Opracowanie Napędy i sterowanie maszyn
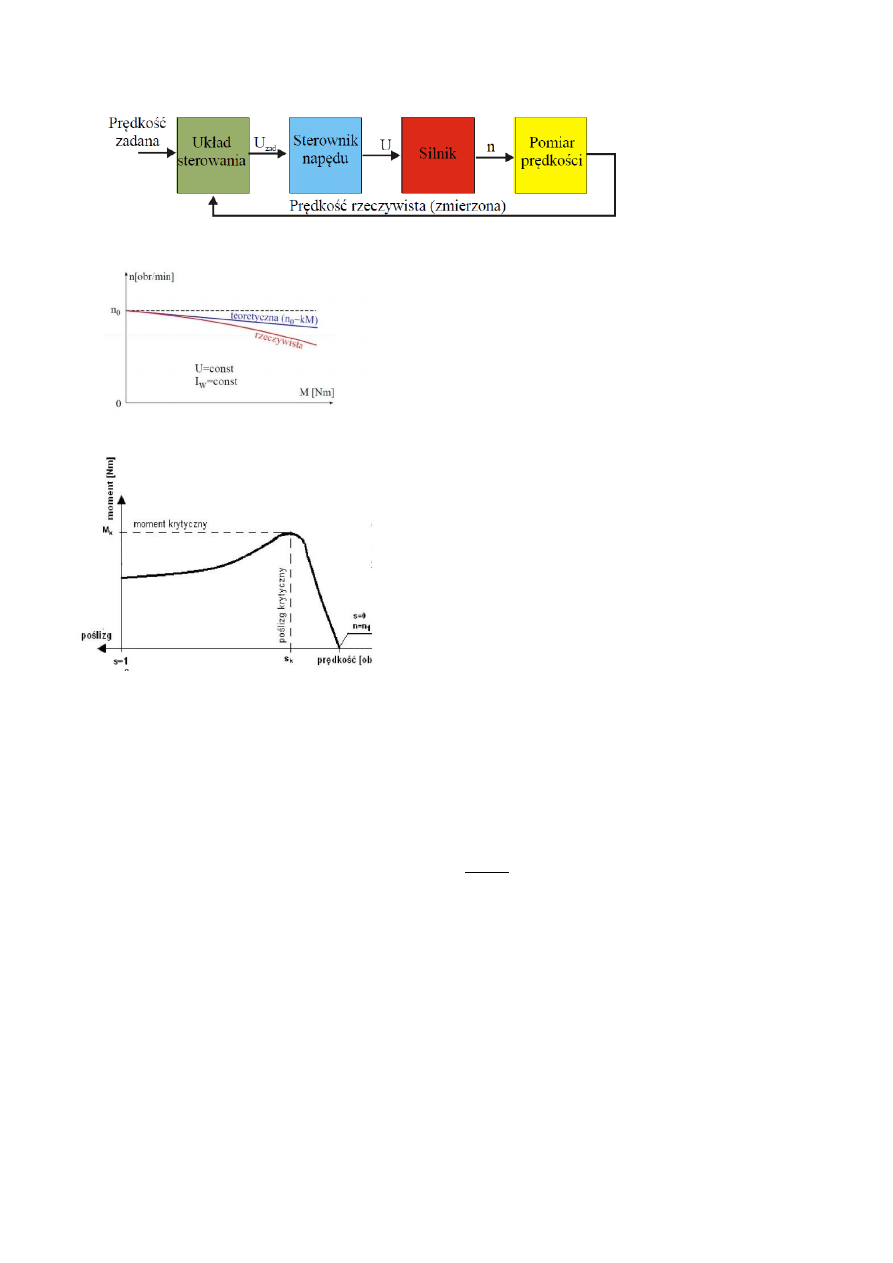
1. Przedstaw schemat blokowy ogólnej struktury układu serwonapędowego z silnikiem elektrycznym
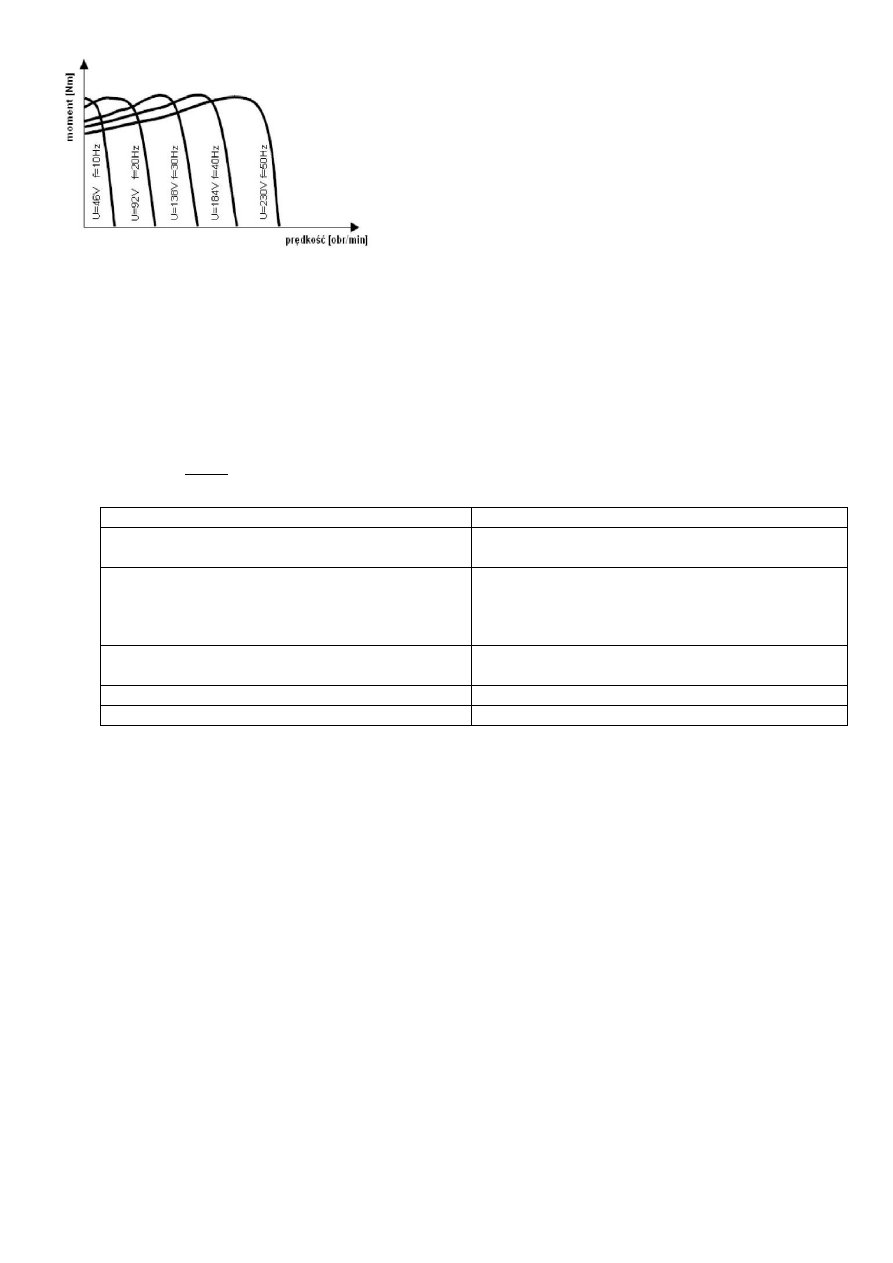
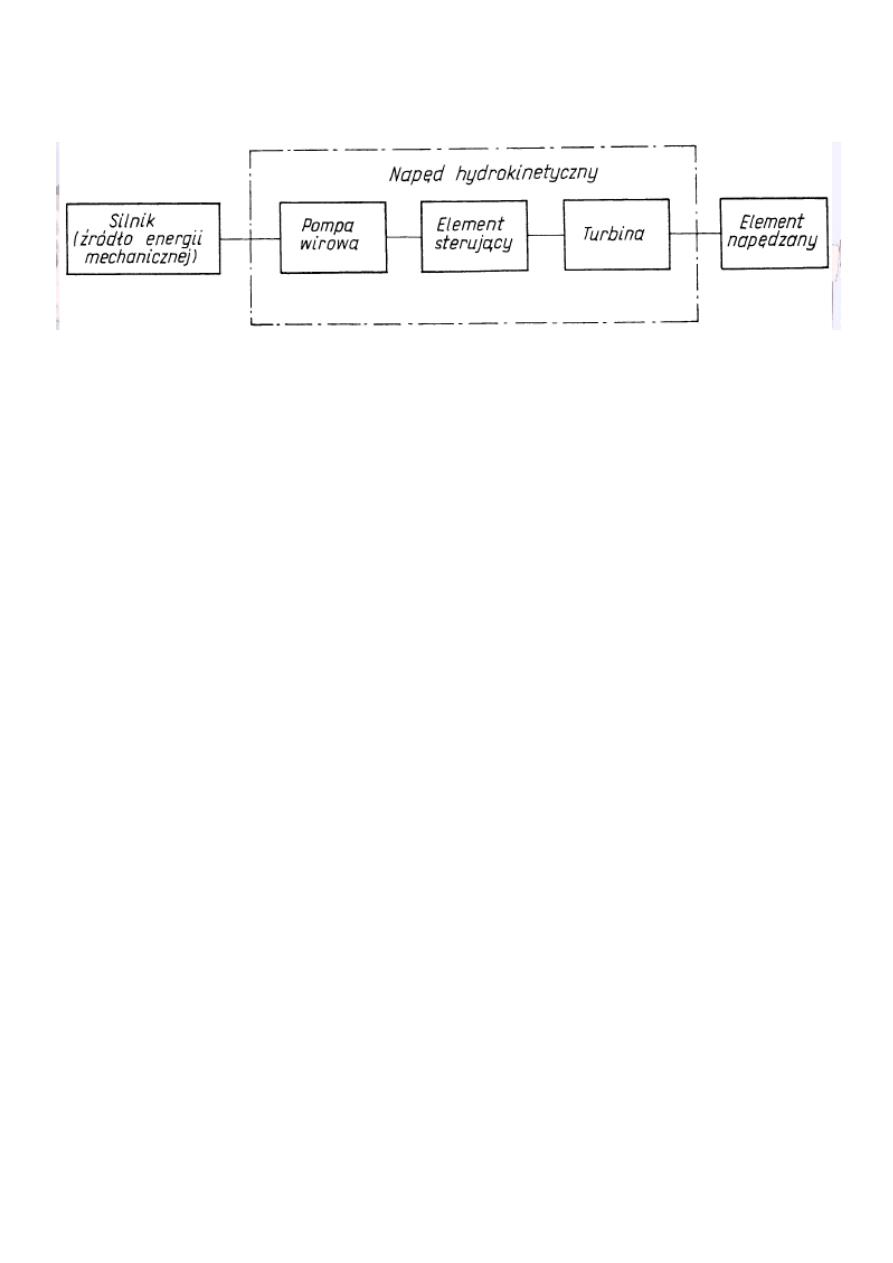
2. Narysuj
charakterystykę
mechaniczną
silnika
prądu
stałego
(bocznikowego)
i
silnika
indukcyjnego(klatkowego).
charakterystyka
silnika
bocznikowego
(prądu
stałego)
charakterystyka
mechaniczna
silnika
indukcyjnego
3. Wymień znane Ci sposoby regulacji silnika indukcyjnego.
Prędkość obrotowa tego silnika jest zależna od jego obciążenia i jego zwiększenie zmniejsza jego prędkość
obrotową, przez co rośnie nam moment, jednak nie jest to sposób regulacji ponieważ zależy nam na tym aby
przy określonych parametrach zasilania i obciążenia była możliwość regulacji prędkości obrotowej. Z
zależności na poślizg i odpowiednim jej przekształceniu:
𝑛 = 𝑛
𝑠
(1 − 𝑠) =
60 ∗ 𝑓
𝑝
∗ (1 − 𝑠)
Jak widać po przekształceniu prędkość obrotowa zależy od częstotliwości f, liczby par nabiegunników p oraz
poślizgu s.
Realizacja zmiany prędkości obrotowej przez zmianę liczby par nabiegunników jest realizowana przez
umieszczenie w stojanie kilku niezależnych uzwojeń o różnej liczbie par nabiegunników (jednak nie więcej niż
2) lub jedno uzwojenie o przełączalnej liczbie par nabiegunników. Ten sposób umożliwia tylko skokową
zmianę prędkości obrotowej, wykonywane są wyłącznie jako klatkowe.
