ANALIZA
KINEMATYCZNA
MANIPULATORÓW
ROBOTÓW METODĄ
WEKTOROWĄ

Względne usytuowanie osi par kinematycznych i
położenie
ogniw
przestrzennego
łańcucha
kinematycznego
można
opisać
za
pomocą
następujących iloczynów skalarowych i
wektorowych
i
i
i
e
e
cos
1
i
i
i
i
a
e
e
sin
1
1
1
cos
i
i
i
a
a
1
1
sin
i
i
i
i
e
a
a

z powyższych równań można wyprowadzić
następujące zależności
i
i
i
i
i
i
e
a
e
e
sin
cos
1
i
i
i
i
i
i
a
e
a
a
sin
cos
1
gdzie:
i
e
- wersor osi pary kinematycznej łączącej
ogniwo i z ogniwem i-1,
i
a
-
wersor
prostopadłej
do
osi
par
kinematycznych ogniwa i
α
i
- kąt zawarty między osiami par
kinematycznych ogniwa i, które mogą być
usytuowane skośnie,
θ
i
- kąt obrotu względnego członów i-1
oraz i

Kąty
α
i
i θ
i
przyjmuje się jako kąty zorientowane. Ich zwroty
określa się według śruby prawoskrętnej, czyli tak
aby trójka wersorów
i
e
1
i
e
i
a
tworzyła układ prawoskrętny
W podobny sposób definiuje się zwrot kąta θ
i
tak,
aby trójka wersorów
1
i
a
i
a
i
e
tworzyła układ prawoskrętny
Gdy znane są dwa wersory
i
e
j
e
oraz kąty jakie tworzą z trzecim nieznanym wersorem
k
e
wtedy stosując wzór Chace’a można otrzymać
2
1
ij
j
i
ij
j
ik
ij
jk
i
jk
ij
ik
k
c
e
e
D
e
c
c
c
e
c
c
c
e

jk
ik
ij
jk
ik
ij
ij
c
c
c
c
c
c
D
2
1
2
2
2
j
i
ij
e
e
c
k
i
ik
e
e
c
k
j
jk
e
e
c
W wielu przypadkach analizy kinematycznej
wykorzystuje się równanie zamknięcia łańcucha
kinematycznego, które można zapisać w postaci
równania wektorowego
n
i
i
i
i
i
a
l
e
1
0

