27 kwietnia 2021
J.Lisowski, PA_10_Ukł złożone
1
Regulacji
Regulacji
kaskadowej
kaskadowej
Zamknięto-otwarte
Zamknięto-otwarte
Wielowymiarowe
Wielowymiarowe
XI. ZŁOŻONE UKŁADY
XI. ZŁOŻONE UKŁADY
AUTOMATYKI
AUTOMATYKI
prof. Józef Lisowski
1
PODSTAWY AUTOMATYKI_XI_Złożone układy
automatyki

Układy regulacji
Układy regulacji
kaskadowej
kaskadowej
Regulacja kaskadowa
Regulacja kaskadowa
umożliwia poprawę jakości
regulacji poprzez:
- linearyzację nieliniowej charakterystyki statycznej
obiektu,
- kompensację dynamiki części obiektu regulacji,
- poprawienie kompensacji zakłóceń.
Warunkiem realizacji układu regulacji kaskadowej jest
zastosowanie dodatkowego przetwornika pomiarowego
wielkości pomocniczej obiektu regulacji.
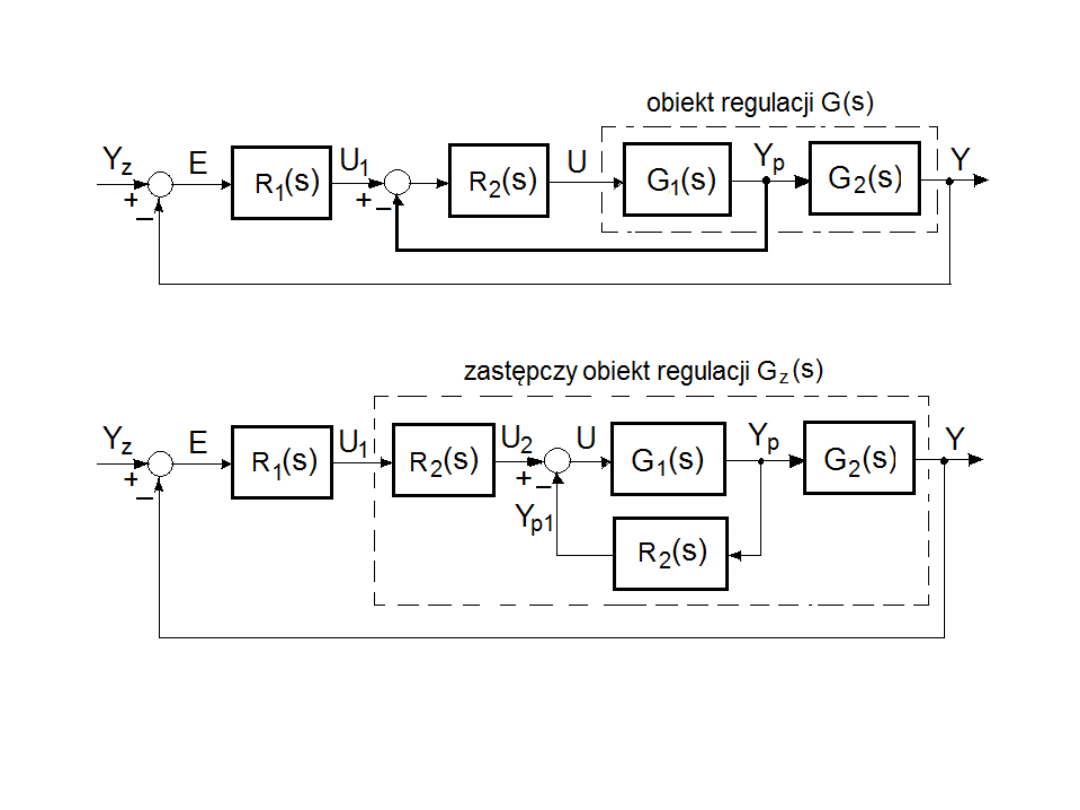
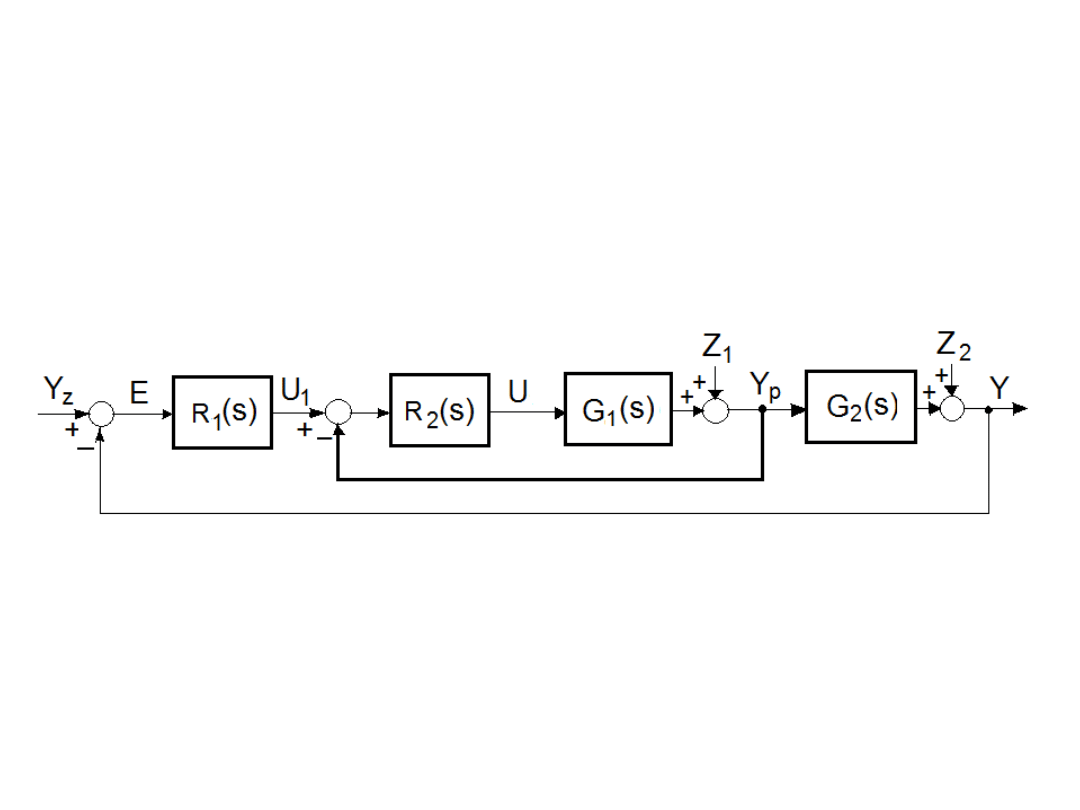
Układ kaskadowy realizuje się poprzez pomiar wielkości
pomocniczej Y
p
i rozdzielenie obiektu na dwie części –
szybką z nieliniową charakterystyką statyczną i
inercyjną oraz wprowadzenie dwóch regulatorów -
głównego R
1
i pomocniczego R
2
.
