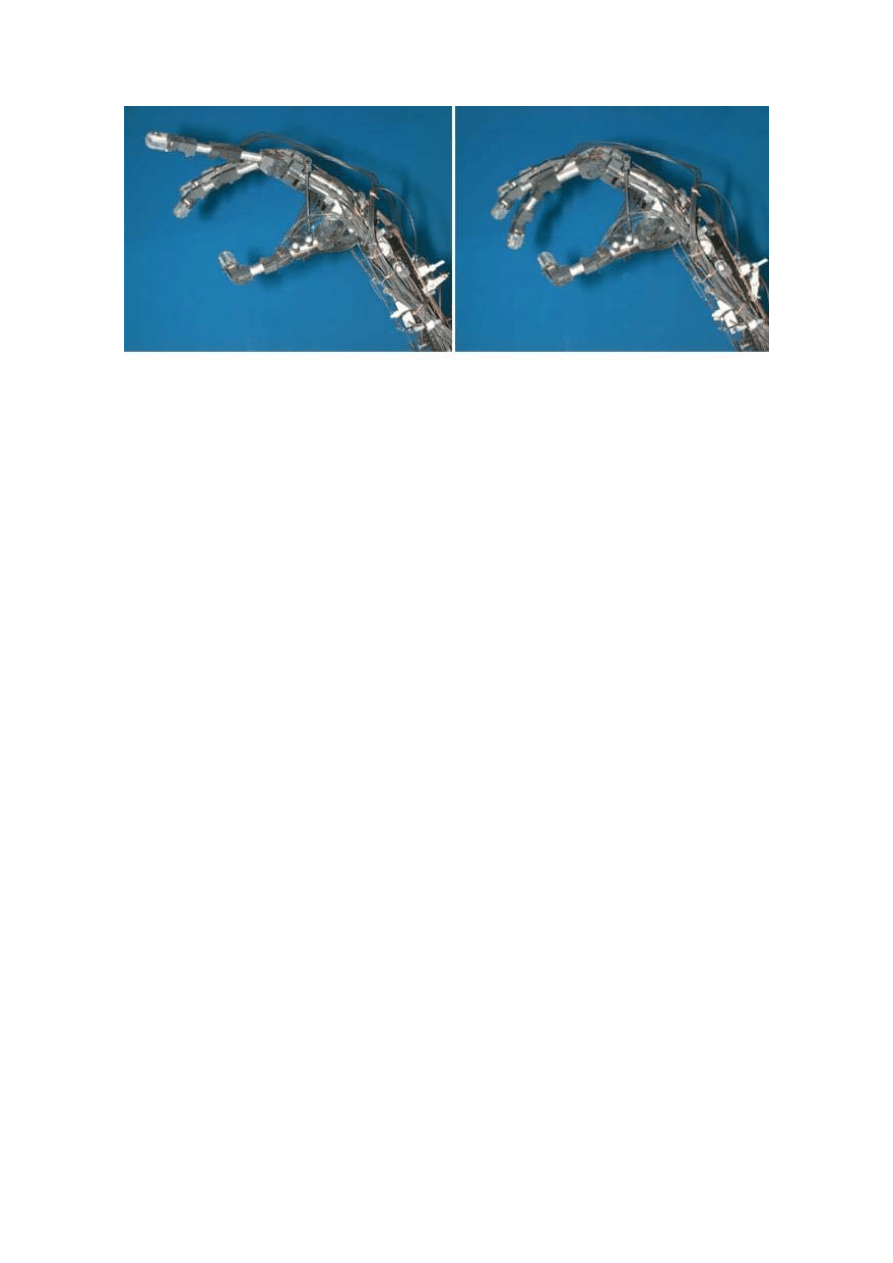
Rys. 5. Inteligentne urządzenie imitujące dłoń ludzką, jej ruchy i kształt
Przedstawia ona rękę robota – androida. Prezentowana na zdjęciu ręka waży ok. 16
kilogramów, co wyklucza zastosowanie jej jako protezy, niemniej jednak należy zwróci
uwagę na kilka zasadniczych faktów. Urządzenie to w doskonały sposób oddaje kształt i
funkcję wykonywane przez ludzka dłoń. Nie mówimy tu oczywiście o czułym dotyku, bo jak
sami widzicie nie wygląda ona zbyt subtelnie, ale o funkcji chwytania, przenoszenia. Robot z
zainstalowaną dłonią może nam również pomachać, a gdyby nałożyć na dłoń syntetyczna
skórę, której fotografii nie udało mi się zdobyć, to gdyby nie jej twardość i waga i
temperatura, nie bylibyśmy w stanie stwierdzić ze jest ona sztuczna, gdyż jej ruchy, dzięki
zastosowaniu odpowiednich regulatorów i innych urządzeń, których producent nie zdradził są
niesamowicie płynne. Ciekawe jest, czy nie udałoby się skonstruować takiej, która mogłaby
zastąpić inwalidzie jego stracona rękę. Problemem jest jedynie jej masa i dosyć duża energia,
jaką potrzebuje do działania oraz co bardzo ważne, zapewnienie jej większej delikatności,
gdyż witając się z nią można by było okupić to poważnym zmiażdżeniem dłoni. Jednak
