Układy ze sprzężeniem
zwrotnym
Koncepcję sprzężenia zwrotnego, w latach trzydziestych dwudziestego wieku,
opublikował H. S. Black i obecnie jest ono (sprzężenie zwrotne) powszechnie
stosowne w analogowych układach elektronicznych.
Wspólną a zarazem istotną cechą działania układów regulacji automatycznej
jest zastosowanie w nich specjalnego połączenia, zwanego sprzężeniem
zwrotnym.
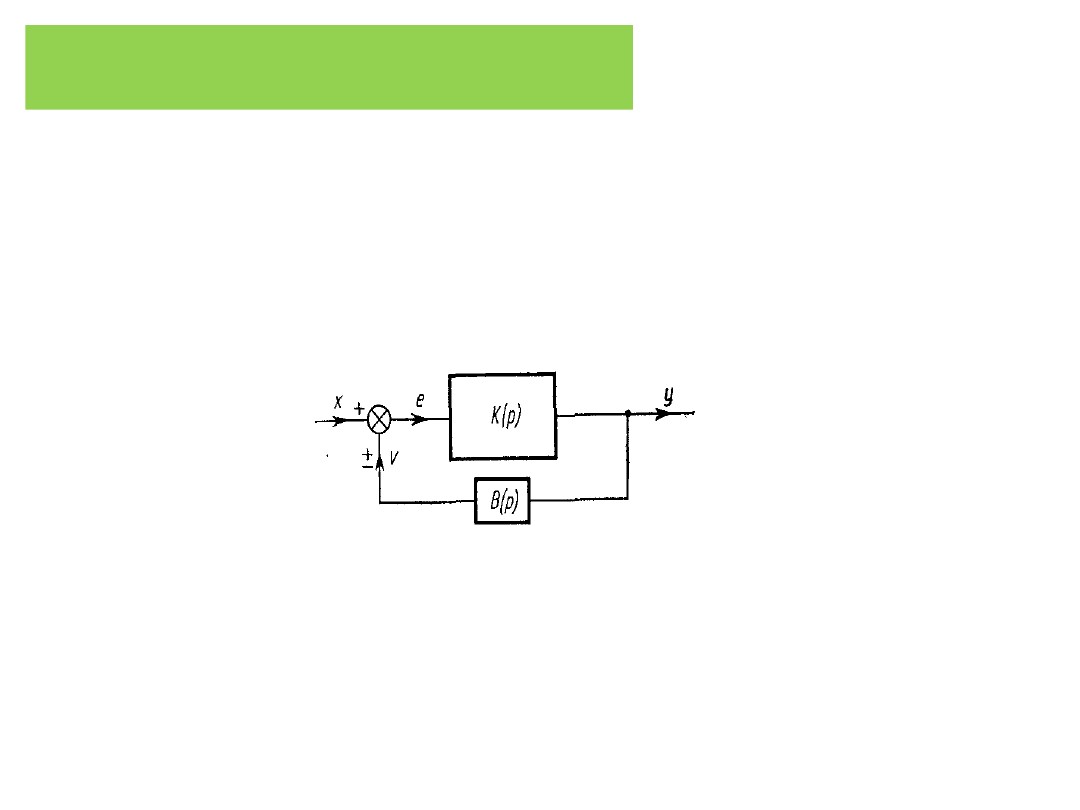
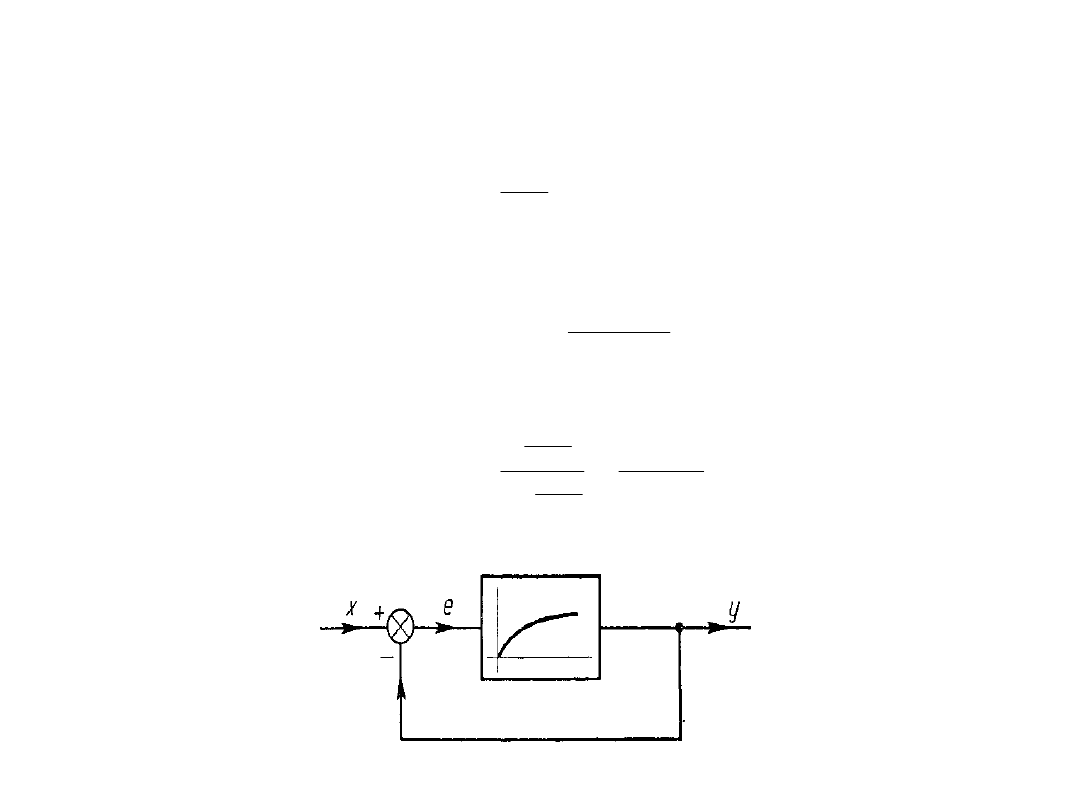
Najprostszy typ układu ze sprzężeniem zwrotnym
Istotą zastosowanego połączenia jest sygnał y, który występuje na wyjściu
układu i jest wprowadzany z powrotem poprzez element B(p) na jego wejście.
Takie rozwiązanie nazywa się sprzężeniem zwrotnym, a układ, w którym go
zastosowano układem ze sprzężeniem zwrotnym.
Sygnał v wprowadzić z powrotem do układu w taki sposób, aby się dodawał lub
odejmował od sygnału x. W przypadku dodawania mamy mówimy o sprzężeniu
zwrotnym dodatnim, a w przypadku odejmowania o sprzężeniu zwrotnym
ujemnym.
Termin sprzężenie zwrotne jest związany z teorią transmisji sygnałów i oznacza,
że napięcie wyjściowe dowolnego liniowego układu analogowego, np. wzmacniacza
akustycznego, w odpowiedniej proporcji oraz w miarę potrzeby odpowiednio
odfiltrowane ponownie jest kierowane do wejścia wzmacniacza i dodaje się lub
odejmuje się od sygnału sterującego
Możemy obliczyć jaka jest zależność pomiędzy sygnałami x, e, y w tych układach.