1
G
2
G
PODSTAWY AUTOMATYKI_XI_Złożone układy
automatyki
prof. Józef Lisowski
2
PODSTAWY AUTOMATYKI_XI_Złożone układy
automatyki
prof. Józef Lisowski
3
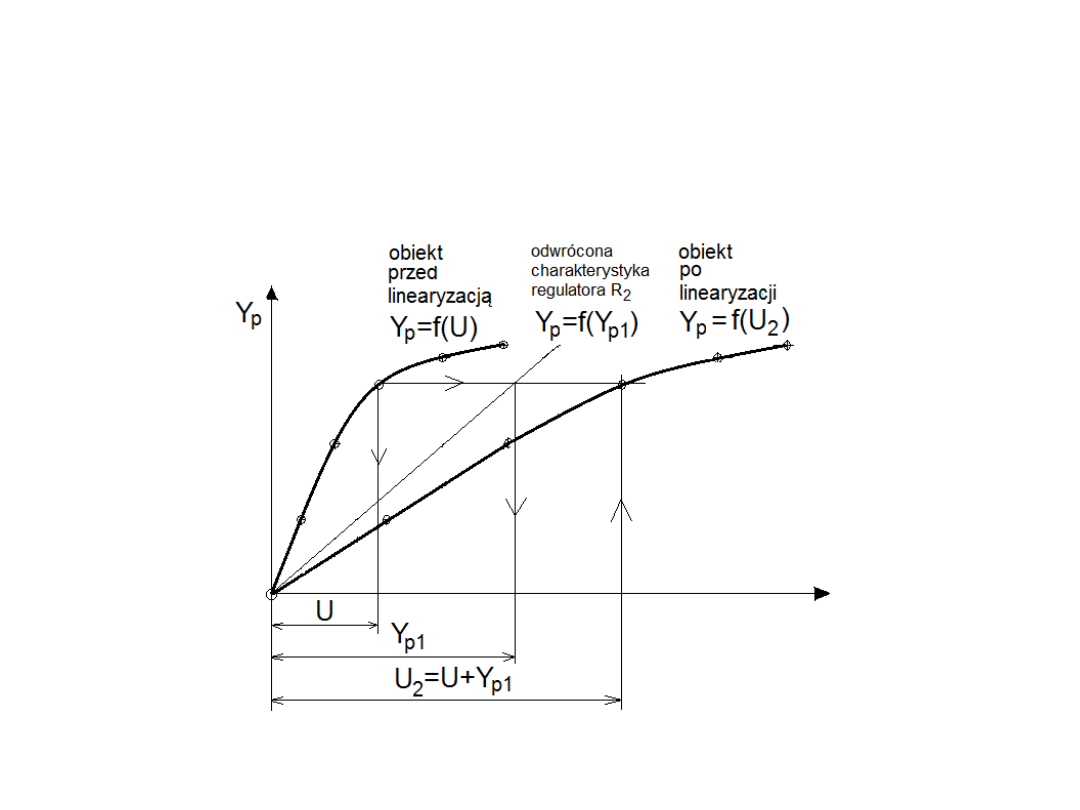
Jeśli część obiektu wykazuje nieliniową charakterystykę
statyczną, to dla regulatora R
2
typu P o współczynniku
wzmocnienia k
p
otrzymuje się charakterystykę wypadkową o
bardziej liniowym przebiegu.
Linearyzacja
Linearyzacja
nieliniowej charakterystyki statycznej
nieliniowej charakterystyki statycznej
obiektu
obiektu
1
G
PODSTAWY AUTOMATYKI_XI_Złożone układy
automatyki
prof. Józef Lisowski
4
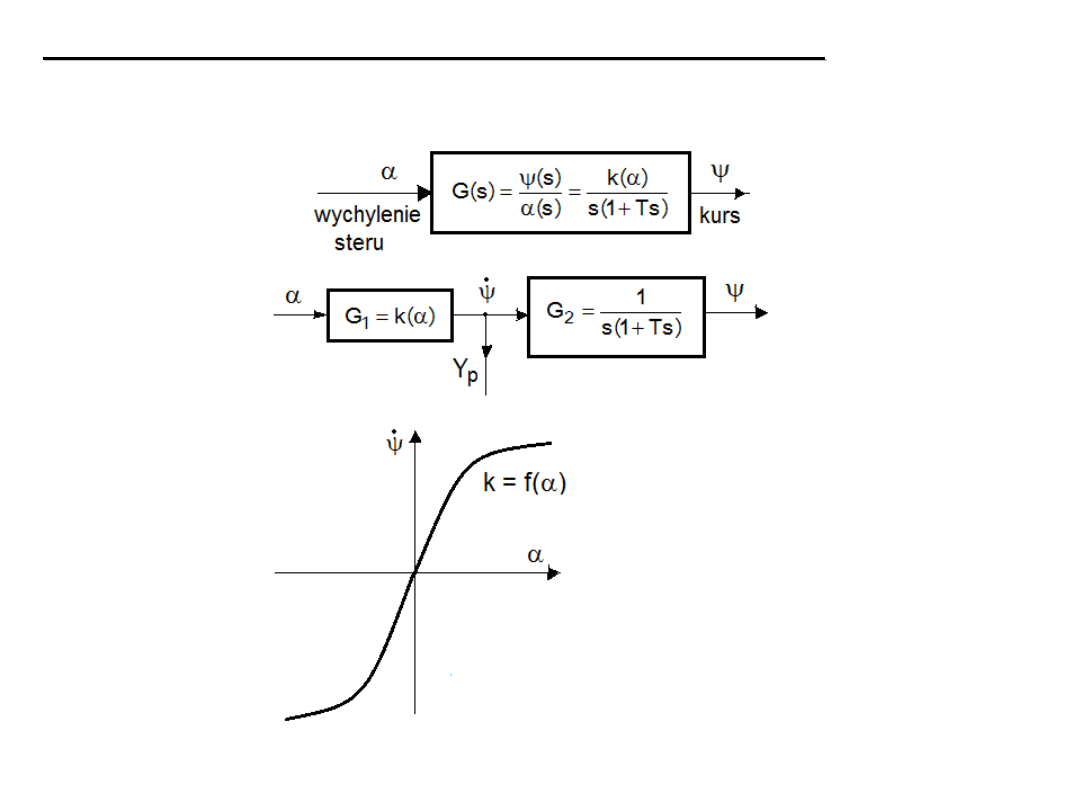
Przykład
Przykład
obiektu regulacji kaskadowej
obiektu regulacji kaskadowej - statek jako
obiekt regulacji kursu
PODSTAWY AUTOMATYKI_XI_Złożone układy
automatyki
prof. Józef Lisowski
5
Regulator R
1
współdziała z zastępczym obiektem o
transmitancji:
s
R
s
G
1
s
R
s
G
s
G
s
U
s
Y
s
G
2
1
2
1
2
1
z
Kompensacja dynamiki części obiektu
Kompensacja dynamiki części obiektu
regulacji
regulacji
s
G
1
s
R
s
G
1
1
s
G
s
U
s
Y
s
G
2
2
1
2
z
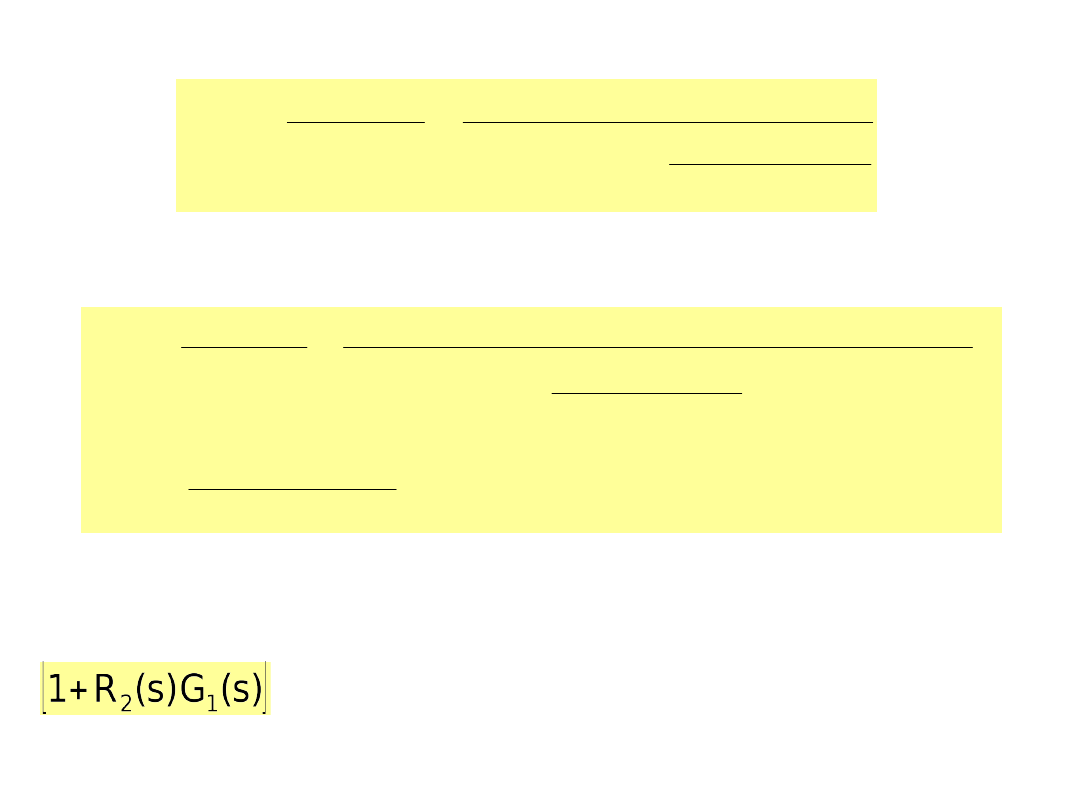
W paśmie częstotliwości, w którym iloczyn
przybiera duże wartości, zostaną skompensowane
własności dynamiczne części obiektu o transmitancji
G
1
(s):
j
R
j
G
2
1
PODSTAWY AUTOMATYKI_XI_Złożone układy
automatyki
