
Propedeutyka automatyki
Propedeutyka automatyki
Wykład
Wykład
1
Literatur
Literatur
a.
a.
1.
W.J.Klimasara, Z.Piłat. Podstawy automatyki i robotyki. WSiP W-wa 2006
2.
Praca zbiorowa pod redakcją Prof.dr inż. Mariusza Olszewskiego. Układy i
systemy mechatroniczne. Część 1, Część 2, Wydawnictwo REA , Warszawa
2009
3.
Praca zbiorowa pod redakcją Prof.dr inż. Mariusza Olszewskiego. Podstawy
mechatroniki, Wydawnictwo REA , Warszawa 2008
4.
Andrzej Dębowski. Automatyka. Podstawy teorii. WNT. Warszawa 2008
2
PA. Podstawowe pojęcia
PA. Podstawowe pojęcia
Automatyka
- "dyscyplina zajmująca się podstawami teorii i praktyczną
realizacją urządzeń sterujących procesami (głównie technologicznymi) bez
udziału lub z ograniczonym udziałem człowieka" - wg. słownika języka polski.
Słowo automatyka zostało wymyślone w Ford Motor Company w latach
czterdziestych ubiegłego wieku. Oznaczało ono zespołowe działanie w wielu
połączonych ze sobą maszyn.
Dzisiaj
metody
automatyki
są
wykorzystywane
również
w
naukach
ekonomicznych (planowanie, organizacja, zarządzanie ), medycznych i rolniczych.
Robot
-
"maszyna, urządzenie techniczne imitujące działanie (czasem nawet
wygląd) człowieka, odznaczające się określonym stopniem automatyzacji". W
roku 1920 czeski pisarz Karel Capek wydał sztukę zatytułowaną "R. U .R.", w
której po raz pierwszy użył terminu robot dla określenia rozumnego urządzenia
wspomagającego pracę człowieka (robota w języku czeskim, i polskim oznacza
pracę).
Robotyka -
"nauka zajmująca się projektowaniem i zastosowaniem robotów,
ich mechaniką i sterowaniem". – wg. Słownika języka polskiego.
Automatyzacją i robotyzacją. -
zastosowanie urządzeń automatyki i
robotyki. Zautomatyzowanie i zrobotyzowanie, gospodarki świadczy o jej
stopniu rozwoju technologicznego. W zakres automatyzacji oprócz działań
czysto technicznych wchodzą również działania o charakterze organizacyjnym i
zarządzającym.
3
PA. Podstawowe pojęcia
PA. Podstawowe pojęcia
Mechanizacja
– pierwszy etap poprawy efektywności pracy
mechanizacja prosta - podstawowe operacje wykonywane za pomocą
narzędzi i siły mięśni (maszyna do szycia),
mechanizacja częściowa - wykorzystanie maszyn do wykonywania
operacji złożonych lub grupy operacji (dostarczanie energii przez maszynę
parową),
mechanizacja kompleksowa - realizacja całego procesu technologicznego
lub jego wyodrębnionej części w ciągu stanowisk pracy ręcznej,
zmechanizowanych w sposób prosty lub częściowy(np. montaż suszarek do
włosów).
Granica między mechanizacją a automatyzacją - trudno obecnie
jednoznacznie
określić.
Cechą
wyróżniającą
automatyzację
jest
podejmowanie decyzji przez urządzenie lub system.
Przykłady mechanizacji i automatyzacji – obsługa prasy.
Mechanizacja – Człowiek zakłada na prasę element wejściowy
(przygotówkę), naciska dwa przyciski startowe, odbiera detal i odkłada
go do magazynu po wykonaniu cyklu obróbki.
Operacje załadunku i rozładunku wykonuje człowiek. Maszyna wykonuje
tylko operacje prasowania.
Automatyzacja -. Blacha dostarczana jest na prasę przez maszynę
podającą (podajnik). Po otrzymaniu sygnału o obecności blachy w
przestrzeni roboczej (prasowania) prasa rozpoczyna cykl prasowania. Po
wykonaniu cyklu prasowania detal bez udziału człowieka odkładany jest
do magazynu.
Operacje załadunku i rozładunku, operacje prasowania wykonuje
maszyna. Człowiek nadzoruje proces
4
PA. Podstawowe pojęcia
PA. Podstawowe pojęcia
Czynniki wpływające na mechanizację i automatyzację procesu
technologicznego
Rachunek ekonomiczny.
