Akademia Górniczo-Hutnicza
im. Stanisława Staszica w Krakowie
Teoria Maszyn i Mechanizmów
Analiza Mechanizmu Dźwigniowego wg Schematu:

Teoria Maszyn i Mechanizmów- projekt nr.2A
2 z 21
1
Synteza strukturalna i geometryczna mechanizmu
3
1.1
Zdefiniowanie wymiarów mechanizmu, oraz parametrów jednego jego położenia
3
1.2
Wyznaczenie ruchliwości mechanizmu.
4
2
Analiza kinematyczna mechanizmu.
5
2.1
Analiza kinematyczna mechanizmu metoda grafoanalityczna.
5
2.1.1 Grafoanalityczna analiza prędkości mechanizmu.
5
3
Prędkość członu napędzającego
5
3.1.1 Grafoanalityczna analiza przyśpieszeń mechanizmu
8
3.2
Analiza kinematyczna mechanizmu metoda analityczna.
11
3.2.1 Wyznaczenie nieznanych parametrów konstrukcyjnych mechanizmu
12
3.2.2 Analiza prędkości mechanizmu.
13
3.2.3 Analiza przyspieszeń mechanizmu
14
3.3
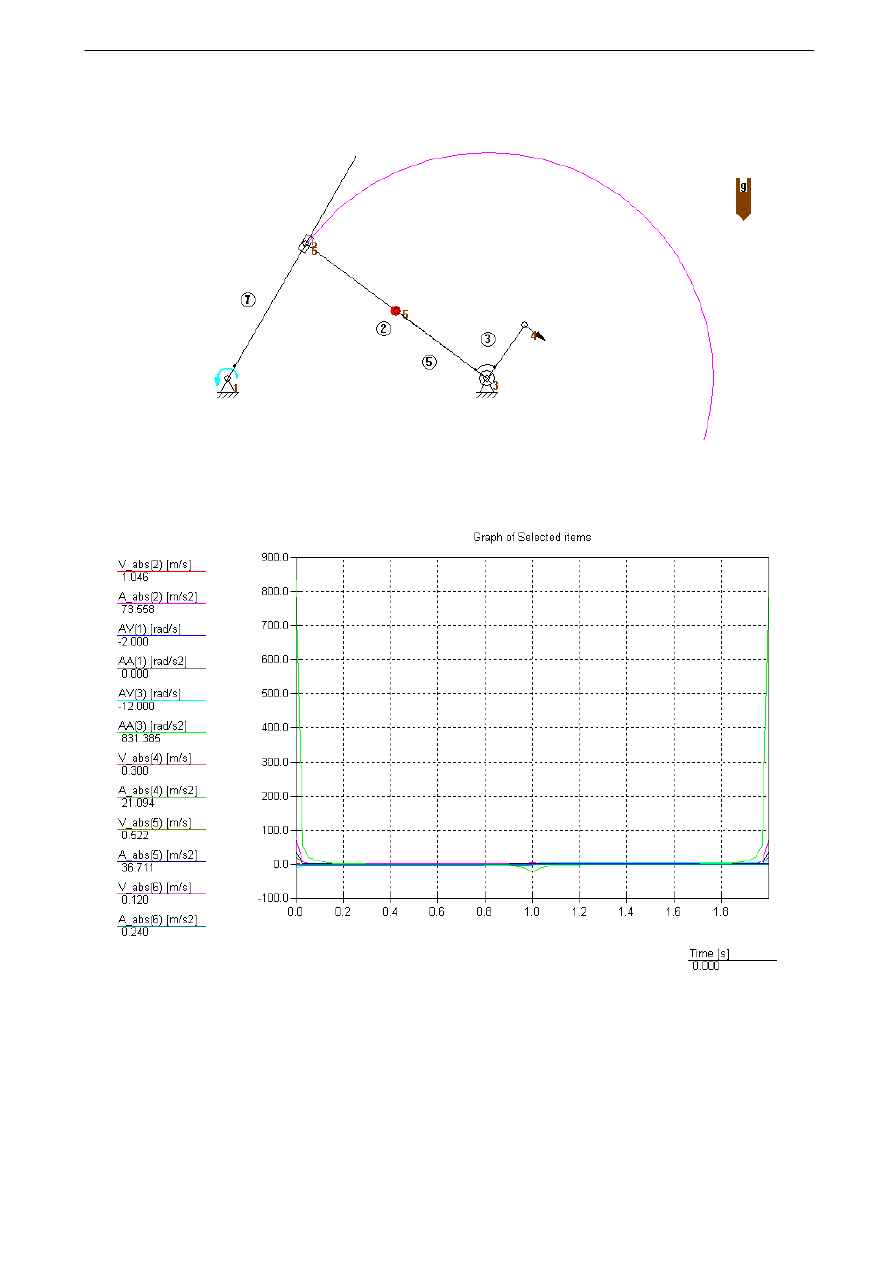
Analiza kinematyczna mechanizmu za pomocą programu SAM4.2
15
3.4
Schemat mechanizmu zamodelowany w programie SAM 4.2
15
3.5
Wyniki analizy kinematycznej w programie
15
3.6
Podsumowanie analizy kinematycznej mechanizmu, oraz zestawienie wyników.
16
4
Analiza kinetostatyczna mechanizmu.
17
4.1
Założenia analizy:
17
4.1.1 Wyznaczenie sił bezwładności działających na mechanizm:
17
4.1.2 Wyznaczenie sil grawitacji działających na mechanizm:
18
4.1.3 Odrzucenie członu napędzającego, oraz uwolnienie układu od więzów
18
4.1.4 Równanie wektorowe równowagi sił działających na grupę strukturalną
18
4.1.5 Wyznaczenie nieznanych reakcji z równań momentów i planu sił
18
4.1.6 Wyznaczenie siły równoważącej, oraz sił reakcji działających na człon napędzający 19
4.2
Wyznaczenie siły równoważącej działającej na człon metoda mocy chwilowych
20
4.3
Analiza kinetostatyczna w SAMIE
21
4.4
Podsumowanie analizy kinetostatycznej
21
Teoria Maszyn i Mechanizmów- projekt nr.2A
3 z 21
1
Synteza strukturalna i geometryczna mechanizmu
1.1
Zdefiniowanie wymiarów mechanizmu, oraz parametrów jednego jego
położenia
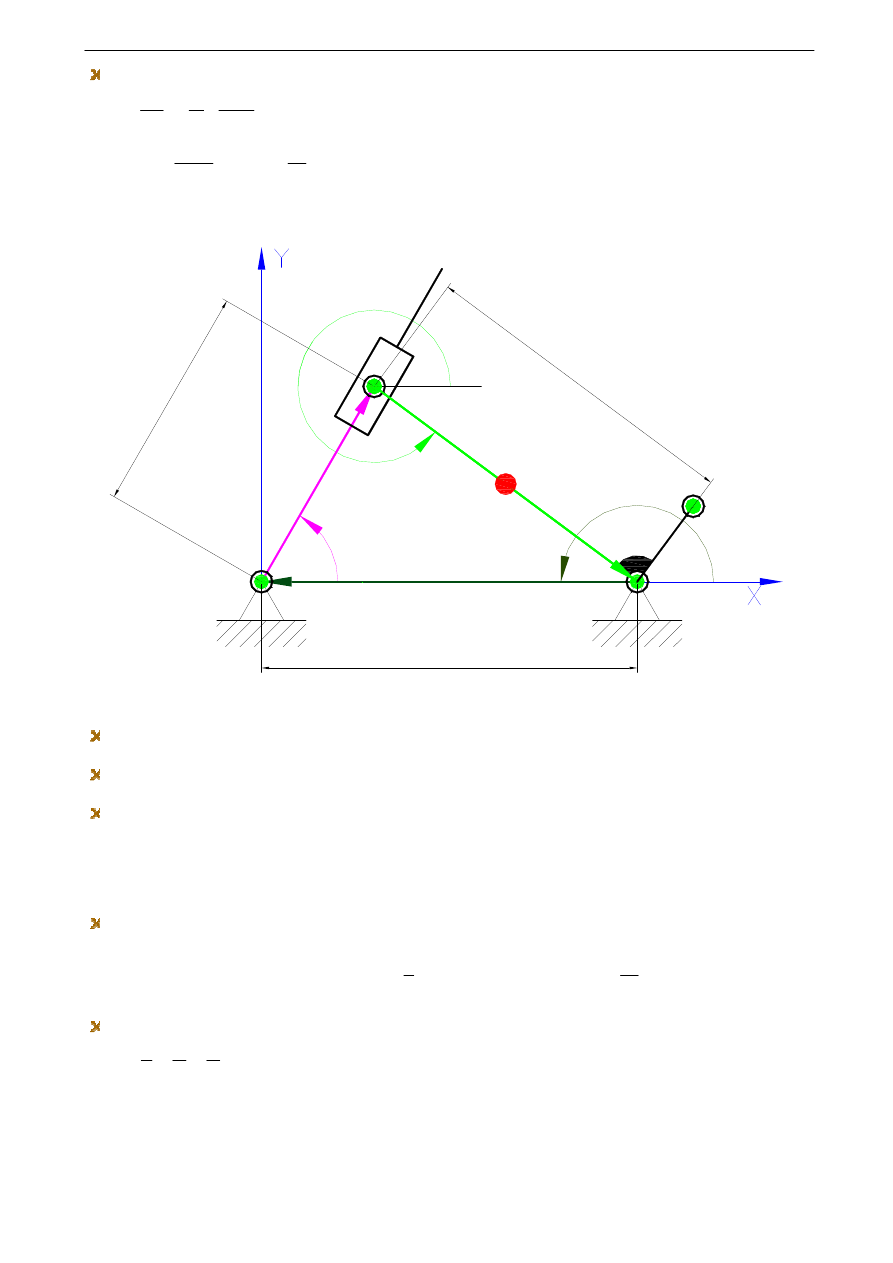
W poniższym podpunkcie zostały przyjęto, wymiary mechanizmu oraz ograniczenia
warunkujące jego prawidłową prace i działanie. Również założyłem początkowe
położenie mechanizmu, oraz prędkości i przyspieszenie członu napędzającego.