prof. Józef Lisowski
6
Zakłócenie Z
1
wpływa na wielkość pomocniczą Y
p
po
najkrótszej drodze, a Z
2
dopiero po przejściu całego
obiegu regulacyjnego.
Kompensacja
Kompensacja
zakłóceń
zakłóceń
PODSTAWY AUTOMATYKI_XI_Złożone układy
automatyki
prof. Józef Lisowski
7
Wskaźnik regulacji w odniesieniu do zakłócenia Z
2
:
s
G
s
R
1
s
G
s
R
s
G
s
R
1
1
s
G
1
1
s
q
1
2
1
2
2
1
2
o
2
Wskaźnik regulacji w odniesieniu do zakłócenia Z
1
:
Zakłócenie Z
1
wpływające na obiekt przed miejscem
pomiaru wielkości pomocniczej Y
p
jest kompensowane
silniej, w stosunku
krotnym, niż zakłócenie Z
2
.
PODSTAWY AUTOMATYKI_XI_Złożone układy
automatyki
prof. Józef Lisowski
8
]
s
G
s
R
1
[
s
q
s
G
s
R
1
s
G
s
R
1
s
G
s
R
s
G
s
R
1
1
s
G
1
1
s
q
1
2
2
1
2
1
2
1
2
2
1
1
o
1

Efekt ten ma istotne znaczenie wówczas, gdy część
obiektu
zawiera opóźnienie i nie pozwala na
zbudowanie układu jednoobwodowego o dużej wartości
modułu transmitancji w szerokim paśmie częstotliwości.
Jeśli przy tym część obiektu opóźnienia nie
zawiera, to można zrealizować iloczyn o
dużych wartościach, a tym samym uzyskać dobrą
skuteczność regulacji w stosunku do zakłócenia Z
1
.
Warto zwrócić uwagę, że układ kaskadowy nie daje tak
dużych korzyści przy zakłóceniu Z
2
, albo przy nadążaniu
za Y
z
, oraz w tych przypadkach, gdy obiekt ma
opóźnienie w części .