•koszt wdrożenia zaawansowanych technologii,
•koszt pracy ludzkiej,
•poprawa konkurencyjności,
Aspekty społeczne i humanitarne .
•zmniejszenia zatrudnienia w początkowym okresie,
•zmiana jakości pracy (współcześnie w zaawansowanych technologicznie
krajach). W miejsce likwidowanych miejsc pracy prostej powstają nowe,
wymagające
wysokich
kwalifikacji,
związane
z
obsługą
i
oprogramowaniem
systemów
automatyki,
programowaniem
sterowników, robotów oraz nadzorem nad utrzymaniem ich w ruchu,
•humanizacja pracy.
Wprowadzanie automatyzacji, z równoczesnym przekwalifikowaniem
załogi, jest często w związku z globalizacją i wzrostem konkurencyjności.
jedynym sposobem obrony pozycji firmy na rynku i utrzymania miejsc
pracy.
5
PA. Podstawowe pojęcia
PA. Podstawowe pojęcia
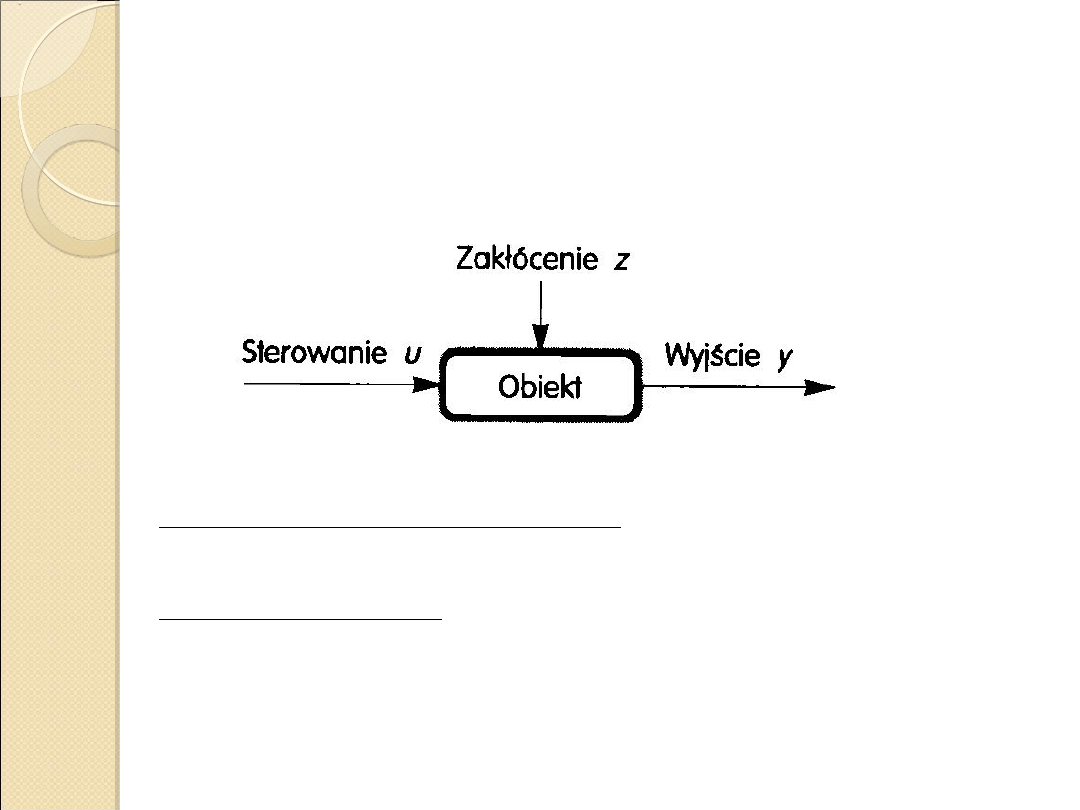
Obiekt
- podstawowe, a jednocześnie jedno z najszerszych pojęć
automatyki. Obiektem może być: narzędzie, urządzenie, instalacja, a
także realizowany proces.
Określenia spotykane w literaturze:
•obiekt sterowany, to obiekt podlegający automatyzacji,
•obiekt elementarny ( najmniejszy, niepodzielny),
•obiekt złożony (grupa obiektów elementarnych) nazywany również
układem lub systemem
•proces sterowany lub po prostu - proces.
Sygnał
- Oznacza on wielkości fizyczne niosące ze sobą informację.