gdzie
:
λ
i
– odległość między ogniwem i-1 oraz
ogniwem i, mierzona wzdłuż osi pary łączącej
te człony w przypadku pary przesuwnej λ
i
jest
zmienna, a w przypadku pary obrotowej λ
i
=
idem;
Odległość
między
osiami
par
kinematycznych członu i oznaczono przez l
i
;
w przypadku, gdy jedna z par jest przesuwna
l
i
= 0
Z równania wektorowego
n
i
i
i
i
i
a
l
e
1
0
można wyznaczyć jeden niewiadomy wersom lub
trzy niewiadome wartości skalarów – długości i
kątów
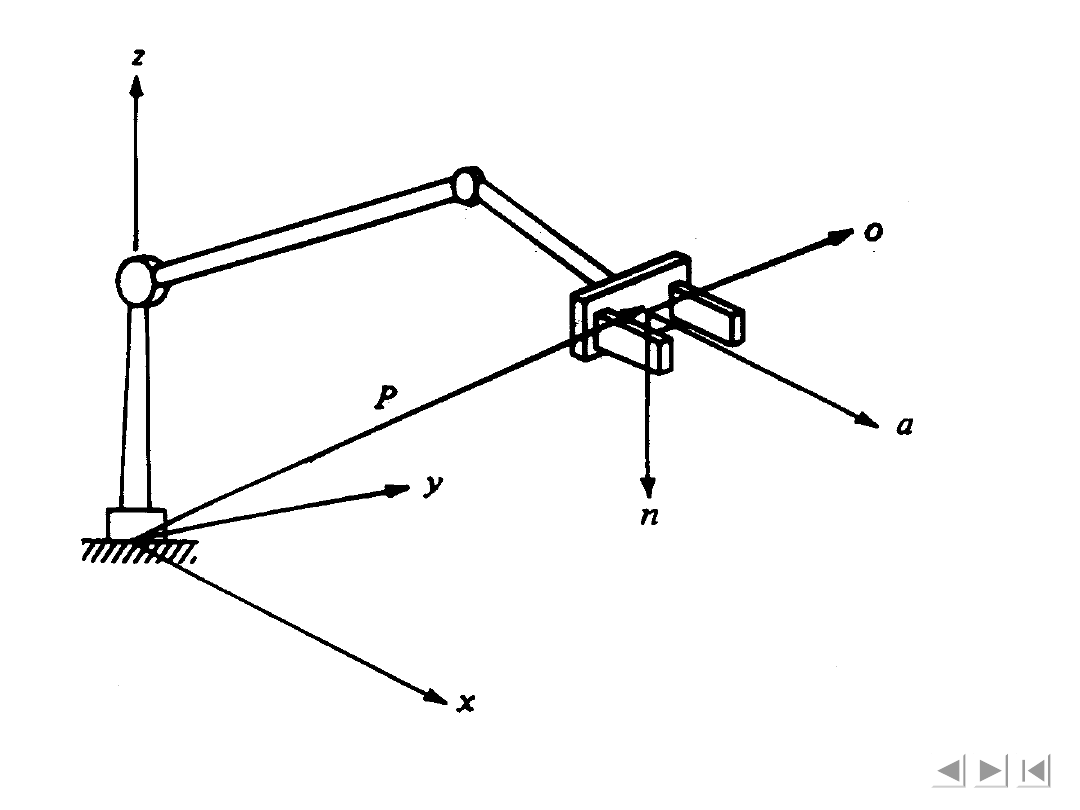
Figure 4-7 The vectors o, a,
n, and p for a robot
manipulator.
Rysunek 4-7 Wektory o, a, n oraz p dla
manipulatora robota.
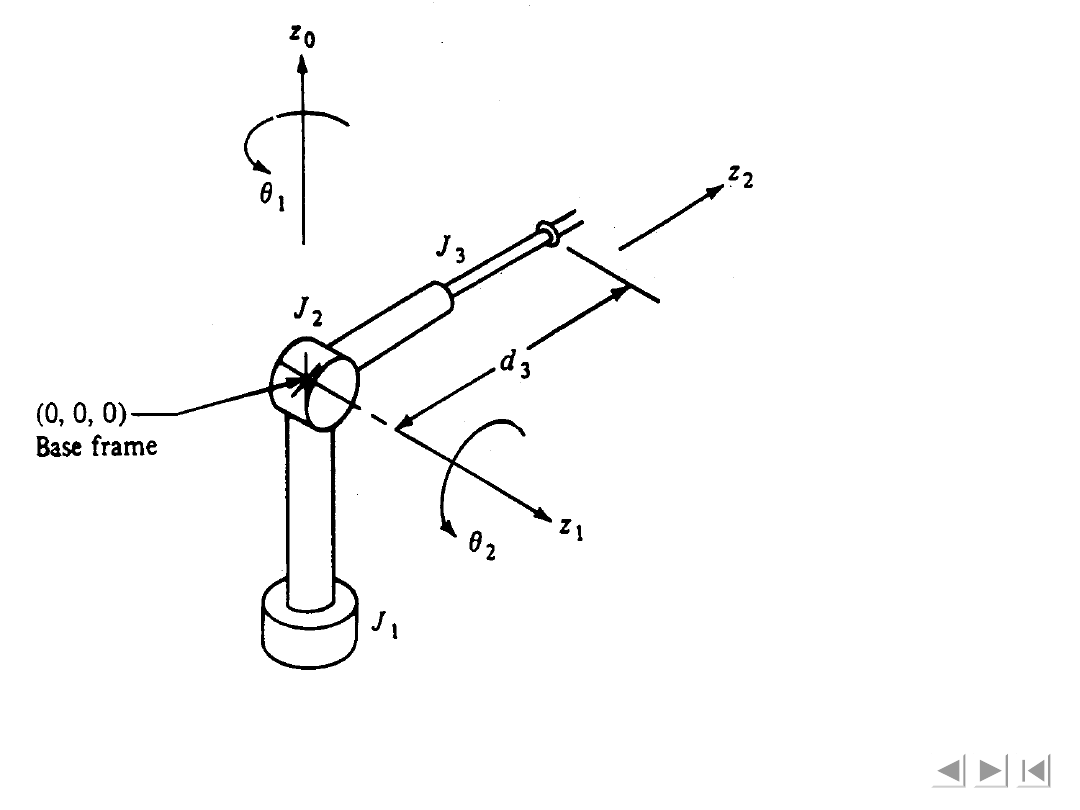
Figure 4-9 A three-dimensional 3 degree-of-freedom
manipulator (type TRL).
Rysunek
4-9
Trójwymiarowy,
trójczłonowy manipulator (typ: z
translacją, rotacją, wysuwem).
Document Outline
Wyszukiwarka
Podobne podstrony:
04 Analiza kinematyczna manipulatorów robotów metodą macierz
04 Analiza kinematyczna manipulatorów robotów metodą macierz
1 Analiza kinematyczna manipula Nieznany (2)
08 Kinematyka manipulatorów i robotów, przykładid 7261 ppt
2 Wprowadzenie do kinematyki manipulatorów robotów
więcej podobnych podstron