Opóźnienie takie nie pozwoli bowiem na osiągnięcie
dużych wartości iloczynu .
s
G
2
s
T
o
e
s
G
1
s
G
s
R
1
2
s
G
s
R
1
2
s
G
1
PODSTAWY AUTOMATYKI_XI_Złożone układy
automatyki
prof. Józef Lisowski
9
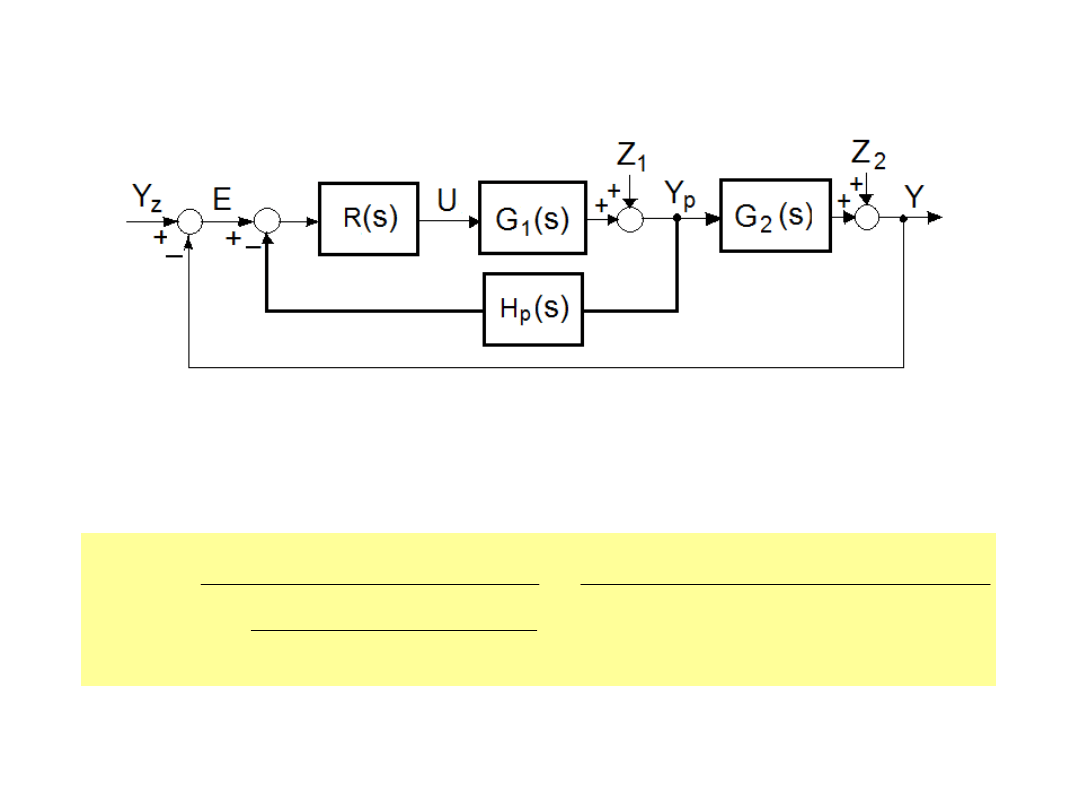
Układ kaskadowy z członem
Układ kaskadowy z członem
sprzężeniowym
sprzężeniowym
H
H
p
p
(s)
(s)
Wskaźnik regulacji w odniesieniu do zakłócenia Z
2
:
]
s
H
s
G
[
s
G
s
R
1
s
G
s
H
s
R
1
s
G
s
H
s
R
1
s
G
s
G
s
R
1
1
s
q
p
2
1
p
1
p
2
1
2
PODSTAWY AUTOMATYKI_XI_Złożone układy
automatyki
prof. Józef Lisowski
10
s
G
s
H
s
R
1
s
q
]
s
H
s
G
[
s
G
s
R
1
1
s
G
s
H
s
R
1
s
G
s
G
s
R
1
s
G
s
H
s
R
1
1
s
q
1
p
2
p
2
1
1
p
2
1
2
p
1
Zastosowanie członu sprzężeniowego o transmitancji H
p
dodatkowo poprawia kompensację wpływu zakłóceń Z
1
.
Wskaźnik wyznaczony dla zakłóceń Z
2
jest identyczny ze
wskaźnikiem, charakteryzującym uchyb nadążania.
Najczęściej stosuje się człon sprzężeniowy H
p
(s)
różniczkujący rzeczywisty, odpowiadający w układzie
kaskadowym regulatorowi R(s) o działaniu PI
zapewniającym zerowy uchyb ustalony:
Wskaźnik regulacji w odniesieniu do zakłócenia Z
1
:
Ts
1
Ts
s
H
p
PODSTAWY AUTOMATYKI_XI_Złożone układy
automatyki
prof. Józef Lisowski
11
Układy zamknięto-otwarte
Układy zamknięto-otwarte
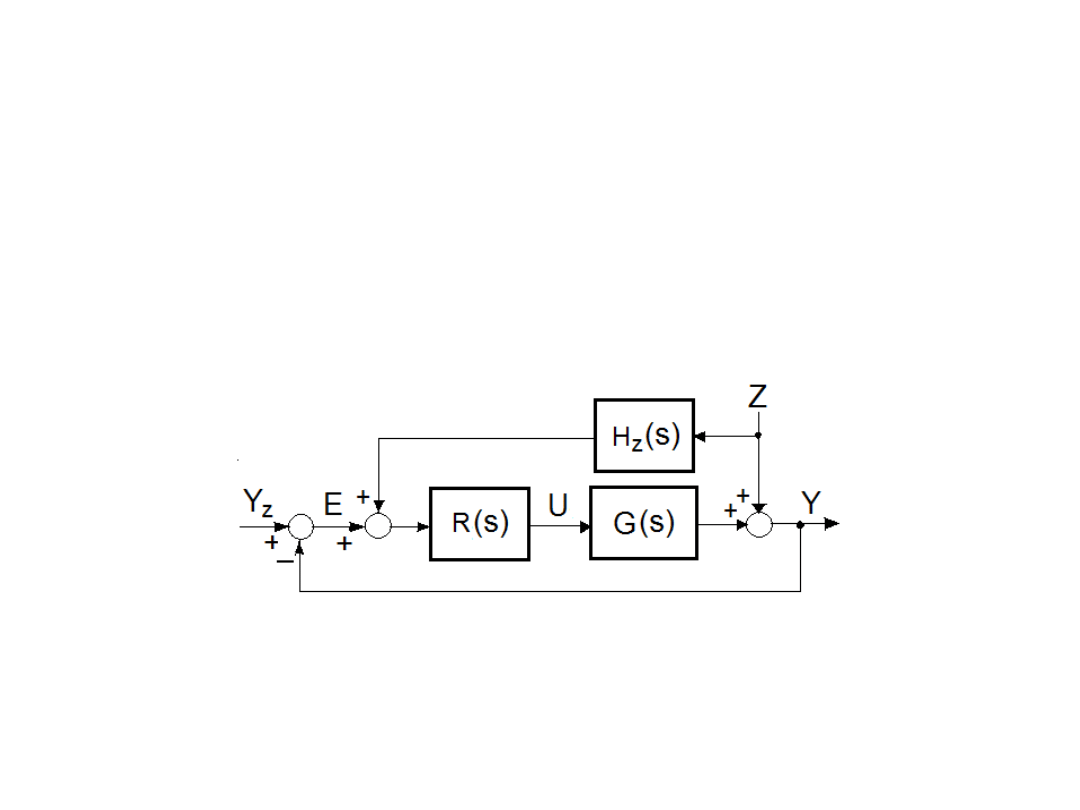
Wprowadzenie zakłócenia Z na wejście regulatora
poprzez człon sprzężeniowy H
z
(s) w układzie z ujemnym
sprzężeniem zwrotnym od wielkości regulowanej Y tworzy
zamknięto-otwarty układ regulacji.