Częstotliwość wpływa na prędkość wirowania pola magnetycznego wytwarzanego w stojanie czyli prędkość
synchroniczną. Zmieniając częstotliwość możemy płynnie regulować prędkością obrotową od postoju po
prędkości ponad znamionowe.
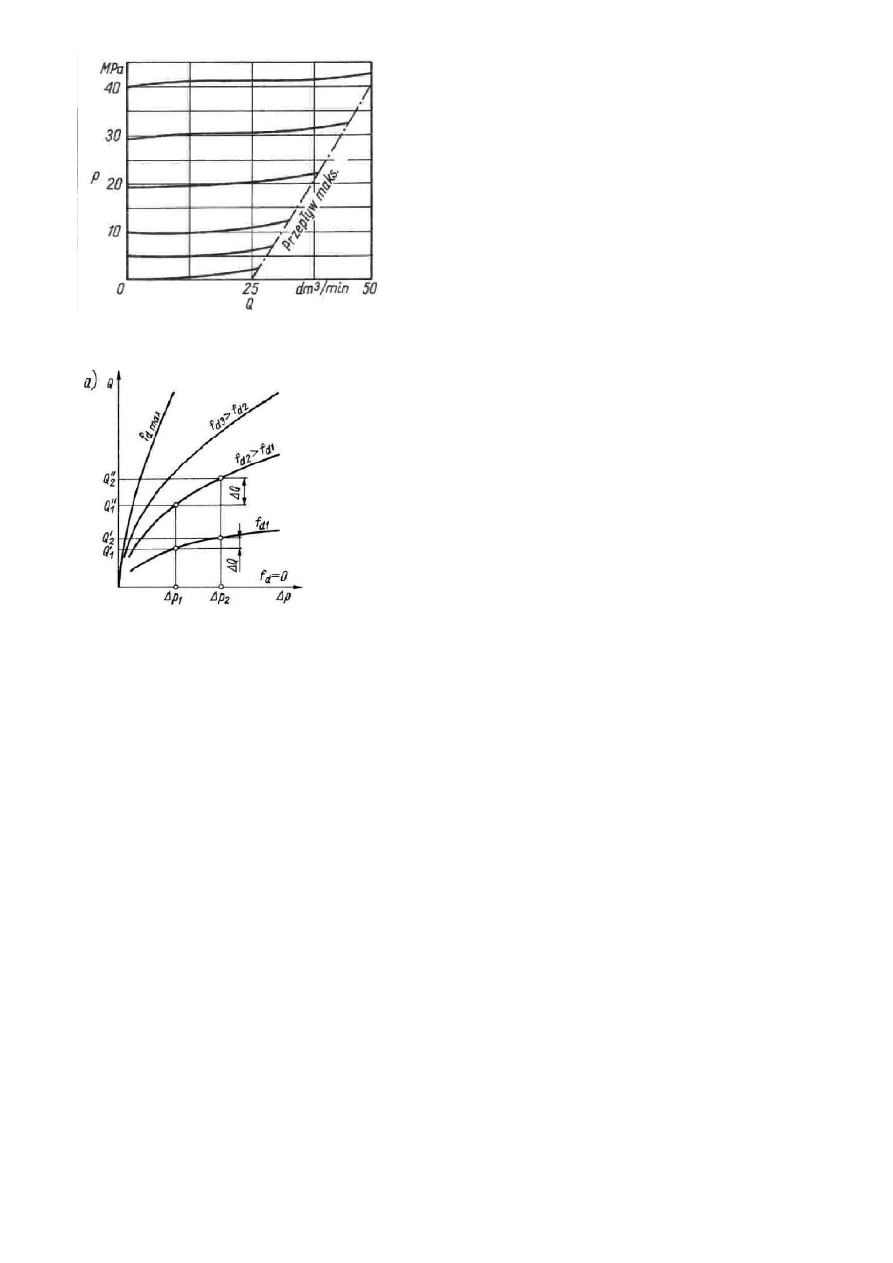
4. Charakterystyki mechaniczne i zasada częstotliwościowej zmiany prędkości obrotowej silnika
indukcyjnego
Częstotliwość wpływa na prędkość wirowania pola magnetycznego wytwarzanego w stojanie czyli prędkość
synchroniczną. Zmieniając częstotliwość możemy płynnie regulować prędkością obrotową od postoju po
prędkości ponad znamionowe.