dynamiczny rozwój tej technologii rokuje duże nadzieje na to, iż te kilka kwestii zostanie
wkrótce rozwiązanych.
Na podstawie przedstawionych przykładów można powiedzieć, kiedy potrzebne jest
zastąpienie kończyny ludzkiej przez urządzenie. Wyróżnić należy kilka ważniejszych
przypadków. I tak, gdy mamy do czynienia z:
¾ Materiałami niebezpiecznymi;
¾ Otoczeniem niebezpiecznym:
¾ Elementami bardzo małymi, kruchymi;
¾ Nieszczęśliwymi wypadkami;
¾ Słabym dostępem;
¾ Wymogiem nietypowych warunków pracy;
¾ Koniecznością dużej precyzji;
¾ Itp.
A może już pora na coś nowego? Po co nam w sztucznych mięśniach tony żelastwa,
siłowników, baterii, przekładni zębatek itp. Alternatywą może być fotografia pokazana na rys.
6. Przedstawia ona zabawkę wykonaną przez inżynierów z Osaki. Na pozór niewinnie
wyglądające akwarium z rybkami. Jest to jednak jedno z największych odkryć ostatnich kilku
lat w dziedzinie sztucznych mięśni. Otóż rybki te beztrosko pływają sobie po akwarium do
złudzenia przypominając żywe. Co w nich takiego wyjątkowego? Jaskrawo ubarwione,
poruszające się w wodzie całkiem naturalnie rybki nie zawierają żadnych elementów
mechanicznych - silników, wałków, kół zębatych ani nawet baterii. Rybki pływają, ponieważ
ich plastikowe wnętrze wygina się raz w jedną, raz w drugą stronę, jakby zgodnie z ich wolą.