zamknięto-otwarty układ regulacji.
PODSTAWY AUTOMATYKI_XI_Złożone układy
automatyki
prof. Józef Lisowski
12
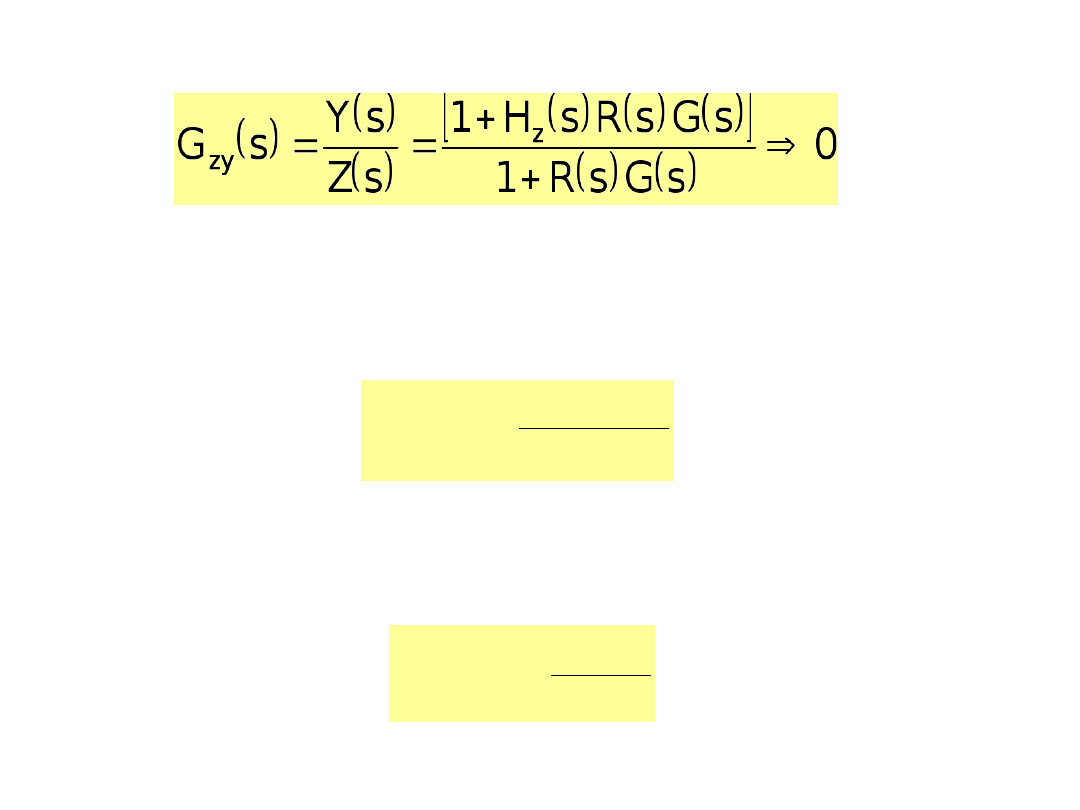
Aby skompensowaćwpływ zakłóceń Z na wielkość
regulowaną Y transmitancja członu sprzężeniowego H
z
(s)
powinna wynosić:
s
G
s
R
1
s
H
z
Wpływ zakłóceń opisuje transmitancja zakłóceniowa:
Na przykład dla regulatora PI i obiektu inercyjnego
pierwszego rzędu człon sprzężeniowy ma transmitancję:
Ts
1
Ts
s
H
z
s
G
PODSTAWY AUTOMATYKI_XI_Złożone układy
automatyki
prof. Józef Lisowski
13
Wielowymiarowe układy
Wielowymiarowe układy
regulacji
regulacji
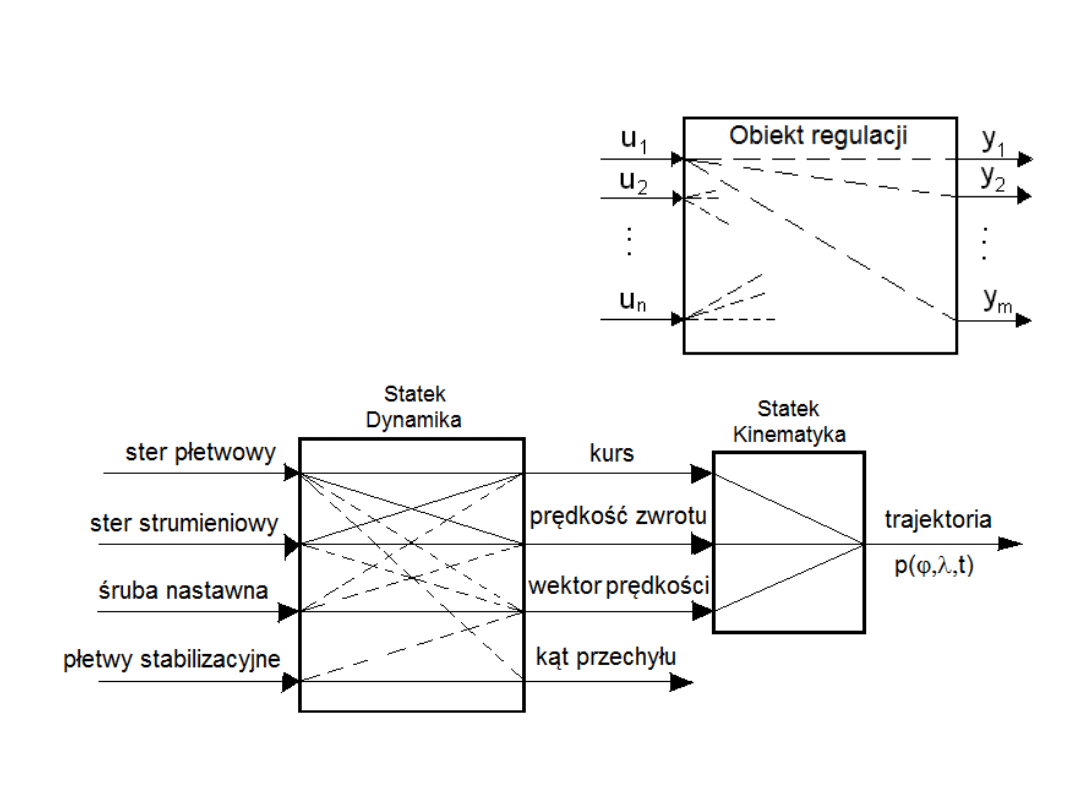
Wielowymiarowy obiekt
regulacji ma wiele wielkości
sterujących u(t) i
regulowanych y(t).