= K(p), = B(p),
a dodatkowe równanie dla węzła sumującego ma postać
E(p) = X(p) ± V(p);
stąd
=
)
(
)
(
p
E
p
Y
)
(
)
(
p
Y
p
V
)
(
)
(
p
X
p
Y
)
(
)
(
1
)
(
p
B
p
K
p
K
Stosunek Y(p)/X(p) określa funkcję przejścia elementu ze sprzężeniem
zwrotnym. Jeśli oznaczymy ją jako K
z
(p) to otrzymamy równanie:
K
z
(p) = ,
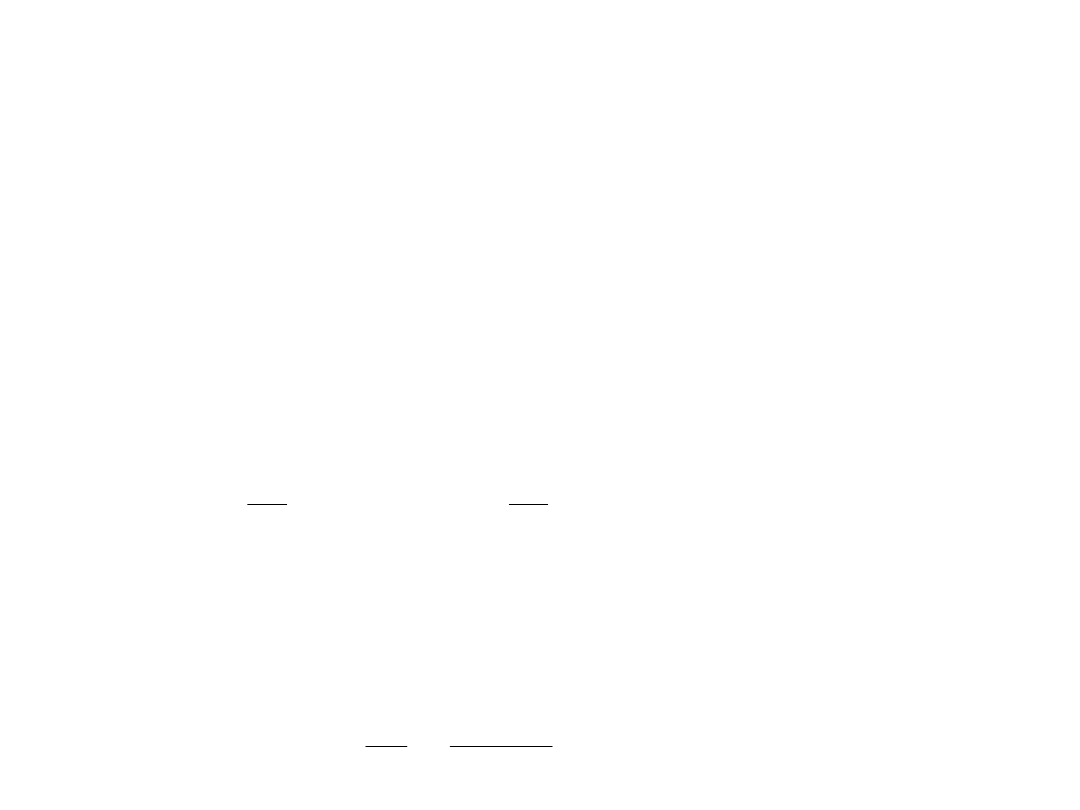
W przypadku sprzężenia zwrotnego ujemnego we wzorze obowiązuje znak + ;
mamy wówczas:
K
z
(p) = ,
Można więc powiedzieć, że element o funkcji przejścia K w którym
zastosowano sprzężenie zwrotne ujemne jest równoważny elementowi o
funkcji przejścia K
z
= K/(1+KB)
)
(
)
(
1
)
(
p
B
p
K
p
K
)
(
)
(
1
)
(
p
B
p
K
p
K
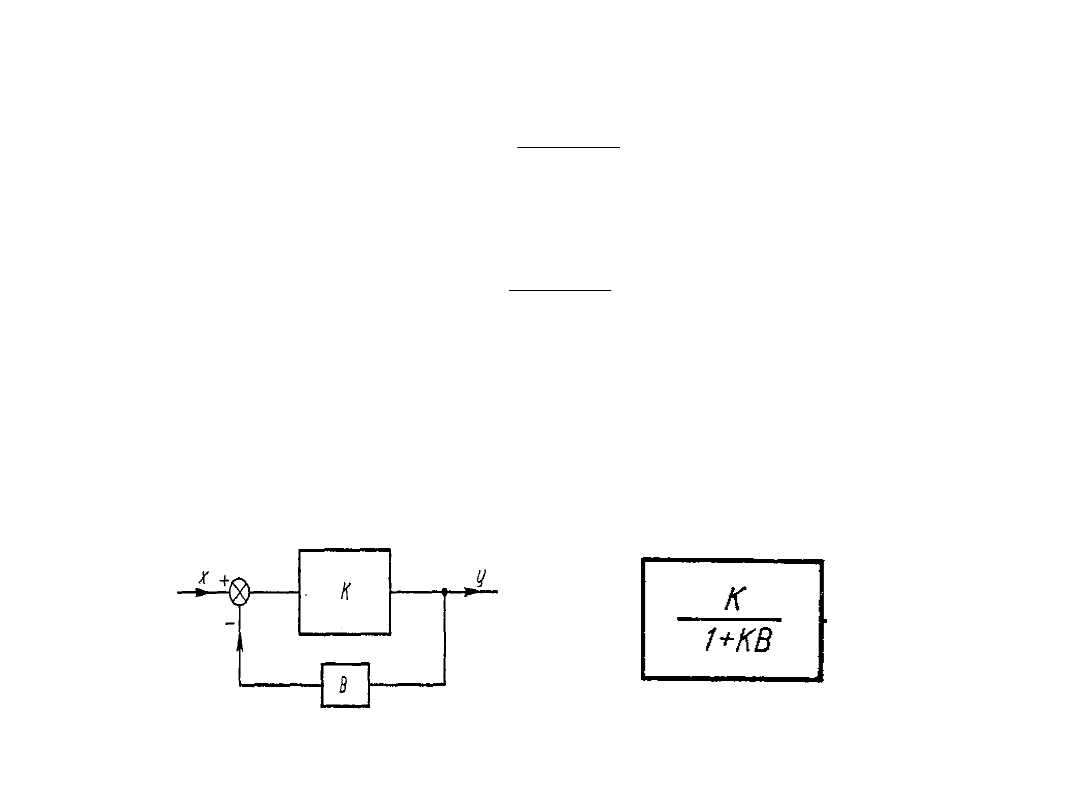
W przypadkach sprzężenia zwrotnego dodatniego we wzorze
obowiązuje znak - .
K
z
(p) = ,
Element o funkcji przejścia K, w którym zastosowano sprzężenie
