NAPĘD I STEROWANIE MASZYN I URZĄDZEŃ
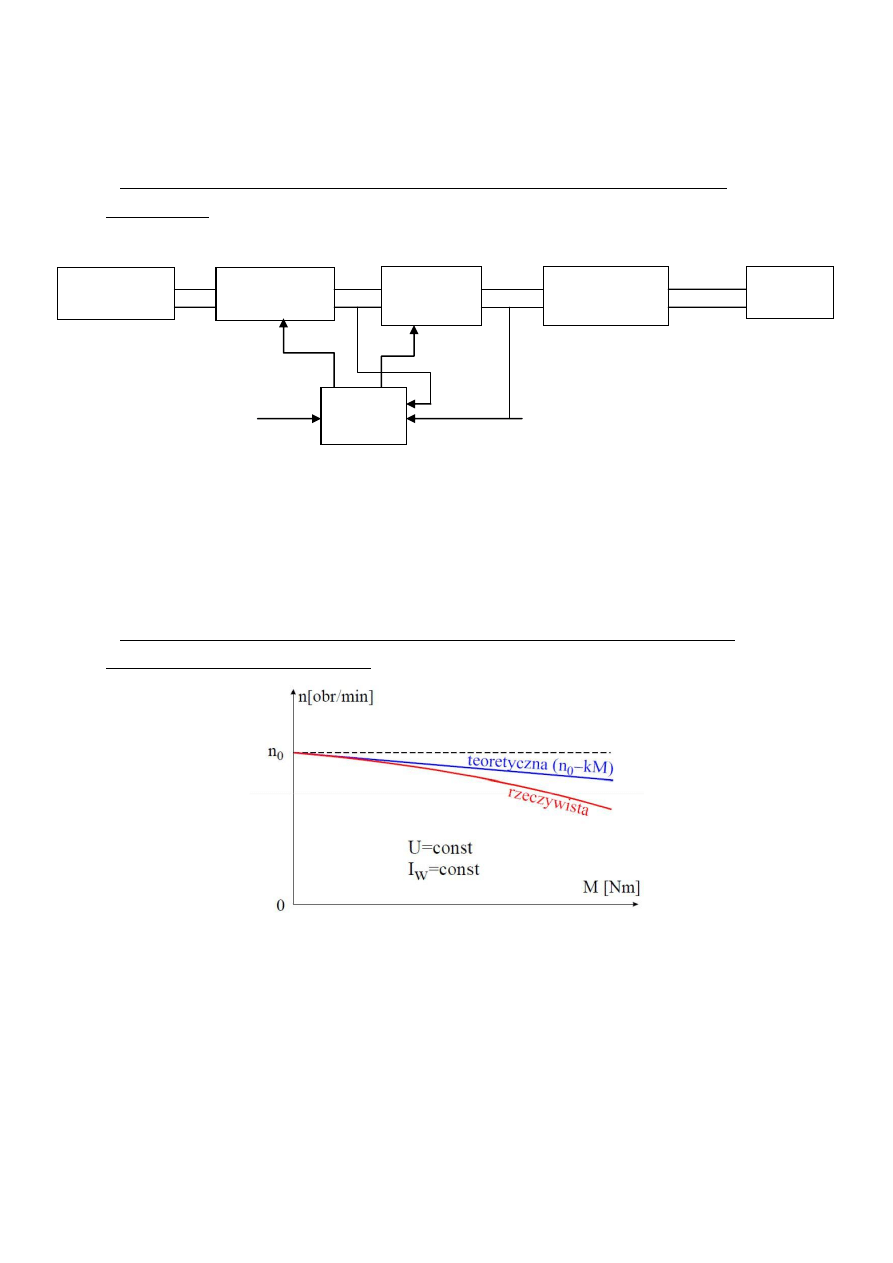
1. Przedstaw schemat blokowy ogólnej struktury układu sewonapędowego z silnikiem
elektrycznym.
Uze
Us
Me, We
Mm, Wm
S1
S2
SS
Sz
Uze – napięcie źródła energii
Us – napięcie na zaciskach silnika
SS, S1, S2 – sygnały sterujące
Sz – sygnały sprzężeń zwrotnych
2. Narysuj charakterystykę mechaniczną silnika prądu stałego (bocznikowego) i silnika
indukcyjnego (klatkowego) M= f(n).
