ANALIZA
DYNAMICZNA
MANIPULATORÓW
JAKO
MECHANIZMÓW
PRZESTRZENNYCH
Chwilowy stan przestrzennego ruchu ogniwa i określają:
wektor prędkości kątowej członu
wektor prędkości liniowej
T
Oiz
Oiy
Oix
Oiz
Oiy
Oix
Oi
v
v
v
v
v
v
v
T
iz
iy
ix
iz
iy
ix
i
ω
ω
ω
ω
ω
ω
ω

T
Si
Si
Si
Si
Si
Si
Si
z
y
x
z
y
x
r
punktu O
i
, w którym przyjęto początek układu współrzędnych
x
i
y
i
z
i
związanego z członem i
Jeśli ponadto dane są
• masa ogniwa
m
i
• wektor położenia środka masy
względem układuOx
i
y
i
z
i

• macierz tensora bezwładności członu
[J]
Oi,
to można wyznaczyć wektory pędu i momentu pędu – krętu
członu względem punktu O
i
wg następujących zależności
)
r
ω
v
(
m
p
Si
i
Oi
i
i
(równanie wektorowe pędu)
)
v
r
(
m
ω
H
Oi
Si
i
i
Oi
Oi
[J]
(równanie wektorowe krętu)

Jeśli osie układu
x
i
y
i
z
i
pokrywają się z osiami symetrii ogniwa, to macierz tensora
bezwładności
2
2
2
0
0
0
0
0
0
[J]
iz
iy
ix
i
Oi
k
k
k
m

Wypadkową siłę i wypadkowy moment sił bezwładności
względem punktu O
i
wyznacza się według równań
dynamiki Newtona, które można zapisać w postaci
wektorowej
i
i
i
i
p
ω
p
F
(równanie wektorowe sił)
i
Oi
Oi
i
Oi
Oi
p
v
H
ω
H
M
(równanie wektorowe momentów sił)

iz
iy
iy
iz
ix
ix
p
p
p
F
ix
iz
iz
ix
iy
iy
p
p
p
F
iy
ix
ix
iy
iz
iz
p
p
p
F
(równania skalarowe sił)
lub w postaci skalarowej

iy
Oiz
iz
Oiy
Oiz
iy
Oiy
iz
Oix
Oix
p
v
p
v
H
ω
H
ω
H
M
iz
Oix
ix
Oiz
Oix
iz
Oiz
ix
Oiy
Oiy
p
v
p
v
H
ω
H
ω
H
M
ix
Oiy
iy
Oix
Oiy
ix
Oix
iy
Oiz
Oiz
p
v
p
v
H
ω
H
ω
H
M
(równania skalarowe momentów sił)
Równania wektorowe i skalarowe pędów oraz
wektorowe i skalarowe sił i momentów sił opisują
dynamikę ruchu członu manipulatora robota
w układzie współrzędnych związanych z tym członem
w punkcie O
i
i przy czym położenie punktu O
i
i orientację
układu x
i
y
i
z
i
można przyjąć tak, aby uwzględnić więzy
nałożone na ogniwo i

Współrzędne wektora prędkości punktu O
i
w układzie x
i
y
i
z
i
związanym z ogniwem i można wyznaczyć ze wzoru
i
Oi
iO
iO
i
Oi
)
r
(
T
T
)
v
(
1
gdzie:
i
iO
...A
A
A
T
2
1
E
T
T
iO
iO
1
T
i
Oi
)
r
(
1
0
0
0
1
0
0
0