6
0
°
3
6
,5
9
°
0,
02
5
[m
]
0
,0
6
[
m
]
0,0
87
17
8 [m
]
0,1 [m]
B
0
C
S3
A(A
1
,A
2
,A
3
)
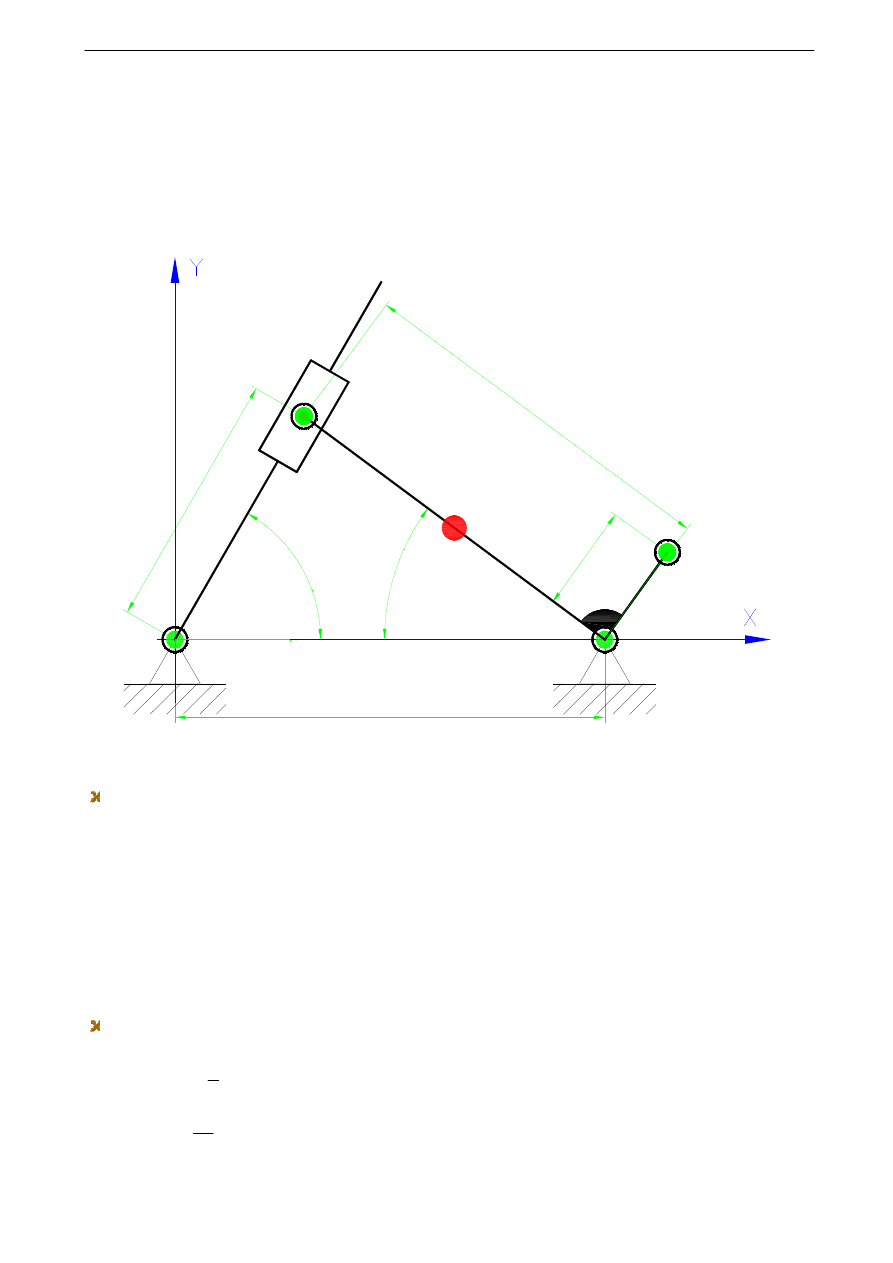
Rys. 1 .
Schemat mechanizmu
Przyjęto wymiary:
|AB|= 0,0872 [m]
|BC|= 0,025[m]
|0B|= 0,1[m]
oraz dla jednego położenia mechanizmu:
φ
1
=60[°]
Zdefiniowano prędkość i przyspieszenie członu napędzającego:
2
1
1
1
0
.
1
20
s
const
s
=
=
=
ε
ω
Teoria Maszyn i Mechanizmów- projekt nr.2A
4 z 21
1.2
Wyznaczenie ruchliwości mechanizmu, podział na grupy strukturalne oraz
klasyfikacja mechanizmu.
Podział na grupy strukturalne.
Czlon napedzajacy
Grupa strukturalna
B
C
S3
0
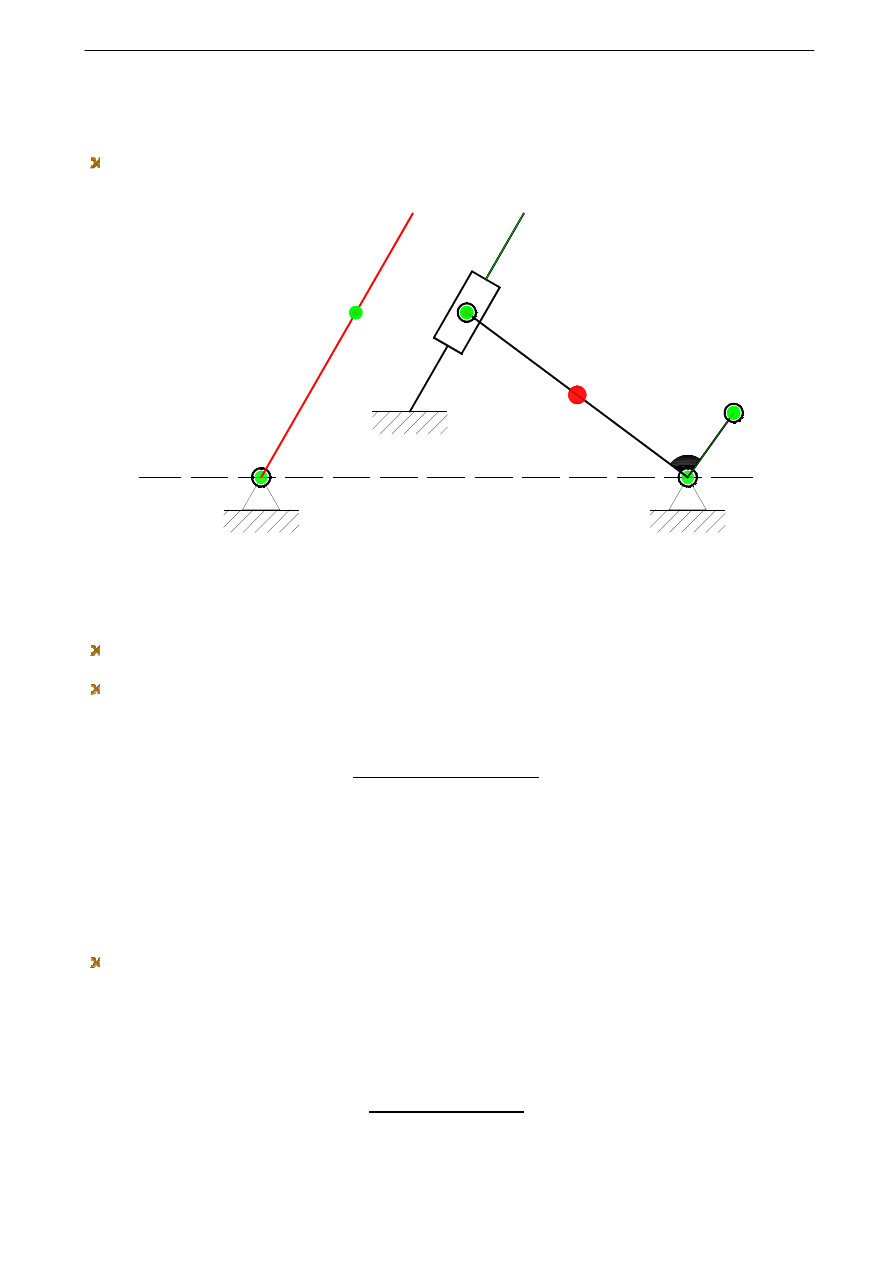
Rys. 2 .