silnik prądu stałego
Źródło energii
elektrycznej
Przekształtnik
energii
Silnik
elektryczny
Przekładnia
mechaniczna
Maszyna
robocza
Układ
sterujący
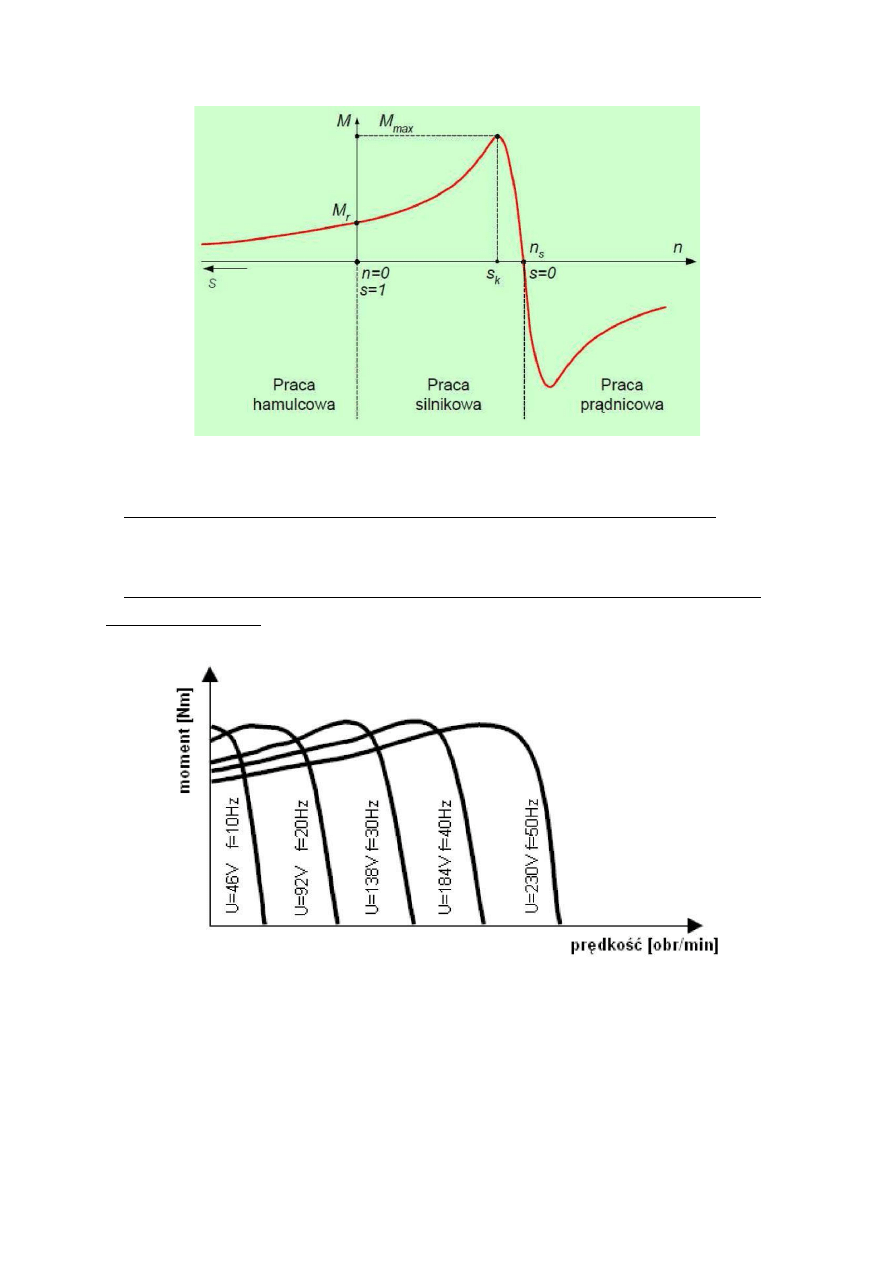
silnik indukcyjny
3. Wymień znane ci sposoby regulacji prędkości silnika indukcyjnego (klatkowego).
Zmiana liczby par biegunów
Zmiana częstotliwości zasilania
4. Charakterystyki mechaniczne i zasada częstotliwościowej regulacji prędkości obrotowej
silnika indukcyjnego.