Pojęcie sygnał związane jest również z przepływem energii, masy i
ładunku.
Przykłady: impuls diody z pilota przesłany do telewizora, ciepło palnika,
strumień wody dopływający do zbiornika np. jeziora. Sygnały są
zawiązane z obiektami.
Sygnały wejściowe - sygnały działające na obiekty.
Sygnały wyjściowe - sygnały wytwarzane przez obiekty.
Podział sygnałów wejściowych:
•sygnały wejściowe sterujące lub po prostu sterowania. Na te sygnały
możemy mieć wpływ i możemy je kształtować (np. zmniejszyć dopływ wody
do zbiornika domykając śluzę),
•sygnały wejściowe zakłócające lub po prostu zakłócenia. Sygnały nie
podlegają kształtowaniu, cechuje je przypadkowość i nieprzewidywalność
(np. nie mamy wpływu na zmiany objętości wody w zbiorniku wywołane
opadami lub parowaniem).
6
PA. Podstawowe pojęcia
PA. Podstawowe pojęcia
Oznaczenia grupy sygnałów związane z obiektem w
automatyce:
•u- sygnały wejściowe sterujące,
•z- sygnały wejściowe zakłócające,
•y- sygnały wyjściowe.
Obiekt skalarny lub jednowymiarowym
najprostszy przypadek obiektu sterowanego spotykany bardzo
rzadko, ma jeden sygnał wejściowy i jeden sygnał wyjściowy
Obiekt wielowymiarowy
spotykany powszechnie, ma większą liczbą wejść i wyjść.
7
PA. Podstawowe pojęcia
PA. Podstawowe pojęcia
Model
– przedstawienie obiektu (systemu) odzwierciedlające
właściwości, stany i zachowania obiektów (systemów) rzeczywistych.
Buduje się dla opisu i analizy obiektów systemu.
Modele fizyczne
- np. makiety, obiekty budowane w skali
(zmniejszone lub zwiększone) modele samolotów do wstępnych badań
w tunelach aerodynamicznych. Wiążą się z kosztami. Podczas badań
model ulega zniszczeniu. Nie odzwierciedla on w pełni właściwości
obiektu docelowego.
Modele matematyczne
- stosowane w automatyce. Służą do
badania
własności
i
zachowania
się
obiektów
metodami
obliczeniowymi. Dzięki komputeryzacji główny sposób analizy
obiektów w automatyce.
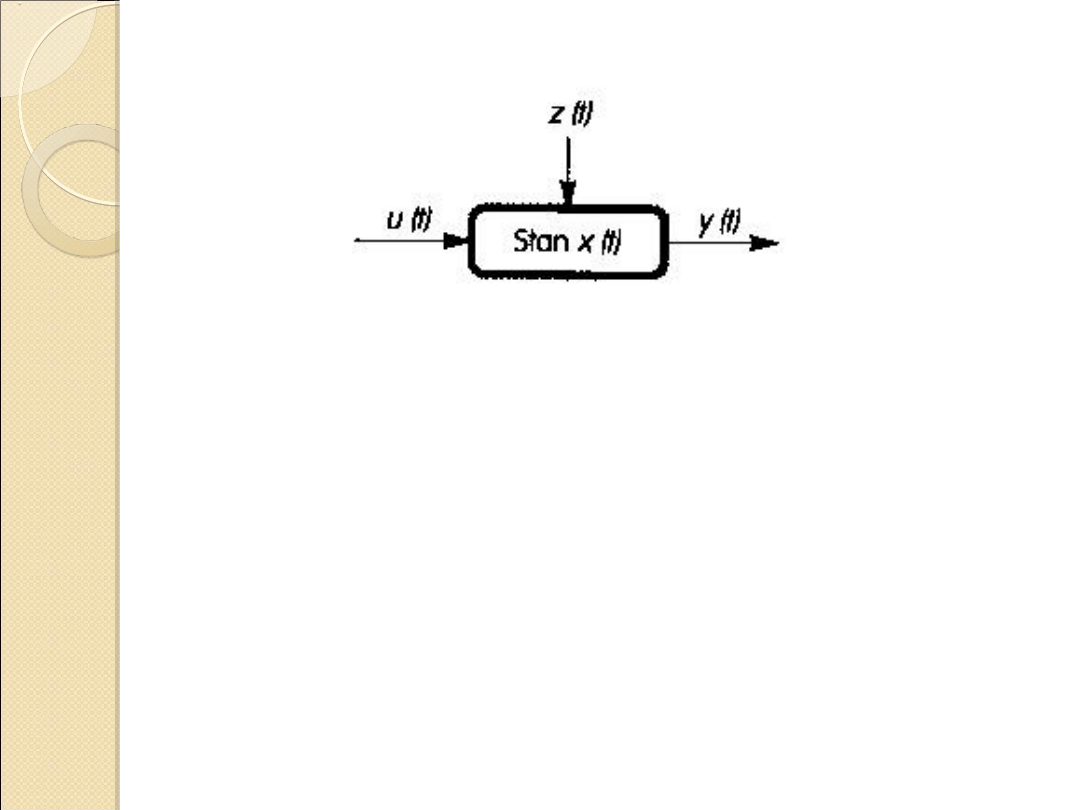
Zmienne - definiowane dla potrzeb budowy modelu matematycznego
obiektu
zmienne wejścia i wyjścia - w funkcji czasu,
zmienne stanu lub współrzędne - określają to, co dzieje się
aktualnie z obiektem
Stan obiektu (x) - najmniejsza liczba wartości zmiennych,
określająca to, co w danej chwili dzieje się z obiektem i
wystarczającą do przewidywania zachowania się obiektu w
przyszłości.