Podział mechanizmu
Grupa strukturalna analizowanego mechanizmu jest klasy II
Ruchliwość mechanizmu:
i
i
p
i
n
w
⋅
−
−
⋅
=
∑
=
5
4
)
3
(
3
w- ruchliwość mechanizmu
n- liczba członów mechanizmu
i- klasa par występujących w łańcuchu kinematycznym
p
4
- para kinematyczna klasy czwartej
p
5
- para kinematyczna klasy piątej
Wyznaczenie ruchliwości analizowanego mechanizmu
n= 3
p
4
=0
p
5
=4
1
4
2
3
3
=
⋅
−
⋅
=
w
Ruchliwość mechanizmu w=1
Teoria Maszyn i Mechanizmów- projekt nr.2A
5 z 21
2
Analiza kinematyczna mechanizmu.
2.1
Analiza kinematyczna mechanizmu metoda grafoanalityczna.
Analiza kinematyczna wykonana jest dla jednego wybranego położenia mechanizmu.
V
S3
V
C
B
0
C
S3
A(A
1
,A
2
,A
3
)
V
A1
V
A2A1
V
A2
=V
A3
Rys. 3 .
Schemat rozkładu prędkości
2.1.1
Grafoanalityczna analiza prędkości mechanizmu.
3
Prędkość członu napędzającego
ω
1
=2 [1/s]
Wyznaczenie prędkości V
A1
Prędkość V
A
=ω
1
|OA|= 0,12
s
m
Wyznaczenie prędkości V
A2
=V
A3
1
2
1
2
A
A
A
A
V
V
V
+
=
Wektor prędkości V
A1
jest prostopadły |0A|
Wektor prędkości V
A2A1
jest równoległy |OA|
Wektor prędkości V
A2
jest prostopadły |AB|
Teoria Maszyn i Mechanizmów- projekt
nr.2A
6 z 21
Wyznaczenie prędkości V
C
3
3
3
2
3
287
,
0
|
087178
,
0
|
|
025
,
0
|
|
|
|
|
A
A
CA
C
V
V
BC
V
BC
V
⋅
=
⋅
=
⋅
=
×
=
ω
ω
Prędkość (m
2
) środka masy
3
3
3
3
3
3
5
,
0
|
|
3
|
|
3
|
|
3
|
A
A
S
S
V
V
AB
B
S
B
S
V
BS
V
⋅
=
⋅
=
⋅
=
×
=
ω
ω
Przyjęcie podziałki rysunkowej dla planu prędkości:
s
mm
m
k
mm
s
m
V
⋅
=
=
1
,
0
]
[
10
1
V
S3
V
A1
V
A2
=V
A3
1,2
[m
m]
1
0
,3
9
2
[
m
m
]
10
,4
61
[m
m
]
5,
23
1
[m
m
]
V
A2A1
3,0
02
[m
m
]
V
C
Rys. 4 .
Plan prędkości
π
V

Teoria Maszyn i Mechanizmów- projekt
nr.2A
7 z 21
Z planu prędkości odczytano następujące wartości:
( )
( )
( )
(
)
( )
=
=
=
=
=
=
=
=
=
=
s
m
V
mm
V
s
m
V
mm
V
s
m
V
mm
V
s
m
V
mm
V
s
m
V
mm
V
S
S
A
A
A
A
C
C
A
A
A
A
5231
,
0
]
[
231
,
5
0392
,
1
]
[
392
,
10
3002
,
0
]
[
002
,
3
0461
,
1
]
[
461
,
10
0461
,
1
]
[
461
,
10
2
3
1
2
1
2
3
3
2
2
Wyznaczenie pr
ę
dko
ś
ci k
ą
towej członu trzeciego
≈
=
=
=
×
=
s
AB
V
AB
V
A
A
1
12
9996
,
11
087178
,
0
0461
,
1
|
|
|
|
3
3
3
3
ω
ω
Teoria Maszyn i Mechanizmów- projekt
nr.2A
8 z 21
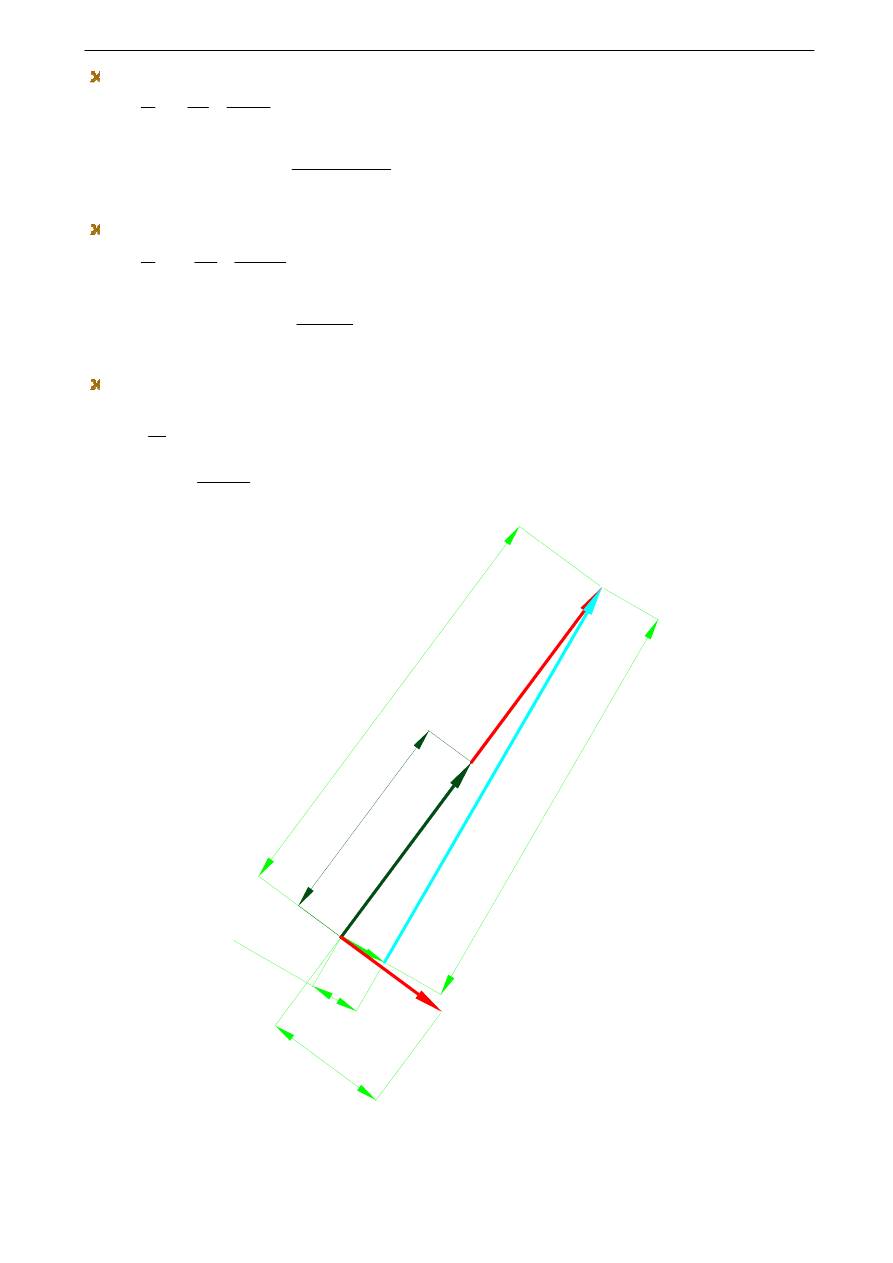
3.1.1
Grafoanalityczna analiza przyśpieszeń mechanizmu
Przyspieszenie k
ą
towe członu nap
ę
dzaj
ą
cego zostało zdefiniowane w punkcie pierwszym i
wynosi:
2
1
1
0
s
=
ε
Przyspieszenie punktu A
1
a
a
a
n
A
t
A
A
1
1
1
+
=
gdzie
=
⋅
=
=
=
⋅
=
2
2
1
1
1
1
1
24
,
0
|
0
|
0
0
|
0
|
s
m
A
a
A
a
n
A
t
A
ω
ε
ε
Wektor przyspieszenia a
t
A1
jest prostopadły |0A|
Wektor przyspieszenia a
n
A1
jest równoległy |0A|
Wyznaczenie przyspieszenia pkt. A
2
i A
3
cor
A
A
t
A
A
A
n
A
t
A
A
a
a
a
a
a
a
1
2
1
2
1
2
2
2
+
+
=
+
=
gdzie,
=
⋅
⋅
=
×
=
=
⋅
=
=
2
1
2
1
1
2
1
2
2
2
3
2
2
1
1564
,
4
2
0392
,
1
2
2
554
,
12
|
|
24
,
0
s
m
a
s
m
AB
a
s
m
a
cor
A
A
A
A
cor
A
A
n
A
A
V
a
ω
ω
Wektor przyspieszenia a
A2
n
jest równoległy do |AB|
Wektor przyspieszenia a
A2
t
jest prostopadły do |AB|
Wektor przyspieszenia a
A2A1
cor
jest prostopadły do |OA|