Zasada częstotliwościowej regulacji prędkości obrotowej:
Częstotliwość zasilania wpływa na prędkość wirowania pola magnetycznego wytwarzanego
w stojanie, czyli na prędkość synchroniczną silnika. Zmieniając jej
wartość możemy płynnie zmieniać prędkość silnika w zakresie od postoju do
prędkości nawet przekraczającej prędkość znamionową (przekraczając prędkość
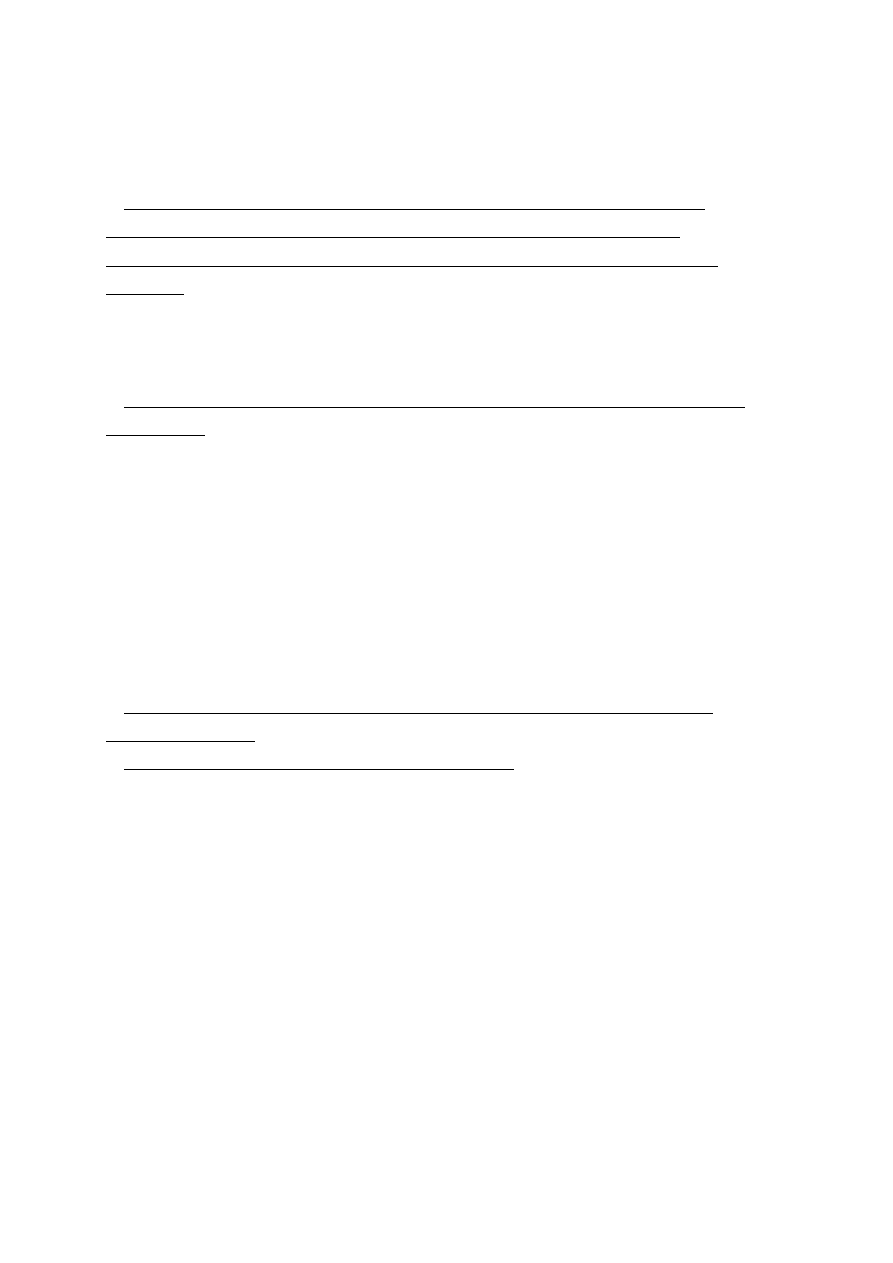
znamionową trzeba wziąć pod uwagę wytrzymałość mechaniczną silnika i wytrzymałość
elektryczną izolacji).
5. Silnik indukcyjny klatkowy pracuje obciążony stałym niezależnym od prędkości
momentem 0,5 N M ( N M -moment znamionowy silnik zasilany jest napięciem
o częstotliwości znamionowej. W jakim przypadku nastąpi większy spadek prędkość
obrotowej:
a) przy spadku napięcia zasilania o 10%,
b) przy spadku częstotliwości zasilania o 10%.
6. Jakie parametry znamionowe silnika uwzględniamy podczas doboru silnika do układu
napędowego?
Moc znamionowa silnika - musi być tak dobrana, by w danych warunkach
pracy silnik nie nagrzewał się nadmiernie a moment maksymalny silnika był większy od
momentu maksymalnego przewidywanego obciążenia.
Metoda prądu zastępczego polega na wyznaczeniu prądu Iz , ktory płynąc przez
uzwojenie silnika, wytwarza taką samą ilość ciepła jak zmienny w czasie prąd
rzeczywisty. (silnik indukcyjny)
Metoda momentu zastępczego polega na wyznaczeniu momentu zastępczego Mz,
przy założeniu że moment obrotowy jest liniową funkcją prądu. (silnik indukcyjny)
7. Oblicz moment znamionowy Mn dla silnika o parametrach Pn= 10kW, nn = 1450
obr./min., ηn = 0,95.
8. Wymień wady i zalety napędu z silnikiem krokowym.
Zalety:
● Moment trzymający, bezprądowy moment spoczynkowy (detent torque),
silniki wyposażone w magnes trwały,
● Silnik pracuje z pełnym momentem w stanie spoczynku (o ile uzwojenia są
zasilane),
● Precyzyjne pozycjonowanie i powtarzalność ruchu dobre silniki krokowe mają dokładność
ok. 3 5% kroku i błąd ten nie kumuluje się z kroku na krok. Krok podstawowy, rozdzielczość
kątowa kroku : 15°, 7.5°, 3.6 °, 1.8°, 0.9 ° ( liczba krokow: 24, 48, 100, 200, 400)
● Szeroki zakres prędkości obrotowych uzyskiwany dzięki temu, że prędkość jest
proporcjonalna do częstotliwości impulsow wejściowych,
● Możliwość bardzo szybkiego rozbiegu, hamowania i zmiany kierunku.