8
PA. Podstawowe pojęcia
PA. Podstawowe pojęcia
n
u
u
u
u
,........
,
2
1
m
x
x
x
x
,........
,
2
1
r
y
y
y
y
,........
,
2
1
Wektor
n
wejść
obiektu;
Wektor stanu
obiektu;
Wektor wyjść
obiektu;
Z (t) - wektor zakłócający. Dla obiektu skalarnego n
= r = 1.
Ogólnie wszystkie zmienne są wektorowe.
9

PA. Podstawowe pojęcia
PA. Podstawowe pojęcia
Model matematyczny obiektu
stanowi zbiór równań opisujących
wzajemne zależności pomiędzy sygnałami wyjściowymi, wejściowymi i
zakłóceniami.
M
od
el powinien być możliwie prosty, lecz wystarczający do realizacji
zadań układu automatyki. Do budowy modelu matematycznego jest
wykorzystywana znajomość obiektu i zachodzących w nim zjawisk,
które opisuje się równaniami.
Teoria automatyki daje pewne wskazówki, jakiego typu opis jest
wygodny dla pewnych, charakterystycznych grup obiektów. Postać
równań matematycznych modelu zależy od własności obiektu..
Najczęściej stosuje się układy równań różniczkowych oraz układy
równań różnicowych.
Identyfikacja
- Bardzo ważny etap sprawdzenie poprawności modelu
matematycznego w porównaniu z obiektem rzeczywistym. Weryfikacji
poddawana jest struktura i przyjęte wartości parametrów.
10
PA. Podstawowe pojęcia
PA. Podstawowe pojęcia
Sterowanie i regulacja.
Sterowanie - świadome i celowe oddziaływanie na obiekt, z zamiarem
uzyskania określonego oczekiwanego zachowania się obiektu.
Oczekiwane zachowanie się obiektu opisywane jest przy pomocy
zadanych wartości wielkości sterowanych.
Oczekiwaną wartość wielkości zadanej (sterowanej) uzyskuje się przez
dostarczenie do obiektu odpowiednich wejściowych sygnałów
sterujących.
Za wytworzenie odpowiednich sygnałów sterujących odpowiada
regulator układu sterowania .
Układ sterowania tworzą razem regulator i obiekt.
Do prawidłowego działania regulatora niezbędne jest dostarczenie mu:
•informacji o wartości wielkości zadanej,
•informacji o stanie obiektu,
•rzeczywistej wartości wielkości regulowanej (nie jest to jednak
regułą).
Przykład 1.
Układu sterowania temperaturą w domu. Zadana temperatura wewnątrz domu.
Wariant l. Działanie urządzenia sterującego nie zależy od rzeczywistej temperatury
wewnątrz domu. Moc ogrzewania określamy na podstawie temperaturze na zewnątrz oraz przebiegu
średniej temperatury w ciągu roku.
Urządzenie sterujące zmienia intensywności ogrzewania zgodnie z zaplanowanymi zmianami
znanych wartości temperatury (program). Jeśli zmiany temperatury otoczenia będą inne niż
zakładane, sterowanie nie będzie skuteczne. Takie urządzenie sterujące jest proste i tanie w realizacji.