5. b
6. Jakie parametry znamionowe silnika uwzględniamy podczas doboru silnika do układu napędowego.
Moc-byt duża powoduje prace silnika z niską sprawnością
Prędkość obrotowa, napięcie, częstotliwość, prąd(natężenie), moment
7. 𝑀
𝑛
= 9550
0,95∗10
1450
= 62,57𝑁𝑚
8. Zalety i wady napędu z silnikiem krokowym
Zalety:
Wady :
Moment trzymający(silnik pracuje z pełnym
momentem w stanie spoczynku)
Rezonanse mechaniczne przy niskich pr. Obr.
Precyzyjne pozycjonowanie
Szeroki zakres prędkości obrotowych bo pr.
obrotowa jest proporcjonalna do częstotliwości
impulsów we.
Trudność pracy z dużymi prędkościami(zjawisko
gubienia kroków)
Możliwość b. szybkiego rozbiegu
Moment obrotowy maleje wraz ze wzrostem
prędkości obrotowej
b. wysoka żywotność (brak szczotek)
Możliwość sterowania w pętli otwartej
9. Metody sterowanie silnikiem krokowym wymień metody sterowań i ich właściwości
Bipolarne: Zalety wykorzystanie całego momentu obrotowego bo całe dzwonienie pracuje
Wady: bardziej rozbudowany układ sterujący
Unipolarne: Zalety: prostszy układ sterujący
Wady: niepełne wykorzystanie momentu obrotowego ponieważ nie całe dzwonienie pracuje tylko połowa.
Falowe: zasilana jest tylko jedna faza w danym momencie pracy silnika. Gdy unipolarny falowy wykorzystane
tylko 25% uzwojenia, bipolarne falowe tylko 50% uzwojenia.
Pełno krokowe: zasilane dwie fazy jednocześnie pozycja wirnika przesunięta o pół kroku
Pół krokowe: co drugi krok jedna faza, w pozostałych dwie
Mikro krokowe: prądy w uzwojeniu zmieniają się płynnie rozbijając krok na wiele mniejszych
Sterowanie może być też parametrami zasilającymi czyli prądem, indukcyjnością, rezystancją.
10. Wyjaśnij termin BLCD
Silnik z komutacją elektroniczną
11. Wymień główne zalety silnika bez szczotkowego.
Duża sprawność, brak komutatora, liniowa charakterystyka mechaniczna, wysoki stosunek rozwijanego
momentu do gabarytów, bardzo mała inercja wirnika
12. Narysuj przykładowy schemat układu hydraulicznego
W przypadku tym co w pytaniu zamiast pompy wirowej ma być po prostu pompa.
13. Podaj przynajmniej trzy zalety i trzy wady napędów hydrostatycznych w porównaniu do napędów
elektrycznych.
Zalety:
-Znacznie większa wydajność z jednostki masy lub objętości; w porównaniu z silnikiem elektrycznym o tej
samej mocy i prędkości obrotowej silnik hydrauliczny jest o 14 razy lżejszy i o 26 razy mniejszy
-Mała bezwładność układu około 72 razy mniejsza w porównaniu z silnikiem elektrycznym
-Samo smarowność
Wady:
- Podatność na zanieczyszczenia
-Wycieki czynnika roboczego
-Niska sprawność
14. Wymień i opisz funkcje podstawowych elementów wchodzących w skład zasilacza hydraulicznego
Silnik- służy do napędzania pompy najczęściej elektryczny
Pompa- element roboczy wytwarza ciśnienie robocze w układzie
Zawór dławiący- reguluje ilość przepływającego płynu w przewodzie regulując jego prześwitem. Może być
regulowany lub nieregulowany(o stałym przepływie)
Zawór redukcyjny- ma za zadanie redukcje ciśnienia. Za zaworem często mniejsze ciśnienie niż przed zaworem,
najczęściej regulowane, przeciwdziała wahaniom ciśnienia
Zawór przelewowy-mają za zadanie niedopuszczenie do przeciążenia układu ciśnieniem kiedy ciśnienie
wzrośnie do wartości
Zbiornik – służy do magazynowania czynnika roboczego i najczęściej pełni funkcję chłodnicy płynu roboczego.