Istnieją w nim sprzężenia
skrośne - jedna wielkość
sterująca wpływa więcej niż
na jedną wielkość regulowaną.
PODSTAWY AUTOMATYKI_XI_Złożone układy
automatyki
prof. Józef Lisowski
14
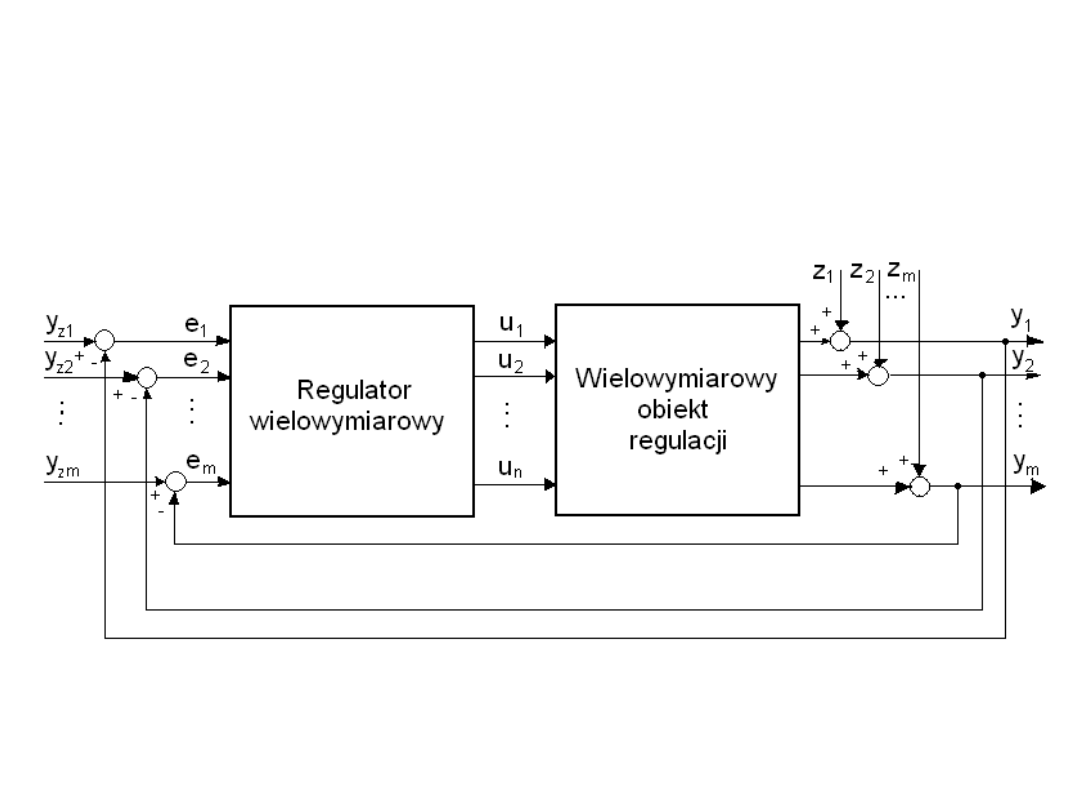
Wówczas do realizacji procesu regulacji automatycznej
należy zastosować również regulator wielowymiarowy.
Taki układ nazywa się wielowymiarowym układem
wielowymiarowym układem
regulacji
regulacji
.
PODSTAWY AUTOMATYKI_XI_Złożone układy
automatyki
prof. Józef Lisowski
15
Dla obiektu liniowego, dla którego obowiązuje zasada
superpozycji, związki między poszczególnymi wyjściami i
wejściami można wyrazić odpowiednimi
transmitancjami:
Wielowymiarowy obiekt regulacji
Wielowymiarowy obiekt regulacji
s
U
s
G
...
s
U
s
G
s
U
s
G
s
Y
....
..........
..........
..........
..........
..........
..........
..........
..........
s
U
s
G
...
s
U
s
G
s
U
s
G
s
Y
s
U
s
G
...
s
U
s
G
s
U
s
G
s
Y
m
mn
2
2
m
1
1
m
m
n
n
2
2
22
1
21
2
n
n
1
2
12
1
11
1
Przechodząc do zapisu związków w postaci macierzowo-
wektorowej otrzymuje się:
s
U
.........
s
U
s
U
s
G
.
..........
s
G
)
s
(
G
.
..........
.
..........
.
..........
.
..........
s
G
.
..........
s
G
s
G
s
G
.
..........
s
G
s
G
s
Y
..........
s
Y
s
Y
n
2
1
mn
2
m
1
m
n
2
22
21
n
1
12
11
m
2
1
PODSTAWY AUTOMATYKI_XI_Złożone układy
automatyki
prof. Józef Lisowski
16

W
zwartej
postaci
macierzowo-
wektorowej:
Y(s) = G(s) U(s)
Macierz transmitancji
Macierz transmitancji
G
G
(s)
(s)
ma m wierszy i n kolumn.