Wektor przyspieszenia a
A2A1
t
jest równoległy do |OA|
Teoria Maszyn i Mechanizmów- projekt
nr.2A
9 z 21
Przyspieszenie pkt.C
a
a
a
a
a
a
a
a
n
C
C
C
C
C
C
C
n
C
AB
BC
s
BC
+
=
⋅
=
→
=
=
=
⋅
=
τ
τ
τ
τ
τ
ε
ω
287
,
0
|
|
|
|
1
6
,
3
|
|
2
2
3
Przyspieszenie (m
3
)
ś
rodka masy
a
a
a
a
a
a
a
a
n
S
S
S
C
S
C
s
n
S
AB
B
S
s
B
S
3
3
3
3
2
3
2
3
3
5
,
0
|
|
|
3
|
1
277
,
6
|
3
|
+
=
⋅
=
→
=
=
=
⋅
=
τ
τ
τ
τ
τ
ε
ω
Przyj
ę
cie podziałki rysunkowej dla planu przy
ś
piesze
ń
:
2
2
1
]
[
1
1
s
mm
m
k
mm
s
m
a
⋅
=
=
Teoria Maszyn i Mechanizmów- projekt
nr.2A
10 z 21
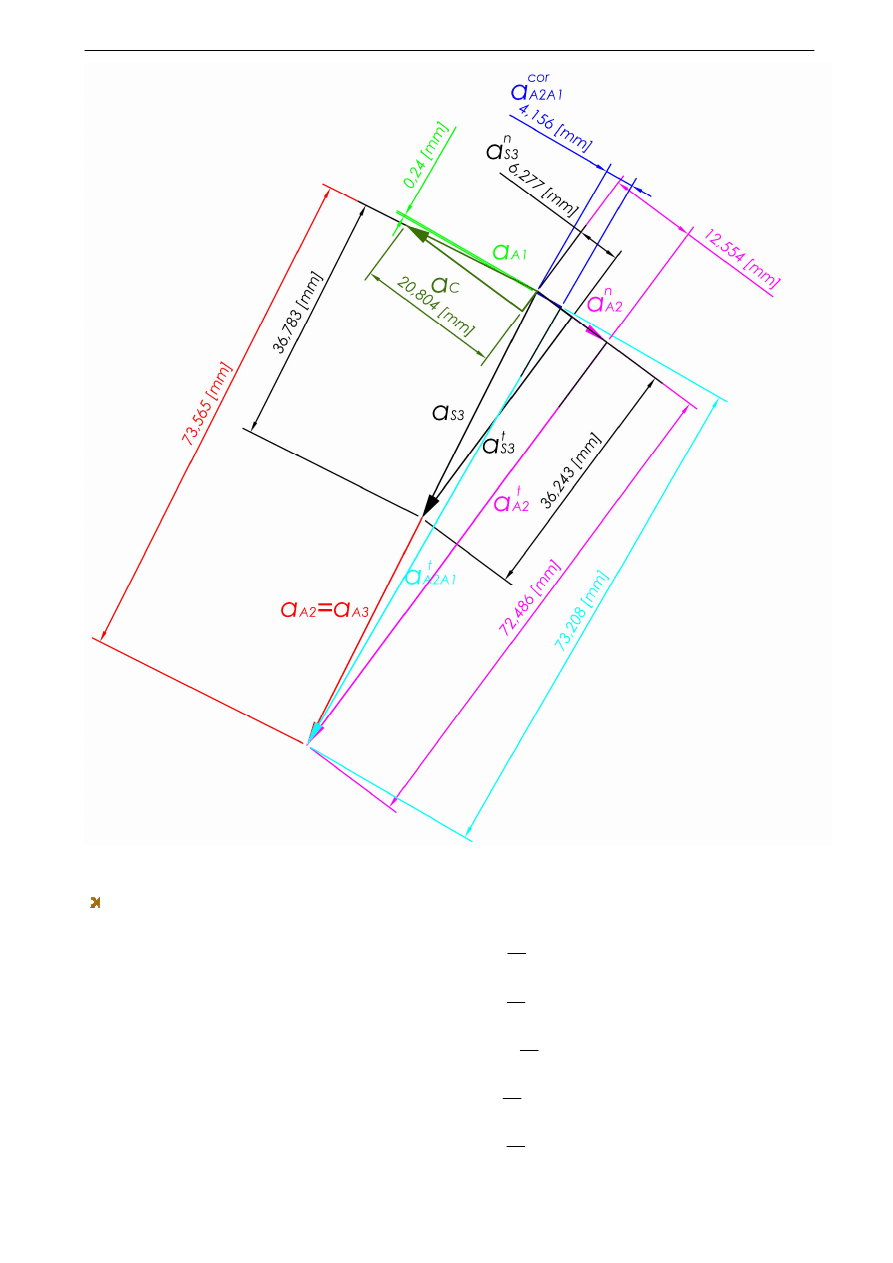
Rys. 5 .
Plan przyspieszeń
Z planu przyspiesze
ń
odczytano nast
ę
puj
ą
ce przyspieszeni:
( )
( )
( )
( )
( )
2
3
3
2
2
1
2
1
2
2
3
3
2
2
2
783
,
36
]
[
783
,
36
804
,
20
]
[
804
,
20
208
,
73
]
[
208
,
73
565
,
73
]
[
565
,
73
565
,
73
]
[
565
,
73
s
m
mm
s
m
mm
s
m
mm
s
m
mm
s
m
mm
a
a
a
a
a
a
a
a
a
a
S
S
C
C
t
A
A
t
A
A
A
A
A
A
=
=
=
=
=
=
=
=
=
=
π
A
Teoria Maszyn i Mechanizmów- projekt
nr.2A
11 z 21
Wyznaczenie przyspieszenia k
ą
towego członu trzeciego
=
=
×
=
2
3
3
3
3
1
47
,
831
|
|
|
|
s
AB
a
AB
a
A
A
τ
τ
ε
ε
3.2
Analiza kinematyczna mechanizmu metoda analityczna.
l
1
l
2
l
0
B
0
C
S3
A
(
A
1
,
A
2
,
A
3
)
0,1[m]
0,0
87
18
[m
]
0
,0
6
[m
]
Rys. 6 .
Schemat mechanizmu do analizy metodą analityczną
φ
1
(t) definiuje ruch członu nap
ę
dzaj
ą
cego:
l
1
(t) ,
φ
2
(t), s
ą
funkcjami zmiennymi w czasie
Poni
ż
sze funkcje s
ą
funkcjami stałymi i nie zale
żą
od czasu, przyjmuj
ą
zawsze stal
ą
warto
ść
:
l
2
(t)=0,0872[m]
φ
0
(t)=180
◦
l
0
(t)= 0,1 [m]
Dla zadanego poło
ż
enia mamy
]
1
[
0
)
(
]
1
[
2
)
(
]
[
60
)
(
2
1
1
s
t
s
t
t
=
=
=
=
°
=
•
•
•
ε
ϕ
ω
ϕ
ϕ
Wyznaczenie ogólnych równa
ń
ruchu
0
0
2
1
=
+
+
l
l
l
φ
2
φ
1
φ
0
Teoria Maszyn i Mechanizmów- projekt
nr.2A
12 z 21
Po zrzutowaniu na osie układu wsp. otrzymujemy
0
sin
sin
sin
:
0
cos
cos
cos
:
0
0
2
2
1
1
0
0
2
2
1
1
=
⋅
+
⋅
+
⋅
=
⋅
+
⋅
+
⋅
ϕ
ϕ
ϕ
ϕ
ϕ
ϕ
l
l
l
OY
l
l
l
OX
3.2.1
Wyznaczenie nieznanych parametrów konstrukcyjnych mechanizmu
Nieznany parametr
φ
2
(t)
Obracając układ wsp. o kąt φ
1
(
)
(
)
(
)
(
)
(
)
−
⋅
−
+
=
−
⋅
−
=
−
=
−
⋅
+
−
⋅
=
⋅
+
⋅
+
⋅
2
1
0
0
1
2
2
1
0
0
1
2
1
0
0
1
2
2
0
0
2
2
1
1
sin
arcsin
sin
sin
0
sin
sin
0
sin
sin
sin
:
l
l
l
l
l
l
l
l
l
OY
ϕ
ϕ
ϕ
ϕ
ϕ
ϕ
ϕ
ϕ
ϕ
ϕ
ϕ
ϕ
ϕ
ϕ
ϕ
Po uwzględnieniu stałych parametrów otrzymujemy
(
)
(
)
[
]
[
]
°
°
∈
∧
−
⋅
−
+
=
−
⋅
−
+
=
360
;
270
180
sin
1468
,
1
arcsin
0872
,
0
180
sin
1
,
0
arcsin
2
1
1
2
1
1
2
ϕ
ϕ
ϕ
ϕ
ϕ
ϕ
ϕ
Dla jednego położenia mamy:
°
=
=
41
,
323
)
0
(
0
2
t
ϕ
Nieznany parametr l
2
(t)
(
)
(
)
(
)
(
)
(
)
1
0
0
1
2
2
1
1
0
0
1
2
2
1
1
1
cos
cos
0
cos
cos
cos
ϕ
ϕ
ϕ
ϕ
ϕ
ϕ
ϕ
ϕ
ϕ
ϕ
−
⋅
−
−
⋅
−
=
=
−
⋅
+
−
⋅
+
−
⋅
l
l
l
l
l
l
OX
Po podstawieniu stałych parametrów mechanizmu otrzymujemy
(
)
(
)
1
1
1
180
cos
1
,
0
41
,
323
cos
0872
,
0
ϕ
ϕ
−
⋅
−
−
⋅
−
=
l
Dla jednego położenia mamy:
(
)
(
)
m
t
l
t
l
06
,
0
)
0
(
60
180
cos
1
,
0
60
41
,
323
cos
0872
,
0
)
0
(
0
2
0
2
=
=
−
⋅
−
−
⋅
−
=
=
Teoria Maszyn i Mechanizmów- projekt
nr.2A
13 z 21
3.2.2
Analiza prędkości mechanizmu.