Wariant 2. Działanie urządzenia sterującego zależy od rzeczywistej temperatury wewnątrz
domu. Jeżeli temperatura jest za wysoka, ogrzewanie zostaje zmniejszone. Gdy temperatura jest zbyt
niska, ogrzewanie intensyfikuje się.
Urządzenie sterujące musi być wyposażone w czujnik temperatury w pomieszczeniu oraz zawierać
układ przetwarzania zmierzonej wartości do postaci akceptowanej przez sterownik. Temperatura w
domu okaże się bliższa zadanej nawet przy zmianach temperatury otocznia. Układ bardziej
skomplikowany i droższy.
11
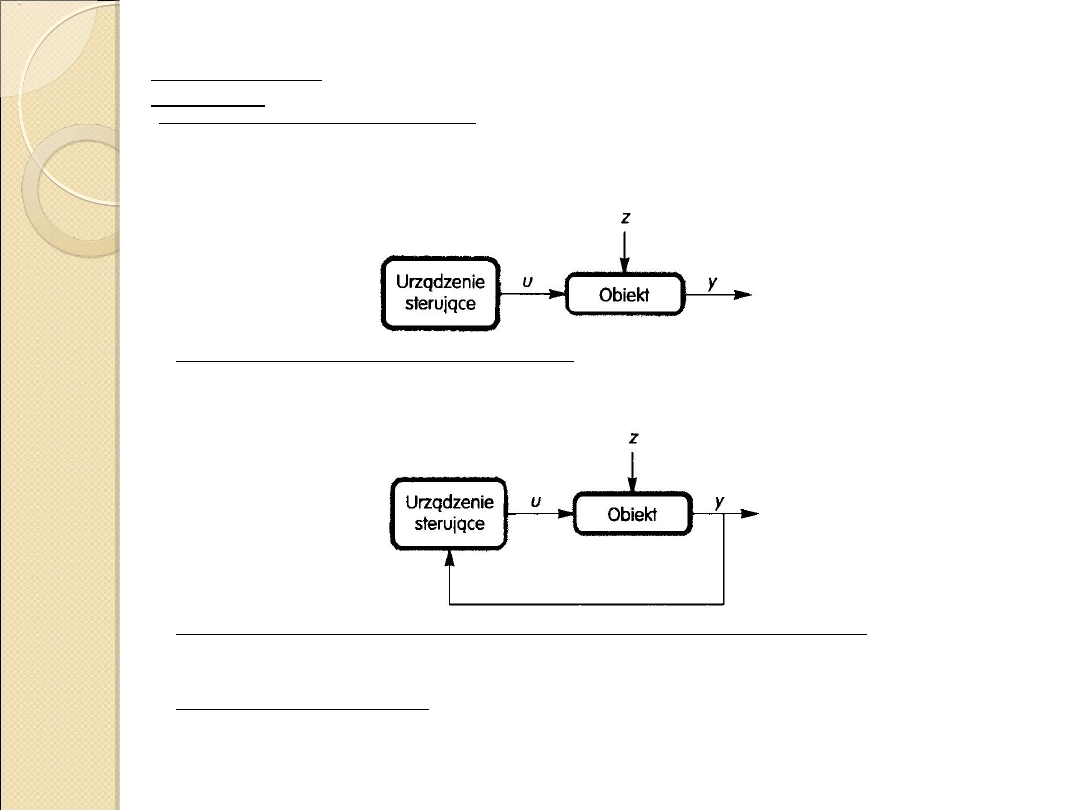
Ważny podział
układów.
Otwarty układ sterowania. Działanie urządzenia sterującego (regulatora)
nie jest powiązane z wartością wielkości regulowanej (temperaturą
wewnątrz). Rzeczywista wartość wielkości regulowanej (temperatury
wewnątrz) nie ma wpływu na działanie regulatora. (wariant I).
PA. Podstawowe pojęcia
PA. Podstawowe pojęcia
Zamknięty
układ
sterowania.
Działanie
urządzenia
sterujące
(regulatora) powiązane jest z wartością wielkości regulowanej
(temperaturą wewnątrz). Jego praca zależy od skuteczności regulacji
(wariant 2).
Sterowanie w układzie zamkniętym nazywa się regulacją.
Pojęcie sterowania jest szersze niż regulacji. Każda regulacja jest
sterowaniem, ale nie każde sterowanie jest regulacją.