zwrotne dodatnie równoważy element o funkcji przejścia
K
z
= K/(1-KB)
)
(
)
(
1
)
(
p
B
p
K
p
K
Przykład
Niech dany będzie wzmacniacz o funkcji przejścia
K(p) = k
Jeżeli zastosujemy w nim sprzężenie zwrotne ujemne zgodnie ze wzorem
K
z
(p) =
oraz uwzględniając to, że B(p) = 1, otrzymamy (rysunek)
K
z1
= = ,
pT
k
1
)
(
)
(
1
)
(
p
B
p
K
p
K
pT
k
pT
k
1
1
1
1
1
pT
k
k
)
1
(
1
k
k
1
k
T
k
T
Wzmacniacz inercyjny z ujemnym sprzężeniem zwrotnym
k
z1
(t) =
(
1-e
-
t/
),
Jeżeli k l, to wzór k
z1
można uprościć przyjmując k+1
k. otrzymamy
wówczas
k
z1
(t) = (1-e
-t/
),
=
=
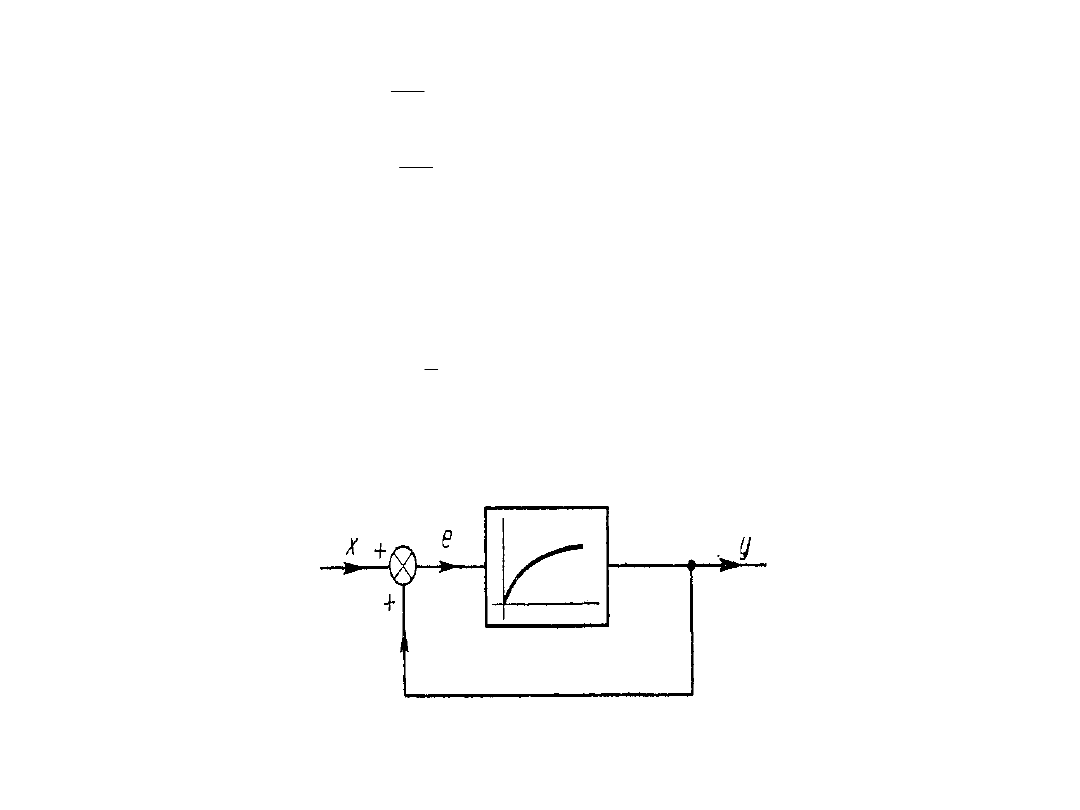
Jeżeli w rozpatrywanym wzmacniaczu zastosujemy dodatnie sprzężenie zwrotne
według schematu z rysunku
Wzmacniacz inercyjny z dodatnim sprzężeniem
zwrotnym

to na podstawie wzoru
K
z
(p) = ,
otrzymamy
K
z2
(p)
= =
k
z2
(t) = (1-e
-t/