Różniczkując równania drogi po czasie otrzymamy zależność odpowiednich
prędkości od czasu.
0
cos
cos
sin
:
0
sin
sin
cos
:
2
2
2
1
1
1
1
1
2
2
2
1
1
1
1
1
=
⋅
⋅
+
⋅
⋅
+
⋅
=
⋅
⋅
−
⋅
⋅
−
⋅
•
•
ϕ
ω
ϕ
ω
ϕ
ϕ
ω
ϕ
ω
ϕ
l
l
l
OY
l
l
l
OX
Nieznany parametr V
1
(t)
Obracając układ o kąt φ
2
(t) wyznaczy nieznany parametr z równania OX
(
)
(
)
(
)
(
)
(
)
(
)
s
m
l
tg
l
tg
l
l
l
l
l
0387
,
1
41
,
323
60
2
06
,
0
cos
sin
0
sin
cos
1
1
2
1
1
1
2
1
2
1
1
1
1
2
1
1
1
2
1
1
−
=
−
⋅
⋅
=
−
⋅
⋅
=
−
−
⋅
⋅
=
=
−
⋅
⋅
−
−
⋅
•
•
•
•
ϕ
ϕ
ω
ϕ
ϕ
ϕ
ϕ
ω
ϕ
ϕ
ω
ϕ
ϕ
Nieznany parametr
ω
2
(t)
Obracając układ o kąt φ
1
(t) wyznaczymy nieznany parametr z równania OY
(
)
(
)
(
)
(
)
(
)
(
)
s
l
l
l
l
l
l
l
1
99
,
11
41
,
263
cos
0872
,
0
2
06
,
0
cos
0
cos
0
cos
cos
sin
2
2
1
2
2
1
1
2
1
2
2
2
1
1
1
2
2
2
1
1
1
1
1
1
1
=
⋅
⋅
−
=
−
⋅
⋅
−
=
=
−
⋅
⋅
+
⋅
=
−
⋅
⋅
+
−
⋅
⋅
+
−
⋅
•
ω
ω
ϕ
ϕ
ω
ω
ϕ
ϕ
ω
ω
ϕ
ϕ
ω
ϕ
ϕ
ω
ϕ
ϕ
Teoria Maszyn i Mechanizmów- projekt
nr.2A
14 z 21
3.2.3
Analiza przyspieszeń mechanizmu
Różniczkując równania prędkości po czasie otrzymamy zależność odpowiednich
przyspieszeń od czasu.
Nieznany parametr a
2
(t)
Nieznaną wartość przyspieszania wyznaczymy bezpośrednio z równania prędkości
od czasu przez wyznaczenie pochodnej tego równania
(
)
(
)
(
)
(
)
(
)
(
)
(
)
(
)
(
)
(
)
2
1
2
1
2
1
2
2
1
1
1
2
1
1
1
1
2
1
2
2
1
1
1
2
1
1
1
2
1
1
1
1
2
1
1
1
1
038
,
73
41
,
263
cos
1
99
,
9
06
,
0
2
41
,
263
2
0387
,
1
cos
1
cos
1
s
m
l
tg
l
l
tg
l
l
l
tg
l
tg
l
l
tg
l
l
−
=
−
⋅
⋅
⋅
−
−
⋅
⋅
−
=
−
⋅
−
⋅
⋅
+
−
⋅
⋅
=
−
⋅
−
⋅
⋅
+
−
⋅
⋅
+
−
⋅
⋅
=
−
⋅
⋅
=
•
•
•
•
•
•
•
•
•
•
•
•
ϕ
ϕ
ω
ω
ω
ϕ
ϕ
ω
ϕ
ϕ
ω
ω
ω
ϕ
ϕ
ε
ϕ
ϕ
ω
ϕ
ϕ
ω
Nieznany parametr
ε
2
(t)
Nieznaną wartość przyspieszania wyznaczymy bezpośrednio z równania prędkości
od czasu przez wyznaczenie pochodnej tego równania
(
)
(
)
(
)
(
) (
)
(
)
(
)
(
)
(
) (
)
(
)
(
)
(
)
(
)
(
)
(
)
2
2
2
2
2
1
2
2
1
2
1
2
2
1
1
1
2
2
1
1
2
2
1
2
2
1
2
1
2
2
1
1
1
2
2
1
1
1
1
2
1
2
2
1
1
2
1
363
,
830
41
,
263
cos
0872
,
0
41
,
263
sin
99
,
9
2
06
,
0
41
,
263
cos
2
0387
,
1
cos
sin
cos
cos
sin
cos
cos
s
l
l
l
l
l
l
l
l
l
l
l
l
l
=
⋅
⋅
⋅
⋅
+
⋅
⋅
−
−
=
−
⋅
−
⋅
−
⋅
⋅
⋅
+
−
⋅
⋅
⋅
−
=
−
⋅
−
⋅
−
⋅
⋅
⋅
+
−
⋅
⋅
⋅
+
⋅
−
=
−
⋅
⋅
−
=
•
•
ε
ε
ϕ
ϕ
ϕ
ϕ
ω
ω
ω
ϕ
ϕ
ω
ε
ϕ
ϕ
ϕ
ϕ
ω
ω
ω
ϕ
ϕ
ε
ω
ε
ϕ
ϕ
ω
ω
Teoria Maszyn i Mechanizmów- projekt
nr.2A
15 z 21
3.3
Analiza kinematyczna mechanizmu za pomocą programu SAM4.2
3.4
Schemat mechanizmu zamodelowany w programie SAM 4.2
Rys. 7 .
Schemat mechanizu w SAMie
3.5
Wyniki analizy kinematycznej w programie
Rys. 8 .
Wyniki analizy
Teoria Maszyn i Mechanizmów- projekt
nr.2A
16 z 21
3.6
Podsumowanie analizy kinematycznej mechanizmu, oraz zestawienie
wyników.