Sprzężenie zwrotne - połączenie informacyjne używane do
kształtowania
sygnału
wejściowego
(tzn.
sterowania)
z
wykorzystaniem wartości sygnału wyjściowego.
12
PA. Podstawowe pojęcia
PA. Podstawowe pojęcia
Dwa typy sprzężenia zwrotnego:
•dodatnie - składową pochodzącą od sprzężenia dodaje się do
podstawowego sygnału wejściowego,
•ujemne - składową pochodzącą od sprzężenia odejmuje się od
podstawowego sygnału wejściowego.
W praktyce stosuje się układy zamknięte z ujemnym sprzężeniem
zwrotnym.
Sygnał sprzężenia zwrotnego wpływa tylko częściowo na wartość
wielkości sterującej wypracowanej w regulatorze (zgodnie z jego
algorytmem i realizowanym zadaniem sterowania). Tworzy składową
uwzględnianą
przy
wypracowaniu
końcowej
wartości
sygnału
sterującego, który wysyłany jest do obiektu jako jego sygnał wejściowy.
Stabilność
Układ jest stabilny, gdy po wytrąceniu z równowagi przez różne
zdarzenia wraca po określonym czasie do poprzedniego stanu.
Funkcję układu sterującego, wytwarzającego sygnały dla obiektu, może
spełniać nie tylko regulator ale również człowiek.
Tryby pracy układu sterowania:
•ręczny (manualny) - za sterowanie odpowiada człowiek. Skrót MAN ;
Ręczne kierowanie samochodem w celu utrzymania stałej prędkości w
oparciu o ogólne zasady jazdy, doświadczenia, aktualnego stanu
fizycznego i psychicznego. Człowiek nie operuje w ogóle pojęciem
modelu pojazdu
•automatyczny - gdy sygnały sterujące wytwarzane są przez
urządzenie, regulator, sterownik, komputer. Skrót AUTO.
Utrzymanie
stałej prędkości przy pomocy tempomatu. Efekt sterowania zależy od
jakości sterownika, jakości modelu matematycznego pojazdu i
algorytmu sterowania,
13
PA. Podstawowe pojęcia
PA. Podstawowe pojęcia
Z regulacją automatyczną mamy do czynienia wtedy, kiedy układ
sterowania o strukturze zamkniętej pracuje w trybie automatycznym.
Elementy określające pracę układów sterowania:
•zdefiniowane zadanie sterowania, czyli informacja o celach
sterowania. Ma zwykle postać przebiegu wartości zadanej,
•określony algorytm pracy (algorytm regulacji, algorytm sterowania),
czyli ścisłe określone zasady wypracowania sygnału sterującego
realizującego zadania sterowania.
Algorytm to zbiór reguł określających, oddziaływanie układu
sterowania na obiekt sterowany. Oddziaływanie prowadzi do uzyskania
oczekiwanego zachowania obiektu sterowanego. Reguły te są
opracowywane na podstawie modelu matematycznego zachowań
obiektu.
Dział automatyki zajmujący się opracowaniem struktury i algorytmu
regulacji (projektowanie) nosi nazwę - synteza układów sterowania.
Metody syntezy zależą od :
cech obiektu sterowanego,
stosowanych metod matematycznych (w tym opisu modelu) oraz
zadań sterowania.
Regulacja automatyczna - główny temat naszych
rozważań.
