Obieg informacji w
mikrosystemie i jego
środowisku pracy
Łukasz Gaweł
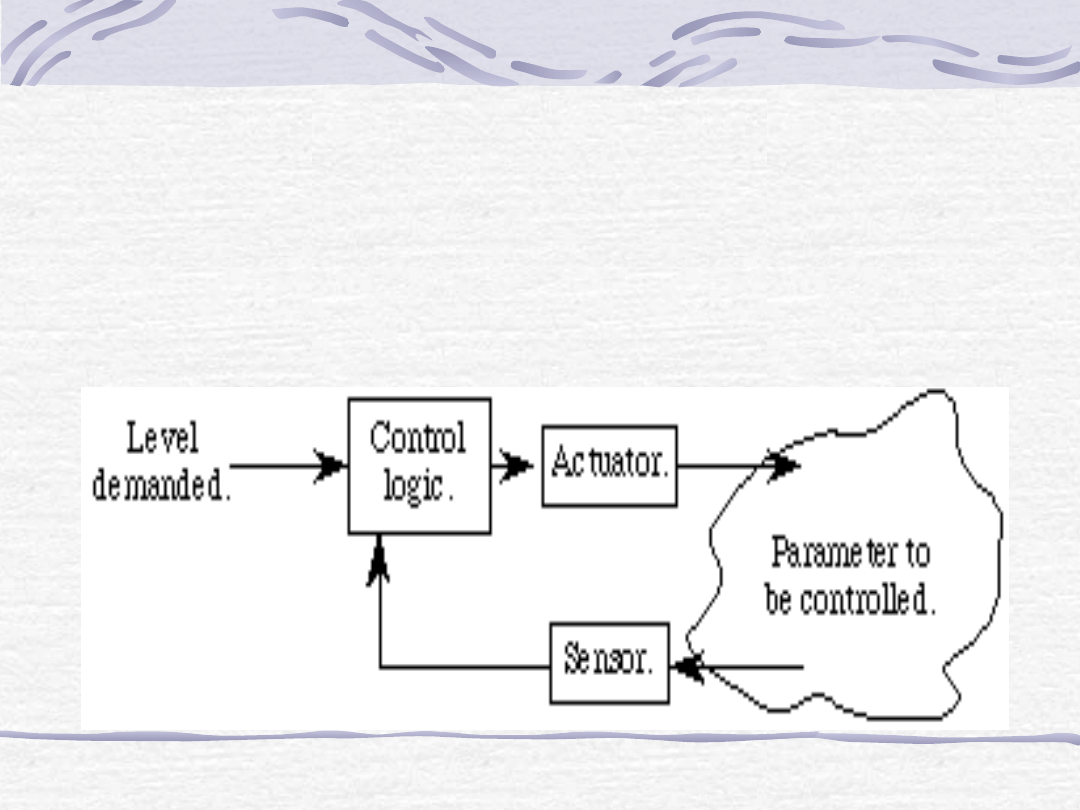
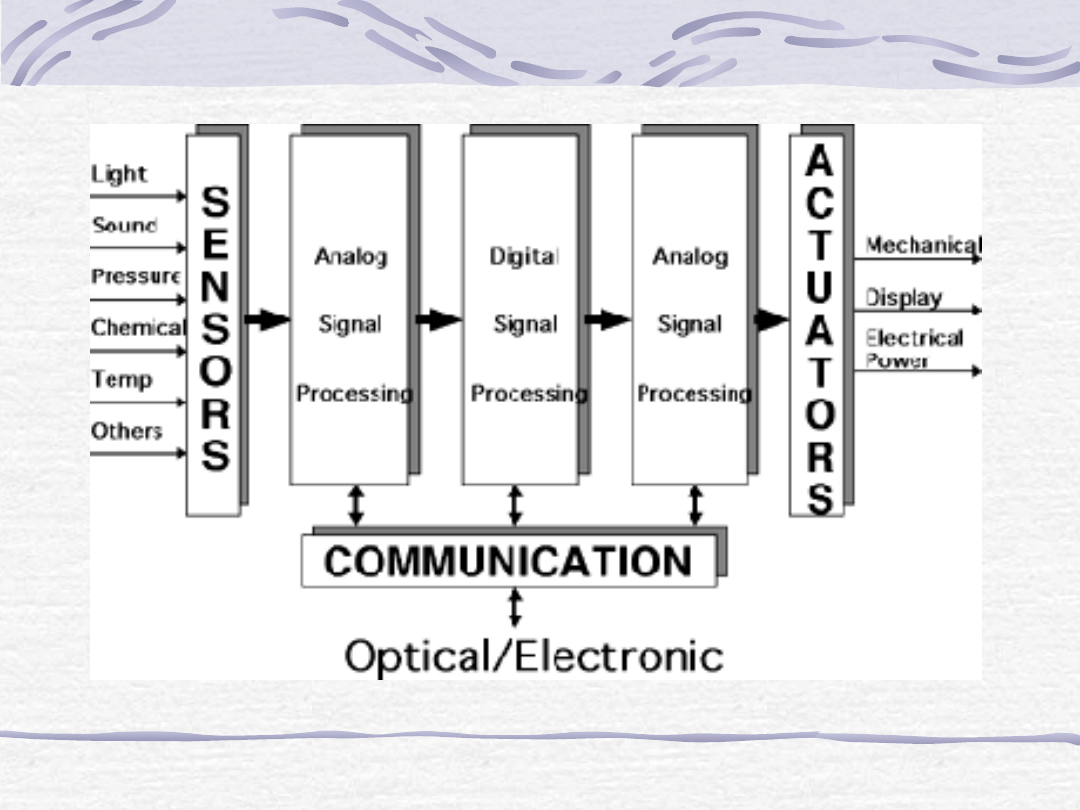
Mikrosystem może być rozpatrywany jako
system kontrolny. Mikrosensory wykrywają
zmiany parametrów, które mają być