Metoda
grafoanalityczna
Metoda
analityczna
SAM
Prędkości liniowe i kątowe mechanizmu
V
A1
0,12
-
0,12
V
A2
1,0461
-
1,064
V
A2A1
1,0392
-1,0387
-
V
A3
1,0461
-
1,046
V
S3
0,5231
-
0,522
V
C
0,3
-
0,3
ω
2
2
2
-2
ω
3
12
11,99
-12
Przyspieszenia liniowe i kątowe mechanizmu
a
A1
0,24
-
0,24
a
A2
73,565
-
73,558
a
n
A2
12,554
-
-
a
t
A2
72,486
-
-
a
t
A2A1
73,208
-73,038
-
a
A3
73,565
-
73,558
a
C
20,804
-
21,094
a
S3
36,783
-
36,711
a
n
S3
6,277
-
-
a
t
S3
36,243
-
-
ε
2
0
0
0
ε
3
831,47
830,363
831,385
Teoria Maszyn i Mechanizmów- projekt
nr.2A
17 z 21
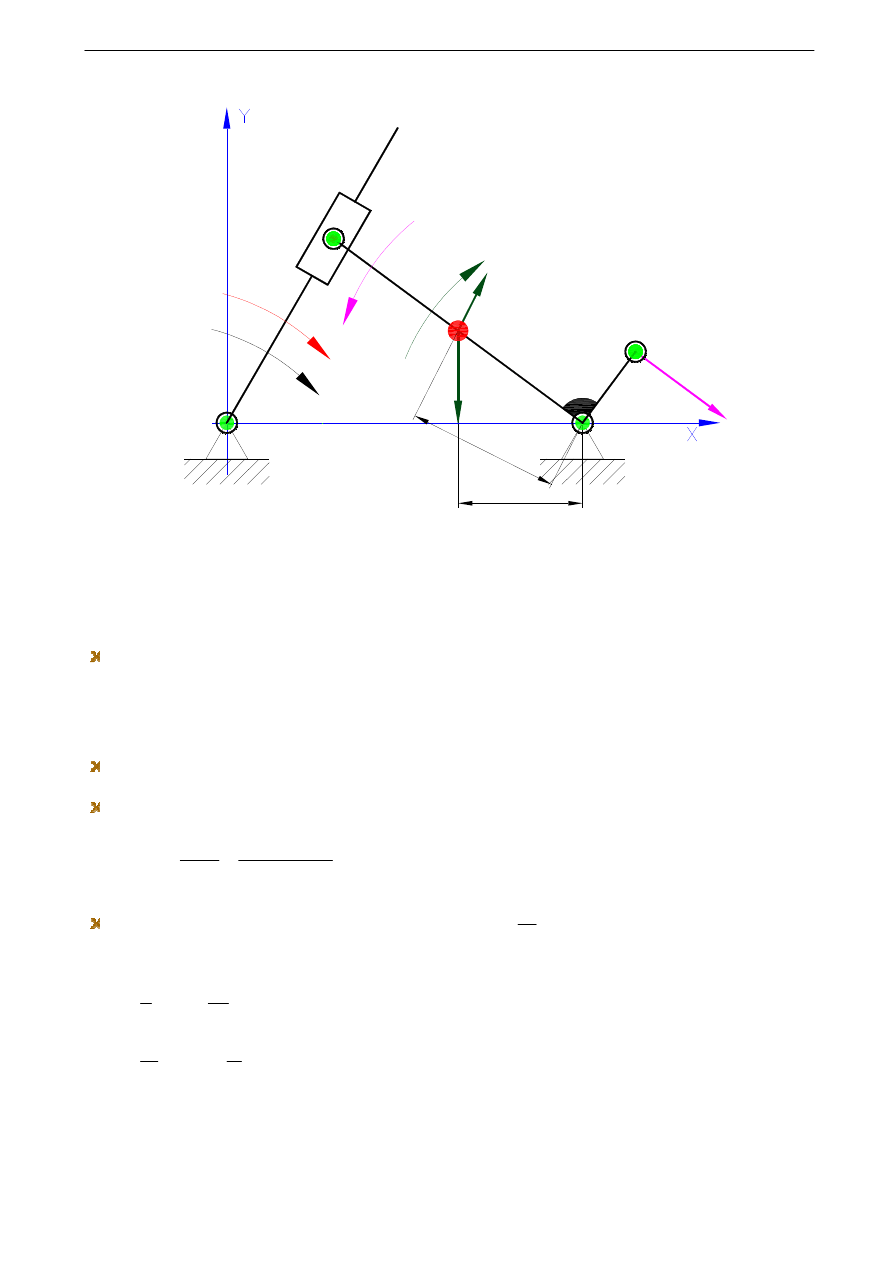
4
Analiza kinetostatyczna mechanizmu.
0,035[m]
B
3
P
3
G
3
M
R1
M
3
M
B3
W
1
B
0
C
S3
A
(
A
1
,
A
2
,
A
3
)
0,04
29[m
]
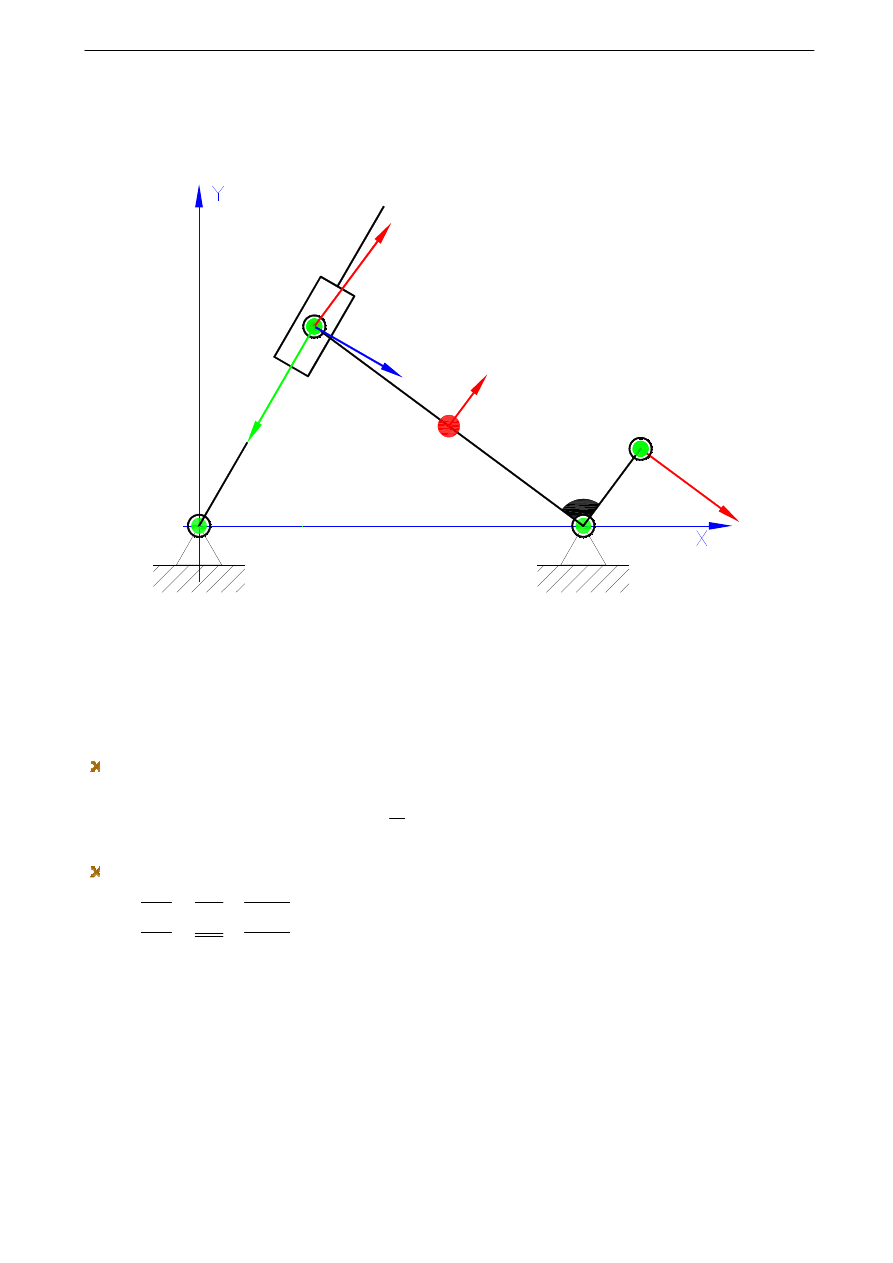
Rys. 9 .
Mechanizm do analizy kienteostatycznej
4.1
Założenia analizy:
Dla mechanizmu przyjmuje:
Warto
ś
ci sił obci
ąż
aj
ą
cych mechanizm:
P
3
=10N
M
3
=10Nm
Człon drugi mechanizmu posiada:
mas
ę
m
3
= 10kg
Moment bezwładno
ś
ci
J
S3
[
]
2
2
2
S3
006
,
0
12
00872
,
0
10
12
J
m
kg
l
m
⋅
=
⋅
=
⋅
=
Mechanizm znajduje si
ę
w polu grawitacyjnym
2
s
m
81
,
9
g
=
4.1.1
Wyznaczenie sił bezwładności działających na mechanizm:
Nm
M
J
M
N
B
a
m
B
B
S
B
s
992
,
4
832
006
,
0
367
10
7
,
36
3
3
3
3
3
3
3
3
=
⋅
=
⋅
=
=
⋅
=
⋅
=
ε
Teoria Maszyn i Mechanizmów- projekt
nr.2A
18 z 21
4.1.2
Wyznaczenie sil grawitacji działających na mechanizm:
N
G
g
m
G
1
,
98
10
81
,
9
3
3
3
=
⋅
=
⋅
=
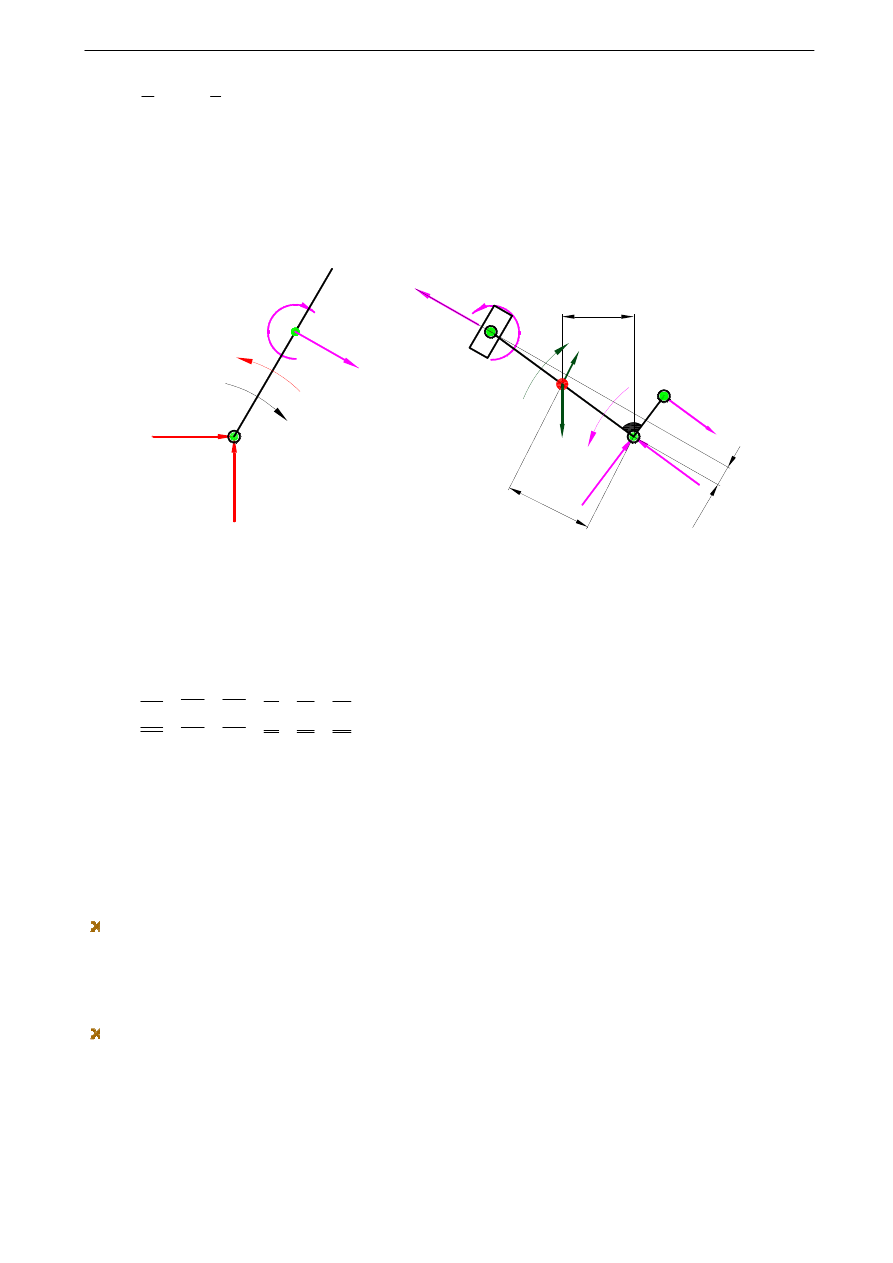
4.1.3
Odrzucenie członu napędzającego, oraz uwolnienie układu od więzów
0,035[m]
R
03
R
03
t
R
01
M
12
M
21
R
01
Y
X
B
3
P
3
G
3
M
3
M
B3
M
R1
W
1
R
12
R
21
n
0,04
295
[m]
0
,0
1
[m
]
Rys. 10 .