● Niezawodny ze względu na brak szczotek, żywotność silnika zależy zatem tylko od
żywotności łożysk.
● Możliwość osiągnięcia bardzo niskich prędkości synchronicznych obrotow z obciążeniem
umocowanym bezpośrednio na osi.
● Jedną z najbardziej znaczących zalet silnika krokowego jest możliwość dokładnego
sterowania w pętli otwartej co oznacza, że nie potrzeba sprzężenia zwrotnego informacji o
położeniu. Eliminuje to potrzebę stosowania kosztownych urządzeń sprzężenia zwrotnego,
takich jak enkodery optoelektroniczne. Pozycje określa się zliczając impulsy wejściowe.
Wady:
● Rezonanse mechaniczne pojawiające się przy niewłaściwym sterowaniu.
● Trudności przy pracy z bardzo dużymi prędkościami.
● Malejący moment obrotowy wraz ze wzrostem prędkości obrotowej.
9. Metody sterowania silnikiem krokowym, wymień rodzaje sterowań i ich właściwości.
Wśród silników krokowych można wyróżnić dwa podstawowe typy: unipolarne i bipolarne.
Zaleta sterowania bipolarnego – dobre wykorzystanie momentu obrotowego dzięki
temu, że całe uzwojenie jest w stanie prądowym po otrzymaniu impulsu.
Wada sterowania bipolarnego – bardziej rozbudowany układ sterowania.
Zaleta wariantu unipolarnego - prostszy układ połączeń i mniejsza liczba
tranzystorów.
Wada sterowania unipolarnego – jednocześnie pracuje tylko połowa uzwojenia, a
zatem nie wytwarza się moment obrotowy o pełnej wartości.
RODZAJE STEROWANIA (KROK, ALGORYTMY KOMUTACJI) :
falowe - W sterowaniu falowym - jednofazowym w danym momencie zasilana jest
jedna faza. Wada: Silniki o uzwojeniach unipolarnych wykorzystują tylko 25%, a o
uzwojeniach bipolarnych 50% całkowitego uzwojenia silnika w danej chwili czasu.
Nie wykorzystuje się maksymalnego momentu wyjściowego silnika.
pełnokrokowe - W sterowaniu pełnokrokowym (dwufazowym) w każdej chwili czasu
zasilane są dwie fazy. Wynikiem tego rodzaju sterowania są takie same ruchy jak przy
sterowaniu jednofazowym z tym, że pozycja wirnika jest przesunięta o pół kroku.
półkrokowe - jest kombinacją sterowania dwufazowego i jednofazowego. Co drugi
krok jest zasilana tylko jedna faza, a w pozostałych krokach dwie fazy.
mikrokrokowe - w sterowaniu mikrokrokowym prądy w uzwojeniach zmieniają się
płynnie rozbijając w ten sposób pełny krok na wiele mniejszych. Dzięki pracy z
mikrokrokiem możliwe jest uzyskanie płynniejszej pracy i dokładniejszego
pozycjonowania. Istnieje wiele różnych typów mikrokroków o podziale od 1/3 do
1/256 pełnego kroku lub jeszcze większym.
10. Wyjaśnij termin silnik BLCD.
Nazwa ta wynika z angielskiego określenia brushless DC motor i jest powszechnie używana.
Często też mowiąc o silnikach BLDC używa się wyrażenia ''silnik z komutacją
elektroniczną''.
11. Wymień głowne zalety silnika bezszczotkowego.
● bardzo duża sprawność,
● liniowa charakterystyka mechaniczna,
● wysoki stosunek momentu rozwijanego do gabarytow,
● brak komutatora,
● bardzo mała inercja wirnika.
12. Narysuj przykładowy schemat blokowy napędu hydraulicznego.
13. Podaj przynajmniej po trzy wady i zalety napędów hydrostatycznych w porównaniu
z napędami elektrycznymi.
Zalety:
Duża dokładność pozycjonowania,
Duża niezawodność,
Duże przenoszone moce,
Iskrobezpieczeństwo,
Duży współczynnik wzmocnienia (rozumiany jako stosunek mocy sygnału
wyjściowego do mocy sygnału wejściowego (~108),
Mała wrażliwość na zakłocenia,
Prostota obsługi,
Relatywnie mała zależność właściwości od obciążeń.
Wady:
Wycieki czynnika roboczego,
Występowanie zjawiska obliteracji (powodując zmniejszanie światła kanałów
przepływowych),
Znaczne koszty budowy i eksploatacji.