Jeżeli liczba wejść obiektu wielowymiarowego jest równa
liczbie jego wyjść, czyli n = m, to elementy znajdujące
się na głównej przekątnej macierzy G(s) określają
związki poszczególnych wyjść z wejściami o tych samych
wskaźnikach.
Elementy leżące poza główną przekątną o różnych
wskaźnikach n i m odpowiadają sprzężeniom skrośnym
występującym w obiekcie.
PODSTAWY AUTOMATYKI_XI_Złożone układy
automatyki
prof. Józef Lisowski
17
s
R
..........
s
R
s
R
..........
..........
..........
..........
s
R
..........
s
R
s
R
s
R
..........
s
R
s
R
s
R
s
R
nm
2
n
1
n
m
2
22
21
m
1
12
11
ij
Macierz transmitancji otwartego układu regulacji:
G
o
(s) = G(s) R(s)
jest macierzą kwadratową o m kolumnach i n wierszach.
Y(s) = G
o
(s) E(s) = G
o
(s) [Y
z
(s) – Y(s)]
Stąd otrzymuje się podstawowe równanie macierzowe
opisujące wielowymiarowy zamknięty układ regulacji:
Regulator wielowymiarowy
Regulator wielowymiarowy
[I(s) + G
o
(s)] Y(s) = G
o
(s) Y
z
(s)
PODSTAWY AUTOMATYKI_XI_Złożone układy
automatyki
prof. Józef Lisowski
18
Odsprzężenie układu
Odsprzężenie układu
polega na tym, aby każda z
wielkości regulowanych y(t) była zależna tylko od jednej
wartości zadanej y
z
, natomiast pozostałe wartości
zadane nie miały wpływu na daną wielkość regulowaną,
ani w stanach przejściowych, ani w stanie ustalonym.
Warunek odsprzężenia sprowadza się do tego, aby
macierz otwartego układu regulacji G
o
(s) była macierzą
diagonalną:
Odsprzężenie układu regulacji
Odsprzężenie układu regulacji
m
1
k
km
mk
m
1
k
2
k
k
2
m
1
k
1
k
k
1
o
s
R
s
G
..
..........
0
0
0
..
..........
0
0
0
..
..........
s
R
s
G
0
0
..
..........
0
s
R
s
G
s
R
s
G
s
G
PODSTAWY AUTOMATYKI_XI_Złożone układy
automatyki
prof. Józef Lisowski
19
Spośród m
2
elementów macierzy G
o
(s) tylko m
diagonalnych elementów ma być różnych od zera,
co prowadzi do następujących równoczesnych
warunków pełnego odsprzężenia układu regulacji:
m
1
k
kj
ik
oij
m
,...,
2
,
1
j
,i
,j
i
,
0
s
R
s
G
s
G
PODSTAWY AUTOMATYKI_XI_Złożone układy
automatyki
prof. Józef Lisowski
20
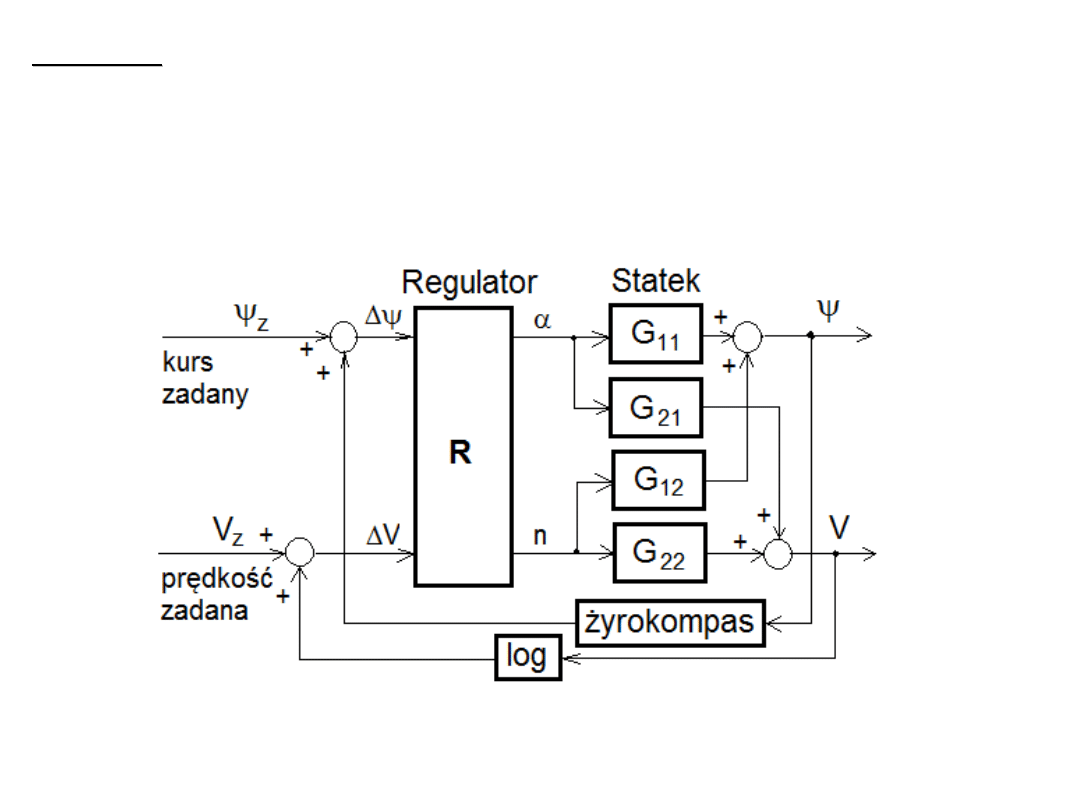
Przykład
Przykład
Zaprojektować dwuwymiarowy regulator R(s) kursu i prędkości V statku
badawczo-szkoleniowego m/s HORYZONT II z odsprzężeniem układu
regulacji.