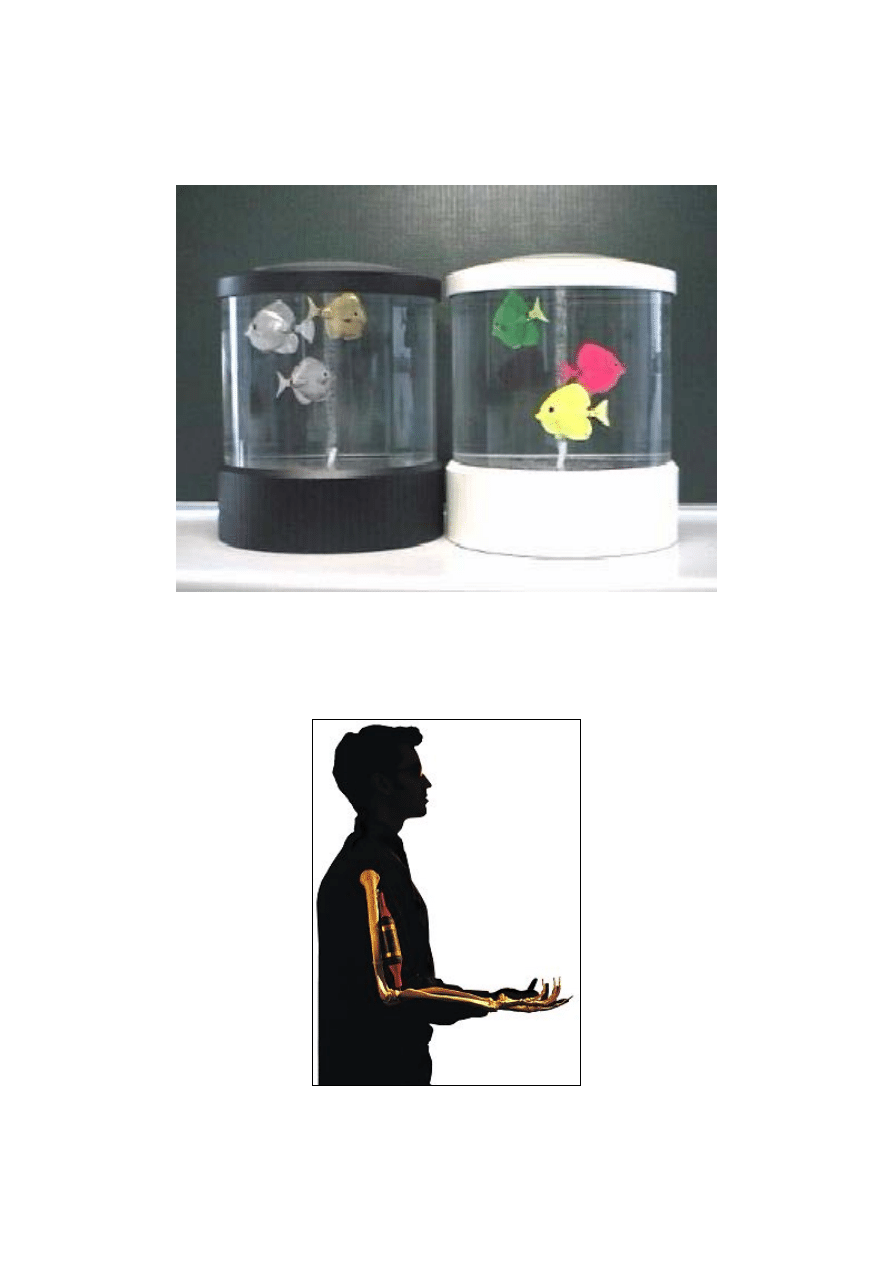
To pierwszy produkt na rynku, w którym zastosowano elektroaktywne polimery nowej
generacji - tworzywa sztuczne odkształcające się pod wpływem elektryczności.
Rys. 6. Droga zabawka, czy przełomowe odkrycie?
Przez całe dziesięciolecia inżynierowie konstruujący siłowniki marzyli o sztucznym
odpowiedniku mięśni. Siłownik, który ma spełniać ich rolę jest widoczny na rys. 7.
Rys. 7. Siłownik oparty na elektroaktywnych polimerach
Działanie mięśni jest proste: pobudzane impulsami nerwowymi, zmieniają długość
i wywierają w ten sposób odpowiedniej wielkości siłę - raz wystarczającą do poruszenia
powieką, innym razem do uniesienia sztangi. Mięśnie cechuje niezmienniczość skali -
mechanizm działania sprawdza się niezależnie od ich rozmiarów, dzięki czemu nieróżniące
się w
istotny sposób tkanki mięśniowe poruszają i
ciałem owada, i
słonia. Układy
przypominające mięśnie byłyby przydatne do budowy miniaturowych urządzeń, do których
trudno skonstruować dostatecznie małe silniki elektryczne. Nadzieją na spełnienie marzenia
o sztucznych mięśniach są elektroaktywne polimery. Już dziś pracuje się intensywnie nad
zastąpieniem nimi wielu stosowanych obecnie rozwiązań.