kontrolowane; układ elektroniczny na
podstawie danych z sensorów steruje
aktuatorami, tak by utrzymać parametry w
zadanych granicach.
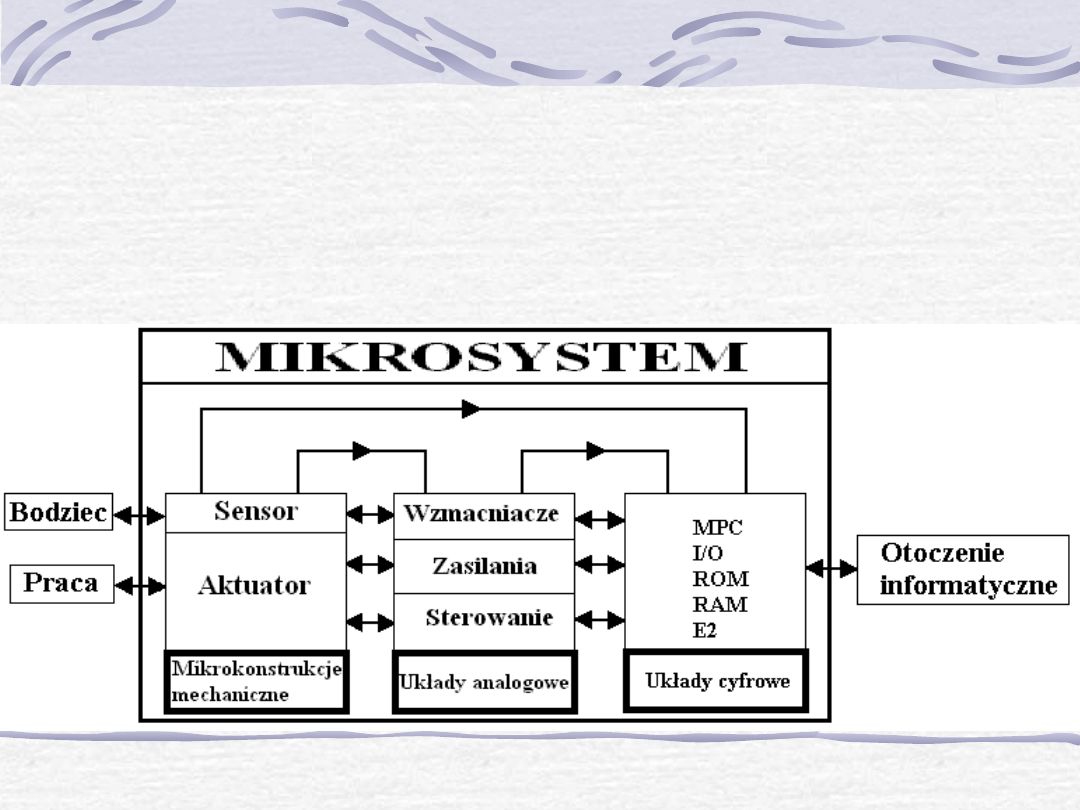
Mikrosystem można podzielić
na:
-
część mikromechaniczną,
- część analogową,
- część cyfrową.