15. Jaką rolę w układzie hydraulicznym pełnią rozdzielacze hydrauliczne i jak są sterowane.
Służą do kierowania czynnikiem roboczym zależnie od swojego położenia i ustawienia kanałów wewnątrz.
Czyli służą do sterowania układem np. w położeniu 1 podają płyn na tłok a w położeniu drugim podają z
drugiej strony. Mogą być sterowane mechanicznie, elektrycznie, hydraulicznie lub pneumatycznie uraz
hybrydowo(np. połączenie sterowania hydraulicznego z pneumatycznym)
16. Zdefiniować, podać jednostki: wydajność teoretyczną pompy, wydajność jednostkową popy, wydajność
rzeczywistą pompy, sprawność ogólną(całkowitą) pompy, moc otrzymywaną z pompy(efektywną)

Wydajność teoretyczna pompy- ilość cieczy roboczej dostarczanej do przewodu tłoczącego w jednostce czasu.
Teoretycznie nie zależy od ciśnienia tylko od parametrów geometrycznych pompy
Wydajność rzeczywista popy- jest to wydajność rzeczywista pomniejszona o straty ciśnienia związane z
rozszczelnieniem układu.
Wydajność jednostkowa pompy- związana z koncepcją jej rozwiązania
Sprawność ogólna- spada przy zbyt niskim ciśnieniu roboczym. Jest wyrażona jako sprawność całkowita czyli
uwzględnia ona wszystkie straty jakie występują w pompie.
Moc otrzymywana (efektywna)- jest to moc jaką należy dostarczyć do pompy o wydajności Q
p
przy obciążeniu
(p
2
-p
1
)-różnica ciśnień w przewodzie ssawnym i tłocznym.
17. Przedstaw przykładowe zastosowanie i opisz sposób działania(elementy składowe) układu
przedstawionego na rysunku:
Rys1. Np. podnośnik hydrauliczny albo mała prasa. Elementy składowe:
1. Tłok
2. Rozdzielacz hydrauliczny
3. Zawór dławiący z zmiennym stopniu dławienia
4. Manometr
5. Pompa jedno-kierunkowa
6. Zawór przelewowy
Działanie: trzeba być idiotą żeby nie opisać tego od ręki. Szkoda czasu na pisanie
Rys2. Układ może działać jako przekładnia hydrauliczna ponieważ silnik i pompa mają regulowaną chłonność
1. Manometr
2. Zawór przelewowy
3. Pompa jedno-kierunkowa o zmiennej wydajności
4. Pompa dwustronnego działania
5. Zawór redukcyjny sprężynowy
6. Zawór przelewowy o nastawny
7. Silnik hydrauliczny o zmiennej chłonności dwustronnego działania
Układ z pompą 1 jedynie uzupełnia braki płynu roboczego w układzie z prawej strony. Układ drugi może
pracować w dwóch kierunkach. Niedobory lub nadmiary ciśnienia po jednej stronie są regulowane za pomocą
nastawnych zaworów przelewowych
Rys3. Układ może być wykorzystywany jako podnośnik lub praska o zmiennej prędkości elementu roboczego
1. Siłownik hydrauliczny
2. Zawór redukcyjny o zmiennej redukcji
3. Zawór przelewowy regulowany(nacisk sprężyny jest regulowany)
4. Rozdzielacz hydrauliczny
5. Pompa jednokierunkowa
Przy obecnym położeniu rozdzielacza 4 obie pompy pompują płyn z lewej strony tłoka powodując jego ruch z
maksymalną prędkością. Przesunięcie 4 w prawo powoduje, że przestrzeń pod tłokiem jest zasilany tylko przez
jedną pompę. Po wychyleniu w drugie skrajne położenie sytuacja jest analogiczna. Zawór przelewowy 3 dba o
to aby ciśnienie zasilające tłok nie przekroczyło wymaganej wartości
18. Zdefiniować i podać jednostki a)chłonność teoretyczną silnika b) sprawność rzeczywistą silnika
c)chłonność jednostkową silnika
a) Chłonność teoretyczna silnika- ilość cieczy roboczej pobieraną przewodu tłoczonego w jednostce
czasu.