14. Wymień i opisz funkcje podzespołów wchodzących w skład zasilacza hydraulicznego.
Pompa - jej zadaniem jest zamiana energii mechanicznej dostarczonej z zewnątrz na
energię ciśnienia cieczy roboczej. Zasada działania pompy wyporowej polega na
przetłaczaniu dawek cieczy z przestrzeni ssawnej do tłocznej za pomocą elementow
wyporowych.
Silnik - zadaniem silnika wyporowego, nazywanego najczęściej silnikiem
hydraulicznym, jest zamiana energii ciśnienia cieczy na energię mechaniczną ruchu
obrotowego. Zasada działania silnika jest odwroceniem zasady działania pompy
wyporowej.
Manometr
Regulator ciśnienia - zadaniem elementow sterujących ciśnieniem – nazywanych
skrótowo zaworami ciśnieniowymi – jest wpływanie w określony sposob na wartość
ciśnienia w układzie hydrostatycznym lub jego części.
Zawór przelewowy – jest on jedną z dwóch odmian funkcjonalnych (ze względu na
charakter pracy) zaworów maksymalnych, których podstawowym zadaniem jest
zabezpieczenie układu hydrostatycznego lub jego części przed wzrostem ciśnienia
ponad dopuszczalną wartość.
15. Jakie zadanie w układzie hydraulicznym spełniają rozdzielacze hydrauliczne, jak mogą
być sterowane?
Sterujemy za ich pomocą kerunkiem przepływu czynnika roboczego.
Ze względu na rodzaj sygnału sterującego rozróżniamy:
1. Rozdzielacze sterowane mechanicznie.
2. Rozdzielacze sterowane hydraulicznie i pneumatycznie.
3. Rozdzielacze sterowane elektrycznie.
4. Rozdzielacze o sterowaniu mieszanym np. elektrohydraulicznym.
16. Zdefiniować, podać jednostki: wydajność teoretyczną pompy, wydajność jednostkową
pompy, wydajność rzeczywistą pompy, sprawność ogolną (całkowitą) pompy, moc
otrzymywaną z pompy (efektywną).
Wydajność teoretyczna (idealna) pompy Q,p [l/min] jest to objętościowe natężenie
przepływu cieczy, jakie pompa dostarczałaby, gdyby nie istniały wewnątrz niej żadne
przecieki, zwane stratami objętościowymi.
Wydajność jednostkowa – jest to ilość cieczy podana do przewodu tłocznego w
trakcie 1 obrotu przy cśnieniu w przewodzie tłocznym równym ciśnieniu w
przewodzie spływowym. Jednostka: [m3/obr]
Wydajność rzeczywista pompy Qp [l/min] jest to objętościowe natężenie przepływu
cieczy dostarczane przez pompę.
Sprawność całkowita pompy – 𝜂 =
𝑃
𝑜𝑡𝑟𝑧
𝑃
𝑑𝑜𝑠𝑡
[%] - jest to iloraz mocy na wyjściu do mocy
dostarczonej na wale.
Moc efektywna pompy – moc netto zużyta na zwiększenie energii płynu [kW].
17. Przedstaw przykładowe zastosowanie i opisz sposob działania (elementy składowe)
układu przedstawionego na rysunku:
18. Zdefiniować, podać jednostki: a) chłonność teoretyczną silnika, b) sprawność
rzeczywistą silnika, c) chłonność jednostkową silnika.
a) chłonność teoretyczna (idealna) silnika Qts [l/min] jest to objętościowe
natężenie przepływu cieczy, jakie płynęłoby przez silnik, gdyby nie istniały
wewnątrz silnika żadne przecieki, ani inne zjawiska powodujące zwiększenie chłonności
silnika
b) sprawność rzeczywista silnika – jest to stosunek chłonności rzeczywistej do
teoretycznej [%]
c) chłonność jednostkowa qh – minimalna ilość cieczy pobrana z przewodu tłocznego w
trakcie jednego obrotu wałka wyjściowego, przy cśnieniu w przewodzie tłocznym
równym ciśnieniu w przewodzie spływowym; [mm3/obr], [dm3/obr]