14
PA. Podstawowe pojęcia
PA. Podstawowe pojęcia
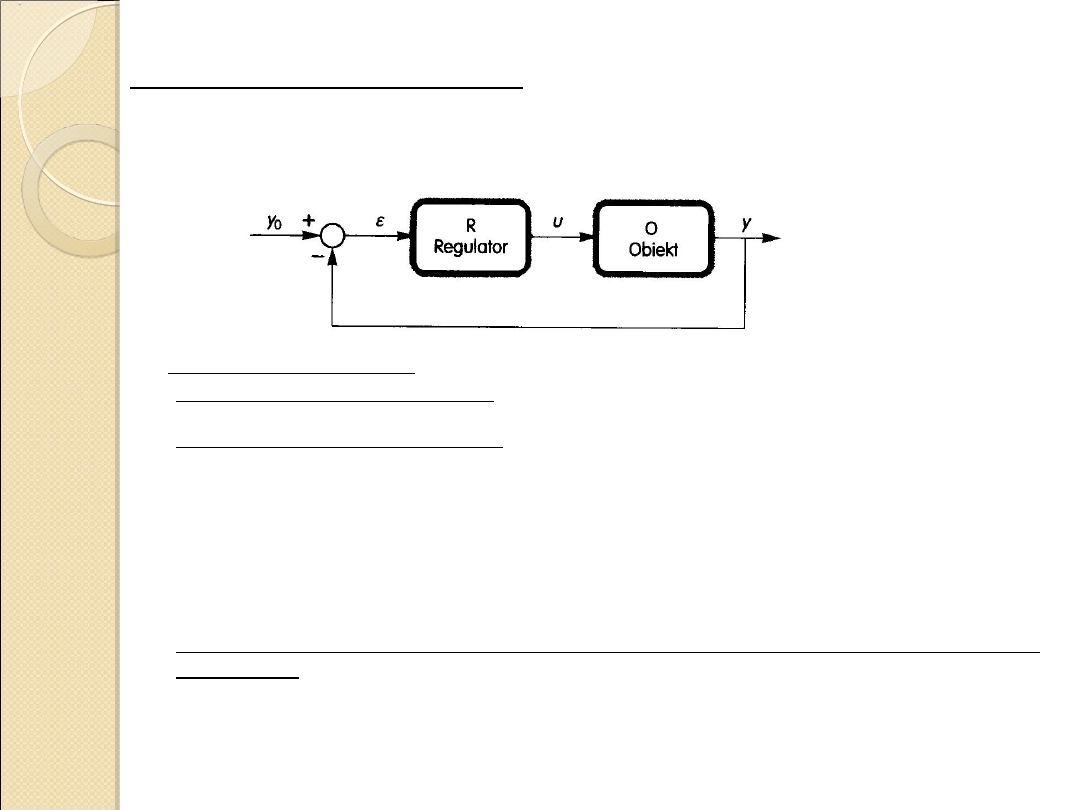
Regulacja jednej zmiennej wyjściowej obiektu - typowy najprostszy,
przykład układu sterowania.
Realizacja układów regulacji.
Wejście układu sterowania - wartość zadana y
0
.
Uchyb regulacji lub uchyb - sygnał uzyskany przez odjęcie wartość
rzeczywistej od wartości zadanej.
ε = y
0
– y
Uchyb jest podawany na wejście regulatora R. Jego wartość jest użyta
do wypracowania sygnału sterującego u, który podawany jest na
wejście obiektu O. Algorytm działania regulatora dąży do minimalizacji
wartości uchybu.
Przykłady układów sterowania, których zadaniem jest regulacja jednej
zmiennej:
•regulacja poziomu wody w zbiorniku (zapora na rzece),
•regulacja temperatury (żelazko, lodówka),
•regulacja prędkości obrotowej (mikser, wiertarka).
Zadanie sterowania - uzyskanie na wyjściu obiektu sygnału o
wartości zgodnej z wartością zadaną.
15
PA. Podstawowe pojęcia
PA. Podstawowe pojęcia
Realizacja układów rzeczywistych :
sygnał wartości zadanej musi mieć swoje źródło - zadajnik.
węzeł sumacyjny w praktyce jest elementem fizycznym, realizującym
dodawanie / odejmowanie sygnałów. Sygnały, które do węzła dochodzą,
muszą być tego samego typu (muszą mieć ten sam charakter fizyczny).
w torze sprzężenia zwrotnego znajduje się zawsze urządzenie
pomiarowe. składające się z dwóch części: czujnika pomiarowego i
przetwornika sygnałów. Zadaniem czujnika jest zmierzenie sygnału
wyjściowego z obiektu, natomiast przetwornik przekształca ten sygnał do
takiej postaci, aby w węźle sumacyjnym mógł on być odjęty od wartości
zadanej.
sygnał wartości zadanej nie musi mieć dokładnie takiego samego
charakteru fizycznego, jak sygnał sterowany (wyjściowy z obiektu).
z węzła sumacyjnego otrzymujemy na wyjściu sygnał uchybu, który jest
sygnałem wejściowym do regulatora.
sygnał z regulatora najczęściej nie jest podawany wprost do obiektu,
gdyż po drodze znajduje się jeszcze urządzenie wykonawcze, które
dostarcza energię do obiektu. Na przykład: Obiektem jest zbiornik z wodą
a sterowanie polega na regulacji temperatury wody. Regulator
wypracowuje sygnał sterujący grzałką, która stanowi urządzenie
wykonawcze.