Uwolnienie układu od więzów (odrzucenie członu napędzającego)
4.1.4
Równanie wektorowe równowagi sił działających na grupę strukturalną
0
:
0
:
0
:
ln
.
3
3
3
03
03
23
32
12
3
3
3
03
03
12
=
+
+
+
+
+
=
+
=
+
+
+
+
+
G
B
P
R
R
R
trzeciego
człzło
dla
Równanie
R
R
drugiego
człzło
dla
Równanie
G
B
P
R
R
R
ej
struktura
gr
dla
Równanie
n
t
t
N
4.1.5
Wyznaczenie nieznanych reakcji z równań momentów i planu sił
Wyznaczenie nieznanej reakcji M
12
z równania momentów wzgl
ę
dem punktu B (dla członu
drugiego)
0
0
12
=
⇔
=
∑
M
M
iB
Wyznaczenie nieznanej reakcji R
12
z równania momentów wzgl
ę
dem punktu B
N
R
R
BC
P
M
l
B
l
G
M
l
R
M
B
G
B
R
iB
28
,
755
0
025
,
0
10
10
0429
,
0
367
035
,
0
1
,
98
992
,
4
01
,
0
0
|
|
0
12
12
3
3
3
3
3
3
3
12
12
=
=
⋅
+
−
⋅
+
⋅
−
+
⋅
−
=
⋅
+
−
⋅
+
⋅
−
+
⋅
−
⇔
=
∑
Teoria Maszyn i Mechanizmów- projekt
nr.2A
19 z 21
R
12
B
3
G
3
R
03
R
03
R
03
P
3
n
t
3
6
7
[N
]
19
6,
21
02
[N
]
76
9,8
74
9[
N
]
9
8
,1
[N
]
10
[N
]
755
,28
[N]
74
4,4
52
1[N
]
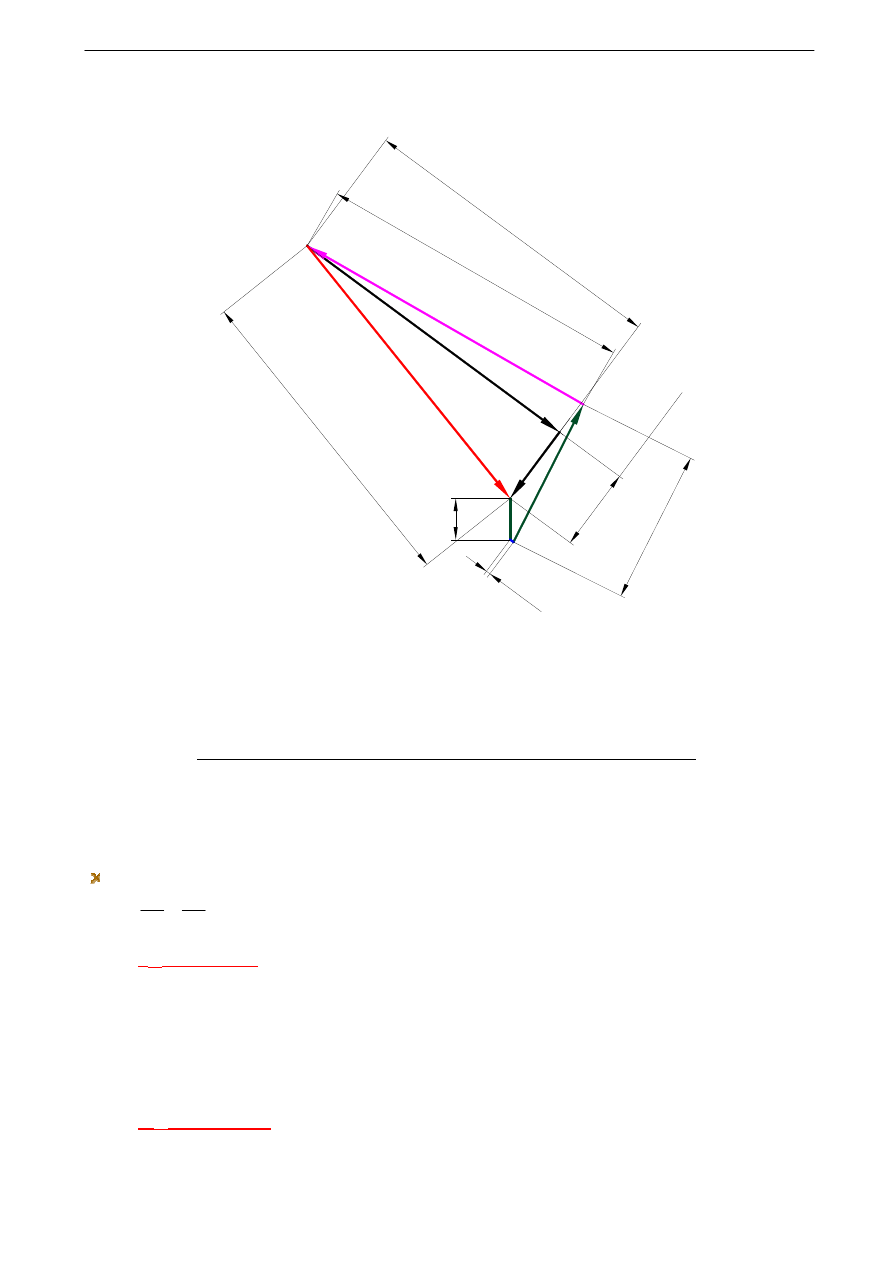
Rys. 11 .