W mikrosystemie podzespoły
mikromechaniczne oraz analogowe
i cyfrowe układy elektroniczne
współpracują ze sobą, między nimi
zaś występują sprzężenia
funkcjonalne i kontrolne.
Podzespoły mikromechaniczne
wykonują pracę/ruch; w tej części
mikrosystemu powstaje pierwszy
krok przetwarzania, czyli bodziec
– wielkość fizyczna lub chemiczna,
która zostaje przetworzona na
sygnał elektryczny (wielkość
mierzoną).
Mechaniczne (ciśnienie,
przyspieszenie, wibracje)
Elektryczne (napięcie
elektryczne, prąd)
Optyczne (długość fali,
intensywność promieniowania)
Chemiczne (skład mieszanin)
Odkształcenia mechaniczne
(membrany, belki); zmiana
wielkości elektrycznej
(rezystancja, pojemność)
Zmiana wielkości elektrycznych
Zmiana właściwości optycznych
(fotodioda)
Zmiana właściwości
chemicznych
Bodźce:
Przetwarzanie:
Układy mikroelektroniczne
wzmacniają i przetwarzają sygnały
elektryczne, sterują i kontrolują
podzespoły mikromechaniczne.
Sygnał pomiędzy sensorem a
układem analogowym ma postać
najczęściej napięcia elektrycznego,
prądu lub częstotliwości.
Układ analogowy ma za zadanie wstępną obróbkę sygnału:
wzmocnienie, filtrację szumów. Tak przygotowany sygnał musi być
przekazany do układu cyfrowego.
Pierwszym etapem w tym bloku jest przetwarzanie A/C. Sygnał w
tej postaci może być przetwarzany w zintegrowanym procesorze
lub
transmitowany do dalszej obróbki w otoczeniu informatycznym
W jednym i drugim przypadku sygnał może zostać poddany filtracji,
przekształcony przez transformatę Fouriera, możliwe są wstępne
obliczenia i korekcja cyfrowa, zapis do pamięci i transmisja danych.
Transmisja danych może odbywać się przy użyciu takich protokołów
jak: RS-232, LAN, X-10, EIB i innych.
Układ cyfrowy (procesor zintegrowany lub zewnętrzny)
steruje dostępnymi elementami ruchomymi, czyli aktuatorami.
Sygnał (rozkaz) o wykonaniu pracy (działania), zostaje
przetworzony na postać analogową w przetworniku C/A i
wzmocniony w układach analogowych. Konieczne jest
zapewnienie odpowiedniego zasilania do wykonywania pracy.
Może to być zasilanie elektryczne, pneumatyczne lub
hydrauliczne.
Aktuacja następuje przez np.. Otwarcie zaworu lub wzbudzenie
drgań. Powstałe w wyniku działania (pracy) zmiany są
rejestrowane przez sensory, przechodzą przez cały układ
przetwarzania i ponownie układ cyfrowy (najczęściej) decyduje
o ich zakończeniu.
Reasumując:
„Mikrosystem przypomina swą
budową żywy organizm. Czujniki są
odpowiednikami zmysłów, aktuatory
to organy ruchu, układy
mikroelektroniczne i
oprogramowanie odpowiadają
układowi nerwowemu.”
J.Dziuban
Document Outline
Wyszukiwarka
Podobne podstrony:
Społeczny obieg informacji
13 3 obieg informacji w WSBid 14597 ppt
W3 El obieg informacji
SILP OBIEG INFORMACJI W PROCESIE PLANOWANIA I REJESTRACJI POZYS…
obieg informacji w przedszkolu zasady kontaktow nauczycieli, organizacja-pracy
W3 - El. obieg informacji, STUDIA, III Semestr, Procesy Informacyjne w zarządzaniu prof Stanisław Wr
obieg informacji
Matulewski, Marek Obieg informacji w świetle Prawa upadłościowego i naprawczego
Społeczny obieg informacji
W3 El obieg informacji
więcej podobnych podstron