),
=
Jeżeli k l, to wzór k
z2
k
z2
(t) = -(1-e
-t/
),
= -
Znalezione funkcje przejścia pozwalają nam obliczyć przebiegi sygnałów wyjściowych
wywołanych załączeniem dowolnych sygnałów wejściowych x(t).
Szczegółowe obliczenia przeprowadzimy dla przypadku x(t)=x
o
1(t), x
o
= const.
)
(
)
(
1
)
(
p
B
p
K
p
K
pT
k
pT
k
1
1
1
1
1
pT
k
k
)
1
(
1
k
k
k
T
1
k
T

I tak, jeżeli sprzężenie zwrotne jest ujemne, to przy założeniu k > l mamy
na podstawie wzoru
y(t) = x
o
(1-e
-t/
),
na podstawie wzoru e(t) = x(t) –
y(t) mamy
e(t) = x
o
e
-t/
Jeżeli sprzężenie zwrotne jest dodatnie, to przy analogicznym założeniu k > l
mamy na podstawie wzoru
y(t) = -x
o
(1-e
-t/
),
.
oraz, uwzględniając e(t) = x(t)
+ y(t),
e(t) = x
o
e
-t/
,
Przebiegi sygnałów x(t), e(t) i y(t) dla przypadków ujemnego i dodatniego
sprzężenia zwrotnego pokazane są odpowiednio na rys. A i B.