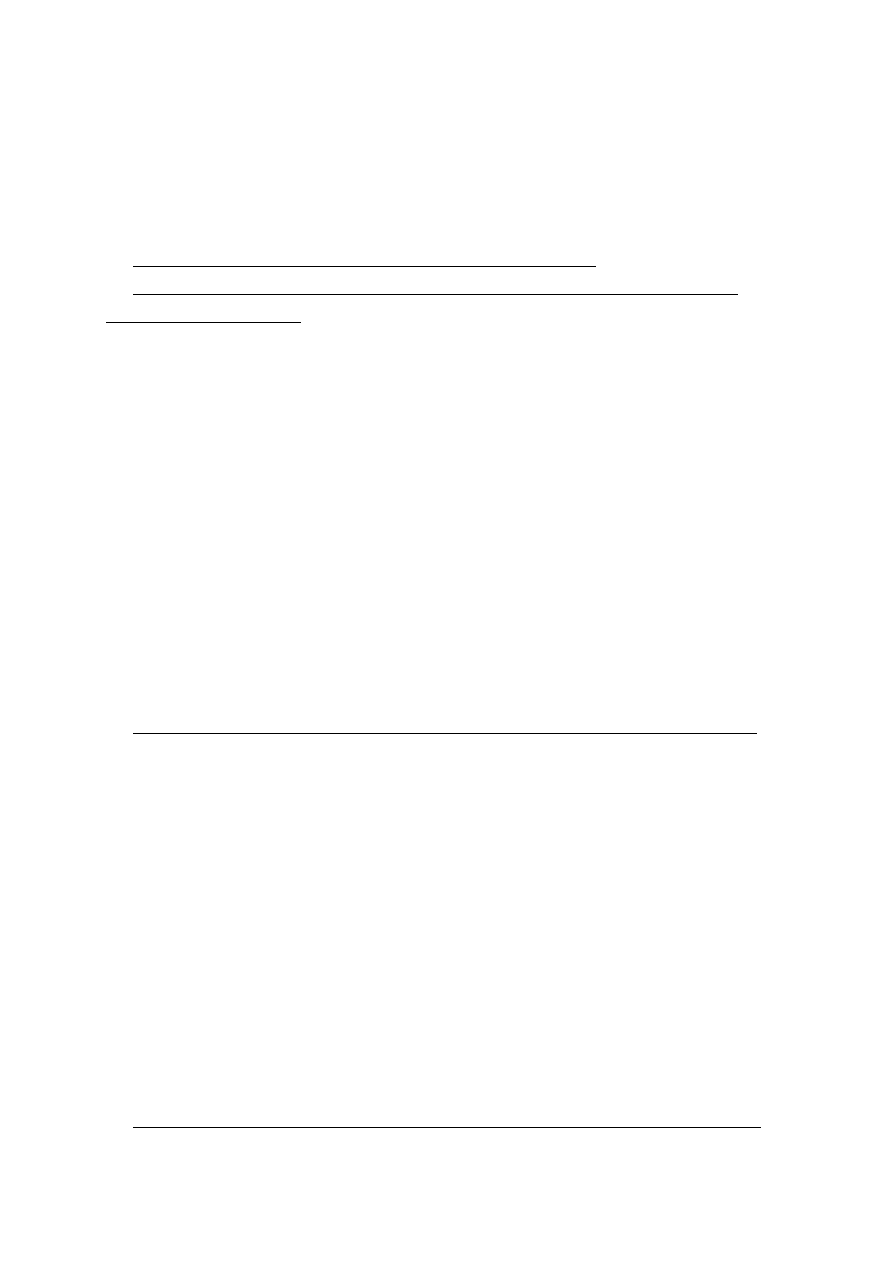
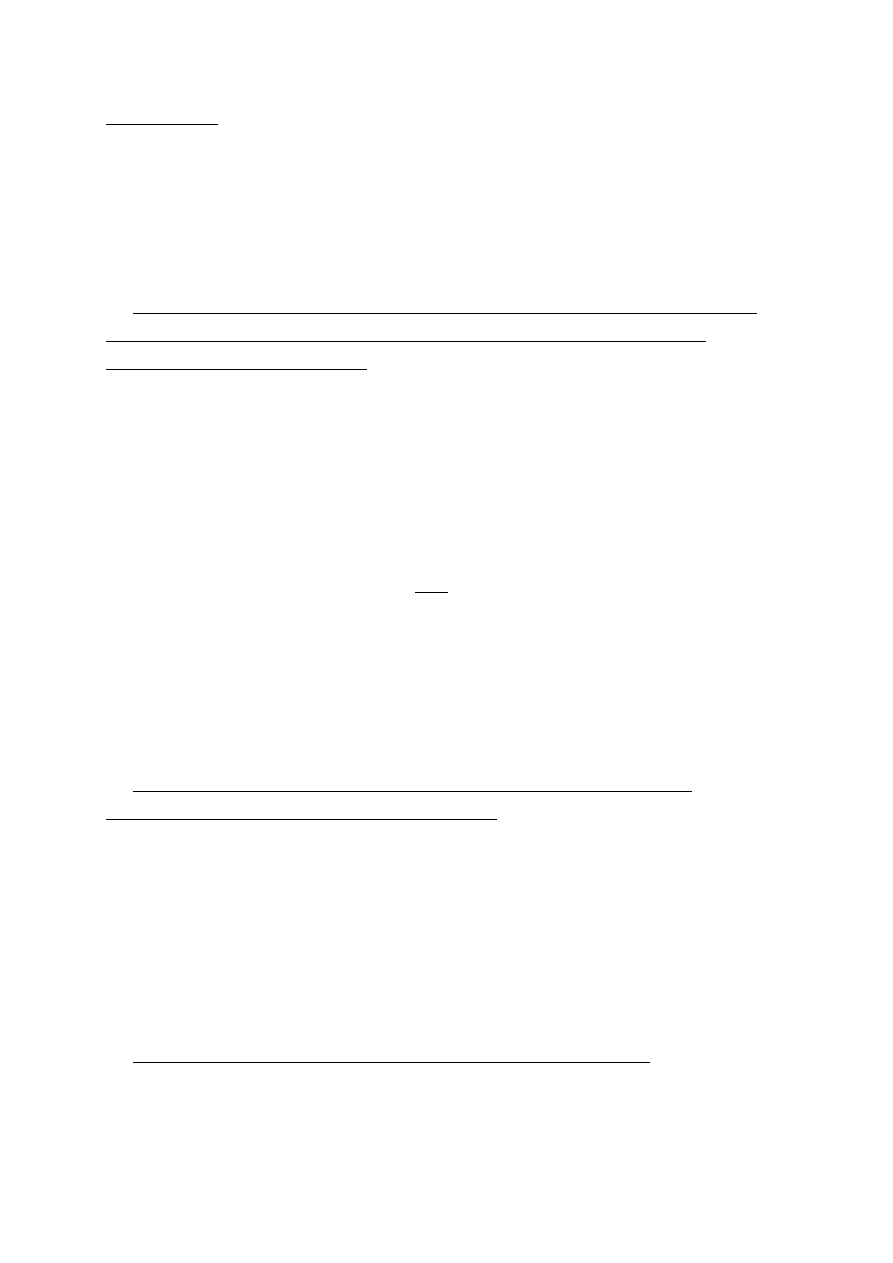
19. Narysuj charakterystyki przepływowe statyczne zaworu przelewowego.
jednostopniowego
dwustopniowego
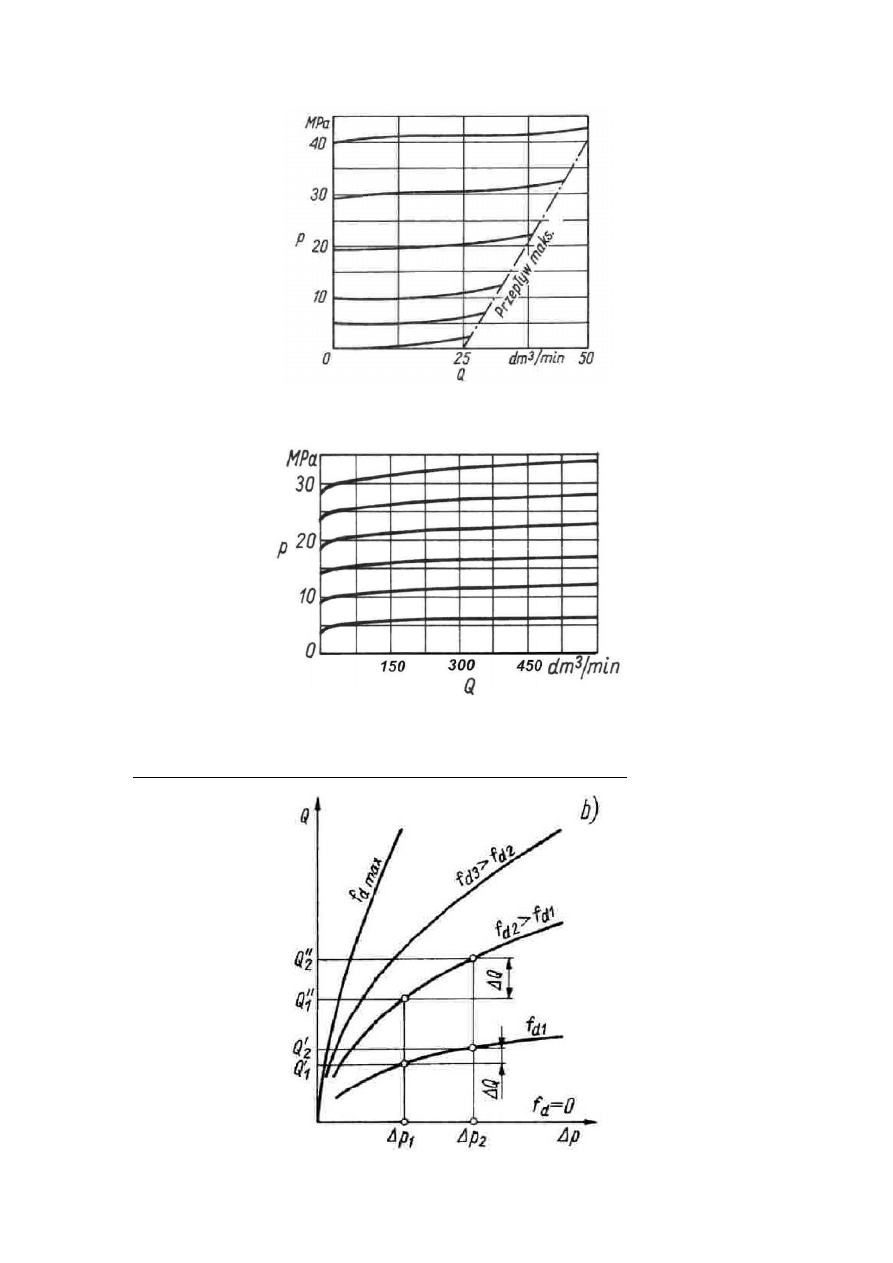
20. Narysuj charakterystyki przepływowe statyczne zaworu dławiącego.
21. Wymień znane ci rodzaje prowadnic i porownaj ich właściwości.
a) prowadnice ślizgowe:
typu „jaskółczy ogon”
prostokątne
walcowe
Są konstrukcyjnie najprostsze, co nie oznacza, że ich właściwe wykonanie jest łatwe i
tanie. Ze wszystkich typow prowadnic charakteryzują się – w okresie swego
prawidłowego działania – największą sztywnością , tj. najmniejszym ugięciem
pod działaniem obciążenia.
Największą z kolei ich wadę stanowi duży i nierownomierny opor ruchu,wymagający
kosztownych jednostek napędowych o dużej mocy oraz powodujący szybkie
zużywanie się wspołpracujących elementow.
Inne problemy związane ze stosowaniem prowadnic ślizgowych to:
• Drgania cierne i niszczenie podczas montaż u oraz docierania
• Bicie, zarysowania, szybkie zniszczenie – konieczność względnie częstej,