b) Sprawność rzeczywista
c) Chłonność jednostkowa silnika
19. Narysuj charakterystyki przepływowe statyczne zaworu przelewowego.
20. Narysuj charakterystyki przepływowe statyczne zaworu dławiącego
21. Wymień znane Ci rodzaje prowadnic i porównaj ich właściwości.
Prowadnice ślizgowe i toczne. Ślizgowe- najprostsze łatwe do wykonania i tanie, największa sztywność. Do wad
zaliczamy: duży i nierównomierny opór ruchu, drgania cierne, krótka żywotność pod dużym obciążeniem,
trudność smarowania
Toczne- niewielka różnica pomiędzy tarciem statycznym a dynamicznym, nie występują efekty drgań ciernych,
dzięki niskiemu współczynnikowi tarcia nie wymagają dużych jednostek napędowych, wymagane minimalne
smarowanie, są droższe wymagają lepszej jakości materiałów i na elementy toczne i na bierznie.
22. Od jakich parametrów zależy żywotność prowadnicy.
W przypadku ślizgowych zależy to od obciążenia i smarowania
Żywotność tocznych zależy od obciążenia i jego zmienności, temperatury, powierzchni styku.
23. Oblicz możliwe do uzyskania przełożenia:
Ilość możliwych przełożeń to 6. Możliwe zazębienia:
1. z1+z2+z7+z8
2. z1+z2+z9+z10
3. z3+z4+z7+z8
4. z3+z4+z9+z10
5. z5+z6+z7+z8
6. z5+z6+z9+z10
24. Porównaj przekładnie śrubowe ślizgowe i toczne.
Ogólnie przekładnie śrubowe zapewniają możliwość uzyskania dużej dokładności i płynności ruchu przy
małych prędkościach. Zasadniczo różnią się one sprawnością. Sprawność ślizgowych w znacznej mierze zależy
od kąta tarcia i wzniosu linii śrubowej. Znacznie większą sprawność mają przekładnie toczne lub rolkowe
stosowane głównie w obrabiarkach sterowanych numerycznie ze względu na to, że nie występują drgania
spowodowane różnymi współczynnikami tarcia statycznego i kinematycznego. Toczne są droższe od
ślizgowych ale zapewniają mniejsze drgania oraz mniejsze zużycie(znacznie lepsze materiały na ich
wykonanie).
25.
Wyszukiwarka
Podobne podstrony:
Opracowanie Napędy i sterowanie maszyn (1)
Opracowanie pytań na egzamin z Systemów Sterowania Maszyn i Robotów u Salamandry
Napędy i sterowanie hudraulicznie - Pytania-zestaw 2, Pneumatyka - Hydraulika
Zadanie 1 warianty, AiR WIP, V semestr, NEMAR Napędy elektryczne maszyn i robotów
Napęd i sterowanie maszyn odpowiedzi
Napędy i sterowanie hydrauliczne i pneumatyczne
Napędy i sterowanie hydrauliczne i pneumatyczne materiały do ćwiczeń audytoryjnych
Pytania na drugi stopień MBM Sterowanie Maszyn i Urządzeń, Komp, Maszyny, Sterowanie maszyn i urządz
Elementy systemów sterowania maszyn zwiazane z bezpieczenstwem
elementy hydrauliczne symbole, Komp, Maszyny, Sterowanie maszyn i urządzeń
Opracowanie pytań Egzamin Maszyny Elektryczne 2011, Maszyny elektryczne
test50pytmaszyny, AiR WIP, V semestr, NEMAR Napędy elektryczne maszyn i robotów, nemar teori
Sprawozdanie katalogi, AGH, Semestr 5, Napędy i sterowanie hydrauliczne i pneumatyczne, NiS, pneumat
Napęd i sterowanie maszyn odpowiedzi
napęd hydrostatyczny podstawy, Komp, Maszyny, Sterowanie maszyn i urządzeń
więcej podobnych podstron