Parę lat temu Yoseph Bar-Cohen, badacz z Kalifornii, chcąc wzbudzić zainteresowanie
tym tematem, rzucił wyzwanie naukowcom - obiecał nagrodę pieniężną tym, którzy
wykorzystując elektroaktywne polimery, zbudują ramię robota i wygrają z człowiekiem
zapasy "na rękę" (rys. 8).
Rys. 8. Zapasy na rękę z maszyną
Wydaje się, że najbliższa sukcesu jest grupa z SRI International, niezależnego
laboratorium z Menlo Park w Kalifornii. Jaki cel na początek stawia sobie firma? Tylko
zastąpienie znacznej części niezliczonej liczby silników elektrycznych i innych używanych
dziś mechanizmów napędowych mniejszymi, lżejszymi i tańszymi urządzeniami opartymi na
nowatorskich siłownikach z SRI.
Zasada działania nowego rodzaju siłowników, nazywanych sztucznymi mięśniami, jest
stosunkowo prosta. Wiele elastomerów dielektrycznych (rodzaj izolujących elektroaktywnych
tworzyw sztucznych), na przykład polimery silikonowe i
akrylowe, umieszczonych
w
dostatecznie silnym polu elektrycznym, kurczy się w
kierunku pola i
rozszerza
w płaszczyźnie do niego prostopadłej, ulegając zjawisku, które fizycy nazywają naprężeniem
Maxwella. Nowe urządzenia przypominają giętkie kondensatory - dwie okładki
z umieszczoną między nimi warstwą dielektryka. Po podłączeniu napięcia przeciwległe
okładki ładują się odpowiednio dodatnio i ujemnie. Przyciągają się i zgniatają rozdzielający je
izolator, który w
odpowiedzi zwiększa swoją powierzchnię. Inżynierowie powlekają
z obydwu stron cienkie (zwykle grubości 30-60 mm) warstwy elastomerów dielektrycznych
plastycznym polimerem, zawierającym drobiny przewodzącego węgla. Po połączeniu
przewodami z zasilaczem zewnętrzne warstwy z węglem służą za elastyczne elektrody,
rozciągające się wraz ze znajdującym się między nimi materiałem. Taka przypominająca

kanapkę struktura jest podstawowym elementem wielu rodzajów nowych siłowników,
czujników i generatorów prądu.
Elastomery dielektryczne mogące zwiększać swoje rozmiary nawet czterokrotnie nie są
oczywiście jedynymi materiałami elektroaktywnymi, należą jednak do najefektywniejszych.
Polimery odkształcające się pod wpływem elektryczności można podzielić na dwa
rodzaje:
¾ Jonowe;
¾ elektronowe.
Każdy z nich ma wady i zalety.
Jonowe polimery elektroaktywne (w tym jonowe żele polimerowe, jonomerowe
kompozyty polimer-metal, przewodzące polimery oraz nanorurki węglowe) działają na
zasadzie dyfuzji jonów. Ponieważ wyraźne odkształcenie powstaje pod wpływem zmiany
napięcia o pojedyncze wolty, do zasilania wystarczają baterie. Problem w tym, że aby
działały, muszą być wilgotne, stąd konieczność ich szczelnego zamykania w elastycznych
koszulkach. Inna poważna wada wielu jonowych polimerów elektroaktywnych (w
szczególności jonomerowych kompozytów polimer-metal) polega na tym, że "ruch trwa tak
długo, jak przykładane jest napięcie, a przekroczenie jego granicznej wartości inicjuje
elektrolizę, która nieodwracalnie uszkadza materiał".
Elektronowe polimery elektroaktywne (takie jak polimery ferroelektryczne, elektrety,
elastomery dielektryczne i
elektrostrykcyjne elastomery szczepione) natomiast są
uaktywniane przez pole elektryczne. Wymagają więc stosunkowo wysokich napięć, które
mogą powodować nieprzyjemne elektrowstrząsy. W zamian jednak polimery te reagują
szybko i ze znaczną siłą. Nie wymagają powłok ochronnych i prawie nie potrzebują prądu do
utrzymania pozycji.