16
PA. Podstawowe pojęcia
PA. Podstawowe pojęcia
Rodzaj i charakterze sygnałów występujących w układach sterowania
Sygnały przekazywane w układzie sterowania reprezentują wielkości
fizyczne z którymi są związane Dotyczy to zarówno sygnałów wyjściowych,
jak i sterujących.
Ogólnie sygnały można je podzielić na cztery grupy:
•Sygnały mechaniczne - mogą być wytwarzane za pomocą krzywek,
dźwigni itp. np. katarynka - szybkość obrotu bębna wpływa na tempo
odtwarzanego utworu,
•Sygnały hydrauliczne - wytwarzane najczęściej przez czujniki przepływu
(zwężki pomiarowe) lub czujniki ciśnienia, np. podczas regulacji poziomu
wody w zbiorniku na podstawie ciśnienia na jego dnie.
•Sygnały pneumatyczne - wytwarzane przez różnego rodzaju czujniki
ciśnienia (membranowe, mieszkowe). Są one powszechnie stosowane w
urządzeniach automatyki wykorzystujących napędy pneumatyczne, np. w
regulatorach ciśnienia w zespole przygotowania powietrza.
•Sygnały elektryczne - obecnie najpopularniejsze. Dla większości
wielkości fizycznych opracowano przetworniki do czujników pomiarowych,
dzięki którym można uzyskać wartość mierzoną w postaci sygnału
elektrycznego: analogowego lub cyfrowego. Na przykład w urządzeniach
gospodarstwa domowego zadaną prędkość obrotową silnika ustawia się
za pomocą potencjometru.
Ostatni przykład pokazuje, że wartość zadaną przekazuje się w postaci
sygnału zupełnie innego typu, o zupełnie innym charakterze - prędkość
obrotowa jest zadawana sygnałem napięcia elektrycznego.
17
PA. Podstawowe pojęcia
PA. Podstawowe pojęcia
Układy i urządzenia automatyki określone przez funkcje sygnału - trzy
podstawowe grupy :
•układy pomiarowe,
•regulatory,
•układy wykonawcze
Podgrupy określone rodzajem sygnału: mechaniczne, hydrauliczne,
pneumatyczne i elektryczne.
Czujniki - pomiar wartości sygnału.
Elementy sensoryczne - mierzone sygnały mechaniczne, elektryczne,
pneumatyczne i hydrauliczne przetwarzane są przez przetworniki na
sygnały elektryczne.
Zadajniki wartości zadanej wysyłają sygnał elektryczny. Często są one
połączone z regulatorem którym najczęściej jest sterownik przemysłowy,
w pamięci którego są zapisane wymagania dotyczące wartości zadanej i
program sterowania realizujący wyliczenie uchybu.
Regulatory - Zdecydowaną przewagę zdobyły regulatory zbudowane z
układów elektronicznych. Operujące sygnałami elektrycznymi.
Układy wykonawcze - podobnie. Coraz częściej są to układy elektryczne,
aczkolwiek wciąż jest w nich dużo mechaniki, hydrauliki i pneumatyki.
Układy mechaniczne są bardzo szybkie i niebywale trwałe. Elementy
elektryczne natomiast stwarzają niebezpieczeństwo powstania iskry,
więc nie nadają się do pracy w środowisku zagrożonym wybuchem
18
Document Outline
- Slide 1
- Slide 2
- Slide 3
- Slide 4
- Slide 5
- Slide 6
- Slide 7
- Slide 8
- Slide 9
- Slide 10
- Slide 11
- Slide 12
- Slide 13
- Slide 14
- Slide 15
- Slide 16
- Slide 17
- Slide 18
Wyszukiwarka
Podobne podstrony:
Prop aut W1 Podst poj
Prop aut W12 Robotyka 2003
Prop aut W2 2003
Prop aut W9 Ses cyfr Przetworniki fotoelektryczne
Podst poj i pr chem id 366070 Nieznany
e-learning prop med W1, EDUkacja, e-learning
funkcje podst poj
Prop aut W9 Ses cyfr Przetworniki fotoelektryczne
Podst poj i pr chem id 366070 Nieznany
e-learning prop med W1, EDUkacja, e-learning
Prop aut W2
Prop Aut Sensoryka W3
Prop aut W9 Ses cyfr Przetworniki fotoelektryczne
funkcje podst poj
Prop aut W12 Robotyka
fizyka 2003 styczeń podst
2003 styczen podst model id 381 Nieznany (2)
więcej podobnych podstron