Plan sił
Na podstawie planu sil wyznaczono
N
R
R
R
N
R
N
R
N
R
n
28
,
755
875
,
769
452
,
744
2102
,
196
32
23
12
03
03
03
=
=
=
=
=
=
τ
4.1.6
Wyznaczenie siły równoważącej, oraz sił reakcji działających na człon
napędzający
Plan sił dla czlonu napędzającego
0
01
21
=
+
R
R
P
01
=755,28 [N]
Wyznaczenie momentu równoważącego M
R1
Nm
M
M
OA
R
M
R
R
iA
32
,
45
0
|
|
1
1
21
=
=
+
⋅
−
⇔
∑
M
R1
=45,32 [Nm]
Teoria Maszyn i Mechanizmów- projekt
nr.2A
20 z 21
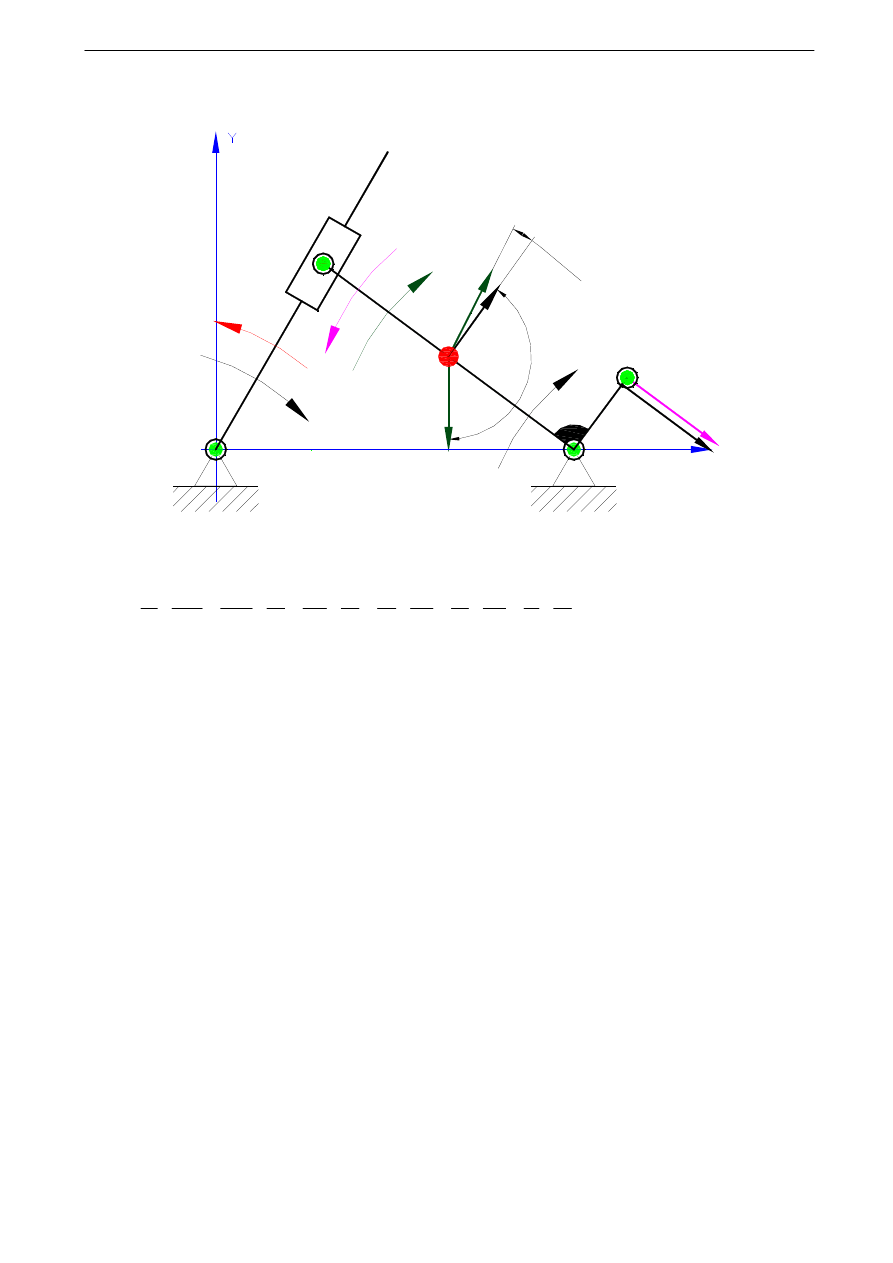
4.2
Wyznaczenie siły równoważącej działającej na człon metoda mocy
chwilowych
1
4
4
,3
6
°
8,8
82
9°
V
S3
P
3
G
3
M
R1
M
3
M
B3
W
1
W
3
V
C
B
3
Rys. 12 .
Mechanizm do analizy metodą mocy chwilowych
Nm
M
M
V
P
V
B
V
G
M
M
M
V
P
V
B
V
G
M
M
M
V
P
V
B
V
G
M
M
M
R
R
C
S
S
B
R
C
S
S
B
R
C
S
S
B
R
999
,
44
0
3
,
0
10
8829
,
8
cos
52
,
0
367
36
,
144
cos
52
,
0
1
,
98
12
10
12
992
,
4
2
0
8829
,
8
cos
36
,
144
cos
0
0
cos
8829
,
8
cos
36
,
144
cos
180
cos
0
cos
0
cos
0
1
1
3
3
3
3
3
3
3
3
3
1
1
3
3
3
3
3
3
3
3
3
1
1
3
3
3
3
3
3
3
3
3
1
1
=
=
⋅
+
°
⋅
⋅
+
°
⋅
⋅
+
⋅
−
⋅
+
⋅
−
=
⋅
+
°
⋅
⋅
+
°
⋅
⋅
+
⋅
−
⋅
+
⋅
−
=
°
⋅
⋅
+
°
⋅
⋅
+
°
⋅
⋅
+
°
⋅
⋅
+
°
⋅
⋅
+
°
⋅
⋅
=
+
+
+
+
+
ω
ω
ω
ω
ω
ω
ω
ω
ω
o
o
o
o
o
o
Teoria Maszyn i Mechanizmów- projekt
nr.2A
21 z 21
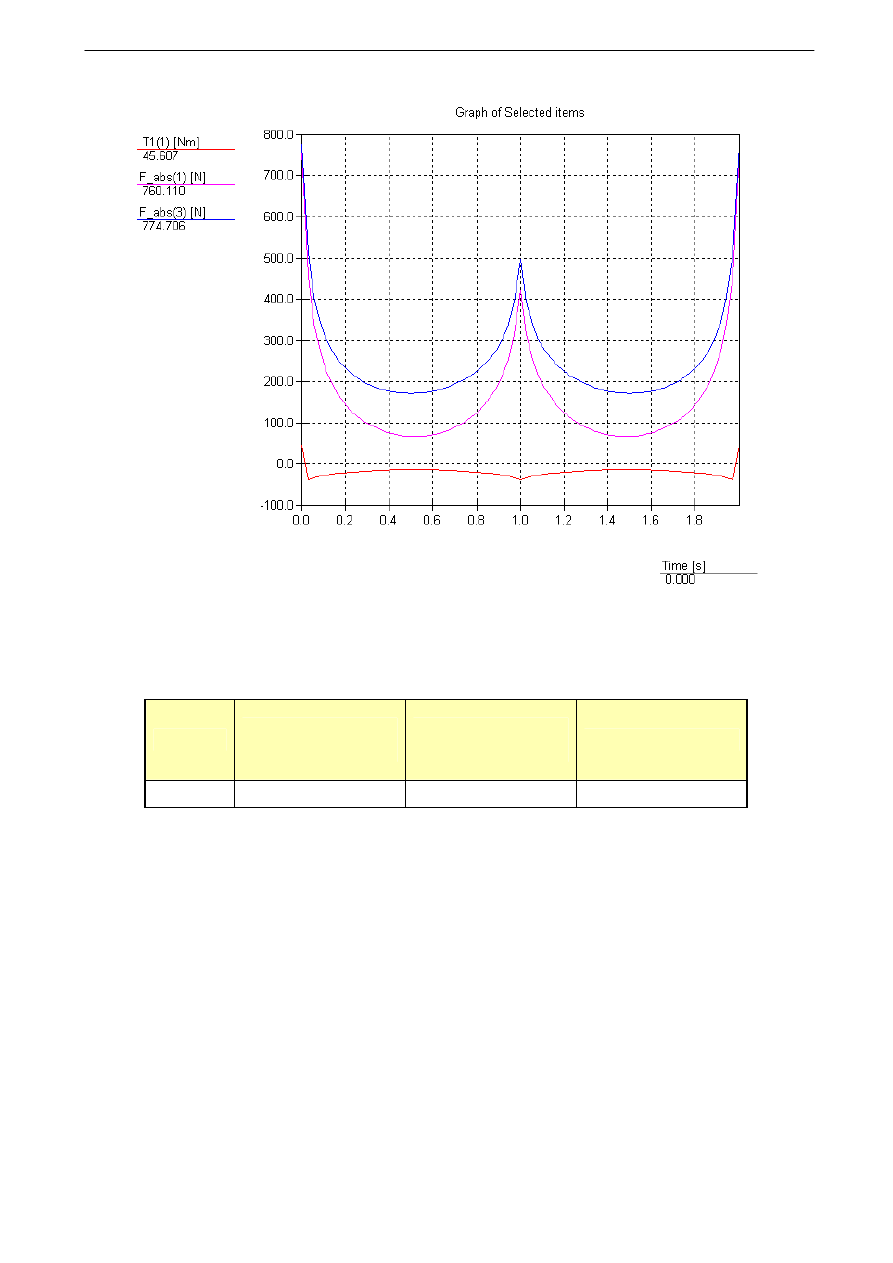
4.3
Analiza kinetostatyczna w SAMIE
Rys. 13 .
Wyniki analizy
4.4
Podsumowanie analizy kinetostatycznej
Metoda
wykreślna
Metoda mocy
chwilowych
SAM
M
R1
45,32
44,999
45,607
Wyszukiwarka
Podobne podstrony:
Kolos ekonimika zloz II 2 id 24 Nieznany
kolokwium organiczna II id 2408 Nieznany
ASW CANTIUS II id 71219 Nieznany
więcej podobnych podstron