kosztownej i czasochłonnej wymiany
• Krotka żywotność pod wysokim obciążeniem
• Krotka żywotność oraz niedostateczne smarowanie wynikające z wilgotności
środowiska
• Korozja cierna.
b) prowadnice toczne
Łożyskowanie w takiej prowadnicy wykazuje 50-krotnie mniejszy
wspołczynnik tarcia niż przy łożyskowaniu ślizgowym.
Rożnica pomiędzy tarciem statycznym i dynamicznym jest niewielka, przy
tym siła ruchu jałowego jest niewiele większa od siły ruchu przy obciążeniu
znamionowym.
Nie występują efekty drgań ciernych.
Dzięki niskim wspołczynnikom tarcia potrzebne są małe siły napędowe, siła
napędowa pozostaje stała w obu kierunkach, wymaga tylko minimalnego
smarowania, montaż profilowej prowadnicy szynowej jest bardzo łatwy.
22. Od jakich parametrow pracy zależy żywotność prowadnicy?
Żywotność bez uwzględnienia wspołczynnika pracy:
𝐿 = (
𝐶𝑑𝑦𝑛
𝑃
)
3
L – znamionowa żywotność dla 50km
Cdyn – dynamiczna nośność [N]
P - dynamiczne ekwiwalentne obciążenia [N]
𝐿 = (
𝑓
𝐻
∙ 𝑓
𝑇
∙ 𝐶
𝑑𝑦𝑛
𝑓
𝑊
∙ 𝑃
)
3
𝑓
𝐻
- wsp. twardości
𝑓
𝑇
- wsp. temperaturowy
𝑓
𝑊
– wsp. udaru
Wyszukiwarka
Podobne podstrony:
Napęd i sterowanie maszyn odpowiedzi
napęd hydrostatyczny podstawy, Komp, Maszyny, Sterowanie maszyn i urządzeń
Opracowanie Napędy i sterowanie maszyn (1)
Opracowanie pytań na egzamin z Systemów Sterowania Maszyn i Robotów u Salamandry
maszynoznawstwo odpowiedzi, Energetyka pwr 1 semestr
Opracowanie Napędy i sterowanie maszyn (1)
Pytania na drugi stopień MBM Sterowanie Maszyn i Urządzeń, Komp, Maszyny, Sterowanie maszyn i urządz
Elementy systemów sterowania maszyn zwiazane z bezpieczenstwem
elementy hydrauliczne symbole, Komp, Maszyny, Sterowanie maszyn i urządzeń
Maszynoznastwo odpowiedzi na pytania, studia materiały, Masyznoynastwo
sterowanie maszyn i urz
Sterowanie dławieniowe szeregowe, PWr Mechaniczny [MBM], Semestr 8, Sterowanie maszyn i urządzeń, St
SMATR devolt, AiR WIP dzienne inżynierskie, SMATR - sterowanie maszyn technologicznych i robotów
PROJEKTOWANIE UKŁADÓW STEROWANIA MASZYN
Sterowanie Maszyn i Urządzeń 2012 Pytania, PWr Mechaniczny [MBM], Semestr 8, Sterowanie maszyn i urz
Maszyny 1 odpowiedzi
(Sterowanie robotów odpowiedzi)
więcej podobnych podstron