Współrzędne wektora prędkości kątowej członu w
układzie x
i
y
i
z
i
można wyznaczyć z zależności
i
iO
i
i
ω
T
)
ω
(
1
1
1
2
1
32
2
1
21
1
1
i,i
i
i
ω
...A
A
A
...
...
ω
A
A
ω
A
ω
ω
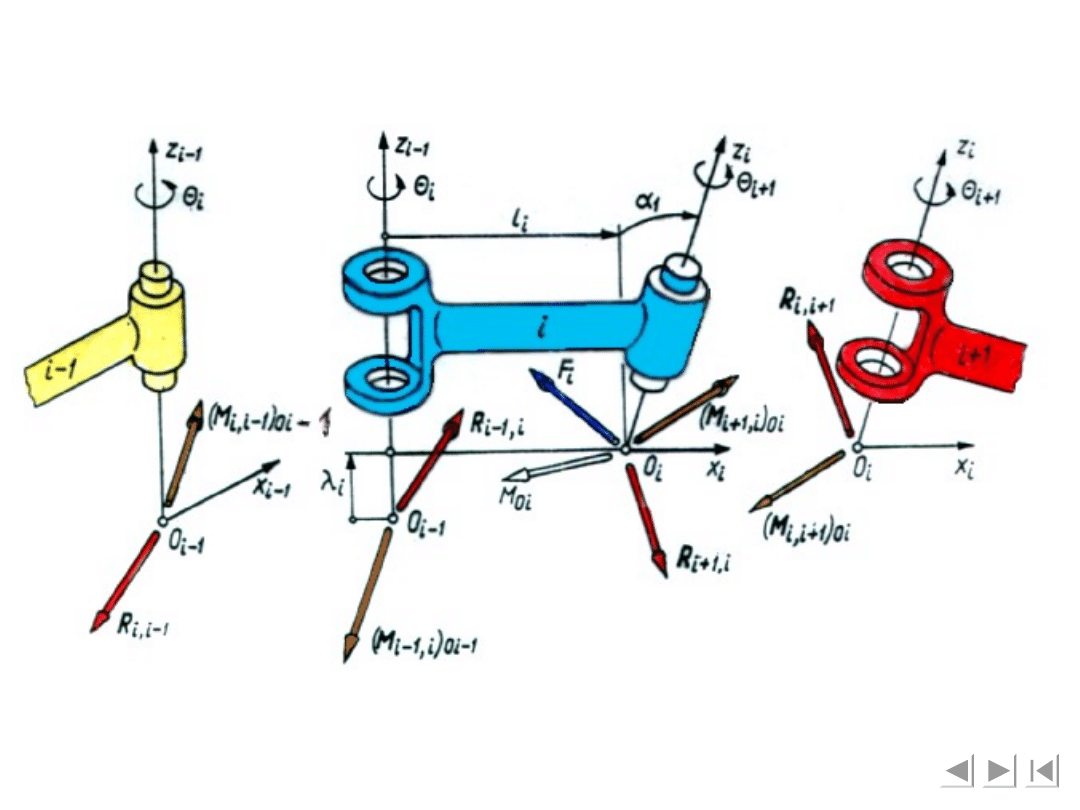

Na rysunku przedstawiono schemat rozkładu sił działających
na ogniwo i oraz sił i momentów sił oddziaływania ogniw
w parach obrotowych. Przyjęto oznaczenia (***)
,i
i
R
1
- wektor siły oddziaływania ogniwa i - 1 na ogniwo i
1
1
Oi
,i
i
M
- wektor momentu sił oddziaływania ogniwa
i – 1 na ogniwo i względem punktu O
i-1
,i
i
R
1
- wektor siły oddziaływania ogniwa i + 1 na ogniwo i
Oi
,i
i
M
1
- wektor momentu sił oddziaływania ogniwa
i + 1 na ogniwo i
i
F
- wektor siły wypadkowej
Oi
M
- wektor wypadkowego momentu względem
punktu O
i
sił działających na ogniwo i

Równania równowagi dynamicznej ogniwa i w
układzie odniesienia związanym z tym ogniwem
przy uwzględnieniu ogólnego równania dynamiki
wynikającego z zasady d’Alemberta są następujące:
• w odniesieniu do sił
0
A
1
1
1
,i
i
i
,i
i
i
R
F
R
• w odniesieniu do momentów sił
0
A
A
A
1
1
1
1
1
1
1
1
,i
i
i
i
Oi
i
Oi
,i
i
Oi
Oi
,i
i
i
R
r
M
M
M

W przypadku gdy para łącząca ogniwa i – 1 z i jest
parą obrotową, wtedy składowa momentu
z
,i)
i
M
1
skierowana wzdłuż osi pary jest równa momentowi
napędowemu lub momentowi oporu ruchu.

W przypadku pary przesuwnej składowa reakcji
,i,z
i
R
1
skierowana wzdłuż osi przesuwu jest równa sile
napędowej lub sile oporu przesuwu w tej parze.
Gdy dane są wymiary schematu kinematycznego
mechanizmu,
rozkłady
mas
ogniw
oraz
przemieszczenie, prędkość i przyspieszenie ogniwa
napędowego, wtedy z równań równowagi
dynamicznej można wyznaczyć siły i momenty
reakcji w parach kinematycznych oraz siłę
względnie moment napędowy zapewniający ruch
mechanizmu manipulatora robota z żądaną
prędkością, wyrównoważyć robota statycznie i
dynamicznie.
Document Outline
- Slide 1
- Slide 2
- Slide 3
- Slide 4
- Slide 5
- Slide 6
- Slide 7
- Slide 8
- Slide 9
- Slide 10
- Slide 11
- Slide 12
- Slide 13
- Slide 14
- Slide 15
Wyszukiwarka
Podobne podstrony:
04 Analiza kinematyczna manipulatorów robotów metodą macierz
5 Analiza kinematyczna manipulatorów robotów metodą wektorow
9 Dynamika manipulatorów i robotów, przykład
04 Analiza kinematyczna manipulatorów robotów metodą macierz
więcej podobnych podstron