Polimery, które zmieniają wielkość pod wpływem elektryczności, umożliwiają
projektowanie sterowanych wydłużających się lub zginających siłowników. Inżynierowie
najpierw nawijają dwie warstwy arkusza elastomeru (pokrytego z obydwu stron giętkimi
elektrodami) na walec. Często warstwy nawija się na ściśniętą sprężynę, która silnie napręża
wstępnie elastomer, zwiększając skuteczność urządzenia. Siłowniki cylindryczne (tzw. spring
rollsy) mogą mieć wiele zastosowań w robotach, protezach, pompach, zaworach i wszędzie
tam, gdzie wymagany jest przesuw liniowy. Na razie mogą one działać siłą do 30 N, ze
skokiem 2 cm i częstotliwością 50 Hz. Aby uzyskać wyższe parametry, można zastosować
większe siłowniki albo połączyć je szeregowo lub równolegle.
Przez stosunkowo prostą modyfikację siłowników cylindrycznych można uzyskać
siłowniki zginające. Na boczne powierzchnie walca nanosi się specjalny układ elektrod tak,
że po każdej stronie walca powstaje niezależnie zasilany siłownik. Jeżeli napięcie
doprowadza się tylko do lewej części, prawa strona działa hamująco i walec wygina się
w prawo. Jeżeli aktywujemy tylko prawą część, walec wygina się w lewo. Aktywacja obydwu
siłowników powoduje wydłużenie walca. Bardziej skomplikowane układy niezależnych
elektrod umożliwiają bardziej złożone ruchy i mogą posłużyć do konstrukcji robotów
naśladujących ruchy węża, manipulatorów, zdalnie sterowanych cewników i endoskopów,
nóg robotów i mechanizmów nakierowywania anten.
Reasumując można dodać, iż fizycy i chemicy przez długi czas poszukiwali lekkich
materiałów, które w
reakcji na prąd elektryczny w
znaczny sposób zmniejszałyby
lub zwiększały swoje rozmiary. Materiały o takich właściwościach mogłyby posłużyć jako
siłowniki i zastąpić powszechnie stosowane silniki elektryczne, które w przypadku małych
urządzeń są zbyt duże i ciężkie. Nowa generacja elektroaktywnych polimerów wykazuje
dostateczną reakcję na pobudzenie elektryczne, aby dać początek nowej klasie siłowników,
a także czujników i generatorów. Produkty wytwarzane z wykorzystaniem technologii
"sztucznych mięśni" zaczynają się już pojawiać na rynku.

Bibliografia
1. www.roboty.po.opole.pl
2. www.ai.mit.edu/projects/muscle/muscle.html
3. www.cnn.com
4. www.ndeaa.jpl.nasa.gov
5. www.swiatnauki.pl
6. www.nature.com/nsu/030303/030303-4.html
Wyszukiwarka
Podobne podstrony:
PR ETI W 23 2 id 382135 Nieznany
PR ETI W 11 id 382128 Nieznany
5366 Ref 22 id 41421 Nieznany (2)
G2 PB 02 B Rys 3 22 id 185421 Nieznany
PR product placement id 382269 Nieznany
pr got 1v 2 id 382143 Nieznany
Pr konst opis id 382146 Nieznany
IMG 22 id 210963 Nieznany
pr A2 2012 id 381782 Nieznany
PR ETI W 22 1
m eti w01 id 274690 Nieznany
pr bezwl i lepkosc id 381784 Nieznany
23 Rozdziae 22 id 30122 Nieznany (2)
mikro 22 id 300571 Nieznany
pr A1 2012 id 381781 Nieznany
IMG 22 id 211205 Nieznany
6 22 id 43144 Nieznany
chemia pp pr odp klucz(1) id 11 Nieznany
więcej podobnych podstron