PODSTAWY AUTOMATYKI_XI_Złożone układy
automatyki
prof. Józef Lisowski
21
s
20
1
10
s
20
1
1
s
10
1
01
,
0
s
10
1
1
,
0
s
G
s
G
s
G
s
G
s
G
22
21
12
11
Transmitancja macierzowa statku jako obiektu regulacji
kursu i prędkości:
Warunki odsprzężenia układu dla wszystkich (i,j) ij:
2
1
k
21
22
11
21
1
k
k
2
21
o
2
1
k
22
12
12
11
2
k
k
1
12
o
0
s
R
s
G
s
R
s
G
s
R
s
G
)
s
(
G
1
j
,
2
i
dla
0
s
R
s
G
s
R
s
G
s
R
s
G
s
G
2
j
,
1
i
dla
PODSTAWY AUTOMATYKI_XI_Złożone układy
automatyki
prof. Józef Lisowski
22
Przyjmując dowolne R
11
(s) oraz R
22
(s) otrzymuje się
transmitancję macierzową regulatora R(s)
zapewniającego odsprzężenie:
s
R
s
R
1
,
0
s
R
1
,
0
s
R
s
R
22
11
22
11
Rozwiązując te równania względem R
12
(s) i R
21
(s)
otrzymuje się transmitancje członów odsprzęgających w
funkcji transmitancji statku i właściwych regulatorów
R
11
(s) i R
22
(s):
s
R
1
,
0
s
R
s
G
s
G
s
R
s
R
1
,
0
s
R
s
G
s
G
s
R
11
11
22
21
21
22
22
11
12
12
PODSTAWY AUTOMATYKI_XI_Złożone układy
automatyki
prof. Józef Lisowski
23
Transmitancja macierzowa odsprzęgniętego układu
otwartego G
o
(s) wyniesie wówczas:
s
R
s
20
1
1
,
10
0
0
s
R
s
10
1
101
,
0
s
R
s
G
s
G
22
11
o
PODSTAWY AUTOMATYKI_XI_Złożone układy
automatyki
prof. Józef Lisowski
24
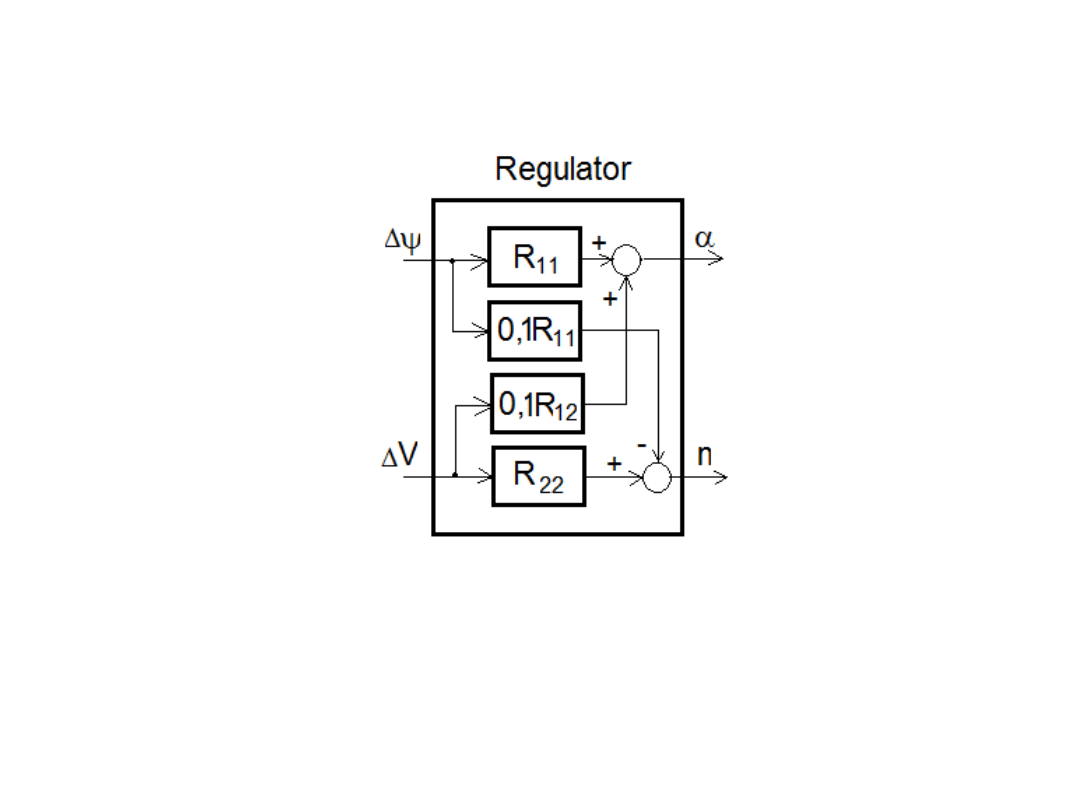
Przyjmując za regulator R
11
(s) regulator typu PID, zaś za
regulator R
22
(s) regulator typu PI, odsprzęgnięty
dwuwymiarowy regulator kursu i prędkości statku będzie
miał pięć nastaw.
Poszukiwana struktura dwuwymiarowego regulatora
kursu i prędkości statku przyjmie postać:
PODSTAWY AUTOMATYKI_XI_Złożone układy
automatyki
prof. Józef Lisowski
25
Document Outline
- Slide 1
- Slide 2
- Slide 3
- Slide 4
- Slide 5
- Slide 6
- Slide 7
- Slide 8
- Slide 9
- Slide 10
- Slide 11
- Slide 12
- Slide 13
- Slide 14
- Slide 15
- Slide 16
- Slide 17
- Slide 18
- Slide 19
- Slide 20
- Slide 21
- Slide 22
- Slide 23
- Slide 24
- Slide 25
Wyszukiwarka
Podobne podstrony:
syposz,podstawy automatyki, ZŁOŻONE UKŁADY REGULACJI
5 Hydrauliczne i pneumatyczne układy automatyki
Sprawozdanie Złożone układy kombinacyjne
uklady automatyk zabezp
08 Złożone układy kombinacyjneid 7323 ppt
template, Studia, Urządzenia i Układy Automatyki - laboratorium
IVTE GR7CW8 Układy automatyki
IVTE GR5 CW8 Układy automatyki
Falownik-sprawko, Politechnika Poznańska (PP), Elementy i układy automatyzacji maszyn, Laboratorium,
labor.mech.2009. , Studia, Urządzenia i Układy Automatyki - laboratorium
sprawko11, Studia, Urządzenia i Układy Automatyki - laboratorium
14 uklady automatycznej regulacjiid 15571 ppt
5 Hydrauliczne i pneumatyczne układy automatyki
Brzo zka Jerzy Regulatory i uklady automatyki 2003
Hydrauliczne i pneumatyczne układy automatyki
12 Podstawy automatyki Układy sterowania logicznego
więcej podobnych podstron