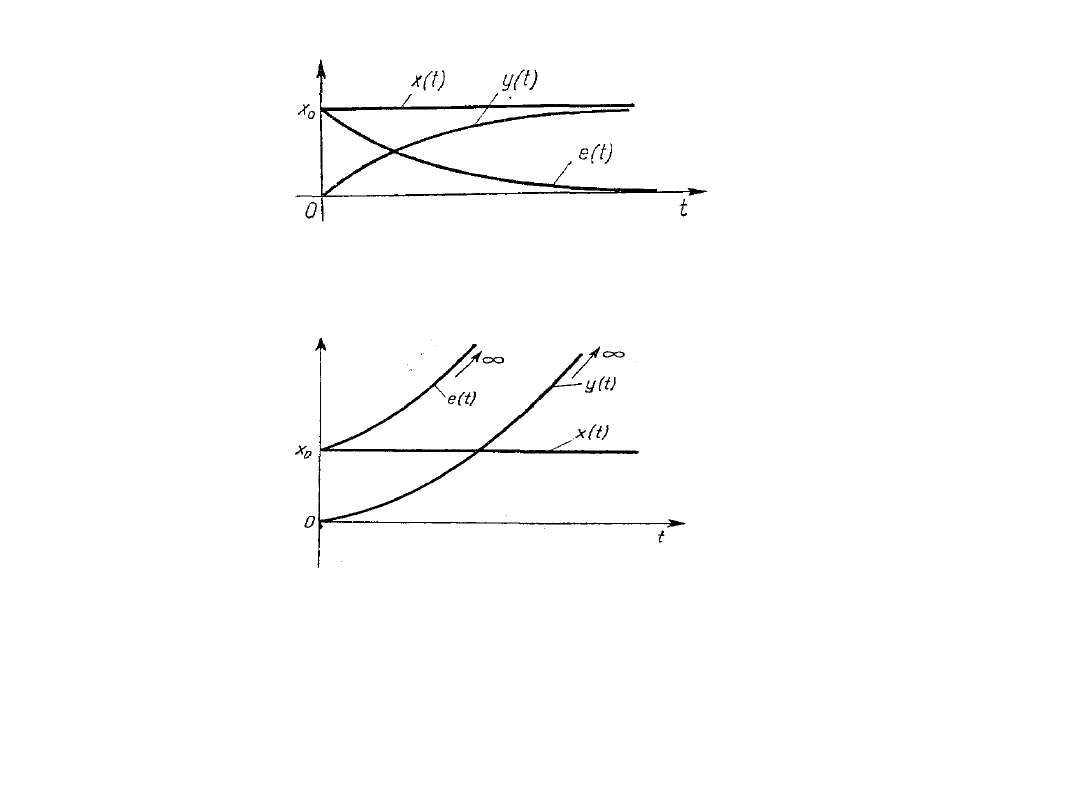
A. Przebiegi sygnałów x(t), e(t), y(t)w przypadku ujemnego sprzężenia zwrotnego
B. Przebiegi sygnałów x(t),e(t),y(t)w przypadku dodatniego sprzężenia zwrotnego

Jak widać, zastosowanie ujemnego sprzężenia zwrotnego
spowodowało to, że odpowiedź wzmacniacza y(t) na sygnał
jednostkowy x
o
dąży do tej samej wartości x
o
, niezależnie od zmian,
jakim może ulegać wartość wzmocnienia k na skutek wahań
zasilania, starzenia elementów itp., byle tylko zachowany był
warunek k
1.
Tę własność stabilizacji można uważać za pewną cechę prostych
układów z ujemnym sprzężeniem zwrotnym.
Zastosowanie
natomiast
dodatniego
sprzężenia
zwrotnego
spowodowało to, że odpowiedź y(t) i sygnał e(t) rosną teoretycznie
nieograniczenie. W takim przypadku mówimy o wzbudzeniu się
układu.
Document Outline
Wyszukiwarka
Podobne podstrony:
Badanie wzmacniacza ze sprzężeniem zwrotnym (Naprawiony)
Regulacja-konspekt, Regulacja - jest to sterowanie w układzie zamkniętym, a więc w układzie ze sprzę
Żołnierka, teoria systemów, układ ze sprzężeniem zwrotnym
PROJEKT Z UKŁADÓW ELEKTRONICZNYCH 3 Analiza sprzężenia zwrotnego Szerokopasmowy wzmacniacz dwutranzy
PROJEKT Z UKŁADÓW ELEKTRONICZNYCH 2 Analiza zmiennoprądowa Szerokopasmowy wzmacniacz dwutranzystorow
więcej podobnych podstron